Diseño de la interfaz electrónica Vigía 2 para supervisar y controlar eventos con una PC
127
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubian” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419. 2.
(3) PENSAMIENTO. “Esto es realista, muy realista, en un mundo donde la comunicación es cada vez mayor, no vivimos en la Edad Media, no vivimos ni podemos vivir como aquellos indios siboneyes y taínos que habitaban nuestra tierra hace 500 años, vivimos en un mundo donde en cuestión de horas se viaja de un continente a otro; vivimos en el mundo de las comunicaciones, de la radio, de la televisión, de los libros, de los teléfonos a larga distancia, y esa tendencia hacia la comunicación entre todos los países será cada vez mayor; y en ese mundo tenemos que aprender a vivir cada vez más adaptados y cada vez mejor preparados.” Fidel Castro. (Noviembre de 1993). 3.
(4) AGRADECIMIENTOS Agradecer es una virtud humana, es la manera más sencilla de corresponder aquel apoyo que aligeró nuestra carga y facilitó el camino hacia la cúspide de los triunfadores, donde se consuman nuestros sueños y metas. Lleguen mis más sinceros agradecimientos:. A mis padres, Norlys Valdivia González y Luis Antigua Expósito, por regalarme la vida y enseñarme a vivirla, porque siempre velaron por mi felicidad e iluminaron los senderos para fortalecer y asegurar mis pasos a través del mundo. Especialmente a mi papá por su apoyo y entrega total en el desarrollo de este proyecto, por esas noches de desvelo a mi lado, por la inmensa paciencia. que me tuvo, por ser persistente para lograr que su. “linda” aprendiera e intentar cederle un poquito de su gigantesca sabiduría.. A mi abuela Norma González Lorenzo por sus buenos consejos. A toda mi familia por la ayuda brindada.. A mi novio Ruden Morgado Bravo por su apoyo incondicional y motivarme siempre que lo necesité. Al Dr. Ing. Juan Pablo Barrios Rodríguez por su asesoramiento. A Enrique Carlos Hernández Pérez por su ayuda en la conformación del trabajo, referente a la metodología de investigación. A todos mis profesores por su dedicación y por haber contribuido en mi formación como profesional de la ingeniería. A mi amigo Reinel Sergio Luna Pérez por su invaluable amistad, por todos los inolvidables momentos que vivimos juntos desde el primer año de la carrera, y que aún nos quedan por compartir, por ser mi confidente y mi cómplice en todo momento. A mis amigas de la universidad por todas las buenas y malas vivencias que compartimos juntas durante los 5 años de la carrera, de las que brotó una. 4.
(5) linda y eterna amistad, y porque de una forma u otra me ayudaron a formarme como ingeniera. A mis compañeros de estudio por transitar juntos estos cinco años llenos de experiencias. A todas las personas que de cierto modo han contribuido y hecho posible la realización de este trabajo. A todos ellos, les estaré eternamente agradecida.. 5.
(6) DEDICATORIA Al dedicar el fruto de un sueño que desborda tesón, sacrificio y paciencia, depositamos el más profundo amor en ello, porque va consagrado a esos seres que simbolizan lo más grandioso y lindo de nuestras vidas; es por eso que este trabajo se lo dedico: A mis padres, que fueron mis ídolos y mi inspiración para convertirme en una ingeniera, y pusieron todo su empeño para ayudarme a hacer mi sueño realidad. A mi hermano, que me acompañó a celebrar mis victorias y llorar mis derrotas. A mi abuela “Mima”, que siempre está colmada de ternura, amor y de eternas sonrisas para regalarle a su “princesa”. A mi tía Marilín y a mi tío Randy, por la ayuda brindada y por enseñarme que el corazón no entiende de distancias. A toda mi familia por apoyarme siempre y animarme para cumplir mis metas.. 6.
(7) TAREAS TÉCNICAS 1. Revisión de la literatura relacionada con el tema de los sistemas de supervisión y control. 2. Realización de un estudio detallado sobre el sistema de supervisión de eventos por puerto paralelo Vigía 1. 3. Análisis de los componentes que integrarán el nuevo sistema de supervisión y control de eventos por puerto paralelo que se precisa desarrollar. 4. Conformación de los diagramas circuitales del nuevo sistema empleando el software Multisim para la simulación de la interfaz. 5. Evaluación de la efectividad de la propuesta al dar solución a las limitaciones del sistema Vigía 1.. 7.
(8) RESUMEN El presente trabajo tiene el propósito de diseñar un sistema electrónico para la supervisión y control de eventos por puerto paralelo, a través de una interfaz electrónica flexible, que supere las dificultades del ya existente Vigía1, instalado en las sucursales bancarias de la provincia de Sancti-Spíritus. Para esto se implementa el hardware de la nueva solución electrónica, concibiendo la supervisión constante e instantánea de los posibles eventos detectados paralelamente al desarrollo de acciones de telecontrol, basadas principalmente en las ventajas que brinda la señalización Dual Tone Multi-Frequency (DTMF), mediante el uso del software Multisim que posibilitó la simulación del sistema. Además, se establece una valoración. de la efectividad de la propuesta. enfocada en las variadas potencialidades y aplicaciones multipropósitos que provee, así como las soluciones que brinda respecto a las necesidades existentes en las instalaciones bancarias de la provincia. La propuesta de Vigía 2 es significativamente más eficiente que su precedente en cuanto a la no existencia, teóricamente, de límite en la distancia de los locales supervisados; la supervisión de un mayor número de eventos y el telecontrol de los mismos; es más económica; cuenta con una autonomía energética de larga duración; presenta protecciones optoelectrónicas ante posibles inducciones de voltajes y por último, con el uso de canales de voz la información recibida es más confiable y eficaz.. 8.
(9) ÍNDICE INTRODUCCIÓN ............................................................................................. 12 CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DE LOS SISTEMAS DE SUPERVISIÓN Y CONTROL DE EVENTOS Y CARACTERIZACIÓN DE LOS ELEMENTOS UTILIZADOS EN LA CONFORMACIÓN DEL NUEVO SISTEMA ELECTRÓNICO ............................................................................................... 19 1.1.. Sistemas de supervisión y control de eventos. Conceptualización. .... 19. 1.2.. Puerto paralelo de una PC. Características. ....................................... 21. 1.3.. Sistema para la supervisión de eventos Vigía 1. Características y. funcionamiento. ............................................................................................. 24 1.4.. Decodificador. Características. ........................................................... 27. 1.5.. Señalización Dual Tone Multi-Frequency (DTMF). Características. ... 29. 1.5.1.. Codificación DTMF. ...................................................................... 30. 1.5.2.. Decodificación DTMF. .................................................................. 31. 1.6.. Optoacoplador. Características. .......................................................... 34. 1.6.1. 1.7.. Funcionamiento de los optoacopladores. ..................................... 34. Multiplexor. Características. ................................................................ 35. 1.7.1.. Tipos de multiplexación. ............................................................... 37. 1.7.2.. Tipos de multiplexores. ................................................................. 38. 1.8.. Demultiplexores. Características. ....................................................... 39. 1.9.. Compuertas buffer. Características. ................................................... 41. 1.10. Circuitos multivibradores. Características. .......................................... 42 1.10.1. Multivibrador astable. ................................................................... 42. 9.
(10) 1.10.2. Multivibrador biestable. ................................................................. 44 1.10.3. Multivibrador monoestable. .......................................................... 44 1.11. Contadores. Características. ............................................................... 45 1.11.1. Tipos de contadores. .................................................................... 46 CAPÍTULO. 2.. IMPLEMENTACIÓN. DEL. HARDWARE. DEL. SISTEMA. ELECTRÓNICO VIGÍA 2 PARA LA SUPERVISIÓN Y CONTROL DE EVENTOS POR PUERTO PARALELO ........................................................... 48 1.1.. Introducción. ....................................................................................... 48. 1.2.. Diagrama en bloques del sistema electrónico Vigía 2 para realizar la. supervisión de eventos. Explicación funcional de cada una de sus partes. .. 48 2.2. Diagrama en bloques del sistema electrónico Vigía 2 para realizar el control de eventos. Explicación funcional de cada una de sus partes. ......... 56 2.3. Características circuitales del sistema Vigía 2 basadas en la simulación de la interfaz con el software Multisim. ......................................................... 59 2.3.1. Características circuitales más significativas de la nueva interfaz electrónica para desarrollar la supervisión de eventos. ............................. 60 2.3.2. Características circuitales más significativas de la nueva interfaz electrónica para desarrollar el control de eventos. ..................................... 63 2.3.3. Características eléctricas de la interfaz electrónica Vigía 2. Fuentes de alimentación utilizadas. ......................................................................... 64 2.4. Cantidad de circuitos integrados utilizados en la conformacón de la interfaz electrónica Vigía 2. ........................................................................... 66 CAPÍTULO 3. VALORACIÓN DE LA EFECTIVIDAD DEL NUEVO SISTEMA ELECTRÓNICO VIGÍA 2 PARA LA SUPERVISIÓN Y CONTROL DE EVENTOS POR PUERTO PARALELO ........................................................... 69 3.1.. Características potenciales de la interfaz Vigía 2. .............................. 69 10.
