Control servovisual para robot manipulador en 3D
66
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control Servovisual para Robot Manipulador en 3D Autor: Javier González Orozco. jgorozco@uclv.edu.cu. Tutor: Dr. Luis Hernández Santana. Departamento de Automática y Sistemas Computacionales, Facultad de Ingeniería Eléctrica, luishs@uclv.edu.cu. Consultante: Ing. Yoanig Guerra Contino. Departamento de Automática y Sistemas Computacionales, Facultad de Ingeniería Eléctrica, yoanig@uclv.edu.cu. Santa Clara "Año 49 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. "La confianza en sí mismo es el primer secreto del éxito".. Ralph Waldo Emerson..
(5) ii. ¾ A los científicos del mundo. ¾ A los profesionales que supieron transmitirme sus conocimientos. ¾ Al proceso revolucionario en que me he formado. A todos dedico este Trabajo de Diploma..
(6) iii. Agradezco a todas las personas que de una forma u otra han contribuido a la realización de este Trabajo de Diploma. A mi familia por su apoyo incondicional incluyendo a mi novia. A mis amigos. A mi tutor por las horas de entrega y dedicación. A todos…muchas gracias!.
(7) iv. TAREAS TÉCNICAS. Para el desarrollo de este trabajo se realizaron las siguientes tareas: 1. Revisión bibliografías de los principales esquemas de control servovisual, con especial énfasis en los que implementan el control basado en imagen. 2. Modelación matemática del sistema de control propuesto. 3. Análisis y desarrollo de los reguladores. 4. Simulación del sistema para un seguimiento de trayectoria y una entrada escalón por el disturbio.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. El uso de la visión está motivado por la constante necesidad de aumentar la flexibilidad y los campos de aplicación de los sistemas robotizados. En este trabajo se expone el diseño y demostración teórico de una estrategia de control para un robot industrial con realimentación visual usando cámara en mano durante el seguimiento de trayectoria de un objeto en 3D. Para el mismo, luego de un estudio bibliográfico sobre la realimentación visual aplicada a la robótica en el mundo, fue necesaria la utilización de herramientas matemáticas y computacionales para la obtención de los modelos asociados a la plataforma en cuestión, así como la programación de los mismos. Los resultados obtenidos en la simulación dan muestra de la veracidad del esquema de control propuesto..
(9) vi. TABLA DE CONTENIDOS. TAREAS TÉCNICAS ...........................................................................................................iv RESUMEN .............................................................................................................................v TABLA DE CONTENIDOS .................................................................................................vi INTRODUCCIÓN ..................................................................................................................1 Organización del informe ...................................................................................................3 CAPÍTULO 1.. Sistemas Robotizados Realimentados por Visión. .....................................5. 1.1. Estado del arte en los sistemas robotizados con realimentación visual..................5. 1.2. Análisis bibliográfico..............................................................................................7. 1.2.1. Generador de consignas por visión. Control vea y mueva..............................9. 1.2.2. Control servovisual. ......................................................................................12. 1.2.3. Control servovisual basado en posición (IPVS). ..........................................14. 1.2.4. Control Servovisual basado en imágenes (IBVS).........................................15. 1.2.5. Diagramas usados para el control servovisual en 2D. ..................................17. 1.2.6. Diagramas usados para el control servovisual en 3D. ..................................18. 1.3. Propuesta del sistema de control...........................................................................20. 1.4. Conclusiones del Capítulo. ...................................................................................21. CAPÍTULO 2. 2.1. Modelación del Sistema de Control..........................................................22. Representación espacial de los cuerpos rígidos....................................................22.
