Sistema de detección de vehículos de carga con altura mayor a puentes Vehiculares o Peatonales
151
0
0
Texto completo
(2) DEDICATORIA. Quiero dedicar el presente trabajo en primer lugar a Dios por permitirme estar vivo y brindarme la posibilidad de compartir estos momentos con ustedes y a mis padres por su cariño y apoyo incondicional, llegar a esta etapa de mi vida no hubiera sido posible sin ustedes.. i.
(3) AGRADECIMIENTO. Debo agradecer en primer lugar a la Universidad Nacional de San Agustín por darme la oportunidad de desarrollarme profesionalmente; en segundo lugar, a mis profesores que supieron guiar mis pasos durante mi etapa universitaria y finalmente a mi madre, que con su cariño y apoyo me motivaron a culminar este trabajo. Gracias y que dios los bendiga a todos.. ii.
(4) RESUMEN La presente tesis describe el diseño e implementación del prototipo de un sistema de control, el cual se encargará de evaluar la altura máxima de las unidades vehiculares de carga que transitan bajo los puentes peatonales y vehiculares, con el objetivo de dar una alerta visual al conductor para evitar daños a la integridad física (vida humana) y a la infraestructura de los puentes dentro de nuestra sociedad.. El primer capítulo de la presente tesis se aborda el planteamiento del problema de la tesis, aquí se enuncia el problema, se justifica la propuesta del proyecto y se definen los objetivos del proyecto de tesis.. El segundo capítulo se ocupa del marco teórico y operativo del proyecto. Dentro del marco teórico se desarrolla los sistemas de control, la comunicación por radio frecuencia (RF), los microcontroladores y sensores laser en la actualidad. Dentro del marco operativo se describen brevemente las herramientas de software que nos ayudaran a llevar a cabo este proyecto, estos son EAGLE (PCB design & Schematic Software) y CCS Compilers en el cual se desarrollara la programación debida para poder comunicar al respectivo hardware con los periféricos y entrelazar la recepción da datos vía RF (radio frecuencia) entre el emisor (Tx) y receptor (Rx).. El tercer capítulo realizaremos el análisis y desarrollo de la tesis, en el cual describiremos los componentes principales que intervienen en el sistema de control, su diseño y lógica funcional para poder llegar a la operatividad del sistema.. Finalmente, el cuarto capítulo describe el diseño e implementación del prototipo, el funcionamiento y procedimientos que se realizaran para cumplir la puesta en marcha del sistema de control del proyecto para poder realizar actividades operativas. iii.
(5) ABSTRACT. The present thesis describes the design and implementation of the prototype of a control system, which will be in charge of evaluating the maximum height of the vehicular load units that transit under the pedestrian and vehicular bridges, in order to give a visual alert to the driver to avoid damages to the physical integrity (human life) and the infrastructure of the bridges within our society.. The first chapter of the present thesis deals with the approach of the thesis problem, here the problem is stated, the project proposal is justified and the objectives of the thesis project are defined.. The second chapter deals with the theoretical and operational framework of the project. Within the theoretical framework is developed control systems, radio frequency (RF) communication, microcontrollers and laser sensors today. The operating framework briefly describes the software tools that will help us to carry out this project, these are EAGLE (PCB design & Schematic Software) and CCS Compilers in which the programming will be developed due to be able to communicate to the respective hardware with Peripherals and interlace receiving data via RF (radio frequency) between the transmitter (Tx) and receiver (Rx).. The third chapter will be the analysis and development of the thesis, in which we will describe the main components involved in the control system, its design and functional logic to be able to reach the operation of the system.. Finally, the fourth chapter describes the design and implementation of the prototype, the operation and procedures to be carried out to comply with the implementation of the project control system in order to carry out operational activities. iv.
(6) INDICE INTRODUCCIÓN .................................................................................................................. 1 CAPITULO I ........................................................................................................................... 3 1.. PLANTEAMIENTO DEL PROBLEMA DE INVESTIGACION ............................. 3. 1.1.. PROBLEMA DE LA INVESTIGAÓN ...................................................................... 3. 1.2.. JUSTIFICACIÓN ....................................................................................................... 5. 1.3.. TRABAJOS RELACIONADOS ................................................................................ 6. 1.4.. ALCANCE ................................................................................................................... 6. 1.5.. OBJETIVOS ............................................................................................................... 8. CAPITULO II ........................................................................................................................ 10 2.. MARCO TEÓRICO ................................................................................................. 10. 2.1.. MARCO CONCEPTUAL ........................................................................................ 10. 2.2.. OPERACIÓN DEL SOFTWARE ........................................................................... 30. CAPITULO III ....................................................................................................................... 47 3.. ANÁLISIS Y DESARROLLO DEL PROYECTO ................................................. 47. 3.1.. DESCRIPCIÓN DEL SISTEMA ............................................................................ 47. 3.2.. DIAGRAMA DE BLOQUES DEL SISTEMA DE CONTROL............................. 51. 3.3.. DIAGRAMA DE FLUJO DEL SISTEMA DE CONTROL ................................... 52. 3.4.. TOMA DE SEÑAL DEL SENSOR LÁSER .......................................................... 53. 3.5.. CIRCUITO INTEGRADO PIC16F876A ............................................................... 55. 3.6.. CONFIGURACIÓN DEL PUERTO RESET EN GENERAL .............................. 57. 3.7.. MÓDULO NRF24L01 + PA + NLA ....................................................................... 59. 3.8.. RELÉ ......................................................................................................................... 63. 3.8.1.. TIPOS DE RELÉ ................................................................................................. 64. 3.8.1.1.. RELÉS ELECTROMECÁNICOS .................................................................. 64. 3.8.1.2.. RELÉ DE ESTADO SÓLIDO ......................................................................... 65. 3.8.1.3.. RELÉ DE CORRIENTE ALTERNA .............................................................. 66. v.
(7) 3.8.1.4.. RELÉ DE LAMINAS ........................................................................................ 66. 3.8.1.5.. RELÉS DE ACCIÓN RETARDADA.............................................................. 66. 3.8.1.6.. RELÉ CON RETENCIÓN DE POSICIÓN ................................................... 68. 3.8.1.7.. RELÉS MULTITENSIÓN ................................................................................ 68. 3.9.. FUENTE DE ALIMENTACIÓN .............................................................................. 68. 3.10.. LETRERO LED .................................................................................................... 69. 3.11.. PANEL SOLAR .................................................................................................... 71. 3.12.. BATERÍA .............................................................................................................. 73. CAPITULO IV....................................................................................................................... 77 4.. DISEÑO E IMPLEMENTACIÓN DEL SISTEMA ................................................ 77. 4.1.. DISEÑO DEL PROTOTIPO DEL SISTEMA ....................................................... 77. 4.2.. SELECCIÓN DEL MICROCONTROLADOR ADECUADO............................... 82. 4.3.. DIAGRAMAS DEL CIRCUITO ELECTRÓNICO DEL PROTOTIPO ............... 83. 4.4.. TARJETA DEL TRANSMISOR ............................................................................. 91. 4.5.. TARJETA DEL RECEPTOR.................................................................................. 92. 4.6.. POSICIONAMIENTO DEL SENSOR LÁSER ..................................................... 93. 4.7.. TRANSMISIÓN Y RECEPCIÓN DE DATOS .................................................... 100. 4.8.. POSICIONAMIENTO DE ACTUADORES ........................................................ 101. 4.9.. CÁLCULO DE DISTANCIA MÍNIMA DE CARGA O TOLVA .......................... 102. 4.10.. DETERMINACIÓN DE TIEMPOS DE ACTIVACIÓN DE LOS. ACTUADORES .................................................................................................................. 103 4.11.. DETERMINACIÓN DE LA SELECCIÓN DEL SENSOR SUNX M18-L .... 105. 4.12.. DETERMINACIÓN DE DISTANCIA EMISOR/RECEPTOR DEL SENSOR. M18-L. 108. 4.13.. PRUEBAS DE OPERATIVIDAD DEL SISTEMA.......................................... 108. 4.14.. EVALUACIÓN DE RESULTADOS ................................................................. 114. 4.15.. ANÁLISIS TÉCNICO FINANCIERO ............................................................... 115 vi.