(11) 3.1.1.. Aplicaciones potenciales del sistema Vigía 2 fundamentadas en el. empleo de la señalización DTMF. .............................................................. 70 3.2. Soluciones que ofrece Vigía 2 ante las insuficiencias presentadas por Vigía 1. .......................................................................................................... 72 3.3.. Alternativa a considerar para el futuro diseño de una versión más. avanzada del sistema Vigía 2. ...................................................................... 73 CONCLUSIONES ............................................................................................ 75 RECOMENDACIONES .................................................................................... 76 REFERENCIAS BIBLIOGRÁFICAS ................................................................. 77 OTRAS FUENTES CONSULTADAS ............................................................... 79 ANEXOS .......................................................................................................... 80. 11.
(12) INTRODUCCIÓN Las exigencias que actualmente se imponen a los procesos productivos en cuestión de rendimiento, calidad y flexibilidad hacen necesario introducir las tecnologías en el control y vigilancia de estos. Con este propósito nace la idea de supervisar los procesos. La incorporación de las tecnologías en la industria permite la reducción del número de paradas innecesarias, la predicción de situaciones anómalas o la actuación rápida y eficaz de manera que se asegure la continuidad y uniformidad de la producción. Así, la supervisión de procesos se establece como una forma de automatizar tareas como las descritas en las guías de aseguramiento de la calidad y/o en los planes de mantenimiento preventivo, con el fin de eliminar o reducir situaciones indeseadas. De hecho, se puede afirmar que la supervisión está presente en cualquier proceso productivo y que se realiza a través de encargados y operarios especializados, que detectan la presencia de comportamientos anómalos y actúan en consecuencia. La automatización se establece como forma de ordenación a partir de la secuenciación automática de tareas y regulación de variables para que sigan las consignas impuestas. El objetivo de la supervisión es asegurar este orden, aun cuando haya desviaciones no previstas en la automatización. Por este motivo se establece la supervisión en un nivel jerárquicamente superior a la automatización y con una tarea clara de vigilancia. El principal fin de la supervisión en las industrias es el de asegurar la calidad y homogeneidad del producto, garantizando el adecuado funcionamiento del proceso, incluso en presencia de situaciones anormales. Se trata de dar al operador o encargado de control el máximo soporte, liberándolo de la tensión que supone una vigilancia constante y de las tareas rutinarias. Los sistemas de supervisión reducen el costo de aprendizaje del personal de planta. Los interfaces gráficos facilitan tanto una comprensión rápida del proceso, como la localización e identificación rápida del dispositivo o partes del proceso, por asociación gráfica y geográfica entre la representación y el proceso real. Se garantiza una interacción simple a través de pantallas táctiles 12.
(13) y cursores, manejables de forma intuitiva; además, dichos sistemas permiten una rápida acomodación del personal, conservando la uniformidad de decisión y disminuyendo los inconvenientes producidos por situaciones eventuales como vacaciones, bajas y cambios de turnos. En la industria actual han proliferado los llamados sistemas SCADA (del inglés Supervisory Control and Data Acquisition), como sistemas de supervisión. Dichos sistemas se atribuyen las funcionalidades de centralización y adquisición de datos, control y supervisión, por tanto, representan el estado actual de esta disciplina en los entornos industriales. Un SCADA es una aplicación o conjunto de aplicaciones software con acceso a planta, mediante comunicación digital con los instrumentos y actuadores, e interfaz gráfica de alto nivel con el usuario. Sin embargo, la mayoría de ellos aunque cumplen perfectamente con las tareas de adquisición de datos y control, distan de ser entornos de supervisión expertos; es decir, la integración de conocimiento experto y su utilización en tareas de decisión, queda reducida a su característica de sistema abierto. De hecho, el rol supervisor de los SCADA actuales está relegado básicamente a la activación y registro de alarmas, asociadas al traspaso de umbrales por parte de variables analógicas. Aunque las alarmas pueden considerarse una forma simple de detección de fallos, quedan por cubrir otras tareas de supervisión como son el diagnóstico y la propuesta de acciones para la reconfiguración del sistema, en caso de ser necesario.[1] En el mundo moderno también es común el uso de autómatas programables (PLC) para llevar a cabo la supervisión y control de procesos, garantizando una gran resistencia ante condiciones severas de trabajo, como son el calor, el frío, el polvo, la humedad extrema; con un lenguaje de programación de fácil entendimiento, por lo que se pueden programar sin mucha dificultad y permiten añadirles módulos si fuese necesario; pero sin embargo implica una elevada inversión económica. Diversos sectores utilizan esta tecnología, entre ellos se encuentran las industrias con las plantas de manufactura y fábricas de plástico, así como las. 13.
(14) industrias de la impresión, de alimentos y textil, con el control del sistema de impresión, de máquinas de llenado y del sistema de lavadoras industriales respectivamente; los aeropuertos y estaciones en el funcionamiento de escaleras mecánicas y la elevación de ascensores; los hospitales con el sistema de control para refrigeración de calderas; la agricultura con el control del sistema de calefacción, ventilación y riego de invernaderos; entre muchos otros.[2] Cuba no se ha quedado atrás en el uso de esta novedosa técnica para el control de procesos industriales, y ha tenido que hacer grandes gastos al invertir en estos equipos de altos costos en moneda libremente convertible, la mayoría importados; a excepción del Nova, un autómata programable que recientemente fue diseñado y ensamblado completamente en nuestro país junto con sus varias versiones, y ha sido probado con éxito en diversas industrias[3]. Como ejemplo de empresas que han instalado una considerable cantidad de autómatas programables en Cuba está la Empresa de Telecomunicaciones de Cuba, Sociedad Anónima (ETECSA), donde se implementó un proyecto a nivel nacional desde el año 2003, instalando 400 autómatas OMRON; el costo total de la inversión fue de 1,4 millones de dólares, donde el valor de cada autómata fue de 3500 dólares al igual que el hardware de cada PLC, y el software requirió de una inversión a parte. El total de eventos supervisados por cada PLC en esta inversión era de 48 (un módulo de entrada de 16 eventos y otro de 32). También las industrias azucarera y alimenticia cubanas han sido beneficiadas con esta tecnología, como es el caso del Central Azucarero Melanio Hernández y la Empresa Combinada de Productos Lácteos, ambos de la provincia de Sancti-Spíritus. Una de las potencialidades de los autómatas programables es que supervisan y controlan eventos de cualquier índole, pudiendo ser utilizados en el ámbito de la seguridad y protección de los bienes y recursos de las instituciones como otra de sus aplicaciones, para detectar que se ha producido algún. 14.
(15) acontecimiento que pudiese quebrar la seguridad de la entidad y actuar al respecto. Sin embargo, por su alto costo, las empresas cubanas tienden a emplear otras soluciones para este fin, como los sistemas de alarmas, absteniéndose en muchas ocasiones a la posibilidad de controlar los eventos y limitándose solo a la supervisión. En los Lineamientos de la Política Económica y Social del Partido y la Revolución Cubana para el período 2016-2021, específicamente en el número 108 referente a la política de ciencia, tecnología, innovación y medio ambiente, se plantea avanzar gradualmente, según lo permitan las posibilidades económicas, en el proceso de informatización de la sociedad, el desarrollo de la infraestructura de telecomunicaciones y la industria de aplicaciones y servicios informáticos[4]. Es por ello que, con el fin de hacer más eficaz y confiable la protección de sus bienes y recursos materiales, y adaptándose a su situación económica, las instituciones bancarias del país cuentan con los sistemas de seguridad conformados por los Sistemas de Alarma Contra Intrusos (SACI) y con los Circuitos Cerrados de Televisión (CCTV), los cuales trabajan actualmente sin poder ser supervisados en tiempo real por la dirección provincial del Banco Popular de Ahorro (BPA). Por esta razón bajo condiciones de ocurrencia de algún hecho delictivo es necesario fortalecer la supervisión de eventos incluso si ocurrieran interrupciones propias de estas tecnologías, que tampoco son supervisadas directamente desde el punto de dirección provincial. Otra limitante tecnológica consiste en el posible corte, ya sea intencional o no, de las líneas telefónicas y de datos en el horario no laboral, las que constituyen vulnerabilidades adicionales que afectan la seguridad y protección de estas instalaciones.. Estas vulnerabilidades deben. ser supervisadas también. constantemente para poder detectar oportunamente la pérdida de cualquiera de los enlaces de comunicaciones, que conducen las señales de alarma hacia el punto de monitoreo centralizado. La provincia de Sancti Spíritus posee 13 sucursales bancarias dispersas en sus ocho municipios y no está ajena a esta problemática, por lo que ha ido. 15.