(10) vii 2.1.1. Descripcion de la posicíon............................................................................23. 2.1.2. Descripción de la orientación. ......................................................................24. 2.2. Modelo de la cinemática. ......................................................................................25. 2.2.1. Cinemática directa. .......................................................................................25. 2.2.2. Cinemática inversa........................................................................................27. 2.3. Modelo dinámico. .................................................................................................27. 2.4. Modelo del sistema de visión................................................................................28. 2.5. Controlador con realimentación visual. ................................................................32. 2.5.1. Objetivo de control. ......................................................................................33. 2.5.2. Controlador propuesto. .................................................................................33. 2.5.3. Control del lazo interno. ...............................................................................33. 2.5.4. Control del lazo externo................................................................................34. 2.6. Conclusiones del capítulo. ....................................................................................36. CAPÍTULO 3. 3.1. Análisis de la Simulación y de los Resultados. ........................................37. Simulación del esquema de control. .....................................................................38. 3.1.1. Sintonía del regulador externo......................................................................39. 3.2. Respuesta ante un disturbio tipo paso...................................................................41. 3.3. Respuesta para un seguimiento de trayectoria......................................................43. 3.4. Error en el seguimiento de trayectoria..................................................................44. 3.5. Análisis económico...............................................................................................45. 3.6. Conclusiones del capítulo. ....................................................................................45. CONCLUSIONES Y RECOMENDACIONES ...................................................................46 Conclusiones.....................................................................................................................46 Recomendaciones. ............................................................................................................47.
(11) viii REFERENCIAS BIBLIOGRÁFICAS. ................................................................................48 ANEXOS ..............................................................................................................................51 Anexo 1 Programación del modelo cinemático directo....................................................51 Anexo 2 Programación del modelo cinemático inverso. ..................................................52 Anexo 3 Programación en Matlab de la ganancia de la cámara. ......................................54 Anexo 4 Esquema en simulink del modelo dinámico desacoplado del robot...................54 Anexo 5 Esquema en Simulink para la simulación ante un paso por el disturbio............55. ..........................................................................................................................................55 Anexo 6 Esquema en Simulink para el seguimiento de trayectoria. ................................55.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. En menos de cuatro décadas la robótica ha pasado de ser un mito propio de la imaginación de algunos autores, a una realidad imprescindible en el mercado productivo. Entre la década de los setenta y ochenta experimentó un notable auge, llegando a los noventa a lo que por muchos ha sido considerando su mayoría de edad, caracterizada por una estabilización de la demanda y un reconocimiento pleno en la industria. La constante necesidad de aumentar la flexibilidad y los campos de aplicación de los sistemas de robótica ha motivado que la visión artificial juegue un importante papel. La realimentación visual en los sistemas robotizados es un tema de gran actualidad, así lo demuestran las publicaciones realizadas por muchos autores entre los que se destacan por su elevado aporte Shirai Y, Hill J, Weiss L.E, Kashimoto K, Corke P y Kelly R. También existen muchos centros de investigaciones cuyo tema de investigación principal está relacionado con el control de manipuladores realimentados por visión entre los que se destacan CSIRO en Australia, Universidad de Okayama en Japón, Laboratorio de Robótica en la Universidad de Colombia y Grupo de Robótica y Visión en USA. En nuestro ambiente científico existen diversos grupos de investigaciones dedicados a la mecatrónica, entre los que se encuentra el grupo GIMAS que radica en la Universidad Central Marta Abreu de Las Villas, donde se han realizado trabajos sobre el control servovisual en robot manipuladores. Estos trabajos han sido presentados en las tesis por opción al título académico de Ingeniero en Automática de Alleiny Machado y Yoani Guerra, (Machado, 2003) y en las tesis presentada en opción al título académico de Máster en Ciencias de René González (González, 2002) y Ernesto Rubio (Rubio, 2000). En estos informes se presentan técnicas de control servovisual en un robot manipulador con cámara en mano y siempre basado en.
