Monitoreo y control remoto del brazo robótico Staubli RX 90
Texto completo
Figure
![Tabla 3.1 Características mecánicas del brazo robótico [20]](https://thumb-us.123doks.com/thumbv2/123dok_es/3783576.647325/13.892.243.655.645.806/tabla-características-mecánicas-brazo-robótico.webp)
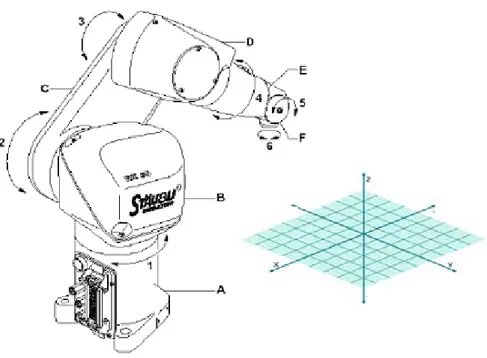
![Figura 3.1 Brazo robótico [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/3783576.647325/14.892.240.654.109.516/figura-brazo-robótico.webp)
![Figura 3.2 Dimensiones del brazo robótico Staubli RX90 [16]](https://thumb-us.123doks.com/thumbv2/123dok_es/3783576.647325/15.892.133.715.139.585/figura-dimensiones-brazo-robótico-staubli-rx.webp)
Outline
Documento similar
En las etapas iniciales del proyecto se diseñó un sistema del control basado en un control remoto como forma de manejar todo lo que relaciona a la cama inteligente, pero esta idea
Además, en este capítulo, se detalla el trabajo realizado tanto en Windows XP, con el uso de la herramienta facilitada por Schunk para controlar los motores, como en Linux, con la
− Un manipulador de menú, si el ítem tiene el flag MF_POPUP, en éste caso hay que hacer un casting a (UINT). − O puede ser cero, si se trata de un separador. El último
Con esta motivación, este trabajo fin de grado expondrá un proyecto que trata de desarrollar un enlace de comunicación entre el sistema de control de a bordo del dron,
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
El fin de este proyecto es el montaje, programación y puesta en marcha de un sistema de visión artificial coordinado con un brazo robótico, para la realización de manipulación
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Esta investigación se basa en una metodología de un proyecto de ingeniería, puesto que se busca resolver un problema práctico, el cual es desarrollar un sistema de monitoreo remoto
