Extensión al módulo de análisis de redes de gvSIG con la implementación de técnicas para resolver el problema de enrutamiento de vehículos
91
0
0
Texto completo
(2) Dictamen.. Hago constar que el presente trabajo fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de los estudios de la especialidad de Ciencia de la Computación, autorizando a que el mismo sea utilizado por la institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos ni publicado sin la autorización de la Universidad.. Los abajo firmantes, certificamos que el presente trabajo ha sido realizado según acuerdos de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del tutor. Firma del jefe del Laboratorio. I.
(3) PENSAMIENTO. …añade el hombre conocimientos a conocimientos: nunca el saber es bastante. Si tanto es uno más hombre cuanto más sabe, el más noble empleo será aprender. Baltasar Gracián. II.
(4) DEDICATORIA. A quien guía mis pasos para continuar mi destino. A quien de la espiga es la flor, que yo nunca cambiaria, a mi razón de ser que con tanto sacrificio, devoción, dicha alegría y placer me dio la vida. A ti madre querida. III.
(5) IV.
(6) RESUMEN: La implementación de técnicas para la resolución de los problemas de enrutamiento de vehículos en los sistemas de información geográfica es una alternativa novedosa para la resolución de problemas de optimización y gestión de recursos. Equipar a los sistemas de información geográfica de estas herramientas contribuye a una mejor organización empresarial. En esta investigación se presenta una ampliación al módulo de análisis de redes de gvSIG con la implementación de una metaheurística para resolver la variante de enrutamientos de vehículos con capacidad limitada (CVRP). En el trabajo se presentan los principales aspectos de los problemas de enrutamiento de vehículos y en específico de la variante implementada, además se presentan aspectos referidos a cada una de las técnicas de solución de estos problemas y en específico de las metaheurísticas que se utilizan para resolver cada una de las variantes del VRP. Los principales aspectos del diseño e implementación de la herramienta son explicados, quedando propuesta una metodología para la incorporación de nuevas variantes o extensiones al módulo de análisis de redes de gvSIG. Además se presenta un manual de usuario que muestra el uso del sistema y los resultados obtenidos tras la aplicación de la herramienta en un caso de estudio.. V.
(7) ABSTRACT: The implementation of techniques to solve the Vehicle Routing problems in Geographics information systems is a new alternative to solve optimization and resources management problems. To equip Geographics information systems with these tools contribute to a best managerial organization. Through this investigation, an amplification to the module of networks analysis of gvSIG is presented along with the implementation of a metaheuristical method used to give solution to each variant of VRP. The main aspects in designing and implementation of this tool are explained thus leading to the proposal of a methodology so as to incorporate new variants or extensions to the module of networks analysis of gvSIG. Moreover a user’s manual was elaborated to show the use of the system and the results after applying the tool in a study case.. VI.
(8) ÍNDICE. Tabla de contenido INTRODUCCIÓN ......................................................................................................... 1 CAPÍTULO 1 1.1. REDES Y SISTEMAS DE INFORMACIÓN GEOGRÁFICA ............... 9. Teoría de redes ............................................................................................... 9. 1.1.1. Componentes de una red ......................................................................... 9. 1.1.2. Tipos de redes en los sistemas de información geográfica .................... 11. 1.1.3. Redes de servicio ................................................................................... 12. 1.1.4. Redes de transporte ............................................................................... 13. 1.2. Operaciones sobre redes de transporte ........................................................ 13. 1.2.1. Camino mínimo ...................................................................................... 14. 1.2.2. Facilidad más cercana............................................................................ 15. 1.2.3. Área de servicio ...................................................................................... 17. 1.2.4. Matriz de costos ..................................................................................... 20. 1.2.5. Localización-Asignación ......................................................................... 21. 1.2.6. Enrutamiento de vehículos ..................................................................... 24. 1.3. Metaheurísticas ............................................................................................. 31. 1.3.1. Recorrido simulado................................................................................. 32. 1.3.2. Algoritmos genéticos .............................................................................. 34. 1.3.3. Búsqueda tabú ....................................................................................... 38. 1.3.4. Colonias de hormigas ............................................................................. 39. 1.3.5. GRASP ................................................................................................... 41. 1.4. Sistemas de información geográfica ............................................................. 43. 1.4.1. ArcGIS .................................................................................................... 44. 1.4.2. GvSIG ..................................................................................................... 44. VII.
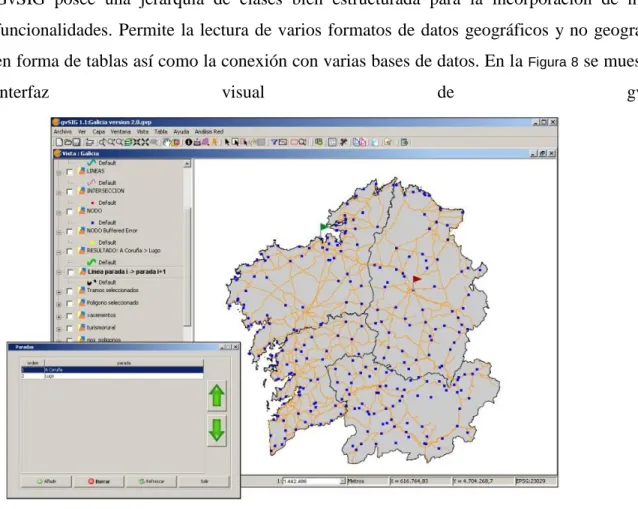
(9) 1.4.3. Análisis de redes mediante sistemas de información geográfica ........... 46. Conclusiones parciales ........................................................................................... 47 CAPÍTULO 2 2.1. DISEÑO E IMPLEMENTACIÓN DE LA EXTENSIÓN ...................... 49. Selección de la variante y la técnica ............................................................. 49. 2.1.1. Selección de la variante del VRP para la extensión ............................... 49. 2.1.2. Selección del algoritmo a utilizar en la extensión ................................... 50. 2.2. Diseño de la extensión .................................................................................. 51. 2.2.1. Diagrama de casos de uso ..................................................................... 51. 2.2.2. Diagrama de clases ................................................................................ 52. 2.3. Implementación ............................................................................................. 54. 2.3.1. Selección de las tecnologías .................................................................. 55. 2.3.2. Consideraciones sobre la variante CVRP .............................................. 56. 2.3.3. Secuencia de pasos para la adición de la variante CVRP al módulo de. análisis de redes de gvSIG ................................................................................. 57 Conclusiones parciales ........................................................................................... 59 CAPÍTULO 3. PRESENTACIÓN DE LOS RESULTADOS ..................................... 61. 3.1. Manual de usuario ........................................................................................ 61. 3.2. Análisis de los resultados............................................................................. 65. 3.2.1. Caso de estudio: Análisis de un problema de enrutamientos de vehículos. con capacidad limitada........................................................................................ 66 Conclusiones parciales ........................................................................................... 71 CONCLUSIONES ...................................................................................................... 73 RECOMENDACIONES .............................................................................................. 74 REFERENCIAS BIBLIOGRÁFICAS ........................................................................... 75.
