Mejoramiento del proceso de detección de defectos visuales en castañas, con fines de exportación
178
0
0
Texto completo
(2) MEJORAMIENTO DEL PROCESO DE DETECCIÓN DE DEFECTOS VISUALES EN CASTAÑAS, CON FINES DE EXPORTACIÓN. Esta versión definitiva de tesis contiene las correcciones y alteraciones sugeridas por la comisión del jurado durante la defensa realizada por Claudia Cervantes Jilaja.. Comisión del jurado: Mgter. Olha Sharhorodska Mgter. Eveling Gloria Castro Gutierrez Mgter. Carlo José Luis Corrales Delgado.
(3) Dedico este trabajo a mis padres Margarita y Julián, mis hermanos Carolina y Alex, y a mis amigos del Grupo de Investigación en la Línea de Automatización Industrial, Robótica y Visión Computacional (LARVIC). Gracias por su apoyo, compañía y enseñanzas..
(4) Agradecimientos. A Dios, por haberme dado una familia, que a pesar de las adversidades siempre estamos unidos, también por poner personas en mi camino que me ayudan a crecer y que permita que yo pueda ayudarlos a ellos. A mis padres Margarita y Julián, por su amor, por enseñarme que todo se puede si uno se esfuerza por hacerlo. A mis hermanos Carolina y Alex que son un ejemplo a seguir, gracias por su amistad, complicidad y por sus consejos. A la Universidad Nacional de San Agustín, por haberme dado la oportunidad de estudiar. A los profesores de la Escuela Profesional de Ingeniería de Sistemas (EPIS), quienes fueron actores importantes en mi formación profesional, aprendí bastante de cada uno de ellos. A Raquel Patiño Escarcina quien es mi asesora y a Dennis Barrios Aranibar por hacerme parte del equipo cuando ya estaban en la etapa final del proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas”, dándome la oportunidad de trabajar con ellos; además por mostrarme y enseñarme que hay muchas cosas por aprender. A mis amigos del Grupo de Investigación en la Línea de Automatización Industrial, Robótica y Visión Computacional (LARVIC), en especial a Raquel Patiño y Dennis Barrios son dos personas que respeto y admiro no solo en lo profesional sino por los valores que tienen y que enseñan, también a María Fernanda Tejada, Elizabeth Morales, Yessica Rosas, Liz Bernedo, Hernán Álvarez, Edwin Bolívar, Emil Cuadros, Alejandro Camargo, Percy Lovon, Roger Ripas, Víctor Cornejo, Kevin Rodríguez y Yordi Díaz, son amigos con los que compartí estos últimos años y con los que comenzamos a investigar, conocer, experimentar, fuimos a competencias, realizamos publicaciones y discutimos nuestras ideas donde hubo conflictos, alegrías y tristezas; pero siempre estuvimos ahí para ayudar, celebrar, desafiar, para hacer amanecidas cuando se requería y sobre todo para divertirnos. Finalmente quiero agradecer a todas aquellas personas que directa o indirectamente participaron de este trabajo.. La aventura de la vida es aprender, el objetivo de la vida es crecer, la naturaleza de la vida es cambiar, el desafío de la vida es superarse, la esencia de la vida es cuidar, el secreto de la vida es atreverse, la belleza de la vida es dar, la alegría de la vida es amar. por William Ward. I.
(5) Resumen. Actualmente, una importante actividad económica en algunos países de América del Sur como Perú, Bolivia y Brasil es el comercio de frutos secos como castañas; sin embargo, antes de exportarlos es necesario ejecutar un proceso de control de calidad que implica el estado de madurez, detección e identificación de defectos, daños o enfermedades; de manera que posteriormente realice una clasificación del producto. Todo ello se realiza teniendo en cuenta las características externas del producto mediante la obtención de descriptores de color, forma, tamaño y textura; estos descriptores se usan en la detección e identificación de los defectos de frutas u objetos. Esta tesis propone la automatización de la detección e identificación de defectos visuales en un objeto, donde se divide el objeto en dos regiones (una oscura y otra clara) debido a los colores similares que presentan los defectos con el objeto; para detectar la presencia de defectos se basa en la textura de cada región, se propone el algoritmo de Detectar Defecto (Alg. 2 y 3) que utiliza el descriptor de Primer Orden (Alg. 5) para identificar la región donde el defecto es encontrado. Posteriormente, los descriptores de color, tamaño y textura se utilizan para la identificación de los defectos específicos a través de la Segmentación por Color y Tamaño (Alg. 4) para identificar una variedad de colores oscuros y claros y el descriptor de Primer Orden para identificar texturas ásperas o rugosas; estos algoritmos dan la posición central y tamaño de los defectos encontrados. Esta propuesta fue implementado y probado en la base de datos para el proceso de detección de defectos visuales en castañas, permite mejorar e incrementar la calidad de las castañas para su comercio internacional. Los resultados experimentales (Imágenes sin Entrenamiento – 60 % de la Base de Datos) muestran que esta propuesta tiene una tasa de eficiencia de 97.90 % con un tiempo de procesamiento de 25 ms en el peor y 17 ms en el mejor de los casos por cada imagen procesada; estos resultados mejoran los resultados del algoritmo del proyecto [Proy.PIPEA_134, 2013] donde la tasa de eficiencia es 91.06 % con un tiempo de procesamiento de 43 ms. Palabras Clave: Automatización, visión computacional, espacios de color, descriptor de primer orden, detección e identificación.. II.
(6) Abstract. Currently, an important economic activity in some countries of South America such as Peru, Bolivia and Brazil is the trade dry fruits like chestnuts; however, before exporting them it is necessary to execute quality control processes, these processes imply the revision of the state of maturity, detection and identification of defects, damages or diseases; so that later it makes a classification of the product. All this is done taking into account the external characteristics of the product by obtaining descriptors of color, shape, size and texture; these descriptors are used in the detection and identification of fruit or object defects. This thesis proposes the automation of the detection and identification of visual defects in an object, where the object is divided into two regions (one dark and one light) due to similar colors that present the defects with the object; to detect the presence of defects is based on the texture of each region, we propose the Algorithm Detect Defect (Alg. 2 and 3) that uses the First Order descriptor (Alg. 5) to identify the region where the defect is found. Subsequently, color, size and texture descriptors are used to identify specific defects through the Segmentation by Color and Size (Alg. 4) to identify a variety of dark and light colors and the First Order descriptor to identify rough textures; these algorithms give the central position and size of the defects found. This proposal was implemented and tested in the database for the process of detection of visual defects in chestnuts, allows improve and increase the quality of chestnuts for international trading. Experimental results (Images without Training - 60 % of the Database) show that this proposal has an efficiency rate of 97.90 % with a processing time of 25 ms in the worst and 17 ms in the best case for each processed image; these results improve the results of the project algorithm [Proy.PIPEA_134, 2013] where the efficiency rate is 91.06 % with a processing time of 43 ms. Keywords: Automation, computer vision, color spaces, first order descriptor, detection and identification.. III.
