Control digital de posición y velocidad de máquinas de corriente directa
85
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control Digital de Posición y Velocidad de Máquinas de Corriente Directa. Autor: Yasser Dughman Cabrera [email protected]. Tutor: Dr. José Rafael Abreu García Departamento de Automática y Sistemas Computacionales FIE UCLV [email protected]. Santa Clara Año 2016 "Año 58 del triunfo de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Escriba aquí el texto del pensamiento (Opcional).
(5) ii. DEDICATORIA. Escriba aquí el texto de la dedicatoria (Opcional).
(6) iii. AGRADECIMIENTOS. Escriba aquí el texto de los agradecimientos (Opcional).
(7) iv. TAREA TÉCNICA. 1. Análisis de la bibliografía necesaria sobre control digital. 2. Análisis de las estructuras básicas de lazos de control de posición y velocidad con máquinas de corriente directa. 3. Tipos de acciones de control más idóneas para el control de máquinas de corriente directa. 4. Digitalización de los diferentes componentes de los lazos de control. 5. Aplicación y determinación de los ajustes más adecuados mediante diferentes algoritmos de ajuste de los parámetros de controladores.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. Los accionamientos basados en motores de corriente directa son de amplia utilización en la práctica diaria. Las exigencias de su respuesta difieran de los procesos tanto en su estado transitorio como estable. Por ello es importante analizar cuales son. las. estructuras y los métodos de ajuste de los controladores de velocidad con el fin de cumplir con los requerimientos establecidos para ellos. En el trabajo se analizan diferentes estructuras de control y métodos de ajustes de los parámetros del controlador digital de velocidad. Bajo criterios de operación dados y posibilidades de cumplimentar las exigencias se determina cual es la estructura más adecuada para un fin específico. También se obtiene expresiones matemáticas que son utilizadas en tres casos de estudio con datos prácticos y se determinan los valores de los ajustes de parámetros del controlador que optimizan la respuesta de accionamientos ante entrada tipo escalón tanto con acciones P como PI. Mediante la simulación de los casos de estudio se comprueban los resultados obtenidos..
(9) vi. TABLA DE CONTENIDOS PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 2 CAPÍTULO 1.. Estructuras básicas de control de motores de corriente directa con. excitación independiente......................................................................................................... 5 1.1. Introducción ............................................................................................................. 5. 1.2. Modelo dinámico del motor de corriente directa con excitación independiente. .... 6. 1.3. Control en lazo cerrado de velocidad o posición de un motor de corriente directa. con excitación independiente. ............................................................................................. 9 1.3.1. Estructura en lazo cerrado para el control directo de posición y velocidad. .. 10. 1.3.2. Control en cascada con lazo interno de corriente o momento ........................ 11. 1.3.3. Estructura con acción de control en la retroalimentación .............................. 12. 1.3.4 Esquema basado en el Principio de Modelo Interno para perturbaciones. ............ 13 1.3.5. Esquema con Compensación “Feedforward” ................................................. 14. Conclusiones del capítulo……………………………………………………………15. CAPÍTULO 2.. Análisis de las estructuras más utilizadas…………………………… 16. 2.1. Introducción. .......................................................................................................... 16. 2.2. Análisis de la estructura en lazo cerrado para el control directo de la velocidad. . 16.
(10) vii 2.3. Control en cascada con lazo interno de corriente................................................... 21. 2.4. Control relocalizando el efecto proporcional .................................................. 29. 2.5. Estructura basada en el funcionamiento del Modelo Interno para perturbaciones .... 34. 2.6. Compensación “Feedforward” ........................................................................ 36. Conclusiones del capítulo………………………………………………………………………………………………38. CAPÍTULO 3.. Control digital de máquinas de corriente directa ..................................... 39. 3.1. Introducción ........................................................................................................... 39. 3.2. Métodos de diseño.................................................................................................. 40. 3.3. Implementación del control digital a motores de corriente directa con. excitación independiente............................................................................................... 42 3.4. Implementación de control de velocidad con acción proporcional ........................ 45. 3.5. Implementación de control de velocidad acción Proporcional Integral ................. 48 Simulaciones .......................................................................................................... 59 Conclusiones del capítulo ...................................................................................... 61. CONCLUSIONES Y RECOMENDACIONES ................................................................... 62 Conclusiones ..................................................................................................................... 62 Recomendaciones ............................................................................................................. 62 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 63 ANEXOS .............................................................................................................................. 65 Anexo I El diagrama de simulación SCDMCD............................................65 Anexo II Diagrama de simulación en simulink SCDMCD1............................................66 Anexo III Diagrama SCDMCD2………………………………………………………… 68 Anexo IV Diagrama SCDMCD3………………………………………………………… 70.
(11) viii. Anexo V Diagrama SCDMCD4………………………………………………………… 72.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. Los accionamientos eléctricos basados en motores de corriente directa son de utilidad en la práctica industrial por su precisión en el control de velocidad y posición y aunque los motores son de mayores dimensiones que los de corriente alterna su control resulta más simple y por lo tanto más económico. El desarrollo de la electrónica digital ha permitido los avances en el control digital de motores de corriente directa. Los avances tecnológicos han conducido a la creación de circuitos integrados que pueden reducir el tamaño y aumentar la eficiencia de los sistemas de control especializados. Las aplicaciones de sistemas de control basados en procesadores digitales de señales (DSPs) en diseños de electrónica de potencia son un ejemplo excelente (Gonzalez G.N., Bosso J.E. 2012). La principal ventaja con este tipo de dispositivo es que puede reemplazarse hardware por software sin incrementar el costo, además de permitir la programación en lenguajes de alto nivel. Otras características importantes son: unidades de bajo costo, reducción en el tamaño del equipo, incremento en la flexibilidad de las aplicaciones, reducción en el consumo de energía y gran velocidad de procesamiento..
(13) INTRODUCCIÓN. 2. Para el presente trabajo se propone como objetivo general: Determinar, entre las diferentes variantes de estructuras y de métodos de sintonización de lazos de control digitales los más adecuados para aplicarlos a los accionamientos eléctricos de posición y velocidad.. Se proponen como objetivos específicos: 1. Caracterizar los lazos de control, necesario para la automatización de las variables principales de los accionamientos eléctricos. 2. Obtener las formas digitalizadas de los diferentes componentes de los lazos de control de los accionamientos eléctricos incluyendo sus variantes aproximadas. 3. Determinar los ajustes óptimos de acuerdo a criterios específicos para los accionamientos eléctricos. Con este proyecto se pretende ofrecer a los ingenieros en automática un criterio acerca de cuales estructuras y algoritmos de ajustes de controladores digitales son más idóneos para la aplicación al control de posición y velocidad de motores de corriente directa. La ejecución exitosa de este trabajo permita disponer de herramientas teóricas debidamente fundamentadas que apoyarán la gestión de los ingenieros en Automática a la hora de diseñar e implementar sistemas de control de posición y velocidad utilizado máquinas de corriente directa. Los resultados de investigación poseen una aplicación práctica y teórica de gran trascendencia para todos los especialistas, investigadores y diseñadores de.
(14) INTRODUCCIÓN. 3. sistemas de control de posición y velocidad utilizando máquinas de corriente directa. Organización del informe Para el desarrollo del trabajo se debe partir de una amplia revisión de la bibliografía existente, apoyados en criterios específicos acerca de la respuesta que debe obtenerse de sistemas de control de posición y velocidad de máquinas de corriente directa. El análisis de la bibliografía se probará mediante simulación los esquemas más utilizados determinando cuales son desde el punto de vista técnico y económico los más idóneos. La determinación de los parámetros de sintonización aplicando diferentes algoritmos se realizará para los esquemas más adecuados determinados, esto se implementará mediante la simulación. El informe de la investigación se estructurará, en resumen, introducción, capitulario, conclusiones, referencias bibliográficas y/o bibliografía y anexos. En la introducción se dejará definida la importancia, actualidad y necesidad del tema que se aborda y se dejarán explícitos los elementos del diseño teórico..
(15) INTRODUCCIÓN. 4. Capitulario CAPÍTULO I: Se dedicará a la caracterización de las estructuras más utilizadas en el control de motores de corriente directa y al estudio comparativo de ellas. CAPÍTULO II: Se utilizará para expresar el análisis de las diferentes estructuras de lazos de control determinando bajo criterios técnicos económicos las más adecuada para la aplicación específica. CAPÍTULO III: Se dedicará al análisis de las diferentes variantes algorítmicas para la selección de los ajustes más adecuados para el control de motores de corriente directa realizando la validación mediante simulación de las diferentes estructuras y controladores digitales obtenidos.. Conclusiones Recomendaciones Referencias bibliográficas y/o Bibliografía Anexos.
(16) CAPÍTULO 1. Revisión bibliográfica. CAPÍTULO 1. Estructuras Básicas de control de motores de corriente directa con excitación independiente.. 1.1 Introducción Los motores de corriente directa son insuperables para aplicaciones en las que debe ajustarse la velocidad, así como en las aplicaciones en las que se requiere un par grande. En la actualidad se utilizan millones de motores de corriente directa cuya potencia es una fracción de kilowatts, en automóviles trenes y aviones, donde impulsan ventiladores de diferentes tipos para aparatos de aire acondicionado, calentadores y equipos de descongelación; también mueven los limpiadores de parabrisas y accionan los elevadores de asientos y ventanas. Los de mayor potencia se utilizan en vehículos sin tripulación, submarinos, aviones, montacargas etc. También son muy útiles para arrancar motores de gasolina y diesel en autos, camiones, autobuses, tractores y lanchas. La principal desventaja de estos motores estriba en sus escobillas y en su colector. El motor de corriente directa tiene un estator y un rotor; este último es más conocido como armadura. El estator contiene uno o más devanados por cada polo, los cuales están diseñados para llevar corrientes directas que establecen un campo magnético. La armadura y sus devanados conducen corriente, desarrollándose un momento que hace girar al motor. Hay un conmutador conectado al devanado de la armadura, de manera que bajo cualquier polo del estator, circule siempre la corriente en el mismo sentido, sin importar la posición. Para aplicaciones generales, los motores de corriente (Aller Castro J.M, 2006) se clasifican como de excitación serie, de excitación paralelo y de excitación independiente, todos los cuales se refieren a la manera en que se excita el campo magnético. Sin embargo las características de los dos primeros tipos de motor. 5.
(17) CAPÍTULO 1. Revisión bibliográfica. son especialmente no lineales, de manera que para aplicaciones de sistemas de control, el más usado es el motor de excitación independiente. El motor de corriente directa de excitación independiente se divide en dos grupos, según si la acción de control se aplica a los terminales de la excitación o a los terminales del inducido del motor. Se conocen como controlados por excitación y controlados por inducido, y en ellos normalmente el rotor del motor se considera como inducido. Las aplicaciones más comunes de las máquinas de corriente directa son, control de posición, de velocidad y de momento.. 1.2 Modelo Dinámico del motor de corriente directa con excitación independiente. A partir de las relaciones eléctricas y mecánicas de un motor de corriente directa es posible obtener el modelo (Leonhard, W, 1996).. 𝑉 = 𝑅𝑎 𝐼𝑎 + 𝐿𝑎. 𝑑𝐼 𝑑𝑡. +𝐸. 𝑉 − 𝐸 = 𝑅𝑎 𝐼𝑎 + 𝐿𝑎. (1.1). 𝑑𝐼 𝑑𝑡. 𝑉(𝑠) − 𝐸(𝑠) = 𝑅𝑎 𝐼𝑎 (𝑠) + 𝐿𝑎 𝑆𝐼𝑎 (𝑠). 𝑉(𝑠) − 𝐸(𝑠) = 𝐼𝑎 (𝑠) 𝑅𝑎 + 𝐿𝑎 𝑆. 𝑀𝑒𝑚 = 𝐾𝑇 𝐼𝑎. (1.2). 6.
