Simulación de la modulación vectorial de ancho de pulso
88
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética. TRABAJO DE DIPLOMA “Simulación de la Modulación Vectorial de Ancho de Pulso” Autor: Yander Calos Machín Suárez E-mail: [email protected] Tutor: MSc Lesyani León Viltre Dpto. de Electroenergética. Facultad de Ing. Eléctrica. UCLV. E-mail: [email protected] Santa Clara 2013 "Año 55 de la Revolución.".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “Nunca consideres el estudio como un deber, sino como una oportunidad para penetrar en el maravilloso mundo del saber.”. Albert Einstein.
(5) ii. DEDICATORIA. Primeramente dedicarle este trabajo de diploma a todos aquellos que desde un principio creyeron en mí. A mi mamá Clara Suarez Mendoza. A mi papá Carlos Alexis Machín Zuaznabar. A mi abuela Teonila Zuaznabar. Y muy especialmente para alguien muy importante para mí, por enseñarme a dar los primeros pasos de mi vida, donde quiera que estés a mi abuela Benedicta Mendoza..
(6) iii. AGRADECIMIENTOS. Agradecer primero que todo a mi mamá Clara Suarez Mendoza por estar allí cuando la he necesitado y por ser mi guía en todo momento. A mi papá Carlos Alexis Machín Zuaznabar por de una manera u otra saber brindarme su apoyo que mucha falta me ha hecho en los momentos más importantes. A Mi abuela Teonila por ser sencillamente ella, mi motor propulsor, un millón de gracias mi Abu querida y gracias por existir y ser mi ángel guardián. A mi tía Dayami , tía Karenia , primo Karell , tío Franco por darme todo lo que siempre he necesitado,. por su apoyo sobre todo y por hacerme saber que. siempre están allí. A mi padrastro David Pérez por su apoyo incondicional y a Yurita Pérez por ser una persona muy especial para mí y por saberme comprender y dar su apoyo cuando lo he necesitado, gracias una vez más. A mis hermanos Digzan, Zandrianys y Bryankell por forzarme a ser un ejemplo para ustedes, que son una gran parte de mi razón de ser. A Bertha y a Robe por ser más que amigos incondicionales y ser como parte ya de mi familia. A tía Iris y tío Arturo por ayudarme cuando más lo he necesitado. A mis abuelos Machín, Conrado donde quiera que estén por darme fuerza cuando las he necesitado..
(7) iv A mi abuela Benedicta por protegerme desde allá arriba, y. por construir la. persona que soy. A mis amigos de carrera Mario ( sobre todo por aguantar mis pesadeces y por nunca tener un no cuando he necesitado su ayuda), Robe( por ser de mis amigos VIP del aula) , Alejandro (mi primo, por ser mi compañero de mesa, la mejor del aula ), Jenrry ( por ser tan pesao jeje), el Luiso,Raunel y Harold( por ser amigos de siempre), a Frank (que me dijo que si no lo ponía íbamos a tener problemas) en fin a todos del aula (con excepciones) por ayudarme en los momentos claves que he necesitado su ayuda dígase especialmente Yerson, Dayron . A mi familia universitaria, el conjunto danzario 5 de diciembre por estar allí para ser motivo de mis alegrías, mis sonrisas, mis nerviosismos, por ayudarme a que la universidad fuera mucho más divertida, por bailar con ustedes y poder sentir lo que es bailar, por criticarme, por corregirme, por ayudarme a ser mejor persona, por ayudarme a combatir mis problema de autoestima, sencillamente por ser ustedes y por ayudar a construir uno de mis mejores recuerdos, pasar por la UCLV y pertenecer por siempre a 5 de Diciembre. A Dayana, Heydi, y Vanesa por acogerme en sus brazos cuando apenas comenzaba y ya ustedes eran veteranas, y enseñarme a estudiar, a fiestar, a gozar la universidad, gracias por ser un ejemplo. A Luis Emilio, Eduardo Y Yusniel por ser grandes amigos con los que siempre he podido contar y llenar la barriga, de veras mil gracias por estar allí también cuando los he necesitado y por permitirme ser su amigo. A Julio, Yosmany, Yari, Javier, Yelena por ser amistades desde mi época de pre y que perduran para siempre, gracias por su apoyo también. Al resto de mi familia y amigos que no por dejar de decir sus nombres son menos importantes para mí porque todos me han apoyado incondicionalmente y han sabido apoyar con su granito de arena que han sido muchos granitos. A mi tutora Lesyani León por su apoyo y ayudarme a creer que sí se podía cuando creí perdida la batalla final, profe un millón de gracias por su ayuda, siempre le estaré agradecido..
(8) v. TAREA TÉCNICA. Trabajo de diploma: Simulación vectorial de ancho de pulso. Estudiar la bibliografía relacionada con las técnicas de modulación de ancho de pulso y la modulación vectorial. Realizar la simulación en MATLAB del comportamiento de técnicas de modulación. Realizar la simulación en MATLAB de la modulación vectorial. Realizar un análisis de los resultados obtenidos en la simulación.. Firma del Autor. Firma del Tutor. diferentes.
(9) vi. RESUMEN. Existen varias técnicas de modulación de ancho de pulso (PWM), la mayoría de ellas se imparten en la docencia del pregrado y el postgrado. Una de las más importantes técnicas de modulación la constituye la modulación vectorial del ancho del pulso (SV PWM). Esta presenta varias ventajas sobre las demás técnicas comunes pero su aplicación resulta más compleja, debido a esto es necesario buscar herramientas como la simulación, para facilitar su impartición y mejor entendimiento. En este trabajo nos damos la tarea de simular, utilizando en Simulink del Matlab, la SV PWM para accionar un motor de inducción y de esta forma, poder analizar el comportamiento de dicha técnica de modulación..
(10) vii. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................. v RESUMEN ............................................................................................................................vi INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. Modulación en inversores. .................................................................... 3. 1.1. Inversores. .............................................................................................................. 3. 1.2. Control de voltaje mediante la técnica de modulación en inversores. monofásicos. ..................................................................................................................... 5 1.2.1. Modulación de un solo ancho de pulso. ..................................................... 7. 1.2.2. Modulación de varios anchos de pulso. ..................................................... 8. 1.2.3. Modulación senoidal del ancho de pulso. .................................................. 9. 1.2.4. Modulación senoidal modificada del ancho de pulso. ............................ 11. 1.2.5. Modulación a 60°. ........................................................................................ 12. 1.3. Control de voltaje en inversores trifásicos. ..................................................... 13. 1.3.1 1.4. Modulación SPWM Bipolar (SPWM o CB-SPWM). ................................ 14. Técnicas avanzadas de modulación. ............................................................... 15. 1.4.1. Modulación trapezoidal. .............................................................................. 16.
(11) viii 1.4.2. Modulación en escalera. ............................................................................. 17. 1.4.3. Modulación escalonada. ............................................................................. 18. 1.4.4. Modulación por inyección de armónicas. ................................................. 19. 1.4.5. Modulación en delta..................................................................................... 20. 1.5. Modulación vectorial de ancho de pulso (SV PWM). .................................... 21. 1.5.1. Representación de las tensiones trifásicas en el espacio vectorial. .... 22. 1.5.2. Forma de trabajo de la modulación vectorial........................................... 27. 1.5.3. Secuencias de conmutación. ..................................................................... 29. 1.5.4. Operación en sobre modulación y six-step. ............................................. 31. 1.6. Comparación de algunas PWM y SV PWM. ................................................... 33. 1.7. Consideraciones finales. .................................................................................... 34. CAPÍTULO 2.. Implementación computacional en Simulink/MATLAB de técnicas. de modulación… ................................................................................................................ 36 2.1. Estructura general del proyecto. ....................................................................... 36. 2.2. Simulación de algunas técnicas de modulación............................................. 37. 2.2.1. Modulación senoidal de ancho de pulso. ................................................. 37. 2.2.2. Modulación Delta. ........................................................................................ 38. 2.2.3. Modulación por inyección de armónicos. ................................................. 38. 2.2.4. Modulación Trapezoidal. ............................................................................. 39. 2.3. Modelo en estudio. .............................................................................................. 40. 2.3.1. Descripción de los Bloques importantes del SimPowerSystems. ....... 41. 2.3.1.1. Bloque “Three-Phase V-I Measurement”.............................................. 41. 2.3.1.2. Bloque “Discrete PLL-Driven Fundamental Value”. ............................ 43. 2.3.1.3. Bloque “Mosfet inverter”. ......................................................................... 46. 2.3.1.4. Bloque “PLL”. ........................................................................................... 48.
