Propuesta de solución de comunicación subacuática entre el submarino HRC AUV y una estación remota
81
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electrónica y Telecomunicaciones. TRABAJO DE DIPLOMA Propuesta de solución de comunicación subacuática entre el submarino HRC-AUV y una estación remota Autor: Marian González Aguila E-mail: [email protected]. Tutor: Dr.C. Erik Ortiz Guerra Departamento de Electrónica y Telecomunicaciones E-mail: [email protected]. Msc. Yunier Valeriano Medina Departamento. de. Automática. Computacionales E-mail: [email protected] Santa Clara 2016 “Año 58 de la Revolución”. y. Sistemas.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. La utopía está en el horizonte. Camino dos pasos, ella se aleja dos pasos y el horizonte se corre diez pasos más allá. ¿Entonces para qué sirve la utopía? Para eso, sirve para avanzar. Eduardo Galeano..
(5) ii. DEDICATORIA. A mi mamá, por ser el impulso que me ha llevado hasta donde estoy, A mi papá, aunque hoy no pueda estar aquí, Y A Dios.
(6) iii. AGRADECIMIENTOS. A mi mamá y a mi familia, por todo su apoyo durante este tiempo. Quiero agradecer muy especialmente a mi tutor Erik Ortiz Guerra, sin el cual la realización de este trabajo no hubiese sido posible. Gracias Erik por el ánimo, la dedicación y por haberme dado la fuerza para continuar tantas veces. A mi tutor Yunier Valeriano Medina, por ser más que un tutor, por ser un amigo. A mis amigos de todas partes, pero en especial a los que hice en esta universidad. A Artiom, Lisandra, Maidelis, Merlin, Odel, Reidel (“el Chino”), Yanet, Anailys, Valeriano, Dizahab, Alejandro, José Daniel, Héctor (“el Piti”), Samy, Urquijo, y otros muchos, cuyos nombres no están presentes aquí, pero si en mi corazón..
(7) iv. TAREA TÉCNICA. Con la intención de cumplir con los objetivos trazados en esta tesis, se tuvo en cuenta las siguientes tareas técnicas para la confección del informe: 1. Identificación de las limitaciones de comunicación que tiene el submarino HRC-AUV. 2. Descripción de las particularidades del canal de comunicación subacuático. 3. Caracterización de las tecnologías existentes en la actualidad para las comunicaciones acústicas subacuáticas. 4. Obtención mediante simulación de los parámetros del entorno de propagación acústico en distintos escenarios. 5. Propuesta del hardware apropiado para la implementación del sistema de comunicación subacuático para el submarino HRC-AUV.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. Los vehículos autónomos subacuáticos constituyen una herramienta competente para la realización de variadas tareas como la exploración del océano, la protección de costas y la navegación marítima. La presente investigación tiene como objetivo proponer una solución de comunicación que le permita al vehículo HRC-AUV comunicarse con la estación remota de control mientras el primero se encuentra sumergido. Para ello se exponen las principales necesidades de comunicación que tiene el HRC-AUV y se describen las particularidades que presentan las comunicaciones en estos entornos. Como resultado se propone un dispositivo que garantice el enlace de datos entre el vehículo y la estación de control teniendo en cuenta los requerimientos de comunicación del submarino. Los parámetros a tener en cuenta para la selección de los dispositivos se obtienen de las hojas de datos del fabricante y de la caracterización del entorno marino mediante simulación..
(9) vi TABLA DE CONTENIDOS. PENSAMIENTO................................................................................................................................. i DEDICATORIA ................................................................................................................................. ii AGRADECIMIENTOS..................................................................................................................... iii TAREA TÉCNICA ............................................................................................................................ iv RESUMEN ......................................................................................................................................... v INTRODUCCIÓN.............................................................................................................................. 1 CAPÍTULO 1.. PARTICULARIDADES. SUBACUÁTICAS. 5. DE. LAS. COMUNICACIONES. 1.1. Introducción ....................................................................................................................... 5. 1.2. Desarrollo de los AUVs ................................................................................................... 5. 1.3. Descripción del HRC-AUV .............................................................................................. 7. 1.3.1. Arquitectura de hardware del HRC-AUV .............................................................. 8. 1.3.2. Sistema de comunicación ....................................................................................... 9. 1.4. Comparativa de las tecnologías inalámbricas utilizadas en el ámbito subacuático 11. 1.4.1. Ondas de radiofrecuencia ..................................................................................... 12. 1.4.2. Señales ópticas....................................................................................................... 13. 1.4.3. Señales acústicas................................................................................................... 16. 1.5. Consideraciones finales ................................................................................................ 21. CAPÍTULO 2.. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA............... 22. 2.1. Introducción ..................................................................................................................... 22. 2.2. Arquitecturas de comunicación convenientes para el HRC-AUV ........................... 22. 2.3. Modelos de propagación acústica subacuática ......................................................... 24. 2.3.1. La Ecuación de la onda ......................................................................................... 25.
(10) vii 2.3.2. Scooter & Fields ..................................................................................................... 26. 2.3.3. KRAKEN y KRAKENC ........................................................................................... 27. 2.3.4. Bounce & Bellhop ................................................................................................... 28. 2.3.5. RAM .......................................................................................................................... 30. 2.4. AcTUP v2.2L ................................................................................................................... 31. 2.4.1 2.5. Interfaz de ususario................................................................................................ 33. Consideraciones finales ................................................................................................ 37. CAPÍTULO 3.. ANÁLISIS Y DISCUSIÓN DE LOS RESULTADOS .................................. 38. 3.1. Introducción ..................................................................................................................... 38. 3.2. Módems Acústicos ......................................................................................................... 38. 3.2.1. Módems Acústicos Comerciales .......................................................................... 39. 3.2.2. Módems Acústicos Experimentales..................................................................... 41. 3.3. Selección de la tecnología ............................................................................................ 42. 3.4. Simulaciones..................................................................................................................... 44. 3.3.1. Propagación en aguas poco profundas .............................................................. 45. 3.3.2. Propagación en el canal acústico superficial ..................................................... 49. 3.5. Consideraciones finales .................................................................................................. 55. CONCLUSIONES ........................................................................................................................... 56 RECOMENDACIONES ................................................................................................................. 58 REFERENCIAS BIBLIOGRÁFICAS ............................................................................................ 59 ANEXO 1: CARACTERÍSTICAS DE DIFERENTES MÓDEMS ACÚSTICOS ..................... 66 ANEXO 2: RESULTADOS DE LAS SIMULACIONES EN UN CANAL DE AGUAS POCO PROFUNDAS.................................................................................................................................. 68 ANEXO 3: RESULTADO DE LAS SIMULACIONES EN EL CANAL SUPERFICIAL .......... 70.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. Cuba es un país rodeado de mar, lo que lo obliga a potenciar el desarrollo de importantes actividades económicas como la exploración petrolera, el comercio marítimo-portuario y la pesca. Para todo esto resulta necesario contar con una infraestructura marina de alta complejidad, en la que es necesario que se realicen labores sistemáticas de mantenimiento, inspección y vigilancia (Valeriano Medina, 2013). En este escenario la utilización de vehículos autónomos subacuáticos o Autonomous Underwater Vehicle (AUV, por sus siglas en inglés) cobra cada vez más importancia debido a las ventajas que reportan desde el punto de vista económico y medioambiental (Antonelli et al., 2008). Un AUV se puede definir como un submarino que porta consigo una fuente de energía y unidad de cómputo, donde se ejecutan soluciones de software y control, que le permite cumplir tareas predefinidas sin la intervención humana (Fjellstad, 1994, Blidberg, 2001a, Antonelli et al., 2008). Son vehículos relativamente pequeños, auto-propulsados y no tripulados que pueden operar totalmente bajo el agua lejos del alcance del algún centro de comunicación y control (Fernandes et al., 2003). Usualmente se pre-programan para ejecutar variadas misiones subacuáticas y pueden ser lanzados y recuperados en zonas bajas de la costa o en mar abierto. Típicamente tienen forma cilíndrica de 2 a 10 m de longitud y de 0.2 a 1.3 m de diámetro. La mayor parte del espacio interno del AUV es ocupado con las fuentes de energía y propulsión, así como con la instrumentación necesaria para el control. Estos vehículos en su gran mayoría operan hasta los 200 m de profundidad, llegando incluso algunos hasta los 5000 m (Valeriano Medina, 2013)..
