Control predictivo del vuelo de un helicóptero autónomo
97
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control Predictivo del Vuelo de un Helicóptero Autónomo. Autor: Emmanuel Blanco Cañizares E-mail: [email protected]. Tutor: Dr. Miguel Ángel Rodríguez Borroto Dpto. Automática y Sistemas Computacionales Facultad Ingeniería Eléctrica E-mail: [email protected]. Santa Clara 2007 "Año 49 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Cualquier destino, por largo y complicado que sea, consta en realidad de un solo momento: el momento en el que el hombre sabe para siempre quién es. Jorge Luis Borges.
(5) ii. DEDICATORIA. A mis padres que tanto esperaron este momento y siempre me brindaron apoyo, a mis familiares y amigos que me dieron ánimo para continuar..
(6) iii. AGRADECIMIENTOS. Al colectivo de profesores que día tras día dedicaron sus esfuerzos y conocimientos para formarme como profesional, a la profesora Maria Del Carmen por ser una mujer ejemplar, digna de admiración, a mi tutor Miguel por su dedicación y paciencia, a mis compañeros de aula, a todos los que de una u otra forma compartieron estos años en la UCLV con migo, en las buenas y en las malas, a todos ustedes gracias, nunca los olvidare..
(7) iv. TAREA TÉCNICA. •. Estudio cualitativo y cuantitativo del modelado de helicópteros autónomos basado en balances de fuerza y momento.. •. Obtención del modelo de estado linearizado de un helicóptero modelo típico (Yamaha R-50).. •. Estudio de los fundamentos del Control Predictivo basado en el Modelo (MPC) como estrategia computacional básica para el control del vuelo de un helicóptero.. •. Diseño y simulación del sistema de Control Predictivo de un helicóptero aplicando la herramienta MPC de MATLAB.. •. Diseño de un sistema de control de seguimiento para las principales variables de salida del proceso del vuelo de un helicóptero mediante ubicación de polos a través de la realimentación del estado.. •. Valoración cualitativa de los desempeños de ambos sistemas de control.. •. Elaboración de las conclusiones y recomendaciones.. •. Elaboración del informe del trabajo de diploma.. __________________________. ______________________________. Emmanuel Blanco Cañizares Diplomante. Dr. Miguel Angel Rodríguez Borroto Tutor .......
(8) v. RESUMEN. En el presente Trabajo de Diploma se realiza un breve estudio de la tecnología de los helicópteros radio controlados, específicamente un modelo muy parecido al Yamaha R-50, con el objetivo de realizar el control autónomo de vuelo del mismo. Para realizar lo antes expuesto, se dedica un capítulo del presente Trabajo de Diploma al estudio de la teoría del helicóptero y un segundo capitulo al modelado del mismo.. Para el control autónomo del helicóptero se empleo la técnica de Control Predictivo basado en el modelo cuyas siglas en ingles son (MPC) Model Predictive Control, por ser una estrategia de control novedosa usada a nivel mundial en procesos industriales con resultados óptimos y superior incluso que el control proporcional, integral, derivativo (PID). Este control además consta con una poderosa herramienta en MatLab que facilita el trabajo y nos ofrece varias opciones en el momento de la simulación.. Como resultado final del Trabajo de Diploma se presentará el programa de simulación en MatLab, mostrando así todas las posibilidades que ofrece el mismo, ventajas, desventajas y recomendaciones para futuros proyectos..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA................................................................................................................iv RESUMEN .............................................................................................................................v INTRODUCCIÓN ..................................................................................................................1 Organización del informe ...................................................................................................3 CAPÍTULO 1.. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS........4. Introducción ............................................................................................................................4 Teoría del helicóptero .............................................................................................................4 1.1 Estructura ......................................................................................................................5 1.1.1 Estructura de cuerpo fijo y estructura del plano de rotación .................................6 1.1.2 Estructura de tierra y estructura de inercia ............................................................6 1.1.3 Transformación entre las estructuras .....................................................................7 1.1.4 Fuerzas, momentos, velocidades y razones de rotación (velocidades angulares y/o aceleraciones) ...........................................................................................................9 1.2 Rotores ........................................................................................................................11 1.2.1 Rotor principal MR..............................................................................................13 1.2.2 El Rotor de Control..............................................................................................16.
(10) vii 1.2.3 Rotor de cola........................................................................................................17 CAPÍTULO 2.. MODELADO............................................................................................18. Introducción ..........................................................................................................................18 2.1 Introducción general al modelo del helicóptero .........................................................18 2.1.1 Fuerza, momento y ecuaciones cinemáticas ........................................................20 2.1.2 Ecuaciones de fuerza ...........................................................................................21 2.1.3 Ecuaciones de momento ......................................................................................23 2.1.4 EMs Longitudinal y Lateral.................................................................................24 2.1.5 Ecuaciones Cinéticas ...........................................................................................25 2.1.6 Linearización .......................................................................................................26 2.1.7 Rotor de Control ..................................................................................................29 2.1.8 Modelo en el espacio de estado ...........................................................................31 2.1.9 Disturbios.............................................................................................................34 Conclusiones del capítulo .....................................................................................................35 CAPÍTULO 3.. CONTROL PREDICTIVO DEL HELICOPTERO ESTUDIADO..........36. Introducción ..........................................................................................................................36 Introducción al MPC.............................................................................................................37 3.1 Estrategia del MPC .....................................................................................................37 3.2 Elementos del MPC ...................................................................................................39 3.2.1 Modelo de predicción ..........................................................................................40 3.2.1.1 Modelo del proceso.......................................................................................40 3.2.1.2 Modelo del disturbio.....................................................................................45 3.2.2 Función objetivo ..................................................................................................47 3.2.2.1 Parámetros ....................................................................................................47 3.2.2.2 Restricciones.................................................................................................50.
(11) viii 3.2.3 Ley de control ......................................................................................................50 3.3 Sistema de control predictivo del helicóptero.............................................................51 3.3.1 Simulación de diferentes condiciones de vuelo...................................................52 3.3.1.1 Referencia tipo paso para las diez señales de salida.....................................53 3.3.1.2 Provocando condiciones de vuelo más complejas con señales de referencia en forma de pulsos aleatorios durante 2 minutos de vuelo .......................................55 3.3.1.3 Provocando condiciones de vuelo más complejas durante 60 segundos inicialmente y realizando cambios para los siguiente 60 segundos..........................57 3.3.1.4 Ajustando los set-point de y1 (u), y2 (z) y y(5) (w) en forma de pulsos de diferentes amplitudes ................................................................................................59 3.3.1.5 Aumentando el tiempo de simulación de vuelo a 3600 seg (1 hr)................61 3.3.1.6 Simulación de un régimen de vuelo con retorno del helicóptero al punto de partida durante dos horas de vuelo ...........................................................................63 3.3.1.7 Aumentando el tiempo de simulación de vuelo a 7200 seg (2 hr)................65 3.3.1.8 Retorno del helicóptero por la misma ruta....................................................68 3.4 Simulación con parámetros de disturbios ...................................................................70 3.4.1 Simulación con parámetros de disturbios con acción fedforward .......................70 3.4.2 Simulación con parámetros de disturbios sin acción fedforward ........................72 3.5. Comparación con un controlador en base a realimentación del estado .....................73 3.5.1 Sistema de regulación con régimen de vuelo estacionario (referencia cero).......73 3.5.2 Servo sistema con acción integral........................................................................74 3.6 Análisis técnico económico ........................................................................................74 Conclusiones del capítulo .....................................................................................................77 CONCLUSIONES Y RECOMENDACIONES ...................................................................78 Conclusiones.....................................................................................................................78 Recomendaciones .............................................................................................................79 REFERENCIAS BIBLIOGRÁFICAS .................................................................................80.
(12) ix ANEXOS ..............................................................................................................................82 Anexo I .............................................................................................................................82 Anexo II ............................................................................................................................83 Anexo III...........................................................................................................................83 Anexo IV...........................................................................................................................84 Anexo V............................................................................................................................84 Anexo VI...........................................................................................................................85.
(13) INTRODUCCIÓN. 1. INTRODUCCIÓN. Los modelos-escala de helicópteros son plataformas cada vez más populares para los vehículos aéreos sin tripulación. La capacidad de los helicópteros de despegar y de aterrizar verticalmente, de realizar vuelo de la libración así como vuelo de la travesía, y su agilidad y controlabilidad, los hace los vehículos ideales para una gama de usos que pueden ocurrir en una variedad de ambientes.. En el mercado actual a nivel mundial existen muchas marcas de empresas que fabrican helicópteros a radio control entre las más reconocidas tenemos Excell (USA), Hirobo (JAPON), Raptor (Taiwan), Groupner (Alemania), Kyosho (JAPON).. A través de los años 90, la mayoría de los vehículos aéreos sin tripulación utilizaron sistemas de control clásicos tales como el sistema single-loop (lazo simple) PD. Los parámetros del regulador se sintonizan generalmente manualmente para un punto de operación distinto (generalmente vuelo de libración). A estas alturas ello no se justifica. Los modelos dinámicos usados para la síntesis del regulador o la optimización del regulador tienen ciertas exigencias. El modelo debe capturar los efectos que gobiernan el funcionamiento y maniobrabilidad del vehículo. El control con alto ancho de banda requiere modelos de gran exactitud. Para los helicópteros, esto implica que deben explicar explícitamente efectos tales como el acoplador del rotor y el fuselaje. Al mismo tiempo el modelo debe ser bastante simple, ser profundo y práctico para la síntesis del control..
