DESENVOLVIMENTO DE UM SISTEMA PARA REALIZAÇÃO DE LEVANTAMENTOS BATIMÉTRICOS AUTOMATIZADOS
5
0
0
Texto completo
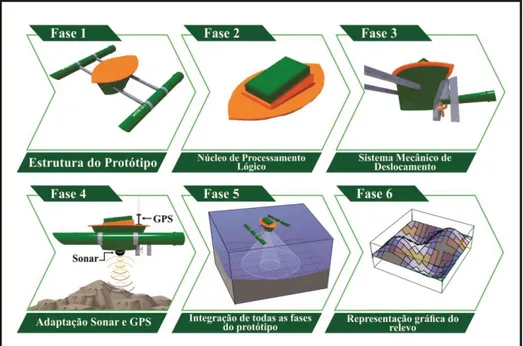
(2) DESENVOLVIMENTO DE UM SISTEMA PARA REALIZAÇÃO DE LEVANTAMENTOS BATIMÉTRICOS AUTOMATIZADOS 1. INTRODUÇÃO Batimetria é a ciência utilizada a fim de determinar e representar graficamente o relevo do fundo de áreas submersas, tais como mares, lagos e rios. Em seguida, a representação é feita cartograficamente por meio de curvas batimétricas as quais unem pontos de profundidade semelhantes, correlacionadas com curvas topográficas que unem pontos de mesma altitude (PEREIRA, 2008). Segundo Pereira (2008), o ecobatímentro é o instrumento para realização dos levantamentos batimétricos, que emite ondas sonoras para fazer a medição de profundidades. Esse fenômeno ocorre devido ao intervalo de tempo de emissão e recepção dessas ondas, com auxílio de um relógio interno que mensura estes instantes. Existem dois modelos de ecobatímetros: mono-feixe ou multi-feixe. Na batimetria mono-feixe, utiliza-se apenas uma faixa sonora e é emitida em um determinado instante, diferente da batimetria multi-feixe que utiliza diversas faixas sonoras simultaneamente, possibilitando mapeamento abrangente de áreas em alta resolução. Utilizando a batimetria, Frazão (2016) aplicou a metodologia de cálculos geoestatísticos com a finalidade de analisar os dados obtidos do levantamento batimétrico. Para isso, fez uso de Sistemas de Informações Geográficas (SIG) aliados a técnicas de sensoriamento remoto com a finalidade de resultar em imagens integradas ao SIG. Conforme Pereira (2008) aumentaram os estudos das áreas hidrográficas devido à sua contínua ocupação. Esta utilização é por meio das intervenções humanas através de construções de portos, pontes, barragens, dutos submarinos, túneis, entre outros. Porém, o limitante do levantamento batimétrico está no seu processo, o qual é extremamente oneroso. Essa restrição ocorre devido à necessidade de equipamentos específicos e de profissionais especializados a fim de elaborar ensaios geofísicos VREUH D OkPLQD G¶iJXD H UHSUHVHQWDU DV SURIXQGLGDGHV graficamente (DE SANTANA, 2011). Neste sentido, o objetivo do presente trabalho é desenvolver um protótipo automatizado e de baixo custo com a finalidade de realizar o levantamento batimétrico. Em seguida, gerar gráficos tridimensionais do relevo de áreas submersas, utilizando um sonar (Sound Navigation And Ranging) para obtenção de valores de profundidade e um sistema de localização por GPS (Global Positioning System) responsável por seu posicionamento. 2. METODOLOGIA O desenvolvimento do protótipo ocorre em seis fases. A Figura 1 apresenta a metodologia de desenvolvimento..
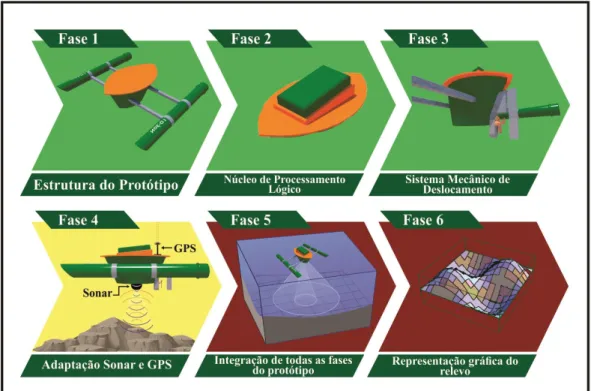
(3) Figura 1. Fases de desenvolvimento do protótipo. Cada uma destas etapas apresenta componentes próprios e funções específicas: Fase 1 ± Estrutura do protótipo. Fase de construção da estrutura do protótipo, promovendo a sua estabilidade sobre o reservatório de água e acoplagem dos sistemas inteligentes para processamento, deslocamento e obtenção de dados. Fase 2 ± Núcleo de processamento lógico. Nesta Fase os componentes mecânicos de velocidade e direção são controlados em conjunto com os dispositivos de leitura de profundidade e posicionamento. Fase 3 ± Sistema mecânico de deslocamento. Sistema construído para deslocar o protótipo sobre o reservatório. Fase 4 ± Adaptação Sonar e GPS. Adapta os valores de profundidade obtidos pelo sonar e o posicionamento através do GPS com o núcleo de processamento lógico. Fase 5 ± Integração de todas as fases do sistema. Integra todas as fases do protótipo, onde o núcleo de processamento lógico armazena os dados emitidos pelo Sonar e GPS e controla o sistema mecânico de deslocamento. Fase 6 ± Representação gráfica do revelo. Fase de obtenção e aplicação dos dados obtidos e armazenados pelo protótipo. 3. RESULTADOS e DISCUSSÃO A Figura 2 apresenta o estado atual de cada fase do protótipo representado por cores. As fases com fundo em verde estão finalizadas. A fase com fundo em amarelo está em desenvolvimento e as fases em vermelho ainda não iniciaram..