(12) INTRODUCCIÓN. 2. Los AUV se pueden utilizar en un gran número de aplicaciones, tales como: el estudio de la diversidad microbial marina y de los ecosistemas, la exploración, explotación y conservación del océano y sus recursos, el monitoreo, mantenimiento y protección de las comunicaciones, el transporte de energía que discurren bajo las aguas, la arqueología marina, la navegación marítima y portuaria, la protección de costas, infraestructuras y ecosistemas marinos, entre otras (Hernández Julián, 2014). Varias universidades del mundo se han propuesto desarrollar diferentes prototipos de AUV con fines investigativos, un ejemplo de ello son: la Universidad de Oporto en Portugal (Ramos and Neves, 2008), la Universidad del Sur en Argentina (Jordán and Bustamante, 2008), la Universidad de Newcastle en Australia (Antonelli et al., 2008), la Universidad Noruega de Ciencia y Tecnología (Fossen, 1994, Fossen, 2002, Fossen et al., 2009, Lekkas, 2014), entre otras. En nuestro país, en el 2009, el Centro de Investigaciones y Desarrollo Naval (CIDNAV) y el Grupo de Automatización, Robótica y Percepción (GARP), adscrito al Departamento de Automática y Sistemas Computacionales de la UCLV comenzaron a trabajar en un proyecto con fines científicos que tiene como finalidad dotar a un vehículo subacuático de capacidades tecnológicas, que le permita cumplir misiones de manera autónoma (Valeriano Medina, 2013). De esta manera surge el proyecto HRC-AUV. El diseño mecánico y la construcción naval del HRC-AUV corrieron a cargo del CIDNAV, mientras que el diseño de la arquitectura de hardware y la selección de los sensores a bordo fue realizado por el GARP. La arquitectura de hardware cuenta con dos segmentos: el de a bordo, en el submarino y el remoto, ubicado en tierra firme o a bordo del buque acompañante. El segmento a bordo está compuesto por dos unidades de cómputo y una de potencia (Valeriano Medina, 2013, Martinez et al., 2013). El segmento remoto está compuesto por un ordenador portátil de la firma Panasonic Toughbook 31 donde se ejecuta el sistema de supervisión y configuración del AUV. Para las comunicaciones inalámbricas entre el vehículo y la estación remota, el ordenador se conecta a un modem de frecuencia 900MHz (902.
(13) INTRODUCCIÓN. 3. a 928 MHz en la práctica), cuya razón de transmisión es de 9600 baudios empleando técnica de espectro extendido por salto de frecuencia (FHSS) y modulación FSK. El modem tiene una antena half-duplex de 50 Ω de impedancia que le permite alcanzar distancias de 14 hasta 40 millas. La potencia de transmisión es de 1 mW a 1 W y la sensibilidad del modem como receptor es de -110 dBm. El dispositivo puede trabajar bajo temperaturas que oscilan entre los -40 a 85 °C. Estas características permiten el intercambio de datos durante las misiones, siempre que el vehículo esté navegando en superficie o a altura de periscopio. El proyecto HRC-AUV es un prototipo inacabado. El vehículo cuenta con numerosos retos en cuanto a comunicación se refiere, ya que cuando el submarino se encuentra sumergido no existe comunicación entre el mismo y la estación remota, puesto que para la transmisión de datos se utilizan señales electromagnéticas, las cuales están más propensas a las pérdidas de información producto de la absorción que se produce en el medio subacuático. Por tal razón, esta investigación pretende proponer una solución de comunicación subacuática que le permita al submarino HRC-AUV comunicarse con la estación de control cuando este se encuentre bajo el agua, debido a que el sistema actual no satisface las necesidades del mismo y no contribuye al desempeño óptimo durante la realización de sus misiones. Teniendo en cuenta lo anterior se puede plantear como problema científico de esta investigación: ¿Cómo establecer comunicación entre la estación remota de control y el submarino HRC-AUV mientras este se encuentra sumergido? Para dar respuesta al problema científico se plantea como objetivo general proponer una solución de comunicación subacuática entre el submarino HRC-AUV y una estación remota. Para ello se trazaron los siguientes objetivos específicos: 1. Identificar las limitaciones de comunicación del submarino HRC-AUV. 2. Describir las particularidades del canal de comunicaciones subacuático. 3. Caracterizar las tecnologías existentes en la actualidad para las comunicaciones acústicas subacuáticas..
(14) INTRODUCCIÓN. 4. 4. Obtener mediante simulación los parámetros del entorno de propagación acústico en distintos escenarios. 5. Proponer el hardware apropiado para la implementación del sistema de comunicación subacuático para el submarino HRC-AUV. De los cuales se derivaron las siguientes interrogantes científicas: . ¿Qué limitaciones de comunicación tiene el submarino HRC-AUV?. . ¿Cuáles son las particularidades del canal de comunicaciones subacuático?. . ¿Qué características presentan las tecnologías existentes en la actualidad para las comunicaciones acústicas subacuáticas?. . ¿Cómo obtener mediante simulación los parámetros del sistema de comunicación acústico en distintos escenarios?. . ¿Qué hardware de comunicación es el apropiado para el submarino HRCAUV?. La memoria escrita está estructurada en introducción, tres capítulos, conclusiones, recomendaciones, bibliografía y anexos. En la introducción se aborda la actualidad y necesidad del tema a investigar y se presenta el problema científico a resolver en la investigación, así como los objetivos que se persiguen con esta. En el capítulo I se identifican las principales limitantes en la comunicación que presenta el submarino HRC-AUV y se describen las particularidades que tienen las comunicaciones inalámbricas en entornos subacuáticos. En el segundo capítulo se proponen nuevas arquitecturas de comunicación que cumplan con las necesidades que presenta el vehículo subacuático; además se exponen los principales modelos de propagación acústica que a tener en cuenta en la realización de las simulaciones y se realiza una descripción del software a utilizar. En el tercer capítulo se muestran los resultados de las simulaciones y se realiza la discusión de los mismos. En las conclusiones se destaca el cumplimiento de los objetivos planteados en la realización de la investigación. Las recomendaciones, por su parte, están dirigidas a enriquecer futuras investigaciones relacionadas con este tema..
(15) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 5. CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS. 1.1 Introducción Las comunicaciones bajo el agua han sido usadas desde el inicio del siglo XX para permitir un enlace de datos entre la superficie y el medio acuático (Woodward and Sari, 1996), pero no ha sido hasta las últimas décadas que estas han captado la atención de investigadores y desarrolladores. En la actualidad son de interés significativo. para. diferentes. esferas. tanto. científicas. como. comerciales,. medioambientales, de seguridad nacional y para fines militares (Manjula and Manvi, 2011). El presente capítulo se encuentra desarrollado en epígrafes y en el mismo se hace un análisis de la literatura principal relacionada con el objeto de estudio. En primer lugar se expone lo relacionado con los diferentes prototipos de vehículos subacuáticos que existen en la actualidad y se realiza una descripción detallada del vehículo HRC-AUV, de carácter nacional, mostrando su arquitectura de hardware, los principales sensores que lo integran, así como la solución de comunicación que emplea el mismo y las principales deficiencias con que cuenta. Finalmente se realiza un análisis comparativo de las diferentes tecnologías que se emplean en el desarrollo de las comunicaciones inalámbricas subacuáticas. 1.2 Desarrollo de los AUVs La familia de los vehículos subacuáticos está dividida en diferentes grupos. Ente ellos se encuentran los que se trasladan remolcados por la parte trasera de un barco, que constituyen el tipo más sencillo. Están los conocidos como vehículos.