(14) INTRODUCCIÓN. 2. La tecnología aplicada a los helicópteros controlados a distancia a dado un giro de noventa grados con respecto a su avance tecnológico ya que en un extremo existen versiones miniaturas del tamaño de la palma de la mano y en el otro extremo tenemos versiones que trabajan con microturbinas.. En el año 2006 pudimos ver un Helimodelo que tan solo pesaba 50 grs; actualmente se encuentran modelos eléctricos de cualquier tamaño, desde un nivel básico hasta niveles profesionales.. En la actualidad el mayor reto en el helimodelismo es lograr un control de vuelo adecuado, para ello se han empleado varias técnicas de control, como es el caso del control PID y el control Robusto. En este trabajo de diploma se aplicara el Control Predictivo basado en el modelo (MPC) debido a las múltiples ventajas que ofrece el mismo y lo fácil que puede ser aplicado, esta estrategia tuvo su origen en la década de los setenta con sus versiones originales conocidas como control por matriz dinámica (DMC) (Cutler and Ramaker, 1980) y control basado en el algoritmo del modelo (MAC) (Richalet et al, 1978). Actualmente el Control Pedictivo de Procesos (MPC) es el algoritmo computacional más popular que existe para el control de procesos. Su estructura interna se basa en un proceso de optimización que permite calcular el mando y predecir el futuro basado en valores pasados y actuales, ofreciendo un desempeño satisfactoriamente. estable. Además ofrece. una detección temprana de los errores y los corrige.. Existen varios sistemas ya establecidos como los de la firma francesa Adersa y otros, incluso algunos basados en predictores inteligentes, no lineales, basados en redes neuronales y/o lógica difusa..
(15) INTRODUCCIÓN. 3. Organización del informe. Por lo anteriormente planteado se espera facilitar y ofrecer una vía más práctica en el control de vuelo del mini helicóptero modelo Yamaha-R50, mediante el uso de esta técnica de control.. Para esto se divide el presente trabajo en tres capítulos donde se tratan, inicialmente en el Capítulo 1, se hace un estudio de la tecnología del helicóptero Yamaha R-50 usado en el proyecto de la universidad Carnegie-Mellon (CMU) modelo-escala el helicóptero diseñado originalmente para la cosecha-polvoreda, para ello se tomo como referencia el estudio realizado en el Proyecto Colibrí de la Universidad EAFIT de Colombia; en el Capítulo 2, se realiza el estudio del modelo matemático del helicóptero y en el Capítulo 3 se realiza un pequeño estudio de la teoría de Control Predictivo basado en el modelo (MPC); finalmente con toda esta información se realizara la simulación de vuelo del helicóptero con la herramienta MPC de MatLab y además se le aplicara un control por ubicación de polos empleando el Simulink.. El principal objetivo de este trabajo de diploma es realizar una revisión bibliográfica profunda acerca del tema, extender las ventajas del Control Predictivo, con respecto a las otras estrategias de control, usadas en el control de vuelo de Helicópteros Radio Controlados, específicamente en el modelo similar al Yamaha R-50 y realizar pruebas sencillas mediante simulación con algunos sistemas ya establecidos..
(16) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 4. CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. Introducción. En este capítulo se describe muy brevemente la teoría del helicóptero y se da una introducción a los términos usados en este trabajo de diploma. La mayor parte de la aerodinámica, la teoría del helicóptero y los términos, son estándares. El capítulo se subdivide en estructura, secciones de los rotores y modelado. La sección de estructura describe al chasis o cuerpo del helicóptero, la tierra, la estructura de inercia, las fuerzas, los momentos y las velocidades actuando dentro del armazón del helicóptero. La sección del rotor describe cómo los rotores crean estas fuerzas, momentos y velocidades. La sección de modelado describe el modelo matemático del helicóptero con todas las variables presentes en el proceso. Para este capítulo se tomo como fuente de referencia, el modelo hallado por (Kenneth, A. and Jensen, R.), cuando realizaron. el control Robusto para el mismo. helicóptero.. Teoría del helicóptero. Desde un punto de vista físico, un helicóptero se sustenta en el espacio gracias a la masa de aire que es capaz de impulsar mediante sus aspas. Normalmente, dichas aspas o alabes estarán conectadas al rotor principal y son las de mayor tamaño..
(17) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 5. El movimiento rotatorio de las hélices principales ejercerá a su vez una fuerza sobre el cuerpo del helicóptero en sentido contrario a su rotación, haciendo necesario la aparición del habitual rotor de cola (pequeña hélice acoplada en el extremo trasero del cuerpo) que tiene por objetivo compensar dicha fuerza, en otras palabras, el momento angular generado por la hélice horizontal es compensado mediante el impulso de la hélice vertical (y recíprocamente, en menor medida).. En principio es posible tener sólo dos hélices horizontales girando en direcciones contrarias, o en general cualquier número de palas con tal de que el momento angular total sea cero y no haga rotar el fuselaje del helicóptero. Pero esto se complica cuando la masa del aparato es muy pequeña, cualquier fallo en la cancelación hace rotar al helicóptero. Y por otro lado, si hacemos girar una pala más rápida que las demás el helicóptero se inclinará, y las otras deberían acelerar también para compensar, provocando la subida del aparato a no ser que otras deceleren sincrónicamente.. El modelo en cuestión similar al Yamaha R-50 consta de un rotor principal horizontal de dos aspas, además del rotor de control y uno vertical. Como es de suponer el rotor principal no solo sustenta el helicóptero en el espacio sino que ejerce el control de dirección del mismo. Este modelo tiene como ventaja que es fácil de controlar por tener solo una hélice horizontal, pero en cambio la hélice vertical impide que el modelo sea más simple.. 1.1 Estructura. Se eligen las estructuras de una manera tal que las fuerzas, aceleraciones, momentos, vectores, etc., fácilmente puedan estar definidos. El subíndice “E” se refiere a la “estructura de tierra”, el subíndice “B” se refiere al “chasis”, y el subíndice “I” se refiere a la “estructura de inercia”..
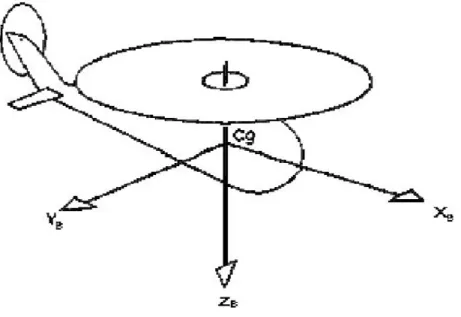
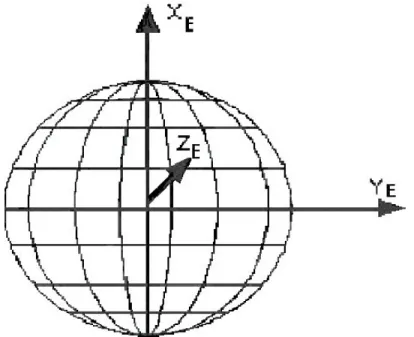
(18) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 6. 1.1.1 Estructura de cuerpo fijo y estructura del plano de rotación. Se utiliza un chasis {B} (véase figura 1.1) porque las fuerzas, los movimientos y las velocidades del helicóptero están actuando en esta estructura. La misma está fijada al cuerpo del helicóptero y se mueve con el fuselaje. El origen se pone en el centro de gravedad, y el eje x B señala directo a través de la nariz, los puntos del eje y B al estribor y los puntos del eje z B abajo.. Fig. 1.1 Estructura del chasis. La estructura del plano de rotación {H} tiene su origen en el centro del rotor principal (MR. Main Rotor) y un constante desplazamiento de {B} pero rotando solamente con el rotor principal.. 1.1.2 Estructura de tierra y estructura de inercia. El origen de la estructura de tierra {E} (véase figura 1.2) está situado en la superficie de la tierra, con el eje x E que señala al norte, el eje yE que señala al este, y el eje zE señalando.
