Métodos de Detección para Redes Radio Cognitivas
55
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA “Métodos de Detección para Redes Radio Cognitivas”. Autor: Cesar Guzmán Cruz E-mail: [email protected]. Tutor: Ing. Raikel Bordón López Prof. Dpto. de Telecomunicaciones y Electrónica Facultad de Ingeniería Eléctrica. UCLV. E-mail: [email protected]. Santa Clara 2014 "Año 56 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “La grandeza de un hombre reside en saber reconocer su propia pequeñez.” Blaise Pascal.
(5) ii. DEDICATORIA. A mi sol Ana Ivia Cruz Díaz, mi madre a quién le debo todo y es la dueña de mis triunfos A la memoria de mis abuelas Ana, Coralia, Walkiria, Manuela López (Mangola) y mi abuelo Fernando, de seguro estarían orgullosos.
(6) iii. AGRADECIMIENTOS. A mi tutor Raikel y su familia, sin su ayuda no hubiera sido posible este trabajo A mis abuelos Estrella, Neyda y Pablo por ser mi guía en los momentos difíciles A mi cenicienta moderna Arliety por compartir a mi lado las derrotas y los triunfos A María y Robe por ser como unos padres para mí A mi hermano José Carlos Cuadras Cruz que me inspiró a lograr mi meta trazada A mi padre Mario Cesar Guzmán González por su apoyo cuando lo necesite A mis tíos Fernando, Enmita, Rita, Fichi, Carlos, Tito y mis primos Fernando, Cesar Rubén, Carlos David, Carlos Javier, Yanier y Fide por ser el complemento familiar para mis estudios en la vida A mi amigo Alberto por darme aliento desde que empecé mi carrera cuando muchos pensaron que los cálculos eran imposibles A mis compañeros de estudios de la carrera de telecomunicaciones, a los que culminaron, a los que aún les faltan y a los que ya no están, juntos pasamos años muy lindos y difíciles, llenos de obstáculos, mi respeto para ellos, de todos aprendí mucho A los excelentes profesores que tuve en toda la carrera, el rigor me hizo más fuerte A Yoel por ayudarme desde tan lejos cuando todo se tornaba oscuro.
(7) iv. TAREA TÉCNICA. 1. Realizar un estudio sobre la radio cognitiva como tecnología emergente para el uso eficiente del espectro radioeléctrico. 2. Caracterizar los principales métodos de detección del espectro utilizados en la radio cognitiva. 3. Implementar algoritmos de detección del espectro utilizando una herramienta de software apropiada. 4. Evaluar mediante simulación la efectividad de las técnicas de detección del espectro implementadas.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La radio cognitiva es una tecnología emergente de las comunicaciones inalámbricas que permite un uso más eficiente de los recursos espectrales mediante técnicas de acceso dinámico al espectro. Como parte de las técnicas de acceso dinámico al espectro, la detección del espectro es una de las funciones más importantes para una implementación eficiente de los sistemas radio cognitivos. En este trabajo se realiza un estudio de los principales métodos de detección utilizados en la radio cognitiva y se discuten sus ventajas y desventajas. Como parte del estudio realizado, se presentan las herramientas teóricas para el análisis y evaluación del desempeño del detector de energía y se describe la implementación de una arquitectura de detección cooperativa centralizada basada en diferentes métodos de fusión de decisiones. El desempeño del detector de energía y de los métodos de fusión de decisiones se evalúa analíticamente y mediante simulación para diferentes escenarios de operación. Los resultados obtenidos muestran que es posible incrementar el desempeño de los métodos de detección mediante el empleo de técnicas cooperativas..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1. 1.1. Radio Cognitiva ....................................................................................................... 3. 1.1.1 1.2. Ciclo Cognitivo ................................................................................................. 4. Modelos de Acceso Dinámico al Espectro............................................................... 6. 1.2.1 1.3. REVISIÓN BIBLIOGRÁFICA ................................................................. 3. Detección del espectro ...................................................................................... 8. Métodos de detección del espectro .......................................................................... 9. 1.3.1. Métodos de Detección Local ............................................................................ 9. 1.3.2. Detección Cooperativa .................................................................................... 11. 1.4. Avances en la Radio Cognitiva .............................................................................. 13. 1.5. Conclusiones parciales del capítulo ....................................................................... 15. CAPÍTULO 2. 2.1. IMPLEMENTACIÓN DE DETECTORES ............................................ 17. Evaluación del desempeño de los métodos de detección ....................................... 17.
(10) vii 2.1.1 2.2. Desempeño del detector de energía ................................................................ 18. Detección cooperativa ............................................................................................ 20. 2.2.1. Fusión de decisiones ....................................................................................... 22. 2.2.2. Fusión de datos ............................................................................................... 23. 2.3. Implementación de los métodos de detección ........................................................ 23. 2.3.1. Detector de Energía ........................................................................................ 24. 2.3.2. Detección cooperativa..................................................................................... 25. 2.4. Conclusiones parciales del capítulo ....................................................................... 26. CAPÍTULO 3.. RESULTADOS Y DISCUSIÓN ............................................................. 27. 3.1. Detector de Energía ................................................................................................ 27. 3.2. Detección Cooperativa ........................................................................................... 30. 3.3. Conclusiones del capitulo ...................................................................................... 35. CONCLUSIONES Y RECOMENDACIONES ................................................................... 37 Conclusiones ..................................................................................................................... 37 Recomendaciones ............................................................................................................. 38 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 39 ANEXOS .............................................................................................................................. 41 Anexo I Anexo II. Programación del detector de energía ............................................................. 41 Código de la Detección Cooperativa........................................................... 43.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. En la actualidad la explotación del espectro radioeléctrico se realiza de forma ineficiente debido a las políticas de asignación fija de las bandas de frecuencias [1]. Estudios recientes han demostrado que algunas bandas de frecuencias se encuentran subutilizadas la mayor parte del tiempo [2]. Por otro lado, el crecimiento acelerado de los servicios de comunicaciones inalámbricas en la última década ha enmarcado la necesidad de realizar estudios para una utilización más eficiente del espectro. Una de las tecnologías propuestas para hacer frente al problema de la escasez espectral es la radio cognitiva. La radio cognitiva permite que determinados usuarios sin licencia para el uso del espectro, denominados usuarios secundarios, accedan de forma oportunista a las bandas de frecuencias subutilizadas por los usuarios primarios, que son los que tienen mayor prioridad para el acceso al espectro [3]. Durante el acceso oportunista al espectro, los usuarios secundarios no deben interferir con las comunicaciones de los usuarios primarios. La detección del espectro es una de las características más importantes de la radio cognitiva que la distinguen de la radio convencional. Como parte del ciclo cognitivo, la detección del espectro es una de las funciones más relevantes para garantizar la protección de los usuarios primarios durante el acceso de los usuarios secundarios al espectro. Dentro de las principales dificultades actuales de la radio cognitiva se encuentra el diseño de algoritmos de detección eficientes. Esto nos lleva a la formulación del siguiente problema científico: ¿Cómo aplicar eficientemente la detección del espectro para garantizar la protección de los usuarios primarios en redes radio cognitivas? Todo lo anterior nos lleva al objetivo general: Implementar métodos de detección del espectro para sistemas de radio cognitivo. Para dar cumplimiento al objetivo general, se plantean como objetivos específicos de esta investigación:.