(16) perfeccionando gradualmente sus sistemas de seguridad; es por ello que actualmente cuenta con un sistema computarizado de supervisión de eventos por puerto paralelo denominado Vigía 1. Es importante aclarar que la decisión técnica de emplear este puerto fue acertada, teniendo en cuenta que la totalidad de las computadoras que posee el sistema bancario del país, incluidas las más modernas de cuarta generación, tienen disponible dicho puerto. Vigía 1 supervisa hasta cinco eventos ON/OFF, y es capaz de captar y enviar los eventos detectados a través de la red de datos que poseen los bancos en cada. provincia, prácticamente en tiempo real, hacia un ordenador central. ubicado en el punto de dirección provincial, donde se analizan las señales que son enviadas desde cada computadora que tenga configurado este sistema, y se toman decisiones oportunas según sea el caso. No obstante, es preciso aclarar que los eventos que potencialmente son supervisados por este sistema, pueden ser procesos industriales que precisen ser controlados continuamente, lo cual se efectúa en la práctica mediante el empleo de autómatas que, como se dijo anteriormente, es necesario importar con costos de consideración, por lo que soluciones de este tipo cumplen con la política del Partido Comunista de Cuba (PCC) de lograr disminuir las importaciones ajustándose a las condiciones económicas del país, y en este caso la computadora. que se emplee con este fin puede ser utilizada de. manera simultánea para cumplir otras funciones. Este sistema ha demostrado ser eficaz para la supervisión de eventos locales, sin embargo, al hacer un estudio detallado sobre su funcionamiento en todas las sucursales bancarias de Sancti-Spíritus donde se halla instalado, se pudo apreciar que ha confrontado dificultades en el envío de los eventos captados a través de las redes de datos de las instalaciones bancarias. Por otro lado, también los fallos en los sistemas energéticos del país afectan de manera considerable el funcionamiento estable de Vigía 1, al no existir una autonomía energética alternativa, que mantenga las computadoras encendidas durante las horas que falte el fluido eléctrico; y queda por mencionar que permite supervisar solamente cinco eventos de carácter local, con distancias de. 16.
(17) cableado limitadas, y sin protecciones ante inducciones de voltajes que puedan afectar el puerto paralelo, tampoco se previó la posibilidad de gestionar los diferentes procesos supervisados. Estas limitaciones que han sido descritas conducen a diseñar e implementar un nuevo sistema que facilite una mayor gama de aplicaciones, de manera que, además de permitir la supervisión de un considerable número de eventos cuando se ejecuta la lectura de datos a través del puerto paralelo, pueda también ejecutar acciones de control oportunas de escritura de datos a través de dicho puerto, permitiendo controlar los procesos que se deseen supervisar. A partir de estos antecedentes se convierte en propósito esencial de esta investigación la solución del siguiente problema científico: ¿Cómo lograr una supervisión y control de eventos por puerto paralelo más eficiente y con una mayor cantidad de aplicaciones que las que brinda el implementado Vigía 1? Para dar respuesta a esta interrogante se plantea como objetivo general el siguiente: Diseñar un nuevo sistema electrónico para la supervisión y control de eventos por puerto paralelo, a través de una interfaz electrónica flexible. En consecuencia, se trazan como objetivos específicos los siguientes: 1. Fundamentar teóricamente la utilización de los sistemas de supervisión y control de eventos, así como los elementos empleados en la conformación del nuevo sistema electrónico. 2. Implementar el hardware de la nueva solución electrónica para la supervisión y control de eventos por puerto paralelo, empleando el software Multisim para la simulación de la interfaz. 3. Valorar la efectividad del nuevo sistema para la supervisión y control de eventos con una PC. Descripción de los contenidos. 17.
(18) La. tesis se estructura. recomendaciones,. en. referencias. introducción, bibliográficas,. tres capítulos, bibliografía. conclusiones,. y. anexos.. La. introducción contiene el tema de investigación, la situación problémica, el problema a resolver, así como el objetivo general y los específicos. En el capítulo 1 se fundamenta teóricamente la utilización de los sistemas de supervisión y control de eventos, se hace una descripción del sistema Vigía 1 y se explica su funcionamiento, también se desarrolla una caracterización del puerto paralelo y los elementos electrónicos utilizados en la conformación del nuevo sistema que se requiere implementar; además de una explicación sobre todo lo relacionado con la señalización Dual Tone Multi-Frequency (DTMF). En el capítulo 2 se hace una caracterización detallada de la interfaz electrónica que se va a desarrollar para supervisar y controlar eventos con una PC, en cuanto a su formación estructural basada en diagramas en bloques, los esquemas circuitales que conforman el nuevo sistema fundamentados en su simulación con el software Multisim, y la explicación del funcionamiento real de cada una de sus partes y componentes. En el capítulo 3 se exponen los resultados del diseño del sistema electrónico para la supervisión y control de eventos por puerto paralelo, haciendo énfasis en las soluciones que brinda respecto a las necesidades existentes en las instalaciones bancarias de Sancti Spíritus y las variadas potencialidades y aplicaciones que provee este sistema.. 18.
(19) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS DE LOS SISTEMAS DE. SUPERVISIÓN. Y. CONTROL. DE. EVENTOS. Y. CARACTERIZACIÓN DE LOS ELEMENTOS UTILIZADOS EN LA CONFORMACIÓN DEL NUEVO SISTEMA ELECTRÓNICO 1.1. Sistemas de supervisión y control de eventos. Conceptualización. Un sistema se define como un conjunto de elementos interrelacionados capaces de realizar una operación dada o de satisfacer una función deseada[5]. Existen diversos tipos de sistemas, pero este proyecto se enfocará en los sistemas de supervisión y control. La supervisión es el hecho de controlar a distancia los procesos industriales, de forma remota y computarizada. Un usuario o una máquina controlan los diferentes procesos que se dan en una fábrica. La principal función de la supervisión es la centralización del control de procesos fuera del área de control o fuera de la máquina a controlar; en ella actúan tanto las personas como las máquinas. De esta separación del control hombre-máquina podemos ver las dos formas principales de la supervisión: la supervisión activa o control manual, donde el hombre a través de una pantalla simulador controla los procesos que se están realizando en mayor o menor grado; y la supervisión pasiva o automática, es decir, la PC a través de su aplicación controla las variables del sistema y solo avisa a la persona cuando encuentra un error[6]. La supervisión proporciona información que puede ser útil para: . Analizar la situación del proyecto.. . Determinar si las aportaciones al proyecto se utilizan bien.. . Identificar los problemas a los que se enfrenta el proyecto y encontrar soluciones.. . Asegurarse de que todas las actividades se llevan a cabo convenientemente.. . Usar las experiencias de un proyecto en otro.. 19.
(20) . Determinar si la forma en la que se ha planificado el proyecto es la manera óptima de solucionar el problema existente[7].. Por otra parte, el control es la técnica de medir o detectar una condición o situación, compararla con el valor que de ella se desea tener, y actuar en correspondencia a fin de reducir la diferencia entre ambas. Esta definición, amplia de por sí, es aplicable a infinidad de cosas que el hombre hace, o dice hacer; desde el control de tránsito, de natalidad, de contaminación, de la evasión de impuestos, hasta el inventario y calidad de productos elaborados, son condiciones o situaciones que a algunos humanos les toca controlar[8]. Un proceso o sistema de control es un conjunto de elementos interrelacionados capaces de realizar una operación dada o de satisfacer una función deseada. En Automática se sustituye la presencia del ser humano por un mecanismo, circuito eléctrico, circuito electrónico o, más modernamente, por un ordenador; el sistema de control será en este caso automático. Un sistema automático de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan su actuación por sí mismos, es decir, sin intervención de agentes exteriores (incluido el factor humano), corrigiendo además los posibles errores que se presenten en su funcionamiento. Actualmente, cualquier mecanismo, sistema o planta industrial presenta una parte actuadora, que corresponde al sistema físico que realiza la acción, y otra parte de mando o control, que genera las órdenes necesarias para que esa acción se lleve o no a cabo. En la actualidad los sistemas automáticos juegan un gran papel en muchos campos, mejorando la calidad de vida: En los procesos industriales: - Aumentando las cantidades y mejorando la calidad del producto, gracias a la producción en serie y a las cadenas de montaje.. 20.
