Efectos de la localización y su exactitud en las redes de radio cognitiva
105
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Efectos de la localización y su exactitud en las redes de radio cognitiva. Autor: Rónier Sierra Dávila E-mail: [email protected]. Tutor: MSc. Samuel Montejo Sánchez Prof. Dpto. de Telecomunicaciones y Electrónica Facultad de Ingeniería Eléctrica. UCLV. E-mail: [email protected]. Santa Clara 2011 "Año 53 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “La verdadera sabiduría está en reconocer la propia ignorancia…”. Sócrates.
(5) ii. DEDICATORIA. A mi padre, máximo impulsor de mi superación profesional, quien hizo de su sueño mi realidad. A mi madre, mi institutriz de la vida, mi apoyo incondicional. A mi hermano Roysell, que de seguro hubiera estado orgulloso de mí. A mi hermano Reldys, con quien comparto gustosamente este logro. A mi princesa, mi más preciado tesoro..
(6) iii. AGRADECIMIENTOS. A mis padres, por la educación primera y más importante de todas, por su guía y apoyo constantes e incondicionales, por habérmelo dado todo y más, porque soy quien soy gracias a ellos. A María Elena, por su eterno apoyo, y por todos los valores y enseñanzas que me ha inculcado. A Elizabeth, por hacerme crecer y ser mejor como persona, y por tantas otras cosas imposibles de escribir. A tío Pupy, por todo el apoyo que me ha brindado. A Samuel, por todo lo que ha hecho por mí, por confiar en mí desde el principio y por aportarme tanto como profesional y como persona. A mi familia y amigos. A aquellas personas que me han apoyado y que de alguna manera han contribuido a mi desarrollo intelectual, profesional y humano..
(7) iv. TAREA TÉCNICA. 1. Realizar un estudio sobre la radio cognitiva como tecnología mecanismo para la reutilización del espectro radioeléctrico. 2. Realizar un estudio sobre las técnicas de localización existentes, que puedan ser empleadas en las redes de radio cognitiva. 3. Analizar los efectos de la localización y su exactitud en el desempeño de las redes de radio cognitiva. 4.. Estudiar y proponer métodos teóricos que puedan ser empleados para evaluar la efectividad de las técnicas de localización.. 5. Evaluar a través de simulación el impacto de la exactitud de la localización en el desempeño de las redes de radio cognitiva. 6. Implementar un algoritmo para la comparación y validación en cuanto a exactitud de diferentes técnicas de localización.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La radio cognitiva tiene un gran impacto en el eficiente aprovechamiento del espectro radioeléctrico en la actualidad. Sin embargo, la utilización de esta tecnología supone un consumo considerable de tiempo y energía debido al sensado continuo de las bandas de frecuencias que la misma requiere. Este trabajo contiene un estudio sobre la forma de reducir los gastos antes mencionados a través del uso de la localización en las redes de radio cognitiva. Para ello, se estudiaron las principales técnicas de localización existentes y la forma de evaluar y comparar las mismas, así como las principales características de la radio cognitiva. El presente documento expone un estudio teórico sobre la probabilidad de coexistencia de un enlace primario basado en infraestructura y un enlace secundario “ad hoc” entre dos dispositivos de radio cognitiva con el conocimiento de la localización que se encuentran dentro del área de cobertura de la infraestructura, cuando ambas conexiones utilizan las mismas frecuencias. Además, incluye un análisis de los efectos de la exactitud de la localización sobre dicha probabilidad, y se propone un método analítico para la estimación de la misma. Por último, fueron realizados experimentos de simulación que validan el método propuesto, y que muestran la influencia de los diferentes parámetros involucrados en el análisis sobre la probabilidad de coexistencia de ambos enlaces. Como resultado de este trabajo se implementó además un software para la estimación del límite de Cramér-Rao para diferentes técnicas de localización expresado como el radio 2-sigma de una elipse de incertidumbre asociada a la localización de los nodos de una red inalámbrica..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v I.. INTRODUCCIÓN .......................................................................................................... 1. CAPÍTULO 1. 1.1. REVISIÓN BIBLIOGRÁFICA................................................................. 5. Radio cognitiva ....................................................................................................... 6. 1.1.1. Características principales ................................................................................ 6. 1.1.2. Antecedentes ..................................................................................................... 7. 1.1.3. Terminología ..................................................................................................... 8. 1.1.4. Tecnología ........................................................................................................ 9. 1.1.5. Funciones principales ....................................................................................... 9. 1.2. Localización en redes inalámbricas ...................................................................... 10. 1.2.1. Estimación de la posición ............................................................................... 11. 1.2.2. Técnicas de localización ................................................................................. 12. 1.2.3. Localización cooperativa en redes inalámbricas ............................................ 20. 1.3. Cota de Cramér-Rao (CCR) .................................................................................. 22.
(10) vii 1.3.1. Conceptos básicos ........................................................................................... 22. 1.3.2. Calidad de los estimadores ............................................................................. 23. 1.3.3. Cota de Cramér-Rao ....................................................................................... 25. CAPÍTULO 2.. EFECTOS DE LA LOCALIZACIÓN Y SU EXACTITUD EN EL. DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA ............................................... 27 2.1. Impacto de la localización y su exactitud en la reutilización del espectro. radioeléctrico .................................................................................................................... 28 2.1.1. Escenario del sistema y definición de parámetros .......................................... 29. 2.1.2. Análisis de la probabilidad de transmisión concurrente. Caso ideal .............. 31. 2.1.3. Análisis de la probabilidad de transmisión concurrente. Caso real ................ 36. 2.1.4. Efectos del ensombrecimiento ........................................................................ 50. 2.2. Cálculo del límite inferior de la varianza del error de diferentes técnicas de. localización ....................................................................................................................... 51 2.2.1. Planteamiento del problema............................................................................ 52. 2.2.2. Cálculo de la cota de Cramér-Rao .................................................................. 53. CAPÍTULO 3. 3.1. RESULTADOS EXPERIMENTALES Y DISCUSIÓN......................... 56. Escenario para las simulaciones ........................................................................... 56. 3.1.1. Caso uplink ..................................................................................................... 57. 3.1.2. Caso downlink ................................................................................................ 61. 3.2. Cálculo del radio de incertidumbre en la localización .......................................... 66. 3.2.1. Escenario ......................................................................................................... 67. 3.2.2. Resultados ....................................................................................................... 69. CONCLUSIONES Y RECOMENDACIONES ................................................................... 71 Conclusiones ..................................................................................................................... 71 Recomendaciones ............................................................................................................. 72.
(11) viii REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 73 ANEXOS .............................................................................................................................. 79 I.. Ejemplos resueltos sobre la cota de Cramér-Rao ..................................................... 79. II.. Desarrollos de ecuaciones ......................................................................................... 81. III.. Distorsión de las regiones excluyente e incluyente .............................................. 87. IV.. GUI ....................................................................................................................... 90. V.. Programa para el cálculo del radio 2-σ ..................................................................... 91.
(12) INTRODUCCIÓN. 1. I. INTRODUCCIÓN. En la actualidad, el problema de la escasez de recursos espectrales tiene un impacto negativo en el desarrollo de nuevas tecnologías y aplicaciones. La constante proliferación de nuevas tecnologías de radio, servicios y operadores durante los últimos años ha dado lugar a la asignación y consecuente agotamiento de las bandas de frecuencia de interés práctico para las comunicaciones de radio. No obstante, estudios recientes han demostrado que el uso del espectro no es homogéneo ni tampoco eficiente. Mientras ciertas bandas se encuentran congestionadas y sometidas a un uso intensivo, otras regiones del espectro se hallan infrautilizadas y, en algunos casos, completamente desocupadas. En este contexto, la radio cognitiva ha atraído la atención de investigadores y de la industria debido a su impacto en el eficiente aprovechamiento del espectro radioeléctrico. Las redes de radio cognitiva permiten que ciertos usuarios sin licencia puedan acceder a determinadas bandas de radio frecuencia de manera temporal y oportuna siempre y cuando dichas bandas no se encuentren utilizadas por los usuarios legítimos con licencia, y las transmisiones secundarias no impliquen la generación de niveles de interferencia perjudiciales o intolerables sobre la red primaria. Para transmitir en presencia de un sistema primario en su misma banda de frecuencias y a la vez aplicar con efectividad esta política de no interferencia, un dispositivo de radio cognitiva debe sensar continuamente el espectro en busca de oportunidades de transmisión con el fin de evitar afectar al sistema primario. Sin embargo, el sensado continuo que implica la detección del espectro requiere un procesamiento de señal sofisticado y de alto consumo de tiempo y energía, razón por la cual se han investigado nuevas formas de desarrollar una eficiente reutilización del radioespectro. Algunas de ellas proponen estimar y explotar una región donde sea posible la transmisión concurrente. Para conseguir una.