(7) Índice general. Contenido. IV. Lista de Figuras. VII. Lista de Tablas. XII. 1. Introducción 1.1. Planteamiento del Problema . . . . . . . . . . . . . . . 1.2. Definición del Problema . . . . . . . . . . . . . . . . . 1.3. Justificación . . . . . . . . . . . . . . . . . . . . . . . . 1.4. Delimitaciones . . . . . . . . . . . . . . . . . . . . . . 1.5. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . 1.5.1. Objetivo General . . . . . . . . . . . . . . . . . 1.5.2. Objetivos Específicos . . . . . . . . . . . . . . . 1.6. Hipótesis de la Investigación . . . . . . . . . . . . . . . 1.7. Variables e Indicadores . . . . . . . . . . . . . . . . . . 1.7.1. Variable Independiente . . . . . . . . . . . . . . 1.7.2. Variable Dependiente . . . . . . . . . . . . . . . 1.8. Indicadores de Validez . . . . . . . . . . . . . . . . . . 1.9. Cobertura de Estudio . . . . . . . . . . . . . . . . . . . 1.9.1. Universo . . . . . . . . . . . . . . . . . . . . . 1.9.2. Muestra . . . . . . . . . . . . . . . . . . . . . . 1.10. Viabilidad de la investigación . . . . . . . . . . . . . . . 1.10.1. Viabilidad Técnica . . . . . . . . . . . . . . . . 1.10.2. Viabilidad Económica . . . . . . . . . . . . . . 1.11. Tipo y Nivel de Investigación . . . . . . . . . . . . . . . 1.11.1. Tipo de Investigación . . . . . . . . . . . . . . . 1.11.2. Nivel de Investigación . . . . . . . . . . . . . . 1.12. Método y Diseño de la Investigación . . . . . . . . . . . 1.12.1. Método de la Investigación . . . . . . . . . . . . 1.12.2. Diseño de la Investigación . . . . . . . . . . . . 1.13. Técnicas e Instrumentos de Recolección de Información 1.13.1. Técnicas . . . . . . . . . . . . . . . . . . . . . 1.13.2. Instrumentos . . . . . . . . . . . . . . . . . . . 1.14. Cronograma y Presupuesto . . . . . . . . . . . . . . . . 1.14.1. Cronograma . . . . . . . . . . . . . . . . . . . . 1.14.2. Presupuesto . . . . . . . . . . . . . . . . . . . . 1.15. Organización de la tesis . . . . . . . . . . . . . . . . . . IV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 1 1 2 2 2 3 3 3 4 4 4 4 4 4 4 4 4 4 5 5 5 5 5 5 6 6 6 6 7 7 8 8.
(8) 2. Estado de Arte 2.0.1. Automatización del Proceso de Selección . . . . . . . . . . . . . . . . . . . . . 2.0.2. Procesamiento digital de imagen aplicados a Productos Agroindustrial . . . . . .. 10 10 11. 3. Marco Teórico 3.1. Castaña . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1.1. Aspectos Biológicos . . . . . . . . . . . . . . . . . 3.1.2. Evaluación de Calidad y Clasificación de la Castaña 3.2. Análisis de Imágenes Digitales . . . . . . . . . . . . . . . . 3.2.1. Modelos de Colores . . . . . . . . . . . . . . . . . 3.2.2. Operadores Morfológicos . . . . . . . . . . . . . . 3.2.3. Segmentación de imágenes . . . . . . . . . . . . . . 3.2.4. Descriptor de Color . . . . . . . . . . . . . . . . . . 3.2.5. Descriptor de Textura . . . . . . . . . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. 14 14 15 16 20 20 30 32 37 39. 4. Propuesta: Detección e Identificación de Defectos Visuales en el Objeto 4.1. Vista General de la Propuesta . . . . . . . . . . . . . . . . . . . . . . 4.2. Propuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2.1. Presenta Defectos el Objeto . . . . . . . . . . . . . . . . . . 4.2.2. Identificación de Defectos . . . . . . . . . . . . . . . . . . . 4.2.3. Clasificación . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. . . . . .. 42 42 47 47 54 63. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. . . . . . . . . .. 5. Experimentos y Resultados 5.1. Base de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Implementación de la propuesta al Mejoramiento del Proceso de Detección de Defectos visuales en Castañas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.1. Pre-procesamiento y Segmentación de la Castaña . . . . . . . . . . . . . . . . . 5.2.2. Presenta Defectos el Objeto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2.3. Identificación de Defectos por cada Región . . . . . . . . . . . . . . . . . . . . 5.2.4. Clasificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3. Pruebas de Validación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.1. Evaluación de la Detección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.2. Base de Datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3.3. Pruebas en Imágenes de Entrenamiento (40 % de la base de Datos) . . . . . . . . 5.3.4. Pruebas en Imágenes sin Entrenamiento (60 % de la base de Datos) . . . . . . . 5.4. Obtención del Tiempo de Procesamiento . . . . . . . . . . . . . . . . . . . . . . . . . . 5.5. Obtención de la Productividad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.6. Descripción de la interfaz de usuario . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.6.1. Proceso Automático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.6.2. Proceso de Calibración Semi-automática . . . . . . . . . . . . . . . . . . . . .. 65 65 66 66 68 80 98 99 99 101 102 105 108 109 111 111 113. 6. Conclusiones y Trabajos Futuros 119 6.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119 6.2. Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120 6.3. Sugerencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120 Bibliografía. 127.
(9) A. Resultados de Pruebas A.1. Buenas (sin defectos) . . . . . . . . . . . . . . A.2. Defecto Visual: Cáscara . . . . . . . . . . . . . A.3. Defecto Visual: Ojos . . . . . . . . . . . . . . A.4. Defecto Visual: Manchada . . . . . . . . . . . A.5. Defecto Visual: Rancia . . . . . . . . . . . . . A.6. Defecto Visual: Desportillada . . . . . . . . . . A.7. Defectos visualizados en la Interfaz Automática. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. . . . . . . .. 128 128 131 133 135 137 139 140. B. Herramientas de Desarrollo de Software. 152. C. Artículos Presentados a Eventos Científicos. 154. D. Resultados de Pruebas de la Detección de Defectos en la base de datos de Tejidos en Lana de Alpaca 156 D.1. Defecto - Aguja Rota . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157 D.2. Defecto - Hueco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159 D.3. Defecto - Nudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160 D.4. Defecto - Punto Corrido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.
(10) Índice de figuras. 3.1. Fruto de la Castaña (Fuente: [Arias and Rondón, 2010, Brasil_Nuts, 2016]) . . . . . . . 3.2. Semilla de Castaña (Fuente: [Arias and Rondón, 2010, Brasil_Nuts, 2016]) . . . . . . . 3.3. La exportación de la Castaña, se da por: (a) Castaña con Cáscara y (b) Castaña sin Cáscara (Fuente: [Brasil_Nuts, 2016, FAO, 2016]) . . . . . . . . . . . . . . . . . . . . . . . 3.4. Imagen del Modelo Monocromático (Fuente: Elaboración Propia) . . . . . . . . . . . . 3.5. Imagen del Modelo Escala de Grises (Fuente: Elaboración Propia) . . . . . . . . . . . . 3.6. Espacio de Color RGB (Fuente: [Sucar and Gómez, 2001]) . . . . . . . . . . . . . . . . 3.7. Espacio de Color HSI (Fuente: [Sucar and Gómez, 2001]) . . . . . . . . . . . . . . . . . 3.8. Espacio de Color HSV (Fuente: [Sucar and Gómez, 2001]) . . . . . . . . . . . . . . . . 3.9. Espacio de Color HLS (Fuente: [Sucar and Gómez, 2001]) . . . . . . . . . . . . . . . . 3.10. Primera fila muestra los ejemplos de elementos estructurales, la segunda fila muestra la conversión de los elementos estructurales a una matriz rectangular. Los puntos denotan el centro u origen de los elementos estructurales (Fuente: [Gonzalez and Wood, 2008]) . 3.11. Imagen A (Fuente: [Gonzalez and Wood, 2008]) . . . . . . . . . . . . . . . . . . . . . . 3.12. Muestra la Operación Dilatación, incrementa los límites de la región de interés y rellena agujeros (Fuente: [Gonzalez and Wood, 2008]) . . . . . . . . . . . . . . . . . . . . . . 3.13. Muestra la Operación Erosión, reduce los límites de la región de interés y agranda agujeros (Fuente: [Gonzalez and Wood, 2008]) . . . . . . . . . . . . . . . . . . . . . . . . 3.14. Muestra la Operación Apertura (Fuente: [Gonzalez and Wood, 2008]) . . . . . . . . . . 3.15. Muestra la Operación de Cierre (Fuente: [Gonzalez and Wood, 2008]) . . . . . . . . . . 3.16. (a) Muestra una imagen en escala de gris y (b) Muestra el umbral de la imagen en escala de gris o una imagen de un canal de un espacio determinado (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.17. Threshold Binary (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . . . . . . 3.18. Inverse Binary Thresholding (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . 3.19. Threshold Truncate (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . . . . . 3.20. Threshold to Zero (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . . . . . . 3.21. Inverted Threshold to Zero (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . 3.22. Multiple thresholding (Fuente: [OpencvManual, 2012, Opencv, 2016]) . . . . . . . . . . 3.23. Gráfico de distribución de las intensidades de gris y la cantidad de pixeles, que representa un Histograma (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . 3.24. Histograma de una imagen (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . 3.25. Color Dominante del Plátano (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 3.26. Color Dominante de Fresas y Uvas (Fuente: Elaboración Propia) . . . . . . . . . . . . .. VII. 15 15 16 20 21 22 24 25 26. 30 31 31 31 32 32. 33 33 34 34 34 35 36 38 38 38 39.