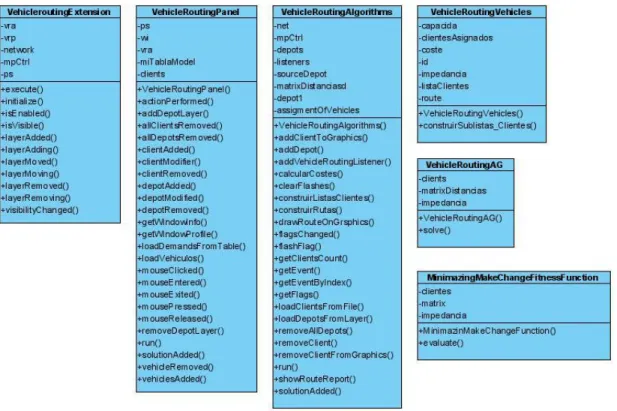
(10) LISTA DE FIGURAS FIGURA 1 EN EL EJEMPLO SE ELIGE COMO IMPEDANCIA LA DISTANCIA. POR CONSIGUIENTE, LA LONGITUD DE LA RUTA MÁS CORTA ES 4,4 MILLAS, Y SE TARDA EN RECORRER 9 MINUTOS.......................................................................................................... 15. FIGURA 2 POR EJEMPLO, PODRÍA CONFIGURAR UN PROBLEMA DE INSTALACIÓN MÁS CERCANA PARA BUSCAR HOSPITALES A MENOS DE 15 MINUTOS DE TIEMPO DE RECORRIDO DESDE LA UBICACIÓN DE UN ACCIDENTE............................................................. 17 FIGURA 3 POR EJEMPLO, EL ÁREA DE SERVICIO DE 10 MINUTOS PARA UNA INSTALACIÓN INCLUYE TODAS LAS CALLES A LAS QUE SE PUEDE LLEGAR DESDE ESA INSTALACIÓN EN UN PLAZO DE DIEZ MINUTOS, REPRESENTADA AQUÍ POR UN POLÍGONO. ......................... 20. FIGURA 4 MATRIZ DE COSTOS ENTRE TODOS LOS PUNTOS DE LA RED SEÑALANDO EL CASO ESPECÍFICO DEL RECORRIDO ENTRE MILWAUKEE Y DETROIT. ...................................................................................................................................... 21 FIGURA 5 LOCALIZACIÓN – ASIGNACIÓN........................................................................................................................... 24 FIGURA 6 RUTAS CALCULADAS PARA LA ENTREGA DE LOS PRODUCTOS EN EL PLANTEAMIENTO DEL PROBLEMA ANTERIOR .................. 25 FIGURA 7 DIAGRAMA DE LAS VARIANTES DEL PROBLEMA DE RUTEO DE VEHÍCULOS. ................................................................... 28 FIGURA 8 INTERFAZ VISUAL DEL GVSIG ............................................................................................................................ 45 FIGURA 9 DIAGRAMA DE CASO DE USO ............................................................................................................................. 51 FIGURA 10 ATRIBUTOS Y MÉTODOS DE LAS CLASES IMPLEMENTADAS EN LA EXTENSIÓN .............................................................. 53 FIGURA 11 RELACIONES ENTRE LAS CLASES IMPLEMENTADAS ................................................................................................ 53 FIGURA 12 RELACIONES DE LA CLASE VEHICLEROUTINGPANEL CON CLASES FUERA DEL PAQUETE ................................................. 54 FIGURA 13 RELACIONES DE LA CLASE VEHICLEROUTINGALGORITHMS ..................................................................................... 54 FIGURA 14 CREACIÓN DE UNA NUEVA VISTA...................................................................................................................... 61 FIGURA 15 SELECCIÓN DE LAS CAPAS ............................................................................................................................... 62 FIGURA 16 GENERACIÓN O CARGA DE LA RED Y SELECCIÓN DE LA OPERACIÓN .......................................................................... 63 FIGURA 17 INTRODUCCIÓN DE LOS DATOS NECESARIOS PARA LA OPERACIÓN. .......................................................................... 64 FIGURA 18 CALCULO, INSTRUCCIONES Y DIBUJADO DE LAS RUTAS .......................................................................................... 65 FIGURA 19 UBICACIÓN DE LOS CLIENTES (PUNTOS ROJOS) SOBRE LA RED. ............................................................................... 67 FIGURA 20 UBICACIÓN DEL DEPÓSITO EN LA RED................................................................................................................ 68. LISTA DE TABLAS TABLA 1 RELACIÓN DE LOS CLIENTES Y CADA UNA DE SUS DEMANDAS .............................................................................. 67 TABLA 2 RELACIÓN DE VEHÍCULOS Y SUS DEMANDAS. .......................................................................................................... 68 TABLA 3 RUTAS CALCULADAS PARA LOS VEHÍCULOS. ........................................................................................................... 70.
(11)
(12) “INTRODUCCIÓN”. INTRODUCCIÓN Los Sistemas de Información Geográfica (SIG o GIS por sus siglas en inglés) datan de varias décadas y se han posicionado como una tecnología básica, imprescindible y poderosa para capturar, almacenar, manipular, analizar, modelar y presentar datos espacialmente referenciados. Se trata por lo tanto, de una categoría dentro de los sistemas de información que se especializa en manejar datos espaciales, con las particularidades y requerimientos que ello conlleva. Según (Bolstad, 2005) un SIG es una integración organizada de hardware, software y datos geográficos diseñado para capturar, almacenar, manipular, analizar y desplegar en todas sus formas la información geográficamente referenciada, con el fin de resolver problemas complejos de planificación y gestión. En un sentido más genérico, los SIG son herramientas que permiten a los usuarios crear consultas interactivas, analizar la información espacial, editar datos, mapas y presentar los resultados de todas estas operaciones. Lo específico de un SIG reside en rasgos tales como su capacidad para almacenar grandes masas de información geo referenciada (operación de obtener y asignar coordenadas geográficas a una información que carece de ella), o su potencia para el análisis de la misma, que le hacen idóneo para abordar problemas de planificación y gestión, es decir para la toma de decisiones (Baker and Ayechew, 2003) (Moreno Jiménez, 2006). Estos sistemas permiten separar la información en diferentes capas temáticas y las almacenan independientemente, permitiendo trabajar con ellas de manera rápida y sencilla, facilitando la posibilidad de relacionar la información existente a través de la topología de los objetos, con el fin de generar otra nueva capa que no podríamos obtener de otra forma. Antes de la disponibilidad de la tecnología SIG, la forma en que se tomaban decisiones no siempre era la más adecuada. Se confiaba en mapas tradicionales y tablas estadísticas impresas y los registros se mantenían guardados en departamentos o en sectores aislados de la organización, por lo cual se generaba una inevitable pérdida de tiempo, duplicación de esfuerzos y reducción en la eficiencia de las prestaciones. Más allá de todo esto, se sumaba la dificultad de mantener actualizadas las tablas, los mapas y la cartografía. Esto llevaba a que muchos análisis no se pudieran realizar, ya que ni siquiera con los mejores mapas, tablas o cartas era posible la evaluación de una buena decisión.. 1.
(13) “INTRODUCCIÓN”. Las herramientas provistas por los SIG para el análisis de distintos modelos permite la solución de distintos tipos de problemas y particularmente la solución de grandes problemas de planificación y gestión de recursos, en particular los problemas de ruteo de vehículos o de distribución física de mercancías desde almacenes a clientes, los cuales aparecen en la literatura científica como Vehicle Routing Problems, más comúnmente como (VRP por sus siglas en inglés). También se puede encontrar, aunque en menor medida, referencias como Vehicle Scheduling Problems. En términos generales, un problema de rutas de vehículos consiste en determinar las rutas de un conjunto (o flota) de vehículos que deben iniciar un recorrido (y finalizarlo) en los almacenes (o depósitos) para atender la demanda de servicio de un conjunto disperso de clientes sobre una red. En la literatura, algunos autores han intentado clasificar y simplificar la gran variedad de posibles problemas, como por ejemplo los criterios propuestos por(Bodin and Golden, 1981) y (Desrochers et al., 1990); que intentan reflejar y ordenar las principales características en aspectos como: el almacén, la flota, la demanda, el servicio y el objetivo a alcanzar. Esta clasificación de los problemas, ha facilitado tanto el desarrollo de modelos matemáticos y estrategias de resolución, como la toma de decisiones por parte de las empresas. Uno de los primeros estudios que trataron el problema de ruteo de vehículos se remonta al año 1959, en este trabajo Dantzig y Ramser (Dantzig and Ramser, 1959) tratan un problema de despacho con camiones, que surge como una generalización del problema clásico del agente viajero (TSP) en el que un vendedor tiene que visitar una serie de clientes una sola vez, para luego volver al lugar de partida, construyendo un camino hamiltoneano sobre el grafo constituido por los clientes (vértices) y los caminos posibles entre un cliente y otro (aristas). El VRP tiene por objetivo encontrar las rutas que recorrerán cada uno de los vehículos (ubicados en un depósito) de manera que se satisfagan los requerimientos de los clientes, las restricciones operativas y se minimice el costo total de transporte. En la historia reciente del VRP ha existido una evolución constante en la calidad de las metodologías resolutivas utilizadas en este problema, pertenecientes tanto al campo de investigación exacto como al heurístico. De todas formas, dada la dificultad del problema, ningún método exacto conocido es capaz de encontrar el óptimo para instancias que contengan más de 100 clientes en un tiempo de ejecución razonable (Golden et al., 1998).. 2.