(12) ix 2.3.1.5. Bloque “Ideal Switch”. .............................................................................. 50. 2.3.1.6. Bloque “3 HP, 220 V, 60 Hz Asynchronous Machine”. ...................... 52. 2.3.1.7. Bloque “Discrete SV PWM Generator”. ................................................ 55. 2.4. Consideraciones finales. .................................................................................... 61. CAPÍTULO 3. 3.1. Resultados de la simulación. .............................................................. 62. Breve resumen del comportamiento de los armónicos de algunas. técnicas PWM. ................................................................................................................ 62 3.2. Descripción del circuito en estudio. .................................................................. 63. 3.3. Resultados de la simulación .............................................................................. 64. 3.3.1. Simulación de la Modulación senoidal de ancho de pulso. ...................... 64. 3.3.2. Simulación de la Modulación Delta. .............................................................. 65. 3.3.3. Simulación de la Modulación por inyección de armónicos. ...................... 65. 3.3.4. Simulación de la Modulación Trapezoidal. .................................................. 66. 3.3.5. Simulación de la Modulación vectorial de ancho de pulso. ...................... 66. 3.4. Consideraciones finales. .................................................................................... 72. CONCLUSIONES Y RECOMENDACIONES ................................................................... 73 Conclusiones .................................................................................................................. 73 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 74.
(13) INTRODUCCIÓN. 1. INTRODUCCIÓN. Existe una gran variedad de técnicas de modulación para convertidores de tensión de continua a alterna (DC/ AC) o comúnmente denominados inversores las cuales actúan sobre un puente inversor monofásico o trifásico. Según las características de estas técnicas, las propiedades de eficiencia en la conversión, contenido armónico de la señal de salida y pérdidas en el puente inversor cambian. Las modulaciones de la anchura del pulso son algunas de las técnicas de modulación más conocidas en la enseñanza superior en los cursos de postgrado y de pregrado, cada una de ellas con un concepto y funcionamiento específico y determinado. Sin embargo la modulación vectorial de ancho de pulso (SVPWM) aunque es de las más utilizadas actualmente en el accionamiento para motores de inducción y en sistemas de alimentación trifásica, y a la vez presenta las mejores características de desempeño que las técnicas de modulación escalares o PWM no se tiene referencia de su comportamiento simulado en el pregrado y el post grado de nuestra universidad, por lo que es necesario ayudar a la familiarización de dicha técnica de modulación utilizando la simulación. Con estos elementos queda contextualizado como problema científico: ¿Cómo brindar una herramienta que ayude al mejor entendimiento de la modulación vectorial en el pregrado y en el postgrado? Para contribuir a resolver el problema científico planteado, nuestro objetivo general seria simular la técnica de modulación vectorial del ancho de pulso aplicada a un motor de inducción para poder analizar su comportamiento. Como objetivos específicos:.
(14) INTRODUCCIÓN. 2. 1. Revisar el estado del arte de las diferentes técnicas de modulación. 2. Simular en MATLAB. el comportamiento de. diferentes técnicas de. modulación y simular la modulación vectorial aplicada a un motor de inducción. 3. Analizar los resultados obtenidos. La estructura establecida para este informe de trabajo de diploma consta de tres secciones fundamentales: la introducción, el cuerpo del trabajo y la conclusiva. La sección introductoria abarca la tarea técnica, el resumen y la introducción del trabajo. El cuerpo del trabajo se dividió en tres capítulos que dan respuesta a los objetivos específicos. El capítulo uno se expone la fundamentación teórica y matemática que soporta la explicación de los fenómenos concernientes a la modulación PWM y la modulación PWM vectorial. En el capítulo dos se realiza la simulación en Simulink/MATLAB de algunas técnicas de modulación y se realiza una explicación detallada de los bloques más importantes utilizados durante la simulación. El capítulo tres se realiza un pequeño resumen del contenido de armónico de algunas técnicas de modulación y muestra las gráficas de la simulación donde se puede apreciar el comportamiento de la onda de salida así como el orden de los armónicos de diferentes parámetros de la modulación vectorial de ancho de pulso. La. sección. conclusiva. referencias bibliográficas.. contiene. las. conclusiones,. recomendaciones,. las.
(15) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 3. CAPÍTULO 1. Modulación en inversores.. La modulación por ancho de pulsos (PWM por sus. siglas en inglés) es una. técnica usada ya desde hace varias décadas para producir señales cuadradas o pulsos de amplitud variable que disparan los dispositivos de conmutación que componen un puente inversor. En este capítulo se expondrá la fundamentación teórica y matemática que soportan la explicación de los fenómenos concernientes a la modulación PWM y la modulación PWM vectorial. 1.1. Inversores.. Los inversores son circuitos que producen una tensión alterna con magnitud y frecuencia deseada monofásica o trifásica, dependiendo del número de brazos o ramas que tenga (Fig. 1.1), a partir de una fuente de alimentación continua(González Dany 2002) . Los inversores están constituidos por elementos de conmutación como BJT, GTO, IGBT o MOSFET. Estos dispositivos deben ser encendidos por medio de pulsos de disparo generados a partir de otros circuitos. Generalmente estos pulsos son generados usando la técnica de Modulación de Ancho de Pulsos o PWM. La forma de onda a la salida de los inversores reales no es exactamente sinusoidal debido a los efectos de la conmutación en la creación de estas ondas, por lo que para aplicaciones de potencia es necesario obtener señales con muy baja distorsión armónica y muy pocas pérdidas de potencia. Dada la disponibilidad de los dispositivos semiconductores de potencia de alta velocidad, es posible minimizar o reducir significativamente el contenido armónico del voltaje de salida mediante las técnicas de conmutación..
(16) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 4. La entrada puede ser una batería, una celda de combustible, una celda solar u otra fuente de cd. Las salidas monofásicas típicas son: . 120V a 60Hz. . 220V a 50Hz. . 115V a 400Hz. Para sistemas trifásicos de alta potencia, las salidas típicas son: . 220/380V a 50Hz. . 120/208V a 60Hz. . 115/200V a 400Hz. El principio de operación que rige un inversor puede clasificarlo así: En fuente de tensión (VSI). En fuente de corriente (CSI) que se usan en sistemas de alta potencia. dependiendo de la aplicación respectiva. Dentro de esta clasificación existen varias configuraciones de conversores DC/AC que dependen de la aplicación final y el nivel de voltaje o corriente de su salida. Las aplicaciones destinadas al principio de operación en fuente de tensión se reservan para aplicaciones en baja y mediana potencia y tiene que ver con cargas cuya regulación de voltaje debe ser óptima y donde se debe garantizar el nivel de tensión exacto requerido. Mientras que la segunda que se usan en sistemas de alta potencia va dirigida a las cargas donde la corriente debe ser mantenida dentro de ciertos límites, este caso se presenta generalmente en las máquinas rotativas como los motores de inducción..
(17) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 5. Figura 1.1 Puente Inversor Trifásico Existen dos restricciones de operación para el inversor trifásico (López Mesa Diana Jimena 2007) de la Figura1.1: . Nunca se puede cortocircuitar la fuente DC, lo que se traduce en que en una misma rama no pueden conducir los dos conmutadores a la vez.. Nunca se debe dejar en circuito abierto las inductancias del lado de la carga, lo que se traduce en que siempre debe haber algún semiconductor conduciendo en cada rama. La aplicación práctica de los inversores es un campo muy amplio dentro de los que cabe destacar: propulsión de motores de corriente alterna de velocidad variable, filtros activos, fuentes de poder ininterrumpible (UPS), fuentes de poder AC, entre otros(Kasmiercowski Marian octubre 1998). En el inversor con fuente de voltaje la técnica de modulación se encarga de la forma de onda de la señal de salida AC, su nivel de tensión y su frecuencia. 1.2. Control de voltaje mediante la técnica de modulación en inversores monofásicos.. En muchas aplicaciones industriales, a menudo es necesario controlar el voltaje de salida de los inversores(Holft 1964) para hacer frente a las variaciones de entrada de cd,(Holft 1973) para la regulación del voltaje de los inversores y para los requisitos de control constante del voltaje y la frecuencia. Existen varias.