(12) INTRODUCCIÓN. . 2. Caracterizar los principales métodos de detección del espectro utilizados en la radio cognitiva.. . Implementar algoritmos de detección utilizando una herramienta de software apropiada.. . Evaluar y comparar el desempeño de los diferentes métodos de detección bajo diferentes condiciones de operación.. Para cumplir con los objetivos propuestos se hace necesario responder las siguientes interrogantes científicas: ¿Cuáles son las características fundamentales de la radio cognitiva? ¿Cuáles son los métodos de detección más utilizados en la radio cognitiva? ¿Qué ventajas y desventajas tienen cada uno de ellos? ¿Cómo evaluar la eficacia de los algoritmos de detección del espectro? ¿Qué condiciones de operación establecer para realizar la evaluación? Los resultados teóricos que se deriven del presente estudio serán de utilidad en la comprensión y evaluación de la radio cognitiva como tecnología emergente. Por otro lado, la modelación y los estudios mediante simulación de los diferentes métodos de detección del espectro permitirán evaluar el alcance y la utilidad de su implementación práctica. La culminación de este trabajo estará a disposición de los especialistas, estudiantes y profesores de la Facultad de Ingeniería Eléctrica de la UCLV como material de consulta. Organización del Informe El informe de la investigación se estructurará en introducción, capitulario, conclusiones, referencias bibliográficas, bibliografía y anexos. En el capítulo 1 se exponen las características generales de la tecnología radio cognitiva y se abordan conceptos básicos relacionados con los métodos de detección del espectro. En el capítulo 2 se presentan las herramientas teóricas para el análisis y evaluación del desempeño del detector de energía. Se describen además los métodos de fusión de decisiones empleados en la detección cooperativa y se presenta el modelo del sistema utilizado en la evaluación de estos métodos. En el capítulo 3 se presentan los resultados de la evaluación del desempeño del detector de energía y de los métodos de fusión de decisiones para diferentes escenarios de operación..
(13) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 3. CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. En este capítulo se presentan los resultados del estudio del estado del arte y aspectos teóricos relacionados con los temas que son abordados. En el epígrafe 1.1 se exponen las características generales de la radio cognitiva como tecnología emergente. En el epígrafe 1.2 se abordan los modelos de acceso dinámico al espectro. En el epígrafe 1.3 se presentan conceptos básicos relacionados con métodos de detección del espectro. En el epígrafe 1.4 se resumen avances significativos en la radio cognitiva. Por último, en el epígrafe 1.5 se abordan las principales conclusiones que resultan de este capítulo. 1.1. Radio Cognitiva. La idea de la radio cognitiva como dispositivo de radiocomunicaciones capaz reconocer y asistir a los usuarios en sus necesidades y adaptarse a las condiciones del entorno de forma autónoma, fue presentada por primera vez en [4]. La radio cognitiva es un modelo de la comunicación inalámbrica en la cual tanto las redes como los nodos inalámbricos cambian los parámetros particulares de transmisión o de recepción para ejecutar su función de manera eficaz sin interferir con otros usuarios. Esta modificación de parámetros se realiza en base a la observación de varios factores del entorno y del estado interno del sistema, tales como el espectro de radiofrecuencia, el comportamiento de los usuarios y el estado de la red [5]. Para algunos autores [6], la tecnología radio cognitiva es una evolución de la Radio Definida por Software (SDR: Software Defined Radio). La SDR provee a la radio cognitiva de una plataforma de hardware reconfigurable que resulta esencial para las características de reconfigurabilidad de estos sistemas. En la figura 1.1 se muestra la estructura en bloques de la radio definida por software en sus tres etapas fundamentales: la entrada y salida de.
(14) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 4. radio frecuencias y el procesado de los datos como parte de las secciones de radio frecuencias de RF y el flujo de información en una etapa intermedia. La sección RF es la responsable de adaptar la señal. En recepción la señal de radio frecuencia es transformada a una señal de frecuencia intermedia. En trasmisión, la señal analógica es transformada y amplificada. En la sección IF, los bloques ADC transforman la señal analógica en digital y los bloques DAC transforman la señal digital en analógica. En recepción, los bloques DDC realizan una demodulación digital, en transmisión, los bloques DUC realizan una modulación digital. Estos dos últimos bloques son programables. La sección de banda base realiza operaciones en banda base e implementa, mediante software, el protocolo de la capa de enlace.. Figura 1.1 Estructura de un Radio Definido por Software (SDR).. 1.1.1 Ciclo Cognitivo El ciclo cognitivo es una representación de alto nivel de la arquitectura sistema Radio Cognitivo [7]. El modelo consta de cuatro fases fundamentales o etapas del proceso cognitivo: Análisis del Espectro, Decisión del Espectro, Compartición del Espectro y Movilidad Espectral. A continuación se describen brevemente las funciones de cada una de estas fases dentro del ciclo cognitivo: . Análisis del Espectro: El objetivo de esta fase es identificar los llamados agujeros espectrales o bandas de frecuencias a las que pueden acceder los SUs sin interferir con las comunicaciones primarias, como se muestra en la figura 1.2..
(15) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. Figura 1.2 Agujeros espectrales, bandas de frecuencias en función del tiempo.. . Decisión del Espectro: Una vez identificados los agujeros espectrales se seleccionan las bandas de frecuencia de operación en correspondencia con los requerimientos de calidad de servicio de los SUs.. . Compartición del Espectro: En esta etapa del ciclo cognitivo desempeñan un papel fundamental los protocolos de control de acceso al medio para evitar la interferencia mutua entre múltiples usuarios secundarios durante el acceso al espectro.. . Movilidad espectral: Los mecanismos de movilidad espectral o handoff permiten que la calidad de servicio percibida por los SUs no se vea afectada por los cambios en la frecuencia de operación debido a los patrones actividad de los PUs.. Las etapas esenciales de la radio cognitiva resultan un proceso complejo, en la figura 1.3 se muestra el ciclo de estos procesos.. Figura 1.3 Etapas esenciales del ciclo cognitivo..
(16) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.2. 6. Modelos de Acceso Dinámico al Espectro. Para el acceso dinámico al espectro en las bandas de frecuencia bajo licencia es necesario realizar una distinción entre dos grupos de usuarios: usuarios de mayor prioridad o usuarios primarios (PUs: Primary Users) y usuarios de menor prioridad o usuarios secundarios (SUs: Secondary Users). En la literatura científica se distinguen tres modelos de acceso dinámico al espectro: Interweave, Underlay y Overlay [8]. Estos tres paradigmas tienen el objetivo común de utilizar de forma oportunista los recursos espectrales disponibles sin interferir las comunicaciones de los PUs. En el modelo interweave los SUs acceden temporalmente a determinadas bandas de frecuencias subutilizadas por los PUs. En el modelo underlay los SUs pueden operan de forma concurrente con los PUs mientras se garantice la no interferencia de las comunicaciones primarias. En el esquema Overlay los SUs utilizan una parte de sus recursos (potencia de transmisión, ancho de banda y tiempo) para asistir las comunicaciones de los PUs. En el modelo Underlay se imponen severas restricciones en la potencia de transmisión de los SUs de modo que al operar de forma concurrente con los PUs el nivel de interferencia percibido por los receptores primarios se encuentre por debajo de un umbral preestablecido. El paradigma Underlay utiliza técnicas que permiten la comunicación de los SU asumiendo el conocimiento del nivel de interferencia causado por el transmisor SU a los receptores primarios. La FCC propuso la Temperatura de interferencia como un indicador de la interferencia causada por los transmisores secundarios a los receptores primarios [9]. Para hacer una evaluación de esta temperatura de interferencia, la interferencia creada por un transmisor secundario sobre un receptor PU se puede aproximar por reciprocidad. Es decir, la interferencia creada por los SUs sobre los PUs es aproximadamente igual a la creada por los PUs sobre los SUs. Entre los tópicos de investigación abiertos en esta área se encuentran el estudio de cómo esta temperatura de interferencia puede ser evaluada por el transmisor primario y si la indicación que proporciona es suficiente para garantizar la protección del PU frente a la interferencia causada por el SU. El paradigma Interwave se basa en la idea de la comunicación oportunista y fue la motivación original la radio cognitiva [8]. La idea surgió al observar medidas espectrales.
