Control del módulo Pendubot utilizando una FPGA
Texto completo
Figure
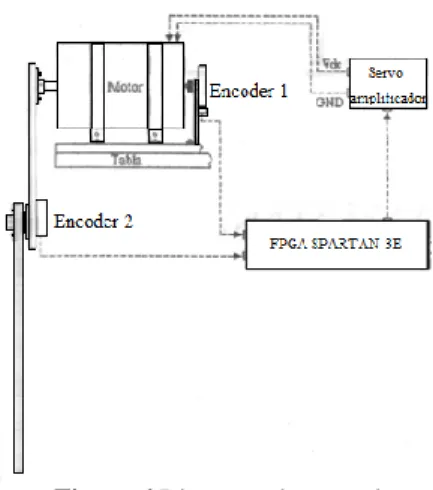
![Figura 1 Pendubot [6]](https://thumb-us.123doks.com/thumbv2/123dok_es/2733398.540041/1.892.551.745.758.989/figura-pendubot.webp)
![Figura 5 Spartan-3E de Xilinx [9]](https://thumb-us.123doks.com/thumbv2/123dok_es/2733398.540041/2.892.184.345.556.756/figura-spartan-e-de-xilinx.webp)
![Figura 10 Lógica del FPGA y LABVIEW [15]](https://thumb-us.123doks.com/thumbv2/123dok_es/2733398.540041/6.892.499.782.488.727/figura-lógica-fpga-labview.webp)
Documento similar
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Este capítulo epistemológico se inicia con la definición de feminismo como movimiento social y generador de teoría crítica, para tratar, después, las discusiones contemporáneas
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
En las etapas iniciales del proyecto se diseñó un sistema del control basado en un control remoto como forma de manejar todo lo que relaciona a la cama inteligente, pero esta idea
Además, en este capítulo, se detalla el trabajo realizado tanto en Windows XP, con el uso de la herramienta facilitada por Schunk para controlar los motores, como en Linux, con la
En principio, un sistema se puede controlar directamente observando s´olo la planta, sin necesidad de modificar la acci´on de control a trav´es de la observaci´on de las
The closed loop poles movement study is traduced to prediction horizon, control horizon, weighting factor and sample time parameters. This yields to some rules to be followed