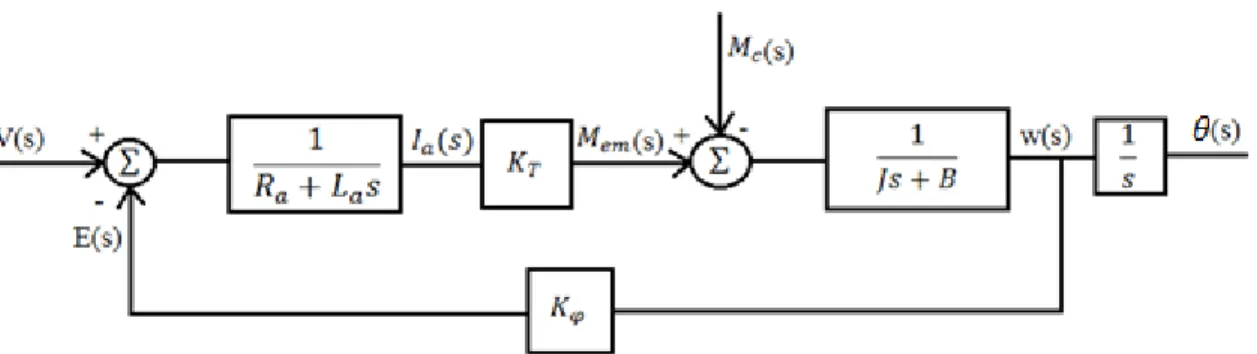
(18) CAPÍTULO 1. Revisión bibliográfica. 𝑀𝑒𝑚 (𝑠) = 𝐾𝑇 𝐼𝑎 (𝑠). 𝑀𝑒𝑚 = 𝐽. 𝑑𝑤 𝑑𝑡. + 𝐵 𝑤 + 𝑀𝑐. (1.3). 𝑀𝑒𝑚 (𝑠) − 𝑀𝑐 (𝑠) = 𝐽 𝑆 𝑤(𝑠) + 𝐵 𝑤(𝑠) 𝑀𝑒𝑚 (𝑠) − 𝑀𝑐 (𝑠) = ( 𝐽 𝑆 + 𝐵 )𝑤(𝑠) 𝑀𝑒𝑚 (𝑠) − 𝑀𝑐 (𝑠) = 𝑤(𝑠) (𝐽𝑆 + 𝐵) 𝐸 = 𝐾𝜑 𝑤 𝐸(𝑠) = 𝐾𝜑 𝑤(𝑠) Donde: V: Voltaje de entrada [V] Ra: Resistencia de armadura [Ω] La: Inductancia de armadura [H] 𝐽: Inercia de las partes rotatorias [Kg.m2] B: Coeficiente de fricción [Kg.m] 𝑀𝑒𝑚 : Momento o torque empleado [N.m] 𝑀𝑐 : Momento de la carga [N.m]. (1.4). 7.
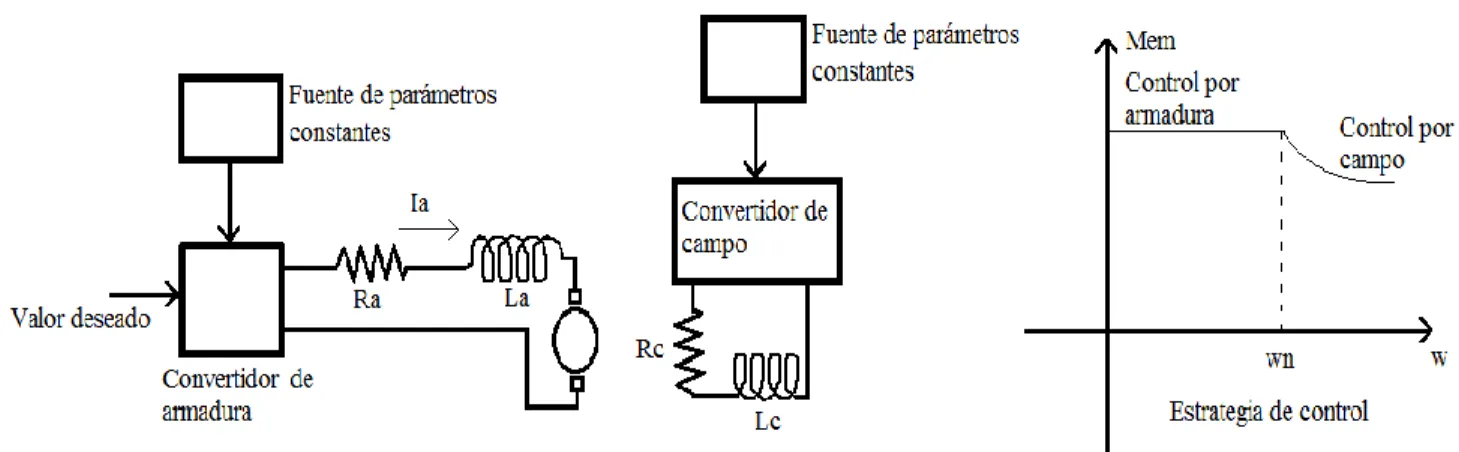
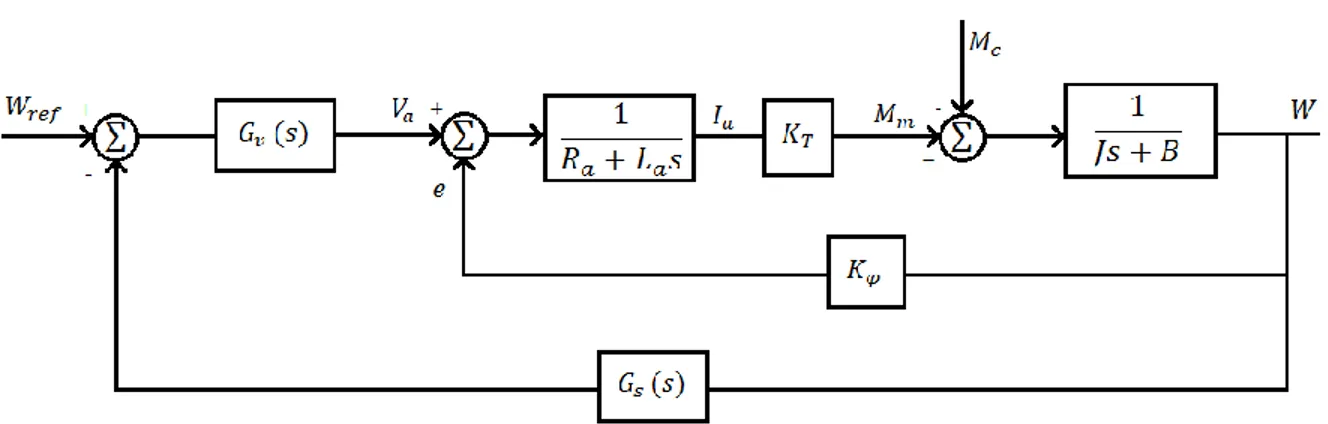
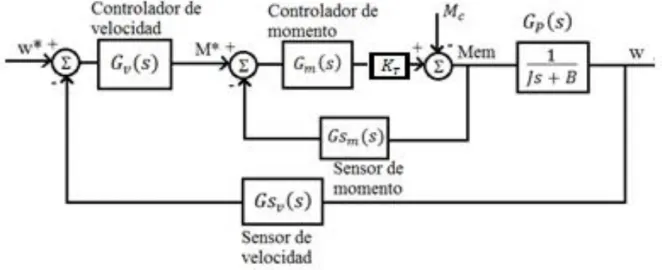
(19) CAPÍTULO 1. Revisión bibliográfica. 𝐼𝑎 : Corriente de armadura [A]. 𝑤 : Velocidad del rotor [rad/s] 𝐾𝑇 y 𝐾𝜑 : Constantes. La figura 1.1 muestra la estructura en lazo cerrado del modelo dinámico del motor. Figura 1.4 Estructura en lazo cerrado del modelo dinámico del motor.. Existen diferentes estrategias para la aplicación del tipo de control del motor, la más utilizada consiste en colocar dos convertidores uno por armadura y otro por campo de manera tal que para velocidades menores que la nominal se controle por armadura o sea a momento constante y por encima de esta controlar por campo o sea a potencia constante (Diaz, J. L, Pardo, A, 2004). La figura 1.2 muestra la estrategia más usada para la aplicación del tipo de control del motor.. 8.
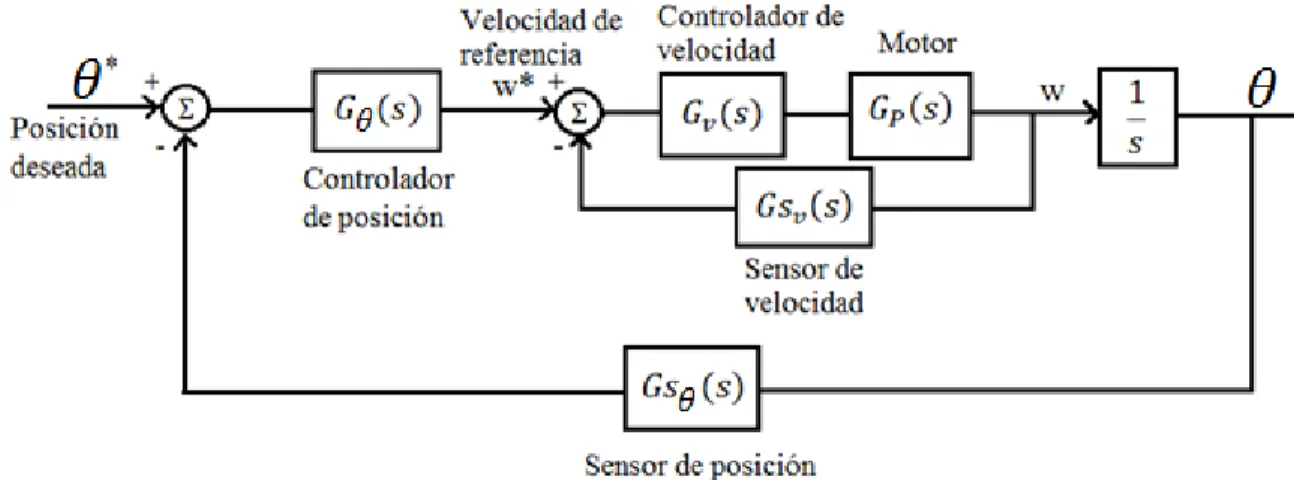
(20) CAPÍTULO 1. Revisión bibliográfica. Figura 1.2 Estrategia para la aplicación del tipo de control del motor.. 1.3 Control en lazo cerrado de velocidad o posición de un motor de corriente directa con excitación independiente. No es posible lograr buenos resultados en aplicaciones de máquinas eléctricas con accionamientos sin que se utilicen técnicas de control en lazo cerrado. Entre las aplicaciones más usadas está el control de velocidad y de posición, utilizando motores de corriente directa de excitación independiente, para lo cual suelen utilizarse diferentes estructuras de control (Vukasavic. S, 2007).. 1.3.1 Estructura en lazo cerrado para el control directo de posición y velocidad. La estructura más sencilla es la que permite controlar el motor con el lazo cerrado de velocidad, que controle el convertidor de armadura, con el objetivo de ajustar la velocidad en el caso que esta sea la variable a controlar o incluir un lazo de control externo para controlar la posición si esta es la variable objeto de control. La figura 1.3 muestra la estructura que cumple con este objetivo. 9.
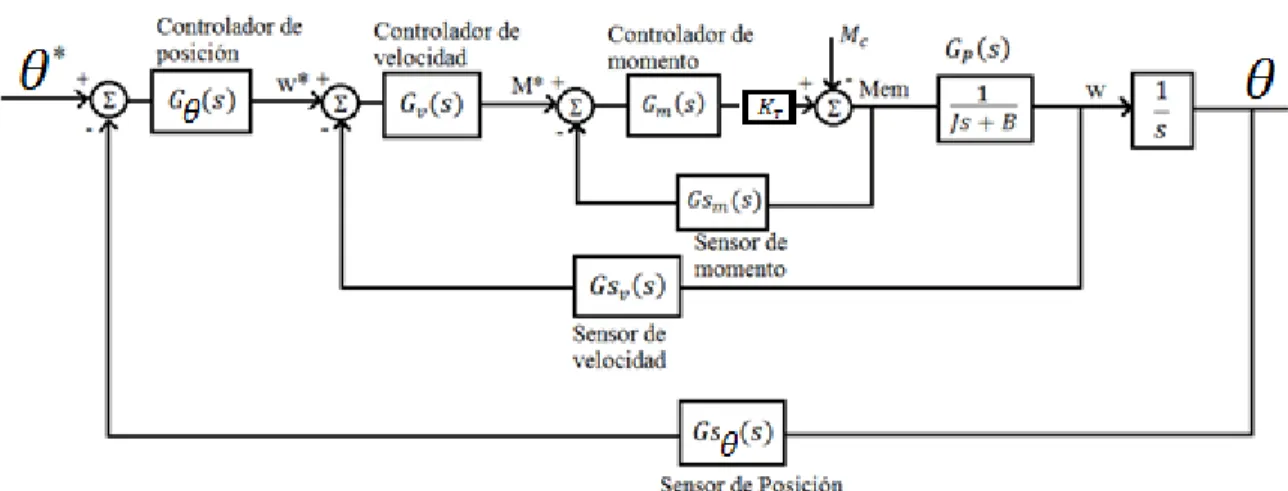
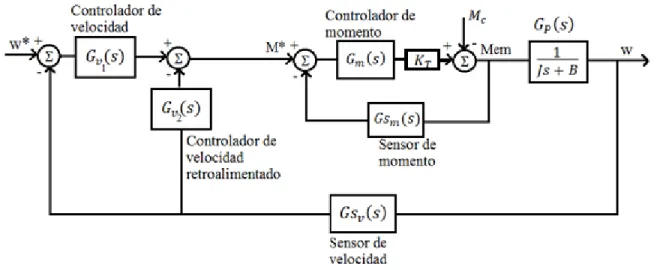
(21) CAPÍTULO 1. Revisión bibliográfica. Figura 1.3 Estructura básica para el control en lazo cerrado del motor.. El controlador de posición genera la entrada de referencia para el lazo de velocidad y el controlador de velocidad a su vez genera los pulsos para que el convertidor entregue al motor el voltaje variable para que cumpla con los objetivos propuestos. Si lo que se desea control es la velocidad se omite el controlador de posición suministrado a la entrada de referencia de la velocidad.. 1.3.2 Control en cascada con lazo interno de corriente o momento. Tanto para el control de posición o de velocidad se conforman estructuras de control de posición o velocidad estableciendo un lazo interno de corriente o lo que es similar de momento (Morrera H. M. 2004). La figura 1.4 muestra el esquema básico de control que se conforma con el lazo interno de momento y dos lazos externos de velocidad y posición respectivamente.. 10.