(14) “INTRODUCCIÓN”. Una recopilación de técnicas exactas de solución existentes para los problemas de ruteo de vehículos puede encontrarse en (Laporte, 1992). No obstante, los de gran dimensión resultan imposibles de solucionar en tiempo polinomial, por lo que el VRP es un problema NPcomplejo (Machado et al., 2002) y (Olivera, 2004), donde no es posible alcanzar una solución óptima y dependiendo de las características especiales de clientes, locaciones y producto/servicio, requiere la elaboración de una metodología de solución específica con la cual se aproxime lo mejor posible al óptimo. Debido a estas razones y a la relevancia práctica del VRP se han propuestos varias soluciones a este problema haciendo uso de heurísticas y metaheurísticas. Algunos ejemplos incluyen Búsqueda Tabú (Cordeau et al., 1997), Colonias de Hormigas (Bell and McMullen, 2004), Algoritmos Evolutivos (Baker and Ayechew, 2003), (Xu et al., 2005) entre otras. Para el modelado, resolución y análisis de este tipo de problemas, es necesario gestionar una enorme cantidad de información: datos sobre las características de la flota de vehículos, los planes de ruta, los cargamentos, depósitos y retiros, información geográfica, las restricciones, la función objetivo, etcétera. Además este tipo de problemas son dinámicos y cambian en el tiempo, sus datos deben de estar soportados por una estructura flexible, capaz no sólo de atender tal cantidad de información según los actuales requerimientos de las empresas, sino también los futuros del sistema logístico (ampliación del número de clientes, de la flota de vehículos, nuevas restricciones, etcétera). Los problemas VRP son complejos de modelar y de resolver, ya que pertenecen al tipo de problemas NP-complejo, quien gestiona y decide en el sistema logístico, demanda una herramienta que le haga transparente el proceso de modelado y optimización (o cálculo de soluciones factibles), pero que en cambio le permita explorar con detalle la bondad de las soluciones ayudándole en su toma de decisiones y le facilite la gestión (órdenes de trabajo, control, etcétera). Por lo que a nivel mundial la gran mayoría de los desarrolladores de sistemas de información geográfica han dedicado grandes esfuerzos a la implementación de técnicas para el análisis de ruteo de vehículos y así apoyar a la toma de decisiones en la logística de las empresas y la optimización de recursos. Planteamiento del problema. 3.
(15) “INTRODUCCIÓN”. La optimización en los cálculos de ruteo de vehículos son de gran importancia para la economía actual del país pues permite optimizar el uso de recursos, mas no se cuenta en la actualidad con un SIG de software libre que implemente estas técnicas de una manera amigable o factible para su utilización, por lo que surge la necesidad de la implementación de estas técnicas dentro de gvSIG para así satisfacer las necesidades actuales de las empresas cubanas y poder realizar estudios, sugerencias y mejoras a los planes actuales de distribución de recursos en las mismas. La utilización de técnicas para la solución de problemas de enrutamiento de vehículos está bastante difundida en la actualidad dentro de cualquier análisis logístico en las empresas a nivel mundial y se implementan en SIG’s de software propietario como ArcGIS, mas ante la necesidad de su introducción dentro del módulo de análisis de redes de gvSIG, surgen las siguientes Preguntas de Investigación: . ¿Cuáles son los principales análisis y tipos de problemas que se pueden resolver mediante la utilización de análisis de redes?. . ¿Qué técnicas y algoritmos pueden ser utilizados para la resolución de problemas de enrutamiento de vehículos?. . ¿Qué Sistemas de Información Geográfica implementan técnicas de enrutamiento de vehículos a nivel mundial?. . ¿Cómo implementar una de estas técnicas dentro del módulo de análisis de redes de gvSIG?. Teniendo en cuenta la problemática planteada y las preguntas de investigación se plantearon los siguientes objetivos: Objetivo General: Implementar una técnica que posibilite la resolución del problema de enrutamiento de vehículos para extender el módulo de análisis de redes de gvSIG y así dotar a este Sistema de Información Geográfica de esta herramienta de análisis de redes. Objetivos específicos: 4.
(16) “INTRODUCCIÓN”. . Seleccionar una variante del problema de enrutamiento de vehículos y una técnica de resolución para su inclusión dentro del módulo de análisis de redes de gvSIG.. . Implementar la técnica para la solución de la variante del problema de enrutamiento de vehículos seleccionada, dentro del módulo de análisis de redes de gvSIG.. . Desarrollar una guía para la inclusión de esta técnica dentro del módulo de análisis de redes de gvSIG.. Justificación de la investigación: El uso de Sistemas de Información Geográfica (SIG) ha llegado a ser esencial en todos los campos relacionados con la geografía y el medio ambiente, pasando por las aplicaciones más clásicas de cartografía, urbanismo y gestión de recursos. Actualmente se utilizan los SIG para resolver problemas tan diversos como la planificación de la extinción de incendios, el análisis de riesgos ambientales, la propagación de contaminantes o la optimización en cálculos de distribución de rutas de transporte público. Las técnicas de resolución de problemas de enrutamiento de vehículos permiten la realización de análisis logísticos que posibilitan la optimización o mejora en la distribución de los recursos dentro de las empresas, posibilitando un mejor empleo de los mismos, un factor muy importante este, para garantizar un mejor rendimiento y productividad. En la actualidad la mayoría de los SIG utilizados a nivel mundial para realizar análisis de redes implementan algoritmos de enrutamiento de vehículos, mas existe la dificultad de que estos son softwares propietarios. El Sistema de Información Geográfica gvSIG es un software de distribución libre que hasta el momento no brinda la posibilidad de realizar análisis de enrutamiento de vehículos sobre las redes que implementa. Por lo tanto surge la necesidad de implementar en gvSIG la posibilidad de resolución de problemas de enrutamiento de vehículos como parte importante de los análisis de redes que se realizan en la actualidad dentro de los SIG a nivel mundial. Antecedentes: Como antecedente de la operación Enrutamiento de Vehículos en los Sistemas de Información Geográfica (SIG) tenemos la implementación de la operación en ArcGIS, pero este es un software propietario y no se puede acceder al código del mismo. El gvSIG es otro popular. 5.
(17) “INTRODUCCIÓN”. SIG, que presenta otras operaciones para el análisis de redes, pero no contiene la operación antes mencionada. Viabilidad de la investigación: El estado actual de las técnicas para la resolución del problema de enrutamiento de vehículos y el desarrollo de los SIG ofrece una amplia gama de ideas para desarrollar en este trabajo. Para el desarrollo de esta investigación se cuenta con los recursos necesarios para acometer las tareas propuestas, que incluyen los códigos fuentes del SIG, la información cartográfica y la capacidad de procesamiento de datos y de gráficos. Por otro lado se cuenta con el apoyo del grupo de investigación Computación Grafica del Centro de Estudios de Informática de la UCLV “Marta Abreu” de las Villas, que tiene suficiente experiencia en el área. Después de haber elaborado el marco teórico se formuló la Hipótesis general de investigación siguiente: La ampliación del Sistema de Información Geográfica gvSIG con la inclusión dentro de su módulo de redes de la posibilidad de analizar y resolver problemas de enrutamiento de vehículos permitiría que se puedan tratar problemas de optimización de recursos y logísticos que permiten un mejor aprovechamiento de los recursos dentro de las empresas. Estos problemas logísticos son de amplio estudio y trabajosos en su resolución sin una herramienta especializada, por lo que su introducción en gvSIG nos permitiría el estudio de casos prácticos y reales de las empresas e instituciones nacionales. El trabajo se estructura en tres capítulos. En el primero de ellos se abordan los aspectos teóricos relacionados con redes, sus componentes, tipos de redes que se implementan dentro de los sistemas de información geográficos, se explican los diferentes análisis que se realizan sobre estas redes abordándose con mayor profundidad todo lo relacionado con el caso específico del enrutamiento de vehículos. Se exponen las características generales de los SIG y se profundiza en los tipos de análisis de redes que estos realizan. En el capítulo dos se exponen los aspectos relacionados con el diseño y la implementación de la extensión al módulo de análisis de redes de gvSIG. Se mencionan algunos aspectos sobre la implementación de la técnica de resolución a la variante seleccionada del problema de enrutamiento de vehículos.. 6.