(16) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 6. operados remotamente o Remotly Operated Vehicle (ROV), los cuales son controlados directamente por un operador remoto a través de un cable de comunicación. Otro grupo son los vehículos subacuáticos no tripulados sin conexión por cable o Unmanned Underwater Vehicle (UUV), estos últimos portan una fuente de energía pero son controlados por un operador mediante algún tipo de comunicación remota (Valeriano Medina, 2013). En la actualidad, la literatura reporta varios tipos de AUV que han sido diseñados con fines comerciales, militares y científicos, entre ellos se encuentran: . SeaWolf (Figura 1.1 (a)) es un prototipo de AUV construido por ATLAS MARIDAN. Se trata de un vehículo de 2 m de largo con una estructura similar a un torpedo y que puede alcanzar profundidades de hasta 300 m. La combinación entre maniobrabilidad y potencia que presenta SeaWolf le permite ejecutar una gran variedad de tareas de inspección, vigilancia y reconocimiento, sobre todo en ambientes con estructuras altamente complejas (WERKS, 2016).. . SAUV II (Figura 1.1 (b)) desarrollado por Autonomous Undersea Systems Institute y Falmouth Scientific Inc, es un vehículo autónomo alimentado por energía solar que es capaz de operar en la superficie del agua o a profundidades de hasta 500 m. El vehículo se encuentra equipado con baterías recargables de ion litio, que le permiten el cumplimiento de sus misiones en ambientes donde la energía solar es mínima. El control bidireccional del vehículo y la adquisición de datos en tiempo real son llevadas a cabo a través de: una comunicación integrada utilizando señales de radiofrecuencia, un enlace satélital opcional o utilizando módems acústicos. Entre las principales aplicaciones que tiene este vehículo se encuentran: monitoreo medioambiental, investigaciones científicas e inspección del suelo marino (Alam et al., 2011, Rzhanov et al., 2014).. . Subsea Glider (Figura 1.1 (c)) es un vehículo desarrollado por Evo Logic. Se utiliza. principalmente. para. aplicaciones. tales. como:. monitoreo. medioambiental, mapeo de costas y labores de inspección, mantenimiento y reparación. Subsea Glider puede alcanzar profundidades de hasta 100 m a.
(17) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 7. una velocidad promedio de 1.39 m/s. Su figura simula el cuerpo de una raya, lo que le permite integrarse en el medio subacuático con mayor efectividad (Ellery, 2016).. (a) SeaWolf. (b) SAUV II. (c) Subsea Glider Figura 1.1. Proyectos de AUV. En Cuba, el proyecto HRC−AUV constituye el primer intento que realiza el país en pos de lograr el desarrollo de vehículos marinos autónomos (Garcia-Garcia et al., 2012, Valeriano-Medina et al., 2013, Hernández Julián, 2014, Medina et al., 2015). 1.3 Descripción del HRC-AUV Como resultado de la labor realizada por el CIDNAV en el diseño mecánico y la construcción naval del HRC-AUV, se cuenta con un vehículo con alto grado de simetría y forma cilíndrica, cuya estructura es similar al Hugin 4500 (Hegrenses et al., 2007) y al STARFISH (Sangekar et al., 2008). El sistema de actuadores está compuesto por un propulsor y dos timones de control, uno para el rumbo y otro para la profundidad, ubicados todos en la parte trasera del vehículo y accionados eléctricamente (Martínez et al., 2010). El HRC − AUV puede operar de forma segura hasta profundidades de 10 m, con tres modos de operación fundamentales: teledirección para las misiones en superficie, autopiloto con los lazos de control.
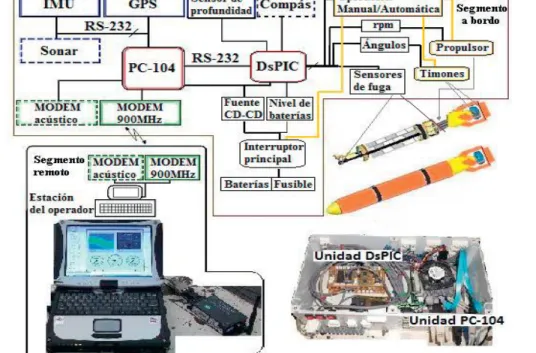
(18) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 8. activados para seguir los valores deseados de rumbo y profundidad, y un tercer modo para el seguimiento de trayectorias. 1.3.1 Arquitectura de hardware del HRC-AUV Como fue mencionado anteriormente, el diseño de la arquitectura de hardware y la selección de los sensores a bordo del HRC-AUV fue realizado por GARP. En la Figura 1.2 se muestran esquemáticamente los distintos elementos de hardware que componen el sistema. Es válido señalar que la versión que se presenta es una actualización de la presentada en (Martínez et al., 2010), con el propósito de reducir el volumen del equipamiento y ganar en fiabilidad, cobertura de comunicaciones y potencia de cálculo para realizar las tareas de navegación. Además, los elementos enmarcados en línea discontinua (sonar, brújula adicional y modem acústico) no se encuentran operativos, pero pueden ser agregados en cualquier momento sin tener que realizar grandes modificaciones. La estructura cuenta con dos segmentos bien definidos: el de a bordo en el submarino y el remoto, ubicado en tierra firme o a bordo del buque acompañante (Martinez et al., 2013).. Figura 1.2. Arquitectura de hardware del HRC-AUV (Martinez et al., 2013) El segmento a bordo lo componen dos unidades de cómputo y una de potencia. Las unidades de cómputo son: una computadora industrial PC-104 modelo “PCM-3362”.
(19) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 9. de la firma Advantech® y un sistema empotrado diseñado por GARP basado en dos DsPIC 33FJ64 de la firma Microchip®, mientras que la unidad de potencia la constituye un bloque CD-CD que brinda todos los voltajes requeridos por la arquitectura de hardware del AUV. Estas dos unidades se dividen el trabajo de adquisición de datos desde los sensores y las tareas de navegación y control (Martínez et al., 2010). Esta arquitectura dual, con separación de funciones para el sistema de cómputo a bordo, ha sido una solución implementada por otros investigadores en la misma situación (Sangekar et al., 2008, Calvo et al., 2014). El segmento remoto está compuesto por un ordenador portátil de la firma Panasonic Toughbook 31, donde se ejecuta el sistema de supervisión y configuración del AUV. El mismo tiene como requerimientos mínimos un procesador Pentium IV y 256 MB de RAM (Martinez et al., 2013). El equipo utiliza como dispositivo de comunicaciones. inalámbricas. un. modem. cuyas. características,. descritas. anteriormente, son las apropiadas para el intercambio de datos durante las misiones (siempre que el vehículo esté navegando en superficie o a altura de periscopio). En la literatura se han propuesto varias versiones de la arquitectura de hardware presente en un AUV (Sangekar et al., 2008, Brown et al., 2009, Calvo et al., 2014), optimizadas acorde al contexto de la aplicación que desarrollan los mismos y el presupuesto disponible. No obstante, se puede plantear que existe un acuerdo general en cuanto a qué sensores deben acompañar a los medios de cómputo instalados en un AUV. De acuerdo a la clasificación propuesta en (Batlle et al., 2005) los sensores instalados a bordo del HRC-AUV son: sistema de posicionamiento global (Global Position Systems, GPS), sensores de medida inercial, de profundidad, de fuga, de presión y nivel de baterías; además de otros capaces de medir las condiciones generales de operación. 1.3.2 Sistema de comunicación La comunicación entre el submarino y la estación remota se realiza siguiendo el esquema representado en la Figura 1.3:.
(20) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 10. Figura 1.3. Estructura de comunicación entre el vehículo HRC-AUV y la estación remota a bordo del buque acompañante. El software de comunicación que se emplea para el intercambio de información entre las unidades de cómputo en el segmento a bordo y la unidad remota se apoya en el protocolo RS-232. La transmisión de los datos se realiza acorde a un sistema de tramas de longitud máxima 255 bytes con la estructura que se muestra en la Figura 1.4:. Figura 1.4. Estructura de las tramas de comunicación (Martinez et al., 2013). En general, las tramas de datos se clasifican en tramas de solicitud de datos y tramas de configuración. Las primeras son enviadas desde la estación remota a la estación a bordo con vistas a solicitar el paquete de datos a supervisar, mientras que las segundas contienen los datos de configuración que se transmiten entre la estación remota y la PC-104. Las tramas de configuración poseen confirmación de recepción, lo que permite que una vez enviado un dato entre estaciones el mismo se continúe enviando hasta recibir una confirmación de arribo correcto. Esto es significativo para la fiabilidad del sistema, dado que el ruido y la mala propagación de las señales radioeléctricas cerca de la superficie del mar podrían causar efectos indeseables (Martinez et al., 2013). El software ejecutado en la estación remota es utilizado como herramienta de supervisión y configuración a distancia del HRC-AUV. Esta aplicación incorpora interfaces gráficas diseñadas apropiadamente para facilitar la interacción remota.