(22) CAPÍTULO 1. Revisión bibliográfica. Figura 1.4 Esquema de control con lazo interno de momento.. En este esquema como se puede apreciar el controlador de velocidad genera la señal del valor deseado de momento a partir del error de velocidad. El objetivo del lazo interno de momento, como se verá posteriormente es el de minimizar los efectos de disturbios en la carga, evitando afectaciones en la velocidad o la posición controlada.. 1.3.3 Estructura con acción de control en la retroalimentación En oportunidades se encuentran estructuras de control que, con algún objetivo específico, se conforman con acciones de control en el paso directo y al mismo tiempo en la retroalimentación, estas son los denominadas “controladores modificados”.. La figura 1.5 muestra el esquema de control de velocidad con estas características.. 11.
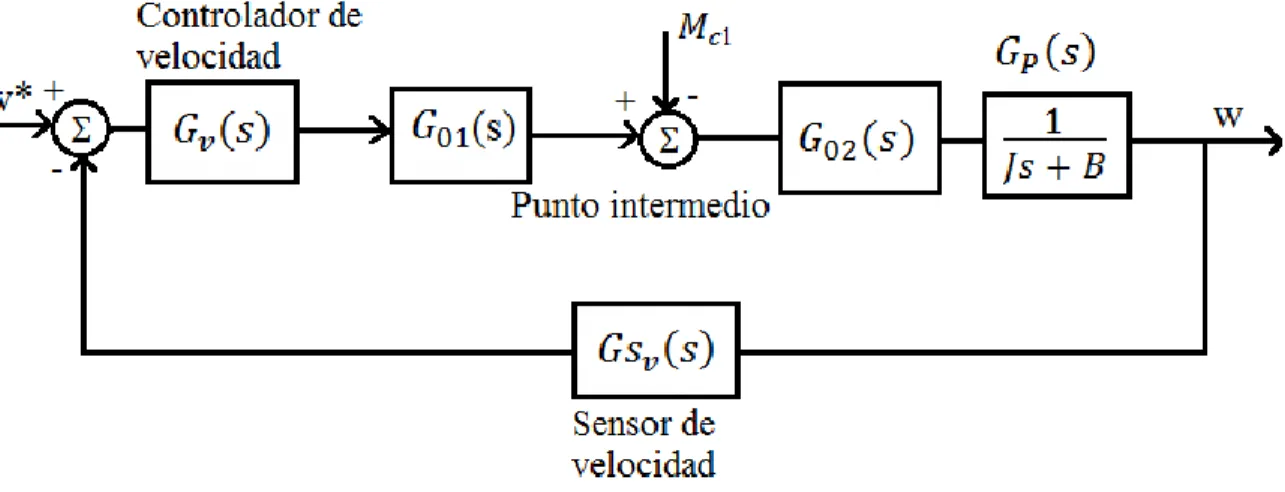
(23) CAPÍTULO 1. Revisión bibliográfica. Figura 1.5 Esquema de control con lazo interno y acción de control proporcional relocalizada.. En dependencia del tipo de objeto a controlar y de la entrada de referencia se encuentran estructura tales como I-P, I-PD,PI-D entre otras posibilidades (Ogata K 2010).. 1.3.4 Esquema basado en el Principio de Modelo Interno para perturbaciones. Esta estructura es utilizada, básicamente, cuando existen disturbios que no pueden ser compensados por otras estructuras, por ejemplo cuando el disturbio se produce en un punto intermedio del proceso (Guadarrama R. et all).. La figura 1.6 muestra el esquema de control de velocidad con el modelo de la perturbación en un punto intermedio del proceso.. 12.
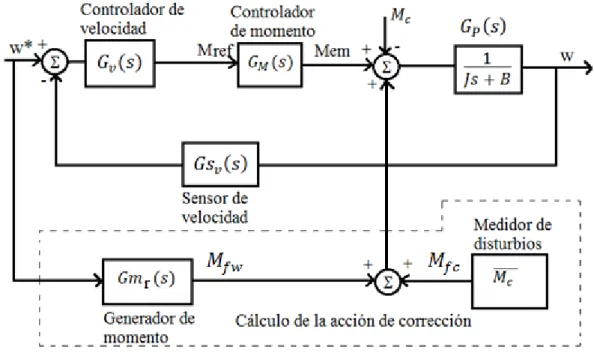
(24) CAPÍTULO 1. Revisión bibliográfica. Figura 1.6 Esquema de control de velocidad con el modelo de la perturbación en un punto intermedio del proceso.. Al diseñar el compensador debe tenerse en cuenta las características de los disturbios que más comúnmente se encuentran en la aplicación específica. Este método de diseño se analizará en el próximo capítulo.. 1.3.5 Esquema con Compensación “Feedforward” Esta estructura es utilizada cuando por algún medio es posible medir o determinar los disturbios, mediante su aplicación es posible eliminar el error en estado estable tanto en el control de velocidad como de posición (Stephanopoulos G. 2001).. La figura 1.7 muestra el esquema de control de velocidad “Feedforward”. 13.
(25) CAPÍTULO 1. Revisión bibliográfica. Figura 1.7 Esquema de control de velocidad “Feedforward”. El disturbio de momento puede ser medido u observado, si es exacto la operación, el momento determinado ̅̅̅̅ 𝑀𝑐 asegura cero error en estado estable en velocidad ante disturbios variables con el tiempo.. Conclusiones del capítulo Se han presentado las estructuras más comunes utilizadas en el control de velocidad o posición mediante la utilización de motores de corriente directa con excitación independiente. Cada una de ellas posee características específicas y por lo tanto su utilización o no dependerá de las objetivos perseguidos en la. 14.
(26) CAPÍTULO 1. Revisión bibliográfica. aplicación conociendo la forma de la entrada, el error permitido, velocidad de respuesta, etc. Esto será el objetivo del próximo capítulo.. 15.
(27) CAPÍTULO 2. Materiales y métodos. 16. CAPÍTULO 2. Análisis de las estructuras más utilizadas. 2.1 Introducción En el capítulo anterior se describieron las estructuras más utilizadas de acuerdo al estado bibliográfico. Estas estructuras son aptas para definir condiciones de operación, tipo de carga y conjuntamente con el ajuste de diferentes acciones de control pueden cumplir en mayor o menor grado con las exigencias operacionales demandadas por una aplicación específica. En el presente capítulo se dedicará al análisis de las estructuras estudiadas buscando como resultado, argumentos que justifiquen la selección de las más adecuadas para una aplicación específica. El análisis se limitará al control de velocidad dado que las relaciones entre esta variable y la posición son independientemente de la estructura.. 2.2. Análisis de la estructura en lazo cerrado para el control directo de la velocidad.. En la figura se muestra el esquema de control de velocidad del motor, en este caso, de forma directa el controlador de velocidad controla el convertidor que regula el voltaje de armadura aplicado al motor, figura (2.1)..
(28) CAPÍTULO 2. Materiales y métodos. 17. Figura 2.1 Esquema simple de control de velocidad del motor.. La función de trasferencia en lazo cerrado teniendo en cuenta todos los elementos considerando solo la entrada de referencia es:. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐=0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). =. 𝐺𝑣 (𝑠)𝐾𝑇 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐺𝑠 (𝑠)𝐺𝑣 (𝑠)𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.1). Para el disturbio: 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. 𝑤(𝑠) 𝑀𝑐 (𝑠). =. 𝑅𝑎 +𝐿𝑎 𝑠 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐺𝑠 (𝑠)𝐺𝑣 (𝑠)𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.2). Considerando que el sensor es muy rápido, unitario 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐=0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. =. 𝑤(𝑠) 𝑀𝑐 (𝑠). =. 𝐺𝑣 (𝑠)𝐾𝑇 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐺𝑣 (𝑠)𝐾𝑇 +𝐾𝜑 𝐾𝑇. 𝑅𝑎 +𝐿𝑎 𝑠 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐺𝑣 (𝑠)𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.3). (2.4).
(29) CAPÍTULO 2. Materiales y métodos. 18. Con acción proporcional 𝐺𝑣 (𝑠) = 𝐾𝑃 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐=0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. 𝐾𝑃 𝐾𝑇 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐾𝑃 𝐾𝑇 +𝐾𝜑 𝐾𝑇. =. 𝑤(𝑠) 𝑀𝑐 (𝑠). =. 𝑅𝑎 +𝐿𝑎 𝑠 2 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐿𝑎 𝐵)𝑠+𝐵𝑅𝑎 +𝐾𝑃 𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.5). (2.6). Sistema de segundo orden 𝑊𝑛 = √ 𝜑=. 𝐵𝑅𝑎 +𝐾𝑃 𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.7). 𝐽𝐿𝑎 𝐽𝑅𝑎 +𝐿𝑎 𝐵. 2√𝐽𝐿𝑎 (𝐵𝑅𝑎 +𝐾𝑃 𝐾𝑇 +𝐾𝜑 𝐾𝑇 ). (2.8). El valor de 𝐾𝑃 se puede determinar de la frecuencia natural de oscilación deseada. Sin embargo el amortiguamiento ya quedará determinado. El error en estado estable a una entrada escalón unitario lo podemos obtener de: 𝐸(𝑠) =. 1 𝑠. − 𝐺𝑙𝑐𝑣 (𝑠). 1 𝑠. =. 1 𝑠. [1 − 𝐺𝑙𝑐𝑣 (𝑠)]. 𝐸𝑒𝑒 = lim 𝑠 𝐸(𝑠) = 1 − 𝐺𝑙𝑐𝑣 (𝑠) 𝑠→0. 𝐸𝑒𝑒 = 1 − 𝐸𝑒𝑒 ≠ 0. 𝐾𝑝 𝐾𝑇 𝐵𝑅𝑎 +𝐾𝑝 𝐾𝑇 +𝐾𝜑 𝐾𝑇. (2.9). (2.10).
(30) CAPÍTULO 2. Materiales y métodos. El tiempo de asentamiento 𝑡𝑠 =. 4 𝜑𝑤𝑛. 𝑡𝑠 =. 19. (2.11). 8𝐽𝐿𝑎 𝐽𝑅𝑎 + 𝐵𝐿𝑎. Es independiente de los ajustes del controlador. Ante disturbios en la carga además existe un cero en −. 𝑅𝑎 𝐿𝑎. que incrementa el. sobreimpulso en la respuesta del sistema. Error ante disturbios tipo escalón 𝐸(𝑠) =. 1 𝑠. − 𝐺𝑙𝑐𝑚 (𝑠). 𝐸𝑒𝑒 = lim 𝑠 𝑠→0. 𝐸𝑒𝑒 = 1 −. 1 𝑠. 1 𝑠. (1 − 𝐺𝑙𝑐𝑚 (𝑠)) 𝑅𝑎. 𝐵𝑅𝑎 +𝐾𝑝 𝐾𝑇 +𝐾𝜑 𝐾𝑇. También existirá error ante la presencia de perturbaciones tipo escalón.. Con controlador PI 𝐺𝑣 (𝑠) = 𝐾𝑝 +. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐=0 =. 𝐾𝐼 𝑠. =. 𝐾𝑝 𝑠+𝐾𝐼. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). 𝑠. =. 𝐾𝑝 𝐾𝑇 𝑠+𝐾𝐼 𝐾𝑇 3 𝐽𝐿𝑎 𝑠 +(𝐽𝑅𝑎 +𝐵𝐿𝑎 )𝑠 2 +(𝐵𝑅𝑎 +𝐾𝜑 𝐾𝑇 +𝐾𝑝 )𝑠+ 𝐾𝐼 𝐾𝑇. (2.12). Ahora el error en estado estable ante entrada paso escalón es cero. Existen tres raíces que pueden ser reales o una real y dos complejos conjugados..