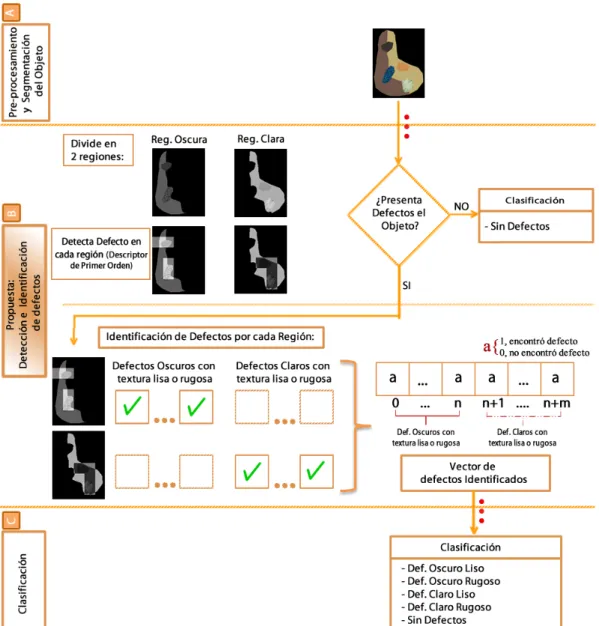
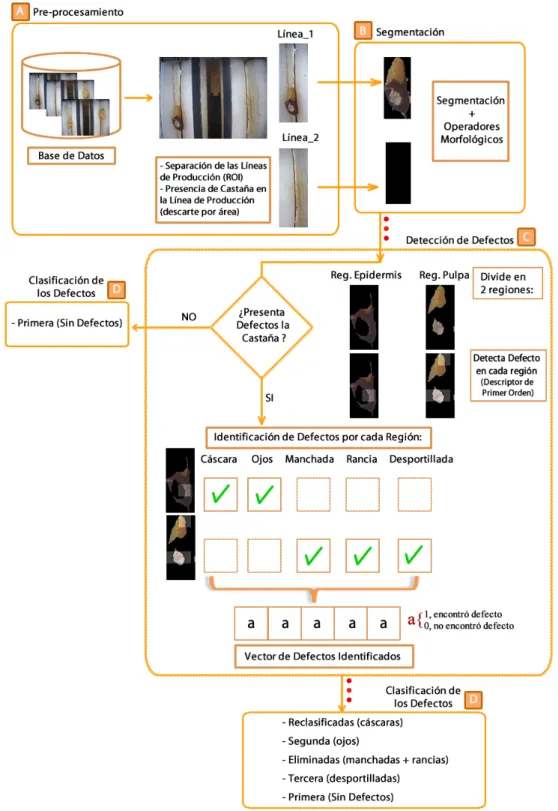
(11) 3.27. Ejemplos de texturas no regulares y sus histogramas. Del lado izquierdo se muestran 3 ejemplos de mosaicos con dos texturas diferentes cada uno, del lado derecho se ilustra el histograma correspondiente a cada imagen. Se puede notar que en dos casos, primero y tercero, se distinguen dos “picos” en el histograma, correspondientes a cada textura (Fuente: [Sucar and Gómez, 2001]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1. Flujo-grama del algoritmo del proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas” para la Detección de Defectos Visuales en Castañas (Fuente: [Proy.PIPEA_134, 2013]) 4.2. Flujo-grama del algoritmo propuesto para la Detección e Identificación de Defectos visuales en el Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . 4.3. Flujo-grama del algoritmo propuesto implementado al Mejoramiento del Proceso de Detección de Defectos visuales en Castañas (Fuente: Elaboración Propia) . . . . . . . . . . 4.4. Descripción del Objeto, (a) A colores y (b) En escala de gris (Fuente: Elaboración Propia) 4.5. Divide el Objeto en dos Regiones (Oscura y Clara): (a) Imagen Segmentada, (b) Escala de gris, (c) Filtro mediana, (d) Umbralización (región oscura y clara), (e) Erosión (región oscura y clara) y (f) Fusión (región oscura y clara) (Fuente: Elaboración Propia) . . . . . 4.6. (a) Divide la región en 4 sectores (A, B, C y D), donde cada recuadro es analizado por el Descriptor de Primer Orden, (b) Región Oscura del Objeto y (c) Región Oscura del Objeto dividida en 4 sectores (A, B, C y D) (Fuente: Elaboración Propia) . . . . . . . . . 4.7. Dimensión del recuadro, donde (a) Dimensión de “20 x 20”, (b) Dimensión de “30 x 30” y (c) Dimensión de “50 x 50” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 4.8. Recta de la Desviación Estándar en la Región Oscura del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.9. Recta de la Desviación Estándar en la Región Clara del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.10. Imagen procesada por el algoritmo de Segmentación por Color y Tamaño (Alg. 4) para la detección de defectos oscuros o claros de textura lisa o rugosa del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.11. (a) Detección de Defectos por cada Región y (b) Vector de Defectos Identificados en el Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1. Separación de líneas de producción, (a) Imagen Original, (b) Regiones de Interes (ROI), (c) Línea de Producción 1 y (d) Línea de Producción 2 (Fuente: Elaboración Propia) . . . 5.2. Segmentación de una Castaña sin defectos: (a) Imagen Original (RGB) (b) Canal R del espacio. 39. 43 45 46 47. 47. 49 52 53 54. 56 62. 66. RGB, (c) Umbralización, (d) Operadores Morfológicos, (e) Descarte por Áreas (f) Imagen Fusionada (entre (e) y (a)) y (g) Imagen recortada que se convierte en la imagen Segmentada (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3. Segmentación de una Castaña con defecto “Ojos”: (a) Imagen Original (RGB) (b) Canal R del espacio RGB, (c) Umbralización, (d) Operadores Morfológicos, (e) Descarte por Áreas (f) Imagen Fusionada (entre (e) y (a)) y (g) Imagen recortada que se convierte en la imagen Segmentada (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 68. 5.4. Parámetros para el Filtro Mediana (a) Segmentada, (b) Escala de gris, (c) Mediana = 3, (d) Mediana = 5, (e) Mediana = 7, (f) Mediana = 9 y (g) Mediana = 11 (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 69. 68.