(21) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 11. con el vehículo. Entre los servicios que ofrece este software destacan: servicio de supervisión, que permite monitorear la navegación en superficie del vehículo, servicio de tele-operación, servicio de planificación de trayectorias, servicio para el ajuste de controladores, entre otros (Valeriano Medina, 2013). Todos estos servicios se actualizan mediante el enlace inalámbrico, lo cual solo es posible cuando el AUV se encuentra en la superficie. Como se ha podido apreciar, el vehículo subacuático HRC-AUV presenta numerosas deficiencias para establecer comunicación entre el mismo y la estación remota de control cuando el primero se encuentra sumergido, ya que no cuenta con la presencia de transmisores y receptores que permitan la comunicación bajo el agua. Las señales electromagnéticas son las empleadas por el sistema en la transmisión de datos. Este tipo de señales son ideales para las comunicaciones inalámbricas terrestres, pero cuando las ondas de radiofrecuencia atraviesan el agua se degradan grandemente ya que pasan de un medio a otro con índice de refracción distinto. Más adelante en este capítulo se realiza una comparación entre los diferentes tipos de tecnologías inalámbricas que se utilizan en estos entornos llegando a la conclusión de cuál es la más idónea. Numerosos son los retos que presentan las comunicaciones inalámbricas subacuáticas. Factores como la distorsión y la absorción constituyen las principales causas que limitan el alcance de las mismas, y en particular: el ancho de banda limitado, la alta y variable demora de propagación y las limitantes en cuanto al consumo de energía (Ortiz Guerra, 2011). 1.4 Comparativa de las tecnologías inalámbricas utilizadas en el ámbito subacuático El medio subacuático se encuentra sumamente afectado por la absorción y las pérdidas de propagación de las ondas que en el mismo se transmiten, lo que limita grandemente la comunicación. En estos entornos se utilizan básicamente para la transmisión tres tecnologías, estas son: señales acústicas, electromagnéticas y ópticas. En esta sección se describen las principales características de cada una..
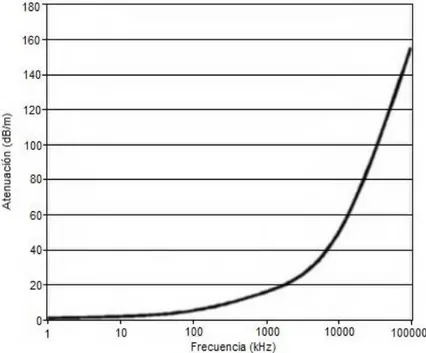
(22) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 12. 1.4.1 Ondas de radiofrecuencia Las ondas de radiofrecuencia se pueden definir como las ondas electromagnéticas cuya frecuencia es menor a los 300 GHz. La principal dificultad que encuentra este tipo de tecnología en su aplicación en el ámbito subacuático es la conductividad del agua salada. A pesar de que el agua pura es un aislante, el agua que se encuentra en la naturaleza contiene partículas en suspensión y sales minerales disueltas, que la convierten en un conductor de la corriente eléctrica (Sánchez Matias, 2013). Por lo tanto se puede afirmar que, cuanto mayor es la conductividad de un material, mayor es la atenuación de las señales de radiofrecuencia que lo atraviesan (Moore, 1967). La conductividad del agua de mar disminuye también la longitud de onda de estas señales, lo que produce que se vuelvan inútiles para la transmisión a largas distancias (Verma and Prachi, 2015). En medios donde la conductividad eléctrica es alta, la velocidad de propagación y las pérdidas por absorción de las ondas electromagnéticas son directamente proporcionales a la frecuencia de la portadora (Sendra Compte, 2012). La Figura 1.5 muestra el valor de las pérdidas por atenuación en dependencia de la frecuencia.. Figura 1.5. Atenuación de las señales electromagnéticas en el agua salada (Ortiz Guerra, 2011)..
(23) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 13. Como se muestra en la figura, las ondas electromagnéticas a altas frecuencias pierden energía, lo que las hace ineficientes para usos subacuáticos. Las pérdidas de absorción tienen un efecto adverso en la señal y traen como resultados altas pérdidas en la intensidad de la señal, afectaciones del rango de transmisión y en la calidad de la señal recibida (Verma and Prachi, 2015). Otra de las principales limitaciones que presentan estas señales es que sólo las ondas entre 30 y 300 Hz son candidatas para aplicaciones subacuáticas. Este rango de frecuencia obliga a que el tamaño de las antenas necesarias sea desmesurado para obtener una eficiencia de radiación óptima (Sánchez Matias, 2013, Melodia et al., 2013). Las bajas frecuencias limitan además el ancho de banda y la distancia de propagación es extremadamente pequeña. Un ancho de banda limitado restringe la tasa de transmisión y soporta una capacidad de tráfico muy pequeña (Verma and Prachi, 2015). Las ondas de radiofrecuencia tienen el inconveniente de que las mayores velocidades de transmisión se logran para distancias muy cortas, de apenas unas decenas de metros.. Estudios realizados recientemente en módems utilizando. radiofrecuencia han demostrado que señales de entre 1 y 20 MHz han podido cubrir enlaces de 100 metros a velocidades superiores a 1 Mbps, utilizando dipolos (sin contacto con el agua para mejorar la eficiencia de radiación) con potencias de transmisión de aproximadamente 100 W (Lucas et al., 2004, Al-Shamma'a et al., 2004). Por otro lado la compañía Wireless Fibre Systems en colaboración con otras empresas líderes del sector como Tritech (Tritech, 2016) y Konsberg, han diseñado diferentes módems subacuáticos, entre ellos el conocido como SeaTooth, que emplea señales de radiofrecuencia para la transmisión bajo el agua y puede cubrir enlaces de un metro con velocidades de 156 kbps. Prestaciones de interés para estos entornos de diferentes módems diseñados por la compañía WFS Subsea se pueden encontrar enunciados en (Sánchez Matias, 2013). 1.4.2 Señales ópticas Las comunicaciones ópticas están basadas en la transmisión de señales con longitudes de onda entre 400 nm (luz azul) y 700 nm (luz roja) (Sánchez Matias,.
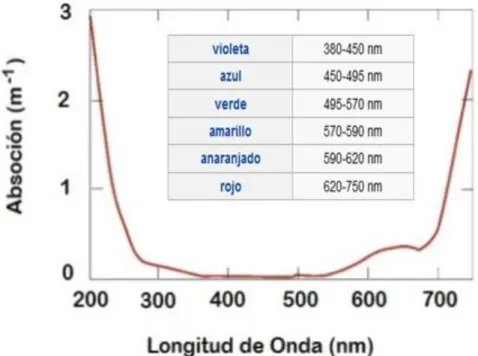
(24) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 14. 2013). Similar a las ondas de radiofrecuencia, las altas frecuencias en las señales ópticas permiten alta tasa de transmisión y bajo consumo de potencia, pero sufren el inconveniente de propagarse solo a pequeñas distancias. Estas solo pueden viajar de unos pocos metros a decenas de metros utilizando alta potencia de transmisión (Verma and Prachi, 2015). El agua de mar tiene un factor de absorción muy alto en la banda de frecuencias ópticas, aunque no todas las frecuencias dentro del espectro se ven afectadas de la misma manera. Cada color es una radiación de frecuencia particular, por esta razón, los colores rojos son los primeros en desaparecer, mientras que los últimos son los colores azul y verde (Sendra Compte, 2012). La Figura 1.6 muestra la absorción que reciben las señales ópticas en el agua de mar.. Figura 1.6. Coeficiente de absorción del agua del mar. Las longitudes de onda de colores azul-verde, ofrecen un buen rendimiento para comunicaciones de banda ancha (de 10 Mbps a 150 Mbps) a distancias moderadas entre 10 y 100 metros. En teoría, mediante el uso de señales ópticas para la comunicación bajo el agua se puede alcanzar velocidades de hasta 1 Gbps; sin embargo, las señales ópticas tienen grandes desventajas..
