Simulación de motores de inducción para diferentes estados de cargas
64
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubian” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419.
(3) Dedicatoria Le dedico mi primera obra de gran esfuerzo y envergadura a mi abuela Olvido, que donde quiera que esté, fue quien supo ser siempre guía indiscutible y de la cual supe tomar sus mejores consejos para llegar a mi meta final. A mis padres por el inmenso amor que siempre me han dado, por confiar cada día en mí, en mis propósitos, en mis sueños, porque siempre han contribuido en mi inspiración profesional. A mi abuela Migdalia y a mi abuelo Raúl por su confianza, amor e incondicional apoyo. A mi padrastro, a mi padrastro, a mi familia en general que sin su apoyo incondicional no hubiese podido llegar a este resultado..
(4) Agradecimientos A mis padres por ayudarme en todo lo que le fue posible. A mi hermano, mi padrastro y mis abuelos por estar siempre ahí y apoyarme. A toda mi familia por su ánimo y confianza durante mi formación profesional. A mi tutor MSc. Alberto Andrés Limonte por asesorarme en el desarrollo de este Trabajo de Diploma. A todas las personas que han dedicado parte de su tiempo para intercambiar ideas y ofrecer oportunas sugerencias. A todos los profesores de la carrera por su profesionalidad, respeto y sabiduría con que nos impartieron las clases y conferencias..
(5) RESUMEN Los motores trifásicos de inducción son ampliamente utilizados en la actualidad en una gran cantidad de aplicaciones industriales y comerciales. Dichos motores constituyen; de hecho, el tipo de máquina eléctrica rotatoria más usado como fuente de energía mecánica para el accionamiento de disimiles tipos de cargas, esta amplia aplicación está justificada sobre la base de sus características, que van desde su fortaleza constructiva, su relativamente bajo costo con respecto a otras máquinas eléctricas rotatorias, su también relativamente simple y económico mantenimiento y su fiabilidad. El análisis del comportamiento de las principales magnitudes del motor al operar cargas cuyos momentos varían en función de la velocidad puede dar indicios que contribuyan a una más acertada selección y explotación. La experimentación real para esa condiciones con cargas de diferentes tipos es engorrosa y relativamente costosa, elementos que con el desarrollo alcanzado por la simulación pueden simplificarse. El trabajo que se presenta tiene como objetivo general implementar modelos de la máquina de inducción que permitan; mediante la simulación, el análisis del comportamiento de sus magnitudes fundamentales al accionar diferentes tipos de cargas mecánicas. Para ello se desarrollan diferentes modelos con las herramientas del Matlab/Simulink. Los resultados obtenidos demuestran que el comportamiento de las magnitudes analizadas aunque aproximadamente similares en sus formas de variación exhibe diferencias en los tiempos de respuesta ante los cuatro tipos de carga clásicos.. Palabras Clave: Motor de inducción, modelos, cargas mecánicas, simulación..
(6) ÍNDICE RESUMEN .............................................................................................................................................. 5 ÍNDICE .................................................................................................................................................... 6 INTRODUCCIÓN ................................................................................................................................... 1 CAPÍTULO 1. modelación. 1.1. Generalidades de las máquinas de inducción, las cargas mecánicas y su 5. Introducción.......................................................................................................................... 5. 1.2 Conceptos básicos............................................................................................................... 5 1.3 Características generales de las máquinas de inducción. .................................... 7 1.4 Modelos dinámicos de motores de inducción ........................................................................ 9 1.4.1 Ecuaciones básicas........................................................................................................... 10 1.4.2 Características para estado estable y circuito equivalente:....................................... 17 1.5 Transformaciones de variables............................................................................................... 21 1.5.1 Transformación de Clarke. ............................................................................................... 22 1.5.2 Transformación de Park ................................................................................................... 23 1.6 Características mecánicas de los motores y regímenes estacionarios de trabajo del accionamiento eléctrico. ................................................................................................................. 25 1.7 Consideraciones finales del capítulo. .................................................................................... 28 CAPÍTULO 2. Modelos del motor trifásico con cargas mecánicas de diferentes tipos. 29 2.1. Introducción........................................................................................................................ 29. 2.2. Características de los bloques empleados para la modelación en Matlab/Simulink. 29. 2.2.1 Bloques eléctricos del toolbox Simscape. ..................................................................... 30 2.3. Descripción de los Modelos implementados ................................................................... 40. 2.3.1. Modelo del motor de inducción con carga de potencia constante. ...................... 40. 2.3.2. Modelos del motor de inducción trifásico con carga de momento constante .... 42. 2.3.3. Modelo del motor con carga del tipo momento proporcional a la velocidad. .......... 44.
(7) ÍNDICE. 2.3.4 Modelo del motor con carga del tipo momento proporcional a la velocidad al cuadrado. ...................................................................................................................................... 46 2.4. Consideraciones finales del capitulo ............................................................................ 48. CONCLUSIONES................................................................................................................................ 49 RECOMENDACIONES ...................................................................................................................... 50 BIBLIGRAFÍA ...................................................................................................................................... 51.
(8) INTRODUCCIÓN El desarrollo de la humanidad está indisolublemente ligado al descubrimiento y empleo de la energía en sus diferentes formas. Los inventos de los molinos hidráulicos y de viento hasta los actuales motores eléctricos y de combustión interna, pasando por la máquina de vapor han significado hitos en la elevación de la producción de bienes y servicios para satisfacer las necesidades de la sociedad y el nivel de vida de la misma. Los motores trifásicos de inducción son ampliamente utilizados en la actualidad en una gran cantidad de aplicaciones industriales y comerciales. Dichos motores constituyen; de hecho, el tipo de máquina eléctrica rotatoria más usado como fuente de energía mecánica para el accionamiento de disimiles tipos de cargas, esta amplia aplicación está justificada obre la base fundamentalmente de sus características, que van desde su fortaleza constructiva, su relativamente bajo costo con respecto a otras máquinas eléctricas rotatorias, su también relativamente simple y económico mantenimiento y por tanto su fiabilidad. Por tales afirmaciones; algunos autores [1], lo denominan ‘el caballo de batalla” de la industria moderna En sus aplicaciones estas máquinas tienen que accionar diferentes mecanismos, que van desde transportadores, elevadores, bombas de diferentes tipos, máquinas herramientas y otros, todos los cuales presentan características mecánicas; esto es características de momento o torque vs velocidad que son propias de cada aplicación. Así, se clasifican dichas cargas en cuatro grandes grupos, que son: carga con momento constante, carga con momento proporcional a la velocidad, carga con momento proporcional a la velocidad al cuadrado y carga de potencia constante [2]. ` Esto es un tema no abordado a profundidad en el pregrado, donde el énfasis principal se pone en las determinación de los parámetros del motor cuando opera en el punto de operación estable al accionar uno de los tipos de cargas anteriores. Adicionalmente a esto tampoco se dispone de todos estos tipos de cargas en los laboratorios, ni de la instrumentación requerida para tales análisis, por lo que la experimentación también está restringida. Con el desarrollo de los medios de cómputo, cada vez es más efectiva la construcción de modelos, algunos más aproximados y otros más complejos, que permiten, mediante software profesionales o no, analizar de alguna manera cual es el comportamiento de las diferentes variables del motor de inducción 1.
(9) INTRODUCCIÓN. trifásico y compararlas al accionar diferentes cargas, permitiendo llegar a conclusiones útiles, tanto para el diseño, la explotación como para el mantenimiento de los mismos. Necesidad de resolver el problema Para resolver el problema de la no insuficiencia de instalaciones y equipos para la experimentación del comportamiento de motores de inducción al accionar diferentes tipos de cargas mecánicas, la modelación y simulación mediante software permite un acercamiento más detallado y de relativamente menor costo. Dicha modelación permitirá brindar una herramienta que permita tanto en pregrado como a los especialistas que investigan o están relacionados con la selección, explotación y mantenimiento de estas máquinas, realizar un análisis más adecuado del comportamiento del motor de inducción trifásico al accionar con diferentes tipos de carga Problema científico de la investigación: ¿Es posible valorar el efecto de diferentes tipos de cargas mecánicas sobre las magnitudes fundamentales de comportamiento del motor de inducción trifásico mediante el empleo de modelos y la simulación? Para dar respuesta este problema científico se concibe para el presente trabajo el objetivo general siguiente: Objetivo General: Implementar modelos de la máquina de inducción en Matlab/Simulink que permitan; mediante la simulación, el análisis del comportamiento de sus magnitudes fundamentales al accionar diferentes tipos de cargas mecánicas. Objetivos específicos: 1. Establecer el marco teórico-conceptual sobre los modelos de para el análisis del comportamiento de motores de inducción al operar diferentes cargas mecánicas. 2. Seleccionar los modelos más adecuados a implementar para cada condición de carga. 3. Implementar los modelos en Matlab/Simulink 4. Evaluar los resultados obtenidos mediante experimentación o comparación con resultados publicados disponibles. Para lograr los objetivos anteriores se plantea la siguiente tarea técnica: 2.
