UNIVERSIDAD DE CANTABRIA
Trabajo Fin de Grado
INSTRUMENTACIÓN DEL MODELO A
ESCALA DE UN REMOLCADOR DE ALTURA
PARA ENSAYOS ESTÁTICOS Y DINÁMICOS
Instrumentation of an In-scale Model of a
Seagoing Tugboat for Static and Dynamic
Tests
Para acceder al Título de Grado en
INGENIERÍA MARINA
Autor: PABLO MARAÑÓN MARTÍN
27/06/2014
ÍNDICE
1. INTRODUCCIÓN Pág. 06
1.1. Objetivo Pág. 06
1.2. Motivación para el desarrollo del TFG Pág. 06
2. DESCRIPCIÓN DEL REMOLCADOR Y SU
INSTRUMENTACIÓN
Pág. 07
2.1. Datos del buque real y el modelo Pág. 07
2.2. Instrumentación y componentes Pág. 08
2.2.1. IMU(Unidad de Medición Inercial)+AHRS Pág. 08 2.2.2. Sistema de Posicionamiento Global (GPS) Pág. 09 2.2.3. Controlador digital de conmutación electrónica
para la regulación de la velocidad de los motores.
Pág. 10
2.2.4. Motores de conmutación electrónica Pág. 11
2.2.5. Reductoras Pág. 12
2.2.6. Acoplamientos Pág. 12
2.2.7. Hélices de 4 palas Pág. 13
2.2.8. Tarjeta de adquisición de datos Pág. 14
2.2.9. Servomotores de gobierno del buque Pág. 14
2.2.10. Circuito PWM para el control de los servomotores
Pág. 16
2.2.11. Circuito con operacionales LM741 para controlar los variadores de los motores
Pág. 16
2.2.12. Fuente de alimentación Pág. 18
2.2.13. Baterías de alimentación12 voltios Pág. 18
2.2.14. Disyuntores magnetotérmicos Pág. 19
2.2.15. Router inalámbrico Pág. 19
2.2.16. PC portátil Pág. 20
2.2.17. Cajas estancas Pág. 20
2.3. Circuito eléctrico y conexiones Pág. 21
2.4. Redistribución de pesos Pág. 26
3. LA NORMA NMEA 0183 Pág. 28
5. CONTROL DE LA PROPULSIÓN Pág. 33 6. ELEMENTOS NECESARIOS PARA LA REALIZACIÓN
DE ENSAYOS Y PRUEBAS DE MAR
Pág. 34
6.1. Sistema software de comunicaciones, adquisición de datos y comunicaciones, y control mediante LabVIEW
Pág. 35
6.2. Diagrama de bloques en LabView Pág. 40
7. ENSAYOS Y PRUEBAS DE MAR Pág. 41
7.1. Ensayos estáticos Pág. 41
7.1.1. Mesa de momentos de inercia Pág. 41
7.2. Ensayos dinámicos Pág. 44
7.2.1. Curva de evolución Pág. 45
7.2.2. Maniobra de Zig-Zag de Kempft Pág. 48
7.2.3. Maniobra de Pull-out Pág. 50
7.2.4. Maniobra en espiral directa e inversa Pág. 51 7.2.4.1. Maniobra en espiral directa de
Dieudonné
Pág. 51
7.2.4.2. Maniobra en espiral inversa de Bech Pág. 53
8. MANTENIMIENTO Pág. 54
9. CONCLUSIONES Pág. 60
10. PRESUPUESTO DE MATERIALES Pág. 61
11. BIBLIOGRAFÍA Pág. 62
12. ANEXOS Pág. 65
Anexo 1: UMI IG-500E-G4A2P1-S Pág. 66
Anexo 2: GPS Receiver board RCB-LJ Pág. 70
Anexo 3: Maxon motor control amplifier 4-Q-EC- DEC 70/10 Pág. 78
Anexo 4: Maxon Motor EC-45 250W -136210 Pág. 80
Anexo 5: Maxon Gearhead GP 42 C -203115 12:1 Pág. 81
Anexo 6: Acoplamiento Tecnopower tipo MKA Pág. 84
Anexo 7: Hélices Raboesch 4 blade type A-14731-14732 Pág. 85
Anexo 8: DAQ National Instruments USB-6008 Pág. 87
Anexo 9: Servos Cyclone CY 130005 Pág. 92
Anexo 10: PWM Simple Servo versión 1V2 Pág. 93
ÍNDICE DE FIGURAS
Fig.01: Marco de coordenadas inercial Pág. 08
Fig.02: GPS: circuito e instalación en caja estanca. Pág. 10 Fig.03: Controlador digital de conmutación electrónica
MAXON para la regulación de velocidad de los motores.
Pág. 10
Fig.04: Variadores y tarjetas de adquisición en el interior de la caja estanca
Pág. 11
Fig.05: Motor de conmutación electrónica y reductor de engranajes.
Pág. 12
Fig.06: Acoplamiento de aluminio de alta resistencia con fuelle de acero inoxidable instalado en el modelo del remolcador.
Pág. 13
Fig.07: Hélices de latón de 4 palas. Pág. 14
Fig.08: Tarjeta de adquisición de datos NI USB-6008 Pág. 14
Fig.09: Toberas tipo KORT Pág. 15
Fig.10: Servomotor de gobierno del buque y ángulo de recorrido del brazo.
Pág. 15
Fig.11: PWM de control del servomotor Pág. 16
Fig.12: Amplificador operacional UA741CN Pág. 17
Fig.13: Esquema del circuito con amplificadores operacionales 741 modo inversor y no inversor.
Pág. 17
Fig.14: Fotografía del circuito con amplificadores operacionales 741 modo inversor y no inversor.
Pág. 17
Fig.15: Fuente de alimentación convertidor 12V-5V Pág. 18
Fig.16: Baterías de alimentación de 12 voltios. Pág. 19
Fig.17: Disyuntores magnetotérmicos de 2 polos. Pág. 19
Fig.18: Router WIFI Pág. 20
Fig.19: Circuito eléctrico del modelo a escala del remolcador. Pág. 22
Anexo 12: Fuente de alimentación 25W SD-25A-5 Pág. 106
Anexo 13: Baterías DJW12-7.0(12V7.0AH) Pág. 108
Anexo 14: Disyuntores magnetotérmicos Merlin Gerin C60N Pág. 109
Fig.20: Circuito PWM del servomotor y sus conexiones Pág. 24
Fig.21: Circuito y conexiones del AO LM741 Pág. 25
Fig.22: Operación de pesado del remolcador. Pág. 26
Fig.23: Mandos de control de escala y calibrado DC-5C Pág. 26
Fig.24: Ejemplo de formato NMEA 0183 Pág. 29
Fig.25: Variables que definen el movimiento del modelo físico Pág. 30
Fig.26: Marco de referencia inercial Pág. 31
Fig.27: Sistemas de coordenadas inerciales Pág. 32
Fig.28: Representación gráfica de los 6 grados de libertad de movimiento del buque
Pág. 33
Fig.29: Diagrama de control de propulsión Pág. 33
Fig.30: Diagrama de elementos necesarios para la realización de los ensayos.
Pág. 34
Fig.31: Panel de control de la propulsión Pág. 37
Fig.32: Gráfica de la Unidad de Medición Inercial representada con LabVIEW
Pág. 38
Fig.33: Diagrama de funcionamiento del programa Pág. 39
Fig.34: Diagrama de bloques en LabVIEW Pág. 40
Fig.35: Esquema de la mesa de inercias Pág. 41
Fig.36: Distancias fundamentales del buque Pág. 42
Fig.37: Esquema de colocación de pesos Pág. 42
Fig.38: Representación de la curva de evolución, fases y parámetros característicos.
Pág. 47
Fig.39: Representación de las velocidades y aceleraciones transversales y angulares de la curva de evolución.
Pág. 47
Fig.40: Gráfica de la maniobra de zig-zag Pág. 49
Fig.41: Representación gráfica de la maniobra de Pull-out Pág. 51 Fig.42: Representación gráfica de la maniobra en espiral
directa de un buque estable
Pág. 52
Fig.43: Representación gráfica de las maniobras en espiral directa e inversa de un buque inestable
Pág. 53
ÍNDICE DE TABLAS
Tabla 01: Dimensiones del buque real y el buque modelo Pág. 07
Tabla 02: Resultados de ensayos hidrodinámicos Pág. 07
Tabla 03: Conexiones generales del circuito Pág. 21
Tabla 04: Significado de las abreviaturas del circuito. Pág. 23
Tabla 05: Conexiones específicas de los motores Pág. 23
Tabla 06: Conexiones específicas de los PWM Pág. 24
Tabla 07: Redistribución de pesos en el remolcador a escala Pág. 27 Tabla 08: Notación estándar para aplicaciones de maniobra
y control de buques.
1. INTRODUCCIÓN
Este proyecto ha sido desarrollado en el Laboratorio de Experimentación de Vehículos Marinos de las Escuela Técnica Superior de Náutica de Santander para la obtención del título de Grado en Ingeniería Marina.