(19) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 7. hacia el centro de la tierra. Al usar el marco {E} se asume que la tierra es plana, que es razonable para las áreas pequeñas. {E} se define principalmente para calcular los desplazamientos del helicóptero usado para la navegación y la dirección. Estas dislocaciones no son necesarias para modelar la dinámica del helicóptero.. Para describir las relaciones entre las fuerzas y las aceleraciones, se utiliza la segunda ley de Newton y esta ley se aplica solamente en el marco de inercia {I}. Para las velocidades lineales relativamente pequeñas y las dislocaciones pequeñas, cuando el helicóptero se encuentra en libración, una simplificación aceptable puede ser la indicación que el marco {E} se puede utilizar como el marco {I}, lo cual no es totalmente exacto pero funciona.. Fig. 1.2 La estructura de tierra {E}. 1.1.3 Transformación entre las estructuras. Para entender la relación entre las estructuras {I} o {E} y {B}, es necesario saber transformar un vector o un punto entre ellas. Esta transformación es hecha por la rotación.
(20) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 8. de una estructura en las otras usando los ángulos de Euler (véase la ecuación 1.1) en el orden dado:. •. Rotación en el eje z, Yaw (ψ), (ángulo de desvío o de resbalamiento).. •. Rotación en el eje z, Pitch (θ), (ángulo de cabeceo).. •. Angulo de giro en el eje x, Roll (φ), (ángulo de enrollamiento o de giro).. ⎡cψ ⋅ cθ ⋅ cφ − sψ ⋅ sφ R = ⎢⎢ sψ ⋅ cθ ⋅ cφ − cψ ⋅ sφ ⎢⎣ − sθ ⋅ cφ. − cψ ⋅ cθ ⋅ sφ − sψ ⋅ cφ − sψ ⋅ cθ ⋅ sφ + cψ ⋅ cφ sθ ⋅ sφ. cψ ⋅ sφ ⎤ sψ ⋅ sφ ⎥⎥ cθ ⎥⎦. (1.1). Simplificación: cθ =cos(θ), sθ =sin(θ).. El ángulo de desvío ψ (véase figura 1.3) es el ángulo entre la proyección del eje x B en el plano horizontal y el eje x E . El ángulo de cabeceo θ es el ángulo entre el eje x B y el plano horizontal. El ángulo de giro φ se mide en el plano de los ejes y B - z B y es el ángulo entre el eje y B y el plano horizontal. Esto se puede también describir en una manera más simple, aunque no es correcto matemáticamente:. •. El ángulo ψ esta rotando sobre el eje z.. •. El ángulo θ esta rotando sobre el eje y.. •. El ángulo φ esta rotando sobre el eje x.. Se definen los ángulos de una manera tal que esa rotación deba estar en el orden Yaw (ψ), Pitch (θ), y Roll (φ) para la transformación de la estructura de inercia a la estructura de chasis y en orden reverso para la transformación de la estructura de chasis a la estructura de inercia..
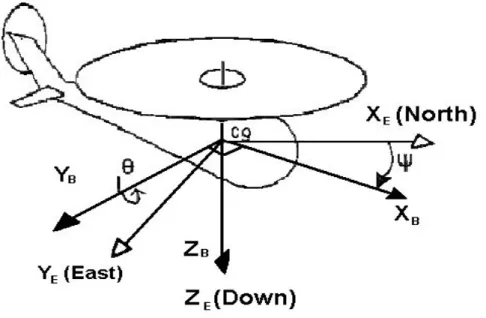
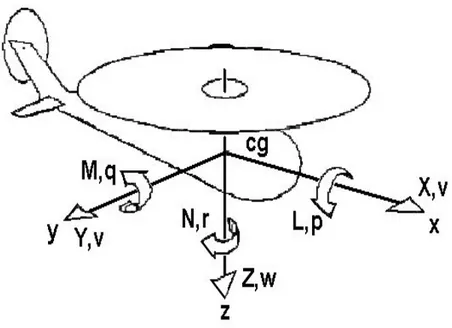
(21) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 9. Fig. 1.3 Ángulos de rotación Yaw (ψ) y Pitch (θ). 1.1.4 Fuerzas, momentos, velocidades y razones de rotación (velocidades angulares y/o aceleraciones). La mayoría de las fuerzas, de las velocidades, de los momentos, de las velocidades angulares, y de las aceleraciones usadas al modelar el helicóptero se definen en la estructura {B} como:. •. X, Y, y Z son las fuerzas lineares en los eje respectivos de {B}.. •. u, v, y w son las velocidades lineares en los respectivos ejes x B , y B , y z B .. •. L, M, y N son los momentos en los respectivos ejes x B , y B , y z B .. •. p, q, y r son las velocidades angulares sobre los respectivos ejes x B , y B , y z B ..
(22) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 10. La figura 1.4 muestra la localización y la dirección de las fuerzas, de los momentos y de las velocidades.. Fig. 1.4 Ejes que conforman el cuerpo del helicóptero, fuerzas, momentos y velocidades. El nombramiento de las diversas piezas del helicóptero se puede considerar en la figura 1.5. El rotor principal (MR) crea un empuje en la dirección negativa del eje z al rotar. Por esto, un momento de torque es generado en la dirección opuesta de la rotación de (MR) que es contrarrestado por el rotor de la cola (TR Tail Rotor). El rotor del control (CR Control Rotor) se utiliza principalmente en el modelo de los helicópteros para agregar amortiguamiento a la dinámica del helicóptero. Al modelar el helicóptero, la fricción en el fuselaje y las fuerzas laterales necesitan ser modeladas debido a los disturbios del viento. La fricción es impuesta por el fuselaje del helicóptero que se mueve en cualquier dirección, por las ráfagas de viento y la estela creada por los rotores..
(23) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 11. Fig. 1.5 Componentes del modelo del helicóptero. 1.2 Rotores. Todas los alabes de los tres rotores tienen la misma aerodinámica que el ala de un avión ordinaria según lo visto en la figura 1.6. El ángulo θ (pitch) es el ángulo de paso o ángulo de inclinado o desplazamiento entre la cuerda (chord) y el plano de rotación {H} que tiene su origen en el centro del rotor principal, en el plano x-y, que también es el plano del vector de la velocidad del viento (V) que actúa en la lámina, donde R es el radio del centro al elemento de lámina y Ω es la velocidad angular del rotor. El ángulo φ se utiliza para describir la relación entre la inclinación inducida (L) y el arrastre (D). El ángulo θ es utilizado para describir la inclinación del fuselaje y los alabes..
(24) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 12. Fig. 1.6 Componentes del modelado de las aspas o hélices. El empuje de propulsión (T) esta determinado por la superposición (suma) de todas las inclinaciones de los alabes del rotor principal. La magnitud del empuje inducido es por lo tanto dependiente del ángulo de cabeceo (θ) y la velocidad angular. Conjuntamente con el cabeceo de alabe, las láminas pueden aletear en un ángulo (β) (véase Fig. 1.7).. Fig. 1.7 Paleta o aspa del helicóptero.
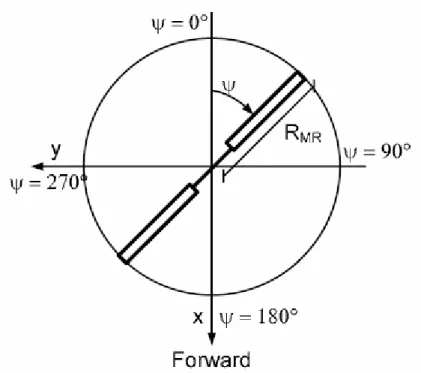
(25) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 13. Estos dos ángulos se utilizan para dirigir el empuje del rotor de tal modo que logre maniobrar el helicóptero. Para mantener normalmente una elevación uniforme a lo largo de la lámina de rotor, a pesar de la diferencia en la velocidad del aire, la lámina se tuerce. Las láminas de rotor usadas en este proyecto no se tuercen, lo que causa más aleteo de las láminas y del rotor, formando un cono.. 1.2.1 Rotor principal MR. Los alabes del rotos principal generan la inclinación o giro del helicóptero. Ello se hace acelerando los aires hacia abajo y por lo tanto generando una contra fuerza hacia arriba (principio de acción y reacción – tercera Ley de Newton). La Fig. 1.8 muestra una vista superior del rotor principal donde el ángulo de acimut ψ es medido desde el eje x donde la popa está en 0º y a favor del sentido en que giran las manecillas del reloj.. Fig. 1.8. Vista superior del rotor principal del helicóptero.