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. realizadas por la FCC y las industrias que mostraron que, en determinados instantes y en determinadas posiciones, segmentos de espectro no están adecuadamente aprovechados. Los agujeros espectrales cambian con el tiempo y la posición geográfica y pueden ser explotados por los SUs para sus comunicaciones. Con este propósito, el espectro radioeléctrico se monitorea periódicamente para detectar de manera inteligente si son detectadas la ocupación de las diferentes bandas de frecuencia y que de manera oportunista son utilizadas para transmitir creando la mínima interferencia sobre los usuarios primarios activos. Este modelo de acceso al espectro requiere información de la actividad en el espectro de los PUs. En el modelo Overlay, los SUs deben tener conocimiento de los códigos o del mensaje de los PUs [3]. La información de los códigos se puede obtener, si los PUs siguen un estándar uniforme de comunicación basado en códigos públicos. Otra alternativa es que los PUs envíen los códigos a los usuarios de la misma banda de forma periódica. En cuanto al mensaje, en el modelo Overlay es necesario que los SUs tengan conocimiento del mensaje del PU antes de su transmisión. Esta hipótesis puede resultar válida en un escenario donde los SUs ofrecen cooperación a los PUs a través de la retransmisión de sus mensajes a cambio de poder utilizar sus bandas de frecuencias. El conocimiento de los mensajes y códigos utilizados por los PUs pueden ser explotados de diferentes formas con la finalidad de mitigar o reducir la interferencia de los SUs sobre los PUs. Por una parte, esta información puede ser utilizada para cancelar totalmente la interferencia. Si el SU conoce el código utilizado por el PU para transmitir, el SU puede utilizar un código ortogonal al del PU, cancelando así la interferencia entre ambas comunicaciones. Los SUs pueden utilizar el conocimiento de los mensajes para dedicar parte de los recursos de radio que están utilizando para retransmitir la señal de los PUs. La parte restante se dedicaría a las transmisiones propias de los SUs. Hay que tener en cuenta que el paradigma Overlay puede ser aplicado tanto en bandas bajo licencia como en bandas de libre acceso. En las bandas bajo licencia, los SUs deben compartir el espectro con los PUs sin interferir en sus comunicaciones. En las bandas de acceso libre, los SUs aumentan la eficiencia espectral y explotan el conocimiento de los mensajes y códigos con tal de reducir la interferencia. Los tres modelos de acceso dinámico al espectro analizados anteriormente están caracterizados por el mismo objetivo final, que es utilizar el espectro radioeléctrico de.
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. manera más eficiente a partir de la información del entorno obtenida mediante la detección del espectro. Los paradigmas se diferencian en el tipo de información que necesitan para su funcionamiento, así como en los protocolos de comunicación que emplean a los SUs. 1.2.1 Detección del espectro Como parte del ciclo cognitivo, la detección del espectro (Spectrum Sensing) es una de las funciones más relevantes para garantizar la protección de los usuarios primarios durante el acceso de los usuarios secundarios al espectro [1]. El objetivo de la detección del espectro es obtener información sobre la actividad de los usuarios primarios en determinadas bandas de frecuencias, como se muestra en la figura 1.4. Esta información puede incluir los tipos de señales que están utilizando el espectro radioeléctrico y características específicas que presentan como son el tipo de modulación, ancho de banda, frecuencia portadora, forma de onda entre otras.. Figura 1.4 Detección del espectro.. La implementación práctica de los métodos de detección se ve afectada por varios factores. En primer lugar, los requerimientos computacionales de algunas de las funciones más complejas requeridas en detección del espectro son elevados. Igualmente, existe la posibilidad de no detectar la transmisión de un usuario primario en curso debido a las interferencias causadas por otros usuarios secundarios, las limitaciones en la duración del intervalo de detección o una distribución en frecuencias extensas de las señales del usuario primario. Entre los aspectos que pueden tomarse en consideración para minimizar la interferencia de los SUs sobre los PUs se encuentran los siguientes: técnicas de modulación adaptativa, control de la potencia de transmisión, incremento de la selectividad en.
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. frecuencia, diseño conjunto de la codificación/compresión de fuente y codificación de canal [10]. 1.3. Métodos de detección del espectro. Las técnicas de detección del espectro pueden clasificarse en locales o distribuidas [11]. Dentro de los métodos de detección local se encuentran el detector de energía, el detector de filtro adaptado y el detector cicloestacionario. Los métodos de detección distribuidos pueden implementarse mediante estrategias cooperativas o no cooperativas. 1.3.1 Métodos de Detección Local Detector de energía: El detector de energía es el modo más común de detección del espectro debido a su bajo coste computacional y la baja complejidad de implementación [12]. El receptor no necesita ningún conocimiento de la señal de los usuarios primarios presentes, la señal es detectada y comparada a la salida del detector de energía con un umbral dependiendo del ruido en el canal. Los detectores de energía no trabajan eficientemente para detectar señales de espectro extendido [13]. Entre las dificultades asociadas a la implementación práctica de este método de detección se encuentran la selección del valor óptimo del umbral de detección, la incapacidad de distinguir entre interferencia y ruido y el desempeño desfavorable ante valores bajos de relación señal a ruido. Detección de filtro adaptado: Cuándo los usuarios secundarios tienen información de las características de las señales transmitidas por los PUs, la detección de filtro adaptado es el método óptimo [14]. Tales características incluyen la frecuencia central, tipo de modulación, ancho de banda, forma del pulso y formato de trama. La mayoría de los sistemas de comunicaciones incluyen señales pilotos, preámbulos o secuencias de sincronización utilizadas para asistir el control, ecualización, sincronización, mantener la continuidad o propósitos de referencia. Si los SUs tienen a su disposición información parcial de las señales de los PUs, el uso del filtro adaptado aún es posible para la detección del espectro. La principal ventaja del método es el reducido número de muestras y en consecuencia el corto tiempo requerido para obtener una cierta probabilidad de falsa alarma o de detección incorrecta en comparación con otros métodos. Los análisis teóricos muestran.
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. en regímenes de valores reducidos de relación señal a ruido SNR (Signal-to-Noise Ratio) el número de muestras requeridas para alcanzar determinada probabilidad de detección y falsa alarma es función lineal de 1/SNR [1]. Su desventaja fundamental es la elevada complejidad de implementación y el incremento en el consumo de potencia cuando se requiere detectar señales de varios tipos Detector cicloestacionario: Este método explota las periodicidades implícitas de las señales moduladas, tales como portadoras sinusoidales, trenes de pulsos o prefijos cíclicos para la detección del espectro [12].. Una señal es cicloestacionaria cuando alguno de sus. parámetros estadísticos como el valor medio o la autocorrelación es una función periódica del tiempo. Las señales cicloestacionarias exhiben una correlación entre las componentes espectrales que se encuentran muy separadas, debido a la redundancia espectral causada por la periodicidad. La función de densidad espectral cíclica de la señal recibida se define como: ∞. 𝑆(𝑓, 𝛼) = ∑ 𝑅𝑦𝛼 (𝜏)𝑒 −𝑗2𝜋𝑓. (1.1). 𝑡=−∞. Donde 𝑅𝑦𝛼 (𝜏) = 𝐸[𝑦(𝑡) ∗ 𝑦(𝑡 − 𝜏)𝑒 −𝑗2𝜋𝛼𝑡 ] es la función de autocorrelación cíclica y 𝛼 es la frecuencia cíclica. En la expresión anterior, los operadores 𝐸[∙] y ∙∗ denotan el valor esperado y la operación de conjugación, respectivamente. La función de densidad espectral cíclica es una función bidimensional en términos de la frecuencia y la frecuencia cíclica, donde la densidad espectral de potencia corresponde al caso especial de 𝛼 = 0. Esta función exhibe picos donde la frecuencia cíclica es igual a la frecuencia fundamental de la señal a detectar. Estas frecuencias cíclicas son conocidas, ya que los organismos reguladores tienen conocimiento de las mismas y sus parámetros principales, que son asignados en estándares inalámbricos. Este método de detección puede diferenciar entre ruido, señal de usuario secundario y señal del usuario primario, ya que la señal de ruido es estacionaria pero no presenta correlación, mientras que las señales moduladas son cicloestacionarias con correlación espectral debido a la periodicidad de la señal..