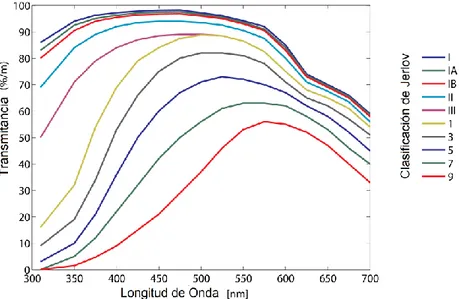
(25) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 15. Cuando la luz se propaga en un medio acuoso, su intensidad disminuye exponencialmente, debido principalmente a la atenuación que se produce por la absorción y la dispersión que sufren las señales luminosas en el medio acuático. La absorción se produce por diferentes motivos tales como: algas que utilizan la luz como fuente de energía, partículas y materias orgánicas e inorgánicas en suspensión, compuestos inorgánicos disueltos o las propiedades físicas de la propia agua. La dispersión, por su parte, es el resultado de la colisión del haz de luz, con las partículas en suspensión, produciendo múltiples reflexiones. A mayor grado de turbidez en el agua, mayor efecto de dispersión se genera, lo que dificulta la penetración de la luz (Sendra Compte, 2012). En 1968, N. G. Jerlov publicó un sistema de clasificación de la claridad del agua (Jerlov, 1968) que se muestra en la Figura 1.7. Esta escala clasifica las aguas en oceánicas o profundas (grupos I a III) y en someras o costeras (grupos 1 a 9), en orden decreciente de transmitancia. De esta gráfica, en (Sánchez Matias, 2013) se concluye que en aguas costeras, con mayor turbidez, la atenuación debido a este concepto es máxima y, por tanto, la comunicación será muy poco eficiente en términos de potencia.. Figura 1.7. Transmitancia del agua salada en función de la escala de claridad del agua de N. G. Jerlov (Jerlov, 1968).
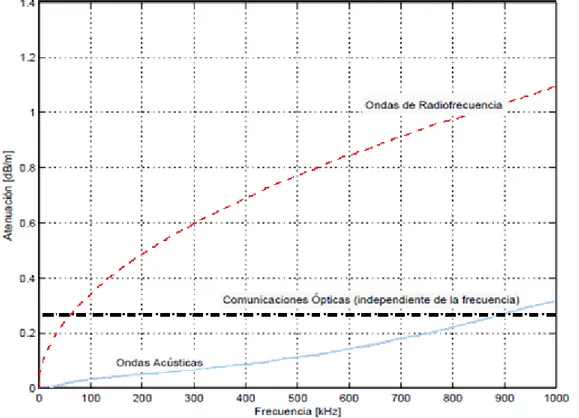
(26) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 16. En un experimento llevado a cabo por la Universidad Estatal de Carolina del Norte en 2005, se observó que únicamente el 10% de la señal transmitida fue recibida en un enlace de 15 m en las aguas del mar Báltico (categoría 3 en la escala de Jerlov) (Chancey, 2005). Los mejores resultados de investigaciones relacionados con esta tecnología son de enlaces de 100 metros en un tanque de agua y 10 metros en mar abierto con aguas poco turbias con tasas de 10Mbps (Fair et al., 2006). Las señales ópticas además, demandan línea de vista y clara visibilidad para lograr la comunicación entre el emisor y el receptor, de esta manera se reduce el efecto de la dispersión e incrementa el rango de transmisión (Verma and Prachi, 2015). 1.4.3 Señales acústicas Las comunicaciones acústicas constituyen la tecnología más versátil y usada en las comunicaciones bajo el agua (Ortiz Guerra, 2011, Melodia et al., 2013), ya que la banda de frecuencia que emplean es muy baja (de 20Hz a 20kHz). Esto se debe a la baja atenuación que sufren las ondas acústicas con respecto a las variantes expuestas anteriormente, en ambientes estables térmicamente y a profundidades considerables (Lanbo et al., 2008). Las señales acústicas constituyen una tecnología altamente influenciada por pérdidas de propagación, ruido, multitrayecto, efecto Doppler y retardo variable. Todos estos factores determinan una variación temporal y espacial del canal acústico (Melodia et al., 2013). En esta sección se analizan estos factores, describiendo cómo influyen en la comunicación acústica subacuática. . Pérdidas de propagación:. Las pérdidas de propagación de la onda acústica en el medio subacuático se deben principalmente a dos fenómenos: la absorción y la dispersión geométrica. a) Absorción Como se ha planteado a lo largo de este capítulo, la absorción, tanto para las ondas de radiofrecuencia como para las ópticas, ha sido un factor determinante en la selección de las ondas acústicas como la tecnología predominante en el ámbito de las comunicaciones inalámbricas subacuáticas. La absorción es provocada principalmente por la conversión de la energía en calor, lo que se incrementa con la distancia y la frecuencia (Akyildiz et al., 2004). Esta es.
(27) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 17. también causada por la dispersión y la reverberación (en la profundidad) y por la refracción y la dispersión (en las zonas de la superficie) (Sendra Compte, 2012). Cuando el mar está agitado la energía de las olas es absorbida por el medio, debido a sus características intrínsecas. Las señales acústicas que se propagan a través del agua de mar, sufren el mismo efecto, reduciendo su energía inicial. El fenómeno de absorción es más pronunciado en un rango de frecuencias que en otro. Así, por ejemplo, las frecuencias altas (por encima de 100 KHz) son más sensibles a este fenómeno, por lo que se puede asegurar que la absorción es dependiente de la frecuencia (Sendra Compte, 2012). Esta dependencia limita severamente el ancho de banda disponible: por ejemplo a distancias en el orden de los 100 km el ancho de banda disponible es de solo 1 kHz. A distancias más cortas el ancho de banda es mayor, pero en la práctica este se encuentra limitado según el transductor que se utilice (Stojanovic, 2006). La profundidad del agua determina también un papel clave en la determinación de la atenuación (Akyildiz et al., 2004).. Figura 1.8. Comparativa de la atenuación en función de la frecuencia (excepto para las comunicaciones ópticas) que reciben las diferentes tecnologías utilizadas en las comunicaciones inalámbricas subacuáticas (Sánchez Matias, 2013)..
(28) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 18. b) Expansión geométrica La expansión geométrica se refiere al esparcimiento de la energía del sonido como resultado de la expansión del frente de ondas, es decir, cuando un pulso de una onda acústica se propaga, como el frente de onda se aleja del origen, cubre un área mayor, por tanto, la energía de las olas por unidad de superficie se hace más pequeño. La expansión geométrica aumenta con la distancia de propagación y es independiente de la frecuencia (Akyildiz et al., 2004). Existen dos tipos fundamentales de expansión geométrica: esférica y cilíndrica (Sendra Compte, 2012). En la expansión esférica la fuente se extiende de modo omnidireccional y es característico en comunicaciones que se realizan en aguas profundas. Las pérdidas de energía, causado por la expansión geométrica, son proporcionales al cuadrado de la distancia. Mientras que la cilíndrica tiene en cuenta la radiación horizontal y sólo se presenta en las comunicaciones en aguas poco profundas. Las pérdidas de energía en este efecto, son proporcionales a la distancia. . Ruido. El ruido acústico de comunicación se define como cualquier sonido no deseado que interfiere con la comunicación entre los sistemas de comunicación. En el ambiente subacuático se pueden distinguir básicamente dos tipos de ruido (Akyildiz et al., 2004, Sendra Compte, 2012): a) Ruido generado Es el ruido causado principalmente por maquinarias tales como: motores, bombas, engranajes, centrales eléctricas, entre otros. Además, en esta clasificación se incluye el ruido producido por la actividad natural del medio. b) Ruido ambiental Este ruido se relaciona con los movimientos del agua: las mareas, corrientes, tormentas, burbujas de agua cuando las olas chocan con la costa, entre otras, que pueden generar pérdidas de hasta 26 dB/m. También los fenómenos sísmicos y biológicos pueden considerarse dentro de este grupo. Todos estos fenómenos se conocen como hidrodinámica (Preisig, 2007)..