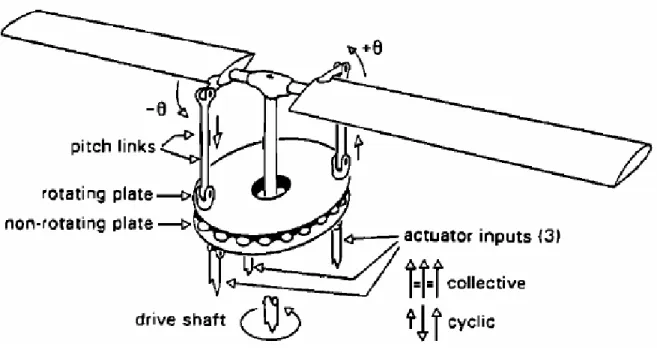
(26) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 14. Los alabes del rotor son fijados al cabezal del rotor y conectados a una placa motriz (swash plate). La distancia desde el cabezal del rotor a la placa motora (Fig. 1.9) controla el ángulo de paso de los alabes del rotor. Moviendo la placa motriz hacia arriba y hacia abajo el paso colectivo de los alabes crea mas o menos fuerza de empuje maniobrando al helicóptero hacia arriba y hacia abajo. Esto se realiza por el piloto usando la palanca colectiva. Inclinando la placa motriz, se obtiene un ángulo cíclico de paso, teniendo en cuenta que ese ángulo de paso será diferente del determinado por el acimut.. El ángulo de la placa motriz es controlado por la barras de control del piloto y le permite a él o a ella controlar el paso de los alabes del rotor de acuerdo hacia dónde sean posicionados los alabes en el cíclico.. Fig. 1.9. Muestra de la placa motriz. Esa variación en el ángulo de paso cambia la magnitud del vector de inclinación del alabe, en dependencia del acimut como se observa en las Figs. 1.10 y 1.11. Cuando el cono del rotor principal se inclina ello redundará en un empuje de inclinación en la misma dirección. Los alabes del rotor en el modelo del helicóptero usado en este trabajo de diploma son de.
(27) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 15. “bisagra de cola de pato” (hinge-less) y flexibles, significando ello que los alabes aletean dependiendo de la fuerza que actúe sobre ellos. Esto significa que los alabes del rotor aleteen dependiendo del ángulo de paso que el sistema de control le imponga. Mediante el seguimiento de la punta del alabe durante un ciclo se observa la formación de un plano, llamado Plano de Paso de la Punta (TPP). Fig. 1.10. Fig. 1.10. Observación del Plano de Paso de la Punta del alabe (TPP) horizontal. Fig. 1.11. Observación del Plano de Paso de la Punta del alabe (TPP) inclinado. Cuando el piloto quiere cambiar la dirección de vuelo lateral o longitudinal, el o ella presiona la barra de control en la dirección que él o ella quiere inclinar el helicóptero y por lo tanto volar en la dirección determinada. La placa motriz sigue a la barra de control con.
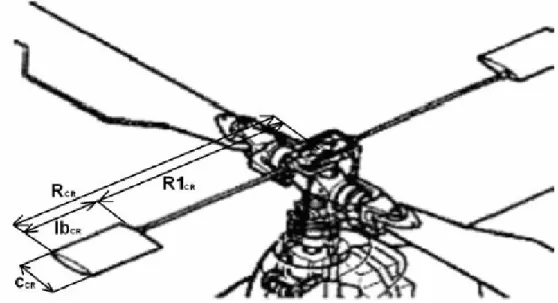
(28) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 16. un defasaje de 90º debido a una dirección giroscópica, respectivamente, y βo describe el ángulo el enconamiento.. 1.2.2 El Rotor de Control. Debido a las pequeñas dimensiones y la rápida velocidad del rotor, el helicóptero modelo es puesto a punto con un rotor de control (Figs.1.12 y 1.5) para disminuir la dinámica del sistema (agregando amortiguamiento). El rotor de control también reduce la potencia necesitada por los actuadotes para manipular la placa motriz.. Fig. 1.12 El rotor de control. Las dinámicas del rotor de control se calculan en base a la cuerda (CCR), el radio interno (R1CR), externo (RCR) y la longitud de la lámina (lbCR)..
(29) CAPÍTULO 1. PRINCIPIO DE FUNCIONAMIENTO DE LOS HELICÓPTEROS. 17. 1.2.3 Rotor de cola. El propósito del rotor de la cola es contrarrestar el esfuerzo de torsión hecho por el rotor principal y controlar el rumbo o dirección. El rotor de la cola se coloca verticalmente en el auge de la cola (brazo del momento), fuera de la estela inducida por el rotor principal. El rotor de la cola tiene solamente una hélice colectiva, que en la mayoría de los helicópteros del mismo tamaño se controlan con los pedales. La Fig. 1.13 muestra un rotor de la cola montado en el fuselaje del helicóptero y todas las medidas necesarias. Las separaciones longitudinal y lateral o transversal es una manera tradicional de describir la dinámica del helicóptero, donde los acopladores cruzados para la mayoría de los aeroplanos se consideran cero.. Fig. 1.13 Fuerzas y momentos actuando en el helicóptero.
(30) CAPÍTULO 2. MODELADO. 18. CAPÍTULO 2. MODELADO. Introducción. Para el “helicóptero Radio-Controlado Yamaha R-50” se usa un modelo de control extendido (EM) que cuenta con diez estados. Primero se da una descripción, con los ocho estados generales del modelo del helicóptero. Las fuerzas y las ecuaciones de los momentos se describen dando por resultado seis ecuaciones con ocho incógnitas separadas en tres ecuaciones longitudinales y tres laterales. Las ecuaciones cinemáticas entonces se agregan para describir el sistema, ahora en ocho ecuaciones con ocho incógnitas. Estas ocho ecuaciones entonces se linearizan y las dos ecuaciones de los rotores de control se describen y se agregan para componer el EM del sistema. La matriz de estado y de entrada ahora consiste en un total de 48 términos derivativos de estados y de 26 términos derivativos de entradas. El elemento diferenciado parcial más influyente será descrito en detalles. Finalmente se deriva la planta de la incertidumbre para el regulador encontrando las inexactitudes de los sistemas, y las especificaciones del funcionamiento así como los disturbios del mismo.. 2.1 Introducción general al modelo del helicóptero. Un modelo del helicóptero consiste normalmente de un total de cuatro entradas y de ocho estados. La energía del motor es controlada normalmente por el gobernador de motor para mantener una velocidad angular constante de los rotores y esto se considera un lazo de.
(31) CAPÍTULO 2. MODELADO. 19. control por separado, que también será utilizado en el modelo del helicóptero de este proyecto. Seguidamente los lazos de control mecánicos, el hardware, y el software se asumen rápidos en comparación a la dinámica del cuerpo-rígido del helicóptero y por lo tanto se desprecian. La dirección (o el ángulo yaw) y la posición (las coordenadas x, y, z) del helicóptero no tienen ninguna influencia en la dinámica del sistema (las fuerzas y los momentos) y por lo tanto no se tienen en cuenta dentro de los estados del modelo de espacio. Estos “estados dejados fuera” son controlados normalmente por el piloto o un sistema de la dirección y de navegación (piloto automático) como lazos de control por separado. Las entradas y las salidas del modelo general usado en este trabajo de diploma son:. Entradas: δe (ángulo de cabeceo colectivo del rotor principal) δc (ángulo de cabeceo cíclico longitudinal) δa (ángulo de cabeceo cíclico lateral) δp (ángulo de cabeceo colectivo del rotor de la cola). Salidas: u (velocidad longitudinal a lo largo del eje x) v (velocidad lateral a lo largo del eje y) w (velocidad vertical de la subida de la pendiente a lo largo del eje z) φ (ángulo de giro, rotación sobre el eje x) θ (ángulo de cabeceo, rotación sobre el eje y) p (razón angular de giro (velocidad angular), rotación sobre el eje x) q (razón angular de cabeceo (velocidad angular), rotación sobre el eje y) r (razón angular de desvío (velocidad angular), rotación sobre el eje z).
(32) CAPÍTULO 2. MODELADO. 20. Las relaciones de la entrada-salida serán descritas en un modelo de espacio de estado: .. x = A ⋅ x + B ⋅u. (2.1). y = C ⋅ x + D ⋅u. (2.2). Donde el estado x y el estado u están dados por:. x = [u w q θ v p φ r]. (2.3). u = [δ e. (2.4). T. δc. δa. δ p ]T. Las cuatro entradas controlan cuatro de las salidas directamente, porque las restantes podrían ser controladas inferencialmente. El δ e de entrada controla la velocidad vertical w de subida/bajada a lo largo del z-eje lo que provoca el cabeceo de las láminas colectivamente. El δc y el δa de entradas controlan la razón angular roll p y razón angular pitch q respectivamente, y el δp de entrada controla la razón angular yaw r. Ésta es por supuesto una simplificación de las relaciones entre la entrada y la salida. Las relaciones de la entrada-salida serán descritas más adelante. Las matrices que resultan de A, B, C, y D del modelo de espacio de estado se muestran en el anexo I.. 2.1.1 Fuerza, momento y ecuaciones cinemáticas. Para desarrollar el modelo de un helicóptero las ecuaciones de los movimientos (EM) necesitan ser desarrolladas de tal manera que consistan en las ecuaciones de la fuerza y del momento, que junto con las ecuaciones cinemáticas compongan el modelo de espacio de estado. Las ecuaciones diferenciales no lineales se recolectan en las EMs longitudinal y lateral y después se linearizan, y las diversas contribuciones que componen las fuerzas y los.