El trabajo realizado se ha basado en la modificación del modelo autónomo a escala de un remolcador de altura adaptándolo a instrumentos de medida más avanzados, tales como la Unidad de Medida inercial, la cual es mucho más pequeña y de mayor precisión que la unidad anterior. Además, se ha realizado una redistribución de la instrumentación y de los elementos de propulsión así como los pesos entre la parte de popa y la proa. Se han realizado trabajos de mantenimiento y sustitución de componentes averiados tales como los servomotores, el circuito operacional LM741, entre otros.
En este proyecto se incluye una descripción detallada de la instrumentación y los elementos instalados en el modelo a escala, la norma NMEA 0183, el software empleado para el control remoto del remolcador, los trabajos de mantenimiento, así como los ensayos y pruebas de mar propuestos.
Dicho trabajo forma parte del marco experimental del Grupo I+D+I para realizar futuros proyectos complementarios.
1.1. Objetivo
El objetivo del proyecto es preparar el modelo a escala de un remolcador de altura para que puedan llevarse a cabo ensayos estáticos y dinámicos.
Entre los ensayos estáticos se incluye la tabla de momentos de inercia. Y entre los ensayos dinámicos se incluyen la curva de evolución, la maniobra de zig-zag, pull-out, y las maniobras en espiral directa e inversa.
1.2. Motivación para el desarrollo del TFG
La realización del presente TFG está motivada por la colaboración dentro del Grupo I+D+I de Informática y Automática, perteneciente al Departamento de TEISA.
2. DESCRIPCIÓN
DEL REMOLCADOR Y SU
INSTRUMENTACIÓN
2.1. Datos del buque real y el modelo.
La construcción del modelo, bajo encargo del Grupo de Informática y Automática de la Escuela Técnica Superior de Náutica de la Universidad de Cantabria, fue llevada a cabo por parte del Departamento de Arquitectura y Construcción Navales de la Escuela Técnica Superior de Ingenieros Navales perteneciente a la Universidad Politécnica de Madrid.
El modelo a escala 1:27 fue construido en madera de samba y reforzado con fibra de vidrio en el centro de mecanizado de 5 ejes CNC del Canal de ensayos de la ETSIN. Y cumple con los requerimientos fijados por la ITTC para la fabricación de modelos usados en canales de ensayos.
Los datos del buque real corresponden a un remolcador de salvamento de características similares a las que posee la Sociedad Estatal de Salvamento Marítimo (SASEMAR).
Tipo de buque Buque real Buque modelo
Eslora 48 m 177.848 cm
Manga 15 m 55.5 cm
Calado 5.5 m 20.4 cm
Desplazamiento 2790 141.7 Kg
Tabla 01: Dimensiones del buque real y el buque modelo
V real (Kn) V mod (m/s) Resist (Kg) Pot remolq (Kw) Motor (Kw) 5 0.49 0.35 0.002 0.007 10 0.99 1.34 0.013 0.053 12 1.19 2.03 0.024 0.096 14 1.39 3.17 0.044 0.175 16 1.58 4.67 0.074 0.295 18 1.78 7.21 0.128 0.511
2.2. Instrumentación y componentes
2.2.1. IMU (Unidad de Medición inercial) + AHRS
La Unidad de Medición Inercial de la que está dotada nuestro modelo es la IG-500E está ubicada en el centro de gravedad del buque. Sustituye a la UMI anterior, siendo ésta de menor tamaño, mayor precisión, y dándonos una captura de datos más amplia.
Es un instrumento de alto rendimiento de navegación inercial, dotado de un sensor de orientación (AHRS). Están diseñados para reemplazar los instrumentos giroscópicos mecánicos tradicionales y ofrecer una mayor fiabilidad y precisión.
El AHRS (Attitude and Heading Reference Systems o Sistema de Referencia de Orientación y Rumbo), es un sistema tridimensional que puede estar formado por giroscopios, sistemas microelectromecánicos (MEMS), acelerómetros, y magnetómetros, que proporcionan datos en los 3 ejes del espacio (X, Y, Z). Estos sensores nos proporcionan datos acerca de:
- balanceo (roll): rotación alrededor del eje X. - cabeceo (pitch): rotación alrededor del eje Y.
- viraje o guiñada (yaw): rotación alrededor del eje Z.
Fig.01: Marco de coordenadas inercial
El IG-500E-G4A2P1-S combina un sistema MEMS junto con una Unidad de Medición Inercial (IMU). El rango del acelerómetro es
Y es compatible con el protocolo de transmisión de datos RS-232, utilizado por la National Marine Electronic Association desde sus inicios.
Este modelo elimina las aceleraciones transitorias, suprimiendo así posibles errores de medida.
Además, cuenta con acelerómetros, giroscopios,
magnetómetros, sensores de velocidad, etc. La configuración de transmisión es la siguiente:
La velocidad del defecto: 115200 baudios Los datos de 8 bits
1 bit de parada
Sin paridad
Sin flujo de control
Admite el protocolo binario, que permite la configuración y recuperación de datos, y el protocolo ASCII / NMEA, que se implementa a la salida con el fin de facilitar la integración en los sistemas electrónicos marinos existentes. Ambos protocolos pueden utilizarse simultáneamente.
Las sentencias NMEA implementadas por nuestra UMI se basan en el protocolo NMEA 0183 que se tratará en el apartado 3. Las especificaciones completas del instrumento están adjuntas en el Anexo 1.
2.2.2. Sistema de posicionamiento Global (GPS)
Fijado al mamparo por el lado de proa y conectado mediante puerto serie USB al PC portátil, permite darnos la posición del remolcador.
Mediante el receptor de GPS RCB-LJ que incorpora el chip TIM-LF se obtienen los datos de posición y velocidad, con la exactitud necesaria para realizar un seguimiento correcto de las trayectorias. El GPS está diseñado de manera que se conecte por puerto serie USB y pueda enviar y recibir datos mediante el protocolo de comunicación NMEA 0183.
Fig.02: GPS: circuito e instalación en caja estanca.
Las especificaciones completas del GPS están adjuntas como Anexo 2.
2.2.3. Controlador digital de conmutación electrónica para la regulación de la velocidad de los motores.
El DEC 70/10 del fabricante MAXON (Digital EC Controller) es un amplificador digital compacto de 4 cuadrantes para un control muy eficiente de motores sin escobillas y provistos de sensores Hall con una potencia de hasta 700 W. Y su rango de velocidades está entre 0-1000 rpm.
Fig.03: Controlador digital de conmutación electrónica MAXON para la regulación de velocidad de los motores.
El funcionamiento en 4 cuadrantes permite la deceleración controlada del eje del motor y mejora significativamente el comportamiento del regulador de velocidad.
El modo de funcionamiento seleccionado dentro de las opciones posibles es la regulación de voltaje con compensación IxR: este modo de funcionamiento suministra al motor un voltaje proporcional al valor de la señal de control de velocidad. Si la carga aumenta, la velocidad de giro disminuye. El circuito de control responde aumentando el voltaje de salida y la corriente en el motor. Esta compensación debe de estar ajustada a la resistencia interna del motor, la cual depende de la temperatura y de la carga aplicada.
Las especificaciones completas y las instrucciones de instalación y configuración de los variadores están adjuntas como Anexo 3.
Fig.04: Variadores y tarjetas de adquisición en el interior de la caja estanca
2.2.4. Motores de conmutación electrónica
El modelo está dotado de dos motores de corriente continua MAXON de conmutación electrónica. Están ubicados en popa a ambos lados de babor y estribor. Son de diámetro de 45 mm, sin escobillas, y con una potencia de 250 W cada motor. Alimentados individualmente por 3 baterías de 12 voltios cada una, sumando un total de 36 voltios de alimentación. Están dotados de armazón de aluminio donde van atornillados, y soportes en forma de cuña que hacen de durmientes. Disponen de dos salidas diferenciadas de cableado, una de potencia, y la otra de control.
La velocidad nominal es unas 9000 r.p.m. alimentado por 36 voltios de continua.
Las especificaciones completas de los motores están adjuntas como Anexo 4 con su hoja de datos correspondiente.
Fig.05: Motor de conmutación electrónica y reductor de engranajes.
2.2.5. Reductoras
Cada motor lleva acoplado una reductora de engranajes de 12:1, de 42 mm de diámetro. Lo que hace que las hélices giren a unas 750 r.p.m.
Las especificaciones completas de las reductoras están adjuntas como Anexo 5 con la hoja de datos suministrada por el fabricante.
2.2.6. Acoplamientos
Se disponen dos acoplamientos de aluminio de alta resistencia con fuelle de acero inoxidable. Dichos acoplamientos están instalados uno a la salida de cada motor, conectados a cada reductora y unidos con los ejes de cola.
Las especificaciones del fabricante están adjuntas como Anexo 6.