(10) INTRODUCCIÓN. 1. Búsqueda y análisis de la información bibliográfica relacionada con los modelos de máquinas de inducción y los diferentes tipos de cargas mecánicas 2. Selección de los modelos del motor de inducción en Matlab/Simulink para la simulación del comportamiento al accionar diferentes tipos de cargas mecánicas 3. Implementación de los modelos en el MATLAB/Simulink.. 4.. Escritura del trabajo.. Como conveniencia de este trabajo se puede plantear que el mismo servirá para profundizar en la modelación de motores, lo cual puede permitir al menos en principio, incluir y/o perfeccionar la impartición de estos contenidos en el pregrado o el postgrado, además de validar la eficacia de determinados modelos para una condición anormal de operación dada. En cuanto a la relevancia social el trabajo permitirá mejorar la preparación de los futuros egresados, así como de profesionales de la producción y los servicios relacionados con la explotación de esta máquina, sobre todo debido a la falta de equipamiento adecuado para la experimentación real al mostrar herramientas en Matlab/Simulink para poder analizar el comportamiento de motores de inducción trifásicos al operar diferentes tipos de cargas mecánicas En lo referente a las implicaciones prácticas el trabajo puede contribuir a dar indicios de el comportamiento del motor de inducción trifásico al operar diferentes tipos de cargas mecánicas en los casos en que por limitaciones objetivas de disponibilidad y/o costo del equipamiento necesario para experimentación real así lo dicten el análisis del comportamiento de un motor determinado ante una condición de operación no deseada (como la presencia de sobretensiones en su alimentación y otras) Como valor teórico se puede alegar que aunque los modelos que se emplearán, serán el resultado. de. investigaciones. anteriores,. es. posible. que. su. implementación. en. MATLAB/Simulink aporte un cierto valor teórico, al análisis del comportamiento del motor ante las mencionadas condiciones de operación con diferentes tipos de carga La utilidad metodológica de los resultados del trabajo consiste en mostrar cómo se llega a los mismos y por lo tanto pueden ser replicados en cualquier industria o servicio que tenga motores de inducción que puedan estar sometidos a las mencionadas condiciones de carga, así como puede servir también de material para la docencia de pre y posgrado 3.
(11) INTRODUCCIÓN. Estructura del Trabajo El trabajo que se presenta está estructurado por dos Capítulos: El primer Capítulo, denominado Generalidades de las Máquinas de Inducción las Cargas y su Modelación, abarca lo correspondiente con el marco teórico de las máquinas de inducción, sus características generales y ecuaciones básicas de estado estable y modelos dinámicos. Además se analizan las características mecánicas de las máquinas de inducción y sus principales tipos de cargas. El segundo Capítulo, denominado Modelos de Motor Trifásico con Cargas de Diferentes Tipos, se dedica a exponer los modelos y herramientas utilizadas para su implementación, en este caso fundamentalmente los modelos disponibles en la librería SimPower System y Simscape del Matlab/Simulink R-2015. Se implementan modelos a partir de los bloques disponibles en dichas librerías para simular el comportamiento de la máquina de inducción para diferentes estados de carga. Al final se exponen y se analizan los resultados obtenidos de las corridas de corriente, velocidad y torque electromagnético.. 4.
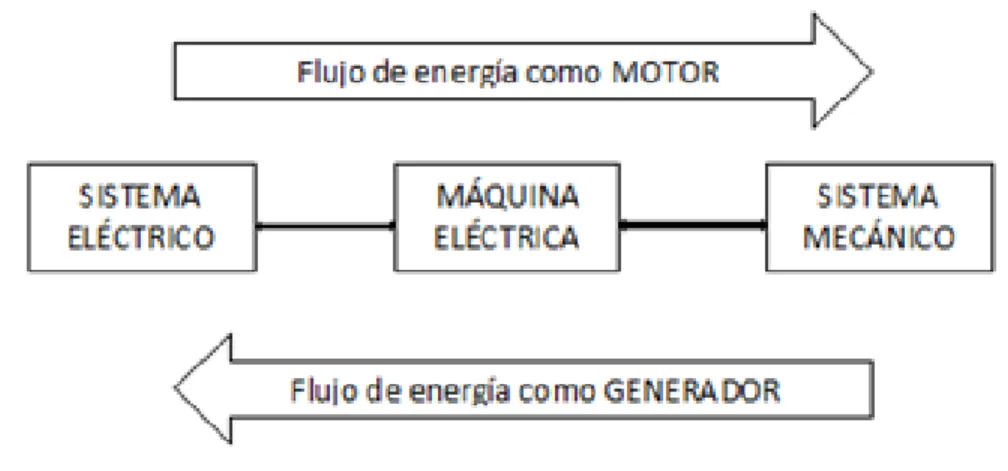
(12) CAPÍTULO 1. Generalidades de las máquinas de inducción, las cargas mecánicas y su modelación.. 1.1 Introducción En este Capítulo se presentan los resultados de la caracterización del objeto de estudio, en esta caso las características y conceptos del motor de inducción asincrónico trifásico, así como las transformaciones de variables empleadas para la construcción de modelos más asequibles para la modelación y simulación de la operación del mismo y también las características de las cargas mecánicas que dicho motor puede accionar en sus aplicaciones agrupadas en la forma clásica a partir de la relación del momento, par o torque de las mismas con la velocidad.. 1.2 Conceptos básicos Las máquinas eléctricas rotatorias (MER); al operar en régimen motor son la fuente fundamental de energía mecánica en la vida moderna. Las MER; sea cual sea su tipo, función o potencia son convertidores electromecánicos capaces de convertir energía desde un sistema eléctrico (en forma de energía del campo electromagnético) a un sistema mecánico o viceversa [1] Las formas constructivas que adoptan y el modo en que esta conversión tiene lugar pueden ser diferentes de un tipo a otro, pero el fundamento físico de todos esos procesos de conversión es único. Las máquinas eléctricas actúan por tanto como interface entre un sistema eléctrico y un sistema mecánico, como se muestra en la figura 1. Cuando el flujo de potencia se dirige desde el sistema eléctrico al sistema mecánico se plantea que la máquina trabaja en régimen motor y cuando lo hace a la inversa se dice que la máquina está trabajando en régimen generador.. 5.
(13) Figura 1.1 Esquema indicando el funcionamiento en régimen motor o generador de una máquina eléctrica rotatoria. Desde un punto de vista simple, y con un enfoque generalizador, se puede afirmar que cualquier MER está formada básicamente por los elementos siguientes [2]: a.. Uno o más circuitos eléctricos.. b.. Un sistema mecánico con al menos un grado de libertad.. c.. Un circuito magnético común a los diferentes circuitos. eléctricos y que incluye el sistema mecánico. Otro enfoque más práctico de las MER y que se ilustra en la figura 1.2 plantea que las mismas están normalmente constituidas por una parte fija llamada estator y una parte móvil llamada rotor, normalmente el rotor gira en el interior del estator. Al espacio de aire existente entre ambos se le denomina entrehierro.. Figura 1.2 Partes físicas de una MER. 6.
(14) Para el estudio de las MER; por el enfoque tradicional [2] y atendiendo a diversos criterios las mismas pueden clasificarse como:. Figura 1.3 Clasificación de las MER según [2]. Como el presente trabajo se enfoca a la MER de inducción, en los próximos epígrafes se describen las características de las mismas.. 1.3 Características generales de las máquinas de inducción. Las máquinas de inducción constituyen “los caballos de batalla” de la industria moderna debido a que sus características constructivas son relativamente simples y fuertes, presentan menor costo de manufactura y explotación, su mantenimiento es más simple, además tienen buenas características de funcionamiento en cuanto a indicadores de mantenimiento. Otra razón por la cual son las más utilizadas industrialmente es que los procesos de arranque y control de velocidad son en la actualidad, con el desarrollo alcanzado por la electrónica de 7.