(8) CAPÍTULO V ...................................................................................................................... 116 5.. CONCLUSIONES.................................................................................................. 116. 6.. RECOMENDACIONES ........................................................................................ 117. 7.. BIBLIOGRAFÍA ...................................................................................................... 118. PÁGINAS WEB VISITADAS............................................................................................ 119 GLOSARIO DE TERMINOS ............................................................................................ 121 ANEXOS ............................................................................................................................. 122. vii.
(9) ÍNDICE DE FIGURAS Figura 1. Vehículo impactando contra puente peatonal………….………….….3 Figura 2. Consecuencias de impacto en el puente Mamacona……………..….4 Figura 3. Diagrama de bloques de un sistema de control………………….…11 Figura 4. Transmisión radioeléctrica………………………………….…..……..12 Figura 5. Diagrama de bloques de un transmisor…………………………...….14 Figura 6. Diagrama de bloques de un receptor…………………………..……..15 Figura 7. Diagrama de bloques de un microcontrolador…………………..…..16 Figura 8. Organigrama de la secuencia a seguir para el grabado del microcontrolador…….…….………………………………………………………22 Figura 9. Listado del programa EJEMPLO1.ASM………………..…………….23 Figura 10. Emisión fotónica de un diodo laser……………………………....…26 Figura 11. Espectro de emisión de un led y un láser………………………..…27 Figura 12. Diodo laser de estado sólido……………………………………...….28 Figura 13. Panel de control Eagle V6.4……………………………………….…35 Figura 14. Package………………………………………………………..……...36 Figura 15. Symbol…………………………………………………………….…...36 Figura 16. Device……………………………………………………..…………...37 Figura 17. Schematic (circuito electrónico) ………………………………....…38 Figura 18. Board (tarjeta electrónica con los componentes seleccionados)…39 Figura 19. Escritorio PIC Compiler PCW……………………………………..…46 Figura 20. Puente vehicular y peatonal……………………………………..…..48 Figura 21. Diagrama de bloques del sistema de control………………………51 Figura 22. Diagrama de flujo del sistema…………………………………..……52 Figura 23. Sensor laser SUNX M18-L…………………………………..……….53 Figura 24. Sensor M18-L operando……………………………………………...53 Figura 25. Estado NPN o PNP del sensor M18-L……………………….……..54 Figura 26. Microcontrolador PIC16F876A………………………………….......57 Figura 27. MCLR del microcontrolador…………………………………….....…58 Figura 28. Módulo NRF24L01 + PA + NLA…………………………………......60 Figura 29. IC del nRF24L01+………………………………………….………....60 Figura 30. Diagrama de bloques nRF24L01+………………………….…..…..61 Figura 31. Esquemático funcional nRF24L01+……………………..……….…61 viii.
(10) Figura 32. Descripción de Relé………………………………………………......64 Figura 33. Proceso de conversión y acondicionamiento de corriente DC….69 Figura 34. Letrero led RGB…………………………………………………….…70 Figura 35. Panel solar …………………………………………………………....72 Figura 36. Sistema de recolección de la energía solar…………………….…..72 Figura 37. Pilas y baterías……………………………………………………......76 Figura 38. Letrero de altura máxima………………………………………….....78 Figura 39. Altura de puente y altura de vehículo ………………………………78 Figura 40. Posicionamiento del sensor laser en la avenida o calle…………..79 Figura 41. Vehículo corta haz del sensor y envía una señal……………..…..79 Figura 42. Recepción de la señal de radiofrecuencia………………………....80 Figura 43. Periférico activado………………………………………………..…..80 Figura 45. Fuente de alimentación del sistema……………………………..….83 Figura 46. Circuito de acoplamiento de voltaje para el sensor M18-L…….…84 Figura 47. Circuito de reset para el MCU………………………………………..84 Figura 48. Circuito actuador del letrero led ………………………………..…....85 Figura 49. Puertos que controlaran el semáforo……………………….……….85 Figura 50. Circuito correspondiente a un color del semáforo………………….86 Figura 51. Esquemático del circuito transmisor…………………………..…….87 Figura 52. Esquemático del circuito receptor………………………………..….88 Figura 53. Esquemático del semáforo……………………………..…………....89 Figura 54. Esquemático del sensor Nrf24L01…………………………………..90 Figura 55. Transmisor del sistema…………………………………………..…..91 Figura 56. Receptor del sistema……………………………………………..…..92 Figura 57. Posición de actuadores…………………………………………..…102 Figura 58. Semáforo diseñado………………………………………………....105 Figura 59. Medición de calzada……………………………………………...…106 Figura 60. Transmisor en funcionamiento…………………………………….109 Figura 61. Estados de operatividad del semáforo ……………………………111 Figura 62. Sensor M18-L operando…………….…………………………..…112 Figura 63. Operatividad en conjunto del sistema…………………………..…113. ix.
(11) INTRODUCCIÓN. Los sistemas de control de altura máxima aplicados en los puentes peatonales y vehiculares en la actualidad en nuestro país solo están regulados por un letrero indicador, donde se hace mención de la altura del puente a cruzar y este letrero visual está colocado en la estructura del mismo puente, lo cual hace que si se diera un evento de algún vehículo que exceda la altura máxima permitida, el conductor de dicho vehículo no podría frenar oportunamente ocasionando un impacto en la parte superior del vehículo contra la infraestructura del puente a cruzar.. Es por esta situación que este tema está tomando cada vez más importancia en nuestra sociedad ya que en la actualidad el gran crecimiento demográfico que están empezando a sufrir las distintas ciudades de nuestro país se está viendo reflejando en la construcción de grandes corredores viales y estos a su vez conllevan a la construcción de puentes peatonales y vehiculares para de esta manera poder tener un tránsito mucho más fluido.. De la misma manera todo esto conlleva a que cada día no solo las unidades vehiculares pequeñas crucen bajo estos puentes, sino que se puede observar que estos puentes son atravesados por unidades vehiculares de carga con alturas mayores a estos puentes y en algunos casos están empezando a impactar de manera aparatosa con los puentes ocasionando daños físicos (vida humana) y psicológicos a los seres humanos y causando el deterioro de la infraestructura del puente y vehículo.. Es así que en este punto el presente proyecto toma un grado de importancia único como una alternativa de seguridad vial que está a la vanguardia de un problema emergente, al haber ya antecedentes de impactos contra puentes peatonales y vehiculares, aun no se ha tomado en cuenta regular o tratar de salvaguardar la vida humana en sus distintos aspectos. 1.
(12) De ahí nace la idea de introducir el presente proyecto de tesis el cual está dirigido específicamente a abordar esta problemática emergente en nuestra sociedad para poder mitigar y alertar de manera mucho más eficiente a cualquier tipo de vehículo de carga pesada cuya tolva exceda la altura máxima permitida o vehículo particular que lleve una carga extra que sobrepase la altura del puente a transitar.. 2.
(13) CAPITULO I. 1. PLANTEAMIENTO DEL PROBLEMA DE INVESTIGACION. 1.1.. PROBLEMA DE LA INVESTIGAÓN. 1.1.1. ENUNCIADO DEL PROBLEMA. Los sistemas de control utilizados en el sector de transportes, aplicados al ingreso de unidades vehiculares de carga cuyas tolvas excedan la altura máxima de aquellos puentes por los cuales estos vehículos vayan a transitar, solo se han venido regulando con letreros que indican la altura máxima del puente, estos letreros en muchas ocasiones no son tomados en cuenta por los conductores por algunos motivos comunes como estar mucho tiempo pendiente del volante, cansancio o fatiga, esto hace que el conductor haga caso omiso a este tipo de letreros que indican la altura del puente peatonal o vehicular por el que va a transitar y de esta manera incurren en aparatosos e impactantes accidentes vehiculares.. Figura 1: Vehículo impactando contra puente peatonal. Fuente: Internet.. En nuestro país, el actual crecimiento demográfico que están sufriendo todas las grandes ciudades por el crecimiento del transporte de grandes unidades. 3.