(18) CAPÍTULO 1. MODULACIÓN EN INVERSORES. técnicas para modificar la ganancia del inversor. El método más eficiente. 6 de. controlar la ganancia (y el voltaje de salida) es incorporar en los inversores el control de modulación del ancho de pulso (PWM). Las técnicas comúnmente utilizadas son: Modulación de un solo ancho de pulso. Modulación de varios anchos de pulso. Modulación senoidal del ancho de pulso. Modulación senoidal modificada del ancho de pulso. Modulación a 60°. La elección de una técnica de modulación u otra depende de los factores que caracterizan la aplicación, como son entre otros(Noreña 2008): Nivel de potencia a controlar. Dispositivos semiconductores empleados. Requisitos de la carga. Características de la forma de onda de salida (Distorsión, amplitud, frecuencia,...). Una de las técnicas más utilizadas es la modulación por ancho de pulso (PWM) con sus múltiples variantes. Tiene como principal ventaja la sencillez en su implementación, pero como contrapartida, no se adaptan bien a la respuesta dinámica en cargas no lineales y poseen elevadas pérdidas por conmutación que se producen cuando se requiere una distorsión armónica total (THD) de bajo valor, debido a que el número de conmutaciones debe ser elevado.. ( ). √. (1.1).
(19) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 7. 1.2.1 Modulación de un solo ancho de pulso. En el control por modulación de un solo ancho de pulso, existe un solo pulso por cada medio ciclo, el ancho del pulso se hace variar, a fin de controlar el voltaje de salida del inversor. Las señales de excitación se generan comparando una señal rectangular de frecuencia de amplitud, amplitud. con una onda portadora triangular de. . La frecuencia de la señal de referencia determina la frecuencia. fundamental del voltaje de salida(Rashid 1995). Si se varía el ancho de pulso. desde 0 hasta. , puede modificarse desde 0 hasta 180.La relación de. , con. es la variable de control y se define como el índice de modulación de la amplitud, o simplemente índice de modulación: (1.2) El índice de modulación permite obtener tensión variable a la salida del inversor. El voltaje rms de salida se puede determinar a partir de: [ ⁄. ∫. ⁄ ⁄. ⁄. (. )]. √ ⁄. Figura 1.2 Modulación de un solo ancho de pulso.. (1.3).
(20) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 8. 1.2.2 Modulación de varios anchos de pulso. Utilizando varios anchos de pulso en cada ciclo de voltaje de salida puede reducirse el contenido armónico. La generación de señales de excitación para activar o desactivar los tiristores aparece en la figura 1.3, mediante la comparación de una señal de referencia con una señal onda portadora triangular. La frecuencia de la señal de referencia establece la frecuencia de salida,. , y la frecuencia de. la portadora, , determina el número de pulsos por cada ciclo. . El índice de. modulación controla el voltaje de salida(Rashid 1995). Esta modulación también se conoce como modulación uniforme de ancho de pulso (UPWM).Este tipo de pulsos por medio ciclo se determina a partir de: ⁄. ⁄. Donde. ⁄. (1.4). y se define como la relación de modulación de frecuencia.. La variación del índice de modulación pulso desde 0 hasta ⁄. desde 0 hasta 1 varia el ancho de. y el ancho de voltaje desde 0 hasta. . El voltaje de. salida para los inversores monofásicos en puente aparece en la figura 1.3 para UPWM. Si. es el ancho de cada pulso, el voltaje rms de salida se puede determinar a. partir de:. [. ⁄. ∫. ⁄ ⁄. ⁄. (. )]. √. ⁄. (1.5).
(21) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 9. Figura 1.3 Modulación de varios anchos de pulso. 1.2.3 Modulación senoidal del ancho de pulso. La modulación por ancho de pulsos sinusoidal (SPWM) consiste en generar pulsos de ancho proporcional a la amplitud de una señal de referencia o moduladora. Esta última consiste en una señal sinusoidal típica que es comparada con una señal portadora cuya forma es triangular véase en la figura 1.4. Los puntos de intersección demarcan los momentos en los que ocurren los flancos de subida y de bajada de los pulsos de anchura variable; esta señal pulsante contiene implícitamente toda la información sobre la onda moduladora (amplitud y frecuencia) y el fin es poder transmitir estas características hacia el lado de potencia donde se encuentra la carga, reproduciendo los pulsos con la acción de los dispositivos de disparo forzado y la fuente de voltaje DC que alimenta el puente(Noreña 2008). Si un tren de pulsos es enviado al dispositivo S1 (Figura 1.1), a S2 llegarán pulsos invertidos a los primeros, esto garantiza que la rama no pondrá en corto circuito la fuente de alimentación..
(22) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 10. Figura 1.4 Modulación senoidal de ancho de pulso. La señal obtenida a la salida del inversor como consecuencia de la aplicación de este tipo de pulsos de control no corresponde explícitamente a una señal sinusoidal, sino que viene con una serie de armónicos asociados a dicho proceso(Noreña 2008). El voltaje rms de salida puede controlarse si se varia el índice de modulación. Es fácil observa que el área de cada pulso corresponde aproximadamente al área bajo la onda senoidal entre los puntos medios adyacentes de los períodos inactivos de la señal de excitación(Rashid 1995).Si orden. es el ancho de pulso de. , la ecuación para el voltaje de salida es : ⁄. (∑. ⁄ ). (1.6). El PWM empuja las armónicas al rango de las altas frecuencias alrededor del valor de conmutación ,. y sus múltiplos, es decir, alrededor de las armónicas. y así sucesivamente. Las frecuencias a las cuales ocurren las. armónicas de voltaje se pueden relacionar por: (. ). (1.7).
(23) CAPÍTULO 1. MODULACIÓN EN INVERSORES. Donde la armónica de orden la relación frecuencia modular. 11. se iguala a la banda lateral de orden. de veces. .. para j= 1, 2, 3,… y k= 1, 3, 5,... (1.8). Se puede determinar el voltaje pico aproximado de la fundamental de salida para el control PWM y SPWM, a partir de: para Para. (1.9). , la ecuación anterior da la amplitud máxima de voltaje fundamental de. salida como. (. ). .Pero. (. ). puede ser tan alto como. ⁄. para una. salida de onda cuadrada. A fin de aumentar el voltaje fundamental de salida, deberá incrementarse más allá de 1.0. La operación más allá de. se llama. sobremodulación que básicamente lleva a una operación de onda cuadrada y añade más armónicas en comparación con la operación de rango lineal(2002). En operaciones que requieren de baja distorsión como las fuentes ininterrumpible de poder UPS la sobremodulación suele evitarse. 1.2.4 Modulación senoidal modificada del ancho de pulso. Los anchos de los pulsos más cercanos al pico de la onda senoidal no cambian en forma significativa con la variación del índice de modulación. Esto se debe a las características de una onda senoidal, esta técnica se puede modificar de tal forma que la onda portadora se aplique durante el primero y el último intervalo de de cada medio ciclo(es decir de 0 a. y de. a. ).Este tipo de. modulación se conoce como MSPWM. La componente fundamental se incrementa y las características armónicas mejoran, esto reduce el número de conmutaciones de los dispositivos de potencia y las pérdidas por conmutación(Rashid 1995)..
(24) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 12. Figura 1.5 Modulación senoidal modificada de ancho de pulso. 1.2.5 Modulación a 60°. La técnica de modulación PWM a 60° se basa en la adición de señal de referencia señales de secuencia cero (ZSS). El objetivo es «achatar» la forma de onda de voltaje de salida desde los 60° hasta los 120° y desde 240° a 300°. Los dispositivos del puente inversor se mantienen encendidos durante un tercio de ciclo y se presentan menos pérdidas por conmutación(Contreras 2005). La técnica de modulación PWM a 60° aprovecha mejor la tensión del bus de DC, alcanzando una tensión de fase igual a. .La componente de secuencia cero añadida. a la señal sinusoidal de referencia se puede aproximar por: ( ). √. ( ). (. ). (. ). (. ) (1.10).
(25) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 13. Figura 1.6 Modulación a 60° de ancho de pulso. 1.3. Control de voltaje en inversores trifásicos.. Un inversor trifásico puede considerarse como tres inversores monofásicos, con la salida de cada inversor monofásico desplazada. . Las técnicas de control de. voltaje analizadas anteriormente son aplicables a los inversores trifásicos. Como ejemplo, la generación de señales de excitación con modulación senoidal de ancho de pulso aparece en la figura 1.7. Se muestran tres ondas sinoidales de referencia, cada una de ellas desplazadas. . Una onda portadora con la señal. de referencia correspondiente a una fase, a fin de generar señales de excitación de dicha fase. Para generar el voltaje de salida se elimina la condición de que dos dispositivos de conmutación de una misma rama no pueden conducir simultáneamente(Capitaneanu 2001)..