(12) 5.5. Resultado de las pruebas realizadas para encontrar el umbral óptimo al dividir la Castaña en dos Regiones, donde el caso 3 obtuvo una mayor eficiencia que el resto, permitiendo eliminar los problemas en los defectos ojos claros, cáscara y manchada (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.6. Divide la Castaña en dos Regiones (Epidermis y Pulpa ): (a) Segmentada, (b) Escala de gris, (c) Filtro mediana, (d) Umbralización (epidermis y pulpa), (e) Erosión (epidermis y pulpa) y (f) Fusión (epidermis y Pulpa) (Fuente: Elaboración Propia) . . . . . . . . . . . 5.7. Dimensión del recuadro, donde (a) Dimensión de “20 x 20”, (b) Dimensión de “30 x 30” y (c) Dimensión de “50 x 50” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 5.8. (a) Divide la región en 4 sectores (A, B, C y D), donde cada recuadro es analizado por el Descriptor de Primer Orden, (b) Región de la Pulpa de la Castaña y (c) Región de la Pulpa de la Castaña dividida en 4 sectores (A, B, C y D) (Fuente: Elaboración Propia) . . 5.9. Resultado de las pruebas realizadas para encontrar defectos en la Región de la Epidermis de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 5.10. Recta de la Desviación Estándar en la Región de la Epidermis de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.11. Resultado de las pruebas realizadas para encontrar defectos en la Región de la Pulpa de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . 5.12. Recta de la Desviación Estándar en la Región de la Pulpa de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.13. Resultado de las pruebas realizadas para identificar el defecto “Ojos” en la Región de la Epidermis de la Castaña, donde el caso 3 del espacio de color HSV obtuvo una mayor eficiencia que el resto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . 5.14. Resultado de las pruebas realizadas para identificar el defecto “Cáscara” en la Región de la Epidermis de la Castaña, donde el caso 2 obtuvo una mayor eficiencia que el resto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.15. Resultado de las pruebas realizadas para identificar el defecto “Manchadas” en la Región de la Pulpa de la Castaña, donde el espacio de color XYZ del caso 2 obtuvo una mayor eficiencia que el resto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . 5.16. Resultado de las pruebas realizadas para identificar el defecto “Rancia” en la Región de la Pulpa de la Castaña, donde el caso 2 del espacio de color XYZ obtuvo una mayor eficiencia que el resto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . 5.17. Resultado de las pruebas realizadas para identificar el defecto “Desportillada” en la Región de la Pulpa de la Castaña, donde el caso 1 del espacio de color RGB obtuvo una mayor eficiencia que el resto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 5.18. (a) Detección de Defectos por cada Región y (b) Vector de Defectos Identificados de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.19. Espacio ROC (Fuente: [Fawcett, 2006]) . . . . . . . . . . . . . . . . . . . . . . . . . . 5.20. Muestra la Base de Datos [Proy.PIPEA_134, 2013], la cual consta de Imágenes de Entrenamiento (40 %) e Imágenes sin Entrenamiento (60 %) (Fuente: Elaboración Propia) . 5.21. Tiempo de Procesamiento por cada imagen de una Línea de Producción en milisegundos (ms), aplicado a 180 imágenes (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . 5.22. Productividad de una Línea de Producción del Algoritmo Propuesto comparada con el Algoritmo del Proyecto [Proy.PIPEA_134, 2013] (Fuente: Elaboración Propia) . . . . . 5.23. Interfaz de Usuario para la detección e identificación de defectos visuales en Castañas (Automático). Muestra la identificación del defecto de Ojos (Fuente: Elaboración Propia). 69. 71 72. 72 73 74 76 76. 83. 86. 90. 92. 95 97 100 101 109 110 111.
(13) 5.24. Interfaz de Usuario para la detección e identificación de defectos visuales en Castañas (Automático). Muestra la identificación de los defectos de: Ojos, Manchada y Desportillada (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.25. Interfaz de Usuario para la detección e identificación de defectos visuales en Castañas (Automático). Muestra una castaña sin defectos (Fuente: Elaboración Propia) . . . . . . 5.26. Interfaz de Usuario para Dividir la Castaña en dos Regiones (Epidermis y Pulpa), siendo este caso de una castaña con defecto “Ojo, Manchada y Desportillada"(Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.27. Interfaz de Usuario para Dividir la Castaña en dos Regiones (Epidermis y Pulpa), siendo este caso de una castaña con defecto “Ojos y Manchada” (Fuente: Elaboración Propia) . 5.28. Interfaz de Usuario para Detectar la presencia de defectos en la Región de la Epidermis de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 5.29. Interfaz de Usuario para Detectar la presencia de defectos en la Región de la Pulpa de la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.30. Interfaz de Usuario para la Calibración Semi-automática para la Segmentación por Color y tamaño. Siendo en este caso la detección del defecto "Manchada"(Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.31. Interfaz de Usuario. Sección A muestra la Selección de un determinado espacio de color y de uno de sus 3 canales (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . 5.32. Interfaz de Usuario. Sección B muestra la Selección de umbralización, además de los parámetros de tipo de umbralización y sus valores mínimo y máximo (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.33. Interfaz de Usuario. Sección C muestra el filtro por descarte de áreas a través de un área mínima y máxima (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . 5.34. Interfaz de Usuario. Sección D muestra los Operadores Morfológicos, indicando el tipo de operador, número de iteraciones, tipo y tamaño del elemento estructural (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.1. Interfaz Autómatica, muestra la detección de defecto “Cáscara” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.2. Interfaz Autómatica, muestra la detección de defecto “Cáscara” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.3. Interfaz Autómatica, muestra la detección de defecto “Ojos Claros” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.4. Interfaz Autómatica, muestra la detección de defecto “Ojos Oscuros” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.5. Interfaz Autómatica, muestra la detección de defecto “Manchadas Claras” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.6. Interfaz Autómatica, muestra la detección de defecto “Manchadas Oscuras” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.7. Interfaz Autómatica, muestra la detección de defecto “Rancia” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.8. Interfaz Autómatica, muestra la detección de defecto “Desportillada” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A.9. Interfaz Autómatica, muestra la detección de defecto “Desportillada”, sin embargo fueron identificadas como Ojos y Manchadas (Fuente: Elaboración Propia) . . . . . . . . .. 112 112. 113 113 114 114. 115 116. 117 117. 118. 141 142 143 144 145 146 147 148 149.
(14) A.10.Interfaz Autómatica, muestra la detección de castañas sin defecto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150 A.11.Interfaz Autómatica, muestra la detección de castañas sin defecto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151 B.1. OpenCV, framework de procesamiento de imágenes (Fuente: http://opencv.org/) . . 152 B.2. IDE Qt Creator, diseño de interfaz de usuario (Fuente: http://qt.nokia.com/products/)153.