(31) CAPÍTULO 2. Materiales y métodos. 20. Para valores dados de 𝜑 y 𝑤𝑛 se puede obtener el polinomio 𝑠 2 + 2𝜑𝑤𝑛 𝑠 + 𝑤𝑛 2 y dividiendo el polinomio de tercer orden entre este dará la tercera raíz que debe quedar en el semiplano izquierdo. También se puede fijar una raíz real en el semiplano izquierdo y dividir la ecuación característica entre este quedando un polinomio de segundo orden. De esta forma se puede determinar los ajustes del controlador. Esta estructura es muy susceptible a la presencia de perturbaciones en la carga, debido a que debe cambiar la velocidad para que exista la acción correctora. Una estructura que reduce la variación de la velocidad ante disturbios se analiza a continuación. 2.3 Control en cascada con lazo interno de corriente. El establecimiento de un lazo interno de momento o corriente figura (2.2). Figura 2.2 Esquema de control de velocidad con lazo interno de momento..
(32) CAPÍTULO 2. Materiales y métodos. 21. El controlador de momento se diseña de manera que sea muy rápido con relación a la dinámica de la carga y al lazo de velocidad. Teniendo en cuenta las condiciones señaladas para el diseño del lazo externo se puede considerar el lazo interno es unitario figura (2.3).. Figura 2.3 Esquema de control de velocidad considerando el lazo interno de momento unitario.. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐 =0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). =. 𝐺𝑣 (𝑠) 𝐽𝑠+𝐵+𝐺𝑣 (𝑠). (2.13). Ante disturbios. 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. 𝑤(𝑠) 𝑀𝑐 (𝑠). Con acción proporcional. =. 1 𝐽𝑠+𝐵+𝐺𝑣 (𝑠). (2.14).
(33) CAPÍTULO 2. Materiales y métodos. 22. 𝐺𝑣 (𝑠) = 𝐾𝑝. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐 =0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). =. 𝑤(𝑠). 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. 𝑀𝑐 (𝑠). 𝐾𝑝. (2.15). 𝐽𝑠+𝐵+𝐾𝑝. =. 1 𝐽𝑠+𝐵+𝐾𝑝. (2.16). Ante entrada de referencia tipo escalón de magnitud A1. 𝑤(𝑠) =. 𝐾𝑝. 𝐴1. 𝐽𝑠+(𝐵+𝐾𝑝 ) 𝑠. =. 𝐴1𝐾𝑝. (2.17). 𝐽𝑠2 +(𝐵+𝐾𝑝 )𝑠. El error en estado estable lim 𝑠( 𝑠→0. 𝐴1 𝑠. −. 𝐴1𝐾𝑝 𝑠(𝐽𝑠+𝐵+𝐾𝑝 ). 𝐸𝑒𝑒 = 𝐴1 −. 𝐴1𝐾𝑝 𝐵+𝐾𝑝. ). (2.18). = 𝐴1 (1 −. 𝐾𝑝 𝐵+𝐾𝑝. )=. 𝐴1𝐵 𝐵+𝐾𝑝. Si no existe fricción 𝐵 = 0 𝐸𝑒𝑒 = 0. Ante entrada de referencia tipo rampa de magnitud A2. 𝑤(𝑠) =. 𝐾𝑝. 𝐴2. 𝐽𝑠+(𝐵+𝐾𝑝 ). 𝑠2. =. 𝐴2𝐾𝑝 3 𝐽𝑠 +(𝐵+𝐾𝑝 )𝑠2. (2.19).
(34) CAPÍTULO 2. Materiales y métodos. =. 𝐾𝑝/𝐽 𝑠3 +. 𝐵+𝐾𝑝 𝐽. 𝑠. =. 23. 𝐾𝑝/𝐽 𝑠 2 (𝑠 +. 𝐵+𝐾𝑝 𝐽. ). Descomponiendo en fracciones parciales 1 𝑠 2 (𝑠 + 𝐾1 =. 𝐵+𝐾𝑝 𝐽. 𝐾1 𝐾2 𝐾3 + + 𝐵+𝐾𝑝 𝑠2 𝑠 𝑠+ 𝐽. 1 𝑠+. 𝐾2 = −. 𝐾3 =. ). =. 𝐵+𝐾𝑝 |𝑠=0 = 𝐽. 𝐽 𝐵 + 𝐾𝑝. 1. 𝐽 | = −( )2 𝑠=0 2 𝐵+𝐾𝑝 𝐵 + 𝐾𝑝 (𝑠 + 𝐽 ). 1 𝐵 + 𝐾𝑝 𝐽 | = − = 𝑠 2 𝑠=0 𝐽 (𝐵 + 𝐾𝑝)2 𝐽. 𝐴𝐾𝑝 𝐵+𝐾𝑝 𝑤(𝑠) = [ 2 − 𝐽 𝑠. 𝐽. 2. (𝐵+𝐾𝑝) 𝑠. ( +. 𝐽 )2 𝐵+𝐾𝑝 𝐵+𝐾𝑝. 𝑠+(. 𝐽. ] ). Transformada inversa 2 2 𝐵+𝐾𝑝 𝐾𝑝 𝐽 𝐽 𝐽 −( )𝑡 𝐽 𝑤(𝑡) = 𝐴 [( )𝑡 − ( ) 𝑢(𝑡) + ( ) 𝑒 ] 𝐽 𝐵 + 𝐾𝑝 𝐵 + 𝐾𝑝 𝐵 + 𝐾𝑝. (. 𝐴. 𝐵+𝐾𝑝. )𝑡 −. 𝐴𝐾𝑝𝐽 𝑢(𝑡) (𝐵+𝐾𝑝)2. 𝐵+𝐾𝑝. +. 𝐴𝐾𝑝𝐽 −( 𝐽 𝑒 (𝐵+𝐾𝑝)2. )𝑡. 𝑤 ∗ (𝑡) = 𝐴𝑡 El error será ∆𝑤(𝑡) = 𝑤 ∗ (𝑡) − 𝑤(𝑡) = 𝐴𝑡 − (. 𝐴. 𝐴𝐾𝑝𝐽. 𝐴𝐾𝑝𝐽. ) 𝑡 + (𝐵+𝐾𝑝)2 𝑢(𝑡) − (𝐵+𝐾𝑝)2 𝑒 𝐵+𝐾𝑝. −(. 𝐵+𝐾𝑝 )𝑡 𝐽.
(35) CAPÍTULO 2. Materiales y métodos. = 𝐴𝑡 (1 −. 1 𝐵+𝐾𝑝. 𝐴𝐾𝑝𝐽 [𝑢(𝑡) (𝐵+𝐾𝑝)2. )+. 𝐵+𝐾𝑝. −. −( 𝐽 𝑒. )𝑡. 24. ]. 𝑡→∞ ∆𝑤(𝑡) = ∞. Ante entrada disturbio tipo escalón de magnitud D1. 𝑤(𝑠) =. 1. 𝐷1. 𝐽𝑠+(𝐵+𝐾𝑝 ) 𝑠. =. 𝐷1. (2.21). 𝐽𝑠2 +(𝐵+𝐾𝑝 )𝑠. El error en estado estable 𝐷1. lim 𝑠( 𝑠→0. 𝑠. 𝐷1. −. 𝐽𝑠2 +(𝐵+𝐾𝑝 )𝑠. ) = 𝐷1 −. 𝐷1 𝐽𝑠+(𝐵+𝐾𝑝). (2.22). Si no existe fricción 𝐵 = 0 𝐸𝑒𝑒 = 𝐷1 −. 𝐷1 𝐾𝑝. Variaciones tipo paso en la entrada disturbio provoca un error inversamente proporcional al valor de la ganancia Kp.. Ante entrada disturbio tipo rampa de magnitud D2. 𝑤(𝑠) =. 1. 𝐷2. 𝐽𝑠+(𝐵+𝐾𝑝 ). 𝑠2. =. 𝐷2 𝐽𝑠3 +(𝐵+𝐾𝑝 )𝑠2. 𝑀𝑐(𝑡) = 𝐷2𝑡 𝑀𝑐(𝑠) =. 𝐷2 𝑠2. 𝑤(𝑠)|𝑤∗(𝑠)=0 =. 1. 𝐷2. 𝐽𝑠+𝐵+𝐾𝑝 𝑠2. (2.23).
(36) CAPÍTULO 2. Materiales y métodos. =. 𝐷2 𝐽. [. 1 𝑠 2 (𝑠+. 𝐵+𝐾𝑝 ) 𝐽. 25. ]. La descomposición en factores da el mismo resultado. 𝑤(𝑡) =. 𝐷2 𝐽. 𝐽. 2. 𝐽. 𝐽. 2. [(𝐵+𝐾𝑝) 𝑡 − (𝐵+𝐾𝑝) 𝑢(𝑡) + (𝐵+𝐾𝑝) 𝑒. 𝐷2. 𝐽𝐷2. 𝐽𝐷2. = 𝐵+𝐾𝑝 𝑡 − (𝐵+𝐾𝑝)2 𝑢(𝑡) + (𝐵+𝐾𝑝)2 𝑒. −(. −(. 𝐵+𝐾𝑝 )𝑡 𝐽. ]. 𝐵+𝐾𝑝 )𝑡 𝐽. El error ∆𝑤(𝑡) = 𝑤 ∗ (𝑡) − 𝑤(𝑡) = 𝐷2𝑡 −. 𝐷2 𝐵+𝐾𝑝. 𝐽𝐷2. 𝐽𝐷2. 𝑡 + (𝐵+𝐾𝑝)2 𝑢(𝑡) − (𝐵+𝐾𝑝)2 𝑒. −(. En estado estable t→ ∞ ∆𝑤(∞) = ∞. Variaciones tipo rampa en la entrada disturbio provoca un error infinito. Con acción PI 𝐺𝑣 (𝑠) = 𝐾𝑝 + 𝐺𝑣 (𝑠) =. 𝐾𝐼 𝑠. 𝐾𝑝 𝑠 + 𝐾𝐼 𝑠. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐=0 = Ante disturbios. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). =. 𝐾𝑝 𝑠+𝐾𝐼 𝑠 𝐾𝑝 𝑠+𝐾𝐼. 𝐽𝑠+𝐵+. 𝑠. =. 𝐾𝑝 𝑠 𝐾𝐼 𝐾𝑝 +𝑏. 1+ 𝐽 2 𝑠 + 𝐾𝐼. 𝐽. 𝑠+1. (2.25). 𝐵+𝐾𝑝 )𝑡 𝐽.
(37) CAPÍTULO 2. Materiales y métodos. 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 = 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0 =. 𝐺𝑙𝑐𝑚 (𝑠)𝑤𝑟𝑒𝑓=0. 𝑤(𝑠) 𝑀𝑐 (𝑠). =. 1 𝐽𝑠+𝐵 𝐾𝑝 𝑠+𝐾𝐼 1 1+ ( ) 𝐽𝑠+𝐵 𝑠. 26. (2.26). 𝑤(𝑠) 𝑠 = 2 𝑀𝑐 (𝑠) 𝐽𝑠 + 𝐵𝑠 + 𝐾𝑝 𝑠 + 𝐾𝐼. 𝑤(𝑠) 𝑠 = = 2 = 𝑀𝑐 (𝑠) 𝐽𝑠 + (𝐵 + 𝐾𝑝 ) 𝑠 + 𝐾𝐼. 1 𝐽 𝐾𝐼. 𝑠. 𝐾𝐼 𝐵+𝐾𝑝. 𝑠2 + (. 𝐾𝐼. )𝑠+1. Ante cambios en la señal de referencia y en la carga 𝑤𝑟𝑒𝑓 (𝑠) =. 𝐴1. 𝑀𝑐 (𝑠) =. 𝑠. 𝑤(𝑠) = [. 𝐾𝑝 𝑠) 𝐾𝐼 𝐵+𝐾𝑝 𝐽 2 )𝑠+1 𝑠 +( 𝐾𝐼 𝐽. (1+. ]. 𝐴1 𝑠. 𝐴2. (2.27). 𝑠. 𝑠. −[𝐽. ]. 𝐵+𝐾𝑝 )𝑠+1 𝑠 2 +( 𝐾𝐼 𝐽. 𝐴2 𝑠. (2.28). El error en estado estable lo obtenemos conociendo 𝑤(𝑡 → ∞) 𝑤(∞) = lim 𝑠 𝑤(𝑠) = 𝐴1 𝑠→0. (2.29). Como se aprecia un cambio tipo escalón en la carga no afecta la velocidad de salida que coincide con la entrada. Si la variación de la carga es tipo rampa 𝑤(∞) = 𝐴1 −. 𝐴2. (2.30). 𝐾𝐼. Por lo que existirá un error constante dado por −. 𝐴2 𝐾𝐼. .. Sin la presencia del disturbio la función de trasferencia 𝐺𝑙𝑐𝑣 (𝑠) con las acciones PI presenta un cero que provoca oscilaciones amortiguadas en la respuesta..