(26) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 14. Figura 1.7 Modulación PWM trifásica El patrón de pulsos de la modulación PWM mostrado en la figura 1.7 mantiene siempre en conducción 3 de los 6 dispositivos del puente inversor trifásico en un instante determinado (por ejemplo en t = 0.02, línea roja)(Noreña 2008). 1.3.1 Modulación SPWM Bipolar (SPWM o CB-SPWM). Esta modulación genera la inversión de voltaje utilizando un tren de pulsos cuyo ancho depende del tiempo y del nivel de tensión deseado en la salida. La integración en el tiempo de este tren de pulsos representa una señal sinusoidal. Se conoce también como triangular carrier-based sinusoidal PWM (CB-SPWM) o método de sub-oscilación y fue propuesto en la década de los años sesenta. El tren de pulsos se forma por la comparación de una portadora triangular a una frecuencia específica. con tres señales de referencia sinusoidal. y. desfasadas 120° entre sí (Figura 1.8). La tensión de salida en AC contendrá armónicos a múltiplos de la frecuencia de la señal portadora(López Mesa Diana Jimena 2007)..
(27) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 15. Figura 1.8 Diagrama en bloques del generador CB-SPWM. Las referencias están desfasadas 120° entre sí. La técnica de modulación CB-SPWM, es del orden de π/4 o 0.785 para un índice de modulación igual a uno. Cuando el índice de modulación de amplitud sobrepasa la unidad, el inversor trabaja en la zona no lineal y gradualmente alcanzará la amplitud máxima (operación six-step).El bloque de generación PWM de MATLAB produce pulso con modulación bipolar, o sea entre dos niveles que son 1 y 0(Contreras 2005).. Técnicas avanzadas de modulación.. 1.4. El SPWM, que es el de uso más común, tiene desventajas (por ejemplo un voltaje bajo de salida de la fundamental). Las técnicas que ofrecen un mejor rendimiento son: Modulación trapezoidal. Modulación en escalera. Modulación escalonada. Modulación por inyección de armónicas..
(28) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 16. Modulación en delta. 1.4.1 Modulación trapezoidal. Las señales de excitación se generan al comparar una onda portadora triangular con una onda moduladora trapezoidal. La onda trapezoidal puede obtenerse a partir de una onda triangular si se limita su magnitud relaciona con el valor pico. (. ). mediante: (. Donde. , lo mismo se. (1.11). ). es el factor triangular, porque cuando. la forma de onda se. convierte en una onda triangular. El índice de modulación (. ⁄. ). ⁄. es:. Para. (1.12). El ángulo de la porción plana de la onda trapezoidal está dado por: ( Para los valores fijos de. (. ). y de. ). , puede modificarse. (1.13) , que varía con el. voltaje de salida, cambiando el factor triangular, .Este tipo de modulación aumenta hasta 1.05. el voltaje pico de salida de la fundamental, pero la salida. contiene armónicas de orden menor(Rashid 1995)..
(29) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 17. Figura 1.9 Modulación trapezoidal de ancho de pulso. 1.4.2 Modulación en escalera. La señal de modulación es una onda en escalera. La escalera no es una aproximación por muestreo de la onda senoidal. A fin de eliminar armónicas específicas, los niveles de los escalones se calculan. La razón de modulación de la frecuencia. y el número de escalones se escoge con el fin de obtener el. voltaje de salida con la calidad deseada(N. Mohan 1995). Este es un PWM optimizado y no se recomienda para casos con menos de 15 pulsos por ciclo. Para un alto voltaje de la fundamental de salida y un bajo factor de distorsión, el número óptimo de pulsos en un ciclo es 15 para dos niveles, 21 para tres niveles y 27 para cuatro niveles. Este tipo de control suministra un voltaje de salida de alta calidad, con un valor de la fundamental de hasta. (Rashid 1995).
(30) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 18. Figura 1.10 Modulación en escalera de ancho de pulso. 1.4.3 Modulación escalonada. La señal moduladora es una onda escalonada .La onda escalonada no es una aproximación por muestreo de la onda senoidal. Está dividida en intervalos específicos, digamos de. , cada uno controlado en forma individual a fin de. definir la magnitud de la componente fundamental y de eliminar armónicas específicas. Este tipo de control logra una distorsión baja, pero con una mayor amplitud de la fundamental en comparación con el control PWM normal(Rashid 1995)..
(31) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 19. Figura 1.11 Modulación escalonada. 1.4.4 Modulación por inyección de armónicas. La señal de modulaciones generada mediante la inyección de armónicas seleccionadas en la onda senoidal. Esto da como resultado una forma de onda de cresta aplanada, y reduce la sobremodulación. Suministra una mayor amplitud de la fundamental y una menor distorsión del voltaje de salida. La señal moduladora esta usualmente compuesta de: (1.14) La inyección de armónica de tercer orden no afectara la calidad del voltaje de salida, dado a que la salida de un inversor trifásico no contiene armónicas de múltiplo 3. Si solo de inyecta la tercera armónica. estará dado por: (1.15). La señal moduladora puede generarse a partir de segmentos de. ⁄ de una. onda senoidal. Esto es similar a inyectar armónicas múltiplo de 3 a una onda senoidal. El voltaje línea a línea es PWM senoidal y la amplitud de la componente.
(32) CAPÍTULO 1. MODULACIÓN EN INVERSORES. fundamental es aproximadamente 15% mayor. 20. que la de un PWM senoidal. normal. Dado que durante una tercera parte del período cada brazo del puente se desconecta, el calentamiento de los dispositivos conmutadores se reduce(Rashid 1995).. Figura 1.12 Modulación por inyección de armónicas. 1.4.5 Modulación en delta. En la modulación en delta, se deja que una onda triangular oscile dentro de una ventana definida. por encima y por debajo de la onda senoidal de referencia. .La función de conmutación del inversor , que es idéntica al voltaje de salida se genera a partir de los vértices de la onda triangular. ,. .También se conoce. como modulación por histéresis. Si se modifica la frecuencia de la onda moduladora manteniendo constante la pendiente de la onda triangular, el número de pulsos y de ancho de pulso de la onda modulada cambiará(Svenson 1999). El voltaje de salida de la fundamental puede ser hasta de amplitud pico. y de la frecuencia. y depende de la. del voltaje de referencia. La modulación en. delta puede controlar la relación entre voltaje y frecuencia, característica deseable en el control de motores de ca(Rashid 1995)..
(33) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 21. Figura 1.13 Modulación en delta. 1.5. Modulación vectorial de ancho de pulso (SV PWM).. Otra de las técnicas utilizadas se conoce como modulación vectorial de ancho de pulso (SVPWM). En la técnica SV PWM el puente inversor es manejado por ocho estados de conmutación. Se considera la mejor alternativa de modulación para inversores ya que maximiza el uso de la tensión DC, su contenido armónico es bajo y minimiza pérdidas por conmutación. Sin embargo, algunos autores indican que su única ventaja es su representación compleja(A. Kwasinski Sep / 2003). La técnica SV PWM se propone en 1982 por Pfaff, Weschta y Wick22 y se desarrolla en 1988 por Broeck, Skudelny y Stanke (H. W. Van Der Broeck 1988) gracias a los sistemas microprocesadores. La generación de voltaje con la técnica SV PWM se logra seleccionando adecuadamente y por un tiempo determinado los estados de los interruptores del puente inversor en cada período de conmutación. Su principal característica es que se sustituye todo el sistema trifásico por un sólo vector en el que la frecuencia queda reflejada en su velocidad de giro con el paso.