(18) “INTRODUCCIÓN”. En el capítulo tres se muestra el manual de usuario de la extensión. Finalmente se formulan las conclusiones, recomendaciones y se relaciona la bibliografía.. 7.
(19) 8.
(20) “CAPÍTULO 1”. CAPÍTULO 1. REDES Y SISTEMAS DE INFORMACIÓN GEOGRÁFICA. En el presente capítulo se tratan los principales conceptos y tipos de redes. Se abordan las principales características de los SIG así como una descripción de los más utilizados en el mundo del software libre y propietario para el análisis de redes. Además se brindan elementos que evidencian la integración de operaciones para el análisis de redes de transporte con los SIG. También se tratan los principales conceptos y características de los algoritmos metaheurísticos más utilizados y reconocidos en la optimización combinatoria.. 1.1 Teoría de redes Cualquier sistema de elementos interconectados mediante líneas, como las carreteras, las vías de tren, los ríos o las redes eléctricas, puede ser concebido como una red. Mediante redes se realiza el movimiento de personas, el transporte de bienes y servicios, las comunicaciones y los flujos de energía o recursos. Una red se configura como un sistema de nodos entre los que se establecen relaciones a través de arcos. Por esa red puede viajar energía o materia. Definiciones más concretas del concepto son las siguientes: “Una red es un sistema interconectado de elementos lineales, que forma una estructura espacial por la que pueden pasar flujos de algún tipo: personas, mercancías, energía o información”(Bosque Sendra and Ramírez, 2001). “Una red está formada por una serie de arcos interconectados, a través de los cuales es posible el movimiento de recursos, de acuerdo con ciertas restricciones” (Puebla and Gould, 1994). De manera más general y resumiendo las redes son sistemas interconectados de elementos lineales formando una estructura espacial por la que circula algún tipo de flujo (Davis, 2001). Estos flujos pueden ser de personas, bienes, agua, energía, información, tráfico, etcétera, solo dependiendo de lo que la red represente. 1.1.1 Componentes de una red Como queda reflejado en las definiciones anteriores, los principales componentes de una red son los elementos lineales, los arcos, pero la sola existencia de los arcos no justifica la. 9.
(21) “CAPÍTULO 1”. existencia de una red. Es necesario que exista un flujo de materia o energía entre esos arcos, y este flujo procede de determinados elementos puntuales conocidos como nodos. Una red la componen, pues, elementos lineales y puntuales: . A los elementos lineales (arcos) se pueden asociar parámetros de fricción (longitud, tiempo en ser recorrido, etcétera) o propiedades (sentido de la marcha, o condiciones a la conectividad).. . A los elementos puntuales (nodos) se les puede asignar una fricción (tiempo de espera en los semáforos), o propiedades (información temática como, por ejemplo, número de habitantes de un núcleo de población).. Los objetos lineales o arcos interrelacionan pares de nodos y definen el origen y destino de los flujos que pasan entre ellos. La más simple de las líneas requiere al menos el almacenamiento de los puntos de origen y destino, un par de coordenadas XY (nótese que, en geografía se suele denominar X al eje norte-sur e Y al eje este-oeste, al contrario de cómo suele ser para la abscisa y la ordenada en cualquier eje cartesiano común). Una poli-línea o cadena es una serie de pares de coordenadas XY que describen una línea compleja y continua (McDomell, 2000). Cuanto más corto sean los segmentos que la componen, más grande será el número de pares de coordenadas XY que la definen, y más se aproximará la poli-línea a formar una curva compleja. El atributo más importante asociado a una arista es su longitud. Esta longitud puede expresarse también como el coste de atravesar dicha arista, más comúnmente conocido como impedancia. La impedancia es entonces la oposición de la arista a que el flujo pase a lo largo de ella, o el coste producido por dicho paso. El camino escogido por un proceso de enrutamiento será siempre el de menor impedancia total; el usuario definirá que atributo considera que debe ser la impedancia: tiempo, dinero, riesgo, etcétera. Dependiendo del caso, otro atributo incorporado a las líneas y cadenas de una red puede ser la oferta o la demanda de un bien a lo largo de ella. Los elementos puntuales o nodos son los cruces existentes entre las distintas aristas de una red. Cualquier entidad geográfica o gráfica con una posición definida por un único par de coordenadas XY puede ser considerada como un objeto puntual. Aparte de sus coordenadas, otro tipo de información en forma de atributo puede especificar la naturaleza del elemento. 10.
(22) “CAPÍTULO 1”. puntual o añadir información que sea útil al análisis. Normalmente, el atributo más importante de un elemento puntual es la oferta o demanda relacionada a un bien determinado. En la cosecha maderera, por ejemplo, se puede establecer la posición de los distintos rodales forestales y el atributo de volumen total a cosechar en cada uno de ellos como información de referencia de la demanda. Es posible entonces establecer la posición de los cargaderos de madera y su atributo de capacidad como información sobre la oferta. Un nodo puede ser también una barrera, cuando se trata de una unión de elementos lineales que no puede ser cruzada. Utilizando la estructura de un grafo, se puede representar como una red diversas entidades de la realidad. En un grafo se establecen las coordenadas de los nodos como sus posiciones relativas. Después se determinan las relaciones entre pares de nodos mediante las aristas del grafo (Sendra and García, 2000). El análisis de una red de drenaje o de transporte de carreteras precisa de una información de interconectividad que no es inherente a sus elementos simples, sean líneas simples o poli-líneas. Para lograr esta información sobre una red de elementos lineales interconectados que pueden ser recorridos por un ordenador, se requiere añadir una serie de puntos topológicos a la estructura de datos. Normalmente, esta estructura de puntos topológicos se desarrolla por la presencia de los nodos. Además de definir la posición de las aristas, los nodos pueden contener información sobre el ángulo con el que cada arista se une a él, definiendo así la topología de la red perfectamente. Esta estructura simple de uniones conlleva algunas redundancias, ya que las coordenadas de cada nodo son grabadas n + 1 veces, siendo n el número de aristas que se unen a un mismo nodo (McDomell, 2000). Debido a esto, en los SIG la información de una red se organiza de forma diferente a cómo sería si se tratase de sus mismos elementos lineales y puntuales aislados. 1.1.2 Tipos de redes en los sistemas de información geográfica En el ámbito de los Sistemas de Información Geográfica (SIG), las redes son empleadas para modelar dos tipos de fenómenos, los de transporte y los de servicios: Las redes de transporte son redes no direccionadas, lo que significa que aunque una línea tenga una dirección establecida, quien la utilice es libre de decidir la dirección a seguir, su velocidad y el destino: es el caso de los peatones, o del tráfico rodado.. 11.
(23) “CAPÍTULO 1”. En este tipo de red existen restricciones al flujo, del tipo “calles con dirección única”, “prohibido girar a la izquierda” (que afectarían a los vehículos), o bien “prohibido circular por la acera en autovías” (que afectaría a los peatones). Las redes de servicios (o geométricas) son direccionadas, lo que implica que el agente o recurso que las utiliza (agua, electricidad, etcétera) fluye a través de la red dependiendo de ciertas reglas establecidas y que su ruta está pre-determinada. Las reglas pueden ser modificadas, pero no por el agente mismo sino por quien controla la red, que mediante la apertura y cierre de válvulas (en el caso del agua, por ejemplo), puede modificar la dirección del flujo en la red. 1.1.3 Redes de servicio Las redes de servicios (o geométricas) son direccionadas, lo que implica que el agente o recurso que las utiliza (agua, electricidad...) fluye a través de la red dependiendo de ciertas reglas establecidas, y que su ruta está pre-determinada. El agente en la red, por ejemplo el petróleo que circula por una conducción, no puede elegir la dirección en la que circular; en su lugar, existen fuerzas externas que determinan la ruta: gravedad, electromagnetismo, presión del agua y así sucesivamente. Un ingeniero puede controlar el caudal del agente controlando cómo actúan las fuerzas externas sobre el agente. Las reglas pueden ser modificadas, pero no por el agente mismo sino por quien controla la red, que mediante la apertura y cierre de válvulas (en el caso del agua, por ejemplo), puede modificar la dirección del flujo en la red. En los modelos vectoriales, una red de servicios se representa mediante grafos geométricos cuyos nodos y arcos se muestran mediante puntos y líneas, respectivamente. Tanto los puntos como las líneas indican la localización de los nodos y arcos en el espacio. Los grafos geométricos, aun cuando capturan la localización y topología de las entidades en el espacio, tienen muchas limitaciones para representar otras propiedades; pues no capturan, por ejemplo, propiedades geométricas, tales como la forma, dirección y orientación que tienen las entidades de la red en el mundo real. Por otro lado, los modelos de rejillas, entre los cuales el modelo raster es el más conocido, representan los nodos y enlaces de una red de servicios mediante conglomerados y secuencias lineales de celdas, respectivamente. Una celda es un conjunto de píxeles que tienen forma. 12.