(13) INTRODUCCIÓN. 2. acertada estimación de esta región, es imprescindible que los dispositivos radio cognitivos tengan información de las ubicaciones suyas y las de los móviles primarios. De forma intuitiva se puede apreciar que este método será más efectivo en la medida en que la región estimada coincida con la verdadera región de útil aprovechamiento para la transmisión cognitiva, lo que dependerá a su vez de la exactitud que pueda brindar la técnica de localización utilizada para el cálculo de las posiciones de los nodos. El presente trabajo realiza un estudio de las técnicas de localización existentes y de los criterios de evaluación de las mismas que permitan establecer una comparación entre ellas. También expone un análisis sobre la probabilidad de transmisión concurrente de un enlace basado en infraestructura y una conexión de tipo ad hoc entre dos dispositivos de radio cognitiva que poseen la información de la localización de todos los nodos de la red híbrida. Se estudia el impacto de la exactitud de la localización de los nodos primarios y secundarios en la probabilidad de coexistencia. Los resultados analíticos son comprobados y validados mediante simulación. Debido a la relevancia de la información del rango de imprecisión de la localización es implementado y discutido un método para la evaluación de la exactitud de diferentes técnicas de localización. Los resultados obtenidos por este método serán de gran utilidad en la comparación y selección de técnicas de localización, en dependencia de las necesidades y características del escenario. Objetivo general Evaluar el impacto de la localización y su exactitud en el desempeño de las redes de radio cognitiva. Objetivos específicos 1. Estudiar los antecedentes, las características y funcionalidades de la radio cognitiva. 2. Estudiar las técnicas de localización existentes y los métodos de evaluación de las mismas. 3. Analizar los efectos del uso de localización y su exactitud en el desempeño de las redes de radio cognitiva..
(14) INTRODUCCIÓN. 3. 4. Realizar experimentos de simulación en los que se tenga en cuenta el rango de inexactitud en la localización. 5. Implementar una aplicación que permita la comparación y validación en cuanto a exactitud de diferentes técnicas de localización. 6. Documentar el análisis realizado y los resultados obtenidos, extendiendo así su valor teórico-práctico. Interrogantes científicas ¿Qué es la radio cognitiva? ¿Cuáles son los efectos de utilizar localización en el desempeño y la eficiencia de las redes de radio cognitiva? ¿Cuáles son las principales técnicas de localización? ¿Cuál es el efecto del rango de imprecisión de las técnicas de localización en el desempeño de las redes de radio cognitiva? ¿Cómo evaluar la exactitud de las técnicas de localización? Organización del informe El informe de la investigación se estructura en introducción, capitulario, conclusiones, recomendaciones, referencias bibliográficas y anexos. En la introducción se define la importancia, actualidad y necesidad del tema que se aborda y se dejarán explícitos los elementos del diseño teórico. El capítulo 1 expone un estudio general sobre la radio cognitiva, las técnicas de localización y los métodos de evaluación de exactitud de las mismas. En el capítulo 2 se realiza un análisis de los efectos de la localización y su rango de incertidumbre en el desempeño de las redes de radio cognitiva, así como de la aplicación práctica de un método de evaluación de exactitud de las técnicas de localización. En el capítulo 3 se muestran los resultados de experimentos de simulación para la estimación de la probabilidad de transmisión concurrente de un enlace primario basado en infraestructura y una conexión secundaria ad hoc entre dos dispositivos de radio cognitiva, considerando que los mismos poseen el conocimiento de la localización de los restantes nodos de la red híbrida. También se realiza el cálculo de la varianza mínima del error para diferentes técnicas de localización, expresada en forma de radio de incertidumbre 2-sigma y obtenida a través de la utilización de dos herramientas de software basadas en el método de Cramér-Rao..
(15) INTRODUCCIÓN. 4. Las conclusiones reflejan un análisis de los resultados obtenidos a partir de los objetivos que trazados inicialmente. Las recomendaciones son propuestas con el objetivo de enriquecer el estudio realizado y los resultados obtenidos. La bibliografía consultada se muestra en las referencias bibliográficas siguiendo las normas establecidas. Los anexos recogen las demostraciones y desarrollos de ecuaciones que por su complejidad y extensión no fueron incluidas en el capitulario del trabajo..
(16) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. En la actualidad, las redes y aplicaciones inalámbricas están reguladas mediante una política de asignación fija del espectro a distintas empresas, usuarios y/o servicios mediante autorización, permiso o licencia de uso a largo plazo. La vertiginosa proliferación de tecnologías de radio, servicios y operadores durante los últimos años ha dado lugar a la asignación de las bandas de frecuencia de interés práctico para las comunicaciones inalámbricas, lo que ha implicado la consecuente disminución de bandas disponibles para nuevas aplicaciones. Sin embargo, estudios recientes han demostrado que gran parte del espectro licenciado asignado está subutilizado [1-4], observándose grandes variaciones temporales y geográficas en su uso, con rangos de utilización desde el 15% al 85% [5, 6]. En este contexto surgió el concepto de radio cognitiva (CR, del inglés cognitive radio) como una prometedora solución a la flexible y eficiente utilización del espectro. Esta tecnología permite a los dispositivos cambiar sus parámetros particulares de transmisión y/o recepción, como la frecuencia de operación, en dependencia de sus necesidades, basándose para ello en el sensado de parámetros como el espectro de radiofrecuencias, el comportamiento de los usuarios y el estado de la red. Esto hace que este tipo de redes pueda aumentar el aprovechamiento eficiente del espectro, reutilizando las bandas espectrales ya asignadas a los usuarios primarios sin causarles interferencia significativa. Sin embargo, este continuo sensado de frecuencias requiere un considerable consumo de tiempo y energía, por lo que ha surgido la necesidad de encontrar una manera de reutilizar el espectro sin incurrir en estos grandes gastos. En este trabajo se expone un método basado en el conocimiento de la localización de los nodos de las redes primaria y de radio cognitiva, para calcular el área donde esta última puede operar de manera concurrente con.
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. la primera y en su misma banda de frecuencias sin afectar en forma significativa la calidad de su señal. Este capítulo contiene un estudio de la radio cognitiva, sus antecedentes, tecnología y funciones principales en el epígrafe 1.1; un estudio de la localización en redes inalámbricas, la localización cooperativa y los métodos de localización más utilizados actualmente, en el epígrafe 1.2; y por último en el epígrafe 1.3 se estudia un método que permite la evaluación y comparación en cuanto a exactitud de las diferentes técnicas de localización: el método de Crámer-Rao. 1.1 Radio cognitiva La radio cognitiva es un sistema de radio definido por software inteligente o cognitivo [7]. La idea básica en que se sustenta una red de radio cognitiva consiste en permitir que ciertos usuarios sin licencia, denominados usuarios secundarios, puedan acceder de manera temporal y oportuna a las bandas de frecuencia que no estén siendo utilizadas por los usuarios legítimos con licencia, denominados usuarios primarios o red primaria [6, 8]. Estas oportunidades espectrales son frecuentemente denominadas huecos espectrales. La utilización de estas oportunidades por parte de los usuarios secundarios se podrá consumar siempre que sus transmisiones no impliquen la generación de niveles de interferencia perjudiciales o intolerables sobre la red primaria [6, 8]. 1.1.1. Características principales. Las dos características principales de un dispositivo de CR son [5]: 1. Capacidad cognitiva: tecnología necesaria para capturar la información de su entorno de radiofrecuencia e identificar las partes del espectro que no estén siendo utilizadas. 2. Auto-reconfiguración: tecnología necesaria para que el dispositivo pueda variar, de manera dinámica, distintos parámetros relacionados con la transmisión y/o recepción (ej.: frecuencia, potencia y modulación), de acuerdo con su entorno. Según la FCC [9] un dispositivo de CR debe ser capaz de reconfigurar los siguientes parámetros:.