(34) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 22. del tiempo. Esto permite emplear dicho vector para estudiar tanto los regímenes estacionarios como dinámicos en dichos sistemas(Salvador Seguí Chilet marzo 2003). 1.5.1 Representación de las tensiones trifásicas en el espacio vectorial. Al considerar tres instantes de tiempo diferentes de la señal trifásica se obtienen los valores instantáneos de la magnitud de las tensiones en cada fase. se representan por un vector rotatorio « » de amplitud constante que gira en el plano complejo con frecuencia angular (. (frecuencia de la señal de salida).. ). (1.16). donde: ⁄. (1.17) ⁄. (1.18) (. ). (1.19). (. ⁄ ). ⁄. (1.20). (. ⁄ ). ⁄. (1.21). El coeficiente C puede seleccionarse entre √ ⁄ para la conservación de potencia o 3/2 para mantener la proyección ortogonal sobre la base (conservación de la magnitud de voltaje). Estos tres valores pueden sumarse y el vector suma resultante gira con velocidad angular en el sentido de las agujas del reloj..
(35) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 23. Figura 1.14 Vector Suma Instantáneo. Si las tensiones en cada fase fuesen sinusoidales, la suma en cada instante daría como resultado un fasor de magnitud constante: (1.22) De forma equivalente, cada uno de los vectores de voltaje se puede obtener de la transformación de Clarke,(Kwon. B. H. 1993) la cual permite pasar de un sistema trifásico a uno bifásico ortogonal, como se indica: [. ]. *. +[. ]. (1.23). Donde ⁄ [. ]. ⁄ [. √ ⁄. ⁄ √ ⁄ ][. ]. (1.24). Sin embargo las tensiones de fase a la salida del inversor no son sinusoidales sino una muestra de la tensión DC de alimentación del mismo. Al tener en cuenta que existen solo ocho posibilidades de conmutación de los dispositivos que conforman el inversor, se tiene ocho vectores suma resultantes. , ….. cuyo efecto de giro. se da cuando se cambia de un estado de conmutación al siguiente(Noreña 2008). Los vectores de conmutación son un arreglo de tres elementos correspondiente al estado (ON/OFF) que tenga cada uno de los dispositivos que se encuentran en la.
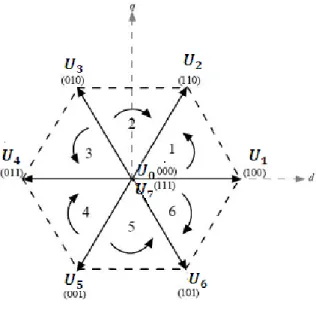
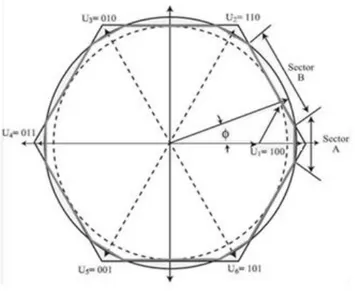
(36) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 24. parte superior del puente inversor, según la numeración de los. dispositivos. mostrados en la figura 1.15, corresponderían entonces a los dispositivos S1, S3 y S5. El estado de S4, S6 y S2 son los recíprocos instantáneos a los primeros, lo cual evita que la fuente de alimentación entre en corto circuito.. Figura 1.15 Numeración de los Elementos del Inversor. Al aplicar la transformación de Park a los voltajes de fase que aparecen por cada conmutación, se obtiene seis vectores con igual magnitud ((. ). ) pero. separados por un desfase de π/3, generando un hexágono dividido en 6 regiones cada una de 60º. Los vectores. y. están justo en el centro del hexágono y. representan los estados de conmutación en los cuales no hay tensión, pero que juegan un papel importante para definir las secuencias de conmutación con los cuales se dispararan los dispositivos(Martín 2003)..
(37) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 25. Figura 1.16 Sentido de Giro de las Conmutaciones en cada Área. El vector. se obtiene al hacer conducir los transistores S1, S4 y S6, con lo cual. la fase „a‟ se conecta a potencial positivo (+. ) y las fases „b‟ y „c‟ a negativo. (GND). Esto se representa mediante (+--), los restantes vectores de tensión se muestran en la Tabla 1.1. Las combinaciones (+++) y (---) no producen tensión resultante sobre la carga, por lo que se denominan vectores nulos. El hexágono que forman estos vectores en el plano complejo (αβ), representa la región máxima alcanzable usando un bus de DC a un voltaje. determinado (Figura 1.17).La. circunferencia dentro del hexágono corresponde a una operación sinusoidal lineal, y como resultado los voltajes en la carga son voltajes sinusoidales, el sentido de rotación del vector de voltaje determina la secuencia de fase en la salida del inversor..
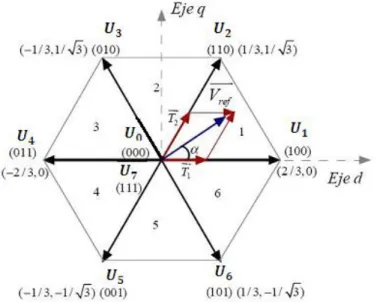
(38) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 26. Figura 1.17 Hexágono de tensiones o campo de estados.. Tabla 1.1 Valores de los vectores de voltaje que forman el hexágono de tensiones. La obtención una tensión deseada o tensión de referencia. , se logra por medio. del promedio de las tensiones de los vectores adyacentes que definen los límites de la zona donde está ubicada dicha tensión en el hexágono una vez ha sido convertida y ubicada en el espacio de Park(Salvador Seguí Chilet marzo 2003)..
(39) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 27. Figura 1.18 Generación del Voltaje de Referencia en el Área 1. La figura 1.18 ilustra la situación para un fasor de referencia ubicado en la zona 1 del hexágono. Obsérvese que la transición entre un vector y el siguiente (por ejemplo de. = (110) a. = (010)) implica la conmutación de solo una rama del. inversor, que se refleja en los vectores como la modificación de solo un bit por vez. Esta característica minimiza el número de conmutaciones por período y las perdidas en los dispositivos. La magnitud corresponde a una tensión de fase que se desea que el puente inversor entregue a una carga trifásica. Por tanto para su generación se necesita de la aplicación de las conmutaciones de los vectores. y. además de. y. en ciertos tiempos específicos y en determinada secuencia de tal manera que el promedio ponderado por el tiempo de aplicación de estas tensiones genere el vector referencia. 1.5.2 Forma de trabajo de la modulación vectorial. Para un voltaje determinado a la salida del inversor se tendrá un vector de magnitud. y ángulo. en el mapa de estados, el cual se desplazará por cada uno. de los sectores en que se divide el mapa. La generación del vector referencia. se. obtiene mediante la aplicación sucesiva de dos vectores adyacentes y un vector.
(40) CAPÍTULO 1. MODULACIÓN EN INVERSORES. nulo durante un período. 28. (Figura 1.19), en este intervalo se considera que el. vector de referencia se encuentra constante y estacionario. La expresión que relaciona los voltajes de fase-neutro con será el ángulo entre. y. se presenta en (1.25) .En general φ. , donde n será el sector activo. El máximo voltaje de. fase-neutro sinusoidal se obtiene con la modulación vectorial cuando. es igual a. 30° y está dado por (1.27), el cual corresponde a una tensión 15.5% mayor al máximo obtenible con técnicas PWM convencionales(Valentine 1999). (. ). donde. (1.26). En 1.25 y 1.26 voltaje y. ,. (1.25). es el tiempo durante el cual se aplica a la carga el vector de. el tiempo durante el cual se aplica a la carga el vector de voltaje. el tiempo durante el cual se aplica a la carga el vector de voltaje. , este. último corresponde al vector nulo con la combinación (+++) o (-- -).. Figura 1.19 (a) Representación de vector referencia, (flecha punteada), en el sector 1. (b) Descomposición del vector de referencia sobre los vectores. y. ..