Fig.06: Acoplamiento de aluminio de alta resistencia con fuelle de acero inoxidable instalado en el modelo del remolcador.
2.2.7. Hélices de 4 palas
El remolcador está provisto de dos hélices fabricadas en latón, de 4 palas, típicamente utilizadas en remolcadores y barcos de empuje. El modelo seleccionado es el 147-31 y 147-32, que corresponden con la hélice del lado de estribor y babor respectivamente. Con un diámetro de 90 mm, diseñada para velocidades máximas de 3900 r.p.m.
Las especificaciones completas de las hélices están adjuntas como Anexo 7 en su hoja de datos
Fig.07: Hélices de latón de 4 palas.
2.2.8. Tarjeta de adquisición de datos
El modelo dispone de 2 tarjetas de adquisición de datos DAQ NI USB-6008 ubicadas en popa. Convierten la señal de analógica a digital, dispone de 8 entradas y 2 salidas analógicas de 12 bits. Dispone de 12 entradas/salidas digitales, además de un contador de 32 bits. Esta tarjeta ofrece rangos de voltaje de salida entre 0 y 5 voltios.
Fig.08: Tarjeta de adquisición de datos NI USB-6008
Las especificaciones completas de las tarjetas DAQ están adjuntas como Anexo 8.
2.2.9. Servomotores de gobierno del buque
Los dos servomotores, de 13 kg/cm de par motor, están dotados de un cajetín con un PWM de control electrónico cada uno, una salida de cableado de potencia y otra de
que pasa a través del casco mediante un casquillo de latón, permite dirigir las dos toberas de 95 mm de diámetro.
Fig.09: Toberas tipo KORT
El brazo de este servomotor tiene un máximo de 140 grados de recorrido y el eje de salida está apoyado en un doble cojinete de bolas, lo que aumenta su vida útil.
Las especificaciones completas de los servomotores están adjuntas como Anexo 9.
2.2.10. Circuito PWM para el control de los servomotores.
Este circuito de modulación por ancho de pulsos sirve para modificar el ciclo de una señal periódica, en nuestro caso para controlar la energía que es enviada a un servomotor. Lo usamos para controlar los servomotores, los cuales modifican su posición de acuerdo al ancho del pulso enviado cada un cierto período que depende de cada servo motor. Los circuitos PWM presentan la posibilidad de que se vean afectados por interferencias generadas por señales de radiofrecuencia, para minimizar dichas interferencias se debe ubicar el circuito lo más próximo al servomotor.
Las especificaciones completas del circuito PWM están adjuntas como Anexo 10.
Fig.11: PWM de control del servomotor
2.2.11. Circuito con operacionales LM741 para controlar los variadores de los motores
Se ha diseñado un circuito electrónico con amplificadores operacionales para transformar la tensión de salida de la tarjeta de adquisición de datos (rango entre 0 y 5 voltios) en una tensión de salida de rango de 0 a 10 voltios para controlar los variadores de los motores de propulsión principal, que trabajan con estos rangos de voltaje. El buque modelo lleva instalado un circuito montado con dos amplificadores operacionales UA741, que es una versión del LM741 fabricada por la casa ST Microelectronics.
en formato encapsulado con 8 pines. Tiene un amplio rango de alimentación de ±22V, ancho de banda de 1 MHz, alta ganancia, entradas de ajuste de offset, voltaje de offset de 1 mV, salida protegida contra cortocircuito continuo, el tipo de amplificación es compensada en frecuencia internamente, y funciona en un rango de temperatura entre 0 y 70oC.
Fig.12: Amplificador operacional UA741CN
Los dos amplificadores de tensión funcionan uno en modo inversor y otro en modo no inversor. Para ello están alimentados con una tensión simétrica de corte de +12 voltios y -12 voltios con conexión a tierra.
Fig.13: Esquema del circuito con amplificadores operacionales 741 modo inversor y no inversor.
Fig.14: Fotografía del circuito con amplificadores operacionales 741 modo inversor y no inversor.
Las especificaciones completas del amplificador operacional 741 están adjuntas como Anexo 11.
2.2.12. Fuente de alimentación
Ubicada en proa en el costado de estribor está instalada una fuente de alimentación modelo SD-25A-5 que convierte la alimentación de la batería de 12 voltios a la que está conectada en 5 voltios. La fuente alimenta con 12 voltios el GPS, y con 5 voltios el router y los circuitos PWM de control de los servos.
Las especificaciones completas de la fuente de alimentación están adjuntas como Anexo 12.
Fig.15: Fuente de alimentación convertidor 12V-5V
2.2.13. Baterías de alimentación
La alimentación de energía eléctrica de los diferentes componentes eléctricos y electrónicos se realiza a través de baterías de 12 voltios ubicadas en la parte de proa.
Con un total de 10 baterías.
- 3 baterías para el motor de estribor - 3 baterías para el motor de babor
- 2 baterías para los amplificadores operaciones inversor y no inversor para el control de potencia de los motores a través de los variadores.(±12V)
Las especificaciones completas de las baterías están adjuntas como Anexo 13.
Fig.16: Baterías de alimentación de 12 voltios.
2.2.14. Disyuntores magnetotérmicos
Los motores están protegidos por un disyuntor magnetotérmico cada uno. Modelo C60N sistema multi9 del fabricante de 2 polos y 16 amperios.
A cada magnetotérmico se conectan las 3 baterías en serie que alimentan a cada motor.
Están enclavados en el mamparo, en el lado de proa.
Las especificaciones de los disyuntores magnetotérmicos están adjuntas como Anexo 14.
Fig.17: Disyuntores magnetotérmicos de 2 polos.
2.2.15. Router inalámbrico
El modelo es controlado mediante una señal de WI-FI generada por un router ubicado en el castillo de proa. Este router permite acceder al PC portátil que controla el buque modelo desde un puesto remoto. Está alimentado por una
tensión de 5 voltios que proviene de la fuente de alimentación.
Las especificaciones completas del router están adjuntas como Anexo 15.
Fig.18: Router WIFI
2.2.16. PC portátil
Ubicado en la parte de proa, y desde donde se controla toda la instrumentación del buque modelo. Conectado al router para que pueda ser controlado desde un puesto remoto.
2.2.17. Cajas estancas
El buque modelo dispone de dos cajas estancas, una ubicada en popa y otra en proa.
La caja de popa contiene: los variadores, las tarjetas de adquisición de datos, y el circuito amplificador operacional 741. La caja estanca ubicada en la parte proa contiene el GPS.
2.3. Circuito eléctrico y conexiones.
El circuito eléctrico representado en la figura 19 muestra los elementos y conexiones de nuestro modelo a escala del remolcador.
Tres baterías de 12 voltios alimentan a cada motor, haciendo un total de 36 voltios, disponiendo cada motor un disyuntor magnetotérmico como protección. Dos baterías de 12 voltios nos proporcionan la señal de ±12 voltios necesarios para el circuito con amplificadores operacionales LM741. Una fuente de alimentación nos proporciona salida de 5 voltios de continua para alimentar al Router y a los PWM de control de los servomotores.
El PC portátil, a través de la conexión puerto serie USB de las tarjetas de adquisición de datos, controla los variadores que regulan la velocidad de los motores, y también controla los servomotores. El GPS y la UMI se conectan de igual modo mediante puerto serie USB al PC portátil.
Tabla 03: Conexiones generales del circuito
CONEXIONES GENERALES
MGE TAD-E MOTOR E MOTOR B Circuito Amplificador
Operacional 741 B2+B3+B4 4-VE (22) Blanco – VE (8) Blanco – VB (8) S+ --VE (13 ) S+ --VB (13 ) Rojo –VE (5) 4-32) Marrón – VE (9) Marrón – VB (9) S- --VE (14 ) S- --VB (14 ) Negro- VE (6) 16- NI (1) Verde – VE (10) Verde – VB (10) E+ --TAD B (AO0) E+ --TAD B (AO1 ) MGB 16- VB (22) Gris – VE (11) Gris – VB (11) E- --TAD B (GND ) E- --TAD B (GND ) B7+B8+B9 31- VB (15) Amarillo – VE (12) Amarillo – VB (12) B5- -12v B10- +12v Rojo –VB (5) 16-1 Negro1- VE (2) Negro1- VE (2) F.A. 12V F.A. 5V Negro- VB (6) 15-PWM B Negro2- VE (3) Negro2- VE (3) B1 (+/-) Router (+/-) TAD-B 14-PWM E Negro3- VE (4) Negro3- VE (4) GPS(+/-) PWM`s (+/-) USB-PC (azul) 13-negro F.A.
UMI GPS ROUTER Rojo=+
USB - PC USB-PC (azul) USB-PC (azul) ETHERNET-PC (azul) Negro= -
Tabla 04: Significado de las abreviaturas del circuito.