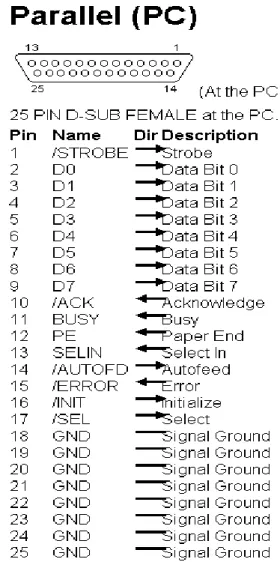
(21) - Reduciendo los costes de producción. - Fabricando artículos que no se pueden obtener por otros medios. En los hogares: - Mejorando la calidad de vida: Se podría citar desde una lavadora hasta un control inteligente de edificios (domótica). - Para los avances científicos: Un claro ejemplo lo constituyen las misiones espaciales. Para los avances tecnológicos: Por ejemplo, en automoción es por todos conocidos los limpiaparabrisas inteligentes, etc. Como se puede observar, las aplicaciones son innumerables. De esta manera surge toda una teoría, La Regulación Automática, dedicada al estudio de los sistemas automáticos de control. Los sistemas de control se pueden clasificar en: Sistemas de bucle o lazo abierto: son aquellos en los que la acción de control es independiente de la salida. Sistemas de bucle o lazo cerrado: son aquellos en los que la acción de control depende en cierto modo de la salida[5]. 1.2. Puerto paralelo de una PC. Características. Comúnmente denominado puerto de impresora o puerto Centronix, este conector permite la entrada y salida, desde una computadora, de señales que se pueden emplear para muchas más cosas que simplemente imprimir sobre un papel. El puerto paralelo de una PC es ideal para ser usado como herramienta de control de motores, relays, LED's (Light Emisor Diode), entre otras diversos dispositivos. El mismo posee un bus de datos bidireccional de 8 bits (Pines del 2 al 9) que cumplen con el estándar de salida TTL, además de nueve señales, de las cuales cuatro son de entrada/salida (pines 1, 14, 16 y 17) y constituyen. 21.
(22) el bus de control, y las restantes cinco son de entrada (bus de estado), que también pueden ser usadas potencialmente para otras aplicaciones. Las PC's generalmente poseen solo uno de estos puertos (LPT1), pero con muy poco dinero se le puede adicionar una tarjeta con un segundo puerto paralelo (LPT2). En reglas generales la dirección hexadecimal del puerto LPT1 es igual a 0x378 (888 en decimal) y 0x278 (632 en decimal) para el LPT2. Esto se puede verificar fácilmente en el setup de la PC o bien en el cartel que generalmente la PC muestra en el momento del booteo. Dicho puerto posee un conector de salida del tipo DB25 hembra, cuyo diagrama y señales utilizadas se pueden ver en la figura 1.1, donde se describen más detalladamente las señales del bus de datos, bus de estado y bus de control que se integran en este conector.. Figura 1.1 Puerto paralelo de la PC (DB25 hembra).. 22.
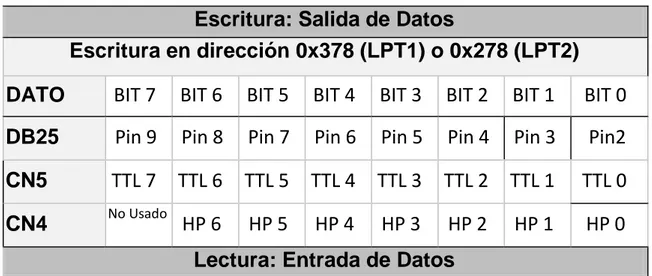
(23) Si se requiere escribir un dato en el bus de salida de datos, solo se debe escribir el byte correspondiente en la dirección hexadecimal 0X378 (888 en decimal) cuando se trabaja con el LPT1 y 0x278 (632 en decimal) cuando se trabaja con el LPT2. Los distintos pines (bits) de salida correspondientes al bus de datos no pueden ser escritos en forma independiente, por lo que siempre que se desee modificar uno se deberán escribir los ocho bits nuevamente. Los pines relacionados al bus de control son 1, 14, 16 y 17, donde al pin 1 le corresponde el bit menos significativo, al 16 el segundo menos significativo, al pin 17 el tercero y finalmente al 14 se le asocia el bit más significativo. El bus de estado es empleado para ingresar datos hacia la computadora desde el mundo exterior, permitiendo, por ejemplo, que un programa decida las acciones a tomar en función de los datos que por aquí se ingresen. Este puerto, a diferencia del de datos, dispone solo de cinco líneas de datos de entrada. Para leer el estado de los pines de entrada (10, 11, 12, 13 y 15) se debe realizar una lectura a la dirección hexadecimal 0x379 (889 en decimal) si se trabaja con el LPT1, o bien leer la dirección 0x279 (633 en decimal) si se trabaja con el LPT2. La lectura será devuelta en un byte, en donde el bit 7 corresponde al pin 11, el bit 6 al pin 10, el bit 5 al 12, el bit 4 al 13 y el bit 3 al pin 15. En la siguiente tabla se puede ver lo antes dicho en una forma gráfica: Tabla 1.1 Resumen sobre la escritura y lectura de datos en los puertos LPT1 y LPT2. Escritura: Salida de Datos Escritura en dirección 0x378 (LPT1) o 0x278 (LPT2) DATO. BIT 7. BIT 6. BIT 5. BIT 4. BIT 3. BIT 2. BIT 1. BIT 0. DB25. Pin 9. Pin 8. Pin 7. Pin 6. Pin 5. Pin 4. Pin 3. Pin2. CN5. TTL 7. TTL 6. TTL 5. TTL 4. TTL 3. TTL 2. TTL 1. TTL 0. HP 6. HP 5. HP 4. HP 3. HP 2. HP 1. HP 0. CN4. No Usado. Lectura: Entrada de Datos 23.
(24) Lectura en dirección 0x379 (LPT1) o 0x279 (LPT2) BIT 6. BIT 5. BIT 4. BIT 3. BIT 2. BIT 1 BIT 0. En DB25 Pin 11 Pin 10. Pin 12. Pin 13. Pin 15. No usar. No usar. No usar. No Usado. No Usado. No Usado. DATO. CN6. BIT 7. No Usado. Input 3 Input 2 Input 1 Input 0. [9] 1.3. Sistema para la supervisión de eventos Vigía 1. Características y funcionamiento. Esta solución tecnológica está basada en lograr una instalación sencilla de cinco lazos de control, definiendo los cinco pines del bus de estado del puerto paralelo que son usados, y la forma de identificar estos pines en el cable que se usa tradicionalmente para la conexión con la impresora matricial. La figura 1.1 mostrada anteriormente ilustra el orden en que se cuentan los 25 pines de derecha a izquierda del conector hembra ubicado en la PC, de ellos solo son utilizados. para esta aplicación los pines. 10,11,12,13,y 15, para. conectarse con el mundo exterior del ordenador, con el objetivo de lograr supervisar las señales eléctricas que se reciban por estos cinco pines del puerto paralelo, las cuales se corresponderán con niveles bajos de voltaje (L) o nivel de cero lógico, si se mantienen los cinco lazos de corriente cerrados por los interruptores existentes entre los pines 10, 11, 12, 13, 15 y el pin 25 ( este pin tiene siempre un potencial fijo de cero lógico ), como se puede observar en la figura referente. En los casos en que algunos de los cinco contactos no permanezcan cerrados, serán interpretados estos cambios de nivel de voltaje en cada una de las cinco entradas del puerto paralelo que esto suceda, como un nivel alto (H) o uno lógico, siendo contabilizado, clasificado y registrado, por el programa correspondiente, la ocurrencia de cada uno de los cinco eventos de apertura de lazo que se generen, durante todo el tiempo en que se esté efectuando la supervisión de la posible ocurrencia de los eventos de apertura y cierre de estos lazos, lo cual puede ser en determinados horarios de cada día o en un. 24.
(25) régimen continuo de 24 horas, en correspondencia con los procesos que estén siendo supervisados por esta aplicación. Hay que tener en cuenta que en el conector de 25 pines macho que posee el cable de enlace que normalmente se conecta con la impresora, estos pines se cuentan de izquierda a derecha ya que es la manera en que el pin 1 macho del cable podrá coincidir con el pin 1 hembra de la PC. En este cable se deja el conector que permite el enlace con la PC, y se cortan los hilos del conector que va a la impresora procediendo entonces a identificar con un multímetro, mediante pruebas sencillas de continuidad cada uno de los hilos que están conectados a los pines 10, 11, 12, 13,15 y 25 de este conector macho. El esquema de la figura 1.2 muestra como los cinco lazos de supervisión se conectan de una forma muy sencilla, pues solo hay que organizarlos de manera que la señal de tierra con nivel de cero lógico existente en el pin 25, deberá conformar cinco lazos de supervisión al salir desde el puerto paralelo y retornar por cada uno de los cinco hilos de lectura (10,11,12,13,y 15 ) del cable de la impresora, los cuales serán conducidos y conectados para cerrar cada lazo a través del interruptor correspondiente, que está ubicado en cada lugar donde se necesite supervisar el evento deseado, y se cerrará el lazo correspondiente pasando a través del contacto cerrado que puede ser de un sensor magnético, un contacto cerrado de un relay o un sensor de movimiento, y deberá retornar por otro hilo que irá conectado en cada caso al pin 25, de una manera independiente para cada uno de los cinco pines enumerados anteriormente.. Figura 1.2 Esquema de conexiones de los lazos de supervisión para el sistema Vigía 1.. 25.