(14) vehiculares tanto del sector público como del sector privado que encierra de manera activa al sector minero ya que es una de las fuente más explotadas en nuestro país al ser un productor de primera línea en producción de metales, las unidades que se congregan en estos centros mineros tienen que ser transportadas por las vías regulares y en algunos casos están incurriendo en exceder la altura máxima para poder transitar libremente por estos puentes peatonales. y. vehiculares. causando. de. este. modo. grandes. congestionamientos vehiculares y en casos muy penosos accidentes mortales de vidas humanas.. En la figura 1 tomada de una fuente de internet podemos observar como un vehículo impacta aparatosamente contra un puente de transito de trenes causando de esta manera el deterioro del mismo y esto en su consecutiva ocurrencia puede traducirse en accidentes mortales a la vida humana y daños prolongados a la infraestructura del puente. La figura 2 muestra un impacto y el daño dejado a la infraestructura de un puente vehicular causado por un vehículo de carga pesada en nuestro país la referencia es tomada del noticiero de ATV Noticias y la ubicación es en la capital de nuestro país (Lima) el nombre del puente impactado es Puente Mamacona de la panamericananorte de nuestro país.. Figura 2: Consecuencias de impacto en el puente Mamacona Fuente: ATV Noticias. 4.
(15) 1.1.2. FORMULACIÓN DEL PROBLEMA Por qué razón no se ha tomado en cuenta en colocar un sistema de advertencia visual de mayor impacto de captación o recepción visual en los puentes peatonales o vehiculares, para poder advertir a los conductores de vehículos cuyas cargas o tolvas excedan la altura máxima permitida, para poder transitar de manera más segura en los puentes peatonales y vehiculares de los centros urbanos más poblados de nuestro país.. 1.2.. JUSTIFICACIÓN. El tema de un sistema de seguridad para evitar este tipo de problemas e incidencias en la sociedad aún no ha venido siendo abordado ni a nivel local, ni nacional; siendo por esta misma razón un tema que estará a la vanguardia de un problema ya emergente.. Desarrollar este proyecto sirve específicamente para evitar daños a la vida humana e infraestructura de los puentes viales y peatonales de la localidad regional o nacional mediante un sistema visual de mayor impacto para poder ser recepcionado, el cual detectará a un vehículo que no cumpla con la altura máxima permitida para poder circular por dicho puente, dando señales de advertencia visuales al conductor de dicho vehículo.. En la tabla 1 podemos observar un breve recuadro de algunos incidentes ocurridos en referencia a puentes peatonales y vehiculares a partir del año 2014 en adelante, con consecuencias que van desde el daño a la integridad física y psicológica hasta el deterioro de la infraestructura del mismo puente.. 5.
(16) Tabla 1: Accidentes relacionados a puentes peatonales y vehiculares. Fuente: Diario el Comercio.. Accidente. Fecha. Lugar. Consecuencia. Puente Mamacona. 19-abr-14. Lurín. Estructura. Puente Balta. 14-feb-15. Lima cercado. Daño Físico / Estructura. Puente Huánuco. 14-feb-15. Lima cercado. Daño Físico / Estructura. 1.3.. Puente Huánuco. 09-mar-15. Lima. Estructura. Puente Peatonal. 03-nov-15. Ate - Vitarte. Muerte / Estructura. Puente Peatonal. 21-feb-14. Surco. Estructura. TRABAJOS RELACIONADOS. Se realizó la investigación pertinente acerca del tema del control de altura a unidades vehiculares de carga aplicado a puentes peatonales y vehiculares, no hallando ninguna investigación registrada y documentada debidamente en la IEEE que nos pueda facilitar el estudio de este tema.. 1.4.. ALCANCE. El presente proyecto de tesis comprende: Definición de sistemas de control de altura máxima aplicado a puentes vehiculares y peatonales. Selección del adecuado sensor laser y microcontrolador de microchip para poder detectar la altura máxima de un vehicula a una distancia no menos de 100 metros.. 6.
(17) Diseño del hardware necesario para poder implementar el sistema de control de altura máxima para vehículos de carga pesada y vehículos cuya tolva exceda la altura máxima permitida en los puentes peatonales y vehiculares.. Diseño de integración de hardware necesario para poder implementar el sistema de control de altura máxima. Implementación del prototipo de sistema de control de altura máxima aplicado a puentes peatonales y vehiculares. Selección de materiales necesarios para la implementación del proyecto.. 7.
(18) 1.5.. OBJETIVOS. 1.5.1. OBJETIVO GENERAL. Diseñar y estructurar un sistema prototipo de advertencia para evitar el riesgo de impacto en puentes vehiculares o peatonales por vehículos que excedan la altura máxima permitida, mediante el diseño y construcción de un sistema de señalización visual de mayor captación y recepción para los puentes peatonales y vehiculares del país.. 1.5.2. OBJETIVOS ESPECÍFICO Proteger la integridad física y psicológica de los peatones o conductores que se vean inmersos en algún tipo de incidente vehicular causado por el exceso de altura de las unidades vehiculares que transitan bajo los puentes peatonales o vehiculares. Determinar las especificaciones del sistema de control que mejora el sistema de advertencia de ingreso a de vehículos cuya tolva o carga exceda la altura máxima permitida de un puente peatonal o vehicular. Seleccionar los equipos y elementos más adecuados para la realización del proyecto. Ejecutar a nivel físico la operatividad del sistema de control de altura. Integrar el hardware y software necesario para poder llevar a cabo el sistema entrelazándolo vía radio frecuencia (RF).. 8.
(19) Dar a conocer un nuevo y mejorado sistema se alerta y advertencia cuando se exceda la altura máxima, para poder transitar libremente bajo los puentes peatonales y vehiculares. Realizar el primer prototipo operativo de un sistema de control autónomo que determinara la altura de un vehículo para evitar incidentes que causen daños a la vida humana y daños a la infraestructura de los puentes peatonales y vehiculares dentro de nuestra sociedad.. 9.
(20) CAPITULO II. 2.. MARCO TEÓRICO. 2.1.. MARCO CONCEPTUAL. 2.1.1. SISTEMA DE CONTROL. Un sistema de control es un conjunto de dispositivos encargados de administrar, ordenar, dirigir o regular el comportamiento de otro sistema, con el fin de reducir las probabilidades de fallo y obtener los resultados deseados.. Según el autor Ricardo Hernández G. en su libro Introducción a los Sistemas de Control (2010): “Un sistema de control automático es una interconexión de elementos que forman una configuración denominada sistema, de tal manera que al arreglo resultante es capaz de controlarse por sí mismo”.. Un sistema de control está compuesto básicamente por 3 elementos generales: Proceso Instrumentación Equipos de control. En la figura 3 podemos observar el diagrama de bloques grafico en la cual interaccionan los 3 elementos del sistema de control.. 10.
(21) Figura 3: Diagrama de bloques de un sistema de control Fuente: Trigo R. Introducción a la Automatización Industrial. La señal de la variable de proceso que se quiera controlar se mide mediante un sensor. El sensor se conecta físicamente al transmisor, el cual capta la salida del sensor y la convierte en una señal lo suficientemente intensa como para transmitirla al controlador o receptor de dicha señal, El controlador programable recibe la señal, que está en relación con el estado de los actuadores, la compara con el valor que se desea y, según el resultado de la comparación, decide qué hacer con dicho valor poder mantener la variable del proceso en el valor deseado. Con base en la decisión, el controlador envía otra señal al elemento actuador, el cual, a su vez, actúa sobre la variable manipulada para lograr la regulación deseada sobre la variable controlada.. 2.1.2. COMUNICACIÓN POR RADIOFRECUENCIA (RF). La comunicación por radiofrecuencia (abreviado RF) también se denomina espectro de radiofrecuencia, es un término que se aplica a la porción menos energética del espectro electromagnético situada entre los 3 kilohercios (Khz) y 300 gigahercios (Ghz), es una forma de telecomunicación que se realiza a 11.