(15) Índice de tablas. 3.1. Categorías de clasificación de la Castaña con Cáscara (Fuente: [Brasil_Nuts, 2016, FAO, 2016]) 17 3.2. Categoría de clasificación de la Castaña sin Cáscara – Primera Categoría (Fuente: [Brasil_Nuts, 2016, FAO, 2016]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.3. Tabla de Defectos Visuales en la Castaña (Fuente: Elaboración Propia) . . . . . . . . . . 18 3.4. Características y Aplicaciones de los Espacios de Color (Fuente: Elaboración Propia) . . 27 3.5. Muestra los Espacios de Color con sus respectivos Canales (Fuente: Elaboración Propia) 28 3.6. Valores de umbrales establecidos (0, 82, 154, 180 y 255) y el valor de umbral máximo de 255. (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 3.7. Muestra la multi-Umbralización con un valor mínimo y un máximo (Tmin y Tmax ) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 4.1. Recorrido del algoritmo Detectar Defecto (Alg. 2 y 3) aplicado a la Región Oscura del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2. Detecta Defectos en la Región Oscura del Objeto (Fuente: Elaboración Propia) . . . . . 4.3. Detecta Defectos en la Región Clara del Objeto (Fuente: Elaboración Propia) . . . . . . 4.4. Búsqueda del Espacio de Color (X) y su respectivo Canal (Xi ) - Inspección Visual (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5. Muestra la presencia de defectos a través del Alg. de Descriptor de Primer Orden (Alg. 5) en la Región Oscura del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . 4.6. Muestra la presencia de defectos a través del Alg. de Descriptor de Primer Orden (Alg. 5) en la Región Clara del Objeto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . 4.7. Representación de la Desviación Estándar (Fuente: Elaboración Propia) . . . . . . . . . 4.8. Clasificación del Objeto por Tipo de Defecto Visual que presenta (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1. La Base de Datos consta de Imágenes de Entrenamiento e Imágenes sin Entrenamiento (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2. Presencia de Castaña en cada Línea de Producción (Fuente: Elaboración Propia) . . . . . 5.3. División de la Castaña en dos regiones (Epidermis y Pulpa), en función de los umbrales presentados (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 5.4. Divide la Castaña en dos Regiones (Epidermis y Pulpa) (Fuente: Elaboración Propia) . . 5.5. Detecta Defectos en la Región de la Epidermis de la Castaña (Fuente: Elaboración Propia) 5.6. Muestra la presencia de defectos a través del Alg. de Descriptor de Primer Orden (Alg. 5) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.7. Detecta Defectos en la Región de la Pulpa de la Castaña (Fuente: Elaboración Propia) . . 5.8. Muestra la presencia de defectos a través del Alg. de Descriptor de Primer Orden (Alg. 5) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.9. Muestra la presencia o ausencia de defectos en cada Región (Epidermis o Pulpa) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XII. 51 53 54 55 59 60 62 64. 66 67 70 71 74 75 77 78 79.
(16) 5.10. Detección de defectos “Ojos”, búsqueda del Espacio y Canal (Fuente: Elaboración Propia) 81 5.11. Detección de defectos “Ojos”, búsqueda de la Umbralización y Descarte por Áreas (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 5.12. Ejemplos de Castañas con Defecto Visual “Ojos” (Fuente: Elaboración Propia) . . . . . 84 5.13. Detección de defectos “Cáscara”, a través del algoritmo Detectar Defecto (Alg. 2 y 3) que utiliza el descriptor de Primer Orden (Alg. 5) (Fuente: Elaboración Propia) . . . . . 85 5.14. Ejemplos de Castañas con Defecto Visual “Cáscara” (Fuente: Elaboración Propia) . . . . 86 5.15. Detección de defectos “Manchada”, búsqueda del Espacio y Canal (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87 5.16. Detección de defectos “Manchada”, búsqueda de la Umbralización y Descarte por Áreas (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88 5.17. Ejemplos de Castañas con Defecto Visual “Manchada” (Fuente: Elaboración Propia) . . 90 5.18. Detección de defectos “Rancias”, búsqueda del Espacio y Canal (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91 5.19. Detección de defectos “Rancia”, búsqueda de la Umbralización y Descarte por Áreas (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92 5.20. Ejemplos de Castañas con Defecto Visual “Rancia” (Fuente: Elaboración Propia) . . . . 93 5.21. Detección de defectos “Desportillada”, búsqueda del Espacio y Canal (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 5.22. Detección de defectos “Desportillada”, búsqueda de la Umbralización y Descarte por Áreas (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95 5.23. Ejemplos de Castañas con Defecto Visual “Desportillada” (Fuente: Elaboración Propia) . 96 5.24. Parámetros para detectar defectos en las regiones a través del algoritmo Detectar Defecto (Alg. 2 y 3) que utiliza el Descriptor de Primer Orden (Alg. 5) (Fuente: Elaboración Propia) 96 5.25. Parámetros para la detección de Defectos por Color y Tamaño, a través del algoritmo de Segmentación por Color y Tamaño (Alg. 4) (Fuente: Elaboración Propia) . . . . . . . . 97 5.26. Clasificación por Tipo de Defecto Visual en Castañas (Fuente: [Proy.PIPEA_134, 2013]) 99 5.27. Tabla de Contingencia (Fuente: [Fawcett, 2006]) . . . . . . . . . . . . . . . . . . . . . . 99 5.28. La Base de Datos consta de Imágenes de Entrenamiento e Imágenes sin Entrenamiento (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 5.29. Espacio ROC, compara los resultados del Algoritmo Propuesto con el Algoritmo del Proyecto [Proy.PIPEA_134, 2013], sobre el 40 % de la base de datos (Imágenes de Entrenamiento) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 102 5.30. Medidas de sensibilidad (VPR), especificidad (SPC), exactitud (ACC) y coeficiente de correlación de Matthews (CC), sobre el 40 % de la base de datos (Imágenes de Entrenamiento) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . 103 5.31. Medida de Exactitud (ACC), Algoritmo del Proyecto [Proy.PIPEA_134, 2013] frente al Algoritmo Propuesto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . 104 5.32. Medida por Coeficiente de Correlación de Matthews (CC), Algoritmo del Proyecto [Proy.PIPEA_134, 2013] frente al Algoritmo Propuesto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 104 5.33. Resultados en Imágenes de Entrenamiento (40 % de la Base de Datos) . . . . . . . . . . 104 5.34. Espacio ROC, compara los resultados del Algoritmo Propuesto con el Algoritmo del Proyecto [Proy.PIPEA_134, 2013], sobre el 60 % de la base de datos (Imágenes sin Entrenamiento) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 105 5.35. Medidas de sensibilidad (VPR), especificidad (SPC), exactitud (ACC) y coeficiente de correlación de Matthews (CC), sobre el 60 % de la base de datos (Imágenes sin Entrenamiento) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . 106.