(24) “CAPÍTULO 1”. poligonal, normalmente rectangular. Este tipo de modelos captura implícitamente la forma y topología de la red, pero la calidad de la representación está restringida por el tamaño de la celda. Otra deficiencia de los modelos teselares es que la distinción entre los nodos y arcos de la red se pierde, lo cual dificulta la caracterización de los objetos que las celdas representan. 1.1.4 Redes de transporte Las redes de transporte son redes no direccionadas, lo que significa que aunque una línea tenga una dirección establecida, quien la utilice es libre de decidir la dirección a seguir, su velocidad y el destino: es el caso de los peatones, o del tráfico rodado. El agente en la red, por ejemplo, un camionero que viaja por carreteras, suele tener libertad para decidir la dirección de la travesía así como el destino. En este tipo de red existen restricciones al flujo, del tipo “calles con dirección única”, “prohibido girar a la izquierda” (que afectarían a los vehículos), o bien “prohibido circular por la acera en autovías” (que afectaría a los peatones). Cuestiones típicas que resuelve el análisis de redes de transporte son: . Diseñar la ruta más adecuada para ir de la casa al trabajo.. . Seleccionar los hospitales más cercanos a un accidente.. . Calcular la matriz de tiempo entre todos los centros poblacionales de una determinada región.. . Generar el área de influencia de una tienda o centro comercial.. . Elegir el servicio mejor ubicado respecto a la demanda.. 1.2 Operaciones sobre redes de transporte Las operaciones sobre redes de transporte mediante la utilización de los SIG están destinadas a establecer patrones de movilidad caracterizados por un bajo número de desplazamientos, especialmente los de largo radio, y un uso mayoritario de medios no motorizados. Además de lograr un sistema de transporte público eficaz y espacialmente equitativo, que favorezca tanto la accesibilidad como la movilidad de la población y que garantice la conexión entre los desplazamientos a escala intra e interurbana. También pretende crear un modelo urbano caracterizado por la densidad y mezcla de usos, que minimice la necesidad de desplazamientos de largo radio, y por el bajo impacto ambiental y social de las infraestructuras de transporte y servicios. 13.
(25) “CAPÍTULO 1”. 1.2.1 Camino mínimo El principal criterio para tomar una decisión sobre un enrutamiento u otras aplicaciones del análisis de redes de transporte es normalmente el del camino más corto desde un nodo de origen a uno de destino. Entiéndase que nos referimos como más corto únicamente en el caso de que el atributo que nos interese minimizar sea principalmente la distancia. No obstante, podríamos también referirnos al camino más barato en el caso de una minimización de costes de recorrido, o el camino menos resistente cuando hablemos de impedancia. Una de las aplicaciones prácticas más importantes de un análisis de redes basado en los SIG es la posibilidad de determinar rutas óptimas entre diferentes nodos. Una ruta óptima es la que minimiza los costes de recorrido. Para ello es necesario previamente determinar las distancias dentro de la red. El camino más corto es por tanto la sucesión de aristas que permite alcanzar un determinado punto de la red utilizando el mínimo tiempo o coste necesario (Weigel, 2001). George B. Dantzig (1914-2005) desarrolló un algoritmo heurístico (de ensayo y error) que soluciona este problema (Eppstein, 1993). Otro instrumento útil para la mayoría de los análisis de rutas óptimas es la posibilidad de disponer de una lista de objetos que deben ser traspasados a lo largo del camino entre el punto de origen y el de destino. El mencionado algoritmo de Dantzig permite conservar una lista de aristas y nodos por los que se puede conseguir el objetivo de la mínima distancia o coste de recorrido (Sendra and García, 2000). Esta herramienta está ya normalmente implementada en todos los software de navegación de vehículos basados en los Sistemas de Posicionamiento Global (GPS) y en páginas web de búsqueda de rutas que son fáciles de encontrar en la internet. Camino mínimo o nueva ruta permite hallar el mejor camino para ir de una localización a otra, o el mejor modo de visitar diferentes localizaciones. La mejor ruta entre más de dos puntos puede ser determinada siguiendo un orden fijo de paradas, especificando la primera y última parada, o bien dejando que el algoritmo elija la secuencia de visitas más adecuada (de menor coste). La mejor ruta puede tener diferentes significados en distintas situaciones: puede ser la más rápida, la más corta, la más segura o la que posee mejores vistas, dependiendo de la impedancia utilizada. Por ejemplo, si la impedancia es el tiempo, la mejor ruta será aquella que se recorra en menos tiempo: cualquier atributo de coste puede ser utilizado como impedancia a la hora de determinar la mejor ruta. 14.
(26) “CAPÍTULO 1”. Figura 1 En el ejemplo se elige como impedancia la distancia. Por consiguiente, la longitud de la ruta más corta es 4,4 millas, y se tarda en recorrer 9 minutos.. 1.2.2 Facilidad más cercana Siguiendo el mismo procedimiento que el análisis del camino más corto, es también posible encontrar la instalación o el servicio más cercano a un determinado punto. Para ello se incluiría una lista de los mencionados servicios en una capa que se superponga a la red. Este instrumento es uno de los más utilizados en los programas de SIG destinados a la organización logística y enrutamiento; para encontrar por ejemplo la parada de autobús, cajero automático, hospital, almacén, tienda, comisaría o estación de bomberos más cercana. La primera operación típica que un SIG puede realizar para este propósito es realizar un buffer del punto de origen del análisis. En algunos casos, a un enrutamiento realizado por este método se le denomina vuelo de pájaro (as the crow flies). Una operación se denomina buffer cuando construye un nuevo polígono o grupo de polígonos identificando todas las áreas que se encuentran dentro de una distancia especificada a partir de las aristas de la red(Longley P. A., 2001). Esta operación es en la mayoría de los casos inadecuada e insuficiente para organizar una red apropiadamente (Weigel, 2001), ya que no tiene en cuenta ningún otro atributo más que la distancia Euclídea. Como se explicará más adelante, un buffer puede ser utilizado también para determinar el área de servicio de una determinada instalación, por ejemplo de almacenamiento. Esta operación puede realizarse no sólo en SIG vectorial sino también en raster, por lo que en este último se pueden incluir intrínsecamente en sus celdas la información sobre los atributos requeridos por el análisis concreto(Longley P. A., 2001). Por ejemplo, es posible pedirle a un SIG raster que extienda un buffer a partir de un determinado punto teniendo en cuenta tiempos, impedancias o fricciones, o costes de recorrido recogidos por separado en cada una de las celdas de un raster. En este caso, la forma de los buffer no sería la 15.
