Diseño y construcción de un robot paralelo de configuración “delta” de cuatro grados de libertad
Texto completo
Figure
Outline
Documento similar
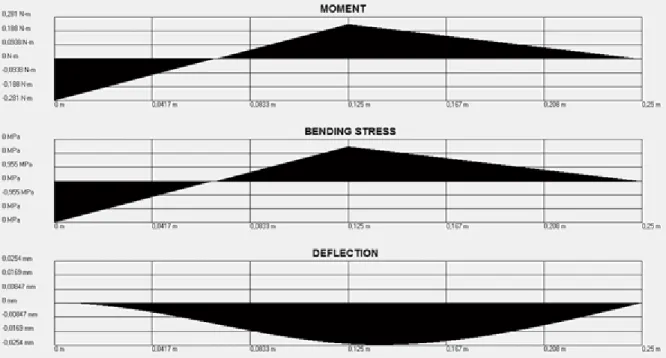
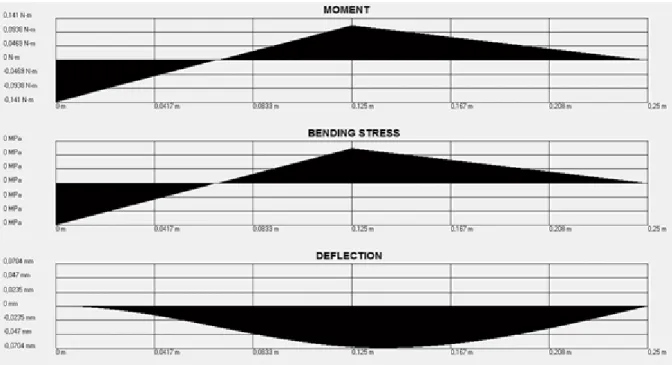
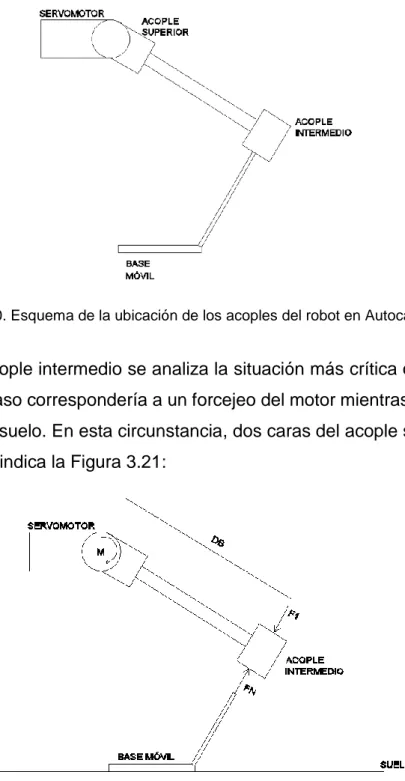
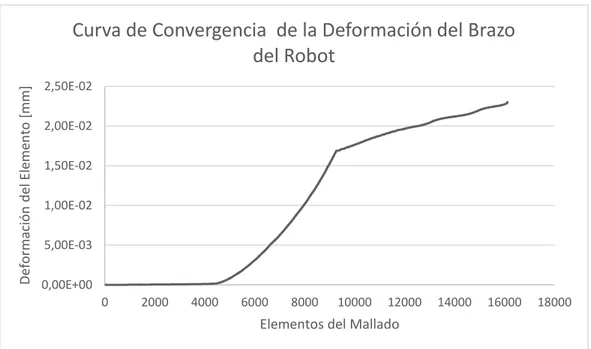
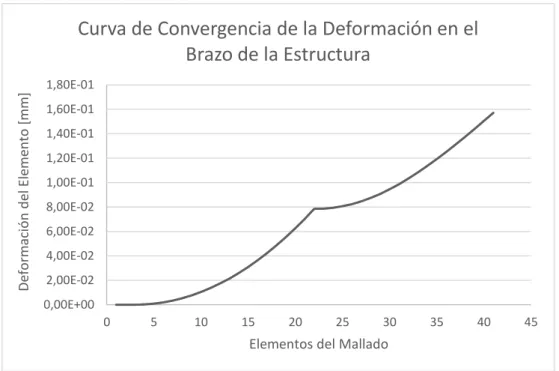
Los resultados obtenidos nos permiten visualizar una gráfica en la interfaz de usuario del sistema que refleja la distribución de fuerzas aplicadas sobre cada uno de los elementos
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
El desarrollo de una conciencia cáritas es esencial para identificar cuando un momento de cuidado se convierte en transpersonal, es necesaria para identificar
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