(15) potencia, muy competitivos y eficaces al utilizar los variadores de frecuencia. En este tipo de máquinas tanto el rotor como el estator son cilíndricos y disponen de ranuras regularmente espaciadas y paralelas a las generatrices de los cilindros, situadas en la cara interior del estator [1]. Las máquinas asincrónicas pueden funcionar como generador o como motor. Su uso más frecuente es como motor. Las mismas al funcionar como motor solo son alimentadas por el estator, el campo magnético que ese establece en este devanado estatórico hace que se induzcan corrientes que van a circular por la parte rotórica de la misma, por esta razón se denominan máquinas de inducción. Además, reciben el nombre de máquinas asincrónicas ya que la velocidad de giro del rotor no puede, por principio de funcionamiento [2] ser igual a la de sincronismo impuesto por la frecuencia de la red.. El principio de funcionamiento de la máquina asincrónica se basa en el concepto de campo magnético giratorio. El descubrimiento original fue publicado en 1888 por el profesor Galileo Ferraris en Italia y por Nicola Tesla en los Estados Unidos. Ambos diseños de motores asíncronos se basaban en la producción de campos magnéticos giratorios con sistemas bifásicos, es decir utilizando dos bobinas a 90 grados alimentados con corrientes en cuadraturas. [2] El estator como el nombre lo indica constituye la parte fija de la máquina y está formado por placas apiladas de material ferromagnético con ranuras, donde están alojados los conductores como se muestra en la figura 1.4. Figura 1.4 Estator de una máquina de inducción asincrónica.. El rotor constituye la parte giratoria de la máquina y de hecho, sirve para hacer una 8.
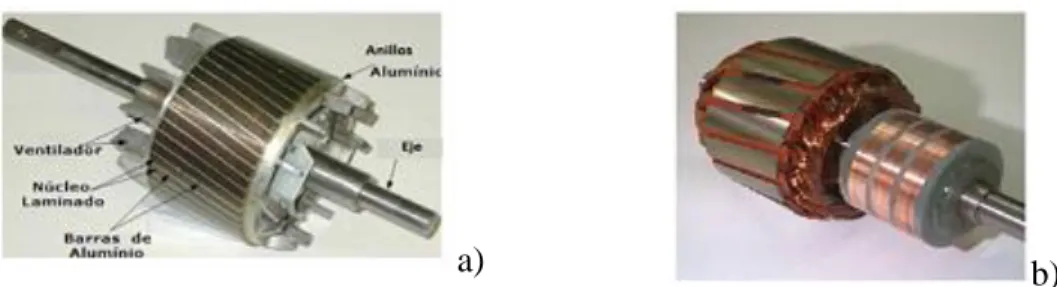
(16) clasificación de las mismas, de acuerdo con sus características constructivas estos pueden ser de dos tipos: Jaula de ardilla (fig. 1.5 a): Este presenta un núcleo de material ferromagnético con ranuras, barras (Al o Cu) que forman los conductores en los cuales se inducirá una fem rotacional, anillos extremos que cortocircuitan las barras en sus extremos (para que exista un circuito cerrado que permita la circulación de corriente y por tanto el establecimiento de un campo magnético que interactúe con el campo magnético del estator, produciendo un momento al tratar de alinearse el eje.[12] Es un devanado en cortocircuito. Las barras normalmente tienen cierta inclinación para tratar de asegurar. Rotor bobinado (fig. 1.5 b): Presenta también un núcleo de material ferromagnético con ranuras, pero a diferencia del anterior en este lo que se coloca en dichas ranuras es un devanado trifásico de cobre, anillas – escobillas y el eje. Este devanado trifásico tiene salida por las anillas, sobre las cuales descansan las escobillas para conectarlo externamente en cortocircuito o a algún otro elemento externo (por ejemplo, en sus inicios se empleaba un banco de resistencia trifásico, en la actualidad, se pueden conectar convertidores estáticos, lo que da origen a la denominada máquina de inducción doblemente alimentada, muy utilizada en aerogeneradores.). a). b). Figura 1.5 Rotores de una máquina de inducción trifásica a) rotor de jaula ardilla b) rotor bobinado. 1.4 Modelos dinámicos de motores de inducción Típicamente los motores consumen entre el 60 y el 70 % de la energía total suministrada por un sistema de potencia. Por lo tanto, la dinámica atribuible a los motores son normalmente los aspectos más significativos de las características dinámicas de las cargas del sistema.. 9.
(17) Los motores asincrónicos en particular son los más utilizados en la industria, por tanto, su modelación es de suma importancia en estudios de estabilidad. La teoría dinámica clásica de máquinas asíncronas se basa en el uso sistemático de vectores espaciales. De acuerdo con el enfoque de Clarke [3] (el cual se analizará en posteriores epígrafes), el sistema electromagnético-mecánico se describe, en condiciones cuasi estáticas, mediante ecuaciones diferenciales ordinarias. De esta forma, la máquina eléctrica se considera como un circuito constante equivalente y concentrado en los ejes de Clarke y los fenómenos de propagación están ausentes. Las máquinas de inducción se pueden modelar, en frecuencias industriales, con redes de constantes equivalentes agrupadas. [13] 1.4.1 Ecuaciones básicas Los devanados del estator de una máquina de inducción trifásica son similares a los de una máquina sincrónica [7]. Cuando son aplicadas corrientes trifásicas balanceadas de la misma frecuencia en (Hz), asociada a dichas corrientes y producto de las fuerzas magnetomotrices que las mismas producen aparece un campo magnético rotatorio de magnitud y velocidad constante denominada velocidad sincrónica y que está dada por: (rpm) (1.1) Donde f es la frecuencia y p el número de polos. Como se refleja en la literatura clásica [1,2] ese campo magnético induce fuerzas electromotrices de origen rotacional en los devanados o barras del rotor ( de aquí el nombre de máquinas de inducción) en las que al circular corrientes, estas a su vez producirán un campo magnético, este último trata de alinearse con el del estator produciendo un momento, como ese momento hace girar al rotor en el mismo sentido que el del campo no es posible que el rotor gire a la misma velocidad que el campo del estator y de ahí la otra denominación de máquina asincrónica. Se conoce con el nombre de deslizamiento a la magnitud s, que no es más que la velocidad relativa entre campo rotatorio del estator y la velocidad de giro del rotor con respecto a la velocidad sincrónica, es más común darla en por unidad que en porciento. El deslizamiento se define mediante la siguiente ecuación: (1.2) 10.
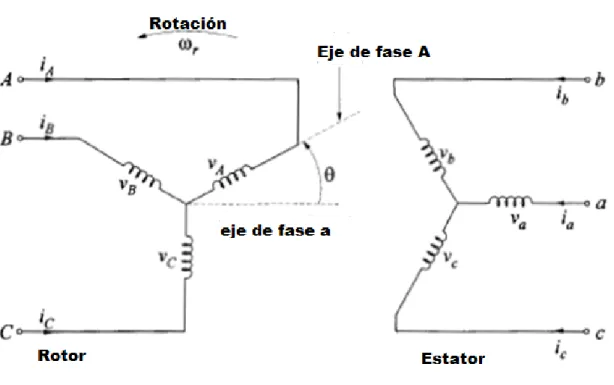
(18) Los valores típicos de resbalamiento a potencia nominal están entre 0.02 y 0.05, aunque en esto influye la resistencia del rotor.. Figura 1.6. Diagrama esquemático con la representación espacial de los devanados del estator y rotor para una máquina de inducción trifásica.. En la figura 1.6, θ es definido como el ángulo por el cual el eje de la fase A del devanado del rotor se adelanta al eje de la fase a del devanado del estator in la dirección de la rotación. Con la velocidad angular del rotor constante ( r ) en rad/s,. r t. (1.3). Con un deslizamiento constante S. 1 s s t. (1.4). Donde s es la velocidad angular del campo del estator en rad/s. Despreciando la saturación, histéresis y corrientes parásitas, y asumiendo la distribución del flujo de ondas puramente sinusoidal, las ecuaciones de la máquina pueden ser escritas como sigue. Ecuaciones de voltaje del estator: 11.