(33) CAPÍTULO 2. MODELADO. 21. momentos del total entonces se describen y finalmente se recolectan en un modelo de estado del helicóptero.. 2.1.2 Ecuaciones de fuerza. Las ecuaciones de la fuerza consisten en la respuesta del helicóptero en términos de aceleración, donde XT, YT, y ZT son las sumas de las fuerzas aplicadas al sistema en los ejes respectivos. Se considera que el helicóptero es un cuerpo rígido y que la masa es constante, lo que es razonable en una duración relativamente corta del tiempo. Por esto, la segunda ley de Newton puede ser utilizada:. F = m⋅a. (2.5). La segunda ley de Newton trabaja solamente en la estructura de inercia (si se tiene en cuenta que la masa es una medida de la inercia de un cuerpo, mientras más masa tenga un cuerpo más difícil es cambiar su estado de movimiento), pero las fuerzas y los momentos se aplican en el chasis y por lo tanto es necesaria una transformación:. .. at = VB + wB ⋅ VB. (2.6). Donde VB (2.7) y wB (2.8) se describen en el sistema de ejes del cuerpo, que está rotando con respecto a la estructura de inercia de la referencia:. ⎡U ⎤ VB = ⎢⎢ V ⎥⎥ ⎢⎣W ⎥⎦ B. (2.7).
(34) CAPÍTULO 2. MODELADO. ⎡P⎤ wB = ⎢⎢Q ⎥⎥ ⎢⎣ R ⎥⎦ B. 22. (2.8). Esto da la adición a las fuerzas aplicadas XT, YT, y ZT del sistema descrito en las direcciones de x, y, z del sistema de ejes del cuerpo respectivamente:. ⎡. ⎤ − ⋅ + ⋅ U R V Q W ⎢. ⎥ ⎡XT ⎤ FT = m ⋅ ⎢V − P ⋅ W + R ⋅ U ⎥ = ⎢⎢ YT ⎥⎥ ⎢. ⎥ ⎢W − Q ⋅ U + P ⋅ V ⎥ ⎢⎣ Z T ⎥⎦ ⎢⎣ ⎥⎦. (2.9). Una de las fuerzas que contribuye a la resultante total de las fuerzas aplicadas XT, YT, y ZT, es la gravedad que se puede derivar por una transformación de la fuerza de la gravedad ( F g ) E (2.10) en la estructura de tierra a estructura en chasis ( F g ) B (2.11).. (F ). = m⋅ g. (2.10). (F ). ⎡ − sin Θ ⎤ = m ⋅ g ⋅ ⎢⎢ sin Φ ⋅ cos Θ ⎥⎥ ⎢⎣cos Φ ⋅ cos Θ⎥⎦. (2.11). g E. g B. Donde los ángulos Φ y Θ refieren a la rotación de la estructura chasis con respecto a la estructura de tierra (el ángulo de giro y de cabeceo respectivamente). La fuerza de la gravedad se puede entonces separar de las otras fuerzas aplicadas, e.j., XT =XR m g sin Θ . Esta parte entonces se substituye en las EMs longitudinal y lateral según lo considerado abajo en las ecuaciones (2.19) y (2.20)..
(35) CAPÍTULO 2. MODELADO. 23. 2.1.3 Ecuaciones de momento. Las ecuaciones del momento se pueden describir de la misma forma que las ecuaciones de la fuerza, cambiando la estructura de cuerpo por la estructura de inercia. La impulsión angular que resulta H. B. es producto de la inercia I B y velocidad angular w B . La inercia. aquí se describe en la forma de la matriz (2.13) y la velocidad angular en la forma del vector w B (2.8).. H B = I B ⋅ wB ⎡ I XX I = ⎢⎢− I XY ⎢⎣ − I XZ. − I XY. − I XZ ⎤ − I YZ ⎥⎥ I ZZ ⎥⎦ B. I YY − I YZ. (2.12). (2.13). Si se considera el plano x-z simétrico y por lo tanto fijamos Ixy = 0 e Iyz = 0 esto conduce a la impulsión angular:. ⎡P⋅ IXX −R⋅ IXZ⎤ HB = ⎢⎢ Q⋅ IYY ⎥⎥ ⎢⎣R⋅ IZZ −P⋅ IXZ⎥⎦B. (2.14). •. La razón de cambio de la impulsión angular H I según lo visto en la estructura de inercia puede entonces ser descrito como el derivado de H B (2.14) y sumándolo con el producto cruzado de la velocidad angular y de la impulsión angular en el chasis: •. •. H I = H B + wB ⋅ H B. (2.15).
(36) CAPÍTULO 2. MODELADO. 24. Si se considera que la distribución en masa del helicóptero es constante (sin tener en cuenta •. el chapotear del combustible), eso significa que I XX = 0 , I YY = 0 y I ZZ = 0 , H I puede ser •. dado por (2.18) usando la forma corta de H B (2.16) y la forma corta de w B ⋅ H B (2.17).. • • • • ⎡• ⎤ ⎡• ⎤ ⋅ − ⋅ + ⋅ P ⋅ I − R ⋅ I P I R I P I XX − R ⋅ I XZ XX XZ XX XZ ⎢ ⎥ ⎢ ⎥ • • • • ⎢ ⎥ ⎢ ⎥ = Q⋅ I YY HB = Q⋅ I YY + Q ⋅ I YY ⎢• ⎥ ⎢• ⎥ • • • • ⎢ R⋅ I ZZ − P⋅ I XZ + R ⋅ I ZZ − P ⋅ I XZ ⎥ ⎢ R⋅ I ZZ − P⋅ I XZ ⎥ ⎢⎣ ⎥⎦ B ⎢⎣ ⎥⎦ B. Q ⋅ ( R ⋅ I ZZ − P ⋅ I XZ ) − R ⋅ Q ⋅ I YY ⎡ ⎤ w B ⋅ H B = ⎢⎢ R ⋅ ( P ⋅ I XX − R ⋅ I XZ ) − P ⋅ ( R ⋅ I ZZ − P ⋅ I XZ )⎥⎥ ⎢⎣ ⎥⎦ B P ⋅ Q ⋅ I YY − Q ⋅ ( P ⋅ I XX − R ⋅ I XZ ). • ⎡• ⎤ P I Q R I I R P Q I ( ) ( ) ⋅ + ⋅ ⋅ − − + ⋅ ⋅ XX ZZ YY XZ ⎡L⎤ ⎢• ⎥ • H I = ⎢ Q⋅ IYY − P ⋅ R ⋅ ( I ZZ − I XX ) + ( P 2 − R 2 ) ⋅ I XZ ⎥ = ⎢⎢M ⎥⎥ ⎢• ⎥ • ⎢⎣ N ⎥⎦ I ⎢ R⋅ I ZZ + P ⋅ Q ⋅ ( IYY − I XX ) + (Q ⋅ R ⋅ P) ⋅ I XZ ⎥ ⎢⎣ ⎥⎦ B. (2.16). (2.17). (2.18). 2.1.4 EMs Longitudinal y Lateral. Las ecuaciones de la fuerza y del momento se pueden ahora obtener como EMs longitudinal y lateral. Las EMs longitudinal (2.19) se definen como la fuerza de X, momento de M, y la fuerza de Z, y las EMs lateral (2.20) como la fuerza Y, momento L, y el momento N..
(37) CAPÍTULO 2. MODELADO. 25. EMs Longitudinal •. X R − m ⋅ g ⋅ sin Θ = m ⋅ (U − R ⋅ V + Q ⋅ W ) •. M = Q ⋅ I YY − P ⋅ R ⋅ ( I ZZ − I XX ) + ( P 2 − R 2 ) ⋅ I XZ •. (2.19). Z + m ⋅ g ⋅ cos Φ ⋅ cos Θ = m ⋅ (W − Q ⋅ U + P ⋅ V ). EMs Lateral •. L = P ⋅ I XX + Q ⋅ R ⋅ ( I ZZ − I YY ) − ( R + P ⋅ Q ) ⋅ I XZ •. Y + m ⋅ g ⋅ sin Φ ⋅ cos Θ = m ⋅ (V − P ⋅ W + R ⋅ U ) •. •. (2.20). N = R⋅ I ZZ + P ⋅ Q ⋅ ( I YY − I XX ) + (Q ⋅ R − P ) ⋅ I XZ. 2.1.5 Ecuaciones Cinéticas. Según las consideraciones hechas en la sección anterior los estados cinemáticos son una parte importante de las EMs. Por lo tanto es necesario incluirlos en el modelo de espacio de estado. Las seis EMs con ocho variables desconocidas terminarán agregando las ecuaciones cinemáticas de ocho ecuaciones con ocho incógnitas que puedan ser solucionadas. Las tres ecuaciones cinemáticas son obtenidas relacionando las tres razones P, Q, y R del sistema de •. •. •. ejes del cuerpo con las tres razones de Euler Φ , Θ , y ψ. en el sistema de ejes de la. tierra. Obsérvese que son justamente las razones de cambio (derivadas) respecto al tiempo de los ángulos de Euler. Así se obtiene la transformación del sistema de ejes de la tierra al sistema de ejes del cuerpo: •. •. P = −ψ ⋅ sin Θ + φ •. •. •. •. Q = ψ ⋅ sin Φ ⋅ cos Θ + Θ ⋅ cos Φ R = ψ ⋅ cos Φ ⋅ cos Θ − Θ⋅ sin Φ. (2.21).