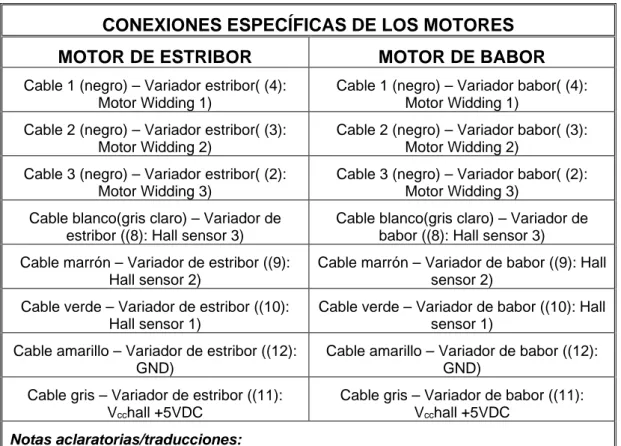
Las conexiones de los motores son las que se presentan en la siguiente tabla y corresponden con el esquema de la Fig.19.
CONEXIONES ESPECÍFICAS DE LOS MOTORES MOTOR DE ESTRIBOR MOTOR DE BABOR
Cable 1 (negro) – Variador estribor( (4): Motor Widding 1)
Cable 1 (negro) – Variador babor( (4): Motor Widding 1)
Cable 2 (negro) – Variador estribor( (3): Motor Widding 2)
Cable 2 (negro) – Variador babor( (3): Motor Widding 2)
Cable 3 (negro) – Variador estribor( (2): Motor Widding 3)
Cable 3 (negro) – Variador babor( (2): Motor Widding 3)
Cable blanco(gris claro) – Variador de estribor ((8): Hall sensor 3)
Cable blanco(gris claro) – Variador de babor ((8): Hall sensor 3) Cable marrón – Variador de estribor ((9):
Hall sensor 2)
Cable marrón – Variador de babor ((9): Hall sensor 2)
Cable verde – Variador de estribor ((10): Hall sensor 1)
Cable verde – Variador de babor ((10): Hall sensor 1)
Cable amarillo – Variador de estribor ((12): GND)
Cable amarillo – Variador de babor ((12): GND)
Cable gris – Variador de estribor ((11):
Vcchall +5VDC
Cable gris – Variador de babor ((11):
Vcchall +5VDC
Notas aclaratorias/traducciones: Motor Winding = devanado del motor
Sensores Hall: sensores de efecto Hall para medir campos magnéticos, corrientes o determinar la posición. Se crea un voltaje saliente proporcional al producto de la fuerza del campo magnético y la corriente
Tabla 05: Conexiones específicas de los motores
SIGNIFICADO DE ABREVIATURAS
MGE Magnetotérmico de estribor MOTOR
E
Motor de estribor
MGB Magnetotérmico de babor MOTOR
B
Motor de babor
TAD-E
Tarjeta de adquisición de datos de estribor
UMI Unidad de medición inercial
TAD-B
Tarjeta de adquisición de datos de babor
GPS Sistema de Posicionamiento
Global CAO
741
Circuito amplificador operacional inversor y no inversor
ACOP Acoplamiento
Las conexiones de los PWM`s son las que se especifican en la siguiente tabla y corresponden con el esquema de la Fig.20.
Tabla 06: Conexiones específicas de los PWM
Fig.20: Circuito PWM del servomotor y sus conexiones
CONEXIONES ESPECÍFICAS DE LOS PWM (Modulación por ancho de pulsos)
PWM SERVO ESTRIBOR PWM SERVO BABOR
Fuente de alimentación +5 Voltios (Rojo) – PWM servo estribor (+5V)
Fuente de alimentación +5 Voltios (Rojo) – PWM servo babor (+5V)
Fuente de alimentación -5 Voltios (Negro) – PWM servo estribor(GND)
Fuente de alimentación -5 Voltios (Negro) – PWM servo babor(GND)
PWM servo estribor: Pulso – Servo estribor (Naranja)
PWM servo babor: Pulso – Servo babor (Naranja)
PWM servo estribor: +Ve – Servo estribor
(Rojo)
PWM servo babor: +Ve – Servo babor
(Rojo)
PWM servo estribor: +Ve – PWM servo
estribor: +Ve (Verde)
PWM servo babor: +Ve – PWM servo
babor: +Ve (Verde)
PWM servo estribor: GND – Servo estribor (Marrón)
PWM servo babor: GND – Servo babor (Marrón)
PWM servo estribor: POT – TAD estribor (14) (Granate)
PWM servo babor: POT – TAD estribor (15) (Granate)
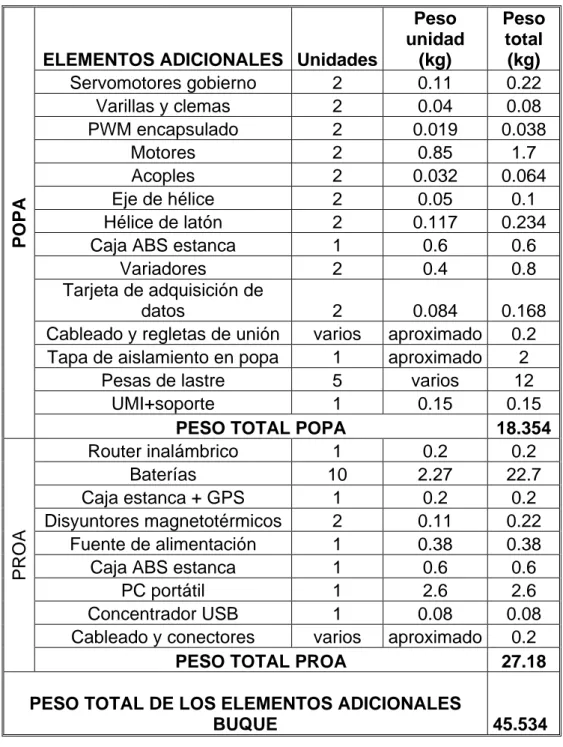
2.4. Redistribución de pesos.
El buque fue pesado mediante un acondicionador de calibrado modelo DC-5/C, que es un amplificador de alta ganancia con entrada diferencial y acoplamiento directo.
PO
PA
ELEMENTOS ADICIONALES Unidades
Peso unidad (kg) Peso total (kg) Servomotores gobierno 2 0.11 0.22 Varillas y clemas 2 0.04 0.08 PWM encapsulado 2 0.019 0.038 Motores 2 0.85 1.7 Acoples 2 0.032 0.064 Eje de hélice 2 0.05 0.1 Hélice de latón 2 0.117 0.234
Caja ABS estanca 1 0.6 0.6
Variadores 2 0.4 0.8
Tarjeta de adquisición de
datos 2 0.084 0.168
Cableado y regletas de unión varios aproximado 0.2
Tapa de aislamiento en popa 1 aproximado 2
Pesas de lastre 5 varios 12
UMI+soporte 1 0.15 0.15
PESO TOTAL POPA 18.354
PRO A Router inalámbrico 1 0.2 0.2 Baterías 10 2.27 22.7 Caja estanca + GPS 1 0.2 0.2 Disyuntores magnetotérmicos 2 0.11 0.22 Fuente de alimentación 1 0.38 0.38
Caja ABS estanca 1 0.6 0.6
PC portátil 1 2.6 2.6
Concentrador USB 1 0.08 0.08
Cableado y conectores varios aproximado 0.2
PESO TOTAL PROA 27.18
PESO TOTAL DE LOS ELEMENTOS ADICIONALES
BUQUE 45.534
Tabla 07: Redistribución de pesos en el remolcador a escala
El peso total del remolcador a escala es de 99.3 kg, tal y como se puede observar el la imagen de la figura 22.
Se ha conseguido que el modelo tenga un asiento cero, o también llamado en aguas iguales, adecuado para los ensayos y pruebas de mar.
3. LA NORMA NMEA 0183
NMEA ® (National Marine Electronic Association-Asociación Nacional de Electrónica Marina) fue fundada en 1957 por un grupo de comerciantes electrónicos que se reunieron en el Salón Náutico de Nueva York para discutir la manera de fortalecer las relaciones con los fabricantes de electrónica.
NMEA ® creó el único estándar de interfaz uniforme para el intercambio de datos digitales entre diferentes productos electrónicos marinos a principios de los años ochenta.
El protocolo NMEA 0183 es una especificación eléctrica y de datos digitales que se combina para establecer la comunicación entre instrumentos electrónicos marítimos como ecosondas, sonares, anemómetros, girocompás, piloto automático, receptores GPS y otros instrumentos como la Unidad de Medición Inercial instala en el buque modelo.
La NMEA 0183 normaliza el tipo de paquetes de datos a transmitir y el contenido de éstos, relacionando bajo la configuración de sentencias mediante un formato determinado para cada tipo de sentencia.
Utiliza estándares eléctricos del tipo EIA-232. El estándar NMEA 0183 utiliza una simple ASCII de comunicaciones serie, protocolo que define cómo los datos se transmiten en una "sentencia" de un "hablador" a múltiples "oyentes" a la vez. A través del uso de expansores intermedios, un hablador puede tener una conversación unidireccional con un número casi ilimitado de oyentes, y el uso de multiplexores, puede hablar a un solo puerto del ordenador.