(27) “CAPÍTULO 1”. clásica, sino que vendría deformada según se reparta el citado atributo por el espacio. Dependiendo de cada caso, seguramente puede interesar que esta sea una función inversa . a la velocidad de recorrido, por ejemplo. . acumulativa, de gasolina gastada.. Una generalización de esta herramienta para toda el área de estudio servirá para hacer un análisis de asignación a un centro, como se explicará más adelante. Encontrar el hospital más cercano a un accidente, los 4 coches de policía más cercanos a un crimen, o las tiendas que están a menos de media hora de un consumidor, son todos ejemplos de localización de servicios o instalaciones, y se engloban dentro del tipo de análisis denominado facilidad más cercana. Se denomina “facilidad” a los hospitales, coches de policía, o a las tiendas, mientras que el accidente, la ubicación del consumidor o el crimen, son considerados “incidentes”. Este tipo de análisis trata de encontrar los elementos más cercanos a un punto dado, o en un radio determinado, teniendo en cuenta que: . El punto donde se inicia la búsqueda es conocido como “incidente”, y puede haber más de uno.. . Lo que se busca se denomina “facilidad”.. . Puede especificarse el número de “facilidades” a encontrar, y utilizar diferentes “incidentes”.. . También puede especificarse un coste máximo (en tiempo o distancia), más allá del cual no se prosigue el análisis.. . Esta ruta puede ser recorrida desde o hacia el elemento en cuestión.. 16.
(28) “CAPÍTULO 1”. Figura 2 Por ejemplo, podría configurar un problema de instalación más cercana para buscar hospitales a menos de 15 minutos de tiempo de recorrido desde la ubicación de un accidente.. 1.2.3 Área de servicio En las aplicaciones de asignación se indica la posición de las distintas instalaciones o centros de los que puede provenir un flujo determinado; el procedimiento asigna a cada componente lineal de la red uno de esos centros de flujo. De esta forma se consigue un reparto eficiente del flujo a lo largo de la red. El conjunto de elementos lineales asignados a un centro de flujo se denomina el área de servicio de ese centro. Esta operación se parece bastante a la realización de un buffer, aunque en este caso se tiene en cuenta la información de varios puntos de servicio a la vez y se realiza según las características de la red. De hecho, el SIG no construye un área poligonal sino un árbol alrededor de cada punto (Tomlinson, 2003); esta estructura en forma de árbol es el camino más corto en tiempo o coste. Una vez que los puntos, o centros de demanda, se encuentran localizados en una operación de ubicación o situación (locación), es posible identificar los componentes lineales de una red que pueden llevar a dicho centro, asignación a un centro (allocate in), o a los que se puede llegar desde el centro, área de servicio (allocate out). Las operaciones de asignación a un centro identifican las líneas de un circuito que deben ser utilizadas para transportar gente o materiales hasta cada centro de demanda identificado; un ejemplo de este tipo de operación puede ser la asignación de los diferentes alumnos a cada escuela de una ciudad, o la organización de rutas para el transporte de dichos alumnos.. 17.
(29) “CAPÍTULO 1”. Al contrario, la generación de un área de servicio identifica los elementos vectoriales de una red que deben ser utilizados para distribuir desde un centro determinado; es un análisis típico de reparto de áreas de servicio entre las pizzerías o las oficinas de correos que se encuentran en una ciudad. El área de servicio de un centro depende de la accesibilidad de cada punto de la red a las actividades de sus instalaciones (Davis, 2001). La accesibilidad puede ser definida como la facilidad para alcanzar la oferta existente sobre un determinado bien o servicio, cuando esta oferta no se reparte de una forma uniforme dentro del área que cubre la red. Por lo tanto, el concepto de accesibilidad está íntimamente relacionado con el concepto de distancia entre la oferta y la demanda, por lo que su cálculo difiere de la misma forma entre un análisis de redes y un cálculo convencional de accesibilidad en SIG. El área de servicio puede entonces depender de la oferta de un determinado bien en cada punto de la red, de los horarios y disponibilidad temporal de cada uno de los servicios ofrecidos, o de la propia demanda del centro para el que se establece el área de servicio (Sendra and García, 2000). Medidas de la accesibilidad basadas únicamente en la distancia: son de uso común en el establecimiento de áreas de servicio de emergencias hospitalarias, bomberos, o áreas de reparto de correo, ya que cualquiera puede utilizar el servicio sin que exista ninguna limitación en la oferta. Por lo tanto, la accesibilidad (Ai) de un centro de demanda i, es equivalente a la distancia (Dij) entre dicho centro y el punto de oferta más cercano j: Ai= Dij. También es posible tener en cuenta la posición del centro de demanda respecto a todos los puntos de oferta disponibles en la red, expresándola como la suma: Ai=∑. , o la medida: Ai=. ∑. El área de servicio de una instalación se construye a partir de la accesibilidad total (At) de ese centro de demanda hasta cada punto de la red. (At) se obtiene sumando todas las mínimas distancias (DMINij), el camino más corto desde las instalaciones de demanda i a cada punto de oferta j, y multiplicándolo por el valor de la demanda en dicha instalación (Dei). Dado un grupo de instalaciones con diversos valores de demanda, sus áreas de servicio serán determinadas por los valores de (At) que obtengan cada una de ellas. El área de servicio de un centro serán todos los puntos de oferta en la red para los que la accesibilidad total (At) a ese. 18.
(30) “CAPÍTULO 1”. centro es mayor que para el resto de los centros. En explotaciones forestales, los centros de demanda pueden ser los distintos cargaderos situados en la zona, y el valor de la demanda puede ser su capacidad máxima de almacenamiento. Su capacidad aumentará en este caso el área de servicio de cada cargadero. En el análisis se podría incluir además el valor de la oferta expresado en este caso por el volumen a cosechar en cada punto de la plantación. El valor de la oferta se pude incluir tal y como se detalla a continuación. Medidas de la accesibilidad basadas en la distancia y en el valor de la oferta en cada punto: en este caso, la accesibilidad (Ai) de un centro de demanda depende directamente de la oferta disponible en cada punto de la red (Oj) y, e inversamente a una función de la distancia (F (Dij)) entre el centro de demanda y los puntos de oferta: Ai=∑ Por lo tanto, según cambie dicha función (F (Dij)) podremos dar una mayor o menor importancia a la distancia, respecto de la cantidad de oferta. Así entonces, podemos por ejemplo asumir que la distancia disminuye linealmente dependiendo de un parámetro b que tenga el valor que se quiera considerar en cada modelo: Ai=∑ O podemos de otra forma resumir que la distancia disminuye exponencialmente dependiendo también de un parámetro b también según consideremos en cada caso: Ai=∑ Este caso puede ser de gran utilidad, por ejemplo, cuando la oferta deba ser alcanzada por peatones en lugar de vehículos. Gracias al concepto de accesibilidad podemos asignar el área de servicio al que un punto de la red pertenece entre todos los centros de demanda disponibles. En un primer paso, se pueden repartir áreas de servicio teniendo sólo en cuenta un análisis del camino más corto. Posteriormente, se puede sofisticar el modelo teniendo en cuenta varios factores de oferta y demanda repartidos en el espacio cubierto por la red, tal y como ha sido explicado. El cálculo de áreas de servicio permite encontrar las zonas de impacto alrededor de una o varias. 19.
(31) “CAPÍTULO 1”. localizaciones sobre la red. Estas localizaciones se denominan (quizás no muy adecuadamente) Facilidades”. La red de área de servicio es un polígono (o región) que engloba todas las calles accesibles en función de una impedancia dada (por ejemplo, todas las que se encuentra a menos de una hora de un punto), en torno a una o varias “facilidades”. También es posible generar múltiples áreas de servicio concéntricas, lo que permite comprobar cómo la accesibilidad cambia con un aumento en la impedancia; por ejemplo, conocer cuántos hospitales se encuentran a 5, 10 y 15 minutos de una escuela, o variar los valores de la impedancia para las distintas “facilidades” empleadas (a 5 minutos de la Farmacia A, a 22 minutos de la Farmacia B, etcétera), podría también decidirse el sentido del análisis (desde el punto de búsqueda o hacia él).. Figura 3 Por ejemplo, el área de servicio de 10 minutos para una instalación incluye todas las calles a las que. se puede llegar desde esa instalación en un plazo de diez minutos, representada aquí por un polígono.. 1.2.4 Matriz de costos De una serie de orígenes (O) y destinos (D), un SIG construye una matriz OD de distancias, tiempos o costes entre cada par OD (Weigel, 2001). Esta es una herramienta muy común que se suele representar como una red. Las matrices OD son ampliamente utilizadas como un primer paso antes de realizar otros análisis de redes. Una matriz OD que contiene información sobre el tiempo de viaje o la distancia desde un cliente a otro proporciona la información primaria para un análisis de asignación de recursos, secuenciación, o procedimiento de mejora de rutas.. 20.