(38) CAPÍTULO 2. MODELADO. 26. Estas ecuaciones serán sustituidas más adelante en otras y rescritas en una forma linearizada según lo considerado abajo en (2.28).. 2.1.6 Linearización. Las EMs lateral y longitudinal son ecuaciones diferenciales no lineales, consideradas para tener solamente perturbaciones pequeñas y puede por lo tanto ser linearizadas usando una pequeña perturbación aproximada (Aproximación usando la expansión en series de Taylor de la función no lineal en un número de puntos) y facilitar la definición de soluciones.. Primero consideramos que el helicóptero esta en vuelo perturbado, lo cual es un estado normal de operación, estas perturbaciones pueden ser en las variables de fuerza y en los momentos del movimiento del helicóptero. La fuerza “X “será linearizada según lo considerado en: (2.22), (2.24), (2.25), y (2.26). •. X R − m ⋅ g ⋅ sin Θ = m ⋅ (U − R ⋅V + Q ⋅W ). (2.22). Cada variable del movimiento, ángulo de Euler, fuerza, y momento en las EMs se redefinen como una superposición de un valor del estado constante (Los símbolos mayúsculos con subíndice “0”. Eje. X0) y de un valor perturbado igual a los estados del sistema (símbolos minúsculos):. XR = XO + X U = UO + u V = VO + v W = WO + w Q = QO + q R = RO + r Θ = ΘO + θ. (2.23).
(39) CAPÍTULO 2. MODELADO. 27. Substituyendo (2.23) en (2.22) tenemos: • ⎡• ⎤ m⎢U O + u + (QO + q)(WO + w) − ( RO + r )(VO + v)⎥ = −mg ⋅ sin(Θ O + θ ) + X O + x ⎣ ⎦. (2.24). Considerando pequeñas perturbaciones (valores pequeños para x, u, v, w, q, r, θ, etc.) y ángulos pequeños en las funciones trigonométricas de los ángulos perturbado fijados: cosθ≈1 y sinθ≈θ (en radianes). Los productos de perturbaciones pequeñas también se consideran insignificantes fijando a . b≈ 0 y las ecuaciones del estado constante se quitan de la ecuación perturbada, dejando las ecuaciones perturbadas como ecuación diferencial linearizada con las ocho variables (u, v, w, p, q, r, θ y φ) quedando como incógnitas las perturbaciones de las variables alrededor del estado estable.. ⎡• ⎤ m ⎢u − VO r − RO v + WO q + QO w⎥ = −mgθ ⋅ cos Θ O + X ⎣ ⎦. (2.25). Además las ecuaciones se simplifican con la asunción de una condición del estado constante y de un eje cuerpo-fijo de la estabilidad que fijan P0 =Q0 =R0 =0 lo cual da el EMs linearizado y simplificado dado en: (2.26) y (2.27).. EMs longitudinal, linearizado y simplificado •. u = −WO q − gθ cos Θ O + VO r + •. q= •. X GM m. M GM I YY. w = U O q − gθ cos Φ O sin Θ O − VO p − gφ sin Φ O cos Θ O +. (2.26) Z GM m.
(40) CAPÍTULO 2. MODELADO. 28. EMs lateral, linearizado y simplificado •. p=. I ZZ L + I XZ N = L'GM 2 I XX I ZZ − I XZ. •. v = − gθ sin Φ 1 sin Θ1 + WO p + gφ cos Φ 1 cos Θ1 + U O r + •. r=. YGM m. (2.27). I XZ L + I XX N ' = N GM 2 I XX I ZZ − I XZ. Las EMs de tal modo nos queda con seis ecuaciones y ocho incógnitas pero usando las ecuaciones cinemáticas, agregamos dos ecuaciones adicionales, quedando en total ocho ecuaciones con ocho incógnitas, donde el resto de las EMs y las ecuaciones cinemáticas se linearizan de la misma forma que está descrito para la fuerza de X. Las ecuaciones cinemáticas linearizadas se pueden considerar en: (2.28).. Ecuación cinética linearizada y simplificada. •. θ = q cos Φ O − r sin Φ O •. φ = q sin Φ O tan Θ O + r cos Θ O tan Θ O + p. (2.28). Finalmente el modelo queda con ocho ecuaciones (fuerza y momento cinemático) con ocho incógnitas.. Donde:. X GM YGM Z y GM están definidas como: , m m m.
(41) CAPÍTULO 2. MODELADO. 29. Xq Xp Xδp X GM X u X X X X X X = u + w w+ q+ v v+ p + r r + δe δe + δc δc ⋅ kMR + δa δa ⋅ kMR + δp m m m m m m m m m m m Yq Yp YGM Yu Y Y Y Y Y Y = u + w w + q + v v + p + r r + δe δe + δc δc ⋅ kMR + δa δa ⋅ kMR − δp ⋅ g sinΦ1 sinΘ1 m m m m m m m m m m Zq Zp Zδp ZGM Zu Z Z Z Z Z Z = u + w w+ q + v v + p + r r + δe δe + δc δc ⋅ kMR + δa δa ⋅ kMR + δp m m m m m m m m m m m (2.29) Y donde L'GM ,. M GM ' , y N GM están definidas por: I YY. L'GM = L'uu + L'ww+ L'qq + L'vv + L'p p + L'r r + L'δeδe + L'δckMR⋅δc + L'δakMR⋅δa + L'δp ⋅δp Mδp MGM Mu Mw Mq Mv Mp M M M M p + r r + δe δe + δc kMR⋅δc + δa kMR⋅δa + δp = u + w+ q + v + IYY IYY IYY IYY IYY IYY IYY IYY IYY IYY IYY ' NGM = Nu' u + Nw' w+ Nq' q + Nv' v + Np' p + Nr' r + Nδ'eδe + Nδ'ckMR⋅δc + Nδ'akMR⋅δa + Nδ'p ⋅δp. (2.30) Donde las notaciones con subíndice e.j. Xu refieren a la ecuación diferencial parcial: Xu =. ∂X ∂u. (2.31). 2.1.7 Rotor de Control. Hasta este momento el helicóptero se ha descrito por un modelo del espacio de estado en ocho estados que se considera como el modelo general del helicóptero. La mayoría de los helicópteros modelo utilizan un rotor del control para un control físico mejor, que también es el caso del helicóptero usado en este Trabajo de Diploma. El rotor de control ayuda a los actuadores para mover la placa motriz en la posición, pero también agrega amortiguamiento al movimiento. El amortiguamiento es necesario porque la velocidad angular del rotor de un helicóptero modelo es mucho más alta que para un helicóptero de mayor tamaño (150 rad/s. comparado típicamente con 20 rad/s.) dando una dinámica mucho más rápida al modelo del helicóptero que es más difícil de controlar para el piloto operador. La dinámica del rotor del control es agregada al sistema añadiendo dos nuevos estados al modelo de.
(42) CAPÍTULO 2. MODELADO. 30. espacio de estado, tratando el rotor de control como “rotor de suplemento” al rotor principal.. Modelado. Utilizando las características aerodinámicas de la lámina de los helicópteros de plena escala, despreciando la dinámica en altas frecuencias y considerando pequeño el ángulo de aleteo se obtiene: •. βC+ •. βS+. γΩ ξ 16. γΩ ξ 16. βC = βS. ⎞ γ Ω ξ ⎛ θ O , CR p ⎜⎜ − δ c ⎟⎟ − q u+ Ω 16 ⎝ γ Ω ξ R ⎠. θ ⎞ q ⎜⎜ − O , CR v − = − − δ a ⎟⎟ − p Ω 16 ⎝ γ Ω ξ R ⎠ γΩ ξ ⎛. (2.32). La inclinación lateral y longitudinal del plano de la trayectoria de la extremidad de los rotores de control se considera que es igual a los ángulos de la inclinación de la placa motriz:. β C = −δc. y. β S = δa. (2.33). La implementación práctica y el uso del modelo del rotor de control no es tomado en cuenta según lo planteado por (Pershinschi, 1998) y (Munzinger, 1998), por esto nuevamente se hacen los cálculos paso a paso que conducen al modelo, rectificando algunos errores encontrados en ¨βS ¨ para el modelo cuando se emplea el rotor de control. Las EMs lateral y longitudinal del modelo general también son afectadas por el rotor de control, por lo tanto es necesario agregar su contribución a los momentos (2.30) y a las fuerzas (2.29). Notar que la contribución está calculada usando las mismas ecuaciones diferenciales según lo utilizado para el rotor principal, substituyendo el δc de las entradas y el δa del rotor principal por el βC de los estados y el β S que conduce a:.