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. 1. Frecuencia portadora: el dispositivo de CR debe ser capaz de seleccionar la frecuencia de portadora más adecuada basándose en la información sobre el espectro radioeléctrico disponible y del tipo de transmisión a realizar. 2. Modulación: el dispositivo debe ser capaz de seleccionar el tipo de modulación más adecuado en función de las características de canal y los requerimientos del usuario. 3. Potencia transmitida: si las características del medio permitieran una reducción en la potencia transmitida, el dispositivo CR debería reducirla de manera que mantenga la calidad de la transmisión y permita aumentar el número de usuarios compartiendo espectro, reduciendo la interferencia entre ellos. 4. Sistemas de comunicación: un dispositivo de CR debe ser capaz de operar a través de distintos sistemas de comunicación. En general, todos los parámetros de transmisión de un dispositivo de CR deben ser reconfigurables incluso durante la transmisión, adaptándose a los cambios que se produzcan en su entorno. Además, existen otras características adicionales [7]: Algoritmos de inteligencia artificial: el dispositivo no solo monitoriza su entorno, sino que además, aprende de él. Protocolos de comunicación: necesario para intentar minimizar las interferencias con los usuarios primarios o con otros de CR. Además, si se asume un entorno en el que varios usuarios de CR pretenden acceder a los mismos recursos, también sería necesario implementar algún tipo de protocolo para la negociación. Interfaz con el usuario: a fin de mantener al mismo informado en todo momento. 1.1.2. Antecedentes. La idea fundamental de la radio cognitiva fue presentada por primera vez en 1999 en un artículo escrito por Joseph Mitola III y Gerald Q. Maguire [10]. En este se presenta una nueva forma de abordar la comunicación inalámbrica concebida como un objetivo hacia el cual debería evolucionar una plataforma de radio definida por software. Propuesto así, es un sistema inalámbrico totalmente reconfigurable que varía sus parámetros de comunicación automáticamente dependiendo de las demandas de la red y/o los usuarios. Estudios realizados por las corporaciones legislativas de varios países, como la Comisión Federal de Comunicaciones (FCC, del inglés Federal Communications Comission) en.
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. Estados unidos, determinaron que gran parte del espectro de radio frecuencias es ineficientemente utilizado [2, 5]. Por ejemplo, las bandas de la red celular están sobrecargadas en la mayor parte del mundo, mientras que la banda de radioaficionados y las frecuencias de localización están siendo pobremente aprovechadas. Investigaciones independientes en algunos países [3, 11] confirmaron esta observación y además concluyeron que la utilización del espectro depende fuertemente del tiempo y del lugar. Una asignación fija del espectro provoca que las frecuencias asignadas a servicios específicos, prácticamente en desuso, no puedan ser utilizadas por usuarios no autorizados, incluso si la transmisión de estos no introduce interferencia en estos servicios previamente desocupados. Poder aprovechar eficazmente estos huecos espectrales es el principal objetivo de la radio cognitiva. 1.1.3. Terminología. Existen diversos tipos de radios cognitivas dependiendo del conjunto de parámetros que se tienen en consideración a la hora de tomar decisiones sobre la alteración de la trasmisión y/o recepción. Las dos principales son [12]: 1.. Radio cognitiva completa: cualquier parámetro observado en un nodo inalámbrico y/o una red se tiene en cuenta para tomar decisiones sobre el cambio de parámetros de transmisión y/o recepción.. 2.. Radio cognitiva detectora del espectro: se toman las decisiones basándose solamente en el estado del espectro de radiofrecuencia.. Además, dependiendo de las partes del espectro disponibles para la radio cognitiva podemos distinguir: 1.. Radio cognitiva de banda bajo licencia: cuando la radio cognitiva es capaz de usar bandas asignadas a usuarios con licencia, además de bandas de libre acceso.. 2.. Radio cognitiva de banda de libre acceso: cuando la radio cognitiva solo puede utilizar las partes de libre acceso del espectro de radiofrecuencia. Un ejemplo de este tipo de radio es la especificación IEEE 802.15, que puede ser revisada en [13]..
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.1.4. 9. Tecnología. Aunque inicialmente la radio cognitiva se pensó como una ampliación de la radio definida por software (radio cognitiva completa) la mayor parte del trabajo de investigación actualmente se centra en la radio cognitiva detectora del espectro. El problema esencial de la radio cognitiva detectora del espectro es el diseño de dispositivos detectores de alta calidad y algoritmos para intercambiar los datos de detección del espectro entre nodos. Se mostró en [1] que un simple detector de energía no puede garantizar una adecuada detección de presencia de señal. Esto reclama técnicas más sofisticadas de detección del espectro y requiere que la información sobre el estado del espectro se intercambie regularmente entre los nodos. En [14] se muestra que el incremento del número de nodos que cooperan en la detección disminuye la probabilidad de que existan detecciones falsas. 1.1.5. Funciones principales. Las principales funciones de las radios cognitivas son [12]: Detección espectral: es la capacidad de un nodo de sensar y obtener información de la utilización espectral o la capacidad de poder comunicarse con otros nodos que la poseen, para así poder detectar los patrones de uso de la banda de interés (tanto espaciales como temporales) por parte de los usuarios primarios [11, 15]. En general, las técnicas para detectar el espectro (spectrum sensing) se pueden dividir en tres categorías [7]: o Detección local: el dispositivo de CR decide de forma independiente sobre la existencia o no de del usuario primario, a partir de las mediciones realizadas por él mismo. o Detección cooperativa: la información sobre el sensado del espectro de varios dispositivos de CR se utiliza de forma de forma conjunta para la detección del usuario primario, mitigando así los efectos del multitrayecto y el ensombrecimiento. o Detección basada en interferencia: los dispositivos de CR pueden utilizar la banda de frecuencias del usuario con licencia mientras no excedan el límite de interferencia propuesto por la FCC, denominado temperatura de interferencia..
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. . 10. Administración del espectro: consiste en utilizar la parte del espectro que más se ajuste a las necesidades. La administración del espectro consta de dos pasos diferenciados: o Análisis de espectro: identificar las características de cada banda disponible (ej.: retardo y probabilidad de error.). o Decisión de espectro: comparar las características de cada una de las bandas con las requeridas por el usuario y seleccionar la que se va utilizar.. Movilidad espectral: es la capacidad del nodo de reconfigurar su sistema de transmisión cambiando su frecuencia de transmisión y/o recepción para adaptarse al entorno observado de forma imperceptible para el usuario. En este sentido los nodos de radio cognitiva son candidatos a incorporar las plataformas de radios definidas por software, que permiten un ajuste total tanto de la modulación y esquema de transmisión como de la banda de frecuencia en la que opera el nodo. Compartición del espectro: una red de radio cognitiva debe encontrar un modo de compartir los recursos disponibles del espectro con otros sistemas de radio cognitiva que conlleve a una utilización espectral equitativa y justa para todos los usuarios de este tipo. Este es uno de los mayores retos a la hora de diseñar los sistemas de radio cognitiva. 1.2 Localización en redes inalámbricas En la actualidad, el tema de la localización en redes inalámbricas ha atraído considerablemente la atención de la industria debido a la gran variedad de aplicaciones y servicios que, con estimación exacta de la posición, pueden convertirse en opciones viables tanto en redes celulares como en redes de corto rango. Algunas de estas aplicaciones son las siguientes: mejoramiento de la detección de fraudes y sistemas de transporte inteligentes para las primeras [16], e inventarios de rutas, detección de robos, rastreo de bomberos y mineros, y monitoreo de pacientes para las segundas [17], entre otras. En orden de implementar las mismas, la estimación exacta de la posición debe ser aplicada incluso en ambientes dinámicos, donde no se puede garantizar la propagación con línea de vista.