(38) CAPÍTULO 2. Materiales y métodos. 27. Los polos de la función pueden ser ajustados correctamente comparando la ecuación característica con la conocida para un sistema de segundo orden. 𝑠 2 + 2𝜑𝑤𝑛 + 𝑤𝑛 2 Siendo 𝑤𝑛 = √. 𝐾𝐼. 𝜑=. 𝐽. 𝐾𝑝 +𝐵 2𝐽𝑤𝑛. En un sistema sin ceros, los valores de 𝑤𝑛 y 𝜑 se relacionan con la forma de la respuesta típica a una entrada tipo escalón. 𝜑 < 1 Subamortiguado. 𝜑 = 1 Críticamente amortiguado. 𝜑 > 1 Sobreamortiguado En este caso existe un cero en −. 𝐾𝐼 𝐾𝑝. , su presencia altera en alguna medida los. conceptos conocidos.. 𝑤(𝑠) =. 𝐾𝑝 𝑠 𝐴1 𝐾𝐼 (𝐾 +𝐵) 𝐽 2 𝑝 𝑠 + 𝐾 𝑠+1 𝑠 𝐾𝐼 𝐼. 1+. =. (1+𝑎1𝑠). 𝐴1. (2.31). 𝑏2𝑠2 +𝑏1𝑠+1 𝑠. Descomponiendo en fracciones parciales 1. 𝑠+𝜎. 𝑠. (𝑠+𝜎)2 +(𝑤0 )2. 𝑤(𝑠) = 𝑐1 + 𝑐2 Donde 𝜎 =. 𝐶1 = 𝐴1. 𝑏1 2𝑏2. + 𝑐3. 𝑤0 (𝑠+𝜎)2 +(𝑤0 )2. 𝑤0 = √(𝑤𝑛 2 + 𝜎 2 ). 𝐶2 = −𝐴1. 𝐶3 = 𝐴1. En función de los parámetros calculados. 𝑤𝑛 2 =. 𝑎1 𝑏1 √𝑏2− 4. 1. (2.32). 𝑏2. [1 −. 𝑏1. ]. 2𝑎1. (2.33).
(39) CAPÍTULO 2. Materiales y métodos. 𝑤(𝑡) = 𝐴1 𝑢(𝑡) − 𝐴1𝑒 −𝑡 cos(𝑤0 𝑡) + 𝐴1. 𝑎1. 28. 𝑏1. √𝑏2−𝑏1. (1 − 2𝑎1) 𝑒 −𝑡 𝑠𝑒𝑛(𝑤0 𝑡) 2. 4. (2.34) Como se puede apreciar en la respuesta existen componentes sinusoidales amortiguados aunque 𝜑 = 1. Si mantenemos constante 𝐾𝐼 , 𝑤𝑛 resultará también constante 𝑤𝑛 = √ variando 𝐾𝑝 se afecta 𝜑 y se cambia el cero −. 𝐾𝐼. 𝐾𝐼 𝐽. .. 𝐾𝑝. En la figura (2.4) se muestra el comportamiento para diferentes coeficientes de amortiguamiento con 𝑤𝑛 = 1. 𝑟𝑎𝑑 𝑠. constante y el amortiguamiento.. 𝐾. Figura (2.4). Respuesta del sistema con cero en − 𝐾 𝐼 para 𝑝. coeficientes de amortiguamiento.. wn=1 rad/s y diferentes.
(40) CAPÍTULO 2. Materiales y métodos. 29. Como se puede apreciar con amortiguamiento de 1 la respuesta sobrepasa el valor final y hasta con 2 es ligeramente oscilatoria, esto se debe a la presencia del cero. Lo anterior se puede resolver colocando el efecto proporcional en la retroalimentación.. 2.4 Control relocalizando el efecto proporcional En la figura (2.6) se muestra el control ubicando el efecto proporcional en el lazo de retroalimentación considerando nuevamente la condición de lazo de momento unitario e instantáneo.. Figura (2.6) Esquema de control con acción proporcional reubicado.. 𝐺𝑙𝑐𝑣 (𝑠)𝑀𝑐 =0 =. 𝑤(𝑠) 𝑤𝑟𝑒𝑓 (𝑠). =. 𝐾𝐼 𝐽𝑆 2 +(𝐾𝑝 +𝐵)𝑠+𝐾𝐼. =. 1 𝐽 2 (𝐾𝑝 +𝐵)𝑠 𝑆 + 𝐾 +1 𝐾𝐼 𝐼. (2.35).
(41) CAPÍTULO 2. Materiales y métodos. 30. Como se puede apreciar la ecuación características es la misma que se obtuvo con el controlador en el paso directo, sin embargo el cero se anula. De esta forma la respuesta es más rápida y además más fácil el diseño del controlador como un sistema de segundo orden.. Figura (2.7). Respuesta relocalizando el efecto proporcional con coeficiente de amortiguamiento igual a 0.8.
(42) CAPÍTULO 2. Materiales y métodos. 31. Figura (2.8).Comparación con cero y sin cero para amortiguamiento igual a 1. Como se conoce el carácter de la respuesta de manera general depende de los polos s1 y s2 de la ecuación característica. Los polos con acciones PI pueden ser reales o complejos conjugados. Los complejos conjugados ofrecen respuestas más rápidas con sobreimpulsos inversamente proporcional al coeficiente de amortiguamiento. Tanto 𝑤𝑛 como 𝜑 dependen de los parámetros de la planta J y B y de los ajustes 𝐾𝑝 y 𝐾𝐼 𝑤𝑛 = √. 𝐾𝐼 𝐽. 𝜑=. 𝐾𝑝 +𝐵 2𝐽𝑤𝑛. El ancho de banda también, en este caso, se puede relacionar con 𝑤𝑛 [𝐺𝑙𝑐𝑣 (𝐽 𝑤𝐴𝐵 )] = 0.707 =. √2 2. (2.36).
(43) CAPÍTULO 2. Materiales y métodos. 32. Si 𝜑 = 1 los polos s1 y s2 son iguales 𝑠1 = 𝑠2 = 𝑤𝑛. 𝐺𝑙𝑐𝑣 (𝐽 𝑤𝐴𝐵 ) = √2 2. (2.37) 1 𝑠 𝑠 (1+ )(1+ ) 𝑠1 𝑠2. 𝑤 (𝑗𝑤𝐴𝐵 ) ] 𝑟𝑒𝑓 (𝑗𝑤𝐴𝐵 ). = [𝑊. =. =. 1 [1+. 𝑠 2 ] 𝑤𝑛. 1 𝑤 [1+( 𝐴𝐵 )2 ] 𝑤𝑛. 𝑤𝐴𝐵 = √√2 − 1 𝑤𝑛. (2.38). (2.39). (2.40). La velocidad de la respuesta y el ancho de banda se determinan por la frecuencia de oscilación. También la frecuencia natural de los polos de lazo cerrado cuando 𝐾. es proporcional a la relación √ 𝐼 . Por lo que la ganancia integral 𝐾𝐼 se obtiene 𝐽. partiendo del ancho de banda deseado. Al mismo tiempo, la ganancia Kp debe cambiarse para obtener el factor de amortiguamiento deseado ξ ≈ 1. Por lo que con el fin de mantener el factor de amortiguamiento en la gama de valores próximos a 1 la relación. 𝐾𝑝 2 𝐾𝐼. debe mantenerse.. Seguimiento a una entrada de referencia variable La capacidad de seguir una entrada de referencia variable es una característica deseable de los accionamientos. Consideremos el error ∆𝑤(𝑠) = 𝑊𝑒 (𝑠)𝑊𝑟𝑒𝑓 (𝑠). (2.41).
(44) CAPÍTULO 2. Materiales y métodos. Donde. 33. 𝑊𝑒 (𝑠) = 1 − 𝐺𝑙𝑐𝑣 (𝑠). Si para el efecto proporcional en el paso directo 𝑊𝑒 (𝑠) = 𝑊𝑒1 (𝑠). (2.42). Para 𝐾𝑝 en la retroalimentación 𝑊𝑒 (𝑠) = 𝑊𝑒2 (𝑠). 𝑊𝑒1 (𝑠) =. (2.43). ∆𝑤(𝑠) (𝑀𝑐 𝑤𝑟𝑒𝑓 (𝑠). = 0) =. 𝐵 𝐽 𝑠+ 𝑠2 𝐾𝐼 𝐾𝐼 𝐾𝑝 +𝐵 𝐽 1+ 𝑠+ 𝑠2 𝐾𝐼 𝐾𝐼. (2.44). Para una entrada tipo escalón 𝑤𝑟𝑒𝑓 (𝑠) =. 𝐴1 𝑠. Para estado estable ∆𝑤(𝑠) = lim(𝑠 ∆𝑤(𝑠)) = lim[𝑠 𝑊𝑒 (𝑠)𝑤𝑟𝑒𝑓 (𝑠)] 𝑠→0. 𝑠→0. lim (𝑠 ∆𝑤𝑒1 (𝑠). 𝐴1. 𝑠→0. ) = 0 lim (𝑠 ∆𝑤𝑒2 (𝑠) 𝑠 𝑠→0. 𝐴1 𝑠. )=0. (2.45) (2.46). En ambos casos el error en estado estable ante entrada paso es cero. Para entrada tipo rampa 𝑤𝑟𝑒𝑓 (𝑠) =. 𝐴2 𝑠2. lim[𝑠 𝑊𝑒1 (𝑠) 𝑠→0. 𝐴2 𝑠2. ]=. 𝐵 𝐾𝐼. 𝐴2. lim[𝑠 𝑊𝑒2 (𝑠) 𝑠→0. 𝐴2. 𝐾𝑝 +𝐵. 𝑠2. 𝐾𝐼. ]=. 𝐴2 (2.47).
(45) CAPÍTULO 2. Materiales y métodos. 34. Por lo que cualquiera de las configuraciones puede seguir una entrada rampa con un error constante. Si la fricción viscosa, B, es despreciable. La estructura con 𝐾𝑝 en el paso directo seguirá la referencia tipo rampa sin error.. 2.5 Estructura basada en el funcionamiento de Modelo Interno para perturbaciones Para el análisis de la estructura mediante el principio del Modelo Interno. Se expresan diferentes bloques en función de sus numeradores y denominadores como se muestra en la figura (2.9).. Figura (2.9) Estructura de control basada en el funcionamiento del Modelo Interno para perturbaciones.. 𝑊(𝑠) =. 𝐺𝑝 (𝑠)𝐺𝑣 (𝑠) 1+𝐺𝑝 (𝑠)𝐺𝑣. 𝑊 (𝑠) − (𝑠) 𝑟𝑒𝑓. 𝐺𝑝 (𝑠) 1+𝐺𝑝 (𝑠)𝐺𝑣 (𝑠). 𝑀𝑐 (𝑠). (2.48).