(26) Para el caso de Vigía 1, uno de los cinco enlaces en esta aplicación deberá ser conducido hasta la central de alarma que exista en la entidad supervisada, y específicamente se deberá utilizar un relay de 12 volts, de manera que sus dos contactos normalmente cerrados se conectarán a los dos hilos que van hacia el puerto de la PC, y las dos conexiones correspondientes a la bobina del relay se conectarán a los conectores de tornillos identificados como +Bell y – Bell, que es donde se conecta la sirena en todos los sistemas de alarmas instalados en el mundo empresarial. Para este caso, de manera más sencilla, solo se tienen que extender e interconectar estos dos hilos de la bobina del relay hasta donde esté la sirena, y conectarlos entonces directamente en paralelo con los dos cables de esta. De esta forma el lazo se abre siempre que se active la sirena, lo que hace que el relay opere en paralelo con la señal de activación de la misma, y este constituye el evento más importante a supervisar por el sistema Vigía 1, desarrollado específicamente para el régimen bancario. Donde no exista central de alarma podrá ser empleado este sistema con cinco sensores magnéticos, como una central de alarma, logrando controlar cinco zonas independientes de manera autónoma y eficaz, y también podrían ser utilizados sensores de movimiento si fuera requerido. Como fue mencionado anteriormente este sistema ha confrontado dificultades en el envío de los eventos captados a través de las redes de datos de las instalaciones bancarias, motivadas fundamentalmente por la carencia. de. prioridad en la conducción de la información que genera Vigía 1, pues como es lógico, estas redes están concebidas para priorizar los datos y estadísticas financieras y contables que se manejan entre los servidores de datos existentes en todas las sucursales bancarias del país. Por otra parte, los fallos en el sistema energético afectan de manera considerable el funcionamiento estable de Vigía 1, al no lograrse una autonomía energética de varias horas si fuese necesario, lo cual es causado por el alto consumo eléctrico de las computadoras, debido a que las fuentes de respaldo (Back-Ups), garantizan energía suficiente solo por un período máximo. 26.
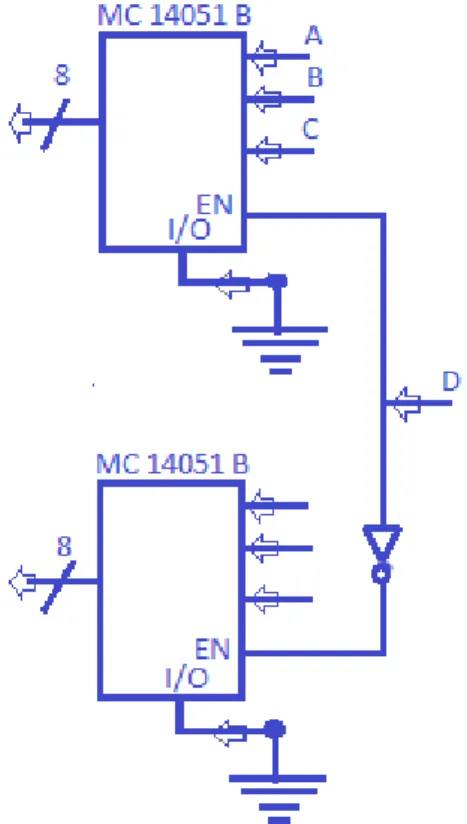
(27) de 30 minutos aproximadamente, y al agotarse las baterías el sistema queda totalmente interrumpido. Finalmente queda por mencionar que Vigía 1 permite supervisar solamente cinco eventos de carácter local, con distancias de cableado limitadas, y sin protecciones ante inducciones de voltajes que puedan afectar el puerto paralelo, tampoco se previó la posibilidad de controlar los diferentes procesos supervisados. Todas estas limitantes conllevaron a la búsqueda de una nueva solución que supliera las necesidades inminentes en las instalaciones bancarias de Sancti-Spíritus. 1.4. Decodificador. Características. Discretas cantidades de información son representadas en sistemas digitales por códigos binarios. Un código binario de n bits es capaz de representar hasta 2n elementos distintos de información codificada. El decodificador es un circuito combinacional que convierte la información binaria de n líneas de entrada a un máximo de 2n líneas únicas de salida[10], o sea, convierte números binarios en sus equivalentes octales (base 8), decimales (base 10) y hexadecimales[11]. En un sistema digital, como puede ser una PC, se pueden transmitir tanto instrucciones como números, mediante niveles binarios o trenes de impulsos. Si, por ejemplo, los 4 bits de un mensaje se disponen para transmitir órdenes, se pueden lograr 16 instrucciones diferentes, esto es lo que se conoce como información codificada en sistema binario. Otras veces es de interés que un conmutador de varias posiciones pueda funcionar de acuerdo con este código, es decir, para cada uno de los 16 códigos debe ser excitada una sola línea. A este proceso de identificación de un código particular se le denomina decodificación. Se pueden distinguir dos tipos básicos de decodificadores: los no excitadores y los excitadores. Para entender el primero de los tipos se presenta el ejemplo de un decodificador de dos entradas, este hará corresponder, a cada una de las cuatro palabras posibles de formar con las dos entradas, una de las salidas. La. 27.
(28) salida Y0, será 1 cuando los bits de entrada A y B son 0. Luego, la expresión booleana que le corresponde es: Y0 = /A * /B. El mismo razonamiento se puede repetir para el resto de salidas. En muchas aplicaciones es deseable que la decodificación se realice únicamente durante intervalos de tiempo específicos, de forma que sean rechazados los datos de entrada que no aparezcan durante esos intervalos. Esto se consigue añadiendo una entrada denominada strobe o enable. Cuando esta señal es 1, se ejecuta la decodificación y cuando es 0 se inhibe la decodificación. Dependiendo de que el decodificador rechace o no los datos falsos, el modo de utilizar la señal de strobe debe ser distinto[12]. La siguiente figura muestra un ejemplo de decodificador de 4-16 líneas no excitador empleando dos circuitos integrados MC14051B:. Figura 1.3 Decodificador de 4-16 líneas empleando dos circuitos integrados MC14051B.. En el segundo de los casos están, por ejemplo, aquellos cuya misión es convertir el código BCD de sus entradas al formato de salida necesario para excitar un visualizador numérico o alfanumérico, uno de los más utilizados en la electrónica digital es el llamado decodificador excitador BCD - 7 segmentos[12]. 28.
(29) 1.5. Señalización Dual Tone Multi-Frequency (DTMF). Características. Una señal DTMF válida es la suma de dos tonos, uno de un grupo bajo y el otro de un grupo alto, con cada grupo conteniendo cuatro tonos individuales. Las frecuencias de los tonos fueron cuidadosamente seleccionadas de tal forma que sus armónicos no se encuentren relacionados y que los productos de su intermodulación produzcan un deterioro mínimo en la señalización. Este esquema permite 16 combinaciones únicas; 10 de estos códigos representan los números del cero al nueve, los seis restantes (*, #, A, B, C, D) son reservados para señalización especial. La mayoría de los teclados en los teléfonos contienen 10 interruptores de presión numéricos, más el asterisco (*) y el símbolo de numeral (#). Los interruptores se encuentran organizados en una matriz y cada uno selecciona el tono del grupo bajo de su fila respectiva y el tono del grupo alto de su columna correspondiente. El esquema de codificación DTMF asegura que cada señal contiene uno y solo un componente de cada uno de los grupos de tonos altos y bajos. Esto simplifica de manera significativa la decodificación, porque la señal compuesta DTMF puede ser separada con filtros pasa banda en sus dos componentes de frecuencia simples, cada uno de los cuales puede ser manipulado de forma individual. Las teclas de función A, B, C y D, son extensiones de las teclas 0-9, * y #, y fueron diseñadas con los teléfonos militares norteamericanos Autovon. Los nombres originales de estas teclas fueron FO (Flash Override), F (Flash), I (Inmediate) y P (Priority), los cuales representaban niveles de prioridad y que podían establecer comunicación telefónica con varios grados de prioridad, eliminando otras conversaciones en la red si era necesario con la función FO, siendo la de mayor prioridad hasta P, la de menor prioridad. Estos tonos son más comúnmente referidos como A, B, C y D respectivamente, todos ellos tienen en común 1633 Hz como su tono alto. Actualmente estas teclas de función son empleadas principalmente en aplicaciones especiales, tales como, los repetidores de radioaficionados para sus protocolos de comunicación, los modems y circuitos de tonos al tacto. 29.
