Una arquitectura para la coordinación de múltiples robots
Texto completo
Figure


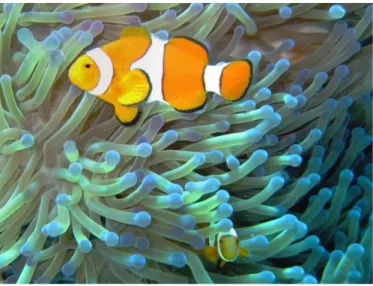
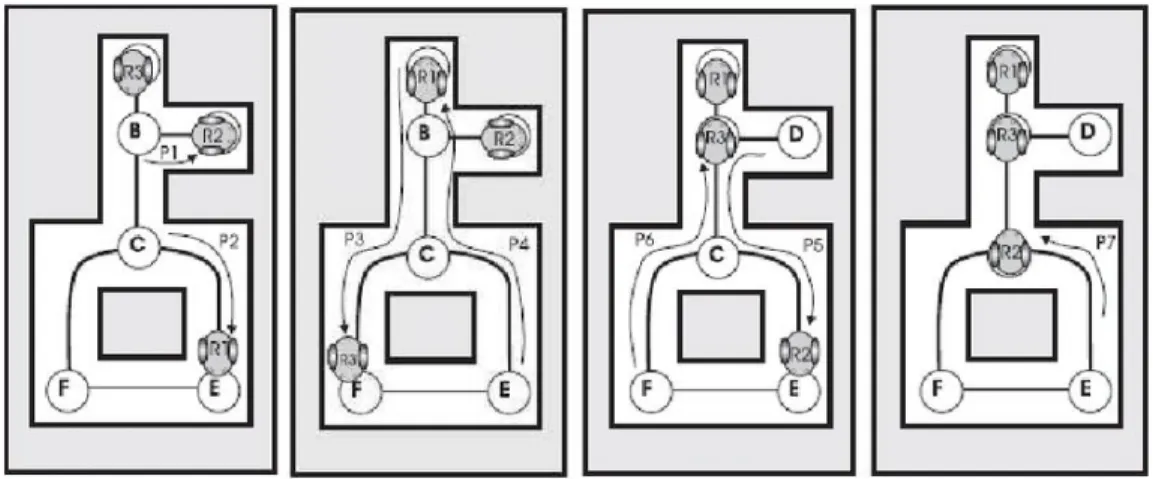
![Figura 2.3. Organización múltiple natural (Tomada de [17])](https://thumb-us.123doks.com/thumbv2/123dok_es/2866219.548005/27.918.243.677.384.821/figura-organización-múltiple-natural-tomada-de.webp)
Documento similar
scheme with correction has been proven as accurate as the second order scheme, a double simulation with the standard anisotropic model with
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Imparte docencia en el Grado en Historia del Arte (Universidad de Málaga) en las asignaturas: Poéticas del arte español de los siglos XX y XXI, Picasso y el arte español del
Que en la reumon de la Comisión de Gestión Interna, Delegada del Consejo Social, celebrada el día 17 de marzo de 2011 , con quórum bastante para deliberar y
El estudio de la sostenibilidad, como proyecto para la construcción de imaginarios culturales comprometidos con el medioambiente, compete a la comunicación más allá
– Las salidas (outputs) que produce el sistema de comunicación social de la ciencia son, entre otras, éstas: información y divulgación científica y tecnológica, valoración de
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Lo más característico es la aparición de feldespatos alcalinos y alcalino térreos de tamaño centimétrico y cristales alotriomorfos de cuarzo, a menudo en agregados policristalinos,