Las sentencias de la norma NMEA están compuestas por caracteres tipo ASCII. Comienzan por el carácter “$” seguido de dos caracteres que definen el instrumento emisor, seguido de tres caracteres que definen el tipo de sentencia con un determinado formato de datos asociado para cada tipo de sentencia.
Reglas de protocolo de capa de aplicación:
- Los 5 siguientes caracteres identifican al emisor (2 caracteres) y el tipo de mensaje (3 caracteres).
- Todos los campos de datos que siguen son delimitados por comas.
- Cuando los datos no están disponible, el campo
correspondiente permanece en blanco.
- El primer carácter que sigue inmediatamente al último carácter del campo de datos es un asterisco, que únicamente se incluye si se realiza una suma de comprobación.
- El asterisco es seguido por una suma de control representada por dos dígitos de número hexadecimal. La suma de comprobación es el bit a bit OR exclusiva de ASCII códigos de todos los caracteres entre el $ y *. De acuerdo con la especificación oficial, la suma de comprobación es opcional para la mayoría de sentencias de datos, pero es obligatorio para RMA, RMB, y RMC (entre otros).
- Con <CR> <LF> termina el mensaje.
En la figura 23 se muestra el siguiente ejemplo: $GPZDA,201530.00,04,7,2002,00,00*60<CR><LF>
4. VARIABLES QUE DEFINEN EL MOVIMIENTO DEL
MODELO FÍSICO
Fig.25: Variables que definen el movimiento del modelo físico
La dinámica de un barco consta de 6 grados de libertad, tres de traslación y otros tres de rotación en función de ejes cartesianos (x, y, z).
Se consideran inicialmente tres grados de libertad, ya que el movimiento se realiza en el plano horizontal.
Estos modelos lineales sólo permiten describir el movimiento del buque en línea recta. Si se desea describir otro movimiento del buque, es necesario ingresar términos no lineales en el modelo.
En el caso de los barcos que desarrollan altas velocidades, es necesario considerar el movimiento de balance, lo que genera modelos de cuatro grados de libertad.
El movimiento del buque se describe respecto a un eje de referencia inercial.
Trayectoria
Ángulo de la pala del timón
Fig.26: Marco de referencia inercial
Para representar el movimiento de un barco se necesitan seis coordenadas independientes, tres para describir la traslación sobre los ejes:
- xB: avance
- yB: desplazamiento lateral - zB: arfada
El avance, el desplazamiento lateral, y la arfada están referidos a un sistema de coordenadas móvil situado en el buque OB., punto situado en el plano transversal justo encima de la línea de flotación, donde además está ubicada la UMI.
Las tres coordenadas restantes de rotación, pertenecientes al sistema de coordenadas móvil, respecto al sistema de coordenadas inercial de referencia situado en tierra OE son:
- balanceo (roll) - cabeceo (pitch) - guiñada (yaw)
La cinemática estudia los aspectos geométricos del movimiento sin tener en cuenta sus causas. En el modelo cinemático la velocidad lineal y angular son especificados por un conjunto de variables de movimiento, que representan los grados de
libertad del buque. La variable de movimiento debe ser dada con relación a un marco de referencia específico.
En la figura 27 se representan los sistemas de coordenadas inerciales y los movimientos de rotación y traslación del buque.
Fig.27: Sistemas de coordenadas inerciales. (Pérez, T., 2005)
La notación estándar recomendada para su utilización en las aplicaciones de maniobra y control de buques es:
TRASLACIÓN
Movimiento Fuerza Velocidad
lineal Posición Avance X u x Desplazamiento lateral Y v y Arfada Z w z ROTACIÓN
Movimiento Momento Velocidad
angular
Ángulo
Balanceo K p ϕ
Cabeceo M q θ
Guiñada N r ψ
Fig.28: Representación gráfica de los 6 grados de libertad de movimiento del buque
5. CONTROL DE LA PROPULSIÓN
La propulsión es controlada PC portátil, que a través de las tarjetas de adquisición de datos controlan los PWM de los servomotores, y los variadores o reguladores de velocidad de los motores, tal y como se puede observar en el diagrama.
Fig.29: Diagrama de control de propulsión
PC PORTÁTIL TARJETA DE ADQUISICIÓN DE DATOS PWM`S SERVOMOTORES TARJETA DE ADQUISICIÓN DE DATOS VARIADORES MOTORES Arfada Guiñada Desplazamiento Balance Avance Cabece
6. ELEMENTOS NECESARIOS PARA LA REALIZACIÓN DE
ENSAYOS Y PRUEBAS DE MAR
Fig.30: Diagrama de elementos necesarios para la realización de los ensayos.
La comunicación entre el PC situado en tierra y el del remolcador se realiza a través de red inalámbrica Wi-Fi (Wireless Fidelity).
Los puntos de acceso de la red están configurados en modo repetidor. Se dispone de dos puntos de acceso: el punto de acceso de tierra configurado en modo repetidor y el punto de acceso del remolcador configurado como punto de acceso. Ambos PC`s se conectan mediante antenas omnidireccionales que permiten la conexión hasta un radio de 250 metros.
El buque, que cuenta con un PC portátil, dispone de dos tarjetas de adqusición de datos, a través de las cuales, permiten controlar los variadores de velocidad de los motores, y los circuitos de modulación por ancho de pulsos (PWM) para controlar los servomotores. Además, conectado al PC portátil, mediante conexión puerto serie USB disponemos del un sistema de posicionamiento global (GPS), y de una Unidad de Medición Inercial (UMI).
ELEMENTOS NECESARIOS PARA LA REALIZACIÓN DE LOS ENSAYOS
BASE CONTROL DE TIERRA PC PUNTO DE ACCEOS INHALÁMBRICO BUQUE EN AGUAS ABIERTAS PC +TARJETA DE ADQUISICIÓN DE DATOS PUNTO DE ACCESO INALÁMBRICO PWM`S SERVOMOTORES VARIADORES DE VELOCIDAD DE LOS MOTORES MOTORES GPS, UMI
6.1. Sistema software de comunicaciones, adquisición
de datos y control mediante LabView 2013
El software utilizado para el control del modelo a escala del buque es LabVIEW 2013 (Laboratory Virtual Instrumentation Engineering Workbench) creado por National Instruments en 1976 y comercializado a partir de 1986. Es una plataforma y entorno de desarrollo para el diseño de sistemas con un lenguaje de programación visual gráfico. El lenguaje utilizado se llama lenguaje G (Gráfico).
Esta plataforma está recomendada para sistemas hardware y software de pruebas, control y diseño, de modo simulado o real. Además de ser compatible con todo tipo de software y hardware.
El empleo de esta plataforma permite reducir el tiempo de desarrollo de aplicaciones en ámbitos de pruebas, control y diseño entre otras.
La interfaz gráfica de este sistema software dispone de la herramienta DataSocket que permite el intercambio bidireccional de datos entre las aplicaciones instaladas en ambos PC`s.
Los controles que aparecen en la interfaz con el usuario, se denominan ítems, y pueden ser representados como barras deslizantes, mandos de control y botones tipo interruptor de encendido y apagado, entre otros.
Los ítems son publicados gracias a un servidor
(DataSocketServer) capaz de publicar datos para que otros procesos clientes los lean. Además de mostrar los clientes conectados al servidor.
La tecnología incluye el protocolo basado en TCP/IP de comunicación DSTP (DataSocket Transfer Protocol) utilizado por LabVIEW. Es posible conectarse al servidor de DataSocket usando DSTP URL. La siguiente URL conecta los datos al ítem llamado Item1 en el servidor de DataSocket que se está ejecutando en el mismo ordenador, ordenador local, como
puede ser el PC portátil donde se dispone de la aplicación SCADA (Supervisory Control And Data Acquisition, lo que significa Supervisión, Control y Adquisición de Datos)
De esta forma, se intercambian datos a través de la red inalámbrica entre los PC`s con un solo servidor de DataSocket. Este servidor se ejecuta en el PC de control de tierra, y es donde se arrancan los procesos. En el PC portátil del remolcador sólo es necesario que se arranque de forma automática la misma aplicación a la del portátil, lo que se efectúa incluyendo el archivo cliente en la carpeta de inicio de Windows 7.
Mediante el ejecutable DataSocket Server Manager, se configuran los parámetros de envío de los datos que se van a conectar al servidor de DataSocket en el ordenador local, como es el PC Portátil. De esta forma es posible limitar el número total de conexiones simultáneas al servidor de DataSocket, en este caso son dos procesos los que se conectan, además se pueden fijar las restricciones en el tamaño de los ítems de datos a enviar, para evitar el envío de bloques de datos mayor de lo necesario y así mejorar la velocidad de respuesta.