(46) CAPÍTULO 2. Materiales y métodos. 35. Para conocer el efecto del disturbio 𝑊𝑟𝑒𝑓 (𝑠) = 0 En función de los polinomios de los diferentes componentes 𝑊(𝑠) = −. 𝑊(𝑠) = −. 𝑁𝑐 (𝑠) 𝐷𝑐 (𝑠) 1+ 𝑁𝑐 (𝑠). 𝑁𝑝 (𝑠) 𝐷𝑝 (𝑠) 𝑁𝑝 (𝑠)𝑁𝑣 (𝑠) 𝐷𝑝 (𝑠)𝐷𝑣 (𝑠). 𝐷𝑣 (𝑠)𝑁𝑝 (𝑠). 𝐷𝑐 (𝑠) 𝐷𝑝 (𝑠)𝐷𝑣 (𝑠)+𝑁𝑝 (𝑠)𝑁𝑣 (𝑠). Para que 𝑤(∞) = 𝑤𝑟𝑒𝑓 (∞) = 0 los polinomios del controlador 𝑁𝑣 (𝑠) y 𝐷𝑣 (𝑠) deben asegurar que los ceros del denominador, polos de lazo cerrado, [(𝐷𝑝 (𝑠)𝐷𝑣 (𝑠) + 𝑁𝑝 (𝑠)𝑁𝑣 (𝑠))]𝐷𝑐 (𝑠) sean estables (parte real<0). Cuando el disturbio en la carga es inestable no se puede garantizar la estabilidad del sistema. Si 𝑀𝑐 (𝑡) = 𝑠𝑒𝑛(𝑤𝑡) los polos 𝑠1,2 = ±𝑗 del polinomio 𝐷𝑐 (𝑠) = 1 + 𝑠 2 serán polos de 𝑤(𝑠) y como resultado 𝑤(∞) ≠ 𝑤𝑟𝑒𝑓 . Los ceros no deseados de 𝐷𝑐 (𝑠) serán cancelados solo si el numerador de 𝐷𝑣 (𝑠)𝑁𝑝 (𝑠)𝑁𝑐 (𝑠) los contiene. Los polinomios 𝑁𝑐 (𝑠) y 𝑁𝑝 (𝑠) son definidos por la señal del disturbio 𝑀𝑐 y la dinámica del controlador respectivamente. Por otra parte el polinomio 𝐷𝑣 (𝑠) puede ser diseñado incluyendo los ceros de 𝐷𝑐 (𝑠). En este caso el disturbio en la carga no tiene efecto debido a que la velocidad 𝑤(∞) = 𝑤𝑟𝑒𝑓 . Lo anterior indica que si el disturbio en la carga es tipo 𝑀𝑐 (𝑠) = controlador 𝐺𝑣 (𝑠) debe contener la acción integral. 𝐾𝐼 𝑠. 𝐴 𝑠. el. para eliminarlo.. En conclusión es necesario conocer la forma del disturbio en la carga y si existen los ceros inestables el polinomio 𝐷𝑣 (𝑠) no los puede eliminar dado la imposibilidad de ser inestable..
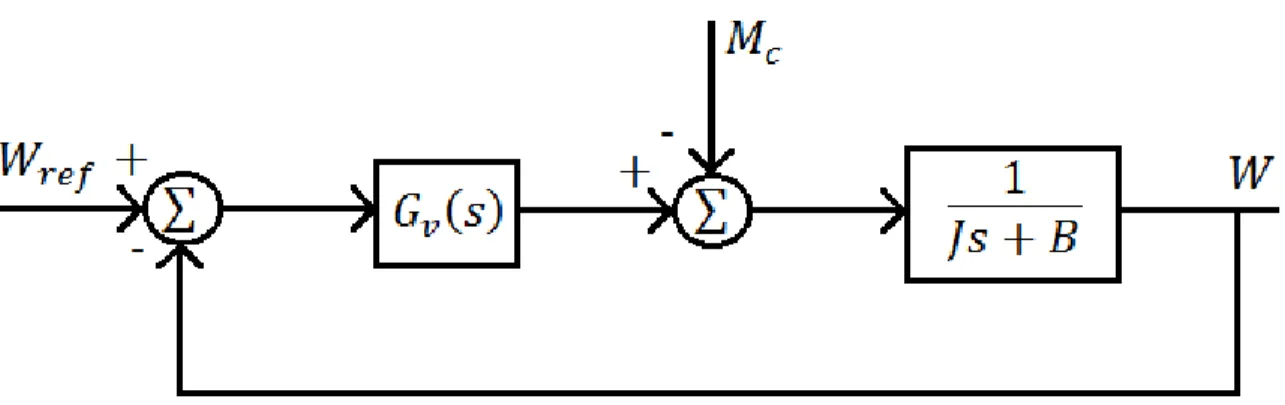
(47) CAPÍTULO 2. Materiales y métodos. 36. 2.6 Compensación “Feedforward” En la sección anterior se demostró que ciertos disturbios en la carga tales como 𝑀𝑐 (𝑡) = 𝑠𝑒𝑛(𝑤𝑡) no se pueden ser eliminados con el controlador de velocidad. La estructura “Feedforward” es aceptada como una solución para eliminar los efectos del disturbio de cualquier forma si cumple que estos sean conocidos.. Figura (2.10) Esquema de control “Feedforward”.. En el sistema se cumple 𝐽. 𝑑𝑤 𝑑𝑡. + 𝐵𝑤 = 𝑀𝑒𝑚 (𝑠) − 𝑀𝑐 (𝑠). (2.49). El momento calculado se relaciona con los parámetros aproximados mediante 𝑀𝑓𝑤 = 𝐽ˆ. 𝑑𝑤𝑟𝑒𝑓 𝑑𝑡. + 𝐵ˆ 𝑤𝑟𝑒𝑓. (2.50).
(48) CAPÍTULO 2. Materiales y métodos. 37. 𝐽ˆ y 𝐵ˆ pueden ser en alguna medida diferentes de los parámetros físicos J y B. En el caso que 𝑀𝑐 = 0 y 𝑤(0) = 𝑤𝑟𝑒𝑓 (0) 𝑡. 𝑤(𝑡) = ∫0 (𝐵 𝑤𝑟𝑒𝑓 (𝑇) − 𝐵 𝑤(𝑇) + 𝐽ˆ. 𝑑𝑤𝑟𝑒𝑓 (𝑇) 𝑑𝑡. )𝑑𝑡 = 𝑤𝑟𝑒𝑓 (𝑇) (2.51). En el caso en que existe el momento de disturbio 𝑀𝑐 ≠ 0 la referencia de 𝑀𝑒𝑚 = 𝑀𝑓𝑤 , no puede asegurar que 𝑤(𝑡) = 𝑤𝑟𝑒𝑓 (𝑡). Sin embargo si se conoce 𝑀𝑐 el momento 𝑀𝑒𝑚 = 𝑀𝑓𝑤 + 𝑀𝑓𝑐 donde 𝑀𝑓𝑤 es la acción “Feedforward” y 𝑀𝑓𝑐 es el momento conocido con anticipación de la carga (𝑀𝑐 ). 𝑀𝑒𝑚 = 𝑀𝑓𝑤 + 𝑀𝑓𝑐 = 𝐽ˆ. 𝑑𝑤𝑟𝑒𝑓 𝑑𝑡. + 𝐵ˆ 𝑤𝑟𝑒𝑓 + 𝑀𝑓𝑐. (2.52). De donde 1. 𝑡. 𝑤(𝑡) = ∫0 [𝑀𝑓𝑐 (𝑇) − 𝑀𝑐 (𝑇) + 𝐵ˆ 𝑤𝑟𝑒𝑓 (𝑇) − 𝐵𝑤(𝑇) + 𝐽ˆ 𝐽. 𝑑𝑤𝑟𝑒𝑓 (𝑇) 𝑑𝑡. ] 𝑑𝑡. (2.53) 𝑤(𝑡) = 𝑤𝑟𝑒𝑓 (𝑡). Analizando la expresión anterior podemos llegar a las conclusiones siguientes: - Cuando la inercia J tiene un error ∆𝐽 la velocidad de salida. 𝑤(𝑡) = 𝑤𝑟𝑒𝑓 (𝑡)(1 +. ∆𝐽 𝐽. ). - Un error en el coeficiente de fricción ∆𝐵 produce un error de seguimiento que es proporcional ∆𝐵 y a 𝑤(𝑡).. - Cualquier error en el momento estimado de la carga ∆𝑀𝑓𝑐 = 𝑀𝑓𝑐 − 𝑀𝑐 genera un error ∆𝑤 proporcional al integral de ∆𝑀𝑓𝑐 ..
(49) CAPÍTULO 2. Materiales y métodos. 38. Conclusiones De las diferentes estructuras estudiadas para el control de velocidad o posición la que más ventajas presenta es la conformada por el lazo interno de momento o de corriente. La estructura de control sin el lazo es más lenta. Para aplicar con éxito la estructura basada en el Principio del modelo Interno se requiere conocer la forma de los disturbios y en el caso de disturbios sean oscilatorios nunca podrían ser compensados. La estructura “Feedforward” solo es posible utilizarla de forma exitosa cuando con anticipación se conoce el disturbio. La estructura con lazo interno de momento y acción proporcional integral ofrece compensación total a cambios tipo paso tanto en la referencia como en la carga. Si la fricción en la carga es despreciable la estructura con acción PI en el paso directo puede seguir sin error la entrada tipo rampa. La relocalización del efecto proporcional en la retroalimentación disminuye el sobreimpulso en la respuesta pero sigue una entrada rampa con un error constante aunque no esté presente la fricción..
(50) CAPÍTULO 3. Resultados. y discusión. 39. CAPÍTULO 3. Control digital de máquinas de corriente directa.. 3.1 Introducción En los últimos años se ha manifestado la tendencia al uso cada vez más frecuente de controladores digitales. Mediante ellos se ha obtenido éxitos en aplicaciones inteligentes de robots, en el ahorro de portadores energéticos en el transporte, equipos domésticos, en la toma de decisiones de acuerdo a criterios de operación especificados. Estos adelantos se deben básicamente a la disponibilidad de computadoras digitales a relativamente bajos precios, los avances en la Teoría de Control y en el Procesamiento Digital de Señales entre otros. Un resumen de las ventajas y desventajas relativas entre los controladores analógicos y digitales se muestra a continuación en la tabla 3.1 Tipo de Controlador Analógicos. Ventajas Elevado. ancho. Desventajas de Envejecimiento. banda.. componentes.. Elevada resolución.. Cambios. Fácil diseño.. condiciones. debido. de. a. ambientales. Digitales. Diseño programable. Comportamiento preciso.. Dificultades de diseño..
(51) CAPÍTULO 3. Resultados. y discusión. Implementación. de Necesidades. 40. de. algoritmos de control procesadores de altas más complejos.. prestaciones.. Fácilmente ampliables. Problemas numéricos. Posibilidades controlar variables. de varias. al. mismo. tiempo. Tabla 3.1 Ventajas y desventajas de las diferentes variantes de controladores.. 3.2 Métodos de diseño Existen dos formas generales para enfrentar el diseño de los sitemas digitales de control (Franklin, Powell, Workman 1997 ). - Método de la Emulación (Diseño analógico y conversión del controlador a digital). - Diseño digital directo, (Debe discretizarse el modelo de la planta).. Para la discretización de la planta existen diferentes alternativas, entre las cuales las más utilizadas son; - Equivalencia Cero Orden Hold - Correspondencia entre polos y ceros - Transformación bilineal..
(52) CAPÍTULO 3. Resultados. y discusión. 41. La equivalencia Cero orden Hold se obtiene al transformar el conjunto extrapolar tipo cero y la función transferencial del proceso Gp(s) 𝐺𝑝 (𝑠). 𝐺𝑝 (𝑧) = (1 − 𝑧 −1 )𝑍 (. ). 𝑠. (3.1). Para la correspondencia entre polos y ceros se parte de la relación entre z y s 𝑧 = 𝑒 𝑠𝑇. (3.2). Siendo T el tiempo de muestreo. La equivalencia se obtiene teniendo en cuenta que tanto polos como ceros explícitos en el campo s pueden ser transformado en polos en el plano z mediante la relación, es decir si existe un polo o cero en 𝑠𝑖 existirá un polo o cero en 𝑧𝑖 = 𝑒 −𝑠𝑖𝑇 . Si G(s) tiene más polos que ceros (ceros implícitos) se colocan ceros en z= -1 hasta igualar el número de polos y ceros. La ganancia se obtiene de las condiciones en estado estable. 𝐺(𝑧)]𝑧=1 = 𝐺(𝑠)]𝑠=0. (3.3). La equivalencia mediante la Transformación Bilineal se obtiene haciendo 2 𝑧−1. 𝑠= (. 𝑇 𝑧+1. ). (3.4). Ejemplo para el motor excitado independientemente con inductancia y fricción viscosa despreciable la función transferencial continua de velocidad es:. 𝐺𝑣 (𝑠) =. 𝑊(𝑠) 𝑉(𝑠). =. 𝑘𝑇 𝐽𝑅𝑎 𝑘𝑇 𝑘𝜑. 𝑠+. 𝐽𝑅𝑎. (3.5).
(53) CAPÍTULO 3. Resultados. y discusión. 42. Para la función de transferencia de posición. 𝜃(𝑠). 𝐺𝑣 (𝑠) = 𝑉(𝑠). 𝑘𝑇 𝐽𝑅𝑎 𝑘𝑇 𝑘𝜑. 𝑠(𝑠+. 𝐽𝑅𝑎. (3.6) ). 3.3 Implementación del control digital a motores de corriente directa con excitación independiente. La diferencia con la implementación de los controles analógicos estriba en que en los digitales el controlador es de tipo digital, un microprocesador, un procesador digital de señales o una computadora, todos ellos programables. El motor seguirá siendo analógico. Los sensores pueden ser analógicos o digitales, estos últimos son menos propensos a la existencia de ruido, los encoders ópticos son muy utilizados en el caso de medir velocidad o posición. Cualquiera que sea la variante de controlador además de recibir la señal del valor deseado debe recibir información sobre el motor, las señales provenientes del sensor de posición y velocidad y de la corriente tomada por el motor, a su vez el control entregará al convertidor las señales necesaria para conmutar en el momento indicado los componentes electrónicos de los convertidores.. La figura 3.1 muestra un diagrama esquemático del controlador digital.