(30) (touch tone), también tienen tendencia a incluir los pares de tonos A, B, C, y D. Estas no han sido usadas para el servicio público en general, y podría tomar años antes de que pudiesen ser incluidas en aplicaciones como, por ejemplo, las líneas de información al cliente[13]. 1.5.1. Codificación DTMF. El esquema de marcado DTMF fue diseñado por los laboratorios BELL e introducido a los Estados Unidos a mediados de los años 60, como una alternativa para la marcación por pulsos o rotatoria; ofreciendo incremento en la velocidad de marcado y mejorando la fiabilidad y la conveniencia de señalización de punto a punto. Muchas aplicaciones en las telecomunicaciones requieren de transmisión de señales DTMF para el envío de datos y marcado. El estándar DTMF fue diseñado originalmente para su uso en los sistemas telefónicos de AT&T. Existen varias especificaciones que han sido resultado del estándar original, las cuales parten de los estándares de AT&T, CEPT, NTT, CCITT y la ITU, entre otros. Las variaciones de un estándar a otro son típicamente tolerancias en las desviaciones de frecuencia, niveles de energía, diferencia de atenuación entre dos tonos e inmunidad al habla. Los estándares CCITT se encuentran localizados en las recomendaciones Q.23 y Q.24 en la sección 4.3 del libro rojo de la CCITT, volumen VI, fascículo VI.1. En conclusión, DTMF es el sistema de señales usado en los teléfonos para el marcado por tonos; estos son el resultado de la suma algebraica en tiempo real de dos senoides de diferentes frecuencias. La relación de teclas con su correspondiente par de frecuencias se muestra en la tabla 1.2. Tabla. 1.2. Pares. Frecuencia baja. de. frecuencias. empleadas. Frecuencia alta. 30. para. la. Dígito. generación. DTMF..
(31) 697. 1209. 0001-1. 697. 1336. 0010-2. 697. 1477. 0011-3. 770. 1209. 0100-4. 770. 1336. 0101-5. 770. 1477. 0110-6. 852. 1209. 0111-7. 852. 1336. 1000-8. 852. 1477. 1001-9. 941. 1336. 1010-0. 941. 1209. 1011-*. 941. 1477. 1100-#. 697. 1633. 1101-A. 770. 1633. 1110-B. 852. 1633. 1111-C. 941. 1633. 0000-D. Las señales DTMF son generadas por un codificador, y son la suma algebraica en tiempo real de dos tonos (uno de baja frecuencia y otro de alta). El tono alto normalmente es de + 1.5 % (2db) con respecto al tono bajo, para compensar pérdidas de señal en las largas líneas de conexión con la central telefónica[13]. 1.5.2. Decodificación DTMF. Las especificaciones ITU Q.24 para la detección DTMF son las siguientes: 31.
(32) . Tolerancia a la frecuencia: un símbolo válido DTMF debe tener una. desviación en frecuencia dentro del 1.5% de tolerancia. Los símbolos con una desviación en frecuencia mayor al 3.5% deberán ser rechazados. . Duración de la señal: Un símbolo DTMF con una duración de 40ms debe. ser considerado válido. La duración de la señal no debe ser menor de 23ms. . Atenuación de la señal: El detector debe trabajar con una relación señal-. ruido (SNR) de 15db y en el peor caso con una atenuación de 26dB. . Interrupción de la señal: Una señal DTMF válida interrumpida por 10ms. o menos no debe ser detectada como dos símbolos distintos. . Pausa en la señal: Una señal DTMF válida separada por una pausa de. tiempo de al menos 40ms debe ser detectada como dos símbolos distintos. . Fase: El detector debe operar con un máximo de 8dB en fase normal y. 4dB en fase invertida. . Rechazo al habla: El detector debe operar en la presencia del habla. rechazando la voz como un símbolo DTMF válido. La división de frecuencias en los grupos alto y bajo simplifica el diseño de receptores DTMF, como se muestra en la figura 1.4. Este diseño particular incluye una aproximación estándar. Cuando se encuentra conectado a una línea telefónica, receptor de radio o cualquier otra fuente de señal DTMF, el receptor filtra el ruido del tono, separa la señal en los componentes de grupos de alta y baja frecuencia, para luego medir el cruce por cero, promediando los periodos para producir la decodificación de un dígito.. 32.
(33) Figura 1.4 Arquitectura típica de un receptor DTMF.. La detección DTMF se puede ver complicada por la presencia de ruido de línea de 50/60 Hz, tonos de varias frecuencias, ruido aleatorio y otras fuentes de interferencia. Tratar con estos problemas mientras permanece inmune a la simulación de tonos por voz, representa el más grande reto para los diseñadores de receptores DTMF. La interferencia de línea tolerable es la recomendada por CEPT y es considerada la meta de diseño por los fabricantes de receptores DTMF de calidad. El circuito mostrado en la figura 1.5 ilustra el uso de un dispositivo MT8870 en un sistema de recepción típico. Las especificaciones de British Telecom definen las señales de entrada menores de -34 dBm como niveles no operativos[13].. Figura 1.5 Sistema de recepción para la especificación 1151 de British Telecom.[13]. 33.
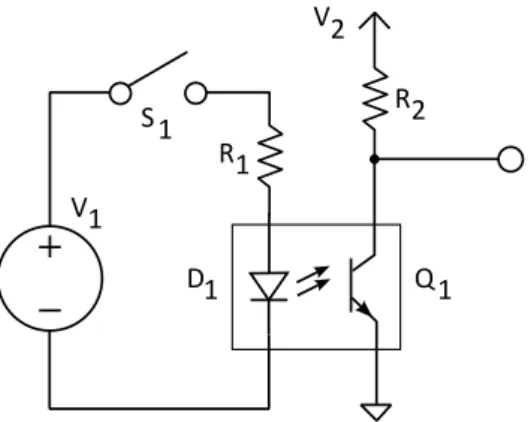
(34) 1.6. Optoacoplador. Características. Un optoacoplador, también llamado optoaislador o aislador acoplado ópticamente, es un dispositivo de emisión y recepción que funciona como un interruptor, activado mediante la luz emitida por un diodo LED que satura un componente optoelectrónico, normalmente en forma de fototransistor o fototriac. De este modo se combinan en un solo dispositivo semiconductor, un fotoemisor y un fotorreceptor, donde la conexión entre ambos es óptica. Estos elementos se encuentran dentro de un encapsulado que por lo general es del tipo DIP. Se suelen utilizar para aislar eléctricamente a dispositivos muy sensibles[14]. 1.6.1. Funcionamiento de los optoacopladores. V2 S1. R2 R1. V1 D1. Q1. Figura 1.6 Optoacoplador 4N35 formado por un LED y un fototransistor.. La figura 1.6 muestra un optoacoplador 4N35 formado por un LED y un fototransistor. La tensión de la fuente y la resistencia en serie establecen una corriente en el LED emisor cuando se cierra el interruptor S1. Si dicha corriente proporciona un nivel de luz adecuado, al incidir sobre el fototransistor lo saturará, generando una corriente en R2. De este modo la tensión de salida será igual a cero con S1 cerrado y a V2 con S1 abierto. Si la tensión de entrada varía, la cantidad de luz también lo hará, lo que significa que la tensión de salida cambia de acuerdo con la tensión de entrada. De este modo el dispositivo puede acoplar una señal de entrada con el circuito de salida, aunque hay que tener en cuenta que las curvas tensión/luz del LED no son lineales, por lo que la señal puede distorsionarse. Se venden. 34.
(35) optoacopladores especiales para este propósito, diseñados de tal forma que tengan un rango en el que la señal de salida sea casi idéntica a la de entrada. Su ventaja fundamental es el aislamiento eléctrico entre los circuitos de entrada y salida. Mediante el optoacoplador, el único contacto entre ambos circuitos es un haz de luz. Esto se traduce en una resistencia de aislamiento entre los dos circuitos del orden de miles de MΩ. Estos aislamientos son útiles en aplicaciones de alta tensión, en las que los potenciales de los dos circuitos pueden diferir en varios miles de voltios[14]. 1.7. Multiplexor. Características. Un multiplexor o selector de datos es un circuito combinacional con varias entradas de datos, un grupo de entradas de control y una salida. Las entradas de control se utilizan para seleccionar una de las entradas de datos y conectarla al terminal de salida[15]. En el campo de la electrónica el multiplexor se utiliza como dispositivo que puede recibir varias entradas y transmitirlas por un medio de transmisión compartido. Para ello lo que hace es dividir el medio de transmisión en múltiples canales, para que varios nodos puedan comunicarse al mismo tiempo (Figura 1.7). Una señal que está multiplexada debe demultiplexarse en el otro extremo[16]. Diseño en Electrónica Digital:. Figura 1.7 Esquema de un multiplexor 2 a 1.Puede compararse con un conmutador analógico[15].. Estos circuitos combinacionales poseen 2n líneas de entrada de datos, una línea de salida y n entradas de selección. Las entradas de selección indican. 35.