(22) través de ondas de radio u ondas hertzianas, la que a su vez está caracterizada por el movimiento de los campos eléctricos y campos magnéticos.. La comunicación es un concepto amplio que engloba a cualquier sistema de transferencia de información entre dos puntos. Los cuales son dominados transmisor (Tx) y receptor (Rx).. En nuestro caso la información está contenida en alguno de los parámetros (amplitud, frecuencia, desfase) de una señal eléctrica (tensión o corriente).. Los medios habituales de comunicación son: Cables eléctricos (par trenzado, cable coaxial, etc.) Ondas electromagnéticas (radio, enlace de microondas) Señales ópticas (infrarrojos). En la figura 4 podemos observar cómo se transmite la información mediante una transmisión radioeléctrica. Figura 4: Transmisión radioeléctrica Fuente: Fundación San Valero. 12.
(23) Dentro de las transmisiones radioeléctricas tenemos: Transmisión simplex. Transmisión semiduplex. Transmisión duplex.. El transmisor como su nombre lo indica es el dispositivo que se encarga de transmitir la información que se desea transmitir.. El transmisor electrónico de RF es un dispositivo que transmite información en forma de ondas electromagnéticas a grandes distancias atreves de la atmosfera, estas ondas son electromagnéticas y son transmitidas en el nivel de la radiofrecuencia es decir sólo se transmiten ondas electromagnéticas cuyas frecuencias entran en este rango, (3Hz,300GHz).. Por encima de los 300GHz y antes de la zona de frecuencia del infrarrojo, la atmosfera se comporta como un elemento opaco para estas ondas, es por eso que no existe transmisión en esa banda de frecuencias.. El transmisor en el sistema de comunicaciones electrónicas es el dispositivo que se encarga de generar la señal de información y transmitir este mensaje al receptor.. El transmisor en los sistemas de comunicaciones electrónicas tiene como principales misiones: Generar la señal portadora. Modular la señal portadora con el mensaje. Amplificar la señal modulada con el mensaje hasta el nivel deseado para lograr el alcance deseado con el receptor. Efectuar el filtrado de la señal modulada para después ser radiada por la antena.. 13.
(24) Los transmisores existen en dos tipos: Transmisor Homodino o de modulación directa. Transmisor Heterodino.. Sea cual sea el tipo de señal a transmitir ambos transmisores pueden encajar con el esquema mostrado en la figura 5 donde se muestra el diagrama de bloques de un transistor.. Figura 5: Diagrama de bloques de un transmisor Fuente: Universidad nacional Autónoma de México. El receptor a pesar de los avances de la televisión y la Internet, las comunicaciones por la radio siguen siendo el principal medio de divulgación de noticias, entretenimiento e información. Los receptores de radio siguen siendo el aparato electrodoméstico más difundido en todo el planeta. Mire a su alrededor y se dará cuenta que en su hogar u oficina hay por lo menos unos cinco o seis aparatos de este tipo en diferentes modelos y presentaciones.. Los receptores o aparatos de radio interceptan una señal de radio mediante la antena, la amplifican, la de modulan y luego reproducen la información obtenida con el fin de poder trabajar o analizar los datos recepcionados. Los distintos modelos difieren en la forma como procesan internamente la señal original y en los circuitos empleados para tales efectos.. 14.
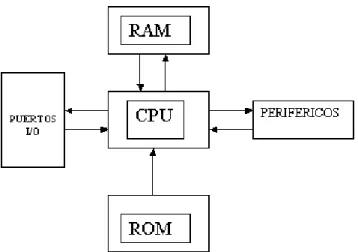
(25) Como pasaba en el caso del transmisor, también en el receptor existen dos tipos, y sea cual sea el tipo de señal a recibir ambos tipos de receptores pueden encajar con el esquema mostrado en la figura 6 donde se muestra el diagrama de bloques de un receptor.. Los receptores existen en dos tipos: Receptor Homodino. Receptor Heterodino.. Figura 6: Diagrama de bloques de un receptor Fuente: Universidad nacional Autónoma de México. 2.1.3. LOS MICROCONTROLADORES. Un microcontrolador (abreviado uc, UC o MCU) es un dispositivo electrónico de alto nivel de integración o circuito integrado (IC) programable, capaz de ejecutar las ordenes grabadas en su memoria. Está compuesta de varios bloques funcionales, los cuales cumplen una tarea específica. Un microcontrolador incluye en su interior las principales unidades funcionales de una computadora: unidad central de procesamiento (CPU), memoria (RAM y ROM) y periféricos de entrada y salida interconectadas dentro del microcontrolador. y. en. conjunto. forman. lo. que. se. conoce. como. microcomputadora. 15.
(26) En la figura 7 podemos observar el diagrama de bloques funcional que conforma un microcontrolador conjunto de unas flechas que indican como se intercomunican internamente.. Figura 7: Diagrama de bloques de un microcontrolador Fuente: USERS Microcontroladores. La mayoría de los microcontroladores por el año 1985 tenían dos variantes. Unos tenían una memoria EPROM reprogramable, significativamente más caros que la variante PROM que era sólo una vez programable. Para borrar la EPROM necesita exponer a la luz ultravioleta la tapa de cuarzo transparente. Los chips con todo opaco representaban un coste menor.. En 1993, el lanzamiento de la EEPROM en los microcontroladores (comenzando con el Microchip PIC16F84) permite borrarla eléctrica y rápidamente sin necesidad de un paquete costoso como se requiere en EPROM, lo que permite tanto la creación rápida de prototipos y la programación en el sistema. El mismo año, Atmel lanza el primer microcontrolador que utiliza memoria flash. Otras compañías rápidamente siguieron el ejemplo, con los dos tipos de memoria.. El costo se ha desplomado en el tiempo, con el más barato microcontrolador de 8 bits disponible por menos de 0,25 dólares para miles de unidades en 2009, y algunos microcontroladores de 32 bits a 1 dólar por cantidades 16.
(27) similares. En la actualidad los microcontroladores son baratos y fácilmente disponibles para los aficionados, con grandes comunidades en línea para ciertos procesadores.. En el futuro, la MRAM podría ser utilizada en microcontroladores, ya que tiene resistencia infinita y el coste de su oblea semiconductora es relativamente bajo.. Para la actualidad contamos con una amplia gama de familias de microcontroladores en sus distintas presentaciones y encapsulados los cuales pueden ir desde los chip convencionales de la serie 12 de Microchip hasta los de alta gama serie de 32 bit, a continuación se muestra la tabla 2 con un cuadro cronológico de la historia de los microcontroladores con sus distintas familias basadas en el número de bits con que trabajan, en este punto hay que tener claro que el conocimiento de los microcontroladores nos es fundamental ya que de esta manera se podrá elegir el más adecuado, para realizar la función específica para la que ha sido destinado.. 17.
(28) Tabla 2: Familias de Microcontroladores Fuente: Internet. 18.