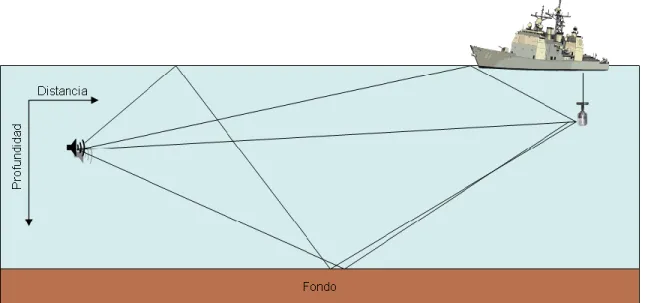
(29) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 19. Investigaciones realizadas anteriormente plantean que a muy bajas frecuencias, las fuentes de ruido predominantes son las turbulencias y el ruido producido por los barcos, mientras que hasta frecuencias de alrededor de 100 kHz, el ruido producido por el viento es el que tiene una importancia considerable. Cuando se trabaja a alta frecuencia, el ruido que predomina es el térmico (Sánchez Matias, 2013). . Multitrayecto. La propagación multitrayecto, representada en la Figura 1.9, es responsable de la degradación severa de la comunicación por señales acústicas, ya que genera interferencia intersímbolo. La generación de múltiples caminos entre el transmisor y el receptor depende en gran medida de la configuración del enlace (Akyildiz et al., 2004). Si la comunicación se realiza a través de canales verticales, no se registra una pérdida por dispersión muy alta, debido principalmente a que las señales no encuentran obstáculos para reflexionar, mientras que los canales horizontales, debido al efecto de la superficie, pueden sufrir mayores pérdidas. El nivel de dispersión y deterioro de la señal está en función de la profundidad y la distancia entre el transmisor y el receptor (Sendra Compte, 2012).. Figura 1.9. Representación de la propagación multitrayecto (Aparicio et al., 2010). . Retardo variable. La velocidad de propagación en un canal de comunicación acústico es cinco órdenes de magnitud menor que en un canal de radiofrecuencia. Esta alta demora.
(30) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 20. de propagación (0.67 s/km) reduce la eficiencia del sistema considerablemente (Akyildiz et al., 2004). Debido a la naturaleza del medio, la variación de retardo de la señal puede ser muy alto y puede llegar a ser muy perjudicial para el diseño eficiente de un protocolo, ya que se complica la estimación del tiempo de ida y vuelta (RTT), un parámetro importante para muchos protocolos de comunicación comunes (Sendra Compte, 2012). . Efecto Doppler. El espaciamiento en la frecuencia producido por el efecto Doppler es significativo en las comunicaciones inalámbricas que emplean señales acústicas (Stojanovic, 2003), causando degradación en el desempeño de las comunicaciones digitales, ya que la transmisión a alta razón de datos produce que numerosos símbolos adyacentes se interfieran en el receptor, haciendo que se requiera un procesamiento sofisticado de la señal para tratar con la interferencia intersímbolo generada. . Velocidad de propagación. La velocidad del sonido en el agua constituye otra de las particularidades del canal subacuático, y depende de factores como: temperatura, salinidad y presión; este último estrechamente relacionado con la profundidad (Ortiz Guerra, 2011). La velocidad típica de propagación de las señales acústicas en el agua es de 1500 m/s aproximadamente (Akyildiz et al., 2004, Preisig, 2007, Raichel, 2006, Stojanovic and Preisig, 2009), siendo cuatro veces más rápida que en el aire pero cinco órdenes de magnitud más pequeña que la velocidad de la luz. En términos aproximados, la velocidad del sonido aumenta 4,0 m/s por cada grado Celsius que aumenta la temperatura del agua. Cuando la salinidad aumenta una unidad práctica de salinidad (PSU), la velocidad del sonido en el agua crece 1,4 m/s, mientras que por cada km de profundidad, se incrementa unos 17 m/s (Sendra Compte, 2012). Se puede plantear que las mayores contribuciones a la velocidad del sonido se producen debido a la temperatura en la zonas próximas a la superficie y a la presión en las zonas más profundas (Sánchez Matias, 2013). La velocidad del sonido tiene una fuerte implicación en el diseño de los sistemas de comunicaciones subacuáticos, ya que esta implica un gran retardo en la señal, lo.
(31) CAPÍTULO 1. PARTICULARIDADES DE LAS COMUNICACIONES SUBACUÁTICAS.. 21. que reduce severamente la eficiencia de cualquier protocolo de comunicación que necesite retroalimentación desde el receptor o establecimiento de la conexión entre el transmisor y el receptor (Stojanovic, 2006). A pesar de las características desfavorables que presentan las señales acústicas descritas anteriormente, estas tienen una mejor aplicación en entornos subacuáticos que el resto de las tecnologías estudiadas. Las señales acústicas presentan menor atenuación y pérdidas por absorción que las ondas electromagnéticas y las señales ópticas. Son más robustas en entornos subacuáticos y ofrecen tasas de transmisión que le permiten alcanzar mayores distancias. La velocidad de transmisión de las señales acústicas aumenta con la profundidad, además de que son más estables térmicamente y a profundidades considerables. Todo esto las hace la tecnología más utilizada en aplicaciones que requieran el empleo de comunicaciones subacuáticas. 1.5 Consideraciones finales Después del análisis desarrollado anteriormente se puede observar que el vehículo HRC-AUV necesita, para lograr un mejor desempeño, una solución de comunicación que le permita cumplir sus tareas y comunicarse con la estación de control cuando está bajo el agua. Para ello la tecnología a utilizar la constituyen las señales acústicas. La mayoría de los factores que afectan a esta tecnología son causados por las propiedades físicoquímicas del medio acuático. Estas particularidades conjuntamente con la naturaleza de la guía de onda del canal, provocan que el canal acústico sea temporal y espacialmente variable. Se puede apreciar que las ondas acústicas están mejor situadas en ambientes subacuáticos debido a la baja atenuación, absorción y alto rango de transmisión de datos que las otras tecnologías también descritas anteriormente (ondas electromagnéticas y señales ópticas)..
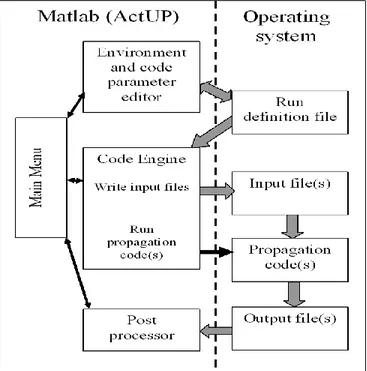
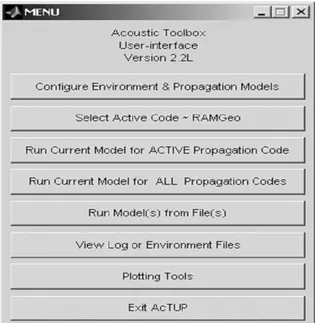
(32) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 22. CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 2.1 Introducción Una de las propiedades más importantes del océano es su alta sensibilidad a la propagación de las señales acústicas. Los modelos de propagación acústicos subacuáticos están diseñados para simular de manera crítica, en una gran variedad de casos, la propagación de la onda acústica, lo que permite la predicción de las características de este fenómeno (Duncan and Maggi, 2006). En este capítulo se describen diferentes modelos de propagación acústica existentes en la actualidad. Para ello se abordan sus principales características y los métodos matemáticos que les dan origen. Se exponen también, las características y el modo de funcionamiento de la herramienta de simulación AcTUP, la cual permite correr algunos de los diferentes modelos de propagación que serán tratados en el capítulo. Además, se proponen nuevos esquemas de comunicación para el vehículo HRC-AUV y la estación remota de control. 2.2 Arquitecturas de comunicación convenientes para el HRC-AUV En el capítulo anterior quedó representada la estructura de comunicación actual que posee el vehículo HRC-AUV para intercambiar datos con la estación remota de control. En este capítulo se pretende dar solución a dicha problemática proponiendo dos nuevas estructuras, las cuales han sido representadas en las Figuras 2.1 y 2.2:.