(19) (1.5) (1.6) (1.7) Ecuaciones de voltaje del rotor: (1.8) (1.9) (1.10) En las ecuaciones anteriores, representa las concatenaciones de flujo de los devanados denotado por el subíndice correspondiente,. la resistencia de fase del estator,. la. resistencia de fase del rotor, y p el operador diferencial d/dt. Las direcciones positivas de las corrientes en los devanados son las indicadas en la figura 1.6. La concatenación de flujos en la fase de los devanados del estator en cualquier instante, está dada por:. a Laa ia Lab ib ic LaA i A cos i B cos 120 0 iC cos 120 0 . (1.11). Donde Laa es la inductancia propia de los devanados del estator, Lab es la inductancia mutua entre los devanados del estator, y LaA es el valor máximo de la inductancia mutua entre los devanados del estator y rotor. Expresiones similares son aplicadas. a las. concatenaciones de flujo de los devanados b y c del estator. Las concatenaciones de flujo en la fase A del devanado del rotor están dadas por:. A L AA i A L AB ib ic LaA ia cos ib cos 120 0 ic cos 120 0 . (1.12). Expresiones similares son aplicadas a B y C . Sin no existe corriente de neutro debido a las conexiones de los devanados o a condiciones de balance, se cumple que:. 12.
(20) i a ib i c 0. (1.13). i A i B iC 0. Permitiendo entonces llegar a:. Lss Laa Lab. (1.14). Lrr L AA L AB. Entonces las expresiones a y A pueden ser reescritas como:. a Lss ia LaA i A cos i B cos 120 0 iC cos 1200 . (1.15). A Lrr i A LaA ia cos ib cos 120 0 ic cos 1200 . (1.16). La transformación de variables de fase a variables de ejes d-q. Las ecuaciones anteriores para la máquina de inducción pueden ser simplificadas por una transformación apropiada de las variables de fase en componentes a lo largo de la rotación de los ejes. Para la máquina de inducción el marco de referencia preferido es con los ejes rotando a la velocidad sincrónica [8,9]. El eje q se asume 90˚ adelantado al eje d en la dirección de la rotación. La transformación de las corrientes de las fases del estator en las variables d y q es como sigue:. . . . . . 2 ia cos s t ib cos s t 120 0 ic cos s t 120 0 3 2 iqs ia sin s t ib sin s t 120 0 ic sin s t 120 0 3. ids . . . . . . (1.17). La transformada inversa es:. ia ids cos s t iqs sin s t. cos t 120 i. sin t 120 . ib ids cos s t 120 0 iqs sin s t 120 0 ic ids. 0. s. (1.18). 0. qs. s. Transformaciones similares se aplican a las concatenaciones de flujo del estator y a voltajes del estator. Ahora se identifica las transformaciones correspondientes del rotor en relación con la rotación sincrónica de los ejes d y q. con r como el ángulo por el cual el eje “d” adelanta el 13.
(21) eje de la fase A del rotor. Si el deslizamiento del rotor es s , el eje d está adelantado con respecto a un punto del rotor en específico.. d r p r s s dt. (1.19). La transformación de las corrientes del rotor en las componentes d y q es como sigue:. . . . . . 2 i A cos r i B cos r 120 0 iC cos r 120 0 3 2 iqr i A sin r i B sin r 120 0 iC sin r 120 0 3 idr . . . . . . (1.20). La transformada inversa es:. i A idr cos r iqr sin r. cos. 120 i. sin . 120 . i B idr cos r 120 0 iqr sin r 120 0 iC idr. 0. r. qr. (1.21). 0. r. Ecuaciones básicas de la máquina en el marco de referencia d-q De las ecuaciones 1.3 y 1.4. s t r. (1.21). De las ecuaciones 1.15 y 1.16 se puede demostrar que las concatenaciones de flujo del estator y rotor pueden ser expresados en términos de los componentes d y q como sigue: Concatenaciones de flujo del estator:. ds Lss ids Lm idr qs Lss iqs Lm iqr. (1.22). Concatenaciones de flujo del rotor:. dr Lrr idr Lm ids qr Lrr iqr Lm iqs. (1.23). Con Lm 3 2 LaA Los voltajes del estator en términos de d y q son:. 14.
(22) v ds Rs ids s qs p ds. (1.24). v qs Rs iqs s ds p qs Y los voltajes en el rotor son:. v dr Rr idr p r qr p dr. v qr Rr iqr p r dr p qr. (1.25). El término p r en la ecuación 1.25 es el deslizamiento de la velocidad angular dado por:. p r ss. (1.26). Esto representa la velocidad angular relativa entre el rotor y los ejes de referencia d y q. Las corrientes i ds y i qs representan corrientes en devanados ficticios rotando a la velocidad sincrónica y permaneciendo así en las posiciones en que sus ejes siempre coinciden con los ejes d y q respectivamente. Una interpretación similar se aplica a las corrientes del rotor i dr y i qr .Los términos s qs y s ds en las ecuaciones de voltaje del estator representan voltajes creados en los devanados estacionarios por la rotación sincrónica de las ondas de flujo. Similarmente, los términos p r qr y p r dr en las ecuaciones de voltaje del rotor representan los voltajes creados en los devanados del rotor los cuales se mueven a la velocidad de deslizamiento p r s s con respecto a la rotación sincrónica de las ondas de flujo. Para acción motora, s y p r son positivos. Recíprocamente, para acción generadora, s y p r son negativos. Potencia y torque eléctrico: La potencia de entrada instantánea en el estator es:. Ps va ia vb ib vc ic En términos de los componentes d y q la expresión anterior se convierte en. Ps . 3 vds ids vqs iqs 2. (1.27). Similarmente la potencia de entrada instantánea en el rotor es:. 15.
(23) Pr . 3 vdr idr vqr iqr (1.28) 2. De la ecuación 1.25, los términos asociados con v dr y v qr son qr p r y dr p r , respectivamente. Substituyendo en la ecuación 1.28 la potencia asociada con la velocidad voltaje es:. 3 dr iqr qr idr p r 2. . La velocidad del rotor con respecto a los ejes d y q es p r 2 pf . El torque electromagnético es. Te . 3 qr idr dr iqr p f 2 2. (1.29). Ecuación de aceleración: Para funcionamiento estable del conjunto motor eléctrico-carga mecánica el torque electromagnético desarrollado debe ser igual al torque o momento demandado por la carga mecánica accionada por el motor más el torque necesario para vencer el momento resistivo de las pérdidas rotacionales. Si hay una desigualdad entre el torque electromagnético y el torque de la carga mecánica (Tm), el torque diferencial acelera. la masa del rotor.. Consecuentemente,. Te Tm J. d m d 2 J 2 dt dt. (1.30). Donde m es la velocidad angular del rotor en radianes mecánicos por segundo, y J es el momento polar de inercia del rotor y la carga conectada. El torque de la carga varía con la velocidad. Una expresión común usada para el torque de la carga es:. Tm T0 r . m. (1.31). Donde r es la velocidad del rotor expresada en por unidad de la velocidad sincrónica. Una expresión alternativa usada a menudo para el torque de carga es. . Tm T0 A r2 B r C. . (1.32) 16.
(24) Pr . 3 vdr idr vqr iqr 2. (1.33). De la ecuación 1.25, los términos asociados con v dr y v qr son qr p r y dr p r , respectivamente. Substituyendo en la ecuación 1.28, la potencia asociada con la velocidad voltaje es:. 3 dr iqr qr idr 2. p r. La velocidad del rotor con respecto a los ejes d y q es p r 2 pf . El torque electromagnético es. Te . 3 qr idr dr iqr p f 2 2. (1.34). 1.4.2 Características para estado estable y circuito equivalente: Existe similitud entre el motor asincrónico y los transformadores, ambos trabajan con C.A., el flujo magnético en su circuito juega un papel importante en la transferencia de energía eléctrica entre sus devanados, es de forma inductiva y ello facilitará la comprensión y derivación de las expresiones matemáticas, la obtención del circuito equivalente y el diagrama fasorial para el motor asincrónico, cuando está operando en estado estable. El circuito equivalente de un motor asincrónico tiene como objetivo, al igual que en el caso de los transformadores, el obtener una red que explique el comportamiento de la máquina, pero en la que no aparezca la acción de transformadora entre los circuitos de primario y secundario, lo cual trae como consigo el reducir las magnitudes de un devanado al otro, generalmente del rotor al estator. [2] Un modelo matemático de la máquina asincrónica como el representado por su circuito equivalente, no serviría de nada si no se pudiese obtener el valor numérico de sus parámetros para cada motor en particular. Esto se efectúa por medio de los ensayos de marcha en vacío y de rotor bloqueado.[1]. 17.