(29) Actualmente los microcontroladores más populares y trabajados a nivel industrial son todos aquellos correspondiente a la familia Microchip por su versatilidad y por las distintas gamas que posee lo cual lo hace fácil de aplicar a distintos tipos de aplicaciones que van desde las más sencillas a las más complejas ya que su lista de instrucciones para poderlo programas va desde 35 instrucciones para la gama baja a 70 instrucciones para la gama alta.. Todas estas instrucciones son cortas y nada complejas de trabajar y se pueden hallar cada una de ellas según el microcontrolador PIC seleccionado, las instrucciones se pueden encontrar en la hoja de datos (datasheet) correspondiente del microcontrolador.. 2.1.3.1. . PROGRAMACIÓN DEL MICROCONTROLADOR. LENGUAJE DE MÁQUINA. Cada tipo de CPU entiende su propio lenguaje de máquina. Las instrucciones en lenguaje de máquina son números almacenados como bytes en memoria. Cada instrucción tiene su propio y único código llamado código de operación. Las instrucciones del procesador 80X86 varían en tamaño. El código de operación está siempre al inicio de la instrucción. Muchas instrucciones incluyen también datos (ver constantes o direcciones) usados por las instrucciones. El lenguaje de máquina es muy difícil de programar directamente. Descifrar el significado de las instrucciones codificadas numéricamente es tedioso para los humanos.. Por ejemplo, la instrucción para sumar los registros EAX y EBX y almacenar el resultado en EAX está codificada por los siguientes códigos hexadecimales 03 C3. Esto no es obvio. Afortunadamente, un programa llamado ensamblador puede hacer este aburrido trabajo para el programador.. 19.
(30) . LENGUAJE ENSAMBLADOR. Un programa Escrito en lenguaje ensamblador es almacenado como texto (tal como programas de alto nivel).. Cada instrucción representa exactamente una instrucción de la máquina. Por ejemplo, la instrucción de suma descrita arriba podría ser representada en lenguaje ensamblador como: add eax, ebx. Acá el significado de la instrucción es mucho más claro que el código de la máquina. La palabra add es el nemónico, nemónico para la instrucción de suma.. La forma general de una instrucción de ensamblaje es: nemónico operando(s).. Un ensamblador es un programa que lee un archivo de texto con instrucciones de ensamblador y convierte el ensamblador en código de máquina. Los compiladores son programas que hacen conversiones similares para lenguajes de programación de alto nivel.. Las instrucciones de un lenguaje de alto nivel son mucho más complejas y pueden requerir muchas instrucciones de máquina.. Otra diferencia importante entre los lenguajes ensamblador y de alto nivel es que debido a que cada tipo de CPU tiene su propio lenguaje de máquina, también tiene su propio lenguaje ensamblador. Trasladar programas entre arquitecturas de computador diferentes es mucho más difícil que en un lenguaje de alto nivel.. 2.1.3.2.. ESCRITURA DEL CÓDIGO FUENTE. El código fuente del lenguaje ensamblador está estructurado en columnas. Cualquier texto que comience en la primera columna se considerará una etiqueta y será parte del campo de etiquetas. Las siguientes tres columnas 20.
(31) contienen el campo de instrucciones, el campo de datos y el campo de comentarios. Los comentarios deben empezar con punto y coma (;) y pueden ir también en la primera columna, en la figura 8 se muestra cómo se lleva a cabo la secuencia para el grabado de un microcontrolador y en la figura 9 observamos un ejemplo en lenguaje ensamblador con los campos de etiquetas, instrucciones, datos y comentarios recuadrados para su clara distinción.. 21.
(32) Figura 8. Organigrama de la secuencia a seguir para el grabado del microcontrolador. Fuente: Microcontroladores PIC, José M. Angulo Usategui. 22.
(33) Figura 9. Listado del programa EJEMPLO1.ASM. Fuente: Practicas de Microcontroladores Ing. Wildor Ferrel Serruto.. 2.1.4. EL DIODO LÁSER. El diodo láser es un dispositivo semiconductor similar al led pero que bajo las condiciones adecuadas emite luz láser.. La palabra láser es un acrónimo de las palabras inglesas: Light Amplification by Stimulated Emisión of Radiation, es decir, amplificación de luz mediante emisión estimulada de radiación.. Realmente representa el nombre de un dispositivo cuántico, que sirve para generar ondas electromagnéticas de la gama óptica. Tiene un antecedente inmediato en el acrónimo máser, correspondiente a Microwave Amplification by Stimulated Emission of Radiation, con el que, en 1950, Townes, Gordon y Zeigev designaron el primer oscilador en la gama milimétrica construido por ellos.. 23.
(34) El láser proporciona una forma de emisión de radiación luminosa de características especiales. La radiación láser es monocromática (una sola longitud de onda), posee una gran direccionalidad (escasa divergencia) y puede concentrar un elevado número de fotones en fase en áreas muy pequeñas. Estas características han permitido una gran diversidad de aplicaciones en el campo de la tecnología actual, pasando sus aplicaciones desde el campo de la industria en concreto, hasta llegar a aplicaciones en la medicina en la que actualmente ha tomado una importancia muy considerable.. A partir de experiencias realizadas a principios de los setenta, se comenzó a observar que la irradiación láser de bajo nivel energético, sin llegar a producir efecto térmico, podía tener una acción estimulante sobre ciertos procesos biológicos, como la cicatrización o la resolución del edema y la inflamación. Esta modalidad «atérmica» de tratamiento constituye la laserterapia de baja intensidad o de baja potencia, de especial interés en medicina física, a la que se dedicará principalmente en nuestra actualidad.. Los Diodos láser, emiten luz por el principio de emisión estimulada, la cual surge cuando un fotón induce a un electrón que se encuentra en un estado excitado a pasar al estado de reposo, este proceso está acompañado con la emisión de un fotón, con la misma frecuencia y fase del fotón estimulante. Para que el número de fotones estimulados sea mayor que el de los emitidos de forma espontánea, para que se compensen las perdidas, y para que se incremente la pureza espectral, es necesario por un lado tener una fuerte inversión de portadores, la que se logra con una polarización directa de la unión, y por el otro una cavidad resonante, la cual posibilita tener una trayectoria de retroalimentación positiva facilitando que se emitan más fotones de forma estimulada y se seleccione ciertas longitudes de onda haciendo más angosto al espectro emitido.. La presencia de una inversión grande de portadores y las propiedades de la cavidad resonante hacen que las características de salida (potencia óptica 24.
(35) como función de la corriente de polarización) tenga un umbral a partir del cual se obtiene emisión estimulada, el cual es función de la temperatura.. Un diodo láser es diferente en este aspecto, ya que produce luz coherente lo que significa que todas las ondas luminosas están en fase entre sí. La idea básica de un diodo láser consiste en usar una cámara resonante con espejos que refuerza la emisión de ondas luminosas a la misma frecuencia y fase. A causa de esta resonancia, un diodo láser produce un haz de luz estrecho que es muy intenso, enfocado y puro.. El diodo láser también se conoce como láser semiconductor o también conocidos como láseres de inyección, Estos diodos pueden producir luz visible (roja, verde o azul) y luz invisible (infrarroja).. Para conocer mejor las características de los diodos láser a continuación en la tabla 3 hacemos una pequeña comparación tomando en cuenta las características principales de los diodos láser comparados con los diodos comunes y consideremos que los diodos láser son más recomendables como fuentes ópticas para sistemas de comunicación con grandes separaciones entre repetidores y altas velocidades de transmisión. Se puede lograr distancias de 100Km sin repetidores con velocidades de 1 GHz.. 25.
(36) Tabla 3: Diferencia entre diodo laser y diodo led Fuente: Isabel Arias T. “El láser la luz de nuestros tiempos”. LÁSER. LED. Más rápido. Mayor estabilidad térmica. Potencia de salida mayor. Menor potencia de salida, mayor tiempo de vida. Emisión coherente de luz. Emisión incoherente. Construcción es más compleja. Más económico. Actúan como fuentes adecuadas en sistemas de telecomunicaciones Modulación a altas velocidades, hasta GHz. Se acoplan a fibras ópticas en distancias cortas de transmisión. Velocidad de modulación hasta 200MHz. La emisión de luz en un diodo laser consigue realizar un guiado de la luz preferencial en una sola dirección, en la figura 10 se muestra la emisión fotónica de un diodo láser y se puede observar claramente como esta emisión de luz es concentrada en una sola dirección a diferencia de un led que su emisión fotónica es dispersa.. Figura 10: Emisión fotónica de un diodo laser Fuente: Internet. La emisión de luz láser es monocromática, los fotones emitidos por un láser poseen longitudes de onda muy cercanas entre sí. En cambio, en la luz emitida por diodos LED, existen fotones con mayores dispersiones en cuanto a las longitudes de onda.. 26.