(17) 5.36. Medida de Exactitud (ACC), Algoritmo del Proyecto [Proy.PIPEA_134, 2013] frente al Algoritmo Propuesto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . 107 5.37. Medida por Coeficiente de Correlación de Matthews (CC), Algoritmo del Proyecto [Proy.PIPEA_134, 2013] frente al Algoritmo Propuesto (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . 107 5.38. Resultados en Imágenes sin Entrenamiento (60 % de la Base de Datos) . . . . . . . . . . 107 5.39. Tiempo de Procesamiento (ms) del alg. del Proyecto como del alg. Propuesto aplicado a 180 imágenes (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . 108 5.40. Productividad (kg.) por Línea de Producción (Fuente: Elaboración Propia) . . . . . . . . 110 5.41. Productividad (kg.) de una Línea de Producción (Fuente: Elaboración Propia) . . . . . . 110 5.42. Descripción de la Interfaz de Espacios de Color con sus respectivos Canales (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116 5.43. Descripción de la Interfaz de Umbralización y sus tipos de umbralización (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116 A.1. Base de Datos - Castañas sin Defectos en “Pulpa” y en “Epidermis” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128 A.2. Base de Datos - Castañas sin Defectos en “Epidermis-Pulpa” (Fuente: Elaboración Propia)129 A.3. Base de Datos - Castañas con Defecto Visual “Cáscaras Claras” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131 A.4. Base de Datos - Castañas con Defecto Visual “Cáscaras Oscuras” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132 A.5. Base de Datos - Castañas con Defecto Visual “Ojos Oscuros” (Fuente: Elaboración Propia)133 A.6. Base de Datos - Castañas con Defecto Visual “Ojos Claros” (Fuente: Elaboración Propia) 134 A.7. Base de Datos - Castañas con Defecto Visual “Manchadas, manchas Amarillentas con Anaranjado” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . 135 A.8. Base de Datos - Castañas con Defecto Visual “Manchadas, manchas Amarillentas Oscuras” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136 A.9. Base de Datos - Castañas con Defecto Visual “Rancias” (Fuente: Elaboración Propia) . . 137 A.10.Base de Datos - Castañas con Defecto Visual “Desportilladas” (Fuente: Elaboración Propia)139 D.1. Base de datos de Tejidos en Lana de Alpaca . . . . . . . . . . . . . . . . . . . . . . . . D.2. Parámetros para detectar defectos en la Región a través del algoritmo Detectar Defecto (Alg. 2 y 3) (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . D.3. Estadisticas de la Detección de Defectos en la base de datos de Tejidos en Lana de Alpaca (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D.4. Base de Datos de Tejidos en Lana de Alpaca - Defecto “Aguja Rota” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D.5. Base de Datos de Tejidos en Lana de Alpaca - Defecto “Hueco” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D.6. Base de Datos de Tejidos en Lana de Alpaca - Defecto “Nudo” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D.7. Base de Datos de Tejidos en Lana de Alpaca - Defecto “Punto Corrido” (Fuente: Elaboración Propia) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 156 156 157 157 159 160 161.
(18) Capítulo 1. Introducción. 1.1.. Planteamiento del Problema. En el campo de la agroindustria, muchos investigadores han intentado resolver el proceso de control de calidad que incluye el estado de maduración, detección e identificación de defectos y la clasificación en base al tamaño o color; basándose en las características externas del fruto como el color, tamaño, textura, forma o peso, para ser utilizado en el análisis de imágenes y la visión artificial [Qureshi et al., 2014, Ganiron, 2014, Narendra and Hareesh, 2014, Ripas-Mamani et al., 2016]. Por ejemplo, la empresa Compac Sorting Equipment [Compac, 2016] dispone de máquinas de clasificación de manzanas, duraznos, peras, etc; estas se clasifican en base a su peso, tamaño y la detección de defectos; al igual que la empresa Vision Robotics Corporation (VRC) [VRC, 2016] que tiene un robot con visión artificial para la preparación del cultivo de viñedo; sin embargo estas máquinas no da detalles de cómo se obtiene la información, ya que sólo muestran los resultados. El problema se hace más difícil cuando hay que determinar ciertas enfermedades o defectos en el producto, como hongos, manchas y gusanos en las frutas, imperfecciones y agujeros en las patatas, mangos o castañas, entre otros. Ganiron [Ganiron, 2014] determina la calidad del mango (exportación, local o rechazado) a través de la detección de defectos que obtiene en base al tamaño, perímetro, redondez y porcentaje de defectos encontrados en el mango; otra manera de detectar defectos lo muestra Guzmán [Guzmán, 2015] en el mejoramiento de imágenes digitales para la clasificación de defectos de granos de Café, a través del algoritmo basado en la teoría de Retinex multiescala con restauración de color (MSRCR) que mejora subjetivamente la visualización de imágenes con iluminación deficiente conservando las características de color y para clasificar los defectos utiliza descriptores de color y textura para las matrices de coocurrencia de color (CGLCM) que presenta las características relacionadas: al contraste (contraste), orden (energía) y la estadística descriptiva o también llamado descriptor de primer orden (correlación), junto con support vector machine (SVM); al mejorar la imagen la clasificación de defectos de café obtiene un 78.15 % frente a un 70.92 % sin pre-procesamiento; también se encuentra la detección de defectos visuales en castañas [Proy.PIPEA_134, 2013] aplicada en la base de datos cuyos defectos son cáscara, ojos, manchadas, rancias y desportillas, en el que se utilizó descriptor de color y tamaño para la identificación de los defectos mediante la segmentación por espacios de color (RGB, HSV, HLS, YCrCb, Lab, Luv y XYZ) y una umbralización multiumbral presentando una eficiencia de 91.8 %. Por otro lado Mayhua [Mayhua, 2015] utiliza descriptores de forma para la clasificación automática de defectos en la producción de tejidos en Lana de Alpaca de tipo punto (aguja rota, hueco, nudo y punto corrido) donde extrae las características de forma como: número de regiones defectuosas, relación entre el largo del defecto y el tamaño de la imagen, excentricidad, circularidad y solidez; estas características son las entradas que utiliza la red neuronal ARTMAP difusa donde el método de aprendizaje realizado es off-line, por lo que después de la fase de entrenamiento los pesos de la red neuronal quedaran fijos para. 1.
(19) CAPÍTULO 1: INTRODUCCIÓN. 2. la etapa de prueba, obteniendo un 92.77 % en la clasificación de defectos de tejidos en lana de alpaca de tipo punto. Tanto los trabajos de clasificación de defectos de granos de Café Verde [Guzmán, 2015] y de Tejidos en Lana de Alpaca [Mayhua, 2015] no distinguen la presencia o ausencia del defecto, ya que ellos trabajan con imágenes que presentan defectos y solo se realiza la identificación o clasificación; a diferencia de ellos la detección de defectos en castañas [Proy.PIPEA_134, 2013] identifica todos los defectos que puede presentar una castaña, en caso que no presente ningún defecto entonces lo clasifica como una castaña sin defectos. Por lo tanto, la propuesta presentada en esta tesis se enfoca en la detección e identificación de los defectos visuales en un objeto, implementado en la detección de defectos visuales en castañas mediante los descriptores de color, tamaño y textura aplicado a la base de datos del proyecto [Proy.PIPEA_134, 2013], donde los productos de exportación deben ser productos sin defectos (productos comerciales de primera calidad) y los que tienen defectos pueden ser comercializados después de un procedimiento específico, esos defectos pueden ser: ojos (son eliminados para obtener productos comercializables de segunda calidad), cáscara (son re-procesadas después de la eliminación de la cáscara), desportilladas (productos comercializables de tercera calidad) y rancias-manchadas (son descartadas del consumo humano).. 1.2.. Definición del Problema. En el 2013 se realizó un estudio previo presentado por el proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas” [Proy.PIPEA_134, 2013], donde una de sus actividades fue la detección de defectos visuales en castañas, estos defectos son: cáscara, ojos, manchadas, rancias y desportilladas. Al ejecutar el algoritmo del proyecto [Proy.PIPEA_134, 2013] en la base de datos, se encontró: Deficiencias en la identificación de los defectos de ojos claros, cáscaras y manchadas, debido a que se confunde con el color que presenta la epidermis de la castaña que va entre un café claro a un café oscuro; también se encontró deficiencia en la detección de la castaña sin defectos ya que necesita identificar todos los defectos para clasificarla como una castaña sin defectos.. 1.3.. Justificación. El desarrollo de la presente tesis busca brindar nuevos conocimientos en el uso de técnicas de descriptores de color, tamaño y textura que se muestran muy eficientes para mejorar la detección e identificación de los defectos en la castaña; ya que el color determina si la castaña se encuentra en buen estado o presenta defectos, tamaño determina si las regiones o áreas de los defectos pasan o no la tolerancia de calidad y textura debido a que algunos defectos puede presentar una textura lisa o rugosa. Por lo tanto, se utilizara el descriptor de primer orden de textura para determinar la presencia o ausencia de defectos, para contrarrestar las deficiencias en la identificación de los defectos de ojos claros, cáscara y manchada se divide la castaña en dos regiones (epidermis y pulpa) debido a los colores similares que presentan los defectos con la epidermis de la castaña y finalmente para identificar los defectos se utiliza los descriptores de color, tamaño y textura.. 1.4.. Delimitaciones La investigación está delimitada a los diferentes defectos como cáscaras, ojos, manchadas, rancias y desportillada que menciona las normas de Food and Drug Administration (FAO) [Flores, 2002,.