En este sistema, el proceso de lanzamiento de los procesos para el establecimiento de la comunicación es:
-Primero: lanzar el servidor de DataSocket instalado en el PC portátil para que se conecten los otros dos procesos y puedan intercambiar entre ellos paquetes de datos.
-Segundo: arrancar la aplicación de ambos portátiles que se arranca de forma automática al encender el PC industrial. El programa desarrollado mediante LabVIEW se denomina Instrumento Virtuales (VI), ya su apariencia y funcionamiento imitan a los de un instrumento real. El programa es análogo a las funciones creadas con los lenguajes de programación convencionales. Los VIs tienen una parte interactiva con el usuario y otra parte de código fuente, y aceptan parámetros
Cada VI contiene dos partes principales:
• Panel frontal: donde el usuario interacciona con el VI. Esta interfaz recoge las entradas procedentes del usuario y representa las salidas proporcionadas por el programa. Un panel frontal está formado por una serie de botones, pulsadores, potenciómetros, gráficos, etc. Cada uno de ellos puede estar definido como un control o un indicador. Los controles sirven para introducir parámetros al VI, mientras que los indicadores se emplean para mostrar los resultados producidos, ya sean datos adquiridos o resultados de alguna operación.
Fig.31: Panel de control de la propulsión
• Diagrama de bloques: Es el código que controla el programa y constituye el código fuente del VI. En el diagrama de bloques es donde se realiza la implementación del programa del VI para controlar o realizar cualquier procesado de las entradas y salidas que se crearon en el panel frontal. Incluye funciones y estructuras integradas en las librerías que incorpora LabVIEW.
El programa desarrollado en un bucle while comprueba el valor de lo que se halle conectado al terminal condicional al finalizar el bucle. Por lo tanto, el bucle siempre se ejecuta al menos una vez.
Fig.32: Gráfica de la Unidad de Medición Inercial representada con LabView
En la figura 32 tenemos el panel de control en LabVIEW mostrando la gráfica resultante con los datos obtenidos por la Unidad de Medición Inercial en tiempo real. La gráfica correspondiente a la línea roja nos da información sobre el balanceo (roll), la verde sobre cabeceo (pitch), y la azul sobre la guiñada (yaw). Además, a la izquierda de la gráfica se pueden ver las lecturas de: magnetómetros (m0, m1, m2), giróscopos (g0, g1, g2), acelerómetros (a0, a1, a2), cuaterniones (q0=número real, q1, q2 y q3 =número imaginario que corresponde con los ejes i, j, k), temperaturas internas (t0, t1), valores de la matriz de rotación (p0, p1, p2), velocidades (v0, v1, v2), y tiempo transcurrido desde el reset.
El diagrama de bloques que corresponde a este panel de control seria el representado en la figura:
El diagrama de estado del programa es el representado en la figura 33, usa un bucle while, que repite el código dentro de su diagrama hasta que se produce una condición específica. El bucle siempre se ejecuta al menos una vez. En este caso, se inicia el software, se abre el programa, se configuran los parámetros de la Unidad de Medición Inercial, se lee los datos de la UMI, y de ahí por un lado se imprimen en la pantalla del panel frontal, se guardan los datos en un archivo, y se representan el
observa en la figura 32. Finalmente, si la condición es verdadera se finaliza, y si es falsa vuelve a comenzar.
6.2. Diagrama de bloques
En la figura 34 observamos el programa en lenguaje gráfico representado por el diagrama de bloques.
7. ENSAYOS Y PRUEBAS DE MAR
El modelo a escala del remolcador, ya instrumentado y equipado, queda preparado para la realización de los siguientes ensayos:
7.1. Ensayos estáticos
7.1.1. Mesa de momentos de inercia
La calibración de la mesa de inercias consiste en obtener una curva de períodos frente a los momentos de inercia. La curva se obtiene por ajuste de mínimos cuadrados de los datos experimentales. Debería salir una recta, pero resultado suele ser de una rampa parábola.
El proceso para obtener los datos experimentales se realiza poniendo distintos pesos sobre la mesa de inercias, hacerla oscilar y medir el tiempo que tarda en dar 10 oscilaciones.
Fig.35: Esquema de la mesa de inercias
En cada medida hay que tener en cuenta:
M (kg): peso colocado simétricamente en la mesa. dzf (cm): altura vertical del eje de giro del tablero de la
mesa.
dzm (cm): altura vertical del centro de masas del peso respecto al tablero.
dxm (cm): distancia horizontal del peso al centro del tablero
T: tiempo que tarda el peso M en dar 10 oscilaciones, despreciando normalmente las dos primeras.
I: momento de inercia, peso M por la distancia de la masa al eje de giro al cuadrado. 𝐼𝐼 = 𝑀𝑀 × 𝑟𝑟2.
Después de calcular el momento de inercia, se representa en un sistema de coordenadas con los períodos en el eje de abcisas y los momentos de inercia en el eje de coordenadas.
Fig.36: Distancias fundamentales del buque
Para el cálculo de la altura del centro de gravedad KG se necesita conocer las distancias fundamentales que son: metacentro(M), centro de gravedad (G), centro de carena (B), distancia del centro de carena a la quilla (BM), distancia del centro de gravedad al metacentro(GM), altura del centro de gravedad a la quilla (KG).
El centro de carena y el metacentro dependen de la geometría, con lo que sólo se puede modificar el centro de gravedad. Para ello, se coloca un peso pequeño en la borda del modelo, de tal forma que produzca una escora de 3o o 4o. Después se repite hacia el lado contrario. Se hace varias veces y se toma la media de los valores obtenidos.
Debemos conocer el desplazamiento del modelo más la masa añadida, ∆𝑀𝑀= 141.7 𝑘𝑘𝑘𝑘+ x
𝐾𝐾𝐾𝐾𝑀𝑀 = ∆1
𝑀𝑀�∆𝐸𝐸× 𝐾𝐾𝐾𝐾𝐸𝐸 − 2𝑃𝑃ℎ𝑝𝑝� Donde: P: peso añadido
D: distancia a la que se colocan los pesos
El KME se obtiene de interpolar en la tabla de características del barco. Por ejemplo para P=2 kg.
Con este valor se va a la tabla de características del modelo, y se calcula KME interpolando.
𝐾𝐾𝐾𝐾𝐸𝐸 = 𝐾𝐾𝑀𝑀𝐸𝐸 − 𝐾𝐾𝑀𝑀𝐸𝐸 De la ecuación: ∆𝑀𝑀𝐾𝐾𝐾𝐾𝑀𝑀 = ∆𝐸𝐸𝐾𝐾𝐾𝐾𝐸𝐸 − 2𝑃𝑃ℎ𝑝𝑝
𝐾𝐾𝑀𝑀𝐸𝐸 = 𝑃𝑃 × 𝑑𝑑
(∆𝑀𝑀+ 2𝑃𝑃) × tan �∅𝜋𝜋 180� �
Para el cálculo del momento de inercia del modelo, se coloca en la mesa de inercias y se mide el tiempo que tarda en dar 10 oscilaciones. Una vez terminado, con la curva de calibración se obtiene el momento de inercia del modelo.
Para calcular el radio de giro real, éste debe ser del orden del 25% de la eslora entre perpendiculares. En este caso es de 48 m, la escala 1:27, luego el brazo de giro debe ser el 25% de Lpp/escala=25%(48/27), por lo que nos da un brazo de giro de unos 0.44 metros.
𝐼𝐼𝑀𝑀− ∆ℎ2 = ∆𝑅𝑅𝐼𝐼
Se suma la altura del centro de gravedad del modelo referido a la quilla más la altura del tablero de la mesa de inercias al eje de giro.
7.2. Ensayos dinámicos
La realización de ensayos en aguas abiertas con modelos de buques resulta de gran utilidad en el proceso de diseño para extrapolar el comportamiento del buque modelo en el buque real.
Además de las pruebas de mar que se realizan para comprobar las características de maniobra del buque, se realizan otras pruebas de mar que permiten medir las características del comportamiento dinámico del buque y las limitaciones del sistema de gobierno.
De acuerdo con las recomendaciones de la 14ª conferencia ITTC “International Towing Tank Conference” [14th ITTC, 1975], Las pruebas tienen que proporcionar a los armadores y a los astilleros información sobre las características de funcionamiento del buque, como son el mantenimiento y cambio de rumbo y las maniobras de emergencia.
Para determinar la eficacia del comportamiento del buque para el mantenimiento de rumbo, las pruebas apropiadas propuestas son: prueba en espiral directa e inversa y maniobra de zig-zag con ángulos del timón pequeños. Para determinar la calidad del comportamiento en la maniobra de cambio de rumbo se recomiendan: la maniobra de zig-zag, la prueba de evolución de 15º de timón y la maniobra de cambio del rumbo.
Para determinar la capacidad del buque ante situaciones de emergencia, las pruebas de mar más convenientes propuestas son: prueba de evolución con el máximo timón y maniobra de parada de emergencia o “crash-stop”.