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. 1.3.2 Detección Cooperativa Las técnicas de detección local no siempre garantizan un desempeño satisfactorio debido al ruido, la interferencia, el ensombrecimiento y el desvanecimiento presentes en el canal inalámbrico, como se muestra en la figura 1.8. La colaboración entre varios usuarios secundarios permite explotar la diversidad espacial en la detección del espectro y como resultado las probabilidades de falsa alarma y detección incorrecta disminuyen significativamente [11]. La cooperación puede ser implementada de dos modos diferentes: centralizada o distribuida. En la arquitectura centralizada de detección cooperativa la información de detección del espectro de múltiples usuarios secundarios es enviada a una unidad central que se encarga de identificar bandas de frecuencia disponibles a partir del análisis de las observaciones individuales de los nodos detectores [13]. La unidad central puede controlar directamente el tráfico de la red o difundir la información con los canales disponibles a todos los dispositivos de la red secundaria. Esta arquitectura tiene como desventaja fundamental que los requerimientos de ancho de banda para enviar la información de detección a la unidad central son mayores en la medida que el número de SUs crece.. Figura 1.8 Modelo Detección Cooperativa del Espectro.. Por otro lado, en una arquitectura distribuida de detección cooperativa la información de detección local del espectro se comparte entre los nodos secundarios, pero cada nodo toma las decisiones sobre que porciones del espectro utilizar de forma independiente [11]. Con respecto a la arquitectura centralizada, la arquitectura distribuida tiene como ventaja que no requiere de infraestructura..
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. Los métodos de detección cooperativa se clasifican según la forma en que las observaciones individuales son reportadas [11]. Cuando cada nodo envía los datos observados o procesados a un nodo central, el esquema de detección se denomina fusión de datos. Alternativamente, si los nodos detectores envían las decisiones individuales sobre el estado de uso del espectro, se denomina fusión de decisiones. En los métodos de fusión de datos, las observaciones pueden ser reportadas de forma comprimida o procesada con el objetivo de conservar ancho de banda, en lugar de enviar directamente las muestras de la señal recibida. Si los nodos individuales realizan la detección del espectro utilizando detectores de energía, la energía de la señal observada por cada nodo, 𝑀𝑖 , es enviada a una unidad central, donde la métrica de detección 𝑀𝐿𝐶 es obtenida como la combinación lineal de las observaciones individuales, esto es 𝑁. 𝑀𝐿𝐶 = ∑. 𝑁. 𝑔𝑖 𝑀𝑖 ,. 𝑖=1. 𝑔𝑖 ≥ 0,. ∑. 𝑔𝑖 = 1. (1.2). 𝑖=1. donde los coeficientes lineales 𝑔𝑖 pueden ser obtenidos como 𝑔𝑖 = 1/𝑁, 𝑖 = 1, 2, … , 𝑁 cuando no existe información de la potencia de la señal recibida por cada nodo. Los valores óptimos de los coeficientes de peso pueden determinarse usando el criterio de NeymanPearson, el cual maximiza la probabilidad de detección para una probabilidad de falsa alarma dada. Sin embargo, para la aplicación de este método se requiere información de la señal a detectar. En los métodos de detección cooperativa que utilizan la fusión de decisiones, la información proveniente de varios dispositivos detectores puede ser combinada mediante operaciones AND, OR, ó K-out-of-N. En la operación AND la decisión final es ℋ1 si todas las observaciones son ℋ1 . En la operación OR, la decisión final es ℋ1 si al menos una de las observaciones es ℋ1 . En la operación K-out-of-N la decisión final es ℋ1 cuando al menos K de las N observaciones son ℋ1 . El valor de K es un parámetro de diseño que puede optimizarse a partir de varios criterios..
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.4. 13. Avances en la Radio Cognitiva. Durante los últimos años, y debido a la flexibilidad que aportan los sistemas basados en radio cognitiva, han surgido nuevos escenarios y casos de uso donde aprovechar las ventajas que presentan este tipo de sistemas, abogando por el uso de una planificación dinámica como respuesta a la ineficiencia de los tradicionales modelos estáticos. Prueba de ello son los numerosos estudios que proponen aplicar el paradigma de la radio cognitiva a las redes eléctricas inteligentes. Los avances, tanto en el diseño y optimización de los medidores inteligentes como en las comunicaciones digitales, auguran un futuro prometedor a dichas redes, hasta convertirse en una sólida alternativa para garantizar la eficiencia en la generación, distribución y uso de la energía eléctrica vinculando los usuarios finales y las plantas eléctricas. En dicho sistema, las comunicaciones constituyen uno de los ejes centrales para buen funcionamiento del mismo y, debido a los bajos costes de instalación y a su gran flexibilidad, las comunicaciones inalámbricas son la opción ideal. Sin embargo, el auge de este tipo de redes lleva inherente un crecimiento en el volumen de unidades medidores inteligentes necesarias, redundando en un aumento en el tráfico de datos y, por consiguiente, en el ancho de banda necesario para soportar este tipo de comunicaciones, lo que contrasta con un espectro radioeléctrico cada vez más escaso. De la mano de un enfoque cognitivo y mediante técnicas de monitorización espectral, el medidor inteligente podría decidir transmitir sus datos en uno u otro canal para mejorar la calidad de las comunicaciones sin colapsar la red. Otro escenario factible son las Redes Vehiculares, donde la radio cognitiva podría ser útil con dos propósitos fundamentales: por un lado, para satisfacer la demanda de capacidad de los Sistemas Inteligentes de Transporte, o ITS (que incluyen tanto las comunicaciones entre vehículos como aquellas entre infraestructura y vehículo) y por otro, como ayuda a que dichas aplicaciones liberen espectro cuando estén inactivas y no causen congestión. También este tipo de sistemas se podrían aprovechar de bandas de frecuencia más bajas que posean agujeros espectrales, con su consiguiente mejora en las condiciones de propagación..
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. Servicios de emergencia médica Los servicios de emergencia médica se proporcionan al público, principalmente en dos fases. La primera de ellas es mediante un móvil médico, por ejemplo, una ambulancia. La segunda es un ambiente controlado con mayor asistencia médica que un hospital metropolitano. Los nuevos avances médicos tienen la capacidad de ofrecer mejores servicios de asistencia médica. Los sistemas médicos personales, pueden ayudar a transferir la información del paciente mediante un ambiente de control. La transmisión de información requiere un ancho de banda suficiente, porque puede incluir video y sonido. De este modo, se podrá transmitir la información de una manera más rápida y confiable, ya que así se puede ofrecer un mejor servicio al paciente, por ejemplo, si un paciente necesita un medicamento controlado, se puede tener el medicamento antes de que el paciente llegue allí. Si se requiere una intervención urgente de cualquier tipo, el personal móvil podrá realizarla con la ayuda de especialistas que se encuentran en el ambiente controlado. También es importante que el funcionamiento de los equipos médicos no se afecte o dañe durante la transferencia de información de los dispositivos inalámbricos. La radio cognitiva puede ayudar de manera eficiente a los servicios médicos de emergencia, facilitando las tareas del personal médico y salvando vidas humanas. Ingeniería biomédica La Ingeniería biomédica puede implicar la inserción o fijación de dispositivos electrónicos en el cuerpo humano, para controlar distintas funciones del cuerpo y poder transmitir la información para dar seguimiento al paciente cuando sea necesario. La radio cognitiva puede permitir la detección inteligente de tejidos o de células anormales en la sangre dentro de un cuerpo humano y notificar al médico. Esto puede jugar un papel crucial para salvar vidas humanas. Asistencia a las personas invidentes La radio Cognitiva puede convertirse en los ojos de una persona invidente. Comúnmente un invidente se auxilia de los perros o bastones. La radio cognitiva puede sustituir estas guías con información, indicando al usuario, que ruta es la adecuada, el momento en que deben cruzar la calle, indicarle que trayecto es el adecuado para que pueda aprovechar en hacer sus compras también, etc. Dependiendo de las actividades diarias de la persona invidente, la.