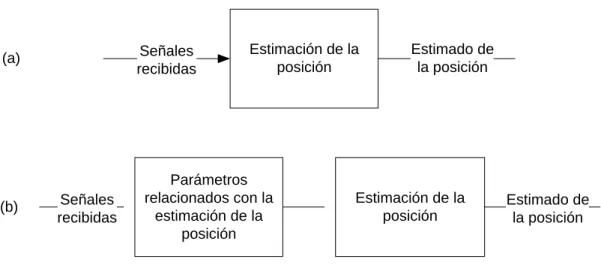
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. (LOS, del. 11. inglés line of sight) y están presentes los efectos de ensombrecimiento. (shadowing) y multitrayecto (multipath) [18]. 1.2.1. Estimación de la posición. La estimación de la posición se define como el proceso del cálculo aproximado de la posición de un nodo (dígase cualquier dispositivo involucrado en el proceso de estimación de la posición, como un teléfono celular, una estación base o un sensor inalámbrico), en este caso llamado nodo objetivo (target), en una red inalámbrica a través del intercambio de señales entre este y un número determinado de nodos de referencia. La posición del nodo objetivo puede ser estimada por el propio nodo, lo cual es llamado autoposicionamiento, o por una unidad central que obtiene información mediante los nodos de referencia, lo cual se denomina posicionamiento-remoto [19].. Señales recibidas. (a). (b). Señales recibidas. Estimación de la posición. Parámetros relacionados con la estimación de la posición. Estimado de la posición. Estimación de la posición. Estimado de la posición. Figura 1.1. (a) Posicionamiento directo. (b) Posicionamiento en dos pasos.. Para el auto-posicionamiento, las señales recibidas por el nodo objetivo son procesadas por el mismo nodo, mientras que para el posicionamiento remoto, cada nodo de referencia puede estimar el (los) parámetro(s) de la señal que recibe desde el nodo objetivo, y envía este estimado a la unidad central [20]. Además, dependiendo de si la posición es estimada directamente de las señales que intercambian los nodos o no, pueden ser considerados dos tipos de posicionamiento: 1. Directo: cuando la estimación de la posición es obtenida directamente de las señales intercambiadas entre los nodos (figura 1.1a) [21]..
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. 2. En dos pasos: cuando se extraen primero los parámetros de la señal y luego se estima la posición basado en los mismos (figura 1.1b) [20]. Aunque en general el desempeño de la segunda técnica no es tan bueno como el de la primera, es usualmente muy cercano al mismo para anchos de banda y/o relaciones de señal a ruido (SNR, del inglés signal to noise ratio) suficientemente altos, y puede tener mucha menos complejidad, [21, 22]. Es por esto que el posicionamiento en dos pasos es el método más utilizado en la mayoría de los sistemas de posicionamiento [20]. Comúnmente, los parámetros de la señal estimados en el primer paso de esta técnica se refieren a la potencia, dirección y/o tiempo de recorrido de la señal recibida. 1.2.2. Técnicas de localización. 1.2.2.1 Potencia de la señal recibida (RSS) La potencia de la señal recibida (RSS, del inglés received signal strenght) es un parámetro que contiene información relativa a la distancia a la que están los nodos que sostienen la comunicación. El mismo puede caracterizar una señal de tipo radioeléctrica, acústica o de otro tipo, aunque, teniendo en cuenta que los nodos inalámbricos se comunican entre sí a través de señales radioeléctricas, usualmente las mediciones se realizan a estas durante el intercambio normal de datos y de esta forma se evitan requerimientos adicionales de energía o de ancho de banda [23]. En el caso ideal, un estimado RSS en un nodo determina la posición de otro nodo en un círculo (si se trata de posicionamiento en dos dimensiones) a su alrededor (figura 1.2).. Nodo 1 d. Nodo 2. Figura 1.2. A través de las mediciones RSS y TOA, un nodo puede determinar la distancia lo cual define una circunferencia de incertidumbre.. hasta otro nodo,.
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 13. Aunque son relativamente poco costosas y simples de implementar en cuanto a hardware, las mediciones de tipo RSS son también notablemente vulnerables a los errores. A. Principales fuentes de error En el espacio libre, la potencia de señal disminuye proporcionalmente a. , donde. es la. distancia entre transmisor y receptor. En un canal terrestre típico, una señal experimenta efectos indeseables como el desvanecimiento por multitrayecto y el ensombrecimiento [24]. En el desvanecimiento por multitrayecto múltiples señales con diferentes amplitudes y fases arriban al receptor, y se añaden de forma constructiva o destructiva en función de la frecuencia, causando desvanecimiento selectivo en frecuencia. El efecto de este tipo de desvanecimiento puede ser disminuido usando un método de espectro expandido, que promedia la potencia recibida sobre un amplio rango de frecuencias. La potencia recibida medida usando un método de banda ancha (si el ancho de banda tiende a infinito) es equivalente a medir la suma de las potencias de cada señal multitrayecto [25]. Asumiendo que los efectos selectivos en frecuencia son reducidos, los errores en las mediciones de tipo RSS son causados en su mayoría por ensombrecimiento, como la atenuación de una señal debido a obstrucciones (edificios, paredes, árboles y otros) a través de las cuales la señal debe difractarse en la ruta entre el transmisor y el receptor. Los efectos del ensombrecimiento son usualmente modelados como aleatorios (como función del ambiente en el que la red es desplegada) [23]. B. Modelo estadístico La potencia recibida en canales reales obstruidos decae proporcionalmente a. donde. es el exponente de pérdidas de trayecto, típicamente entre 2 y 4 [23]. Idealmente, promediando RSS sobre un intervalo de tiempo suficientemente largo, quedan excluidos los efectos del desvanecimiento por multitrayecto y el ensombrecimiento, lo que resulta en el siguiente modelo: ,. (1.1).