(37) En la figura 11 podemos observar claramente los espectros emitidos al lado izquierdo se muestra el espectro emitido por un led y al lado derecho podemos observar el espectro que emite un diodo laser.. Con el láser se pueden conseguir rayos de luz monocromática dirigidos en una dirección determinada. Como además también puede controlarse la potencia emitida, el láser resulta un dispositivo ideal para aquellas operaciones en las que sea necesario entregar energía con precisión o enfocada solo en un punto fijo.. Un diodo láser requiere de una fuente de alimentación de 100 a 200 mW. Se les hizo funcionar primero en el modo de pulsos en 1962. Luego se usaron en operación en onda continua (OC) en los años setentas.. Los diodos láser han tenido uso extenso uso como emisores en comunicación por fibras ópticas de alcance corto y largo, y como sensores en los reproductores de discos de compactos (DC). Los diodos láser se modulan con facilidad, conmutando la corriente de entrada a conectado y desconectado. Los diodos láser de un solo modo son capaces de emitir de 20 a 50 mW, tienen demanda para grabación óptica, impresión a alta velocidad, sistemas de distribución de datos, transmisión de datos, comunicaciones espaciales entre satélites en órbita, aplicaciones industriales y médicas.. Figura 11: Espectro de emisión de un led y un laser Fuente: Isabel Arias T. “El láser la luz de nuestros tiempos”. 27.
(38) 2.1.4.1.. DIODO LÁSER DE ESTADO SOLIDO. El funcionamiento del diodo láser lo determinan su composición química y su geometría.. Todos los diodos son, en esencia, estructuras de varias capas, formadas por varios tipos diferentes de material semiconductor. Los materiales son contaminados con impurezas por medio de químicos, para darles ya sea un exceso de electrones (Tipo N) o un exceso de vacantes de electrones (Tipo P).. Los diodos láser que emiten en la región 0.78 a 0.9 micrón, están formados por capas de arseniuro de galio (GaAs) y arseniuro de aluminio y galio (ALGaAs) desarrollado sobre un subestrato de GaAs. Los dispositivos para longitud de onda mayor, que emiten a 1.3 a 1.67 micrones, se fabrican con capas de arseniuro fosfuro de indio y galio (InGaASP) y fosfuro de indio (InP), desarrollado sobre un subestrato de InP.. Figura 12: Diodo laser de estado solido Fuente: Isabel Arias T. “El láser la luz de nuestros tiempos”. 28.
(39) La ilustración de la figura 12 muestra las características estructurales comunes a todos los diodos láser de onda continua (OC). La base del diodo es un subestrato formado por GaAs o InP, tipo N, con alta impurificación. Sobre la parte superior del subestrato, y a manera de descubrimiento, se desarrolla una capa plana más ligera del mismo material, Tipo N y con impurificación. Sobre la capa de recubrimiento tipo N se desarrolla una capa activa de semiconductor (AlGaAs o InGaAsP) sin impurificaciones. Después, sobre la capa activa de tipo P, con alto grado de impurificación.. Cuando pasa la corriente por los contactos metálicos los electrones inyectados desde la capa tipo N y los huecos inyectados desde la capa tipo P se recombinan en el área activa delgada, y emiten luz. La luz viaja hacia atrás y hacia delante entre las facetas parcialmente reflejantes de los extremos del diodo. La acción lasérica comienza al incrementarse la corriente. La ganancia óptica en viaje redondo debe superar las pérdidas debidas a absorción y dispersión que se dan en la capa activa, para sostener dicha acción.. Muchos diodos láser tienen una capa delgada de óxido, depositada sobre la parte superior de la capa de cubierta final tipo P. En esta capa de óxido se hace un ataque químico de manera que pueda formarse una cinta metálica de contacto en receso de poca profundidad, longitudinalmente a lo largo de la superficie superior del diodo. El índice de refracción de la capa activa es mayor que el del material tipo P y del material tipo N (las capas de recubrimiento) que están arriba y abajo de ésta. Como resultado, la luz es atrapada en una guía dieléctrica de ondas formada por las dos capas de recubrimiento y la capa activa, y se propaga en ambas, la capa activa y las de recubrimiento.. El haz de luz que emerge del diodo láser forma una elipse vertical (en sección transversal), aunque la región lasérica es una elipse horizontal. La luz que se propaga dentro del diodo, se extiende hacia afuera en forma transversal (verticalmente) desde las capas de recubrimiento superior e inferior.. 29.
(40) Cuando el diodo está funcionando en el modo fundamental, el perfil de intensidad de su haz emitido en el plano transversal, es una curva de Gauss de forma acampanada.. En el láser se amplifica la luz al viajar hacia atrás y hacia adelante en la dirección longitudinal, entre las facetas de cristal de cada extremo del diodo. Los modos resonantes que se extienden en dirección perpendicular a la unión PN, se llaman modos transversales. La inyección de electrones y huecos en la capa activa situada abajo de la cinta metálica de contacto, altera el índice de refracción de la capa activa, y confina la luz lateralmente para que no se disperse hacia afuera, hacia ambos lados del centro de la capa activa.. 2.2.. OPERACIÓN DEL SOFTWARE. 2.2.1. CADSOFT EAGLE PCB DESIGN. El Cadsoft Eagle PCB Design es una de las herramientas más populares en el mundo del diseño electrónico, la cual nos facilita el diseño de los esquemáticos de los circuitos electrónicos y una vez finalizado este esquemático nos da la posibilidad de poder realizar el trazado de las rutas para poder realizar el soldado físico de los distintos componentes que están inmersos en el diseño de un circuito electrónico.. Esta herramienta de diseño tiene una gran versatilidad ya que no solo nos permite realizar los planos de un circuito electrónico y el respectivo board, si no está nos permite ir personalizando y crear nuevas librerías para componentes electrónicos que se requieran estar integrando a una tarjeta electrónica y de no existir el diseño de la misma el Eagle PCB design nos facilitara la tarea de poder crear la librería y agregarla dentro de la librería general pasando a formar parte de nuestro software de diseño.. 30.
(41) 2.2.1.1.. CARACTERÍSTICAS CADSOFT EAGLE PCB DESIGN. Las características que esta herramienta de diseño nos presenta son: . GENERAL. Área máxima de dibujo 1.625 x 1.625 mm (64 x 64 pulgadas). Resolución 1/10.000 mm (0.1 micras). Rejilla en mm o en pulgadas. Hasta 255 capas a colores definidos por el usuario. Ficheros de comando (ficheros Script). Lenguaje de usuario similar al C para la importación y exportación de datos. Edición de librerías sencilla. Visor de librerías con potentes funciones de búsqueda. Distinción entre las características de una misma familia (p. e. 74L00, 74LS00). Generación de gráficos de salida, así como fabricación y pruebas con el procesador CAM o mediante el lenguaje propio del usuario. Listado por impresora vía controladores del SO. Generación de listado de componentes con soporte de base de datos. Funciones Arrastrar (Drag) y Colocar (Drop) en el Panel de Control. Función automática de copias de seguridad. . EDITOR DE PLACAS. Soporte completo en SMD. Soporte completo en multicapas (16 capas de señales). Comprobación de las reglas de diseño para placas (p. e. traslapas, medidas de pistas o líneas de conexión). Conductores de cobre (para conexión a masa). Soporte en variedad de encapsulados. 31.