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 15. radio cognitiva puede adaptarse para personalizarse a las necesidades de cada usuario invidente. Sector Militar Entre todas las aplicaciones de la radio cognitiva, la aplicación militar es quizás una de las más importantes, en donde los diferentes aspectos de la radio cognitiva se han desarrollado desde hace ya un tiempo. El Radio Definido por Software “SPEAKEASY” es un conjunto de sistemas de radio táctica (JTRS) y son algunas de las más importantes tecnologías en el campo militar, que utilizan los conceptos de la radio cognitiva. En la forma más simple, SDR puede definirse como un radio que es controlado y ejecutado por software. Las ventajas de SDR han sido reconocidas por los militares para resolver sus deficiencias de comunicación en tiempo de guerra. Algunas de estas deficiencias se abordaron en el proyecto SPEAKEASY, el cual es una aplicación avanzada de SDR. Los esfuerzos en SPEAKEASY condujeron a la elaboración del proyecto JTRS. La situación actual de los militares impone diferentes sistemas de radio que se mantienen y operan manualmente. El proyecto JTRS puede reducir el total de equipos de comunicación trayendo consigo la eliminación de múltiples sistemas. Algunas de las características significativas de JTRS incluyen una reducción de los costos de mantenimiento y la complejidad, eliminando el exceso de equipos se puede lograr que las comunicaciones militares sean menos vulnerables a la intercepción de enemigos, ya que esto provoca una mejora en el uso del espectro, así como la facilidad de aplicación debido a su compatibilidad con los sistemas actuales. 1.5. Conclusiones parciales del capítulo. El capítulo crea las bases de trabajo sugerido para el estudio de las redes de radio cognitiva, establece la funcionalidad que deben ofrecer estos sistemas y propone tres aspectos fundamentales de implementación relacionados con la prevención de interferencia, el sentido permanente de la calidad de servicio y la conexión transparente del usuario no licenciado o usuario secundario, cuando este transmite de forma oportunista en regiones licenciadas del espectro que no estén siendo utilizadas. Los métodos de detección son un punto fundamental para la solución del problema escases espectral planteado por la radio cognitiva. Este capítulo abre las puertas a los métodos de detección que se van a analizar.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 16. para una mejor comprensión y correcta utilización del espectro radioeléctrico. Alcanzar mayor eficiencia en la detección y no interferencia de los usuarios secundarios a los usuarios primarios, estimar la detección más eficiente entre el intercambio de información de usuarios primarios y usuarios secundarios son las ideas esenciales dentro de las conclusiones arribadas de este capítulo..
(27) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 17. CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. En este capítulo se describen los materiales y métodos utilizados en el estudio de los métodos de detección, especialmente en el detector de energía y la detección cooperativa. En el epígrafe 2.1 se definen las métricas empleadas en la evaluación del desempeño de los métodos de detección y se presenta el modelo para la evaluación analítica del detector de energía. En el epígrafe 2.2 se define el modelo del sistema utilizado en el estudio de las reglas de fusión de decisiones para la detección. La implementación de los métodos de detección se presenta en el epígrafe 2.3. En el epígrafe 2.4 se exponen las conclusiones parciales de este capítulo. 2.1 Evaluación del desempeño de los métodos de detección El desempeño de los métodos de detección comúnmente se evalúa en base las probabilidades de detección 𝑃𝑑 y de falsa alarma 𝑃𝑓 . La probabilidad de detección es la probabilidad de detectar una señal cuando realmente está presente. La probabilidad de falsa alarma es la probabilidad de estimar la presencia de una señal cuando realmente se encuentra ausente. Entonces, cuanto mayor sea la probabilidad de detección y menor la probabilidad de falsa alarma, mejor será el desempeño de un método de detección en particular. Denotando ℋ1 y ℋ0 como la hipótesis de presencia y ausencia de las señales del usuario primario, respectivamente, las probabilidades de detección y falsa alarma pueden calcularse como: 𝑃𝑑 = Pr (ℋ1 ⃒ℋ1 ). (2.1). 𝑃𝑓 = Pr(ℋ1 ⃒ℋ0 ). (2.2).
(28) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 18. 2.1.1 Desempeño del detector de energía Denotando 𝑠(𝑛) como la señal a detectar, 𝑤(𝑛) como el ruido blanco gaussiano aditivo y 𝑛 el índice de la muestra, la señal recibida 𝑦(𝑛) puede escribirse como: 𝑦(𝑛) = 𝑠(𝑛) + 𝑤(𝑛). (2.3). Para un detector de energía, la métrica de decisión 𝜆𝐷 es la sumatoria de los cuadrados de las muestras contenidas en un vector de observación de tamaño 𝑁, esto es 𝑁. 𝜆𝐷 = ∑[𝑦(𝑛)]2. (2.4). 𝑛=0. La decisión sobre la ausencia o presencia de la señal primaria se obtiene comparando la métrica de decisión 𝜆𝐷 con un umbral prefijado 𝜆 𝑇𝐻 . Para investigar el desempeño de este método de detección, el enfoque más común empleado en la literatura es modelar el ruido y la señal transmitida por el usuario primario como variables aleatorias distribuidas normalmente con media cero y desviaciones estándar 𝜎𝑤 y 𝜎𝑠 , respectivamente. La relación señal a ruido en dB se define como 𝑆𝑁𝑅 = 10𝑙𝑜𝑔(𝜎𝑠2 /𝜎𝑤2 ). En estas condiciones, cuando la señal del usuario primario está ausente la métrica de decisión es la suma del cuadrado de 𝑁 variables aleatorias independientes con una distribución normal de varianza 𝜎𝑤2 y por tanto sigue una distribución chi-cuadrado con 𝑁 grados de libertad, cuya función de distribución acumulativa viene dada por 𝐹𝜆𝐷 (𝑥|ℋ0 ) = Γ ( 1. 𝑥 𝑁 , ) 2𝜎𝑤2 2. (2.5). 𝑥. Donde Γ(𝑥, 𝑎) = Γ(𝑎) ∫0 𝑒 −𝑡 𝑡 𝑎−1 𝑑𝑡 es la función gamma incompleta. La probabilidad de falsa alarma puede calcularse entonces como 𝑃𝑓 = 1 − Γ (. 𝜆 𝑇𝐻 𝑁 , ) 2𝜎𝑤2 2. (2.6).
(29) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 19. Cuando la señal del usuario primario está presente, la métrica de decisión también sigue una distribución chi-cuadrado, en este caso con una varianza 𝜎𝑠2 + 𝜎𝑤2 . La probabilidad de detección alarma puede calcularse entonces como 𝑃𝑑 = 1 − Γ (. 𝜆 𝑇𝐻 𝑁 , ) 2 + 𝜎𝑤 ] 2. 2[𝜎𝑠2. (2.7). En relación con la puesta en práctica hay varias opciones para la implementación práctica del detector de energía. Las implementaciones analógicas del método requieren un prefiltrado de la señal a un ancho de banda fijo, con la consiguiente inflexibilidad a la hora de detectar señales con diferentes anchos de banda. Las implementaciones digitales del método resultan más flexibles en cuanto a la posibilidad de detectar varias señales con diferentes anchos de banda simultáneamente, con el uso de la Transformada Rápida de Fourier. El detector de energía es el método de detección óptima cuando la señal de los PUs es desconocida para los SUs. Para ajustar el umbral de detección a un valor óptimo se requiere estimar la varianza del ruido. Por este motivo, el desempeño del detector de energía se ve comprometido debido a la incertidumbre en el nivel de ruido que se recibe junto con la señal a detectar. Otras dificultades asociadas a este método de detección es la incapacidad de diferenciar señales moduladas, ruido e interferencias. La sencillez de la implementación práctica del detector de energía es su principal ventaja con respecto al resto de los detectores. Tienen como desventaja que no pueden proveer de un buen desempeño en regímenes de 𝑆𝑁𝑅 reducida. Para valores de la relación señal a ruido mucho menores que la unidad (𝑆𝑁𝑅 ≪ 1), el número de muestras necesarias para satisfacer los requerimientos del detector crece proporcionalmente con 1/𝑆𝑁𝑅 2 . Mediante estudios experimentales se ha demostrado que el rendimiento teórico es válido para valores de SNR mayores -20 dB. Por debajo de los -20 dB el desempeño del detector de energía va disminuyendo progresivamente y para valores de SNR menores de -23 dB la señal no puede ser detectada independientemente del tiempo de detección empleado. Esta desviación de los valores que predicen los análisis teóricos es debido a que la varianza de ruido en sistemas reales es difícil de estimar en la práctica y puede cambiar en el tiempo..