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. donde. es la potencia recibida promedio en dB a una distancia. recibida en dB a una corta distancia de referencia. 14 y. es la potencia. [20, 23].. En la práctica, el intervalo de observación no es lo suficientemente largo como para mitigar los efectos del ensombrecimiento. Es por esto que los efectos de las pérdidas por trayectoria y los de ensombrecimiento son modelados como una variable aleatoria gaussiana centrada en cero con varianza de potencia recibida. en la escala logarítmica. De esta forma, la. en dB puede ser expresada como [20]: ,. donde. (1.2). está definida en (1.1).. Este modelo está basado en una amplia variedad de mediciones [26-28] y evidencia analítica [29]. La desviación estándar de la potencia recibida (expresada en dBm),. , se expresa en. unidades de dB y es relativamente constante con la distancia. Típicamente su valor oscila entre 4 y 12 [30]. El resultado más importante de este modelo es que la varianza de los estimados basados en RSS es proporcional a su rango real. Es decir, que. en dB sea constante con el rango. significa que los factores multiplicativos son constantes también, lo cual explica la proporcionalidad. Por ejemplo, si se considera un factor multiplicativo de 1.5, a un rango real de 100 m, las mediciones expresarían un rango de 150 m con error de 50 m; con 10 m, el rango medido sería de 15 m con error de 5 m, diez veces más pequeño. Es por esto que los errores RSS son referidos como multiplicativos, en comparación con los errores aditivos de TOA. De ello se infiere que el método RSS es más valioso en redes de sensores de alta densidad, donde las distancias entre sensores son menores [23]. 1.2.2.2 Tiempo de llegada (TOA) El tiempo que demora una señal, ya sea radio frecuencias (RF), infrarroja, acústica u otra, en viajar de un nodo a otro es llamado tiempo de llegada o de arribo (TOA, del inglés time of arrival) y provee información relativa a la distancia entre esos nodos, al igual que la RSS. Es por eso que, en ausencia de errores, el TOA estimado también provee una región.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 15. de incertidumbre en forma de circunferencia alrededor del nodo que realiza la estimación (figura 1.2). La cuestión fundamental de las técnicas basadas en tiempo es la habilidad de los receptores de estimar con precisión el tiempo de llegada de la señal que corresponde con la LOS. Esta estimación se ve afectada por ruido aditivo y señales multitrayecto. A. Principales fuentes de error Incluso en la ausencia de señales multitrayecto, la exactitud del tiempo de llegada está limitada por el ruido aditivo. Típicamente, el TOA estimado es el tiempo que maximiza la cros-correlación entre las señales recibidas y la señal transmitida conocida. Este estimador es conocido como el cros-correlator simple (SCC, del inglés simple cros-correlator). El cros-correlator generalizado (GCC, del inglés generalized cros-correlator) [31], extiende el SCC aplicando prefiltros para amplificar las componentes espectrales de la señal que tienen poco ruido y atenúa las componentes con mucho ruido. Por otro lado, los errores en los estimados basados en TOA en canales con multitrayecto pueden ser muchas veces mayores que aquellos causados por ruido aditivo solamente. Esencialmente, todas las componentes multitrayecto de arribo retardado constituyen una autointerferencia y disminuyen la SNR de la señal LOS deseada. En lugar de hallar el pico mayor de la cros-correlación en el canal multitrayecto, el receptor debe encontrar el pico que llega primero porque no hay garantía de que la señal LOS será la más fuerte entre las señales que arriban [23]. Generalmente, los errores en la estimación del TOA son causados por los siguientes dos problemas: 1. Multitrayecto de arribo prematuro: muchas señales multitrayecto llegan demasiado rápido después de la señal LOS, y su contribución a la cros-correlación entorpece la detección del pico de la señal LOS. 2. LOS atenuada: la señal LOS puede ser severamente atenuada comparada con las componentes multitrayecto de arribo tardío, causando que se pierda en el ruido y desaparezca completamente. Esto provoca grandes errores en el estimado del TOA..
(27) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 16. Con el decremento de la longitud de la trayectoria, la potencia de la señal LOS, (relativa a la potencias en las componentes multitrayecto) generalmente se incrementa [32]. Así, el problema de la LOS severamente atenuada es riguroso solo en redes con grandes distancias internodos. Aunque las componentes multitrayecto de arribo prematuro causan errores más pequeños, son muy difíciles de combatir. Generalmente, se requieren anchos de banda más grandes para obtener mayor resolución temporal. Notar finalmente que los retardos en el hardware transmisor y receptor se añaden al TOA medido. Aunque estos son normalmente conocidos, la varianza en las especificaciones de las componentes y los tiempos de respuesta pueden ser una fuente adicional de varianza del TOA. B. Modelo estadístico Según [23], para mediciones a corto rango, la demora del tiempo medido puede ser aproximadamente modelada como gaussiana: , donde. y. (1.3). son la media y la varianza del error de retardo respectivamente,. distancia entre los nodos que hacen las mediciones y. es la. es la velocidad de propagación.. Mediciones de espectro extendido de secuencia directa (DS-SS, del inglés direct sequence spread-spectrum) de banda ancha reportadas en [27] sustentan el modelo de error gaussiano y muestran. = 10.9 ns y. del inglés ultra-wideband) muestran. = 6.1 ns. Mediciones de banda ultra ancha (UWB, = 0.3 ns y. = 1.9 ns. El error medio. puede ser. estimado por el algoritmo de localización y de esta manera puede ser sustraído [33]. C. Calibración y sincronización Si los nodos tienen relojes sincronizados con precisión entonces el retraso de tiempo está determinado por la sustracción del tiempo de transmisión conocido menos el TOA medido. Para TOA en redes asincrónicas, una práctica común es usar mediciones TOA bidireccionales (o de ida y retorno) [23]. En este método, un sensor transmite una señal a un segundo sensor, que inmediatamente responde con su propia señal. En el primer sensor,.
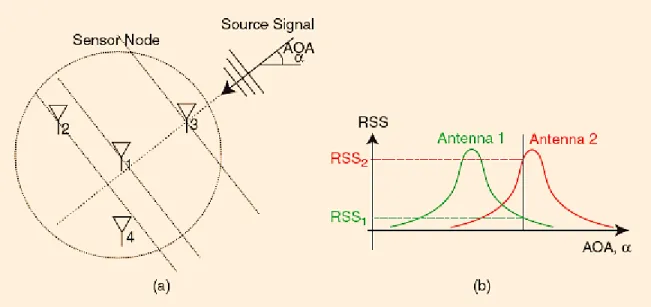
(28) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 17. el retraso medido entre su transmisión y la recepción de la respuesta es dos veces la demora de la propagación más el retraso interno en la respuesta del segundo sensor. Este retraso interno es conocido o medido, y enviado al primer sensor para ser sustraído. 1.2.2.3 Ángulo de llegada (AOA) El ángulo entre dos nodos se puede determinar estimando el parámetro ángulo de llegada (AOA, del inglés angle of arrival) de una señal que viaja entre esos nodos (figura 1.3). Proporcionando información acerca de la dirección de los nodos vecinos en lugar de la distancia a que se encuentran, las mediciones de tipo AOA constituyen un complemento de las mediciones de tipo RSS y TOA.. Nodo 2. Nodo 1 Figura 1.3. Mediciones AOA entre dos nodos.. Existen dos formas principales en que los sensores pueden medir el parámetro AOA. La más común es utilizando un arreglo de sensores y empleando técnicas de procesamiento de señal para estos arreglos en los nodos sensores (figura 1.4a). En este caso, cada nodo es equipado con dos o más sensores individuales (micrófonos para señales acústicas o antenas para señales de RF) cuyas localizaciones con respecto al nodo central son conocidas. El ángulo de llegada es estimado de las diferencias en los tiempos de arribo para una señal transmitida en cada uno de los elementos del arreglo de sensores si la geometría de este arreglo es conocida [23]. Para señales de banda estrecha (cuyo ancho de banda es mucho menor que su frecuencia central) la demora de tiempo corresponde a una demora de fase donde. tal que. ,. es la frecuencia central. Es por esto que las combinaciones de las demoras de. fases de las señales recibidas por diferentes elementos del arreglo son a menudo utilizadas.
(29) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 18. para determinar el AOA por los estimadores de este tipo [16]. Sin embargo, para sistemas de banda ancha, los retardos de las señales recibidas deben ser tenidos en cuenta, puesto que la demora de tiempo no puede ser representada por un único valor de fase para una señal de banda ancha [20].. Figura 1.4. Métodos de estimación AOA. (a) El AOA es estimado de las diferencias en los TOA entre elementos sensores dentro del nodo; se muestra un arreglo de cuatro elementos en forma de Y. (b) El AOA puede ser también estimado de la razón. entre antenas direccionales.. Un segundo modo de estimación del AOA emplea la razón entre los parámetros RSS de dos o más antenas direccionales colocadas en el nodo sensor (figura 1.4b). Dos de ellas, apuntadas en diferentes direcciones tal que sus lóbulos principales se superpongan, pueden ser usadas para estimar el AOA a través de la razón de los valores de sus RSS individuales. Ambas formas de estimar el AOA requieren múltiples elementos de antenas, lo que aumenta el costo y el tamaño del dispositivo sensor. Sin embargo, la disponibilidad de ancho de banda y la caída de los costos de manufactura para frecuencias de longitudes de onda milimétricas, pueden hacer a los arreglos de antenas de RF ideales para las aplicaciones de redes de sensores [23]. A. Principales fuentes de error y modelo estadístico Las mediciones AOA son afectadas por las mismas fuentes de error que las de tipo TOA: ruido aditivo y multitrayecto. Las mediciones AOA resultantes son modeladas típicamente.