(42) . MODULO ESQUEMÁTICO. Hasta 99 hojas por esquema. Posibilidad de trabajar alternativamente con el esquema y con la placa. Generación automática de la placa. Generación automática de las señales de alimentación. Verificación Eléctrica (se verifican errores entre los esquemas eléctricos y de líneas de conexión). . MODULO AUTORUTER. Totalmente integrado en el programa básico. Utilización de las Reglas de Diseño de líneas de conexión. Cambio del modo manual al automático en cualquier instante. Algoritmo ripup&retry. Estrategia de los factores de costo definida por el usuario. Rejilla de dibujo mínima de 0,02 mm. Sin restricciones de posicionado. Hasta 16 capas de señales (con direcciones preferidas definibles por el usuario). Hasta 14 capas con alimentación. Toma en consideración de los distintos tipos de señales (ancho de línea de conexión, distancias mínimas). . EDICIÓN ESTÁNDAR. En la Edición Estándar de esquemas se aplican las siguientes restricciones: El área del esquema se restringe a un máximo de 160 x 100 mm. (alrededor de 6,3 x 3,9 pulgadas). Fuera de esta área no es posible situar encapsulados ni dibujar señales. 32.
(43) Se permiten un número máximo de 4 capas (superior, inferior y 2 capas internas).. . EDICIÓN LIBRE (FREEWARE). En la Edición Reducida de EAGLE, disponible como Freeware (para prueba y evaluación), se aplican las siguientes restricciones: El área de la placa está restringida a 100 x 80 mm. (alrededor de 3,9 x 3,2 pulgadas). Fuera de esta área no es posible situar encapsulados ni dibujar señales. Sólo se pueden usar dos capas (no hay capas internas). Un esquema sólo puede tener una hoja.. Los esquemas más grandes se pueden imprimir con ediciones menores. El procesador CAM puede también generar la elaboración de datos.. 2.2.1.2.. PERSONALIZACIÓN DE EAGLE. A parte de la instalación básica, EAGLE permite al usuario personalizar ciertos aspectos del programa, tales como la configuración de menús, teclas de función o colores de pantalla. Muchas de estos aspectos se pueden realizar desde el menú Options en el Panel de Control o en un editor de ventanas.. En el fichero especial de comandos (fichero script) eagle.scr contiene los valores para los esquemas eléctricos, de líneas de conexión y el editor de librerías que pueden añadirse en el modo de comandos de EAGLE. Los usuarios que les atraiga esta posibilidad deberían familiarizarse con el lenguaje de comandos de EAGLE. La sintaxis de los comandos se describe en la ayuda de EAGLE.. 33.
(44) El interfaz de usuario se puede personalizar mediante un clic en Options/User interface en el menú del Panel de Control. Este tutorial da por supuesto que se utilizarán las configuraciones por defecto.. La información adicional respecto a la configuración se puede encontrar en la función de ayuda. Vea los apartados SET, ASSIGN, User Interface, CHANGE y Project.. 2.2.1.3.. EL CONCEPTO USER INTERFACE DE EAGLE. EAGLE se ha diseñado de tal modo que cualquier acción se inicia con una cadena de comando. Normalmente el usuario activa estos comandos mediante clics en las opciones del menú o en los iconos de la barra de herramientas. Los valores son almacenados normalmente en campos apropiados.. Para utilizar EAGLE no es necesario conocer el lenguaje de comandos. Sin embargo, este concepto proporciona al programa una herramienta muy potente y flexible.. Cualquier comando, por ejemplo, puede introducirse en formato texto mediante una línea de comando o puede ser leído desde un fichero. Además, las cadenas de comando se pueden asignar individualmente a teclas de función (comando ASSIGN). Esto permite al usuario por ejemplo ejecutar secuencias de comando pulsando una tecla o mediante unos clics con el ratón (vea comando SCRIPT).. 2.2.1.4.. PANEL DE CONTROL. Al iniciar EAGLE aparecerá el Panel de Control desde donde se podrán abrir y guardar proyectos, así como configurar distintos parámetros del programa.. 34.
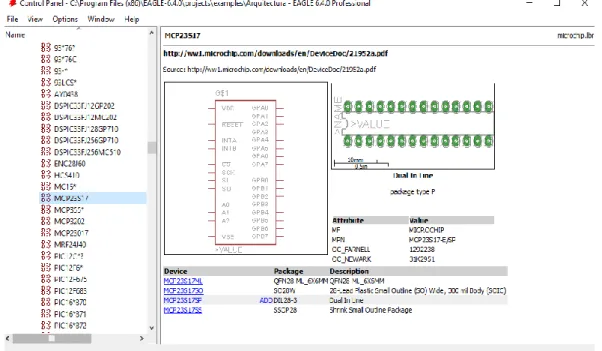
(45) La vista en estructura de árbol permite una rápida visión de las librerías de EAGLE. Con un doble clic el contenido de la librería se ramifica de modo que pueden verse todos sus componentes. La selección de uno de ellos nos muestra a la derecha una breve descripción del mismo.. En la figura 13 podemos observar como se muestra el panel de control detallando un chip de la familia de microchip, nótese que en la parte superior nos indica la versión del Eagle utilizado, cada versión de Eagle presenta un panel de control de similar manera.. Figura 13: Panel de control Eagle V6.4 Fuente: Eagle V6.4. Aquí se pueden observar las descripciones del programa en el lenguaje del usuario, ficheros Script, y trabajos CAM. Pruebe a seleccionar varias entradas. A la derecha obtendrá la correspondiente descripción.. El Panel de Control Panel soporta las opciones Desplazar y Colocar (Drag&Drop). Un clic en el botón derecho del ratón hace aparecer un menú contextual con opciones tales como imprimir (print), abrir (open), copiar (copy), etc. 35.
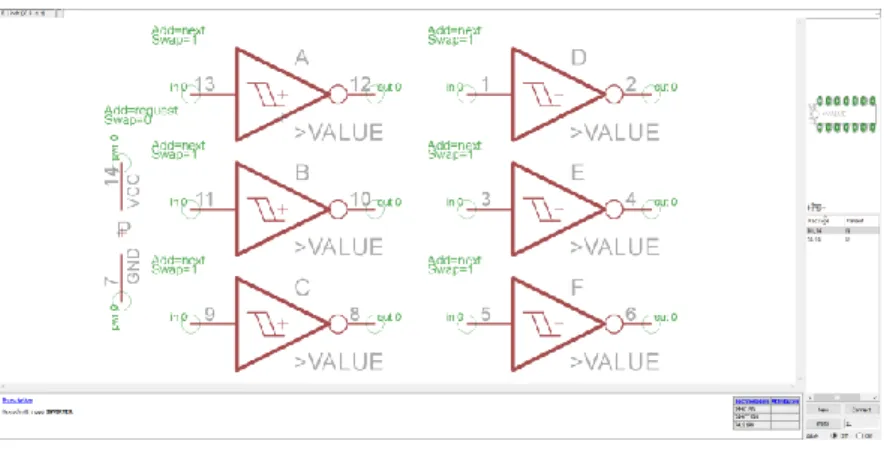
(46) 2.2.1.5.. LIBRERÍAS. Los componentes que agrega a los esquemas y a las placas están almacenados en librerías.. El Editor de Librerías tiene la misma interfaz de usuario que el Editor de Esquemas y el Editor de Placas. Por lo tanto, sólo tiene que conocer unos comandos adicionales para la creación de sus propios componentes.. Una librería normalmente consiste en tres elementos básicos, los cuales observamos en las siguientes figuras 14, 15 y 16 respectivamente: Package (encapsulado): la silueta de colocación en la placa. Figura 14: Package Fuente: Eagle V6.4. Symbol (símbolo): el dibujo para el esquema eléctrico. Figura 15: Symbol Fuente: Eagle V6.4. 36.
(47) Device (componente): el componente verdadero, consiste en el símbolo y el encapsulado.. Figura 16: Device Fuente: Eagle V6.4. 37.
(48) 2.2.1.6.. SCHEMATIC. Al realizar el esquema electrónico de cualquier tipo de circuito se tendrá como resultado un esquemático que es representado en la figura 17 la cual muestra a detalle cual es el resultado que se obtendrá.. Figura 17: Schematic (circuito electrónico) Fuente: Eagle V6.4. 38.