(43) CAPÍTULO 2. MODELADO. 31. Momentos. L'EM = L'GM + L'δc k β βC + L'δa k β β S M M EM M GM M δc k β ⋅ βC + δa k β ⋅ β S = + I YY I YY I YY I YY. (2.34). ' ' N EM = NGM + Nδ' c k β βC + Nδ' a k β β S. Fuerzas:. X X EM XGM Xδc = + kβ ⋅ βC + δa kβ ⋅ βS m m m m Y YEM YGM Yδc = + kβ ⋅ βC + δa kβ ⋅ βS m m m m Z ZEM ZGM Zδc = + kβ ⋅ βC + δa kβ ⋅ βS m m m m. (2.35). 2.1.8 Modelo en el espacio de estado. El modelo de estado ahora consiste en una matriz A de orden 10×10 y una matriz de entrada B de orden 10×4, que se pueden considerar en el anexo I y (2.36-2.38) con todas sus ecuaciones diferenciales. El sistema del helicóptero puede ser considerado como un “Sistema de Múltiples Grados de Libertad” descrito por un número de ecuaciones tipo “Masa-Muelle-Amortiguador”.. 4×4 4×4 4×2 ⎡ Alongitudin ⎤ Aint Alongitudin al erconector al,rotor⋅de⋅control × 10 1 ⎢ ⎥ 4×4 4×4 4×2 Aint Alateral Alateral ⎡•⎤ erconector , rotor⋅de⋅control ⎥ ⎢ ⎢x⎥ = ⎢ 1×10 ⎥ Alongitudin al, rotor⋅de⋅control ⎣ ⎦ ⎢ ⎥ 1×10 Alateral ,rotor⋅de⋅control ⎣⎢ ⎦⎥. [y ]. 10×1. = [I ]. 10×10. ⋅ x + [0]. 10×10. 10× 4. 10×4. 4×4 ⎡ ⎤ Blongitudin al ⎢ ⎥ 4×4 Blateral ⎢ ⎥ ⋅u ⋅ x + 1×4 ⎢Blongitudinal,rotor⋅de⋅control ⎥ ⎢ 1×4 ⎥ ⎣⎢ Blateral,rotor⋅de⋅control ⎦⎥ (2.36). ⋅u. (2.37).
(44) CAPÍTULO 2. MODELADO. 32. Donde x y u ahora están definidas como:. x = [u w q θ. p φ. v. u = [δe δc δa δp ]. r. βC. T. β S ]T. (2.38). Ecuaciones en Derivadas Parciales. El modelo de estado consiste en un total de 48 términos derivativos de estado y de 26 términos derivativos de entradas según lo considerado en el anexo I. Estas ecuaciones diferenciales se muestran en el programa de simulación. La mayor parte de los términos derivativos utilizan la ecuación general del empuje (2.39). Esta ecuación se basa en la ecuación general de la elevación para las alas de un avión, donde las rotaciones de los alabes (alas), considerado el número de las alabes (b) dan por resultado la “elevación total” o el empuje (t) aplicado al helicóptero. T = ρ ⋅ Ab ⋅ (V ) 2 ⋅ CT / σ Ab = b ⋅ c ⋅ R, V = Ω ⋅ R, y σ =. donde: T. Impulsión (lb). Ρ. Densidad del aire (slugs/ft 3 ). Ab. Área total de las ala (ft 2 ). V. Velocidad (ft/s.). b. Numero de alas (entero). c. Acorde(ft). Rm. Radio (ft). Ω. Velocidad Angular (rad/s.). CT. Coeficiente de impulsión (constante). σ. Razón de consistencia del rotor (constante). (2.39) b⋅c⋅ R π ⋅ R2. (2.40).
(45) CAPÍTULO 2. MODELADO. 33. Esta ecuación es usada para ambos rotores el principal y el de la cola. Cuando se distribuye la influencia de los rotores principales de ángulo paso (δe) colectivo, en la velocidad vertical (w), la ecuación es negativa porque el eje z del chasis es hacia abajo. Si se considera que el δe es la única entrada y el sistema está en estado estable tenemos que:. w=. Z δe ∂C / σ = − ρAbMR (Ω MR RMR ) 2 TMR MR m ∂δe. (2.41). La ecuación del empuje se multiplica con el cambio de las láminas colectivas en el ángulo paso δe. Ambas derivadas de los coeficientes del empuje y del esfuerzo de torsión (2.42) se derivan originalmente de varias pruebas del túnel de viento dando por resultado un número de gráficos enumerados (Prouty, 2003 p.81). Estos gráficos se utilizan en los helicópteros de mayor tamaño pero las pruebas se hacen en parte con los modelos escalados, y se puede considerar que hay semejanza con el helicóptero modelo de Futura SE que ha sido utilizado en este trabajo de diploma. ∂ (CT / σ ) ∂ (C O / σ ) y ∂e ∂e. (2.42). Los 48 términos derivativos de estado y los 26 términos derivativos de las entradas utilizadas en este trabajo se toman de (Prouty, 2003 p.564), pero teniendo en cuanta el modelo del rotor del control de (Pershinschi, 1998). Haciendo de nuevo los cálculos paso a paso que conducen a las derivadas parciales, obtenemos las derivadas parciales correctas (2.43), que también toman la rotación a la derecha del rotor principal en consideración:. 3 N v , MR = −2 ⋅ ρ ⋅ Ab , MR ⋅ Ω MR ⋅ RMR ⋅ C Q , MR / σ MR. ∂ (CT ,TR / σ TR ) ∂λ' ⋅ ⋅ hTR ∂v ∂λ' ∂ (C Q ,TR / σ TR ) ∂λ' 2 ⋅ RTR ) ⋅ R ⋅ ⋅ ∂v ∂λ'. Lv ,TR = − ρ ⋅ Ab ,TR ⋅ (Ω TR ⋅ RTR ) 2 ⋅ M v ,TR = − ρ ⋅ Ab ,TR ⋅ (Ω TR. (2.43).
(46) CAPÍTULO 2. MODELADO. 34. Controlabilidad y observancia. La controlabilidad del estado ha sido investigada, así como la observabilidad (Chen 1999, p.144 y p.153) resultando las ecuaciones de controlabilidad y observabilidad de Kalman (2.44 y 2.45):. (B. AB. A 2 B ........ ). A 9 B = 10. ⎛⎡ C ⎤⎞ ⎜⎢ ⎥⎟ ⎜ ⎢ CA ⎥ ⎟ ⎜ ⎢CA 2 ⎥ ⎟ = 10 ⎜⎢ ⎥⎟ ⎜⎢ Μ ⎥⎟ ⎜⎢ 9 ⎥⎟ ⎝ ⎣CA ⎦ ⎠. (2.44). (2.45). Ambas matrices poseen rango pleno y por lo tanto el estado del sistema es controlable y observable para el caso especifico de este helicóptero modelo. Los cálculos fueron hechos en Matlab usando las funciones ctrb (A, B); y obsv (A, C).. 2.1.9 Disturbios. Además de incertidumbres en la distribución en masa, el viento lateral es el disturbio más grande al sistema (Ulrich, 2005). Cuando el helicóptero es influenciado especialmente por un viento de cola, el sistema actúa como un palillo que se balancea y está por lo tanto en la posición más inestable. Esto es lo contrario a un viento principal, donde el sistema actúa como en vuelo y el sistema está por lo tanto en la posición más estable debido a los estabilizadores verticales y horizontales respecto al auge de la cola. Esto significa que el helicóptero es influenciado por un disturbio del viento principal o contrario a ráfagas con una velocidad angular de 0.628 rad/s y una magnitud entre + - 3.3 ft/s..