(20) CAPÍTULO 1: INTRODUCCIÓN. 3. CODEX, 2015, FAO, 2016]. La presente tesis analiza las imágenes de la base de datos del proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas” [Proy.PIPEA_134, 2013], la cual consta de 1451 imágenes, divididas en castañas sin defectos (258 imágenes) y castañas con defectos como: Cáscara (200 imágenes), ojos (250 imágenes), manchadas (303 imágenes), rancias (200 imágenes) y desportilladas (240 imágenes). Las imágenes de la Base de Datos constan de dos Líneas de Producción, en cada una de las Líneas debe estar presente una castaña, en caso contrario la ausencia de castaña. En caso de tener varias castañas en la línea de producción se realizara una segmentación por descriptor de forma elíptica que presenta la castaña y a partir de ello se identificaran sus defectos; sin embargo, no es bueno tener varias castañas en una líneas de producción, ya que se realiza una inspección individual y posteriormente se envía a la bandeja del defecto identificado, al tener varias castañas al momento de enviarlas a las bandejas de defectos, estos van a caer en el primer defecto que se identificó debido a que no tiene un espacio entre ellas para poder redirigir dichos defectos; es por ello que en una imagen si tendría buenos resultados, pero en tiempo real no sería bueno ya que esto propiciaría errores y lo que se busca es una inspección del 100 % de la producción y así minimizar el envío de productos defectuosos. El algoritmo propuesto detectara la presencia o ausencia del defecto en castañas de la base de datos utilizada, en caso de presentar defecto entonces identificara dicho defecto. El algoritmo propuesto no presenta pruebas en tiempo real.. 1.5.. Objetivos. 1.5.1.. Objetivo General. Mejorar la detección automática de defectos visuales en Castañas mediante el mejoramiento del proceso de detección de defectos.. 1.5.2.. Objetivos Específicos. Para lograr el mejoramiento del proceso de detección de defectos en castañas, es necesario que se logren resolver los siguientes problemas: Solucionar las deficiencias presentadas en la identificación de defectos de ojos claros, cáscara y manchadas Determinar si la castaña presenta defectos sin realizar la identificación de todos los defectos. Realizar el mejoramiento de la identificación de defectos visuales a través de las características externas de cada defecto mediante técnicas de descriptores de color, tamaño y textura. Implementar algoritmos para detectar e identificar defectos. Determinar de forma automática el tipo de defecto que presenta..
(21) CAPÍTULO 1: INTRODUCCIÓN. 1.6.. 4. Hipótesis de la Investigación. Es posible mejorar el proceso de detección de defectos visuales en castañas, a través de imágenes digitales empleando descriptores de color, tamaño y textura como técnica.. 1.7.. Variables e Indicadores. 1.7.1.. Variable Independiente Imagen de entrada de la base de datos Tiempo de procesamiento. 1.7.2.. Variable Dependiente Resultado de la detección e identificación del algoritmo propuesto Productividad. 1.8.. Indicadores de Validez. La presente tesis va a detectar e identificar los defectos visuales en castañas de una imagen digital, para lo cual es necesario el empleo de indicadores de validez para sustentar el objetivo propuesto. Para evaluar el resultado de la detección e identificación de defectos visuales en castañas se empleó las medidas de Exactitud (ACC) y el Coeficiente de Correlación de Matthews (CC). Estos indicadores están definidos en el capítulo 5.3 donde se detalla su aplicación.. 1.9.. Cobertura de Estudio. 1.9.1.. Universo. Estudio del proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas” [Proy.PIPEA_134, 2013], Contrato PIPEA-134-2010, ejecutado por la Universidad Nacional de San Agustín y la Empresa El Bosque E.I.R.L; Cátedra CONCYTEC en TIC‘s – UNSA (2010-2013).. 1.9.2.. Muestra. La presente tesis va a trabajar con la base de datos del proyecto “Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas” [Proy.PIPEA_134, 2013], donde al ejecutar el algoritmo del proyecto en la base de datos se obtuvo 91.79 % de eficiencia y un tiempo de procesamiento de 43 milisegundos para la detección de defectos visuales en la castaña.. 1.10.. Viabilidad de la investigación. 1.10.1.. Viabilidad Técnica. Los beneficios que se obtiene al desarrollar la presente tesis son:.
(22) CAPÍTULO 1: INTRODUCCIÓN. 5. Utilización de herramientas de software libre, como openCV y C++ para el procesamiento de imágenes, QtCreator como IDE para el diseño de la interfaz de usuario. Detección de la presencia o ausencia de defectos cuando el objeto presenta textura. Detección de objetos o defectos de acuerdo al color que presenta.. 1.10.2.. Viabilidad Económica. El costo de utilizar software libre es menor que el costo de utilizar un software comercial, como es el caso de licencias de openCV, C++, QtCreator. Para el desarrollo de la tesis se utilizó herramientas de software libre y el código del algoritmo propuesto podrá ser de código abierto, todo ello permitirá un costo menor en comparación con el software comercial. En cuanto al tiempo de procesamiento, el algoritmo del proyecto demora 43 ms en procesar una imagen de la castaña; sin embargo, al utilizar el algoritmo propuesto podrá realizarlo en 25 ms en el peor y 17 ms en el mejor de los casos; por lo tanto, al tener un menor tiempo de procesamiento permitirá aumentar su productividad. En el futuro el algoritmo propuesto podrá ser implementado en tiempo real.. 1.11.. Tipo y Nivel de Investigación. 1.11.1.. Tipo de Investigación. El tipo de investigación es APLICADA ya que esta tesis está orientado a resolver un problema determinado a través de la propuesta que refleje el aspecto teórico en una aplicación.. 1.11.2.. Nivel de Investigación. El nivel de investigación es EXPLORATORIA ya que se investigará diferentes técnicas para identificar los defectos que presentan los frutos secos como castañas y los resultados que se obtenga en esta tesis será un aporte para trabajos similares.. 1.12.. Método y Diseño de la Investigación. 1.12.1.. Método de la Investigación. Para el desarrollo de esta tesis, los métodos de investigación que se va utilizar son: Observación: Identifica las partes que caracterizan la solución del problema como la identificación de las características visuales en la castaña para la detección de defectos, identificación de los descriptores que se van a utilizar, técnicas para el procesamiento de imágenes y el tiempo de procesamiento..
(23) CAPÍTULO 1: INTRODUCCIÓN. 6. Análisis: Identifica los elementos que influyen en la eficiencia de la detección de defectos en la castaña y la forma de clasificación implantada por normas de Food and Drug Administration (FAO). Experimentación científica para formular las condiciones adecuadas para el desarrollo de la presente tesis.. 1.12.2.. Diseño de la Investigación. El diseño de la investigación planteado para esta tesis es de tipo EXPERIMENTAL, ya que de la imagen de entrada de la base de datos (variable independiente) se observaran las características externas para la detección de defectos en la castaña; donde habrá una implementación de técnicas de procesamiento necesario para cumplir el objetivo, además del control y validez para determinar si identifico o no los defectos en la castaña (variable dependiente), adicional a ello presenta un menor tiempo de procesamiento de cada imagen (variable independiente) generando un incremento en la productividad (variable dependiente).. 1.13.. Técnicas e Instrumentos de Recolección de Información. 1.13.1.. Técnicas. Observación: Observando las características externas para determinar si la castaña presenta o no defectos e identificar los defectos que presenta. Entrevista: Con las personas que estuvieron a cargo del proyecto "Desarrollo de componentes mecatrónicos basados en visión artificial inteligente para la optimización del proceso de selección de castañas"[Proy.PIPEA_134, 2013]. Lectura: Obtener información a través de la lectura de libros, revistas científicas, papers, tesis, páginas web académicas, etc. que conforman el estado de arte de la presente tesis.. 1.13.2.. Instrumentos. Base de datos del proyecto [Proy.PIPEA_134, 2013]. Laptop utilizada para realizar las pruebas..