(30) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 20. 2.2 Detección cooperativa En canales con desvanecimiento, el desempeño del método empleado en la detección de los usuarios primarios está determinado por las peores condiciones del canal debido al multitrayecto, el ensombrecimiento y la interferencia. Bajo estas condiciones, la detección correcta de los usuarios primarios puede llegar a ser un problema complejo o requerir tiempos de detección inaceptablemente largos. Sin embargo, debido a la variabilidad en las ganancias de los canales en función de las localizaciones de los usuarios secundarios, las condiciones del canal serán diferentes para un conjunto de usuarios secundarios distribuidos en un área determinada. La forma más simple de explotar esta diversidad de canal es permitir que múltiples usuarios compartan los resultados de la detección local de modo que aquellos con mejores condiciones del canal contribuyan a un proceso de detección global con mejor desempeño. La ganancia obtenida a través de la cooperación puede ser cuantificada a través de una mejora en la probabilidad de detección global o un decrecimiento en el tiempo total de detección. La ganancia que se obtiene como resultado de la detección cooperativa se maximiza cuando los usuarios secundarios perciben desvanecimientos de canal independientes. Sin embargo, el desvanecimiento puede ser causado por el ensombrecimiento y como resultado, presentar una alta correlación si dos usuarios secundarios se encuentran muy cerca. La correlación del ensombrecimiento se modela como una función exponencial de la distancia como ρ = 𝑒 −𝑎𝑑 . En un área limitada, un incremento en el número de usuarios secundarios implicados en la cooperación introduce correlación, lo cual limita la ganancia por cooperación. Los resultados experimentales muestran que la separación entre los nodos implicados en la detección cooperativa debe ser proporcional al mayor tamaño de los objetos que producen el ensombrecimiento. Para evaluar los métodos de detección cooperativa se consideró un escenario donde un conjunto de 𝑀 usuarios secundarios 𝑆 = {𝑆𝑈1 , 𝑆𝑈1 , … , 𝑆𝑈𝑀 } cooperan para la detección de un usuario primario que transmite una señal con potencia de transmisión 𝑃𝑝 . Los usuarios secundarios se encuentran distribuidos uniformemente en el borde en una celda de radio 𝑅, mientras que el usuario primario se ubica en el centro de la celda, como se muestra en la.
(31) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 21. figura 2.1. La potencia de ruido en todos los receptores secundarios tiene el mismo valor 𝜎𝑤2 . El coeficiente del canal entre el usuario primario y cada usuario secundario, ℎ𝑖 , se modela siguiendo una distribución Rayleigh de modo que la ganancia de potencia |ℎ𝑖 |2 se encuentra distribuida exponencialmente con valor medio 𝜆𝑖 .. Figura 2.1 Modelo de la detección cooperativa.. Utilizando un modelo de pérdidas de trayecto de variación exponencial con la distancia [15], el valor medio de la ganancia de potencia de cada canal se puede estimar como 𝜆𝑖 = 𝜆0 (𝑑0 /𝑑𝑖 )𝛼 , donde 𝑑 es la distancia entre el usuario primario y el usuario secundario 𝑖, 𝛼 es el exponente de la pérdida de trayecto y 𝜆0 es la ganancia a la distancia de referencia 𝑑0 . Se asume que la rapidez de variación de las ganancias de los canales es mucho menor que el tiempo de detección, de modo que durante cada intervalo de detección las ganancias de los canales permanecen constantes y son independientes entre sí. Modelando la señal transmitida por el usuario primario como una variable aleatoria distribuida normalmente con media cero, en cada intervalo de detección la varianza de esta señal en el receptor 𝑖 2 puede calcularse como 𝜎𝑠,𝑖 = 𝑃𝑡 |ℎ𝑖 |2 . En cada intervalo de detección, cada usuario. secundario realiza la detección de forma individual y envía las decisiones binarias a un procesador central, donde se combinan empleando una regla de fusión de decisiones..
(32) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 22. 2.2.1 Fusión de decisiones Todos los nodos emplean detectores de energía para realizar la detección del espectro y a cada nodo 𝑖 se asocia una probabilidad de detección 𝑃𝑑,𝑖 y una probabilidad de falsa alarma 𝑃𝑓,𝑖 que van a depender de las condiciones del canal en cada intervalo de detección. Para tomar la decisión a partir de las decisiones individuales se implementaron un conjunto de reglas de fusión de decisiones, las cuales se describen a continuación: 1. Regla "OR Lógico": Si al menos una de las decisiones individuales es ℋ1 entonces la decisión final es ℋ1 . Suponiendo que todas las decisiones son independientes, entonces las probabilidades de detección y falsa alarma de la decisión final pueden calcularse como: 𝑀 𝑃𝑑 = 1 − Π𝑖=1 (1 − 𝑃𝑑,𝑖 ),. (2.9). 𝑀 𝑃𝑓 = 1 − Π𝑖=1 (1 − 𝑃𝑓,𝑖 ).. (2.10). 2. Regla "AND Lógico": En este caso la decisión final es ℋ1 si y sólo si todas las decisiones individuales son ℋ1 , La probabilidad de la detección y la probabilidad de falsa alarma de la decisión final son: 𝑀 𝑃𝑑 = Π𝑖=1 𝑃𝑑,𝑖. (2.11). 𝑀 𝑃𝑓 = Π𝑖=1 𝑃𝑓,𝑖. (2.12). 3. Regla "factor K ": Si y sólo si las decisiones de un conjunto de K o más nodos son ℋ1 la decisión final es ℋ1 . Esta es una regla de fusión más general que las dos anteriores, a las cuales incluye como casos especiales. Para 𝐾 = 1 se comporta de igual manera que la regla "OR Lógico" y para 𝐾 = 𝑀 el resultado final es el mismo que el de la regla "AND Lógico". La probabilidad de detección y la probabilidad de falsa alarma de la decisión final son: 𝑀−𝐾 𝑀 𝑃𝑑 = ∑ ( 𝐾+1 )(1 − 𝑃𝑑,𝑖 )𝑀−𝐾−𝑖 ) ∗ (1 − 𝑃𝑑,𝑖 )𝐾+𝑖. (2.13). 𝑖=0 𝑀−𝐾 𝑀 𝑃𝑓 = ∑ ( 𝐾+1 )(1 − 𝑃𝑓,𝑖 )𝑀−𝐾−𝑖 ) ∗ (1 − 𝑃𝑓,𝑖 )𝐾+𝑖 𝑖=0. (2.14).