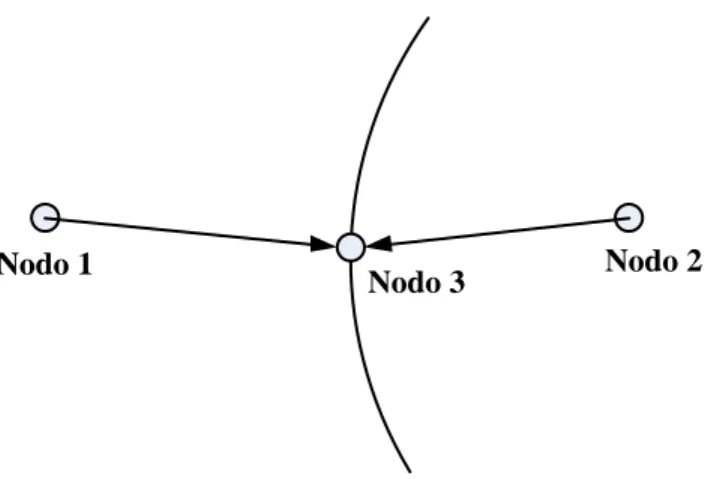
(30) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 19. como gaussianas, con valor esperado igual al ángulo real hacia la fuente y desviación estándar. . Resultados teóricos para mediciones AOA de tipo acústicas muestran límites. estándares de desviación del orden de. a. , dependiendo del rango [34].. Errores de estimación AOA de tipo RF del orden de. han sido reportados usando el. método de la razón RSS [35]. B. Calibración y sincronización No es común que los sensores sean ubicados con orientación conocida. Cuando los nodos tienen direccionalidad, el problema de localización debe extenderse para considerar la orientación de cada nodo como un parámetro desconocido a ser estimado junto con la posición. Los modelos presentados a continuación son suficientes para hallar límites en el comportamiento de la localización cuando se trata de localización cooperativa. Estos límites no son una función del algoritmo de localización particular empleado. 1.2.2.4 Diferencia de tiempo de llegada (TDOA) La diferencia entre los tiempos de llegada de la misma señal a dos sensores diferentes es llamada diferencia de tiempo de llegada (TDOA, del inglés time difference of arrival). En ausencia de sincronización entre el nodo objetivo y los nodos de referencia, la estimación TDOA puede realizarse si hay sincronización entre los nodos de referencia [16], y determina la posición del nodo objetivo en una hipérbola, con el foco en los dos nodos de referencia, como se muestra en la figura 1.5. Una medición TDOA no depende del sesgo del reloj del sensor que transmite. Un modo de obtener la TDOA es estimar en un primer paso el TOA para la señal que viaja entre el nodo objetivo y los nodos de referencia, y entonces obtener la diferencia entre estos estimados. Por consiguiente, los estimados TDOA pueden obtenerse como el , donde. y. (1.4). denotan los estimados TOA de la señal que viaja entre el nodo objetivo y los. nodos de referencia 1 y 2 respectivamente. Otro acercamiento a la estimación de TDOA es realizar cros-correlaciones de la señal que.
(31) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 20. viaja entre el nodo objetivo y los nodos de referencia, y calcular el retraso correspondiente al mayor valor de la cros-correlación [20].. Nodo 1. Nodo 3. Nodo 2. Figura 1.5. Una medición TDOA define una hipérbola que pasa a través del nodo objetivo con focos en los nodos de referencia.. Durante décadas, los métodos TDOA se han usado en la localización para determinar la posición de transmisores asincrónicos; ellos encuentran aplicación en sistemas de posicionamiento global (GPS, del inglés global positioning system) y localización celular. Bajo ciertas condiciones, se ha mostrado que el TOA con el sesgo del reloj tratado como un parámetro desconocido es equivalente al TDOA [36]. 1.2.2.5 Esquemas híbridos relacionados con la posición En algunos sistemas de posicionamiento, dos o más parámetros relativos a la posición, como los estudiados, pueden emplearse para obtener más información sobre la posición del nodo objetivo. Los ejemplos de tales esquemas híbridos incluyen posicionamientos de tipo TOA/AOA, TOA/RSS, TDOA/AOA, TOA/TDOA [20]. 1.2.3. Localización cooperativa en redes inalámbricas. Existen muchas aplicaciones, como las ya mencionadas al inicio del epígrafe 1.2, que no pueden implementarse con las técnicas tradicionales de localización, debido a que estas conllevan, por lo general, altos costos y gran consumo de energía. Incluir, por ejemplo, un receptor de GPS en cada dispositivo, es inviable desde los puntos de vista de costo y energía para muchas aplicaciones, y además está limitado a aplicaciones exteriores. Por.
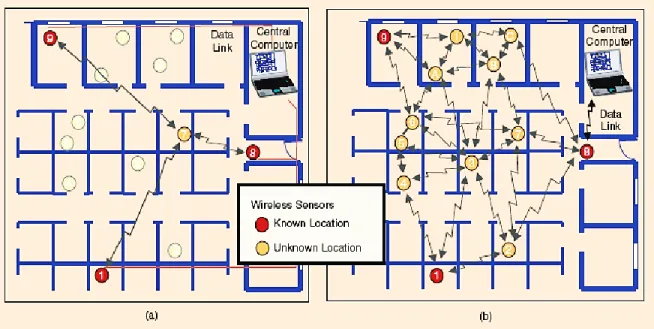
(32) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 21. otro lado, muchos de los sistemas de posicionamiento local (LPS, del inglés local positioning system) se basan en el despliegue de costosas estaciones de alta capacidad en cada área de cobertura [37].. Figura 1.6. (a) Nodos de posición desconocida realizan mediciones solo con nodos de posición conocida (multilateración o multiangulación). (b) Las mediciones pueden ser realizadas entre cualquier par de nodos (localización cooperativa).. Es así que se considera la situación en la que un número pequeño de nodos, llamados nodos de referencia, obtienen sus coordenadas (vía GPS o del sistema administrador durante el inicio) y el resto de los nodos, de posición desconocida, deben determinar sus propias coordenadas. Si el ahorro de energía no fuera un problema a considerar, los nodos de posición desconocida podrían realizar transmisiones de alta potencia y hacer mediciones directamente con los nodos de referencia, y otras técnicas de posicionamiento podrían ser aplicadas (1.6a). Sin embargo, si la red inalámbrica implementara técnicas de localización cooperativa (figura 1.6b), en lugar de resolver la posición de cada nodo, una a la vez, se estimarían las posiciones de todos los nodos de forma simultánea (figura 1.7). Es decir, en la localización cooperativa no solo se permite la realización de mediciones entre dispositivos de posición desconocida y nodos de referencia, sino que también se admiten estas mediciones cuando las realizan dispositivos de localización desconocida entre sí. La información adicional que aporta este último tipo de mediciones mejora significativamente el comportamiento y la robustez del sistema de localización [23]..
(33) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 22. Figura 1.7. Localización cooperativa es equivalente a encontrar el punto de equilibrio de (a) carretes de hilo conectados por una red de (b) muelles. Primero, los nodos de referencia son fijados a sus coordenadas conocidas en el tablero. Los muelles tienen una longitud natural igual a los rangos medidos y pueden ser comprimidos o estirados. Ellos son conectados al par de carretes cuyas mediciones representa. Luego de dejar libre el sistema, el (c) punto de equilibrio representa un estimado de mínima energía; las posiciones reales de los nodos están representadas por “⊗”.. 1.3 Cota de Cramér-Rao (CCR) En estadística, la cota de Cramér-Rao (CCR) o cota inferior de Cramér-Rao, llamada así en honor a Harald Cramér y Calyampudi Radhakrishna Rao, expresa un límite inferior para la varianza de un estimador insesgado, basado en la información de Fisher [23]. También se le conoce como desigualdad de Cramér-Rao o desigualdad de información. 1.3.1. Conceptos básicos. La teoría de la estimación es la rama del procesamiento de señales y la estadística, que estudia las técnicas utilizadas para proporcionar un valor aproximado a un parámetro o variable desconocida, a partir de datos empíricos o medidas. Un estimador consiste en una función de estos datos empíricos, que se utiliza para generar la medida o del valor de la variable desconocida utilizando algún criterio. El estimador puede interpretarse como un instrumento de medida del valor que toma el parámetro, el cual puede ser determinista o aleatorio:.