(24) Recolección de información Selección del Tema de Investigación Revisión del Estado del Arte Redacción del Plan de Tesis Revisión de Técnicas de Procesamiento de Imágenes para la tesis planteada Redacción de la Tesis Desarrollar la propuesta en base a las técnicas de procesamiento de imágenes que se van a realizar Implementar la propuesta al Mejoramiento del Proceso de Detección de Defectos visuales en Castañas Realización de pruebas Corrección del borrador de Tesis por la Asesora Conclusiones Presentación. Actividades. X. X. May. 2016 X. X X. Jun. 2016. X X X. X X. Ago. 2016. X. X. Jul. 2016. X. X. X X X. X X X X. X X. X. X. Ene. 2017. Cronograma. X. X. Dic. 2016. 1.14.1.. X. X. Nov. 2016. Cronograma y Presupuesto. X. X. Oct. 2016. 1.14.. X. X. Meses Sep. 2016. CAPÍTULO 1: INTRODUCCIÓN 7.
(25) CAPÍTULO 1: INTRODUCCIÓN. 1.14.2.. 8. Presupuesto. CONCEPTOS. I. MATERIALES Copias fotostáticas generales Tinta para impresora (cartuchos) para Impresiones generales Papel Bond Lapiceros Resaltador USB. II. MATERIALES PARA SOFTWARE Base de Datos a Laptop b Material bibliográfico c Herramientas de Software Libre d Horas-hombre (investigador y programador) e. CANTIDAD. UNIDAD. PRECIO. (MESES). (MESES). UNITARIO. COSTO TAL S/.. 250. Unidad. 0.1. 25.00. 4. Unidad. 50. 200.00. 2.5 4 5 1. Millar Unidad Unidad Unidad. 40 3.5 3 40. 100.00 14.00 15.00 40.00 394.00. — — —. Unidad Unidad Unidad. 0.00 0.00 0.0. 0.00 0.00 0.00. —. Unidad. 0.00. 0.00. may-ago (5h/d) sep-dic (8h/d). Unidad. 0.00. 0.00. TO-. 0.00 III. SERVICIOS Servicio de Internet. 9. Meses. 70. 630.00. IV. VIÁTICOS Transporte Otros gastos adicionales. 9 9. Meses Meses. 60 90. 540.00 810.00 1350.00 2374.00. TOTAL a Fue. brindado por la asesora Dra. Raquel Patiño Escarcina, quien estuvo a cargo del proyecto [Proy.PIPEA_134, 2013]. laptop propiedad de la alumna. c Consta de libros, papers y tesis; fueron obtenidos en la web sin costo alguno, a través de scopus http://www.scopus.com o http://sci-hub.bz/ (agregando DOI). d Como openCV y C++ para el procesamiento de imágenes y QtCreator como IDE para el diseño de la interfaz de usuario. e El costo es de 0.00 ya que el código del algoritmo propuesto podrá ser de Código Abierto, todo ello permitirá un costo menor en comparación con el software comercial. b Una. 1.15.. Organización de la tesis. El trabajo está organizado en 6 capítulos, incluyendo la presente introducción y teniendo la siguiente estructura. En el capítulo 2 se describe una revisión de trabajos previos realizados en el área donde muestra diversos aplicativos de análisis de imágenes. En el capítulo 3 se describe los principales conceptos relacionados en la presente tesis..
(26) CAPÍTULO 1: INTRODUCCIÓN. 9. En el capítulo 4 se presenta la propuesta de la tesis. En el capítulo 5 se presenta la implementación de la propuesta y las pruebas de validación del método propuesto. En el capítulo 6 serán desarrolladas las conclusiones y trabajos futuros..
(27) Capítulo 2. Estado de Arte. 2.0.1.. Automatización del Proceso de Selección. Hoy en día, una importante actividad económica de la selva del Perú 1 , Bolivia y Brasil 2 es la producción y comercialización de castañas y otros tipos de frutos secos, antes del proceso de exportación es necesario realizar un conjunto de operaciones de selección, lo que comúnmente es un proceso manual, ocasionando que la clasificación sea costosa, lenta e imprecisa. Sin embargo, hay empresas que se dedican a desarrollar tecnologías en el campo de la Agro-industria para el control de calidad, selección o clasificación y detección de defectos o enfermedades basándose en las características externas del objeto o producto como color, forma, tamaño, textura o peso; todos ellos con visión artificial a través del procesamiento digital de imágenes [Ohali, 2011, Blasco et al., 2009, Rashidi, 2007, Mery et al., 2009]. Algunas de las empresa como Compac Sorting Equipment [Compac, 2016] tiene máquinas clasificadoras de manzanas, duraznos, peras, las cuales son clasificados por peso, tamaño y detección de defecto; la empresa Vision Robotics Corporation (VRC) [VRC, 2016] muestra un robot para la preparación del cultivo de viñeros donde se especializa en el corte preciso y limpio de las uvas, y la empresa Tillett and Hague Technology [Tillett and Technology, 2016] cuenta con un tractor robotizado aplicado en la selección de los productos químicos para un cultivo de coliflor, también es utilizado en el control de una serie de cultivos de hortaliza y el control integrado para la eliminación de maleza y la producción orgánica del repollo. Al igual que las empresas, algunas universidades han desarrollado tecnologías como la Universidad de Agricultura y Tecnología en Tokio ha inventado un traje-robot llamado FarmBot diseñado para ayudar en la plantación y el cultivo de la tierra [Universidad, 2016b], la universidad de Okasuma [Universidad, 2016a] muestra su robot recolector de fresas, tomates y cerezas a través de un brazo manipulador de 7 grados de libertad junto con un sistema de visión; también García y Vásquez [García and Vásquez, 2010, Balaguer et al., 2007] muestran trabajos de robotización de las tareas agrícolas como sembrar, regar, cortar, cosechar, etc. a través de los sistemas de visión que presentan los robots como identificar surcos, planta y maleza; para cosechar/recolectar el robot tiene que presentar un brazo robótico donde el sistema de visión detectara el color o forma del fruto para determinar su posición. Sin embargo, las empresas no dan detalle del tipo de tecnología que utiliza para la construcción de la máquina automatizada o robot ni la información de la detección o clasificación, ya que suele ser cerrada y costosa; es por ello que Álvarez-Valera [Álvarez-Valera, 2015] presenta un estudio de métodos de planificación de procesos y algunos dispositivos de procesamiento para controlar máquinas de automatización industrial a partir de un ordenador personal; dicha propuesta fue implementa en la máquina de automatización industrial del proceso de selección de castañas a través de una arquitectura de 3 módulos, el módulo Mecánico que es la parte física de la máquina, Electrónico realiza la transferencia de datos 1 http://www.promamazonia.org.pe/ 2 http://www.ccbolgroup.com/brasilnuts.html. 10.
Figure

+7





Outline
Documento similar