(33) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 23. 2.2.2 Fusión de datos En la detección cooperativa basada en la fusión de datos los resultados de la detección son enviados a un nodo central sin procesar en lugar de combinar las decisiones individuales. La comunicación de datos sin procesar puede ser muy costosa para aplicaciones prácticas debido a la sobrecarga de tráfico de señalización. Cada usuario calcula la señal de la fuente recibida incluyendo la potencia de ruido como: 𝑁−1. 𝑇𝐸𝐷,𝑖 = (1⁄𝑁) ∑ |𝑥𝑖 (𝑛)|2. (2.15). 𝑛=0. Luego lo envía al procesador central, que suma los valores de energía recogidos utilizando una combinación lineal (LC) y se obtiene la siguiente relación estadística: 𝑀. 𝑇𝐿𝐶 (𝑥) = ∑ 𝑔𝑖 𝑇𝐸𝐷,𝑖. (2.16). 𝑖=1. Donde 𝑔𝑖 es el coeficiente de la combinación, con 𝑔𝑖 ≥ 0 y sería: 𝑀. ∑ 𝑔𝑖 = 1. (2.17). 𝑖=1. Si no hay información sobre la señal de la fuente de potencia recibida por cada usuario, la EGC puede ser utilizada, es decir, 𝑔𝑖 = 1⁄𝑀 para toda 𝑖. Si la potencia de la señal recibida por la fuente de cada usuario es conocido, los coeficientes de la combinación óptima se pueden obtener. Para el caso de una baja relación señal a ruido, se puede demostrar que la óptima combinación de coeficientes están dados por [11]:. 𝑔𝑖 =. σ2𝑖 2 ∑𝑀 𝑘=1 σ𝑘. , 𝑖 = 1, … . . , 𝑀. (2.18). Donde σ2𝑖 es la señal de la fuente recibida excluyendo la potencia de ruido del usuario i. 2.3 Implementación de los métodos de detección La implementación de los métodos de detección se realizó utilizando software MATLAB, por sus potencialidades para el trabajo con vectores y sus capacidades de visualización.
(34) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 24. gráfica. MATLAB es un programa interactivo de cálculo numérico y visualización de datos. Es ampliamente usado por ingenieros para el control en el análisis y diseño, posee además una extraordinaria versatilidad y capacidad para resolver problemas en matemática aplicada, física, química, ingeniería, finanzas y muchas otras aplicaciones. Está basado en un sofisticado software de matrices para el análisis de sistemas de ecuaciones. MATLAB es un entorno de cálculo y desarrollo de aplicaciones totalmente integrado orientado para llevar a cabo proyectos en donde se encuentren implicados elevados cálculos matemáticos y la visualización gráfica de los mismos. MATLAB integra análisis numérico, cálculo matricial, procesamiento de señales y visualización gráfica en un entorno completo donde los problemas y sus soluciones son expresados del mismo modo en que se escribirían tradicionalmente, sin necesidad de hacer uso de la programación tradicional. MATLAB dispone también en la actualidad de un amplio abanico de programas de apoyo especializado, denominados toolboxes, que extienden significativamente el número de funciones incorporadas en el programa principal. Estos toolboxes cubren en la actualidad prácticamente casi todas las áreas principales en el mundo de la ingeniería y la simulación, destacando entre ellos el toolbox de procesamiento de imágenes, señales, control robusto, estadística, análisis financiero, matemática simbólica, redes neuronales, lógica difusa, identificación de sistemas, simulación de sistemas dinámicos, entre otros. Además también se dispone del programa Simulink que es un entorno gráfico interactivo con el que se puede analizar, modelar y simular la dinámica de sistemas no lineales. 2.3.1 Detector de Energía El detector de energía se implementó en la función edetector, cuyo código puede encontrarse en el Anexo 1. La función recibe como parámetros el número de muestras de la señal a detectar, la varianza de ruido y de la señal del usuario primario, el umbral de detección y el número de intervalos de detección para evaluar mediante el método de Monte Carlo el desempeño del detector. Opcionalmente, puede especificarse una probabilidad de falsa alarma en lugar de especificar el umbral de detección. En este caso el umbral de detección se determina para satisfacer esta probabilidad de falsa alarma. La función devuelve las probabilidades de detección y de falsa alarma, calculadas de forma analítica y experimental. Los resultados analíticos se evalúan directamente de las expresiones (2.6) y (2.7). Los resultados experimentales se obtienen generando un número.
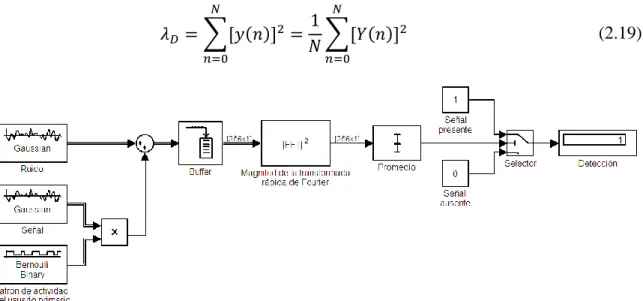
(35) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 25. suficientemente grande de muestras de la señal y el ruido a partir de la distribución normal y aplicando luego la expresión para estimar las probabilidades de detección y falsa alarma. También se implementó el detector de energía mediante una estructura en bloques en Simulink. Como se muestra en la figura 2.2, en el modelo tanto el ruido como la señal del usuario primario son simuladas mediante dos bloques generadores de ruido gaussiano blanco aditivo con media cero. La señal del usuario primario se multiplica por un generador de números binarios de Bernoulli que simula el patrón de actividad del usuario primario como una secuencia de estados de actividad e inactividad con determinada probabilidad de ocurrencia. La señal que se recibe a la entrada del detector es la suma de la señal del usuario primario y el ruido. Las muestras recibidas se almacenan en un buffer de tamaño 𝑁 que representa el vector de observación. En lugar de sumar directamente las muestras, se obtiene la magnitud de los coeficientes de la transformada rápida de Fourier elevados al cuadrado del vector de observación y la métrica de decisión se obtiene como el valor medio del vector resultante. De acuerdo con el teorema de Parseval, este proceso es equivalente a realizar la suma de los cuadrados de las muestras [16], esto es 𝑁. 𝑁. 1 𝜆𝐷 = ∑[𝑦(𝑛)] = ∑[𝑌(𝑛)]2 𝑁 2. 𝑛=0. (2.19). 𝑛=0. Figura 2.2 Estructura en bloque del Detector de Energía.. 2.3.2 Detección cooperativa La detección cooperativa se implementó en la función coopdetect mediante el código que se muestra en el Anexo 2. La función recibe como parámetros el número de usuarios secundarios que cooperan en el proceso de detección, el radio de la celda en la que se.
(36) CAPÍTULO 2. IMPLEMENTACIÓN DE DETECTORES. 26. distribuyen los nodos secundarios, la potencia de transmisión del usuario primario (en dBm), la potencia de ruido en los receptores secundarios (en dBm) y el exponente de pérdidas de trayecto del modelo de propagación. Además, como la detección individual se realiza en base al detector de energía, es necesario especificar los parámetros de la función edetector descritos en la sección anterior. La función devuelve las probabilidades de detección y falsa alarma para cada uno de los métodos de fusión de decisiones descritos en la sección 2.2.1. 2.4 Conclusiones parciales del capítulo En la mayoría de los estudios realizados, el principio básico es la detección de energía, seguida por la extracción de características cicloestacionarias. En otros ejemplos, sin llegar a utilizar un filtro adaptado, lo que se busca es tener tanta información de la señal como sea posible para efectuar procesos de correlación de señales o vectores. Los métodos utilizados para la detección de los usuarios secundarios, el detector de energía y la detección cooperativa utilizando fusión de datos son técnicas robustas en cuanto a los métodos de cálculo..