(36) cuál de estas líneas de entrada de datos es la que proporciona el valor a la línea de salida. Cada combinación de las entradas de selección corresponde a una entrada de datos, y la salida final del multiplexor corresponderá al valor de dicha entrada seleccionada. Para identificar la entrada de selección más significativa, por convenio esta siempre es la que está más arriba (de mostrarse de forma vertical) o más a la izquierda (de mostrarse de forma horizontal), independientemente de su etiqueta identificatoria, a no ser que se especifique lo contrario. También se pueden construir multiplexores con mayor número de entradas utilizando multiplexores de menos entradas, empleando la composición de multiplexores. En electrónica digital, es usado para el control de un flujo de información que equivale a un conmutador. En su forma más básica se compone de dos entradas de datos (A y B), una salida de datos y una entrada de control. Cuando la entrada de control se pone a 0 lógico, la señal de datos A es conectada a la salida; cuando la entrada de control se pone a 1 lógico, la señal de datos B es la que se conecta a la salida. El multiplexor es una aplicación particular de los decodificadores, tal que existe una entrada de habilitación (EN) por cada puerta AND y al final se hace un OR entre todas las salidas de las puertas AND. La función de un multiplexor da lugar a diversas aplicaciones: . Selector de entradas.. . Serializador: Convierte datos desde el formato paralelo al formato serie.. . Transmisión multiplexada: Utilizando las mismas líneas de conexión, se transmiten diferentes datos de distinta procedencia.. . Realización de funciones lógicas: Utilizando inversores y conectando a 0 o 1 las entradas según interese, se consigue diseñar funciones complejas, de un modo más compacto que con las tradicionales puertas lógicas[16].. 36.
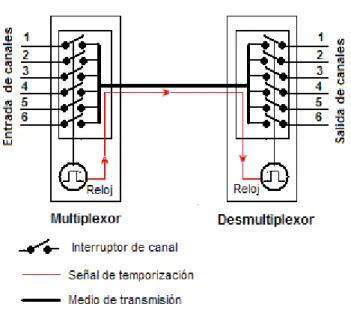
(37) 1.7.1. Tipos de multiplexación. Como se dijo anteriormente el multiplexor se utiliza como dispositivo que puede recibir varias entradas y transmitirlas por un medio de transmisión compartido, y de acuerdo a la forma en que se realice esta división del medio de transmisión, existen varios tipos de multiplexación: . Multiplexación por división de frecuencia.. . Multiplexación por división de tiempo.. . Multiplexación por división de código.. . Multiplexación por división de longitud de onda.. A continuación se explicará la multiplexación por división de tiempo, cuyo principio de funcionamiento es de utilidad para este proyecto. Multiplexación por división de tiempo: La multiplexación por división de tiempo (MDT o TDM, del inglés Time Division Multiplexing), es el tipo de multiplexación más utilizado en la actualidad, especialmente en los sistemas de transmisión digitales. En ella, el ancho de banda total del medio de transmisión es asignado a cada canal durante una fracción del tiempo total (intervalo de tiempo). En la figura 1.8 siguiente se representa un conjunto multiplexor-demultiplexor para ilustrar cómo se realiza la multiplexación-demultiplexación por división de tiempo.. 37.
(38) Figura 1.8 Conjunto multiplexor-demultiplexor por división de tiempo.. En este circuito, las entradas de seis canales llegan a los denominados interruptores de canal, los cuales se cierran de forma secuencial, controlados por una señal de reloj, de manera que cada canal es conectado al medio de transmisión durante un tiempo determinado por la duración de los pulsos de reloj. En el extremo distante, el demultiplexor realiza la función inversa, o sea, conecta el medio de transmisión, secuencialmente, con la salida de cada uno de los seis canales mediante interruptores controlados por el reloj del demultiplexor. Este reloj del extremo receptor funciona de forma sincronizada con el del multiplexor del extremo emisor, mediante señales de temporización que son transmitidas a través del propio medio de transmisión o por un camino[16]. 1.7.2. Tipos de multiplexores. Dentro de la gran variedad de multiplexores que existen en el mercado, conviene destacar el multiplexor de 8 entradas, a causa de su gran utilidad en circuitos digitales y sobre todo en este trabajo. Este tipo de multiplexor puede tener la entrada de strobe o no. La tecnología utilizada para su diseño es TTL, de alta integración, y la potencia que disipan suele ser de unos 150 mW. El tiempo de retardo típico es de unos 25 38.
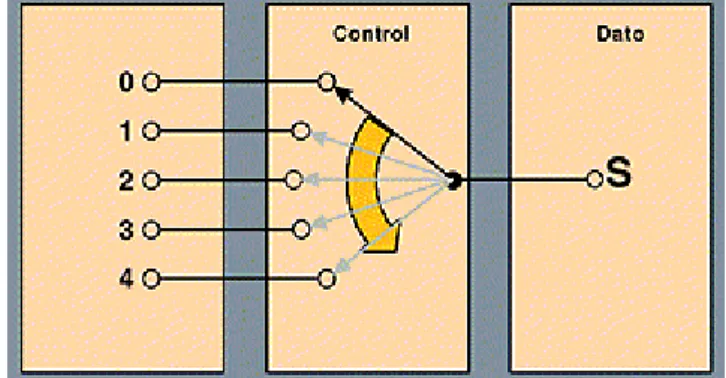
(39) nanosegundos y tienen un fan - out de 10. Normalmente, estos circuitos suelen dar dos tipos de salida: una afirmada y la otra negada. En el caso de tener que emplear algún tipo de orden superior, es decir, con un número de entradas considerable, pudiesen ser más de 16 entradas, se necesita utilizar más de un multiplexor, como se representa en la figura 1.9. La forma de conectarlos entre sí depende de la aplicación concreta de que se trate, pero siempre habrá que disponer de más de una etapa de multiplexores, lo cual acarrea un tiempo de retardo. Así, por ejemplo, si se quisiera conformar un multiplexor de 32 entradas, para seleccionar un dato de entre las 32 entradas de que se dispone, se deberá diseñar un sistema análogo al representado en la figura siguiente[17].. Figura 1.9 Multiplexor de 32 entradas construido a partir de cuatro multiplexores de 8 entradas y uno de 4 entradas[17].. 1.8. Demultiplexores. Características. Un demultiplexor consta de una entrada de datos, varias señales de control y las líneas de salida, como se muestra en la figura 1.10.. 39.
(40) Figura 1.10 Esquema de un demultiplexor.. El demultiplexor es un circuito destinado a transmitir una señal binaria a una determinada línea, elegida mediante un seleccionador, de entre las diversas líneas existentes. Estos son circuitos que realizan una función contraria a la de los multiplexores. La analogía mecánica de un demultiplexor es un selector con una entrada y varias posiciones de salida, como se describe en la siguiente figura.. Figura 1.11 Analogía mecánica de un demultiplexor.. Un decodificador se convierte en un demultiplexor añadiéndole una señal más a su circuitería interna (Figura 1.12). Si se aplica esta señal, la salida será el complemento de dicha señal, ya que la salida es 0 si todas las entradas son 1, y aparecerá únicamente en la línea seleccionada.. 40.
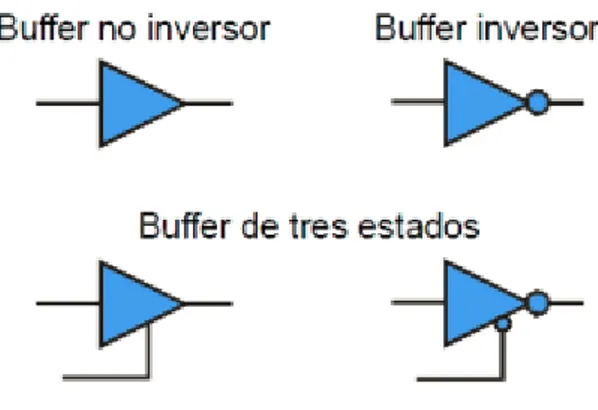
(41) Figura 1.12 Esquema de la construcción de un demultiplexor a partir de un decodificador.. En la figura anterior se aprecia que se puede aplicar a un demultiplexor una señal de habilitación o enable, conectándose en cascada el decodificador con el circuito compuesto de una puerta AND y dos puertas NOT, cuyas entradas son la señal de habilitación y el dato que se quiere transmitir. Si la entrada de habilitación es 0, la salida será el complemento del dato, es decir, que el dato aparecerá en la línea con el código deseado. Si la entrada de enable es 1, la salida será 0, se inhiben los datos en cualquier línea y todas las entradas permanecen en 1. En la práctica, no existen circuitos integrados demultiplexores, sino que se fabrican circuitos decodificadores/demultiplexores, que en realidad son decodificadores con entrada de inhibición (enable o strobe) [18]. 1.9. Compuertas buffer. Características. Las compuertas buffer o separadores son esencialmente compuertas con una alta capacidad de corriente de salida. Esta característica les permite manejar directamente. LED’s,. relevadores. de estado. sólido,. relevadores. electromecánicos y otras cargas que no pueden ser impulsadas directamente por compuertas comunes. Los buffers se utilizan principalmente como amplificadores de corriente. Un buffer a la salida de un circuito integrado digital aumenta su fan-out, es decir, la máxima corriente de salida que este puede suministrar. Existen básicamente dos clases de buffers: inversores y no inversores (figura 1.13). Desde el punto de vista lógico, los buffers inversores operan como inversores convencionales, mientras que los buffers no inversores entregan el mismo nivel lógico que reciben.. 41.