Los buques, deben poseer unas capacidades de maniobra que le permitan mantener el rumbo, girar, comprobar los giros, operar a una aceptable baja velocidad y parar de forma satisfactoria. Las pruebas de mar están destinadas a dar una medida de las siguientes características: capacidad de giro,
control del rumbo, cambio de rumbo, mantenimiento del rumbo, y capacidad de parada (Lewis, 1989)
A continuación, realizo una descripción de las pruebas de mar más importantes y para lo que se ha dado utilidad este proyecto:
7.2.1. Maniobra de la curva de evolución
La curva de evolución es: “…la curva descrita por el centro de gravedad de un buque desde el momento en que se coloca la pala del timón a una banda hasta que la evolución tiende a convertirse en una circunferencia.” (Díaz, C., 1972) Con esta prueba se determina el radio de giro del buque y se verifica el comportamiento del servomotor y del timón en las maniobras de cambio de rumbo.
Además se pueden obtener:
• Diámetro táctico: distancia lateral entre la dirección inicial de avance y el momento donde se alcanza un rumbo del radio inicial + 180o.
• Diámetro final: diámetro de la evolución en la fase final cuando tiende a ser una circunferencia. A menor ángulo girado por la pala del timón mayores dimensiones de la curva.
• Avance: distancia entre el punto inicial de la maniobra y el punto más alejado en sentido trasversal a la dirección de avance inicial (Ri).
• Traslado lateral: distancia entre la dirección inicial y un punto cualquiera de la curva evolutiva. Siendo característico el punto de 90o.
• Duración de la evolución: tiempo que demanda alcanzar un rumbo igual al inicial después de realizar la evolución completa.
• pérdida de velocidad en el giro constante, y tiempos necesarios para cambiar el rumbo 90º y 180º respectivamente.
Para el estudio se realizan pruebas para diferentes ángulos de pala: 10º, 20º y timón todo a banda. También se realizan estas mismas para diferentes calados y asientos del buque. La curva de evolución está formada por: la fase de aproximación y la fase de maniobra.
En la fase de aproximación, el buque navega avante, en línea recta, con velocidad constante y timón con ángulo cero. Las velocidades y aceleraciones transversales y angulares son nulas.
En la fase de maniobra, comienza en el momento en el que se aplica al timón un ángulo δ constante a babor o a estribor. Se compone de tres fases:
Primera fase: con el buque a velocidad constante se realiza un cambio de rumbo moviendo el timón hasta alcanzar el ángulo deseado (15o). Las velocidades transversales y angulares son prácticamente nulas, la aceleración transversal toma un valor negativo, y la aceleración angular es mayor que cero.
Segunda fase: las velocidades y aceleraciones tienen valores no nulos. Y al final de esta fase, las aceleraciones tienden a anularse y se alcanza un equilibrio dinámico entre las fuerzas que intervienen en la curva de evolución del buque.
Tercera fase o fase estacionaria: en el estado de equilibrio dinámico, el buque empieza a girar con radio constante. Las velocidades transversales y angulares tienen un valor distinto de cero, y las aceleraciones se anulan. En esta fase, se reduce la velocidad del buque aproximadamente un 60% de la velocidad de la fase de aproximación.
Fig.38: Representación de la curva de evolución, fases y parámetros característicos.
Fig.39: Representación de las velocidades y aceleraciones transversales y angulares de la curva de evolución.
Para determinar los parámetros de esta prueba es necesario hacer una curva de evolución de por lo menos 540º.
Ángulo de deriva U Radio de giro estacionario Traslado lateral máximo Avance máximo
Avance- cambio de rumbo 90o
FASE DE APROXIMACIÓN 1ª F 2ª Fase Comienzo ejecución timón Di ám etr o tác ti c o, c am bi o de r um bo 1 80 o T ras lado later al - c am bi o de 3ª Fase
Aproximación 3º Fase. Estacionaria
Fase de maniobra 1ª F
Si se divide por la eslora del buque el diámetro táctico, el avance, y el traslado lateral, obtenemos su valor en coeficientes adimensionales, muy útiles para compararlos con otros buques. Es conveniente realizar las pruebas con el buque a baja, media y máxima velocidad, para comprobar su comportamiento en los tres regímenes de funcionamiento característicos.
7.2.2. Maniobra de zig-zag de Kempf
Esta maniobra se realiza invirtiendo el timón a babor y a estribor de manera alterna, con una desviación del rumbo inicial. El procedimiento de maniobra es (Lewis, 1989): a) Hacer que el buque navegue avante en línea recta y a una velocidad predeterminada durante un tiempo determinado. b) Primera ejecución: Meter el timón a la banda de estribor a la máxima velocidad una ángulo predeterminado (δ= 10º), y mantenerlo en este valor hasta que se produzca el cambio de rumbo del mismo valor (10º).
c) Segunda ejecución: Situar el timón a la máxima velocidad en la banda de babor el mismo ángulo (10º). Después, se mantiene la posición del timón y el buque continúa girando en la dirección original, con una velocidad de giro decreciente hasta decaer el movimiento. Entonces, como respuesta al timón, el buque gira a babor. Se sigue manteniendo el timón hasta alcanzar el cambio de rumbo preestablecido en la banda de babor. De esta forma se completa la prueba de sobreoscilación.
d) Tercera ejecución: Para completar la maniobra de zig-zag, se vuelve a meter el timón a la máxima velocidad, el mismo ángulo (10º) en la banda inicial de estribor, y se continúa hasta realizar un total de 5 ejecuciones del timón.
El valor normal de cambio de rumbo es 10º. También se puede tener en cuenta una prueba modificada con un cambio de rumbo de 20º.
Se recomienda ejecutar las maniobras a velocidad máxima velocidad y, siempre que sea posible, también a velocidad media. (14ª conferencia ITTC)
Los resultados de esta maniobra, son indicadores de la capacidad del timón para controlar el rumbo del buque. También se pueden utilizar para comparar las características de maniobra de buques distintos.
Desde el punto de vista de la interpretación de las reglas internacionales de navegación en el mar, tiene especial interés la utilización de los ángulos del timón a estribor para comprobar la habilidad de giro del buque y el control del rumbo, ya que en caso de emergencia los giros y cambios de rumbo, deben realizarse a estribor. Por esta razón, la maniobra de zig-zag normal comienza con la aplicación del ángulo del timón a estribor.
Fig.40: Gráfica de la maniobra de zig-zag
Los símbolos representan: δ ángulo del timón, ψ rumbo del buque, yo/L distancia normal a la trayectoria inicial dividida por la eslora del buque
Para un primer análisis simple de los resultados, se pueden usar los valores característicos de gobierno definidos en la
Es tr ib o r B abor E s tr ibor B abor
figura 39; los valores se dibujan como una función del ángulo del timón.
Las principales medidas que se obtienen son:
a) El tiempo ta que se tarda en alcanzar la segunda ejecución del rumbo, lo que indica la habilidad del buque para cambiar rápidamente de rumbo o la efectividad del timón.
b) El ángulo de sobreoscilación en el rumbo.
c) La sobreoscilación de la trayectoria obtenida al realizar la prueba.
Los resultados de la maniobra de zig-zag dependen de la velocidad del buque, ya que el tiempo que se tarda en alcanzar un rumbo dado disminuye cuando ésta aumenta.
7.2.3. Maniobra de “pull-out”
Esta maniobra se utiliza para obtener una indicación de la estabilidad del buque en una trayectoria en línea recta. Se aplica al buque un ángulo del timón de 20º y cuando el buque alcance una velocidad de caída por cambio de rumbo constante se vuelve el timón a la posición neutral. Si el buque es estable, la velocidad angular r (guiñada) se reducirá hasta ser nula de igual manera en los cambios de timón a babor como a estribor. Si el buque es inestable, la velocidad de caída r se reducirá hasta algún valor de velocidad residual. En la figura 40 se puede observar la representación gráfica de la maniobra de pull-out de un buque estable y otro inestable, ambos en trayectoria rectilínea. (López, E.2005).
Fig.41: Representación gráfica de la maniobra de Pull-out (López, E. 2005)
7.2.4. Maniobras en espiral directa e inversa
Estas pruebas proporcionan una medida cualitativa de la estabilidad direccional del buque. Para buques que muestran características estables, pueden usarse las pruebas en espiral directa de Dieudonné o inversa de Bech para obtener la respuesta a los ángulos pequeños del timón. Para los buques inestables, la 14 ITTC recomienda la prueba espiral inversa de Bech dentro de los límites indicados por los resultados de las maniobras de “pull-out”.
7.2.4.1. Maniobra espiral directa de Dieudonné: La maniobra en espiral directa se utiliza para determinar las características de estabilidad
direccional del buque, grado de estabilidad y el rango de validez de la teoría lineal.