(25) Figura 1.7 Circuito equivalente por fase de un motor asincrónico trifásico. Con el circuito del rotor ya referido al estator y donde el voltaje de entrada es Vs, se pueden unir eléctricamente el circuito de primario y secundario y obtener el circuito equivalente de una fase del motor de inducción como se muestra en la figura 1.7 Donde Xs y Rs son la reactancia y resistencia por fase en el estator respectivamente Xr y Rr son la reactancia y resistencia por fase en el rotor respectivamente Vs es el voltaje aplicado al devanado del estator que hace circular una corriente Is como se muestra en la figura 1.7 (Xm) es una reactancia inductiva conocida como reactancia de magnetización como resultado de la proporcionalidad entre la corriente de magnetización y la fem E1 y representa el efecto del flujo mutuo. La potencia transferida a través del entrehierro del motor es. Pag . Rr 2 Ir s. (1.35). La pérdida de resistencia del rotor es. Plr Rr I r2. (1.36). Además la potencia mecánica transferida al eje es. Psh Pag Plr . Rr 2 1 s 2 I r Rr I r2 Rr Ir s s. (1.37). 18.
(26) La figura anterior representa los valores por fase. Para un motor trifásico, el torque electromagnético desarrollado es:. Te . 3Psh. (1.38). m. Donde m es la velocidad angular del rotor en rad/s mecánicos dado por:. m r. 2 2 s 1 s pf pf. (1.39). Entonces. Te 3. Pf R r 2 Ir 2 s s. (1.40). Donde s 2f y p f es el número de polos. Para operación balanceada estado estable, las corrientes del estator pueden ser escritas como:. ia I m cos s t . cos t 120 . ib I m cos s t 120 0 ic I m. (1.41). 0. s. Donde alfa es el ángulo de fase de ia con respecto al tiempo de origen. Aplicando la transformación d-q, tenemos. ids I m cos iqs I m sin . (1.42). Así, para operación balanceada estado estable las corrientes del estator aparecen como corrientes directas en el marco de referencia d-q. Expresiones similares se aplican a los voltajes del estator y corrientes del rotor. De la ecuación 1.21, la corriente del estator puede ser escrita como. . is ia ids cos s t iqs sin s t ids cos s t iqs cos s t 900. . (1.43). Usando Is para denotar en por unidad la corriente del estator rms, la ecuación 1.41 puede ser escrita en forma fasorial: 19.
(27) ~ I s I ds jI qs. (1.44). Donde Ids ids / 2 y Iqs iqs / 2 . En similar manera los voltajes de fase del estator y las corrientes de fase del rotor pueden ser expresadas de la forma fasorial:. ~ Vs vds jvqs / 2. (1.45). ~ I r idr jiqr / 2. (1.46). Bajo las condiciones de estado estable, los términos p en las ecuaciones 1.24 y 1.25 desaparecen. Sustituyendo en la ecuación 1.24 las expresiones de las concatenaciones de flujo dadas por la ecuación 1.22, se puede escribir. v ds Rs ids s Lss iqs s Lm iqr v qs Rs iqs s Lss ids s Lm idr. (1.47). De las ecuaciones 1.43 a la 1.46, se tiene. . ~ ~ ~ ~ ~ ~ ~ ~ Vs Rs I s j s Lss I s j s Lm I r Rs I s j s Lss Lm I s j s Lm I s I r ~ ~ ~ ~ Rs I jX s I s jX m I s I r. . . . (1.46). Donde. X s s Lss Lm = reactancia de dispersión del estator.. X m s Lm = reactancia de magnetización. Con el rotor cortocircuitado v dr v qr 0 . De las ecuaciones 1.22, 1.24 y 1.25, se tiene. v dr 0 Rr idr s s Lrr iqr Lm iqs . v qr 0 Rr iqr s s Lrr idr Lm ids . (1.48). De las ecuaciones 1.43, 1.45 y 1.48 se pueden escribir. . R ~ ~ ~ ~ R ~ ~ ~ ~ Vs 0 r I r j s Lrr I r j s Lm I s r I r jX r I r jX m I s I r s s Donde. X r s Lrr Lm = reactancia de dispersión del rotor 20. . (1.49).
(28) 1.5 Transformaciones de variables Para el análisis del comportamiento de las máquinas eléctricas mediante la modelación y simulación son usados los cambios o transformaciones de variables para eliminar las variaciones de inductancia en el tiempo [5]. Para contribuir a aclarar los conceptos de la transformación de variables antes mencionada para el análisis de las máquinas, es conveniente mencionar un ejemplo más conocido que en este caso es el método de componentes simétricas desarrollado por Fortescue usa una compleja transformación para descomponer las fases abc: (1.50) La variable f en la ecuación 1 puede ser la corriente, voltaje, o flujos y la transformación está dada por: (1.51). Donde. .Su inversa está dada por: (1.52). La trasformación de componentes simétricas es igualmente aplicable a vectores de estado estable cantidades instantáneas. Otra transformación comúnmente usada es la polifásica o transformación bifásica ortogonal. Para n fases o el caso de dos fases, esto puede estar expresado de forma más compacta mediante: (1.53) Donde. (1.54). 21.
(29) Y. es el ángulo eléctrico entre el eje magnético adyacente del devanado de fase n. uniformemente distribuido. El coeficiente. , es introducido para lograr la transformación de. potencia invariante.. Figura 1.8 Relación entre las cantidades αβ y abc.. Para implementar las transformaciones existen en la literatura [10] dos transformaciones básicas, que toman el nombre de sus autores, las mismas se explican a continuación. 1.5.1 Transformación de Clarke. Esta transformación también es conocida como transformación (α, β, o).El uso de vectores Clarke en el espacio-tiempo permite la introducción del acoplamiento mutuo entre fases. La transformación de Clarke no modifica el carácter físico del modelo considerado; en particular, también los modelos transformados son de tipo hiperbólico y describen fenómenos de propagación, similares al modelo original (4) en el dominio de fase. Se aplica en la máquina cuando se quiere considerar la referencia en el estator [10] Las variables estacionarias de dos fases de la transformación de Clarke son denotadas como α y β. Como se muestra en la Figura 1.8 el eje α coincide con el eje magnético de la fase a y el eje β está en atraso con respecto al eje a en π/2. Solamente así la transformación es bidireccional, una tercera variable conocida como la componente de secuencia cero es adicionada: (1.55) Donde la transformación de la matriz. está dada por:. 22.
(30) (1.56). La transformación inversa:. (1.57). 1.5.2 Transformación de Park La transformación de Park es otra bien conocida transformación de tres fases a dos fases en el análisis de las máquinas eléctricas trifásicas. La ecuación que describe la transformación es de la siguiente forma [10]: (1.58) Donde. está definida como:. (1.59). Y su inversa está dada por:. (1.60). Figura 1.9 Relación entre los ejes de dq y abc (tomado de [10]). 23.
(31) La transformación de Park es usada para transformar los elementos del estator de las máquinas sobre una estructura de referencia dq que es fijada al rotor, con un eje d positivo alineado con los ejes magnéticos en el campo del devanado. El eje q positivo es definido como el que adelanta le eje d positivo en π/2 grados eléctricos en la transformación original de Park. El voltaje interno está a lo largo del eje positivo q. Algunos autores definen el eje q como retrasado con respecto al eje d por π/2. Definido de esta manera, el eje q coincide con el voltaje inducido, el cual es el negativo del voltaje interno. La transformación con el eje q retrasado al eje d está dada por:. (1.61). Otros usan una transformación qd0 en el cual el eje q adelanta al eje d y la transformación es usualmente expresada en términos del ángulo,. , entre el eje q y el eje a, como muestra en. la Figura 1.7: (1.62) Donde. (1.63). Con una inversa dada por:. (1.64). La relación entre. y. , la cual está definida en la transformación original de Park es:. (1.65) Sustituyendo la relación citada anteriormente fórmulas trigonométricas: (1.66) 24. y haciendo uso la reducción de.
(32) (1.67) Se demuestra que las dos transformaciones. y. , son básicamente las. mismas, excepto por el orden de las variables d y q. Concluyendo este epígrafe se puede decir que las estructuras de referencia se especifican para realizar la conversión de variables de los voltajes de entrada (referencia abc) a la estructura de referencia de ejes dq y las corrientes de salida (en la estructura de referencia dq) a la estructura de referencia abc. En los modelos de la máquina de inducción que brinda el Matlab/Simulink se brinda la posibilidad de escoger entre las transformaciones de estructuras de referencias siguientes: . Rotor (transformación de Park). . Estacionaria (transformación de Clarke o (α,β,0)). . Sincrónica. La selección de la estructura de referencia afecta las formas de onda de todas las variables dq. También afecta la velocidad de simulación y en ciertos casos la exactitud de los resultados. En [5] se brindan las recomendaciones siguientes: . Usar la estructura de referencia estacionaria si los voltajes de estator son o bien desbalanceados o discontinuos y los voltajes del rotor son balanceados o cero.. . Usar la estructura de referencia en el rotor si los voltajes del rotor son desbalanceados o discontinuos y los voltajes del estator son balanceados. . Usar las estructuras de referencia estacionaria o sincrónica si todos los voltajes son balanceados y continuos.. 1.6 Características mecánicas de los motores y regímenes estacionarios de trabajo del accionamiento eléctrico. El régimen estacionario de trabajo del accionamiento eléctrico se determina a partir de las condiciones de momento dinámico igual a cero. Este régimen está caracterizado por el trabajo a velocidad constante del motor eléctrico, los momentos del motor y la carga constantes en el tiempo e igual entre sí. Debido a que el momento desarrollado por el motor eléctrico en régimen estacionario, es una función de la velocidad, la igualdad. solo es. posible si el momento resistivo de la carga es constante o función, también de la velocidad.[6] 25.