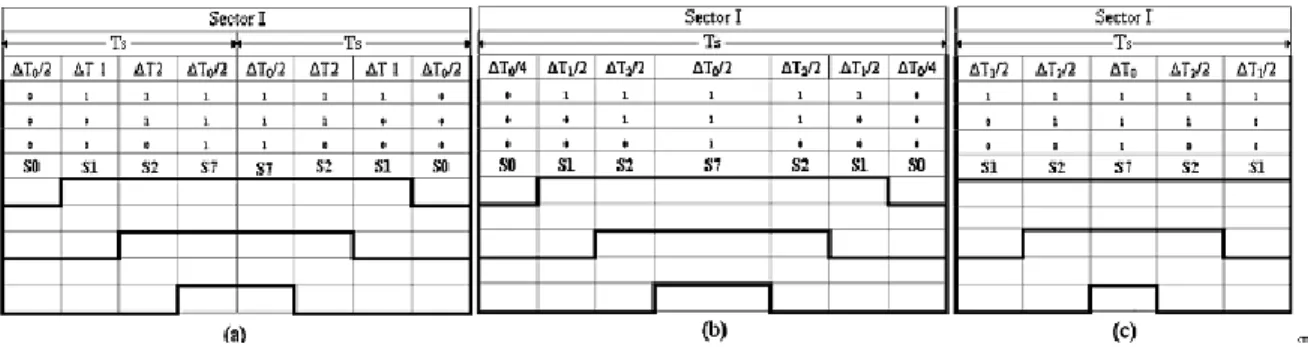
(41) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 29. (1.27). ⁄ √. (. ). ( ). (1.28) (1.29) (1.30). 1.5.3 Secuencias de conmutación. En la SV PWM es posible pasar de un vector a otro conmutando una rama del inversor; de este modo se minimizan el número de conmutaciones y las pérdidas en los semiconductores. La técnica SV PWM tiene variaciones basadas en el cambio del vector nulo y el orden de conmutación de los vectores activos, ofreciendo diferentes desempeños en conmutación, pérdidas por armónicos, rizo de corriente, etc. La secuencia seleccionada debe asegurar que los voltajes faseneutro tengan simetría de cuarto de onda para reducir las armónicas impares es sus espectros(Gonzalez-Longatt mayo 2004). La secuencia de conmutación más popular es la «Alternating zero vector sequence», prioriza la reducción en las pérdidas por conmutación seleccionando el vector nulo apropiado, las cuales se minimizan si el vector nulo es el último en cada intervalo y entre dos intervalos consecutivos se alternan U7 a U0. En la Figura 1.20 se muestra una secuencia de conmutación..
(42) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 30. Figura 1.20 Secuencia de conmutación en el modo Alt-Rev para minimizar conmutaciones en el puente inversor. y con vector nulo V7 sector 1. El estado de los interruptores se lee de arriba hacia abajo, S1 = 100 significa Sω1 en ON, SW2 y SW3 en OFF. Con el ánimo de aprovechar los módulos PWM integrados en sistemas procesadores y DSP‟s, se ha desarrollado la técnica «Symmetrical placement of zero vectors (SVPWM)», que consiste en dividir el ∆T0 por dos y así durante dos períodos de conmutación iniciar y terminar con un mismo valor de vector cero; sea este S7 o S0(H. W. Van Der Broeck 1988). Esta secuencia de conmutación se implementa logrando frecuencias de conmutación hasta 2KHz en procesadores 8086. En la ecuación 1.29 se muestra el cálculo de los respectivos tiempos y en la Figura 1.21a los patrones de pulsos de disparo para las «gates» de los interruptores del puente inversor. T0{S0} T0{S 7} (TS T1 T2 ) / 2. (1.31). La secuencia de conmutación «Symmetric Sequence» mantiene una secuencia de conmutación fija en cada sector. Su funcionamiento es muy similar a la anterior pero posee mayores pérdidas por conmutación. Cada período de conmutación inicia y finaliza con un vector cero y los vectores activos se intercambian. La Figura 1.21b muestra los patrones de disparo para los.
(43) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 31. «gates» del puente inversor, posee la misma cantidad de conmutaciones que la técnica «Alternating zero vector sequence», pero posee menos distorsión armónica dada la simetría de los pulsos de disparo de la señal de salida. Existe otra secuencia de conmutación para la modulación vectorial denominada «The bus campled sequence». En esta secuencia de modulación una rama del inversor se mantiene a un potencial positivo o negativo por unos períodos de conmutación, mientas las otras dos se conmutan. Como resultado de esto la frecuencia de conmutación en cada dispositivo se reduce a dos tercios de la que presenta la técnica. anterior. y. las. pérdidas. por. conmutación. en. los. dispositivos. semiconductores del puente inversor se reducen enormemente.. Figura 1.21 a) «Symmetrical placement of zero vectors (SVPWM)». b) «Symmetric Sequence», c) «The bus campled sequence». 1.5.4 Operación en sobre modulación y six-step. Cuando el índice de modulación «. » supera la unidad, el inversor trabaja en la. zona no lineal y la forma de onda de salida es no sinusoidal. En las técnicas de modulación escalares, la maximización del voltaje DC se obtiene con la inserción de señales ZSS.Otro enfoque sugiere el uso de un índice de modulación compensado presentado por Kaura y Blasco; este método se aplica a técnicas de modulación sinusoidales y cuando. =1 aplica un índice de modulación. compensado Micp como se muestra en (1.30) al inversor, logrando que el voltaje de salida Uo varíe de forma lineal en todo el rango de sobre modulación(Dobson 2007)..
(44) CAPÍTULO 1. MODULACIÓN EN INVERSORES. (. ). √(. ). 32 (1.32). En la técnica SV PWM, la sobremodulación se da cuando el vector de referencia sigue una trayectoria circular que amplía los límites del hexágono. Holtz presenta un método para calcular los tiempos de conmutación en sobremodulación y expone dos modos de operación. En estado estable, la trayectoria del vector de voltaje de referencia es circular, a medida que el índice de modulación es mayor a la unidad la circunferencia se extiende más allá del hexágono y el tiempo ∆T0 es negativo, la máxima tensión de salida será 0.907Udc cuando ∆T0 es cero, el cual se aumenta hasta 0.952Udc cambiando la magnitud de la referencia a medida que dicha referencia se acerca a cualquiera de los ocho vectores activos (Figura 1.22).. Figura 1.22 Límites del hexágono y nueva circunferencia trabajando en sobre modulación. En la sección limitada por el hexágono, sector B, solamente los dos vectores activos del sector de trabajo son conmutados alternadamente y el cálculo de ∆T1 y ∆T2 se da por (1.33 y 1.34). Las partes del círculo dentro del hexágono usan las mimas ecuaciones SV PWM para determinar los tiempos de estado ∆T0, ∆T1, y ∆T2. Cuando la tensión de salida alcanza valor de 0.952Udc, la tensión de salida se puede variar gradualmente desde 0.952Udc hasta el máximo correspondiente a.
(45) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 33. la operación Six Step; este proceso se conoce como Over-modulation Mode II y se basa en variar el recorrido del vector de referencia de voltaje en ángulos constantes iguales a kπ/6, donde k toma valores de 0, 1, ..., 5. El vector de referencia se mantiene en una posición determinada por un sexto del período de la fundamental(Marcos 1997). √. (1.33). √. (1.34) Aunque la sobremodulación permite más utilización del voltaje de entrada DC, da como resultado voltajes de salida no sinusoidales con alto grado de distorsión, en especial a baja frecuencia de salida, y no linealidad entre la tensión de salida y el índice de modulación. Otros autores como D-C. Lee y G- M. Lee agregan mejoras en la linealidad de la respuesta del voltaje de salida en función del índice de modulación, así como también reducción en el contenido armónico de la misma. 1.6 Comparación de algunas PWM y SV PWM. Respecto a la reducción de las pérdidas por conmutación: en PWM el único método para lograr esto es disminuyendo la frecuencia de la portadora mientras que en la modulación vectorial se presenta la posibilidad de usar un solo vector nulo en la distribución de los ciclos de trabajo para cada muestra del vector(Vas 1990). Tipo de. Voltaje de fase. Voltaje de línea. Forma de. Modulación. normalizado. normalizado. onda de salida. PWM. 0.5. 0.5*√ =0.666. Sinusoidal. 1/√ =0.57735. 1. Sinusoidal. sinusoidal PWM a 60.
(46) CAPÍTULO 1. MODULACIÓN EN INVERSORES. PWM con 3er. 34. 1/√ =0.57735. 1. Sinusoidal. 1/√ =0.57735. 1. Sinusoidal. armónico SV PWM. Tabla 1.2 Resumen de distintos esquemas de simulación para inversores trifásicos con m=1. La SV PWM. tiene las ventajas de menos armónicas y mayor índice de. modulación, además de la posibilidad de implementación digital completa mediante un microprocesador en un solo circuito integrado y ofrece mejoras en la utilización del bus de CD(K. Vinoth Kumar Julio 2010). Por la flexibilidad de su manipulación, la SVPWM tiene cada vez mayores aplicaciones en los convertidores de potencia y en la excitación de motores. Además presenta un 15% de incremento en el voltaje máximo comparado con la modulación PWM convencional. La PWM tiene como principal ventaja la sencillez en su implementación, pero como contrapartida, no se adaptan bien a la respuesta dinámica en cargas no lineales y poseen elevadas pérdidas por conmutación que se producen cuando se requiere una distorsión armónica total (THD) de bajo valor, debido a que el número de conmutaciones debe ser elevado. La modulación sinusoidal es pobre en la. utilización de la tensión continua. disponible, la cual no supera el 78,5% de la tensión fundamental de una onda cuadrada (inversor trabajando en modo six-step)(Tonelli 2004).. 1.7 Consideraciones finales. En este capítulo se expuso la fundamentación teórica y matemática que soporta la explicación de los fenómenos concernientes a la modulación PWM con sus variantes y la modulación PWM vectorial para ayudar a comprender mejor su.