(34) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 23. Determinista: ej.: cuando se quiere estimar la media de una variable aleatoria, utilizando un número de realizaciones de la misma. Aleatorio: ej.: la fase desconocida de una señal sinusoidal. Las señales observadas son realizaciones de una señal aleatoria, cuya fase instantánea depende de una variable aleatoria, normalmente con distribución uniforme en [0, 2π). Los datos se generan atendiendo a la función de densidad de probabilidad (f.d.p.) y tienen, por tanto, carácter aleatorio. A su vez, como el estimador es una función de los datos (. de un parámetro desconocido. ), tiene también carácter aleatorio (función de un vector. aleatorio), independientemente de si el parámetro es determinista o aleatorio, y se puede caracterizar también por su función de densidad de probabilidad,. [38].. Por otro lado, todo proceso de medición está sujeto a errores debido a factores como: Defectos en el diseño del instrumento de medida: que pueden dar lugar a errores sistemáticos. Ej.: voltímetro mal calibrado. No es posible obtener datos exactos: ej.: al medir una señal contaminada con ruido, o al medir con un voltímetro real, que se comporta como una carga para el circuito en el que se mide. No se dispone de suficientes datos: porque no es posible obtenerlos, o porque no es práctico. Ej.: estimación de la intención de voto en base a resultados de encuestas (es imposible encuestar a toda la población). Debido a la imposibilidad de evitar completamente los errores, para el proceso de medición o estima se busca diseñar instrumentos de medida donde la influencia de los mismos sea pequeña, siendo los mejores instrumentos aquellos en los que esta influencia llega a ser mínima. 1.3.2. Calidad de los estimadores. Para evaluar el comportamiento de los estimadores en cuanto a los errores que ellos arrojan se utiliza una serie de parámetros [38]. Error de estimación: es el error que se comete al estimar el valor del parámetro desconocido. mediante el estimador :.
(35) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 24 (1.5). Como el estimador tiene carácter aleatorio (el parámetro puede ser aleatorio o determinista), el error de estimación es una variable aleatoria y podría caracterizarse estadísticamente por su f.d.p. Sesgo o bias: se define como el valor medio del error de estimación, o la diferencia entre la media del estimador y el valor medio del parámetro a estimar: (1.6) El sesgo aporta una idea del error sistemático cometido en la estimación, no así sobre la dispersión de los resultados de este proceso. Un estimador insesgado es aquel en el que el sesgo es nulo; es decir, la media del estimador coincide con el valor medio del parámetro, ). Un. si este es aleatorio, o con el valor real del parámetro, si es determinista (. estimador asintóticamente insesgado es aquel cuyo sesgo tiende a cero cuando el tamaño de la muestra tiende a infinito (. ).. Varianza del estimador: es una medida de la dispersión de las estimaciones con relación al valor medio de las mismas: (1.7) Valor cuadrático medio del error: ofrece de forma conjunta información sobre el valor medio del error y la dispersión del mismo: .. (1.8). Eficiencia: un estimador es más eficiente y preciso en la medida que su varianza sea menor. El estimador para el que la varianza se hace mínima se denomina estimador de mínima varianza. Si el estimador es insesgado y de mínima varianza, recibe el nombre de estimador insesgado de mínima varianza. Consistencia: un estimador consistente es un estimador asintóticamente insesgado cuya varianza tiende a cero al aumentar el tamaño muestral (. )..
(36) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.3.3. 25. Cota de Cramér-Rao. Se llama cantidad de información de Fisher dada por una muestra aleatoria sobre el parámetro. a la cantidad [39-41]: ,. donde. (1.9). es la f.d.p. conjunta de la muestra.. Si el dominio de x no depende de , entonces [39]: .. (1.10). (1.9) y (1.10) son equivalentes si se satisfacen las condiciones modificadas de regularidad (estas pueden ser estudiadas en [40]). Cuando se cumplen las condiciones de regularidad (estudiadas más adelante) la cota de Cramér-Rao establece el límite inferior para la varianza de un estimador insesgado y se define como [40]: ,. (1.11). Según [39], si la información de Fisher está dada por una variable aleatoria independiente de tamaño , (1.11) queda de la forma: .. (1.12). Cuando no se cumplen las condiciones de regularidad [41] ni tampoco las condiciones modificadas particulares de regularidad, la cota estará expresada en su forma más general, en la que no se ha tenido en cuenta la independencia de la variable aleatoria del parámetro a estimar. El estimador cuya varianza sea igual al límite de Cramér-Rao será un estimador eficiente. En algunos casos, no existe un estimador insesgado que alcance la cota inferior [40]. A. Condiciones de regularidad Para determinar la cota de Cramér-Rao se establecen determinadas condiciones de existencia y convergencia de determinadas funciones [41-43], que se denominan condiciones de regularidad:.
(37) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1. La información de Fisher está definida. Para todo. 26 , tal que. ,. es finito. 2. Las operaciones de integración con respecto a x y de diferenciación con respecto a θ pueden intercambiarse en la esperanza de . Es decir, (1.13) siempre que el miembro derecho de la ecuación sea finito. Este intercambio de operaciones es posible si el campo de variación de la variable aleatoria no depende del parámetro que se trata de estimar ( ) [40]. En algunos casos, un estimador sesgado puede tener tanto varianza como error cuadrático medio por debajo de la cota inferior de Cramér-Rao (la cota inferior dada aquí se aplica solo a estimadores insesgados) (ver expresión 27 de [40] para cota de un estimador sesgado). B. Parámetros múltiples Extendiendo la cota de Cramér-Rao para múltiples parámetros, se define el vector columna de parámetros. , con función de densidad de probabilidad que. satisface las condiciones de regularidad definidas anteriormente. La matriz de información de Fisher (FIM, del inglés Fisher information matriz) es una matriz de dimensión. x. elementos definidos según [44]: .. Si. (1.14). es un estimador insesgado, entonces, la cota de Cramér-Rao para parámetros. múltiples es .. (1.15). Para una mejor comprensión del epígrafe 1.3, en el anexo I se muestran ejemplos resueltos sobre el cálculo de la cota de Cramér-Rao (tomados de [45])..
(38) CAPÍTULO 2. EFECTOS DE LA LOCALIZACIÓN Y SU EXACTITUD EN EL DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA. CAPÍTULO 2. EFECTOS. DE. LA. LOCALIZACIÓN. Y. 27. SU. EXACTITUD EN EL DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA. Como se estudió en el epígrafe 1.1, la radio cognitiva ha tenido un impacto positivo en la eficiente explotación del espectro de radiofrecuencias. Para que usuarios de CR puedan transmitir en presencia de un sistema primario empleando sus mismos recursos espectrales y a la vez aplicar con efectividad la política de no interferencia, se emplean las llamadas técnicas de acceso oportuno al espectro [46], según las cuales los nodos de radio cognitiva deben sensar continuamente los espectros de banda ancha [11, 15, 47], identificar el uso que el usuario primario da al mismo en términos de ubicación y tiempo [48], y por último calcular las oportunidades de compartir el espectro a través del ajuste de sus parámetros de transmisión [49] sin que exista la posibilidad de afectar al sistema primario (por ejemplo, cuando el sistema primario no está transmitiendo). Sin embargo, este sensado continuo requiere un procesamiento de señal sofisticado y de alto consumo de energía [50], por lo que ha surgido la interrogante de si es posible realizar esta reutilización de frecuencias sin incurrir en estos gastos de tiempo y energía. La respuesta a esta problemática la proporciona un análisis sencillo. Si el usuario de CR que va transmitir conociera la región donde puede hacerlo sin interferir al enlace basado en infraestructura, podría reutilizar el espectro evitando el costoso sensado del mismo. Obviamente, delimitar esta región resulta complejo cuando la misma está dentro de la zona de cobertura del usuario primario, ya que cuando el sistema de CR esté suficientemente lejos de la red primaria, ambos pueden transmitir en la misma frecuencia sin interferirse mutuamente. Por supuesto, para hallar esta región de transmisión concurrente, es.