(33) Se denomina característica mecánica del motor a la dependencia que existe entre su velocidad angular y el momento por el desarrollado, lo cual puede expresarse por: .De igual manera se puede definir como característica del mecanismo a la relación que existe entre su velocidad y el momento requerido por el mismo: anteriormente expuesto puede también expresarse por las funciones inversas:. .Lo ;. . Para el motor el momento de la carga, en esencia constituye una variable independiente. La función. muestra las propiedades de carga del motor, o sea, indica cómo cambia la. velocidad con la variación del momento de la carga. Para el mecanismo con momento pasivo, al contrario, el argumento lo constituye la velocidad, debido a que el momento surge como una reacción al movimiento. [11] La función muestra que el momento surge en el mecanismo si él es movido a una u otra velocidad. Los mecanismos industriales poseen variadas formas de sus características mecánicas. Sin embargo, se pueden obtener mediante la aplicación a los mecanismos industriales de la fórmula empírica: (1.68) Donde: –momento resistivo del mecanismo a la velocidad. ;. –momento de fricción de las partes móviles de mecanismo; –momento resistivo del mecanismo a la velocidad nominal. ;. X-exponente que caracteriza la variación del momento resistivo del mecanismo con la variación de la velocidad. La ecuación 1.66 permite clasificar las características mecánicas de los mecanismos industriales en las categorías principales siguientes. 1-Característica mecánica independiente de la velocidad (carga de momento constante) Aquí x = 0 y el momento. resistivo. es independiente de la velocidad. Este tipo de. característica la poseen las grúas, los mecanismos de entrega de los tornos, las bombas reciprocantes para una altura fija de entrega y los trasportadores para una masa fija del 26.
(34) material movido. También pueden ser incluidos aquellos mecanismos cuyo momento resistivo es fundamental de fricción, debido a que, por lo general, en los límites de las velocidades de trabajo el momento de fricción varía poco. 2- Característica lineal creciente (carga de momento proporcional a la velocidad. ). En este caso X=1 y el momento resistivo depende linealmente de la velocidad, el cual crece con el aumento de la misma (se asume para simplificar. ). Esta característica. corresponde con el accionamiento de un generador de corriente directa con excitación independiente y carga resistiva constante. 3- Característica no lineal creciente (carga de momento proporcional a la velocidad al cuadrado. ) parabólica. Esta característica corresponde a X=2 y el momento resistivo depende del cuadrado de la velocidad. A los mecanismos que poseen este tipo de característica se les denomina en ocasiones mecanismos con momentos de ventilación o característica tipo ventilador, debido a que en estos momentos depende del cuadrado de la velocidad. En este grupo también se encuentran los mecanismos de acción centrífuga, tales como bombas y compresores. 4- Característica no lineal descendiente (carga de potencia constante o momento inversamente proporcional a la velocidad. ). En este caso X=-1 y el momento varía inversamente con la velocidad y la potencia solicitada por el mecanismo permanece constante. A este grupo pertenecen algunas máquinas metalúrgicas, tales como fresadoras. También los transportadores elevadores de caña de los centrales azucareros.. 27.
(35) Figura 1.10 Características mecánicas de las máquinas de inducción. 1.7 Consideraciones finales del capítulo. Para la modelación de las máquinas eléctricas rotatorias es necesaria la descripción de sus características físicas constructivas y su principio de operación, así como también tener una idea de su comportamiento en operación De acuerdo con los resultados de la bibliografía consultada en la modelación dinámica de las máquinas eléctricas rotatorias en general y de la máquina de inducción trifásica son empleadas transformaciones de variables,. para obtener sistemas de ecuaciones. diferenciales ordinarias, y dentro de estas transformaciones las más generalizadas son las denominadas de Clarke (estructura de referencia estacionaria) y la de Park (referencia en el rotor). Los diferentes mecanismos accionados por cualquier máquina eléctrica rotatoria que aparecen en la práctica pueden agruparse en cuatro tipos de carga.. 28.
(36) CAPÍTULO 2. Modelos del motor trifásico con cargas mecánicas de diferentes tipos. 2.1 Introducción En este capítulo se describen los modelos implementados en el Software Matlab/Simulink R 2015ª y en especial con las toolbox Simscape y SimpowerSystem para la simulación del motor de inducción trifásico con cargas de los 4 tipos descritos en el capítulo anterior. Se realiza una breve descripción de las características fundamentales de los bloques en el caso del Simscape, por ser estos los más novedosos, a fin de facilitar la comprensión de dichos modelos. Es necesario aclarar que, los modelos de motores empleados ya están disponibles en el Simulink y que como se describe en la ayuda del Matlab/Simulink responden a las ecuaciones de modelos de motores de inducción discutidas en el capítulo primero.. 2.2 Características de los bloques empleados para la modelación en Matlab/Simulink. A partir de la versión Matlab/Simulink R 2013 la toolbox SimPowerSystem aparece dentro de una más amplia que es la denominada Simscape. Esta contiene otros bloques que permiten la modelación sobre bases físicas de sistemas en dominios múltiples, lo cual como se demostrará en este trabajo permite resolver de forma más simple la modelación del caso de la operación de un motor asincrónico con una carga tipo potencia constante, que si se trata de modelar con componentes del SimpowerSystem obligaría a desarrollar un bloque propio para poder modelar y simular la variación del torque y la velocidad para este tipo de carga que como se planteó en el capítulo primero también se denomina de Torque inversamente proporcional a la velocidad. Como se considera que lo más novedoso es el empleo de los elementos disponibles en la librería eléctrica del Simscape, pues ya los bloques del SimPowerSystem son en general conocidos.. 29.
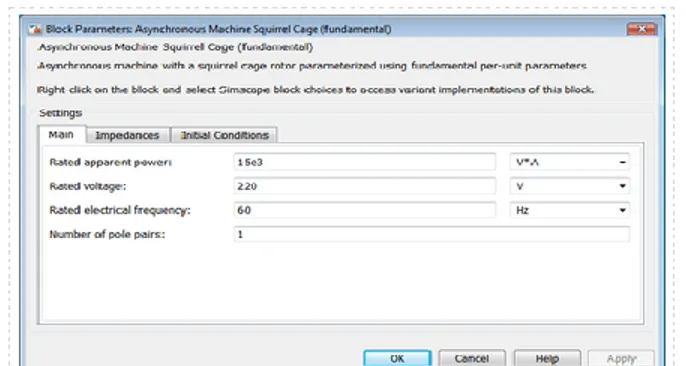
(37) 2.2.1 Bloques eléctricos del toolbox Simscape. Máquina trifásica asincrónica de jaula de ardilla. Figura 2.1 Bloque de Máquina Asincrónica de Jaula de Ardilla (fundamentos). El bloque de Máquina Asincrónica de Jaula de Ardilla modela el rotor de una máquina asincrónica de jaula de ardilla usando parámetros fundamentales Todas las conexiones del estator están accesibles en el bloque. El puerto 1 se conecta a un circuito trifásico. Para conectar el estator en configuración delta, se conecta un bloque de Fase Permutada entre el puerto 1 y 2. Al conectar el estator en configuración estrella se conecta el puerto 2 a un bloque Neutro Aterrizado, o a un bloque Neutro Flotante. Las ecuaciones de la máquina asincrónica están expresadas con respecto al punto de referencia sincrónico, definido por: (2.1) Donde. es el valor del parámetro de frecuencia eléctrica nominal.. La transformación de Park, (la cual se explica en el Capítulo 1) lleva las ecuaciones del estator a un punto de referencia que es estacionario con respecto a la frecuencia eléctrica nominal. Esto puede consultarse en la ayuda del bloque correspondiente En la figura2.2 se muestra la ventana de parámetros de este modelo de máquina Todos los valores de los parámetros que se dan por defecto están basados en una configuración delta del devanado de una máquina de inducción.. 30.