(49) 2.2.1.7.. BOARD. Al finalizar el esquemático respectivo del circuito electrónico se puede pasar a obtener la tarjeta electrónica respectiva o más conocida como BOARD la cual se puede observar en la figura 18.. Figura 18: Board (tarjeta electrónica con los componentes seleccionados) Fuente: Eagle V6.4. 39.
(50) 2.2.2. CCS COMPILERS. El CCS Compilers es una potente herramienta de programación en lenguaje C el cual ha sido desarrollado para realizar la programación de los microcontroladores PIC, llegando a ser llamado PIC C Compiler.. PIC C Compiler es un inteligente y muy optimizado compilador C que contienen operadores estándar del lenguaje C y funciones incorporados en bibliotecas que son específicas a los registros de PIC, proporcionando a los desarrolladores una herramienta poderosa para el acceso al hardware las funciones del dispositivo desde el nivel de lenguaje C.. El compilador CCS contiene más de 307 funciones integradas que simplifiquen el acceso al hardware.. 2.2.2.1.. CARACTERÍSTICAS PRINCIPALES. Al compilar genera un código máquina muy compacto y eficiente. Se integra perfectamente con MPLAB y otros simuladores/emuladores como PROTEUS para el proceso de depuración. Incluye una biblioteca muy completa de funciones precompiladas para el acceso al hardware de los dispositivos (entrada/salida, temporizaciones, conversor A/D, transmisión RS-232, bus I2C…, etc). Incorpora drivers para dispositivos externos, tales como pantallas LCD, teclados numéricos, memorias EEPROM, conversores A/D, relojes en tiempo real, etc. (los drivers son pequeños programas que sirven de interfaz entre los dispositivos hardware y nuestro programa). Permite insertar partes de código directamente en Ensamblador, manteniendo otras partes del programa en C.. 40.
(51) 2.2.2.2.. FUNCIONES PRECOMPILADAS. Se puede facilitar considerablemente la tarea de programación si no es necesario construir por nosotros mismos aquellas funciones que son de utilización más frecuente, como leer la entrada de un teclado o imprimir un determinado mensaje en una pantalla LCD conectada como salida.. Existen funciones en C incluidas en el compilador PCW para manejar los diferentes recursos del microcontrolador, desde el bus I2C hasta el conversor A/D.. 2.2.2.3.. UTILIDADES ADICIONALES. El entorno PCW incluye, además del IDE y del compilador, una serie de utilidades adicionales con las que se amplían las posibilidades de éste, y que se encuentran en los menús View y Tools de la barra de menús, veamos algunas de ellas: Monitor del puerto serie: Consiste en un terminal que monitoriza la entrada y la salida del puerto serie del computador. Selección de dispositivos (Device Selection Tool): Esta utilidad consta de una base de datos con los dispositivos que puede programar el compilador, incluyendo todas sus características hardware, de manera que se puede emplear para buscar aquellos dispositivos que cumplan una serie de propiedades comunes. Editor de dispositivos (Device Editor): Este programa también emplea la base de datos de dispositivos, y permite editar los componentes para modificar sus características hardware, así como añadir nuevos dispositivos o eliminar algunos de ellos.. 41.
(52) Conversor numérico: Esta utilidad realiza conversiones entre los tipos de datos unsigned, signed, hex y float. Extracción de datos de calibrado: Esta opción permite leer los datos de calibración existentes en la memoria de programa de un determinado dispositivo. Estos datos contienen información particular de cada microcontrolador a su salida de fábrica, y se refieren a posibles problemas especiales que pudieran haber tenido lugar durante el desarrollo y fabricación. Mediante esta opción es posible leer estos datos y grabarlos en un fichero .H o .C que incorporará una directiva #ROM para dicho dispositivo, con lo que cada vez que se programe el microcontrolador se incluirán estos datos de calibrado. Desensamblador: Esta opción lee un fichero en Código máquina y lo traduce a su equivalente en Ensamblador, con lo que se podría insertar este código en un programa en C, mediante las directivas #ASM y #ENDASM.. Puede que haya alguna herramienta de más o de menos, eso dependerá de la versión de compilador que estemos utilizando. Ahora vamos a ver alunas consideraciones a tener en cuenta cuando vayamos a programar:. Hemos visto cómo hacer algunos ejemplos en C durante el transcurso de estudio de los microcontroladores (la verdad es que pocos de momento embarazosos), pero no hemos visto nada sobre aspectos de optimización de los programas. La optimización suele ser necesaria en muchas ocasiones, puesto que la memoria del microcontrolador es un recurso escaso, y puede ocurrir que un programa que en un principio ocupa una cantidad de memoria mayor que la disponible, tras una optimización del código reduzca su tamaño. 42.
(53) de manera que sí pueda programarse. A continuación, se indican algunas de las características que incorpora el compilador sobre este aspecto: Inserción de código Ensamblador: Mediante las directivas #ASM y #ENDASM es posible insertar código Ensamblador directamente en el código C, con lo que determinados procedimientos se pueden implementar directamente en Ensamblador, con el ahorro de código y tiempo de ejecución que ello implica. Gestión automática de páginas de código: los microcontroladores PIC disponen de varias páginas de memoria de programa, lo que en la programación manual supone tener en cuenta si los saltos se producen a otra página de código diferente de la activa, y modificar las páginas de código según corresponda, (y si no que se lo digan a los que programan en Ensamblador). Este aspecto es gestionado de manera automática por el compilador, el cual, de manera transparente al usuario, insertará las instrucciones necesarias para el cambio de página de código. Además, durante el proceso de enlazado se analiza el código objeto, de manera que aquellas funciones que son llamadas frecuentemente son situadas en la misma página de código que la función que las llama, disminuyendo de este modo el tamaño del código y el retardo producido por la llamada a la función. Gestión automática de bancos de memoria: El compilador también gestiona de manera automática el cambio entre bancos de memoria RAM, y trata de minimizar el cambio entre bancos, intentando agrupar las variables locales utilizadas en cada función dentro de un mismo banco. Mapeo de la memoria del microcontrolador desde el código C: Las directivas #BIT y #BYTE permiten asignar variables del código C a determinadas direcciones de la memoria del microcontrolador, evitando de. 43.
(54) este modo que el compilador asigne automáticamente variables a zonas de memoria que interesa mantener libres. Esta característica también se puede realizar con otros tipos de datos, como las estructuras. Mapeo de tipos de datos de tamaño bit: El compilador permite utilizar datos de tamaño 1, 8 y 16 bits, y 32 bits en notación de coma flotante. De estos datos, especial interés tienen los datos de tamaño 1 bit (tipo Short Int), que permite utilizar de manera muy eficiente la memoria del microcontrolador. Por ejemplo, en lugar de utilizar una variable de tipo #BYTE para implementar un indicador o flag, es posible utilizar una variable de tipo #BIT, con lo que la memoria ocupada es menor y el código relacionado con esta variable se optimiza. Además, las estructuras y uniones también permiten definir campos de bits, optimizando el almacenamiento de información de estos tipos de datos. Almacenamiento de constantes en memoria de programa: Los tipos de datos constantes, las cadenas de texto y las matrices o arrays son almacenados en la memoria de programa del microcontrolador, en lugar de en la memoria de datos. Como consecuencia, y debido a la arquitectura Harvard de los PIC, en la que los segmentos de memoria de programa y datos son independientes, no es posible tratar las zonas de memoria de programa como datos, por lo que no se permite el empleo de punteros a arrays de constantes, ni tampoco a funciones, una nota a tener en cuenta para los que saben programar en C, pero desconocen las características de este compilador. Soporte de punteros y referencias: El compilador PCW permite el uso de punteros de 8 y 16 bits. Además, también permite el paso de parámetros por referencia de variables, lo que proporciona la misma potencia que los punteros, mejorando al mismo tiempo la legibilidad del código (esto lo veremos con ejemplos en el curso de C).. 44.
Figure



+7




Documento similar