El procedimiento para realizar la maniobra consiste en los pasos siguientes:
a) Se hace que el buque navegue avante con un rumbo recto inicial a velocidad constante.
b) Se pone el timón a, aproximadamente, un ángulo δ de 25º a estribor y se mantiene hasta que la velocidad de cambio de rumbo del buque (r =ψ) deje de variar.
c) Una vez alcanzado un valor constante, se disminuye en 5º el ángulo del timón y se mantiene de nuevo hasta alcanzar las condiciones estacionarias de caída del rumbo del buque.
d) Este procedimiento se repite hasta que el timón haya recorrido todos los ángulos del timón desde 25º a estribor hasta 25º a babor y de nuevo hacia estribor.
e) En el rango de ángulos del timón de 5º alrededor del cero se deben reducir los intervalos (normalmente de 1º) para determinar valores más exactos. (López, E. 2005)
Los datos obtenidos se representan en una gráfica de la velocidad (r) en función de cada ángulo del timón, como las mostradas en las figuras 42 y 43.
Para realizar un estudio exacto de la estabilidad del buque, es esencial no limitar el tiempo del experimento entre los ángulos del timón. (Lewis, 1989)
7.2.4.2. Maniobra espiral inversa de Bech:
En esta maniobra, el buque se gobierna a una velocidad de cambio de rumbo constante y se mide el ángulo del timón necesario para producir esta velocidad de cambio de rumbo (r =ψ). Para ello, nuestro buque modelo dispone de una UMI dotada de un giróscopo que mide la velocidad de cambio de rumbo, y además conocemos el ángulo exacto girado por el timón visto directamente en el panel de control del programa en LabVIEW
Fig.43: Representación gráfica de las maniobras en espiral directa e inversa de un buque inestable. (López, E.2005)
8. MANTENIMIENTO
Los objetivos del mantenimiento son:
- Garantizar el funcionamiento regular del modelo a escala - Evitar el envejecimiento prematuro de los elementos que lo componen
- Corregir o prevenir fallos para que continúen prestando el servicio - Reducir factores de desgaste, deterioro y roturas
- Alcanzar una mayor vida útil de todos los elementos de la instalación, y en consecuencia reducir costes.
- Garantizar la seguridad e integridad del modelo a escala
Se llevará a cabo un programa de mantenimiento periódico, en el que se establecerán trabajos mensuales, trimestrales, y semestrales; tales como:
Trabajos mensuales: lubricar elementos mecánicos, comprobar el estado de las conexiones, y realizar prueba de funcionamiento del software junto con la instalación en seco.
Trabajos trimestrales: comprobar estanqueidad y prueba de funcionamiento en la piscina de pruebas del laboratorio.
Trabajos semestrales: realización de pruebas de mar. Para lo cual se establece el siguiente programa de mantenimiento previo a las
ELEMENTOS DE GOBIERNO
TOBERAS • Lubricar con 3 en 1 el espacio interior entre la
limera y la mecha.
• Lubricar con 3 en 1 la parte superior de la tobera en la junta.
• Lubricar con 3 en 1 la parte inferior de la tobera donde descansa el talón.
VARILLAS EXTENSORAS DE LOS
SERVOS
• Revisar la conexión de las dos partes de la varilla del servo a la tobera, verificar que no pandea. • Revisar la clema de unión de las dos partes de la
varilla.
• Lubricar con 3 en 1 la unión de la cabeza de la varilla con la extensión de la mecha.
SERVOS • Revisar estanqueidad de los cajetines de los PWM. • Revisar estanqueidad de los servos.
• Verificar el LED de funcionamiento del PWM.
• Lubricar con 3 en 1 la parte superior del servo donde está encastrado el brazo extensor.
• Aplicar vaselina la superficie del servo.
HÉLICES • Aplicar 3 en 1 en la superficie roscada de la tuerca, arandela y cuerpo de la hélice.
• Aplicar vaselina en la superficie roscada de la tuerca, arandela y cuerpo de la hélice.
• Frotar con un paño suave la superficie de latón restante de la hélice
PROPULSIÓN MOTORES Y REDUCTOR DE ENGRANAJES • Comprobar fijaciones
• Aplicar vaselina a la superficie • Lubricar engranajes del reductor
ACOPLES • Lubricar con 3 en 1 las uniones
CIRCUITO ELÉCTRICO
CABLEADO • Revisar que todas las conexiones están bien fijadas y no hay cables sueltos
BATERÍAS • Revisar la carga completa de las baterías mediante el polímetro
• Comprobar que las conexiones con los bornes están ajustadas
CIRCUITOS • Utilizar el limpiador de circuitos cuando se detecte principios de óxido o suciedad en los circuitos.
COMUNICACIONES Y CONEXIONES USB
ROUTER
Comprobar conexiones de alimentación con bornes de la batería
Verificar el LED de encendido
Comprobar conexión cable Ethernet con el PC
PC PORTÁTIL • Verificar la carga total de la batería
• Verificar las conexiones USB con GPS, UMI, tarjetas de adquisición de datos
9. CONCLUSIONES
Finalmente, se ha realizado la instrumentación del modelo autónomo a escala de un remolcador de altura necesaria para la realización de ensayos estáticos y dinámicos en aguas abiertas. Además, se ha perfeccionado el sistema software para esta plataforma, capaz de comunicar, capturar datos y actuar en el modelo físico del remolcador a escala.
Se ha verificado el correcto funcionamiento de la instalación, y se llevado a cabo una redistribución del cableado de la instalación eléctrica con el consecuente esquema eléctrico que permite de manera más rápida y sencilla la comprobación del correcto estado de las conexiones, la sustitución de elementos y la ampliación con instrumentos de medida más avanzados.
Queda de este modo, iniciado un proceso de investigación y estudio para llevar a cabo variedad de ensayos, posibles mejoras innovadoras, y futuros proyectos. Todo ello, dentro del marco experimental del Grupo I+D+I de Informática y Automática de la Universidad de Cantabria.
10. PRESUPUESTO DE MATERIALES
Elemento
Unidades
Precio
unitario
Precio total
(+IVA)
Modelo remolcador 1 4857,32 4857,32 Mesa de inercias 1 450 450 PC portátil 2 799,90 1599,80 UMI IG500 1 2947,66 2947,66 GPS RCB-LJ 1 54,73 54,73 Router 2 29,00 58,00Motor Maxon EC45 2 498,94 997,88
MMC-Q-EC-amplifier 70/10 2 398,81 797,62
TAD –DAQ NI USB-6008 2 181,00 362,00
Maxon GP42C 7.5NM 2ST KL 2 265,28 530,56 Acoplamientos 2 66,80 133,6 Servos 2 39,00 78,00 Hélices Raboesch 2 43,10 86,20 PWM Simple Servo 1V2 2 12,54 25,08 Baterías 12 V 10 19,90 199,00 Operacionales LM741 INT 8P 2 1,00 2,00 Soporte CI 8P 2 0,25 0,50 Europlaca Velleman 1 6,00 6,00 Regleta CI 2P 3 0,42 1,26 Resistencias 10 varios 6,00 Cableado 3 varios 25,00 Cajas estancas 2 12,55 25,10 3 en 1 1 3,00 3,00
Limpiador Kontakt Chemie® 1 9,78 9,78
Cinta aislante 1 1,00 1,00
Pesas 5 varios 25,00
Tornillería varios varios 10,00
Vaselina 1 3,00 3,00
11. BIBLIOGRAFÍA
LIBROS:• Fossen, Thor I. Guidance and Control of Ocean Vehicles. John Wiley &Sons,1994.
• L. V. Edward, Principles of naval architecture, The Society of Naval Architects and Marine Engineers, USA, 1989.
• T. Pérez, Ship motion control, course keeping and roll stabilization using rudder and fins, Springer, London, 2005. • Cesáreo Díaz Fernández. Elementos de Arquitectura Naval.
Barcelona, 1972.
• R. Taggart. Ship Design and Construction, The Society of Naval Architects and Marine Engineers, New York, 1980. PROYECTOS:
• “Construcción de modelos de buques para ensayos en aguas abiertas”. Departamento de Arquitectura y Construcciones Navales. Grupo Investigador CEHINAV. Canal de Ensayos Hidrodinámicos. E.T.S.I.N.- UPM. 2007.
• Valverde Saro, César. “Diseño de un Sistema de Gobierno Automatizado con Visual Basic 4.0. 2002.
• Proyecto VAMCoop:“Automatización de vehículos marinos para actuaciones en cooperación (Ref:DPI2003-09745-C04-04). • Experimentation Environment Autonomous Marine
Vehicles.Francisco Jesús Velasco González. Octubre 2006-septiembre 2009.
TESIS:
• López García, Eloy. Contribución al diseño de algoritmos de control para el gobierno y estabilización de buques. PhD Thesis, UPV/EHU. 2005
ARTÍCULOS:
• Velasco F. J., T. M. Rueda, E. Revestido, E. López, E. Moyano, and L. A. Esquibel. Experimentation environment for marine vehicles. Journal of Maritime Research, 3:3–18, 2006.