(38) Figura 2.2 Caja de diálogos y parámetros. Sensor de corriente. Figura 2.3 bloque de Sensor de Corriente. El bloque de Sensor de Corriente representa un sensor ideal de corriente trifásica. El bloque mide cada una de las tres corrientes que fluyen entre dos nodos trifásicos y da a la salida un vector de los tres elementos de la señal física Este bloque no tiene parámetros y cuenta con los puertos siguientes ~1-puerto expansible a trifásico ~2-puerto expansible a trifásico 1-puerto de salida del vector de señal física de tres elementos asociado con las corrientes trifásicas. Bloque RLC. Figura 2.5 Bloque RLC. El bloque RLC modela una impedancia trifásica con dos conexiones trifásicas. Cada uno de los tres elementos de las tres impedancias puede incluir cualquier combinación de resistor(R), inductor (L) y capacitor (C), conectadas en serie o en paralelo. Se deben definir los valores para los componentes de R, L y C para especificar los parámetros apropiados del bloque. Para las combinaciones de R, Ly C se debe especificar la 31.
(39) resistencia parásita o valores de conductancia, los cuales pueden ayudar en la convergencia numérica cuando se simulan algunos circuitos topológicos. Este término parásito asegura que el inductor tiene una pequeña resistencia en paralelo y que el capacitor tiene una pequeña resistencia en serie. El bloque tiene dos puertos expansibles trifásicos representando los dos terminales de la línea trifásica .Esto es en la representación en el modelo pueden aparecer las tres conexiones (trifásica) o un solo elemento de conexión (algo más o menos equivalente a un multiconductor, lo cual ayuda a que el modelo no quede tan cargado con conexiones.. Figura 2.6 Caja de diálogos y parámetros del bloque RLC. Fuente de voltaje. Figura 2.7 Bloque Fuente de Voltaje. El bloque Fuente de Voltaje modela una fuente de voltaje trifásico ideal o una fuente de voltaje con armónicos. Cuando se especifica la configuración usando el parámetro Fuente, el bloque modela una fuente de voltaje trifásico que mantiene el voltaje sinusoidal de las magnitudes especificadas a través de sus terminales, independiente de la que corriente que circula por la fuente. El voltaje de salida es definido mediante las siguientes ecuaciones: (2.1) (2.2) (2.3) 32.
(40) (2.4) Donde: –es el voltaje de fase máximo –es el voltaje de fase a fase en rms ,. ,. – son los respectivos voltajes de fases. –es la frecuencia t-es el tiempo –es el ángulo de fase Cuando se especifica la fuente voltaje trifásico con la representación de sus armónicos, el bloque Fuente de Voltaje modela una fuente de voltaje trifásico que mantiene la frecuencia fundamental y armónica de magnitudes especificadas a través de sus terminales, independiente de la corriente que circula por la fuente. El voltaje de salida es definido por las siguientes ecuaciones: (2.5) (2.6) (2.7) (2.8) Donde: –es una fila del vector que contiene que contiene el voltaje máximo y. armónicos. sinusoidales –es una fila del vector de la relación de armónicos. El primer elemento es 1 que representa la fundamental. –es una fila del vector de orden de armónicos. El primer elemento es 1 que representa la fundamental. –es una columna del vector de frecuencia de armónicos. El primer elemento es la frecuencia fundamental. 33.
(41) - es una columna del vector del cambio de fase de armónicos. El primer término es el cambio de fase fundamental –es una columna del vector de desbalance de fase de los armónicos. El primer elemento es La configuración de la fuente esta en estrella y el puerto n facilita una conexión al centro de la estrella. El puerto ~ es un puerto expansible trifásico que representa las tres fases a, b y c. La corriente es positiva si fluye desde el positivo al centro de la estrella, y el voltaje de cada fase es igual a la diferencia entre el terminal del voltaje positivo y el centro de la estrella.. Figura 2.8 Caja de diálogos y parámetros del bloque Fuente de Voltaje. Referencia Eléctrica. Figura 2.9 Bloque Referencia Eléctrica. El bloque Referencia Eléctrica representa una tierra. Todos los bloques que están directamente conectados a tierra deben estar conectados a este bloque. Un modelo con elementos eléctricos debe tener al menos un bloque de este tipo. El mismo no presenta parámetros ni tiene puertos. Convertidores PS -Simulink y Simulink-PS. b). a). Figura 2.10 a) Bloque Convertidor PS –Simulink. b) Bloque convertidor S-PS. 34.
(42) Estos bloques convierten una señal física a una señal de salida del Simulink(PS_S) o una señal de Simulink a una señal de entrada física (S-PS). Se usan para conectar salidas de diagramas de redes físicas a osciloscopios (Scope) u otros bloques del Simulink. En el caso del Ps-S el parámetro Unidad de Señal de Salida permite especificar la unidad deseada para la señal de salida. Esta unidad debe ser proporcional a la señal física procedente del bloque. La señal de salida del Simulink no contiene unidades, pero si se especifica una señal deseada, el bloque aplica un valor igual al factor de conversión antes de aplicar la señal de salida. En el siguiente diagrama se muestra una señal de entrada de un bloque de PS-Simulink con torque en N*m, y si no se especifica la unidad de la señal de salida, el bloque Pantalla (Display) muestra 10. Entonces si se cambia la unidad de la señal de salida (Output signal unit) a N*cm, el valor del torque cambia a 1000 como se muestra en dicho diagrama:. Figura 2.11 Diagrama que muestra el uso del bloque PS-Simulink. 35.
(43) Figura 2.12 Caja de diálogos y parámetros del bloque PS-Simulink. 36.
(44) Bloque de Configuración del Solucionador (Solver Configuration). Figura 2.13 Bloque de Configuración del solucionador (Solver Configuration). De forma similar a lo ya establecido en versiones anteriores de Matlab/Simulink para la toolbox SimPower System que requería de un bloque denominado powergui. Para las corridas de los modelos implementados con bloques de esa toolbox, en Simscape cada señal física representada por un bloque conectado, requiere de parámetros para lograr la simulación. Este bloque especifica los parámetros del modelo que se necesitan antes de comenzar la simulación. Cada diagrama de bloques del Simscape necesita exactamente un bloque de Configuración del Solucionador conectado a este. El bloque consta de un solo puerto. Se puede añadir este bloque dondequiera que exista una red circuital física creando una ramificación en el punto y conectarlo a dicho puerto. En la figura 2.14 se muestra la caja de diálogos de este bloque, que permite entre otras opciones, escoger por ejemplo el método para el solucionador. Figura 2.14 Caja de diálogos y parámetros del bloque Configuración del solucionador. Neutro Aterrado. 37.
(45) En la figura 2.15 se muestra dicho bloque. Este bloque permite conectar las fases de un sistema trifásico a tierra. Como se verá más adelante en los modelos que se toman de la librería del Simscape se necesita para lograr la conexión del bloque de la máquina asincrónica disponible en la librería antes mencionada en conexión Y.. Figura 2.15 Bloque Neutro Aterrado. Referencia Mecánica Rotacional. Figura 2.16 Bloque de Referencia Mecánica Rotacional. Este bloque presenta un punto de referencia o estructura para todos los puertos mecánicos rotacionales. Todos los puertos que están rígidamente conectados a tierra deben estar conectados a este bloque.. Figura 2.16 Caja de diálogos y parámetros del bloque de Referencia Mecánica Rotacional. Potencia Mecánica de la Máquina (pu). 38.
(46) Figura 2.17 Bloque de Potencia Mecánica de la Máquina. Este bloque suministra potencia a, o extrae potencia desde, la máquina que esté conectado. Este contiene una representación de la inercia de la máquina y un punto de referencia mecánico rotacional. En modo generador, la señal de entrada física en pu define la potencia mecánica en pu que entra a la máquina. En modo motor, define la potencia de salida de la máquina. La entrada en pu debe ser siempre positiva. La figura 2.18 muestra una configuración equivalente al bloque de Potencia Mecánica de la Máquina usando componentes mecánicos rotacionales del Simscape.. Figura 2.18 Configuración del bloque de Potencia Mecánica de la Máquina. Para calcular el torque que es aplicado a la inercia, el bloque divide la demanda de potencia por la velocidad presente. Específicamente el parámetro razón de Torque máximo a torque nominal fija el límite de torque máximo. El parámetro Parametrización de inercia específica, precisa directa e indirectamente la inercia, con la constante de inercia de la máquina. Si se especifica la constante de inercia de la máquina, el bloque calcula la inercia como: (2.9) Donde –es la inercia en kg*m2 –es la constante de inercia en W/VA –es la potencia aparente nominal de la máquina conectada en VA –es la frecuencia eléctrica nominal de la máquina conectada en Hz N-es el número de polos pares de la máquina 39.