(42) Figura 1.13 Tipos de buffer.. Un buffer se puede conectar a una carga de dos formas: como disipador de corriente (modo sink) o como fuente de corriente (modo source). En el modo sink la carga se conecta entre la salida y el positivo de la fuente, mientras que en el modo source la carga se conecta entre la salida y tierra[19]. 1.10. Circuitos multivibradores. Características. Un multivibrador es un circuito oscilador capaz de generar una onda cuadrada. Según su funcionamiento, se pueden dividir en dos clases: . De funcionamiento continuo, astable o de oscilación libre.. . De funcionamiento impulsado: a partir de una señal de disparo o impulso sale de su estado de reposo. o. Si posee dos de dichos estados, se denomina biestable.. o. Si posee uno, se le llama monoestable.. En su forma más simple son dos sencillos transistores realimentados entre sí. Usando redes de resistencias y condensadores en esa realimentación se pueden definir los periodos de inestabilidad. Un circuito integrado multivibrador muy popular es el 555, que usa un sofisticado diseño para lograr una gran precisión y flexibilidad con muy pocos componentes externos[20]. 1.10.1. Multivibrador astable. Los multivibradores astables son circuitos gobernados por una red de tiempo Resistencia-Capacitor (R-C) y un circuito de realimentación; no poseen un 42.
(43) estado estable sino dos metaestables[21] (Figura 1.14). Se pueden formar con amplificadores operacionales,. FET’s, BJT’s, compuertas lógicas y circuitos. integrados.[22]. Figura 1.14 Estados de un multivibrador astable.. A continuación se muestra en la figura 1.15, un ejemplo de multivibrador astable formado con el circuito integrado LM 555.. Figura 1.15 Multivibrador astable con el circuito integrado LM 555.. Para el diseño es preciso demostrar que: t1=0.693 * R1 * C , para un nivel alto (tiempo de carga de C).. (1.1). t2=0.693 * R1 * C , para un nivel bajo (tiempo de descarga de C).. (1.2). T= 1.386 * R1 * C, (período total).. (1.3). F=0.722/(R1 * C), (frecuencia).. (1.4). [23]. 43.
(44) 1.10.2. Multivibrador biestable. Los biestables son circuitos binarios (con dos estados) en los que ambos estados son estables, de manera que hace falta una señal externa de excitación para hacerlos cambiar de estado. Esta función de excitación define al tipo de biestable (D, T, RS o JK). En la electrónica combinacional no existía el tiempo, sin embargo en la electrónica secuencial es esencial la posición relativa en la que ocurren los sucesos (eventos). Con la introducción anterior se puede definir formalmente un biestable como un circuito secuencial con dos estados estables, es decir, tiene memoria y una con una salida que puede permanecer indefinidamente en uno de los dos estados posibles. Al ser secuencial, las salidas dependen de las entradas y del estado anterior. Un biestable almacena la información de 1 bit[24]. 1.10.3.. Multivibrador monoestable.. El circuito multivibrador monoestable se caracteriza por presentar un único estado estable en régimen permanente, y cuando mediante una excitación externa se genera una perturbación que lo aparta de ese estado estable, el circuito evoluciona en un estado no estable que provoca un cambio en la salida y al cabo de un cierto tiempo predeterminado, vuelve al estado estable. En régimen permanente el circuito permanece en el estado estable.. La. conmutación al estado semiestable es forzada mediante una excitación externa adecuada, en su presencia el circuito inicia un régimen transitorio para, una vez transcurrido el tiempo de duración del estado no estable, retornar al estado estable. El tiempo que el circuito permanece en el estado no estable, comúnmente denominado período semiestable, queda determinado por los valores de algunos elementos pasivos que componen el circuito[25]. La figura 1.16 muestra un ejemplo de circuito monoestable con el circuito integrado LM 555 utilizado como temporizador (timer), a partir de la cual se deriva la siguiente ecuación: T=1,1 * Ra * C (segundos). (1.5). 44.
(45) Figura 1.16 Circuito monoestable con el circuito integrado LM 555 utilizado como temporizador (timer). [23]. 1.11. Contadores. Características. Un contador es un circuito en el que sus salidas siguen una secuencia fija que cuando acaba vuelve a empezar, o circuitos que reciben sus datos de manera secuencial, ordenados en distintos intervalos de tiempo. Los pulsos de entrada pueden ser pulsos de reloj u originarse en una fuente externa y pueden ocurrir a intervalos de tiempos fijos o aleatorios. El número de salidas limita el máximo número que se puede contar. Existe una gran cantidad de contadores con diferentes características y funcionamiento, las cuales se pueden identificar por las funciones de sus entradas. El siguiente contador genérico muestra algunas entradas y salidas de las que suelen disponer los contadores[26].. 45.
(46) Figura 1.17 Esquema de un contador genérico[26].. Los contadores son circuitos secuenciales creados con biestables (figura 1.18) y también son utilizadas las puertas lógicas. Un contador de n-bits está conformado por n flip-flops y puede contar desde 0 hasta 2n-1[10].. Figura 1.18 Contador con biestables[26].. Cuando la entrada varía con cada pulso de reloj, los flip-flops cambian sus estados introduciendo un nuevo valor de salida y en caso de suceder lo contrario, mantienen su estado presente[10]. 1.11.1. Tipos de contadores. Los contadores se pueden clasificar según:. 46.
(47) - El número de salidas del contador: 3 salidas (Máximo 8), 4 salidas (Máximo 16),... - El tipo de cuenta: ascendente, descendente, binaria, BCD, secuencias varias... - Dos grandes grupos: contadores asíncronos y contadores síncronos. Contadores asíncronos: En los contadores asíncronos las salidas de cada flip-flop sirven de entrada CP para disparar otro flip-flop (figura 1.19).. Figura 1.19 Esquema de un contador asíncrono.. El primer biestable tendrá una entrada de tipo asíncrono, es decir, que se acertará de forma aleatoria y cuando lo haga, el circuito realizará una cuenta. El resto del tiempo, los flip-flops no cambiarán su estado presente. Contadores síncronos: Al contrario de los asíncronos, los pulsos de reloj se aplican a las entradas CP de todos los flip-flops.[26]. 47.
(48) CAPÍTULO. 2.. IMPLEMENTACIÓN. DEL. HARDWARE. DEL. SISTEMA ELECTRÓNICO VIGÍA 2 PARA LA SUPERVISIÓN Y CONTROL DE EVENTOS POR PUERTO PARALELO 1.1. Introducción. Con el proyecto Vigía 2 se persigue lograr no solo la supervisión de un gran número de eventos a través del puerto paralelo, sino también garantizar el desarrollo de acciones de telecontrol que, de acuerdo a las necesidades, respondan a los eventos captados. Es por ello que, con el fin de lograr un entendimiento más profundo sobre la implementación de la interfaz electrónica para la supervisión y el control de eventos por puerto paralelo, se divide su explicación en 4 particiones, dos de ellas dedicadas al diseño del sistema de supervisión local y remota de eventos, teniendo en cuenta el extremo remoto supervisado y el punto supervisor territorial. Las restantes dos particiones fundamentan el diseño del sistema de telecontrol efectuado desde el punto de control territorial hacia los puntos remotos controlados. 1.2. Diagrama en bloques del sistema electrónico Vigía 2 para realizar la supervisión de eventos. Explicación funcional de cada una de sus partes. A continuación se muestra el diagrama en bloques del extremo emisor del nuevo sistema electrónico que se requiere implementar para la supervisión de eventos.. 48.
Figure
![Figura 1.5 Sistema de recepción para la especificación 1151 de British Telecom.[13]](https://thumb-us.123doks.com/thumbv2/123dok_es/7321445.452173/33.892.316.622.821.1022/figura-sistema-de-recepción-para-especificación-british-telecom.webp)
+7
![Figura 1.7 Esquema de un multiplexor 2 a 1.Puede compararse con un conmutador analógico[15]](https://thumb-us.123doks.com/thumbv2/123dok_es/7321445.452173/35.892.304.640.824.971/figura-esquema-multiplexor-puede-compararse-con-conmutador-analógico.webp)
![Figura 1.9 Multiplexor de 32 entradas construido a partir de cuatro multiplexores de 8 entradas y uno de 4 entradas[17]](https://thumb-us.123doks.com/thumbv2/123dok_es/7321445.452173/39.892.333.605.492.714/figura-multiplexor-entradas-construido-partir-multiplexores-entradas-entradas.webp)
Documento similar