(39) CAPÍTULO 2. EFECTOS DE LA LOCALIZACIÓN Y SU EXACTITUD EN EL DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA. 28. fundamental el conocimiento de la localización de los restantes nodos de la red híbrida por parte del usuario de CR transmisor, por lo que se hace necesario el uso de un sistema de localización, que se base en una de las técnicas estudiadas en el epígrafe 1.2 o alguna de sus combinaciones. Intuitivamente, se puede apreciar que esta forma de reutilizar el espectro será más efectiva en la medida en que la región estimada coincida con la verdadera región de útil aprovechamiento para la transmisión cognitiva, lo que dependerá a su vez de la fidelidad de la técnica de localización empleada para el cálculo de las posiciones de los nodos de la red híbrida. Es por ello que se hace necesario un análisis de la exactitud de las principales técnicas de localización existentes, realizado en el epígrafe 2.2 de este capítulo. En el epígrafe 2.1 se hace un estudio sobre la probabilidad de transmisión concurrente de dos enlaces (primario y secundario) sin tener en cuenta la inexactitud de las técnicas de localización empleadas (2.1.1), además de un análisis similar considerando dicha inexactitud (2.1.2). 2.1. Impacto de la localización y su exactitud en la reutilización del espectro radioeléctrico. El objetivo principal de este epígrafe es proporcionar la idea de la utilización del conocimiento de la localización para facilitar la reutilización de frecuencias de transmisión de manera concurrente, además de hacer un estudio del impacto de su inexactitud sobre esta reutilización del espectro. Específicamente se muestra que un dispositivo de CR que tiene la información de la localización exacta de los restantes nodos de un sistema híbrido puede transmitir concurrentemente los datos en presencia de un sistema basado en infraestructura en determinada región dentro de su área de cobertura, a través del establecimiento de un enlace de tipo ad hoc (enlace de tipo punto a punto entre dispositivos a través de las señales de radio sin usar un punto de acceso o AP). También se calcula dicha región para los usuarios secundarios en los casos ideal (sin errores en la localización) y real (localización inexacta). Nótese que el área de transmisión concurrente es equivalente a una región donde no es necesario el sensado del espectro. No obstante, este procedimiento de sensado sigue siendo necesario, aunque solo cuando el usuario de CR está fuera de la región de.
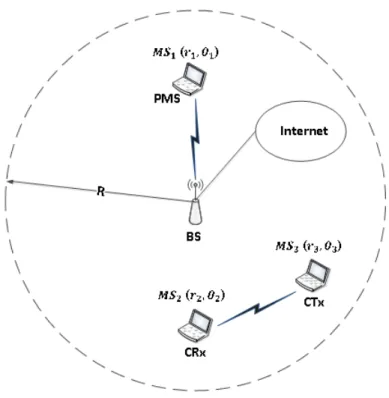
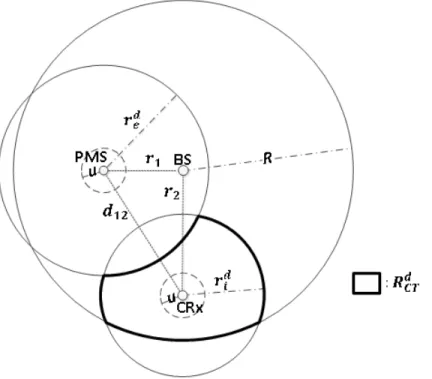
(40) CAPÍTULO 2. EFECTOS DE LA LOCALIZACIÓN Y SU EXACTITUD EN EL DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA. 29. transmisión coexistente. Por consiguiente, el consumo de energía de los sistemas de CR con la capacidad del conocimiento de la localización puede reducirse significativamente [51]. 2.1.1. Escenario del sistema y definición de parámetros. La figura 2.1 muestra la coexistencia de un sistema primario compuesto por un estación base (BS, del inglés base station) o punto de acceso (AP, del inglés access point) y la estación móvil (MS, del inglés mobile station) número 1, y dos dispositivos móviles de CR,. y. , llamada PMS (primary MS),. , denominados CTx y CRx (transmisor y. receptor de CR), que intentan establecer una conexión de tipo ad hoc entre sí. están ubicados en las coordenadas (. ), (. ) y (. ,. y. ), respectivamente,. tomando como referencia a la BS. Se considera que todos los dispositivos móviles tienen potencias de transmisión similares.. Figura 2.1. Escenario que muestra la coexistencia de dos dispositivos de CR (CTx y CRx) estableciendo un enlace ad hoc, y un usuario primario (PMS) conectado a la red basada en infraestructura. Todos los dispositivos móviles usan el mismo espectro simultáneamente.. El área de cobertura de la BS es. . Se supone por ahora, para simplificar el. análisis, que las técnicas de localización empleadas están exentas de errores y por tanto las posiciones obtenidas a través de las mismas son iguales a las ubicaciones reales de los.
(41) CAPÍTULO 2. EFECTOS DE LA LOCALIZACIÓN Y SU EXACTITUD EN EL DESEMPEÑO DE LAS REDES DE RADIO COGNITIVA. 30. dispositivos. Se supone además, que los dispositivos móviles se mantienen fijos y que, como se explicó anteriormente, son capaces de obtener sus posiciones absolutas o relativas a la BS, siendo esta información transmitida entre ellos. Bajo estas condiciones, las ubicaciones reales del CRx y la PMS son conocidas por el CTx (en el epígrafe siguiente se hace un estudio similar teniendo en cuenta el error en la estimación de la posición). Aunque esta estimación de la posición conlleva gastos de tiempo y energía, no es necesario realizarla para cada transmisión, sino solo cuando un nuevo nodo se agrega a la red o algún nodo cambia su posición. Por demás, la información de localización queda almacenada en el dispositivo, lo cual hace que, comparado con el sensado de espectro para cada transmisión, el consumo de energía y el espacio de memoria debido al posicionamiento y actualización de la posición sean relativamente pequeños. Basado en el protocolo de control de acceso al medio (MAC, del inglés medium access control) acceso múltiple por detección de portadora con evasión de colisión (CSMA/CA, del inglés carrier sensemultiple access with collision avoidance) múltiples usuarios compiten por el canal, y solo una estación móvil dentro del área de cobertura de la BS puede establecer un enlace de comunicación basado en infraestructura en cada instante de tiempo. Para establecer una conexión extra en la misma banda de frecuencias que el usuario primario, un usuario secundario debe asegurarse de que la calidad del actual enlace primario no va a degradarse, además de ganar la disputa con otros usuarios ilegítimos por el uso del canal. Basado en la consideración de que los usuarios primario y secundario tienen la misma potencia de transmisión, es razonable asumir que solo un usuario no autorizado puede establecer un enlace en cada momento debido al rango de interferencia similar [51]. Si se denota. y. como las relaciones señal a interferencia (SIR, del inglés signal-. to-interference ratio) de los enlaces de infraestructura y ad hoc respectivamente, se puede definir la probabilidad de transmisión concurrente (. ) de los sistemas primario y. secundario como: , donde. y. (2.1). son los umbrales de SIR requeridos para los enlaces primario y secundario. respectivamente. Si se quiere obtener la región de transmisión concurrente, es fundamental calcular la probabilidad de coexistencia de ambos enlaces. Si la calidad del enlace del.
Figure
+7
Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
Un sistema de radio definida por software SDR (Software-Defined Radio) es un transmisor de comunicación inalámbrica que utiliza software para implementar los algoritmos
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
información que el individuo puede procesar por su sistema nervioso, y los factores relacionados van a influir en las habilidades y destrezas sociales, que pondrá al uso al
Para denegación hegeliana del mal: «Así como no existe lo fal- so, no existe el mal, es objetada primero por Sade y luego por la subjetividad romántica: en la mé- dula de la