(47) CAPÍTULO 1. MODULACIÓN EN INVERSORES. 35. comportamiento simulado con la ayuda del Simulink/MATLAB. Así como una comparación entre ambas técnicas de ancho de pulso..
(48) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 36. DE MODULACIÓN. CAPÍTULO 2. Implementación computacional en Simulink/MATLAB de técnicas de modulación.. Las técnicas de modulación PWM simuladas de las que se tienen conocimiento en la facultad de Ingeniería Eléctrica de la UCLV estaban implementadas para obtener los pulsos de disparo y comparar las formas de onda, no se veía la aplicación de estas técnicas en la práctica, en este caso obtendremos la simulación de la modulación vectorial aplicando sus pulsos de disparo a un motor de inducción para poder analizar su comportamiento. En este capítulo se muestra las simulaciones de las técnicas de PWM estudiadas en la facultad de Ingeniería Eléctrica de la UCLV con la ayuda del Simulink/MATLAB además se incluye la simulación de la modulación vectorial de ancho de pulso y la descripción de los bloques utilizados más importantes durante la simulación. 2.1. Estructura general del proyecto.. Este proyecto consta de varios. ficheros confeccionados en el Simulink de. MATLAB (.mdl), los cuales representan los diagramas matemáticos de algunas de las distintas técnicas de modulación confeccionados con los diferentes bloques del Simulink. Para realizar el análisis del proyecto confeccionado, primeramente debe ejecutarse el fichero (.mdl) y luego poner en marcha la simulación de este fichero con los parámetros de simulación adecuados, por último, revisar los resultados de.
(49) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 37. DE MODULACIÓN. los diferentes gráficos para poder percibir el comportamiento de la técnica de modulación vectorial de ancho de pulso. 2.2. Simulación de algunas técnicas de modulación.. Las técnicas de PWM son utilizadas para el control del voltaje de salida de los inversores. Con el empleo de estas, se obtienen formas de onda con menor contenido de armónicos, lo cual mejora la calidad de la onda de salida del inversor. Además el empleo de estas técnicas permite realizar el control del voltaje de los inversores dentro del propio esquema eliminando la necesidad del empleo de rectificadores controlados para regular el voltaje. De estas técnicas ya se tiene conocimiento de su comportamiento simulado con la herramienta Simulink de MATLAB en el pregrado y en el posgrado mediante los laboratorios impartidos en la asignatura Electrónica de Potencia II. A continuación se mostrara la simulación de algunas de estas técnicas. 2.2.1 Modulación senoidal de ancho de pulso. Antes de ser presentado los elementos constitutivos de la modulación senoidal de ancho de pulso, se muestra el diagrama completo que se utiliza en este trabajo. Luego se describen brevemente cada componente del bloque de la SPWM implementado en Simulink.. Figura 2.1 Diagrama completo de la SPWM..
(50) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 38. DE MODULACIÓN. Sine Wave: es el encargado de generar una onda senoidal. Gen.Ond.TS2: genera la onda triangular. Sum: añade o sustrae las señales de entrada. Swith: genera pulsos correspondientes al área bajo la onda senoidal entre los puntos medios adyacentes de los periodos inactivos de la señal de excitación. Mux: multiplexa las señales vectoriales o escalares.. 2.2.2 Modulación Delta.. Figura 2.2 Diagrama completo de la modulación delta.. 2.2.3 Modulación por inyección de armónicos..
(51) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS DE MODULACIÓN. Figura 2.3 Diagrama completo de la modulación por Inyección de armónicos.. 2.2.4 Modulación Trapezoidal.. Figura 2.4 Diagrama completo de la modulación trapezoidal.. 39.
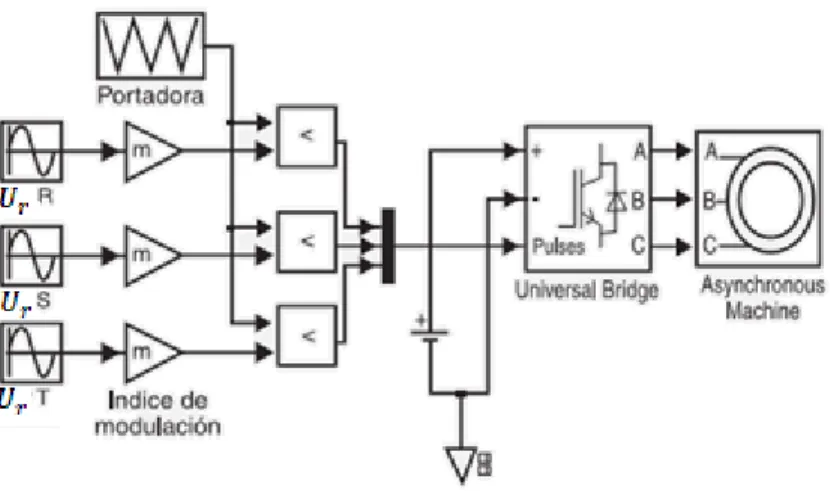
(52) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 40. DE MODULACIÓN. Saturation: limita la señal de entrada para los valores superiores e inferiores de saturación. 2.3. Modelo en estudio.. A continuación se muestra el modelo en Simulink/MATLAB que se utilizó para el estudio de la SV PWM. Posteriormente se describirán los bloques principales de la SV PWM.. Figura 2.5 Diagrama completo de la SV PWM..
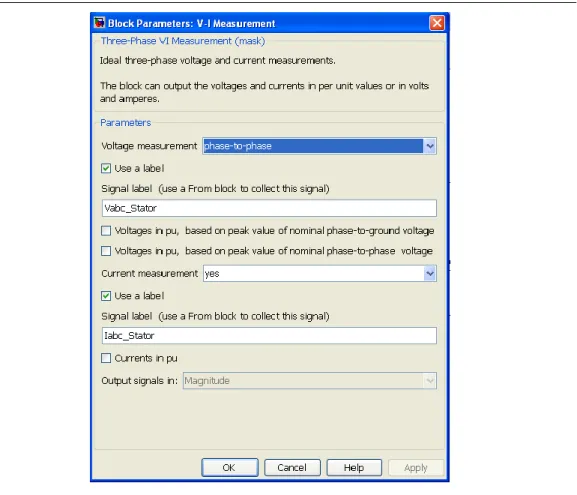
(53) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 41. DE MODULACIÓN. 2.3.1 Descripción de los Bloques importantes del SimPowerSystems. 2.3.1.1 Bloque “Three-Phase V-I Measurement”. El bloque de V-I Measurement de tres fases se usa para medir voltajes de tres fases instantáneos y corrientes en un circuito. Estando conectado en la serie con elementos trifásicos, retorna los tres voltajes fase-neutro o fase-fase y las tres corrientes de línea. El bloque medidor trifásico de voltaje y corriente puede entregar los valores en por unidad [pu] o en volts y amperes respectivamente. En el caso de elegir valores en [pu] el bloque realiza las siguientes conversiones:. (. (. ). ). (2.1). ⁄ (. (. ). (. √ ). ) ⁄ (. Donde. ⁄ √. (2.2) ⁄ √. √ ). es el voltaje base de la línea en volts RMS y Pbase es la potencia. trifásica en volts-amperes. Ambos valores deben ser especificados en el menú de parámetros del bloque. La figura 2.6 muestra el bloque que lo representa:. Figura 2.6 Bloque Three-Phase V-I Measurement. La Figura 2.7 muestra el cuadro de diálogo de este elemento:.