(37) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 27. CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. En este capítulo se realiza un análisis de los resultados alcanzados. En el epígrafe 3.1 se muestran los resultados que se obtuvieron utilizando el detector de energía. En el epígrafe 3.2 se describen de forma general los experimentos realizados y se comparan las diferentes estrategias de fusión de decisiones en la detección cooperativa. En el epígrafe 3.3 se presentan las conclusiones parciales del capítulo. 3.1. Detector de Energía. A continuación se muestran los resultados analíticos y simulados obtenidos en la evaluación del desempeño del detector de energía. Se utilizarán como métricas fundamentales para la evaluación las probabilidades de detección y de falsa alarma. En la figura 3.1 se muestra la probabilidad de detección 𝑃𝐷 en función del tamaño del vector de observación para diferentes valores del umbral de detección, una varianza de ruido 𝜎𝑤2 = 0.5 y una varianza de la señal del usuario primario 𝜎𝑠2 = 0.1. Puede notarse que los valores obtenidos mediante simulación son muy cercanos a los resultados teóricos. Como es de esperar, la probabilidad de detección se incrementa con el número de muestras contenidas en el vector de observación y con el decremento en el umbral de detección. Sin embargo, no es posible analizar estos resultados al margen de los resultados que se obtienen en la probabilidad de falsa alarma. Como puede notarse en la figura 3.2, un incremento en el número de muestras también trae aparejado consigo un incremento en la probabilidad de falsa alarma..
(38) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 28. 1 0.9. Probabilidad de detección. 0.8 0.7 0.6 0.5 0.4 0.3 TH = 70 (Análisis). 0.2. TH = 100 (Análisis) TH = 130 (Análisis). 0.1. Simulación 0 50. 100. 150. 200. 250. 300. Numero de muestras. Figura 3.1 Probabilidad de detección en el detector de energía en función del tamaño del vector de observación, para diferentes umbrales de detección y varianzas de ruido 𝜎𝑤2 = 0.5 y de la señal del usuario primario 𝜎𝑠2 = 0.1, respectivamente.. El objetivo de diseño en este detector debe ser entonces llegar a una relación de compromiso que garantice un balance entre las probabilidades de falsa alarma y detección correcta. Si se incrementa el número de muestras, existe mayor probabilidad de que la sumatoria de estas muestras sea mayor que el umbral cuando el usuario primario está presente, pero como también se suman la misma cantidad de muestras cuando solo hay ruido, entonces se incrementa la probabilidad de falsa alarma. Por este motivo, en el detector de energía es muy difícil lograr un comportamiento ideal donde la probabilidad de detección sea cercana a la unidad y la de falsa alarma cero. Esta relación entre las probabilidades de detección y falsa alarma puede comprenderse con mejor claridad analizando el gráfico de la figura 3.3, en el que se muestran las curvas características del detector para diferentes valores del umbral de detección. Puede notarse que incrementando el valor del umbral de detección las curvas características se acercan a un comportamiento ideal, lo cual se logra a expensas de un incremento significativo en el tamaño del vector de observación y por tanto del tiempo empleado en la detección..
(39) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 29. 1 TH = 70 (Análisis) 0.9. TH = 100 (Análisis) TH = 130 (Análisis). 0.8. Probabilidad de falsa alarma. Simulación 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 50. 100. 150. 200. 250. 300. Numero de muestras. Figura 3.2 Probabilidad de falsa alarma en el detector de energía en función del tamaño del vector de observación, para diferentes umbrales de detección y varianzas de ruido 𝜎𝑤2 = 0.5 y de la señal del usuario primario 𝜎𝑠2 = 0.1, respectivamente. 1 240 Muestras 0.9. Probabilidad de detección. 0.8 0.7. Comportamiento ideal 125 Muestras. 0.6 0.5 0.4 0.3 0.2. TH = 70 TH = 100. 0.1 0. TH = 130 0. 0.1. 0.2. 0.3. 0.4. 0.5. 0.6. 0.7. 0.8. 0.9. 1. Probabilidad de falsa alarma. Figura 3.3 Curvas características del detector, para diferentes umbrales de detección y varianzas de ruido 𝜎𝑤2 = 0.5 y de la señal del usuario primario 𝜎𝑠2 = 0.1, respectivamente.. En la figura 3.4 se muestra la dependencia entre el número de muestras requeridas para alcanzar una probabilidad de detección dada y la relación señal a ruido, para un umbral de.
(40) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 30. detección 𝜆 𝑇𝐻 = 200. La probabilidad de detección se mantiene constante a lo largo de cada curva. Los resultados se obtuvieron variando la varianza de la señal a detectar entre 0.5 y 1, para una varianza de ruido constante 𝜎𝑠2 = 0.1. Puede notarse que existe una dependencia casi lineal entre la relación señal a ruido y el número de muestras necesario y como es de esperarse, cuando disminuye la relación señal a ruido (el usuario primario transmite con menos potencia) se necesita un mayor número de muestras para alcanzar determinada probabilidad de detección. 300. 0.5 0. 33 33 3. Tamaño del vector de observación. 0.6 66 67 0. 83 33 3 0. 66 66 7. 250 0. 83 33 3. 0. 0.33 5 33 3. 0. 16 66 7. 0. 0.3 5 33 33. 0.1 66 67. 0.1 66 67. Mayor probabilidad de detección. 200. 150. 0. -1. -2. -3. -4. -5. -6. Relación señal a ruido (dB). Figura 3.4 Número de muestras requeridas para satisfacer una probabilidad de detección dada en función de la relación señal a ruido, para un umbral de detección 𝜆 𝑇𝐻 = 200 y una varianza de ruido 𝜎𝑤2 = 0.5. La probabilidad de detección se mantiene constante a lo largo de cada curva.. 3.2. Detección Cooperativa. Las simulaciones se realizaron siguiendo el método de Monte Carlo, para lo cual se evalúo el desempeño de los métodos de detección cooperativa para un número suficientemente grande de intervalos de detección. Las métricas de desempeño se obtuvieron promediando los valores obtenidos para cada escenario. Como parámetros del modelo de propagación, se utilizaron como valores prácticos un exponente de pérdidas de trayecto 𝛼 = 4, una distancia de referencia 𝑑0 = 1 𝑚 y un coeficiente de canal a la distancia de referencia 𝜆0 = 10−4 [15]. En todas las simulaciones realizadas, la potencia de ruido en los receptores.
(41) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 31. secundarios es de −100 dBm y la celda en la que se distribuyen los usuarios secundarios tiene un radio de 200 𝑚. Se realizaron 5000 iteraciones en cada escenario de simulación. A continuación se discuten los resultados obtenidos en la evaluación del desempeño de la detección cooperativa utilizando diferentes métodos de decisiones. La figuras 3.5 y 3.6 muestran un conjunto representativo de curvas de desempeño de los métodos de fusión investigados, donde se compara el desempeño de los diferentes métodos en función del número de usuarios secundarios que cooperan. Para obtener estos resultados, todos los detectores individuales operan con iguales parámetros: un umbral de detección 𝜆 𝑇𝐻 = 10−8 y un tamaño del vector de observación 𝑁 = 100. El usuario primario transmite con una potencia de 30 𝑑𝐵𝑚, de modo que las diferencias en el desempeño individual de los detectores quedan determinada por el valor de los coeficientes del canal en cada intervalo de detección. En el caso de la regla de fusión Factor-K, se toma 𝐾 = 𝑚𝑖𝑛(4, 𝑀).. 1. Probabilidad de detección. 0.9. 0.8. 0.7. 0.6. 0.5 AND-Lógico. 0.4. OR-Lógico Factor-K (K = 4) 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Número de usuarios secundarios. Figura 3.5 Probabilidad de detección en el esquema de detección cooperativa en función del número de usuarios secundarios para diferentes métodos de fusión de decisiones, para un umbral de detección 𝜆 𝑇𝐻 = 10−8 , un tamaño del vector de observación 𝑁 = 100 y una potencia de transmisión del usuario primario de 30 dBm y 𝐾 = 4 para la regla Factor-K.. De estos resultados, puede notarse que la regla OR-lógico tiene un desempeño significativamente superior a la regla AND-lógico en términos de probabilidad de detección, pero a expensas de un incremento en la probabilidad de falsa alarma, mientras.
Figure




+7





Documento similar