(32) “CAPÍTULO 1”. El tiempo recorrido se obtiene aplicando para cada par Origen/Destino el algoritmo del camino más corto dentro de un SIG con la base de datos de las calles donde se realiza el negocio. De esta forma se puede prevenir la formación de escenarios irreales que expresen rutas que atraviesen montañas, lagos, o zonas sin acceso por carretera. Es crucial el cálculo de tiempos y distancias precisos si se requiere una solución de calidad. De hecho, aunque dos puntos de una zona montañosa pueden parecer cercanos si nos basamos en el cálculo de la distancia Euclídea entre ellos, estos bien pudieran estar a muchos más kilómetros de distancia al tener que recorrer las carreteras que se encuentran entre ellos. Una matriz OD puede ser desarrollada en un SIG con alta precisión si se tienen en cuenta diversos criterios para su cálculo, tales como límites de velocidad, calles de un solo sentido de circulación, barreras, o incluso puntos de comienzo y destino de todas las rutas o lugares donde descargar o almacenar.. Figura 4 Matriz de costos entre todos los puntos de la red señalando el caso específico del recorrido entre Milwaukee y Detroit.. 1.2.5 Localización-Asignación Los modelos de localización-asignación son un conjunto de procedimientos matemáticos que intentan buscar soluciones al problema de donde situar centros de servicios (en sentido amplio) de manera que se optimicen ciertos valores considerados importantes a la hora de que los usuarios utilicen dichos servicios (Bosque Sendra and Moreno Jiménez, 1990). Esto implica, por lo tanto, definir primero las magnitudes que son relevantes para el empleo de las instalaciones por la población y después formular una expresión matemática de dichas magnitudes, de tal manera que el modelo obtenga un óptimo de su valor, mínimo o máximo,. 21.
(33) “CAPÍTULO 1”. dependiendo del tipo de servicio a localizar. La mayoría de los modelos han sido diseñados para determinar las localizaciones óptimas de una o varias instalaciones deseables (usualmente idénticas), de tal manera que se obtenga su mejor distribución espacial a partir de minimizar los costos o tiempos totales de transporte (Bosque Sendra and Moreno Jiménez, 1990). Más recientemente se han abierto líneas de investigación dedicadas a determinar la óptima ubicación para aquellas instalaciones que, a pesar de su carácter imprescindible, son consideradas no-deseables ya que representan riesgos a la salud o, más en general, inciden en el deterioro de la calidad de vida de la población localizada en sus proximidades(Stevens, 1985). La localización-asignación posibilita la realización de análisis relacionados con una doble vertiente: la localización óptima de servicios, y la asignación de los puntos de demanda a esos servicios. Para esto se ofrecen dos tipos de soluciones relativamente sencillas: minimizar la impedancia y minimizar las facilidades (servicios). . Minimizar la impedancia: selecciona un número especificado de servicios localizados en posiciones tales que se consigue que el costo de acudir a ellos desde los puntos de demanda sea el mínimo.. Si se especifica un coste máximo, el algoritmo soluciona el típico problema de la localización óptima de almacenes, pues el transporte de mercancías hacia las tiendas debe considerar ese coste máximo. Si no se indica un coste máximo, el algoritmo sirve para conocer cuál sería la ubicación óptima de servicios públicos tales como bibliotecas, hospitales, etc. . Minimizar los servicios: selecciona el mínimo número de servicios para abastecer a la demanda, pero siempre dentro de un umbral definido por el usuario. Es un algoritmo diseñado para solucionar problemas en los que la impedancia tiene un máximo, como hospitales, parques de bomberos, o centrales de policía.. Minimizar la impedancia y Minimizar los servicios se diferencian básicamente en un punto: . El primero permite indicar el número de servicios a elegir (por ejemplo, seleccionar solo una iglesia, la mejor situada respecto a la población), siempre y cuando se encuentren a. 22.
(34) “CAPÍTULO 1”. menos de un valor de impedancia elegido; A aquellos puntos de demanda que se encuentren más allá de la facilidad elegida, no se les asigna ninguna. . El segundo no permite indicar el número de servicios a elegir, pero elegirá siempre el mínimo número, cuyo valor dependerá del valor de la impedancia estimado: todos los puntos de demanda (población) serán satisfechos, aunque para ello haya que aumentar el número de servicios (Iglesias).. En esencia, y siempre a través de una red de transporte cuya impedancia puede estar basada principalmente en la distancia o el tiempo, permite a través de una serie de algoritmos, afrontar cuestiones muy variadas que relacionan la ubicación de una serie de servicios, con la localización de una serie de puntos de demanda, usualmente ponderados por la población. Los objetivos concretos son: . Minimizar la impedancia.. . Maximizar la cobertura. . Minimizar los servicios. . Maximizar la atención al cliente. . Maximizar el mercado compartido. . Ubicar un servicio (entre competidores). El problema que todas estas herramientas resuelven se basa en lo siguiente: “dadas N instalaciones candidatas y M puntos de demanda con un peso, elegir un subconjunto de instalaciones, P, tal que se minimice la suma de las distancias desde cada M hasta el P más cercano”. Se trata de un problema combinatorio del tipo N elige P, y las combinaciones posibles crecen exponencialmente a medida que aumentan N y P. Por ejemplo, si N es igual a 100 y P igual a 10, las combinaciones son más de 17 billones… Por esta razón, para resolver este tipo de cuestiones se emplean heurísticas, que son métodos cuyo resultado no es fiable al 100%, pues no se calculan todas las posibilidades, pero sí que son los resultados más probables dado un tiempo de cálculo aceptable. Hay que destacar que la impedancia se puede denominar de tres maneras distintas: . Linear: directa.. . Power: los valores de distancia son elevados al valor del parámetro, de modo que. 23.
(35) “CAPÍTULO 1”. disminuye la importancia de los puntos de demanda más próximos. . Exponential: los valores de distancia pasan a ser el valor de E elevado al valor de un parámetro, multiplicado por la impedancia. La consecuencia es que aumenta la importancia de los puntos de demanda más próximos.. Los elementos del análisis son dos: . Facilidades: Servicios, que en determinados casos pueden ser ponderados.. . Puntos de Demanda: que usualmente poseen un valor (por ejemplo, número de habitantes). Figura 5 Localización – Asignación. 1.2.6 Enrutamiento de vehículos El enrutamiento es la típica herramienta en la que se basa los sistemas de navegación de vehículos basados en las tecnologías de GPS. Los atributos asociados a objetos lineales pueden identificar la naturaleza de un conector. Una carretera puede ser identificada no sólo por su anchura, superficie, clase o número de carriles, sino también por la densidad de tráfico o de demanda a lo largo de él. Añadiendo datos de series temporales de densidades de tráfico a la información de una ruta, tanto por días como por semanas, se puede tener una buena base para el cálculo de tiempos de ruta. De esta forma, los resultados pueden diferir significativamente de los encontrados por un análisis a vuelo de pájaro basado en un simple buffer (Weigel, 2001). Un análisis de redes basado en los atributos de los nodos y líneas puede producir resultados con mucho significado práctico. No se puede obtener un enrutamiento adecuado sin tener en cuenta calles de un solo sentido de circulación o cruces que no puedan ser traspasados en una dirección concreta. Otros atributos como la longitud de la vía, límites de velocidad, giros permitidos, señales, tiempos medios de. 24.