(47) El amortiguamiento representa una fricción viscosa entre el rotor de la máquina y la referencia mecánica rotacional. Basado en el valor seleccionado en el parámetro Parametrización de amortiguador específico. El coeficiente de amortiguamiento se puede expresar en pu o en unidades SI. Si se especifica este coeficiente en pu, el bloque calcula dicho coeficiente de amortiguamiento en unidades SI, mediante estas ecuaciones: (2.10) (2.11) (2.12) (2.13) Donde: –es la velocidad mecánica base en rad/s –es el torque de amortiguamiento base en Nm –es el coeficiente de amortiguamiento base en Nm/(rad/s) –es el coeficiente de amortiguamiento base en pu - es el coeficiente de amortiguamiento base en unidades SI de Nm/(rad/s) El bloque tiene los siguientes puertos: pu – puerto de señal física de entrada asociada con la potencia mecánica en pu R-puerto mecánico rotacional asociado con el rotor de la máquina C-puerto mecánico rotacional asociado con la carcasa de la máquina. 2.3. Descripción de los Modelos implementados. 2.3.1 Modelo del motor de inducción con carga de potencia constante. Como ya fue descrito en el capítulo primero, este tipo de carga es quizás el más complejo para su simulación, versiones anteriores a Matlab/Simulink 2013 en la toolbox SimPowerSystem ya disponían de modelos de las máquinas de inducción trifásicas, pero no disponían de un modelo físico de las mismas, y menos aún de un modelo de carga de este tipo. Como se ha mostrado en el epígrafe anterior, ya esto ha sido resuelto a partir de la 40.
(48) versión arriba señalada. En la figura 2.19 se muestra el modelo del motor con este tipo de carga implementado en Simulink.. Figura 2.19. Modelo implementado en Simulink de un motor de inducción de 20HP, 2 polos, conexión Y con una carga tipo potencia constante. En la figura 2.20 se muestran algunos resultados de la simulación del modelo, en este caso en particular las formas de onda de la velocidad del rotor, la potencia aparente y el torque todos en pu. Obsérvese en dicha figura como el torque y la velocidad muestran un comportamiento que indica una relación inversa, esto es, a medida que la velocidad aumenta el torque disminuye. Es necesario aclarar que el bloque seleccionado para modelar la máquina asincrónica no brinda la posibilidad de mostrar las potencias activa y reactiva, pero por si por ejemplo el factor de potencia y el ángulo de fase. Esto es una de las diferencias con respecto al bloque que modela la máquina asincrónica en la librería del SimPowerSystem.. 41.
(49) Figura 2.20 Pantalla el osciloscopio mostrando las variaciones de la velocidad del rotor, la potencia aparente y el torque (todos en pu.). 2.3.2 Modelos del motor de inducción trifásico con carga de momento constante En lo referente al tipo de carga de momento constante, como ya se señaló en el capítulo primero, a este tipo de carga pertenecen las grúas, los mecanismos de entrega de los tornos, las bombas reciprocantes para una altura fija de entrega y los trasportadores para una masa fija del material movido. En la figura 2.21 se muestra un modelo implementado con bloques de la librería eléctrica del Simscape y del SimPowerSystem. Nótese la presencia de un bloque del Simscape. Figura 2.21 Modelo de un motor de inducción de 20HP, 460V, 4 polos y 60 Hz con carga de momento constante. En la figura 2.22 se muestran los resultados de las variables corrientes de las fases “a” del rotor y del estator, la velocidad del rotor y el momento eléctrico todas en pu para un tiempo de simulación de 1 segundo. Obsérvense las variaciones de todas las variables, durante el tiempo mostrado, nótese que las corrientes alcanzan lo que se pudiera denominar estado. 42.
(50) estable más rápidamente que las variables velocidad del rotor y torque eléctrico, lo que es consistente con las magnitudes relativas de las constantes de tiempo eléctricas y mecánicas.. Figura 2.22. Pantalla del osciloscopio con varias señales resultados de la simulación. Otro modelo implementado, pero, esta vez solo con componentes de la librería SimPowerSystem se muestra en la figura 2.23. El mismo se implementó con la idea de comparar los resultados y mostrar otras posibilidades con respecto al mostrado en la figura 2.21. Figura 2.23. Otro modelo para la simulación del mismo motor trifásico con carga del tipo de momento constante.. 43.
(51) En la figura 2.24 se muestran los resultados de las variables que se consideró mostrar en el osciloscopio 1 (que fueron las mismas que en el caso del modelo anterior). Obsérvese que ambas figuras muestran un aceptable grado de similitud en cuanto a sus formas, la diferencia reside en que en el caso del primer modelo las variables están en pu y en el segundo en valores reales de las magnitudes mostradas (corrientes en Ampere, velocidad en rad/s y torque en N*m).. Figura 2.24. Pantalla del osciloscopio con varias señales resultados de la simulación. 2.3.3. Modelo del motor con carga del tipo momento proporcional a la velocidad. En la figura 2.25 se muestra el modelo implementado para este caso. Aquí es preciso señalar que el momento que se le introducirá al motor se extrae de la función que se obtiene de realimentar la velocidad del rotor del motor multiplicada por un coeficiente. Como el torque T es proporcional a la velocidad, entonces: (2.1) El torque nominal se calcula según: Nm Por consiguiente, la constante k se calcula como: Nm Entonces en el en el menú de parámetros del bloque Fcn se introduce la expresión del torque (0.4203*u). 44.
(52) Figura 2.25 Modelo de un motor de inducción con carga de momento proporcional a la velocidad.. En la figura 2.26 se muestran los resultados de las mismas variables (no son las únicas que pudieran analizarse) que en el caso del modelo del epígrafe anterior en el osciloscopio 1. Obsérvese que, aunque las formas de variación de las figuras son parecidas, ahora las variaciones mayores se producen en un tiempo menor, estabilizándose las señales más rápido, lo que pudiera interpretarse como que el motor con este tipo de carga alcanza el estado estable más rápidamente.. 45.
(53) Figura 2.26 Pantalla del osciloscopio con varias señales resultados de la simulación para el tipo de carga con momento proporcional a la velocidad. 2.3.4 Modelo del motor con carga del tipo momento proporcional a la velocidad al cuadrado. Al igual que en los casos de los epígrafes 2.3.2 al 2.3.3 se escoge una Máquina Asincrónica (Asynchronous Machine SI Units) con los mismos parámetros fijos de 20Hp, 460V y 60Hz. Ahora, a diferencia del otro motor, para implementar la característica de carga tipo ventilador, se asume: X = 2 Características mecánicas no lineal creciente, como se analizó en el capítulo anterior. Entonces partiendo de la ecuación (1.68) que se repite aquí por comodidad, el momento sería de la siguiente forma:. En este caso el momento resistivo varía cuadráticamente con la velocidad, en ocasiones a esta característica se le denomina tipo bomba o ventilador por ser típica a estos mecanismos industriales. El torque T es entonces proporcional al cuadrado de la velocidad .. T k 2 El torque nominal es: 46.
Figure
![Figura 1.3 Clasificación de las MER según [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/7399591.468379/14.918.134.618.173.728/figura-clasificación-de-las-mer-según.webp)

+7


![Figura 1.9 Relación entre los ejes de dq y abc (tomado de [10])](https://thumb-us.123doks.com/thumbv2/123dok_es/7399591.468379/30.918.126.819.483.972/figura-relación-ejes-dq-abc-tomado.webp)

Documento similar
· Emisión de informe sobre la adecuación entre las competencias y conocimientos adquiridos de acuerdo con el plan de estu- dios del título de origen, o la experiencia laboral
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Nuestro estudio se basa en un motor de inducción de rotor devanado que nos servirá de ejemplo de como realizar la caracterización de uno de los motores más utilizados en
El contar con el financiamiento institucional a través de las cátedras ha significado para los grupos de profesores, el poder centrarse en estudios sobre áreas de interés
En estos últimos años, he tenido el privilegio, durante varias prolongadas visitas al extranjero, de hacer investigaciones sobre el teatro, y muchas veces he tenido la ocasión
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