(54) CAPÍTULO 3. Resultados. y discusión. 43. Figura 3.1 Diagrama esquemático del controlador digital de velocidad o posición.. El controlador puede al mismo tiempo controlar el momento tomando la señal del sensor de corriente o la velocidad y/o posición mediante los pulsos que recibe del sensor de velocidad. Dentro de cada período de muestreo el controlador digital evalúa el error de velocidad y genera la entrada de referencia del controlador de momento, también es capaz de detectar cambios en el momento de la carga y generar el mando para corregir los cambios antes de que la variación de velocidad o posición sea apreciable, esto se logra siempre que la respuesta del lazo de momento sea mucho más rápida que el lazo externo. El algoritmo de control recibe en cada instante de muestreo los valores de velocidad o posición deseados, los reales y genera los mandos para el controlador de momento..
(55) CAPÍTULO 3. Resultados. y discusión. 44. Figura 3.2 Diagrama esquemático del algoritmo con sus entradas y salidas discretas.. En dependencia del tipo de algoritmo de control se puede plantear 𝑓[. 𝑀𝐷(𝐾) = 𝑊𝐷(𝑘𝑇), 𝑊𝐷((𝑘 − 1)𝑇), 𝑊𝐷((𝑘 − 2)𝑇) … 𝑊𝑟𝑒𝑓(𝐾𝑇), 𝑊𝑟𝑒𝑓((𝑘 − 1)𝑡), 𝑊𝑟𝑒𝑓((𝑘 − 2)𝑇) … . 𝑀𝐷((𝑘 − 1)𝑇), 𝑊𝐷((𝑘 − 2)𝑇) …. ]. Que puede ser expresado como: 𝑁𝑊𝑟𝑒𝑓. 𝑊 𝑀𝐷(𝑘𝑇) = ∑𝑁𝑤 𝑖=0 𝑊𝐷(𝑘 − 𝑖)𝐺𝑖 + ∑𝑖=0. 𝑀 𝑊𝑟𝑒𝑓(𝑘 − 𝑖)𝐺𝑖𝑊𝑑 + ∑𝑁𝑚 (3.7) 𝑖=1 𝑀(𝑘 − 1)𝐺𝑖. Donde Nw ,Nwref y Nm dependen del algoritmo de control MD se obtiene con un retardo, necesario para evaluar el algoritmo desde nT a (n+1)T. Comparando con el algoritmo analógico en el digital (Barbera E, 2013) - La señal se deteriora por el efecto de la discretización en tiempo y amplitud. - Obtención de la señal sin ruido. - Posibilidad de implementar algoritmos de control diferentes. - Posibilidad de controlar varios parámetros..
(56) CAPÍTULO 3. Resultados. y discusión. 45. - La frecuencia de muestreo de 20KHz son utilizadas comúnmente lo que permite ancho de banda de 1 KHz. - La dinámica de la referencia puede cambiar dentro de 100 y 200. microsegundos lo que excede la constante de tiempo mecánica del motor carga en decenas de veces.. 3.4. Implementación de control de velocidad con acción proporcional.. Considerando que el lazo interno de momento es muy rápido y unitario, para el motor con carga sin fricción viscosa y con inductancia despreciable. 𝐺ℎ(𝑠) =. 1−𝑒 −𝑠𝑇. (3.8). 𝑠. Discretizando los diferentes componentes tendremos Para el sistema mecánico 𝐽. 𝑑𝑊 𝑑𝑡. = 𝑀𝑚 − 𝑀𝑐. (3.9). 𝑑𝑊 1 = (𝑀𝑚 − 𝑀𝑐 ) 𝑑𝑡 𝐽 Entre nT y (n+1)T la velocidad cambia de W(n) a W((n+1)T) Integrando ambos miembros tenemos: ((𝑛+1)𝑇) 1. 𝑊((𝑛 + 1)𝑇) − 𝑊(𝑛𝑇) = ∫𝑛𝑇. 𝐽. (𝑀𝑚 − 𝑀𝑐 )𝑑𝑡. (3.10). Si Mm es constante en el intervalo 1 1 ((𝑛+1)𝑇 𝑊((𝑛 + 1)𝑇) = 𝑤(𝑛𝑇) + 𝑀𝑚 𝑇 − ∫ 𝑀𝑐 𝑑𝑡 𝐽 𝐽 𝑛𝑇 La integral es el valor medio entre n(T) y (n+1)T del disturbio y es igual a 𝑇 𝐽. 𝑀𝑐(𝑛𝑇)..
(57) CAPÍTULO 3. Resultados. y discusión. 46. Entonces 𝑊((𝑛 + 1)𝑇) = 𝑤(𝑛𝑇) +. 𝑇 𝑇 𝑀𝑚 (𝑛𝑇) − 𝑀𝐶 (𝑛𝑇) 𝐽 𝐽. La función de transferencia, en z, que relaciona la salida con la entrada (Mc=0) será obtenida transformando la ecuación de diferencia 𝑇. 𝑧𝑊(𝑧) − 𝑤(𝑧) = 𝑀𝑚(𝑧). (3.11). 𝐽. De donde 𝐺𝑃 (𝑧) =. 𝑊(𝑧) 𝑀(𝑧). =. 𝑇. (3.12). 𝐽(𝑧−1). La función entre el disturbio y la salida será igual pero con signo negativo. 𝐺𝑃 (𝑧) =. 𝑊(𝑧) 𝑀(𝑧). =−. 𝑇 𝐽(𝑧−1). La medición de la velocidad se obtiene promediando dos salidas sucesivas.. 𝑊𝐷 (𝑛𝑇) =. 𝑊(𝑛𝑇)+𝑊((𝑛−1)𝑇) 2. (3.13). 𝑇𝑟𝑎𝑛𝑠𝑓𝑜𝑟𝑚𝑎𝑛𝑑𝑜 𝑡𝑒𝑛𝑑𝑟𝑒𝑚𝑜𝑠. 𝑊(𝑧) + 𝑧 −1 𝑊(𝑧) 𝑊𝐷 (𝑧) = 2 De donde. 𝐺𝑠 (𝑧) =. Para el controlador P. 𝑊𝐷 (𝑧) 𝑊(𝑧). =. 1+𝑧 −1 2. =. 𝐷𝑣 (𝑧) = 𝐾𝑃. 𝑧+1 2𝑧. (3.14).
(58) CAPÍTULO 3. Resultados. y discusión. 47. La función en lazo cerrado sin disturbio es:. 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 =. 𝑇 𝐽. 𝐾𝑃 𝑧. (3.15). 𝐾 𝑇 𝐾 𝑇 𝑧 2 +( 𝑃 −1)𝑧+ 𝑃 2𝐽. 2𝐽. La función de lazo cerrado al disturbio es:. 𝐺𝑙𝑐𝑣 (𝑧)𝑤𝑟𝑒𝑓=0 = −. 𝑇 𝑧 𝐽 𝐾𝑃 𝑇 𝐾𝑃 𝑇 𝑧 2 +( 2𝐽 −1)𝑧+ 2𝐽. (3.16). La respuesta a una entrada paso escalón unitario en la referencia es: 𝑇. 𝑤(𝑧) =. 𝐾𝑝 𝐽 𝑧. 𝑧. (3.17). 𝐾 𝑇 𝐾 𝑇 (𝑧 2 +( 𝑃 −1)𝑧+ 𝑃 )( 𝑧−1) 2𝐽 2𝐽. El error en estado estable se obtiene de 𝐸(∞) = (lim. 𝑧−1. 𝑧→1 𝑧. ) 𝐸(𝑧) = (lim. 𝑧−1. 𝑧→1 𝑧. 𝑧. ) (𝑧−1) (1 −. 𝑇 𝐽. 𝐾𝑃 𝑧. 𝐾 𝑇 𝐾 𝑇 ) (𝑧 2 +( 𝑃 −1)𝑧+ 𝑃 ) 2𝐽. (3.18). 2𝐽. 𝐸(∞) = 0. Para disturbio tipo escalón unitario 𝑤(𝑧) =. 𝑇 𝑧 𝐽. 𝑧. 𝐾 𝑇 𝐾 𝑇 (𝑧 2 +( 𝑃 −1)𝑧+ 𝑃 )( 𝑧−1) 2𝐽 2𝐽. (3.18). Ante disturbio tipo paso escalón en 𝑀𝑐 el error en estado estable es inverso a la ganancia del controlador (1/Kp) por lo que no es capaz, con la acción proporcional, solamente, de eliminar los disturbios tipo paso..
(59) CAPÍTULO 3. Resultados. y discusión. 48. El sistema en ambos casos, con acción proporcional solamente, es de segundo orden, por lo que posee dos raíces. Si se desea que el sistema sea estable y que responda en el mínimo tiempo posible sin oscilar, las raíces tienen que ser reales, iguales y con valor modular menor que 1. Esto solo se logra con 𝐾𝑃 =. 0.36𝐽 𝑇. . (3.19). 3.5 Implementación de control de velocidad acción Proporcional Integral. La discretización de la acción PI la realizaremos a partir de la salida del controlador Mref y la entrada ∆w , error de velocidad 𝑀𝑟𝑒𝑓(𝑛𝑇) = 𝐾𝑃 ∆𝑤(𝑛𝑇) + 𝐾𝐼 ∑𝑛𝑗=0 ∆𝑤(𝑗𝑇) 𝑀𝑟𝑒𝑓(𝑧) = 𝐾𝑃 ∆𝑤(𝑧) + 𝐾𝐼 De donde 𝐺𝑣(𝑧) =. 𝑀𝑟𝑒𝑓(𝑧) ∆𝑤(𝑧). (3.20). 1 ∆𝑤(𝑧) 1 − 𝑧 −1 = 𝐾𝑃 + 𝐾𝐼. 1. (3.21). 1−𝑧 −1. La función de transferencia que relaciona la velocidad de salida con la entrada de referencia de velocidad será entonces:. 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 = 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 =. 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧) 𝑤(𝑧). 𝑤𝑟𝑒𝑓 (𝑧). 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 =. =. 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧). =. 𝐺𝑣 (𝑧)𝐺𝑃 (𝑧). (3.22). 1+𝐺𝑠 (𝑧)𝐺𝑣 (𝑧)𝐺𝑃 (𝑧) 𝑧(𝐾𝑃 (𝑧−1)+𝐾𝐼 𝑧). 𝑇 𝐽. 𝑇 𝐽. 𝑧(𝑧−1)2 + (𝐾𝑃 (𝑧−1)+𝐾𝐼 𝑧)(𝑧+1) 𝑇. =. 𝑇. (𝐾𝑃 +𝐾𝐼 ) 𝑧 2 −𝐾𝑃 𝑧 𝐽 𝐽 𝑇. 𝑇. 𝑇. 𝑇. 𝑧 3 −(2−𝐾𝑃 2𝐽−𝐾𝐼 2𝐽)𝑧 2 +(1+𝐾𝐼 2𝐽)𝑧−𝐾𝑃 2𝐽. Mientras que la función de trasferencia de lazo cerrado de velocidad con la ganancia 𝐾𝑃 relocalizada en la retroalimentación 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 ∗ es:.