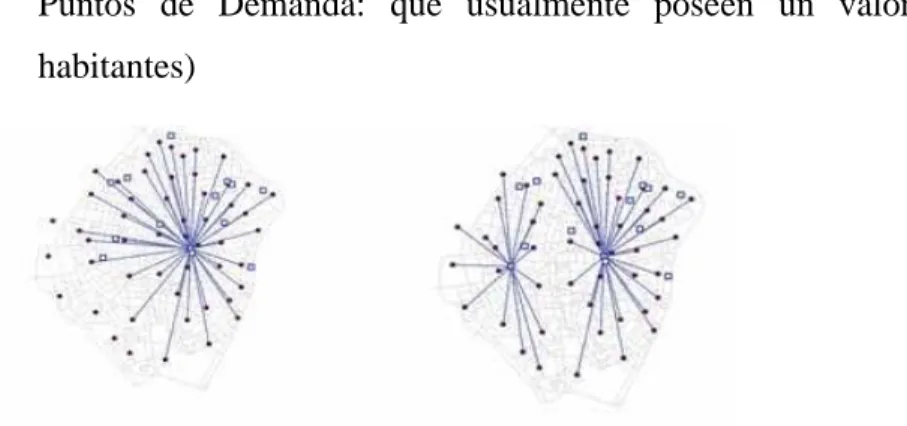
(36) “CAPÍTULO 1”. semáforos, desvíos, paradas, etcétera, pueden permitir describir con mayor precisión las propiedades de una red vial. Otras limitaciones pueden ser importantes en el cálculo de enrutamientos. El vehículo puede tener una capacidad máxima, o un límite de impedancia. Los valores de demanda son importantes a la hora de tener en cuenta los límites de capacidad. Cada línea puede tener un atributo con un valor de oferta, de forma que la capacidad máxima de un centro de demanda se iguale al valor total de oferta de toda la ruta calculada. Los límites de impedancia, tales como la distancia máxima de recorrido hasta un centro, pueden ser razonablemente aplicados simplemente tomando información directa de los atributos de los objetos de la red. Es también posible organizar una flota entera de diferentes tipos de vehículos, con diversas capacidades, horarios de servicio, coste de uso, costes por hora extra, etcétera (Longley P. A., 2001). También suele estar disponible la posibilidad de añadir una base de datos de diferentes destinos; los atributos de éstos pueden incluir datos sobre su accesibilidad, demanda, etcétera. En definitiva, se pueden tener en cuenta para el enrutamiento de vehículos datos basados en atributos de la propia red por la que se circula, de los vehículos que circulan, o de los propios centros de origen y destino a los que se dirigen. Este análisis afronta los problemas asociados a la utilización de varios vehículos al mismo tiempo para llegar desde el punto de partida a distintos destinos, y volver a un punto de llegada. El resultado final es una ruta asociada a cada uno de los vehículos empleados. La Figura 6 muestra tres rutas obtenidas a partir de la resolución del problema de generación de rutas para vehículos anterior.. Figura 6 Rutas calculadas para la entrega de los productos en el planteamiento del problema anterior. El número de parámetros del VRP es bastante más complejo que en los otros tipos de análisis; por cada vehículo debe indicarse una ruta y, por cada ruta:. 25.
(37) “CAPÍTULO 1”. . Capacidad de carga que soporta el vehículo (número o cantidad).. . Tiempo máximo de conducción (y/o) asociado a las 24 horas del día.. . Número máximo de lugares a visitar.. . Zona donde se desarrolla la ruta.. . Costo de la operación (gasolina, dinero, etcétera).. . Lugar de origen y destino (Depósito).. Por cada lugar a visitar (Cliente) también debe indicarse el número o cantidad del material a recoger o depositar. Dado que en un solo viaje puede que no se recojan o depositen todas las mercancías, por cada ruta puede indicarse donde se abastece cada vehículo, o donde deposita el material. En general, se pueden generar recorridos que solucionen problemas asociados tanto a la recogida como al depósito, o bien a los relacionados con entidades emparejadas (domicilio donde un paciente espera que una ambulancia lo lleve a un hospital determinado). El problema de ruteo de vehículos (Vehicle Routing Problem VRP) es un problema de optimización que trata aquellas situaciones en las que un agente de ventas debe visitar a sus clientes ubicados en diferentes lugares o ciudades y luego regresar a su punto de partida, consumiendo la menor cantidad de recursos posibles. Estos recursos pueden ser el tiempo que toma el recorrido, la distancia recorrida, entre otros. Dentro de los problemas VRP, se engloba un amplio conjunto de variantes que van desde problemas sencillos, hasta aquellos bastante complejos, que incluso hoy en día son materia de investigación. La complejidad de este tipo de problemas hace muy difícil su codificación y solución por métodos tradicionales, puesto que los únicos algoritmos exactos conocidos para resolver dichos problemas, tienen un tiempo de resolución que crece exponencialmente con el número de clientes. Por esta razón, los esfuerzos se han destinado a desarrollar algoritmos heurísticos que permitan encontrar buenas soluciones muy cercanas a la óptima. 1.2.6.1 Variantes del enrutamiento de vehículos Desde el surgimiento del problema de enrutamiento de vehículos los estudios realizados en pos de alcanzar una solución se han centrado en diferentes aspectos con respecto a los datos recogidos para la solución de estos problemas, centrando la mayor importancia en aspectos. 26.
(38) “CAPÍTULO 1”. como la capacidad de los vehículos, las cantidades y locaciones de los depósitos, las variantes de atención a los clientes entre otras, a partir de estas divisiones del problema fueron surgiendo a través del tiempo diferentes variantes del problema. Una breve explicación de cada una de estas variantes se da a continuación: . El caso más general de los problemas VRP es aquel que consiste en uno o varios vehículos que tienen una capacidad constante y limitada. Estos vehículos deben distribuir los productos entre sus clientes de acuerdo a la demanda de cada uno de ellos. Este tipo de problemas se conoce como Problemas de Ruteo de Vehículos con Capacidad (CVRP). (Li et al., 2005), (Ralphs et al., 2003, Ralphs et al., 2001). . Los Problemas de Ruteo de Vehículos con Múltiples Depósitos (MDVRP) son aquellos problemas en los que existen múltiples depósitos, cada uno con una flota de vehículos independientes y se debe distribuir los productos a todos los clientes. (Hjorring, 1995). . Los problemas de ruteo con entregas divididas (SDVRP) son aquellos en los que un cliente puede ser atendido por varios vehículos. Este tipo de problemas toma importancia cuando el tamaño de los pedidos excede la capacidad de un vehículo. (Dror et al., 1994). . Los problemas de ruteo periódicos (PVRP) contemplan un horizonte de operación de M días, periodo durante el cual cada cliente debe ser visitado una vez. (Baptista et al., 2002), (Angelelli and Grazia Speranza, 2002). . Aquellos problemas en los que se contempla la posibilidad de que los clientes puedan devolver determinados bienes, se denominan problemas de ruteo con entrega y recogida (VRPPD). (Gribkovskaia et al., 2001), (Righini, 2000). . Los problemas en que cada cliente tiene que ser provisto dentro de cierto espacio de tiempo se denominan enrutamiento de vehículos con ventas de tiempo (VRP with time Windows - VRPTW). (Cordeau et al., 2002), (Lau et al., 2003), (Lee et al., 2003). . Otra variante es en la que algunos valores como el número de clientes, la demanda, tiempo de servicio, tiempo de viaje puede ser aleatorio, estos problemas se denominan Stochastic VRP - SVRP. (Laporte and Louveaux, 1998). Un esquema de las variantes del problema de ruteo de vehículos sería tal como se muestra en la Figura 7 (Málaga, 2009).. 27.
(39) “CAPÍTULO 1”. Figura 7 Diagrama de las variantes del problema de ruteo de vehículos.. 1.2.6.2 Métodos exactos y aproximados para la solución de las variantes del VRP Para resolver estos tipos de problemas (VRP, VRPTW, PVRP, etcétera) se han desarrollado distintos algoritmos que se pueden dividir en algoritmos exactos y algoritmos aproximados. Métodos exactos Dentro de los métodos exactos que resuelven problemas del tipo VRP se tienen: Ramificación y acotación (Branch and bound) (Ramos, 2007) Es un método que usa la técnica de “divide y vencerás”. . Divide (ramifica) el conjunto de soluciones enteras en subconjuntos disjuntos cada vez menores.. . Determina (acota) el valor de la mejor solución del subconjunto. De acuerdo a una cota (superior o inferior).. . Poda (elimina) la rama del árbol si la cota indica que no puede contener la solución óptima.. Dentro de los algoritmos de tipo ramificación y acotación destacan los trabajos de (Laporte et al., 1986); (Fischetti et al., 1994) y (Contardo, 2005). Cabe destacar que el método de Fisher puede llegar a resolver hasta 71 nodos destino (clientes), sin embargo esto requiere un costo computacional muy elevado (Málaga, 2009). Ramificación y corte (Branch and cut) (Ramos, 2007). 28.
Figure




+7



Documento similar