(47) CAPÍTULO 2. MODELADO. 35. Conclusiones del capítulo. Para compensar las incertidumbres en la distribución de masa y en el parámetro total y de tal modo parámetros del CG y de la inercia, hay que considerar robustez en el diseño de cualquier controlador que se utilice ya sea PID, H, H2, Predictivo, etc. De tal modo que los reguladores puedan garantizar estabilidad dentro del área de parámetro manejando ambos cambios el lineal y el abrupto:. Abrupto: 2.3 libras. (debido a la carga útil) Linear: 1.1 libras en 120 s. (debido a la consumición de combustible). El disturbio lateral del viento se debe manejar por un regulador predictivo para ocuparse del cambio en empuje del rotor de la cola, los momentos del rodillo debido al efecto dihedral y giroscópico del rotor principal, y la fuerza de fricción del fuselaje, con un disturbio lateral del viento hasta:. Frecuencia de la ráfaga de 0.628 rad/s. Magnitud de la ráfaga de 3.3 ft/s. Turbulencia estocástica de 0.33 ft/s., del valor medio 0, y de una variación 0.7.
(48) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 36. CAPÍTULO 3. CONTROL PREDICTIVO DEL HELICOPTERO ESTUDIADO. Introducción. El control predictivo basado en el modelo (MPC) tuvo su origen en la década de los setenta con sus versiones originales conocidas como control por matriz dinámica (DMC) (Cutler and Ramaker, 1980) y control basado en el algoritmo del modelo (MAC) (Richalet et al, 1978). Actualmente el Control Pedictivo de Procesos (MPC) es el algoritmo computacional más popular que existe para el control de procesos industriales. Su estructura interna se basa en un proceso de optimización que permite calcular el mando y predecir el futuro basado en valores. pasados y actuales, ofreciendo un desempeño satisfactoriamente. estable. Además ofrece una detección temprana de los errores y los corrige.. Existen muchas variantes de estos métodos computacionales para el control que incluyen variantes de MPC lineales y no lineales (NMPC) (Allower and Zheng, 2000), se reportan más de 2000 aplicaciones prácticas de estos algoritmos (Badwell and Qin, 2000) y más del 90% de las implementaciones de controles en sistemas multivariables son MPC (Lu, 2000).. Para la realización de este capítulo se tomo la información de la conferencia magistral al “III Seminario de Automatización Industrial. Actualidad y Perpespectivas”, (Miguel A. Rodríguez, 2004).
(49) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 37. En el presente capitulo se realiza un resumido estudio de la teoría de control predictivo basado en el modelo MPC. El objetivo es aplicar esta técnica de control al modelo del helicóptero en cuestión, observar los resultados que se obtienen mediante simulación y compararlos con los resultados que se obtienen al controlar mediante realimentación del estado basado en asignación de polos, para esto se empleara el software MatLab, herramienta computacional tradicional en el control de procesos.. Introducción al MPC. El control predictivo basado en el modelo más que una estrategia de control específica, es una amplia gama de métodos de control basados en una idea común” (Camacho y Bordóns, 1995). Esos métodos de diseño conducen a controladores lineales los cuales poseen la misma estructura y presentan adecuados grados de libertad. Su basamento radica en el uso explícito de un modelo para predecir la salida del proceso en futuros instantes de tiempo (horizonte de predicción), en el cálculo de una secuencia de control que minimiza cierta función objetivo (control óptimo) durante un número determinado de períodos de muestreo a lo cual se denomina horizonte de predicción. Y en base a la estrategia de horizonte residente en cada instante, dicho horizonte se puede desplazar hacia el futuro. Ello implica tener que aplicar la primera señal de control de la secuencia calculada en cada paso o instante de muestreo.. 3.1 Estrategia del MPC. El método del MPC se basa en la estrategia mostrada en la Fig.3.1.
(50) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 38. Fig.3.1. La salida y para un horizonte N, (horizonte de predicción), es predicha en el instante t. Esta salida predicha para. k = 1, 2,…., N depende de los valores anteriores conocidos de la. salida misma y de las futuras acciones de control en k = 0, 1,…..,N-1. El conjunto de movimientos futuros de la señal de control u se calculan mediante un criterio que se establece para mantener la salida del proceso lo más cerca posible de la señal de referencia o set point w(t+k) establecida a prioridad. La señal de control u(t|t) se aplica al proceso mientras que las demás variaciones calculadas son rechazadas.. En el próximo instante de muestreo se calcula y(t+1) a partir de la secuencia anterior y de la misma salida y actualmente medida. Se actualiza de nuevo el mando y se obtiene u(t+1|t+1), valor que será diferente de u(t+1|t) (calculado en el instante anterior); debido. al uso del concepto de horizonte residente. En la Fig. 3.2 se muestra el esquema básico operacional para la implementación de la estrategia.. El modelo del proceso es de vital importancia en el MPC donde uno de los más populares es la respuesta al impulso truncada o modelo de convolución, que posee como ventaja que no requiere del conocimiento del orden del modelo..
(51) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 39. El optimizador también constituye una parte importante del MPC, debido a que suministra las acciones de control requeridas. Cuando la función de costo a minimizar es cuadrática, por un procedimiento generalizado del método de mínimos cuadrados, se puede encontrar una solución analítica lineal para el vector de los movimientos de la señal de control; pero cuando las restricciones en las variables tanto de salida como de entrada son incluidas en el proceso de optimización, la solución analítica no es posible siendo necesario acudir a un procedimiento de optimización numérica basado en algún método de programación lineal o cuadrática. Para el caso de sistemas descritos por modelos no lineales, este proceso de optimización puede presentar problemas de convergencia, requiriéndose una solución específica para cada caso particular (Atherton, D. P. and Irwin, G. W. 2001).. Fig.3.2. 3.2 Elementos del MPC. Todos los algoritmos MPC poseen elementos comunes que permiten elegir diferentes opciones. Dichos elementos son: Modelo de predicción, Función Objetivo y la Ley de Control..
(52) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 40. 3.2.1 Modelo de predicción. El modelo predictor desempeña un papel decisivo en el MPC. Un diseño completo debe incluir los mecanismos necesarios para obtener el mejor modelo posible, el cual debe captar plenamente la dinámica del proceso, permitir las predicciones a calcular y ser intuitivo, permitiendo el análisis teórico. Su uso se determina por la necesidad de calcular la salida predicha en instantes futuros. Se utilizan varios tipos de modelos relacionando salidas con entradas. Se puede considerar también un modelo de disturbio para describir un comportamiento que no es reflejado por el modelo del proceso, como son las entradas no medidas, los ruidos y los errores del modelo.. 3.2.1.1 Modelo del proceso. Prácticamente cualquier forma de modelo puede aparecer en la formulación del MPC. Los más comúnmente usados son:. Respuesta al Impulso:. También conocido como modelo de convolución se utiliza en el MAC y en un caso especial del control predictivo generalizado. GPC (Clarke et. al. 1989). La salida se. relaciona con la entrada por la sumatoria de convolución mostrada en la ecuación (3.1):. y(t) =. ∞. ∑ h u (t − i ) i =1. i. (3.1). Donde; hi es la salida muestreada cuando el proceso es excitado por un impulso unitario como se indica en la Fig. 3.3..
(53) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 41. Fig.3.3. Normalmente se trunca la sumatoria (3.1) y solamente se toman N muestras de la respuesta al impulso. Entonces: N. ( ). y( t ) = ∑ h i u (t − i ) = H z −1 u ( t ). (3.2). i =1. donde; H ( z −1 ) = h1z −1 + h 2 z −2 + Λ + h N z − N. Normalmente N se toma tal que el 90 – 95% de la señal sea considerada; valores típicos en la practica son N = 40 a 50. El predictor basado en la respuesta al impulso está dado por:. N. ( ). ŷ( t + k t ) = ∑ h i u (t + k − i t ) = H z −1 u ( t + k t ). (3.3). i =1. Este método es ampliamente aceptado en la industria por ser muy intuitivo y reflejar claramente la influencia de un fenómeno determinado en una salida específica..
(54) CAPÍTULO 3. TEORÍA DEL CONTROL PREDICTIVO BASADO EN EL MODELO (MPC). 42. Para el caso multivariable las diferentes salidas reflejarán los efectos de las distintas entradas de acuerdo con cada canal. de acción entrada-salida. Matemáticamente se. relacionan por la siguiente expresión: M. N. y j ( t ) = ∑∑ h ikj u k ( t − i). (3.4). k =1 i =1. El método posee las siguientes ventajas: No se necesita información previa sobre el proceso, la identificación de la planta es muy fácil de realizar, admite dinámicas complejas en la misma como la respuesta inversa y el tiempo de retardo y no se requiere del conocimiento de un orden del modelo.. Respuesta al paso:. Se usa en DMC y sus variantes, es muy similar al anterior; pero ahora la señal de excitación es un paso unitario. La respuesta al paso típica de un proceso es como se nuestra en la Fig. 3.4. Para sistemas estables la respuesta truncada es: N. y( t ) = y 0 + ∑ g1∆u ( t − i) = y 0 + G ( z −1 )(1 − z −1 ) u ( t ) i =1. Fig.3.4. (3.5).
Figure
+7
Outline
Documento similar