(60) CAPÍTULO 3. Resultados. 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 ∗= 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 ∗=. 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧) 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧). =. y discusión. 49. 𝐺𝑣 (𝑧)𝐺𝑃 (𝑧). (3.23). 1+𝐺𝑣 (𝑧)𝐺𝑃 (𝑧)𝐺𝑠 (𝑧) 𝑇 𝐽. 𝐾𝐼 𝑧 2. =. 𝑇 2𝐽. 𝑇 2𝐽. 𝑇 2𝐽. 𝑧 3 −(2−𝐾𝑃 −𝐾𝐼 )𝑧 2 +(1+𝐾𝐼 )𝑧−𝐾𝑃. 𝑇 2𝐽. La función de transferencia que relaciona velocidad de salida con el disturbio se obtiene considerando 𝑤𝑟𝑒𝑓 = 0.. 𝐺𝑙𝑐𝑚 (𝑧)𝑤𝑟𝑒𝑓=0 = 𝐺𝑙𝑐𝑚 (𝑧)𝑤𝑟𝑒𝑓=0 =. 𝑤(𝑧) 𝑀𝑐 (𝑧). 𝑤(𝑧) 𝑀𝑐 (𝑧). =. =. −𝐺𝑃 (𝑧) 1+𝐺𝑠 (𝑧)𝐷𝑣 (𝑧)𝐺𝑃 (𝑧). (3.24). 𝑇 𝑇 𝐽 𝐽 𝑇 𝑇 𝑇 𝑇 3 2 𝑧 −(2−𝐾𝑃 −𝐾𝐼 )𝑧 +(1+𝐾𝐼 )𝑧−𝐾𝑃 2𝐽 2𝐽 2𝐽 2𝐽. − 𝑧 2+ 𝑧. Los parámetros del controlador 𝐾𝑃 𝑦 𝐾𝐼 , aparecen multiplicados por la relación 𝑇 2𝐽. por lo que para simplificar el análisis podemos normalizar estos parámetros. haciendo 𝐾𝑃´ = 𝐾𝑃. 𝑇 2𝐽. 𝐾𝐼´ = 𝐾𝐼. 𝑇 2𝐽. siguiendo esta notación las funciones de. transferencia en lazo cerrado de velocidad ante entrada de referencia 𝐺𝑙𝑐𝑣(𝑧), con la ganancia Kp relocalizada 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 ∗ y ante disturbio 𝐺𝑙𝑐𝑚 (𝑧)𝑤𝑟𝑒𝑓=0 quedarán de la forma siguiente:. 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 = 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 =. 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧) 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧). = =. 2𝑧(𝐾𝑃´ (𝑧−1)+𝐾𝐼´ 𝑧) 𝑧(𝑧−1)2 +(𝐾𝑃´ (𝑧−1)+𝐾𝐼´ 𝑧)(𝑧+1) 2(𝐾𝑃´ +𝐾𝐼´ )𝑧 2 −2𝐾𝑃´ 𝑧 𝑧 3 −(2−𝐾𝑃´ −𝐾𝐼´ )𝑧 2 +(1+𝐾𝐼´ )𝑧−𝐾𝑃´.
(61) CAPÍTULO 3. Resultados. 𝐺𝑙𝑐𝑣 (𝑧)𝑀𝑐=0 ∗=. 𝑤(𝑧) 𝑤𝑟𝑒𝑓 (𝑧). =. y discusión. 50. (2𝐾𝐼´ )𝑧 2 𝑧 3 −(2−𝐾𝑃´ −𝐾𝐼´ )𝑧 2 +(1+𝐾𝐼´ )𝑧−𝐾𝑃´. Y la del disturbio. 𝐺𝑙𝑐𝑚 (𝑧)𝑤𝑟𝑒𝑓=0 =. 𝑤(𝑧) 𝑀𝑐 (𝑧). =−. 𝑇. 𝑧 2 −𝑧. 𝐽 𝑧 3 −(2−𝐾𝑃´ −𝐾𝐼´ )𝑧 2 +(1+𝐾𝐼´ )𝑧−𝐾𝑃´. Los ceros de la ecuación característica son los polos de la función transferencial de lazo cerrado del control PI de velocidad. Los ceros de la ecuación característica determinan la forma de la respuesta. Sean estos 𝑃1 , 𝑃2 𝑦𝑃3 . En función de estos ceros la ecuación característica será: 𝑧 3 − (𝑃1 + 𝑃2 + 𝑃3 )𝑧 2 + (𝑃1 𝑃2 + 𝑃2 𝑃3 + 𝑃3 𝑃1 )𝑧 − 𝑃1 𝑃2 𝑃3. Comparando los ceros de la ecuación características en función de 𝐾𝑃´ y 𝐾𝐼´ con los ceros generalizados se establecen tres ecuaciones: ´. ´. 𝑃1 + 𝑃2 + 𝑃3 = 2 − 𝐾𝑃 − 𝐾𝐼. (3.25). 𝑃1 𝑃2 + 𝑃2 𝑃3 + 𝑃3 𝑃1 = 𝐾𝐼´ + 1. (3.26). 𝑃1 𝑃2 𝑃3 = 𝐾𝑃´. (3.27). Los ceros de la función de transferencia que relaciona velocidad con entrada de referencia son obtenidos de igualar el numerador a cero resultando:.
(62) CAPÍTULO 3. Resultados. 𝑧1 =. 𝐾𝑃´ 𝐾𝑃´ +𝐾𝐼´. 𝑦 𝑧2 = 0. y discusión. 51. (3.28). El cero en 𝑧2 se ubica en el origen y determina el desplazamiento en un instante de muestreo de la respuesta, esto es beneficioso ya que reduce el retardo introducido por el polinomio de tercer orden del denominador, el cero 𝑧1 es menor de 1 por lo que se encuentra ubicado dentro del círculo de radio unidad, equivalente al semiplano izquierdo del plano s e influye en el sobreimpulso de la respuesta. Como se puede apreciar existen tres ecuaciones y solo dos parámetros de ajustes, por lo que no es posible ubicar los polos de la función transferencial de lazo cerrado de manera arbitraria. Para que el sistema en lazo cerrado sea estable y que no oscile deben cumplirse las restricciones siguientes: 0 < 𝑅𝑒𝑎𝑙(P1 ) < 1 , 0 < 𝑅𝑒𝑎𝑙(P2 ) < 1 , 0 < 𝑅𝑒𝑎𝑙(P3 ) < 1 Imag(P1 ) = 0 , Imag(P2 ) = 0 , Imag(P3 ) = 0. Criterio de optimización de la respuesta: Si el sistema es estable y no oscila como se muestra en la figura 3.3 para entrada referencia paso..
(63) CAPÍTULO 3. Resultados. y discusión. 52. Figura (3.3) respuesta de un sistema estable sin oscilar.. ∞. ∫ ∆𝑤(𝑡) 𝑑𝑡 → Mínimo 0. Establezcamos una sumatoria dado el carácter discreto de ∆𝑤 Q = ∑∞ 𝐾=0 ∆𝑤(𝐾𝑇). (3.29). −𝑛 Q (z) = ∑∞ = 𝑛=0 𝑄(𝑛)𝑧. 1 1−𝑍 −1. ∆𝑤(𝑧). El valor final de Q(n) se obtiene cuando n→ ∞ 𝑧−1. Q=Q (∞)=lim [( 𝑧→1. 𝑧. ) 𝑄(𝑧)] = lim [( 𝑧→1. 𝑧−1. 1. 𝑧 1−𝑧 −1. ∆𝑤(𝑧))] = lim[∆𝑤(𝑧)] 𝑧→1. (3.31).
(64) CAPÍTULO 3. Resultados. y discusión. 53. Consideremos que la entrada sea un paso de magnitud A 𝑊𝑟𝑒𝑓 =. 𝐴𝑧 𝑧−1. ∆𝑤(𝑧) = 𝑤𝑟𝑒𝑓 (𝑧) − 𝑤(𝑧). (3.32). En este paso se toma la función de trasferencia de lazo cerrado de velocidad con la ganancia Kp relocalizada 𝐺𝑙𝑐𝑣 ∗ (𝑧), debido a que con esta estructura se elimina uno de los dos ceros del numerador y proporciona una respuesta con menos sobreimpulso.. ∆𝑤 (𝑧) = 𝑤𝑟𝑒𝑓 (𝑧)[1 − 𝐺𝑙𝑐𝑣 ∗ (𝑧)] ∆𝑤 (𝑧) = ( ∆𝑤 (𝑧) = ( ∆𝑤 (𝑧) = ( ∆𝑤 (𝑧) = ( ∆𝑤 (𝑧)=. 𝐴𝑧 𝑧−1 𝐴𝑧 𝑧−1 𝐴𝑧 𝑧−1 𝐴𝑧 𝑧−1. ) (1− )( )( )(. 2𝐾𝐼′ 𝑧 2 𝑧 3 −(2−𝐾𝑝′ −𝐾𝐼′ )𝑧 2 +(1+𝐾𝐼′ )𝑧−𝐾𝑝′. 𝑧 3 + 𝑧 2 (−2𝐾𝐼′ −2+𝐾𝑝′ +𝐾𝐼′ )+𝑧(1+𝐾𝐼′ )−𝐾𝑝′ 𝑧 3 −(2−𝐾𝑝′ −𝐾𝐼′ )𝑧 2 +(1+𝐾𝐼′ )𝑧−𝐾𝑝′ 𝑧 3 + 𝑧 2 (𝐾𝑝′ −𝐾𝐼′ −2)+𝑧(1+𝐾𝐼′ )−𝐾𝑝′ 𝑧 3 −(2−𝐾𝑝′ −𝐾𝐼′ )𝑧 2 +(1+𝐾𝐼′ )𝑧−𝐾𝑝′ (𝑧−1)(𝑧 2 +𝑧(𝐾𝑝′ −𝐾𝐼′ −1)+𝐾𝑝′ ) 𝑧 3 −(2−𝐾𝑝′ −𝐾𝐼′ )𝑧 2 +(1+𝐾𝐼′ )𝑧−𝐾𝑝′. ). ). ). 𝐴𝑧 (𝑧 2 +(𝐾𝑝′ −𝐾𝐼′ −1)𝑧+𝐾𝑝′ ) 𝑧 3 −(2−𝐾𝑝′ −𝐾𝐼′ )𝑧 2 +(1+𝐾𝐼′ )𝑧−𝐾𝑝′. Q=Q (∞)=lim(∆𝑤(𝑧)) = 𝐴 [ 2𝐾𝑝′ −𝐾𝐼′ 2𝐾𝐼′. =A(. 1+𝐾𝑝′ −𝐾𝐼′ −1+𝐾𝑝′. 1−2+𝐾𝑝′ +𝐾𝐼′ +1+𝐾𝐼′ −𝐾𝑝′. 𝑧→1. =A. ). 𝐾𝑝′ 𝐾𝐼′. 1. − ) 2. ]. (2.33).
(65) CAPÍTULO 3. Resultados. y discusión. Q es minimizado con la mínima relación. 𝐾𝑝′ 𝐾𝐼′. 54. , siempre que se cumplan las. restricciones de las raíces. Como vimos. P1+P2+P3= 2 − 𝐾𝑝′ − 𝐾𝐼′ P1P2 + P2P3 + P3P1 = 𝐾𝐼′ +1 P1P2P3=𝐾𝑝′. Sumando tenemos (P1+P2+P3) + (P1P2 + P2P3 +P3P1) + (P1P2P3) = 2 − 𝐾𝑝′ − 𝐾𝐼′ + 𝐾𝐼′ + 1 + 𝐾𝑝′ = 3. También. (3.34). 𝑃1𝑃2𝑃3 𝑃1𝑃2+𝑃2𝑃3+𝑃3𝑃1−1. =. 𝐾𝑝′ 𝐾𝐼′. (3.35). Recordemos la restricción Real (P1) <1 Real (P2) <1 Real (P3) <1 Haciendo x=. x>1. y>1. 1. 1. 1. y= 𝑃2 v= 𝑃3 𝑃1. (3.36). v>1. Podemos trasformar la ecuación: (P1+P2+P3) + (P1P2 +P2P3 +P3P1) + (P1P2P3) = 3 a 1. 1. 1. 1. 𝑥. 𝑦. 𝑣. 𝑥𝑦. ( + + )+(. +. 1 𝑦𝑣. +. 1 𝑥𝑣. )+(. 1 𝑥𝑦𝑣. )=3.
(66) CAPÍTULO 3. Resultados. (𝑦𝑣+𝑥𝑣+𝑥𝑦)+𝑣+𝑥+𝑦+1 𝑥𝑦𝑣. y discusión. 55. =3. xy + yv + vx + x + y + v = 3xyv v puede expresarse en función de x y y v(3xy – y– x–1)= xy + x + y v=. 𝑥𝑦+𝑥+𝑦 3𝑥𝑦−𝑦−𝑥−1. La relación. 𝐾𝑝 ′ 𝐾𝐼 ′. 1 𝑥𝑦𝑣 1 1 1 + + −1 𝑥𝑦 𝑦𝑣 𝑣𝑥. =. 1 𝑥𝑦𝑣 𝑣+𝑥+𝑦−𝑥𝑦𝑣 = 𝑥𝑦𝑣. se exponer también como: 𝐾𝑝 ′ 𝐾𝐼 ′. 1. =. 𝐾𝑝 ′. 𝑣+𝑥+𝑦−𝑥𝑦𝑣 𝐾𝐼 ′. Sustituyendo v en función de 𝑥 y 𝑦 e invirtiendo la relación Q1=. 𝐾𝐼 ′ 𝐾𝑝. 𝑥𝑦+𝑥+𝑦+1. = 𝑥 + 𝑦 + (1 − 𝑥𝑦) 3𝑥𝑦−𝑥−𝑦−1 ′. Es necesario hallar los valores que maximizan Q1 Hacemos x = y = ∞ los polos P1 y P2 estarán en cero pero el tercer polo P3= estaráfuera del círculo de radio unidad y el sistema será inestable.. 1 𝑣.
Figure
+7
Documento similar