(33) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 23. Figura 2.1 Esquema de comunicación buque-submarino.. Figura 2.2. Esquema de comunicación boya-submarino. Como ha quedado reflejado en las figuras se pueden definir dos nuevas estructuras de comunicación: la primera es una comunicación buque-submarino y la segunda es una comunicación boya-submarino. La transmisión de la información, en ambos casos, se realiza en un mismo medio, tal como se muestra en la Figura 2.1 donde la comunicación ocurre totalmente bajo el agua empleando módems acústicos subacuáticos ubicados en el buque y en el AUV. En la segunda estructura, representada en la Figura 2.2, se puede observar que la boya presenta una antena en la parte superior (con la que se comunica con la estación remota) y una extensión bajo el agua con un modem que es el que se comunica con el submarino, transmitiendo la misma información pero empleando.
(34) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 24. señales acústicas. De esta manera el intercambio de datos se realizará totalmente bajo el agua sin necesidad de que el submarino interrumpa sus operaciones y tenga que salir a la superficie. Es preciso aclarar que la principal deficiencia que presenta el sistema actual es que se emplean señales de RF transmitidas en el aire para comunicarse con el submarino cuando este está sumergido, lo que produce que la información se degrade y se pierda en su totalidad ya que pasan de un medio a otro con índice de refracción distinto. Los nuevos esquemas de comunicación le permitirán al vehículo tener mayor movilidad y extender su rango de operaciones a una mayor distancia. Además aumentará la integridad de la información recibida, ya que la probabilidad de que la información se degrade disminuirá considerablemente. Los módems necesarios para garantizar la comunicación bajo las diferentes condiciones que requiere el HRC-AUV, serán propuestos más adelante en el tercer capítulo de esta investigación. 2.3 Modelos de propagación acústica subacuática La propagación acústica en el océano es extensivamente usada en la detección activa y pasiva de submarinos y barcos, en estudios sísmicos y en el desarrollo de las comunicaciones. La alta sensibilidad de la propagación de señales acústicas, con frecuencias comprendidas entre 1 Hz y 20 kHz, es una de las propiedades más importantes del océano y a diferencia de todos los tipos de radiaciones electromagnéticas, pueden recolectar una cantidad significativa de información referente al entorno marino a pequeña y gran escala. El objetivo principal de los modelos acústicos subacuáticos es simular la propagación de las ondas acústicas, para una gran variedad de casos, lo que provee las características y propiedades más importantes de este fenómeno. Existen una serie de limitaciones inherentes a estos modelos y tienen mucha relación con la descripción del medio en cuestión, así como con la descripción de la dispersión, la cual puede ser causada por varias razones como: irregularidades en la superficie, presencia de sustancias a la deriva, tanto artificiales como naturales, etc. (de Sousa Costa and Medeiros, 2011). Esta.
(35) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 25. sección está dedicada a describir los diferentes modelos de propagación acústica que se emplean en la actualidad y los métodos matemáticos en los que se basan. 2.3.1 La Ecuación de la onda Todos los códigos de propagación acústicas existentes últimamente están basados en la Ecuación de la onda (2.1) (Duncan and Maggi, 2006). Esta ecuación constituye el punto de partida para desarrollar la teoría física de la propagación del sonido (de Sousa Costa and Medeiros, 2011). 𝜌(𝑟, 𝑡)𝛻 ∗ [. 1 𝜌(𝑟,𝑡). 𝛻𝑝(𝑟, 𝑡)] −. 1 𝑐(𝑟). ∗ 2. 𝜕2 𝑝(𝑟,𝑡) 𝜕𝑡 2. = 𝑓(𝑟, 𝑡). (2.1). En esta ecuación ρ representa la densidad, p la presión, t el tiempo y r el vector de posición. El operador del gradiente espacial se encuentra indicado por la variable 𝛻, c es la velocidad del sonido en el medio y f es un término forzado que representa las fuentes acústicas. En la mayoría de las situaciones los mayores cambios en la densidad del océano ocurren sobre escalas espaciales relativamente largas, con la excepción de los bordes entre los medios (ej. el lecho marino) donde la densidad es efectivamente discontinua. En este caso, tomando un solo medio, la ecuación se puede reducir a (Duncan and Maggi, 2006): 1. 𝛻 2 𝜌(𝑟, 𝑡) − 𝑐(𝑟)2 ∗. 𝜕 2 𝑝(𝑟,𝑡) 𝜕𝑡 2. = 𝑓(𝑟, 𝑡). (2.2). Los cambios en el medio pueden ser manejados resolviendo la ecuación (2.2) de manera independiente para cada medio. Además usando condiciones de continuidad entre estos (usualmente se considera continuidad de la presión y la velocidad del sonido) se pueden evaluar los coeficientes desconocidos. Tomando como punto de partida la Ecuación de la onda en la actualidad se han desarrollado diferentes modelos de propagación, como son: Scooter & Fields, KRAKEN, KRAKENC, Bounce & Bellhop y RAM, entre otros. Estos modelos se pueden clasificar en dos grupos fundamentales: dependientes de la distribución e independiente de la distribución. Los tres primeros modelos que se abordan en este.
(36) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 26. capítulo son independientes de la distribución, los restantes pertenecen a la otra clasificación. 2.3.2 Scooter & Fields El modelo Scooter & Fields emplea el método de integración de la onda numérica, el cual se encuentra basado en el desarrollo matemático siguiente: asumiendo que el entorno es independiente de la distribución, entonces la velocidad del sonido y las condiciones de los bordes son funciones de la profundidad (z) únicamente. Si por otro lado, se asume una fuente puntual a una profundidad z = 𝑧𝑠 y una distancia (r) igual a 0, se puede determinar, partiendo de las ecuaciones anteriores, las siguientes dos ecuaciones referentes a la profundidad y a la distancia (Duncan and Maggi, 2006): 𝑑𝑝(𝑘𝑟 ,𝑧) 𝑑𝑧 2. + (𝑘 2 − 𝑘𝑟2 ) ∗ 𝑝(𝑘𝑟 , 𝑧) = 𝐴𝛿(𝑧 − 𝑧𝑠 ). (2.3). y ∞. 𝑝(𝑟, 𝑧) = ∫0 𝑝(𝑘𝑟 , 𝑧)𝐽0 (𝑘𝑟 𝑟)𝑘𝑟 𝑑𝑘𝑟. (2.4). donde 𝑘𝑟 es una constante de separación que resulta ser la componente horizontal del vector de la onda y 𝑝(𝑘𝑟 , 𝑧) es la solución de la ecuación (2.3) para un 𝑘𝑟 dado. Una gráfica de 𝑝(𝑘𝑟 , 𝑧) contra 𝑘𝑟 para una profundidad particular es conocida como el espectro horizontal de la onda numérica, y si 𝐴 = -1/2π, entonces se denomina función de Green dependiente de la profundidad. 𝐴 es una constante que depende de la amplitud de la fuente, δ es la función delta de Dirac y 𝐽0 es la función de Bessel de primer orden. Scooter soluciona la ecuación (2.3) calculando la función de Green dependiente de la profundidad para el medio ambiente tomado como referencia (Duncan and Maggi, 2005), mientras que Fields integra los resultados obtenidos de la función Green para dar solución a la ecuación (2.4) y determinar las pérdidas de transmisión usando una aproximación, que es válida para algunas longitudes de onda provenientes de la fuente, lo que permite que la ecuación (2.4) sea evaluada por una Transformada Rápida de Fourier. Este método es conocido como Fast-Field (Duncan and Maggi, 2006, Lloyd et al., 2011)..