(54) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 42. DE MODULACIÓN. Figura 2.7 Cuadro de diálogo de Three-Phase V-I Measurement.. Voltage Measurement (medición de voltajes): Indica si la medición de voltaje será fase-fase o fase-neutro. Use a label: Indica si se utilizará una etiqueta para identificar el valor medido. Signal label: Este es el nombre de la etiqueta del valor medido. Voltages in pu, based on peak value of nominal phase-to-ground voltage: seleccionar para poner el valor del voltaje de fase a tierra en pu. Voltages in pu, based on peak value of nominal phase-to-phase voltage: seleccionar para poner el valor del voltaje de fase a fase en pu. Current Measurement (medición de corriente): Indica si la medición de corriente será necesaria..
(55) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 43. DE MODULACIÓN. Use a label: Indica si se utilizará una etiqueta para identificar el valor medido. Signal label: Este es el nombre de la etiqueta del valor medido. Currents in pu: Indica si se utilizará una medición en amperes o en por unidad. Output signal (señal de salida): Indica cómo se establecerá la señal de salida. . Póngase Complex para devolver las corrientes y voltajes medidos como los valores complejos. Las salidas son señales complejas.. . Póngase para Real-Imag devolver las partes reales e imaginarias de las corrientes y voltajes medidos.. . Póngase para Magnitude-Angle para devolver las magnitudes y ángulos de las corrientes y voltajes medidos.. . Póngase Magnitude para devolver las magnitudes de las corrientes y voltajes medidos. La salida es un valor del escalar.. La Figura 2.8 muestra el subsistema que integra este elemento:. Figura 2.8 Subsistema del Bloque Three-Phase V-I Measurement. 2.3.1.2 Bloque “Discrete PLL-Driven Fundamental Value”. Este bloque discreto mide el valor fundamental de la señal de entrada (port In) sobre un ciclo de una frecuencia fundamental especificada (port Freq). La primera.
(56) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 44. DE MODULACIÓN. y las segunda salidas devuelven respectivamente la magnitud y la fase (en los grados relativo a la fase de lazo de enganche de fase) de lo fundamental. Para el primer ciclo de simulación, las salidas son constantes sostenidas para los valores especificados por el parámetro "Initial input”. La figura 2.9 muestra el bloque que lo representa:. Figura 2.9 Bloque “Discrete PLL-Driven Fundamental Value”. La Figura 2.10 muestra el cuadro de diálogo de este elemento:.
(57) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 45. DE MODULACIÓN. Figura 2.10 Cuadro de diálogo de “Discrete PLL-Driven Fundamental Value”. Initial frequency (Hz): frecuencia inicial en Hertz. Initial input [Mag, Phase-relative-to-PLL (degrees)]: para especificar magnitud y fase inicial en grados de la señal de entrada. Sample time (tiempo de muestra): Especifica el tiempo de muestra del bloque en segundos. Póngase a 0 para implementar un bloque continuo. La Figura 2.11 muestra el subsistema que integra este elemento:.
(58) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS DE MODULACIÓN. Figura 2.11 Subsistema de “Discrete PLL-Driven Fundamental Value” 2.3.1.3 Bloque “Mosfet inverter”. La figura 2.12 muestra el bloque que lo representa:. Figura 2.12 Bloque “Mosfet inverter”.. La Figura 2.13 muestra el cuadro de diálogo de este elemento:. 46.
(59) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 47. DE MODULACIÓN. Figura 2.13 Cuadro de diálogo de “Mosfet inverter”.. Number of bridge arms (número de dispositivos a conmutar): . Póngase a 1 o 2 obtener un convertidor monofásico (dos o cuatro dispositivos conmutativos).. . Póngase para 3 conectar un convertidor de tres fases en puente Graetz. La configuración (seis dispositivos conmutativos).. Snubber resistance Rs: La resistencia del amortiguador, en los ohms. Coloque el parámetro Snubber resistance Rs a inf para eliminar los amortiguadores del modelo. Snubber capacitance Cs: La capacitancia del amortiguador, en los faradios (F). Establezca el parámetro Snubber capacitance Cs para 0 para eliminar los amortiguadores, o para inf para obtener un amortiguador resistente..
(60) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 48. DE MODULACIÓN. Power electronic device: Seleccione el tipo de dispositivo electrónico para usar en el puente. Ron: La resistencia interna del dispositivo seleccionado, en los ohms. La Figura 2.14 muestra el subsistema que integra este elemento:. Figura 2.14 Subsistema del bloque “Mosfet inverter”. 2.3.1.4 Bloque “PLL”. Este sistema de PLL (el lazo de enganche de fase) puede usarse para sincronizar en una frecuencia variable la señal sinusoidal. Es utilizado para separar el ángulo y la frecuencia de la fundamental. Entrega como salida la frecuencia medida en [Hz], el valor del producto wt variando entre 0 y 2π sincronizado con los cruces por cero de la fase A y un vector indicando el seno y coseno de wt. La figura 2.15 muestra el bloque que lo representa:. Figura 2.15 Bloque “PLL”..
(61) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 49. DE MODULACIÓN. La Figura 2.16 muestra el cuadro de diálogo de este elemento:. Figura 2.16 Cuadro de diálogo de “PLL”. Initial inputs [Phase (degrees), Frequency (Hz)]: Indica los valores iniciales de Fase y Frecuencia para el oscilador enclavado por fase. La fase se indica en grados [°], mientras que la frecuencia en Hertz [Hz]. Regulator gains [Kp, Ki]: Especifica las ganancias proporcionales e integrales del controlador interno PID. Sample time: Especifica el tiempo de muestra del bloque en segundos. Póngase a 0 para implementar un bloque continuo. La Figura 2.17 muestra el subsistema que integra este elemento:.
(62) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 50. DE MODULACIÓN. Figura 2.17 Subsistema del bloque “PLL” 2.3.1.5. Bloque “Ideal Switch”.. Es un interruptor controlado por una señal de pulso en paralelo con un circuito RC en serie amortiguador. En el estado del modelo de conmutador tiene una resistencia interna (Ron). En estado apagado esta resistencia interna es infinita. La resistencia interna debe ser mayor que cero. El modelo de interruptor está en estado de encendido cuando la señal de puerta (g) se establece en 1. La figura 2.18 se muestra el bloque que lo representa:. Figura 2.18 Ideal Switch. La Figura 2.19 muestra el cuadro de diálogo de este elemento:.
(63) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 51. DE MODULACIÓN. Figura 2.19 Cuadro de diálogo de Ideal Switch. Internal resistance Ron: La resistencia interna del dispositivo de interruptor, en ohmios (Ω). El parámetro Ron resistencia interna no se puede establecer en 0. Initial state: El estado inicial del bloque Ideal conmutador que se toma en cuenta en el cálculo de estado estacionario. Snubber resistance Rs: Indica la resistencia de amortiguación en ohms. Colocar este parámetro en inf para eliminar la amortiguación del modelo. Snubber capacitance Cs: La capacitancia del amortiguador. en faradios (F).. Ajuste el parámetro Cs a 0 para eliminar el amortiguador, o inf para obtener un amortiguador resistente. La Figura 2.20 muestra el subsistema que integra este elemento:.
(64) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 52. DE MODULACIÓN. Figura 2.20 Subsistema de Ideal Switch. La Figura 2.21 muestra el subsistema que integra el bloque Model Discrete:. Figura 2.21 bloque Model Discrete. El bloque Ideal Switch también contiene un circuito amortiguador Rs-Cs serie que se puede conectar en paralelo con el conmutador ideal (entre los nodos 1 y 2). 2.3.1.6 Bloque “3 HP, 220 V, 60 Hz Asynchronous Machine”. Implementa una máquina asíncrona trifásica (rotor bobinado o jaula de ardilla) modelada en un marco de referencia dq seleccionable (rotor, estator, o sincrónica). Devanados del estator y el rotor están conectados en estrella a un punto neutro interna. La figura 2.22 muestra el bloque que lo representa:.
(65) CAPÍTULO 2. IMPLEMENTACIÓN COMPUTACIONAL EN SIMULINK/MATLAB DE TÉCNICAS. 53. DE MODULACIÓN. Figura 2.22 Bloque “PLL”. La Figura 2.23 muestra el cuadro de diálogo de este elemento:. Figura 2.23 Cuadro de diálogo de “PLL”. Configuration: Present model (modelo presente): aquí se especifican las condiciones que desea para el motor por ejemplo 5HP 460V 60Hz 1750RPM. En caso de no querer utilizar ninguno de las opciones de valores que allí vienen poner no y especificar entonces en “parameters”..
Figure
+7



Documento similar