(4) Figura 2. Estado atual de cada fase do protótipo A Fase 1 do sistema, referente à construção do protótipo, se encontra construída, onde a estrutura do protótipo é constituída por um polímero resistente com fibra de vidro, o qual foi modelado em chapas de zinco. Como estabilizadores, construiu-se um par de tubos com o material de Policlorieteno, conhecido por PVC, para nivelar e estabilizar o protótipo em água. Hastes de alumínio com braçadeiras fixam os estabilizadores na estrutura. Posteriormente na fase 2, o núcleo de processamento lógico está desenvolvido e é composto por um microcontrolador Arduino Mega 2560, em conjunto com um módulo SD (Secure Digital Card), responsável por armazenar os dados de profundidade obtidos pelo Sonar e de posicionamento do GPS. A Fase 3 do sistema é responsável pelo deslocamento do protótipo sobre a superfície submersa, a etapa se encontra construída e possui um motor brushless inrunner com sistema de resfriamento a água, um ESC (Eletronic Speed Control) ± controlador eletrônico de velocidade - que controla a velocidade do motor.acoplado a um eixo e um propelente. Além disso, há um leme movimentador responsável pela direção do deslocamento. A Fase 4 do sistema se encontra em desenvolvimento, caracterizado pela adaptação do Sonar e GPS ao protótipo. Um GPS Module Ublox M8n está sendo utilizado para obtenção de coordenadas conhecidas de latitude e longitude. Atualmente, estão sendo realizados testes de calibração com um Sonar Fish Finder, para obter valores de profundidade. As Fases 5 e 6 do sistema ainda não se encontram em desenvolvimento, devido a não conclusão da Fase 4, a integração de todas as fases do sistema e a representação gráfica do relevo não podem ser definidas. Até o momento, teve-se apenas breve estudo teórico destas fases. 4. CONSIDERAÇÕES FINAIS Atualmente, para realizar levantamentos batimétricos são necessários três ou mais profissionais, o que resulta em um trabalho oneroso, além de utilizar várias ferramentas que possuem elevados custos monetários. Visto isso, o presente.
(5) trabalho apresentou a criação de um protótipo para realizar levantamento batimétrico de forma autônoma. A ideia do protótipo é mensurar a profundidade de qualquer tipo de áreas submersas, podendo ser aprimorado ao longo de testes, visando facilitar ainda mais as práticas em levantamentos batimétricos. O sistema é composto por 6 fases, onde, atualmente, as fases referentes a construção da estrutura, construção do núcleo controlador e do sistema de deslocamento se encontram finalizadas. Está em desenvolvimento a fase referente à adaptação do GPS e Sonar, onde após ser concluída, a integração de todas as Fases do sistema e representação do relevo serão definidas. Como trabalhos futuros, sugerem-se como uma extensão do projeto, cálculos de volumes de áreas, alteração do mecanismo de deslocamento para analisar a eficiência energética e modelagem do relevo em áreas de rios, mares, lagos e barragens. 5. REFERÊNCIAS ARDUINO. Página Oficial [internet]. [acesso em 25 set 2017]. Disponível em: https://store.arduino.cc/usa/arduino-mega-2560-rev3. DE SANTANA, G. C.; LIMA, R. Robô Batimétrico. 79f. 2011. Monografia (Graduação em Ciência da Computação), Núcleo de Ciências Exatas e Tecnológicas, Universidade Positivo, Curitiba, 2011. FRAZÃO, L. S. & AMARO, V. E. Caracterização Batimétrica e Físico-Oceanográfica do Porto de Cabedelo/PB, Brasil: Uma Análise Ambiental ao Derrame de Óleo. Revista Brasileira de Geomorfologia. v. 17, p. 125-143, 2016. PEREIRA, J. P. G., BARACHUY, J.G. de V. Ecobatimetria: Teoria e Prática. Campina Grande, Gráfica Agenda, 2008. 84p. UBLOX. Página Oficial [internet]. [acesso em 25 set 2017]. Disponível em: https://www.u-blox.com/en..
(6)
Figure
Documento similar
A primeira constatação é a de que havia um dentro e um fora da sala de aula e que em ambos os lugares o professor encontrava-se rodeado por artefatos. Uma das professoras filmou
Em um primeiro momento foi avaliado o uso de glicerol bruto proveniente da produção de biodiesel como substrato para produção de biogás em um reator anaeróbio
O presente questionário é um dos instrumentos utilizados na pesquisa de mapeamento de ex- pectativas de diferentes atores em relação às decisões normativas vindouras do Legislativo e
A atenção é um fator essencial no processamento de enunciados em um dado discurso, enquanto a intenção desempenha um papel importante na explicação de como se estrutura o
Os resultados mostraram que a cultura instituída historicamente de que o homem é um ser forte e que, portanto, qualquer sinal de adoecimento ou mesmo de um comportamen- to de
Em termos gerais, proponho-me abordar o conceito de autodeterminação como um recurso normativo e simbólico que representa coisas diferentes de acordo com o contexto e
A ênfase que nossa autora imprime em suas ações sempre foi ancorada em um olhar feminista que se faz necessário em um país no qual as conquistas das pessoas do sexo feminino
Em História de um pescador aparece um personagem peruano, o qual se desloca por longos percursos: “doutor Benevides corria constantemente de Manaus para Santarém, de Santarém para