(37) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 27. Esta técnica calcula las pérdidas de transmisión de toda la energía acústica, atrapada o no dentro de la onda. También puede hacer frente muy fácilmente a fondos oceánicos con capas elásticas, e incluso modelar las interfaces límites de la ola. Por tanto, es más precisa y fiable que el método del modo normal, del cual se hablará más adelante. Este modelo es, de lejos, la técnica preferida a utilizar en escenarios de baja frecuencia, corto alcance e independencia del ambiente. Sin embargo, computacionalmente es mucho más intenso que los modos normales para simular problemas de largo alcance, ya que la carga computacional aumenta rápidamente al aumentar la frecuencia (Duncan and Maggi, 2005). El modelo acústico Scooter & Fields es una manera eficiente, exacta y razonable de resolver problemas independientes de la distribución que puedan trabajar con fondos marinos arbitrarios comprendidos entre estratos elásticos y fluidos (Duncan and Maggi, 2006). 2.3.3 KRAKEN y KRAKENC Las soluciones correspondientes a la ecuación (2.3) son conocidas como funciones de los modos o Mode Functions y se pueden expresar mediante la ecuación (2.5): 𝜓𝑚 (𝑧) = 𝑝(𝑘𝑟𝑚 , 𝑧). (2.5). Los métodos de modos normales han sido usados a lo largo de los años para representar la propagación acústica bajo el agua. Hoy en día existen numerosos modelos basados en los modos normales, tales como KRAKEN y KRAKENC (Porter, 1991). El modelo KRAKEN encuentra los modos normales y las funciones de los modos buscando valores reales de 𝑘𝑟𝑚 , además de que es capaz de estimar la atenuación empleando técnicas de perturbación, mientras que KRAKENC busca los valores de 𝑘𝑟𝑚 requeridos para el plano complejo (Duncan and Maggi, 2006). KRAKEN funciona bien para estratos fluidos en el fondo marino. El modo normal solamente es representativo para la energía que está atrapada en la guía de onda, por lo que este método es inexacto a corta distancia donde el efecto de la energía no atrapada es significativo (Duncan and Maggi, 2005)..
(38) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 28. La búsqueda a lo largo del eje real es un problema numérico mucho más fácil de solucionar que la búsqueda en el plano complejo, pero que limita el ambiente, ya que KRAKEN puede manejarlo sin la presencia de estratos elásticos en el fondo del mar. La búsqueda en el plano complejo ejecutada por KRAKENC permite ocuparse de estratos elásticos y también es responsable de que una parte muy pequeña de la energía sea reflejada a través de los llamados “modos agujereados”, esto hace que sea más preciso a corta distancia que KRAKEN. Los modos agujereados corresponden a los valores de 𝑘𝑟𝑚 que se mantienen fuera del eje real aun en ausencia de atenuación en el lecho marino. Sin embargo, KRAKENC no siempre encuentra todo de los modos, lo que puede traer consigo errores significativos (Duncan and Maggi, 2005, Duncan and Maggi, 2006). Las funciones de modos ejecutadas por cualquiera de estos métodos en programas computacionales pueden estar usando Fields, lo cual permite determinar las pérdidas de propagación en un punto determinado y evalúa la presión empleando la ecuación (2.6) (Duncan and Maggi, 2006): 𝑖. (1) 𝑝(𝑟, 𝑧) = 4𝜌(𝑧 ) ∑∞ 𝑚=1 𝜓𝑚 (𝑧𝑠 )𝜓𝑚 (𝑧)𝐻0 (𝑘𝑟𝑚 𝑟) 𝑠. (2.6). Es también posible extender el método de los modos normales a problemas dependientes del rango de distribución, evaluando los modos a diferentes distancias y luego usando uno o dos métodos para determinar cómo la amplitud de los modos a una distancia determinada depende de las distancias anteriores. 2.3.4 Bounce & Bellhop Bellhop es un modelo de trazado de rayos (rays) y haces (beams) que permite predecir los campos de presión acústica en entornos oceánicos. Entre los diferentes tipos de haces que pueden ser implementados en este modelo se encuentran: el tipo Gaussiano y el modelado tipo sombrero, empleando leyes geométricas y físicas basadas en esparcimiento (Duncan and Maggi, 2006). Bellhop puede producir una gran variedad de salidas útiles entre las que se encuentran incluidas: las pérdidas de transmisión, las coordenadas de los rayos, la presión acústica, los arribos y el tiempo que tarda la señal en llegar a los receptores (Camargo Rodriguez, 2008). El.
(39) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 29. modelo tiene en cuenta la dependencia existente con la distancia tanto en los límites superiores como inferiores del océano (altimetría y batimetría), así como también el perfil de la velocidad del sonido. Algunos archivos de entrada adicionales toman en cuenta las especificaciones de fuentes direccionales, así como también propiedades geoacústicas del medio delimitante. Empleando el modelo Bounce se pueden determinar los coeficientes de reflexión en la interfaz inferior de la columna de agua (Duncan and Maggi, 2006). La opción de trazado de rayos que presenta este modelo acústico, produce un archivo que contiene un conjunto de rayos emitidos desde una fuente determinada. Estos archivos son empleados generalmente para obtener una percepción de como la energía se está propagando a través del canal. Si además de la intensidad debida a la fuente tonal, se desea obtener la serie de tiempos que demora la señal, entonces se selecciona la opción de cálculo de llegadas. El archivo de llegadas resultante contiene una serie de pares que muestran la amplitud y demora de la señal, definiendo de esta manera la sonoridad y la demora para cada eco en el canal (Porter, 2011). Las pérdidas de transmisión calculadas por el modelo Bellhop se pueden clasificar en coherentes, no coherentes y semicoherentes. Las pérdidas de transmisión no coherentes y semicoherentes intentan capturar menos detalles del campo acústico. Como resultado, Bellhop puede correr con requisitos de menor exactitud (menos haces y pasos de mayor tamaño) (Camargo Rodriguez, 2008). Los códigos de haces que emplea este modelo reducen los problemas debidos a las zonas de sombra y pueden ser usados a frecuencias inferiores que los códigos de rayos. Sin embargo, siguen siendo códigos de frecuencia intrínsecamente altos. Bellhop además, es capaz de leer archivos de batimetría que especifican la profundidad del agua como una función de la distancia, lo que le permite manejar ambientes con cierta dependencia de la distribución (Duncan and Maggi, 2006). Este modelo es implementado por diferentes softwares como MatLab, Fortran y Python y usado en múltiples plataformas como Mac, Windows y Linux (Camargo Rodriguez, 2008)..
(40) CAPÍTULO 2. MODELOS DE PROPAGACIÓN ACÚSTICA SUBACUÁTICA.. 30. 2.3.5 RAM El modelo acústico dependiente de la distancia o RAM (Range-dependent Acoustic Model) desarrollado por Mike Collins (Collins, 1993) es un modelo ampliamente usado para modelar la propagación del sonido bajo el agua a frecuencias bajas y medias (Heaney and Campbell, 2016). El modelo implementa un algoritmo extremadamente eficiente que permite lograr una relación de compromiso entre los ángulos de propagación que pueden ser modelados con precisión y la velocidad de computación. RAM viene en varias variantes (Duncan and Maggi, 2006): . RAM: maneja lechos marinos fluidos, con un estrato específico relativo a la superficie del agua. (Los estratos son horizontales). . RAMGeo: trabaja con lechos marinos fluidos, con un estrato específico relativo al fondo del mar. (Los estratos necesitan información de batimetría). . RAMS: es igual que RAM, pero puede manejar lechos marinos elásticos.. . RAMSurf: igual que RAMGeo, pero además introduce en la computadora un archivo especificando la altura del límite superior de la columna de agua como una función de la distribución.. El método RAM está basado en la aproximación de las ecuaciones parabólicas (Parabolic Equations, PE) y usa el acercamiento por los términos de la serie de Padé (para más detalle consultar (Duncan and Maggi, 2006)) para lograr una alta eficiencia y la capacidad de modelar la propagación a grandes ángulos respecto a la horizontal (lo que es una limitación habitual en los códigos PE) (Duncan and Maggi, 2005, de Sousa Costa and Medeiros, 2011). Existe un equilibrio entre el rango angular y la velocidad de cálculo que se rige por el número de términos que el usuario específica para la aproximación de Padé: cuantos más términos, mayor será el ángulo, pero el código que se ejecuta será más lento (Duncan and Maggi, 2005). RAM es notable por su habilidad de justificar las variaciones de la topografía en el lecho marino con respecto a la distancia, además de que es capaz de modelar la propagación del sonido en ambientes totalmente dependientes de la distribución, es.
Figure

+7

Documento similar
El nuevo Decreto reforzaba el poder militar al asumir el Comandante General del Reino Tserclaes de Tilly todos los poderes –militar, político, económico y gubernativo–; ampliaba
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
dente: algunas decían que doña Leonor, "con muy grand rescelo e miedo que avía del rey don Pedro que nueva- mente regnaba, e de la reyna doña María, su madre del dicho rey,
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