(13) INTRODUCCIÓN. 2. un ambiente bidimensional. De estas investigaciones se obtuvieron buenos resultados y de esta forma se creó una base sobre la cual se basa este nuevo trabajo. En este informe se implementan esquemas y algoritmos de control que permiten el seguimiento por parte de una cámara montada en el extremo del brazo de un robot manipulador de un objeto con geometría conocida que se mueve en un ámbito tridimensional. La cámara es acoplada al extremo del brazo del robot, la cual obtiene información visual del medio ambiente para mantener la imagen de un objeto en movimiento de forma esférica en el centro del plano de la imagen con radio constante; los posibles movimientos del objeto son considerados como condiciones iniciales. Para lograr esto, el sistema de control propuesto considera dos lazos en cascada: el lazo interno soluciona el control articular del robot y el externo implementa el control visual directo. En este estudio se desarrollaron los modelos matemáticos de la cinemática tanto directa como inversa, de la dinámica de robot y el de la cámara de visión. El problema cinemático directo y el inverso se solucionó usando métodos geométricos, la dinámica se desarrolló teniendo en cuenta el trabajo presentado por (Rubio, 2000). El modelo de visión fue necesario linealizarlo por series de Taylor para simplificar el desarrollo del mismo y las transformaciones entre los sistemas de referencias se hicieron usando los ángulos de Euler. El estudio en particular se realizó usando el robot manipulador ASEA IRB6 con su muñeca desacoplada mecánicamente. Esta característica posibilita que la cámara adosada a la muñeca mantenga la orientación en el plano vertical, mientras se mueve el brazo del robot. Esto hizo posible que se realizara un análisis general de la respuesta del sistema para un seguimiento de trayectoria, usando como regulador un PI. En este caso los valores proporcionales e integrales de la matriz del controlador PI fueron determinados ante variaciones en el disturbio, reconocido en el esquema de control como la posición del objeto respecto al sistema de referencia del robot. Como criterios de diseño se tuvo en cuenta un tiempo de establecimiento de 1.5seg y se escogió la ganancia de lazo abierto 0.5, como un criterio que garantiza posiciones reales en el robot. Para comprobar el controlador propuesto así como la estabilidad del sistema de control y su desempeño, se hizo la simulación del sistema ante una señal por el disturbio tipo paso y para un seguimiento de trayectoria del objeto, considerando que este se mueve siguiendo una elipse en el espacio..
(14) INTRODUCCIÓN. 3. Como resultados se obtuvo que el sistema tiene cero error en estado estable y cumple estrictamente con el patrón de tiempo de establecimiento. Con este trabajo se espera contribuir a un problema teórico que implica el control servovisual en tres dimensiones con cámara en mano en un robot manipulador y sobre el cual no hay referencias en la literatura que use el mismo esquema de control. Con la ejecución de este trabajo se espera producir cambios en el conocimiento científico a fin de lograr una teoría más acertada y profunda sobre el tema. La futura implantación de estos conocimientos estaría encaminada a diferentes tipos de robots, tanto manipuladores como móviles en entornos no estructurados que justifiquen el uso de la información visual. Organización del informe Como parte fundamental que sería el cuerpo de los 3 capítulos siguientes está el estado del arte, modelo de visión y del robot, y por último simular el esquema de control propuesto. De esta forma en el primer capitulo se hace un estudio del estado del arte del control con realimentación visual, donde se analizan los principales esquemas clásicos de control. Concluyendo así con la propuesta del esquema de control de esta tesis, la cual implementa dos lazos en cascada, el lazo interno resuelve el problema articular de posicionamiento de robot y el externo esta dedicado al control de las componentes de al imagen. Ya en el segundo capítulo se desarrolla la modelación del sistema de control propuesto en el primer capítulo basándonos en las herramientas matemáticas. Los modelos de la cinemática tanto directo como inverso fueron resueltos aplicando métodos geométricos, el modelo de visión se linealizó utilizando las series de Taylor y la dinámica no se tuvo en cuenta, considerando solamente el efecto de los actuadores, que en este caso son servomecanismos..
(15) INTRODUCCIÓN. 4. En el tercer capítulo se implementa el control propuesto en el capítulo I, usando las herramientas matemáticas desarrolladas en el dos, se simula el sistema de control propuesto y por último se hace un estudio de los resultados obtenidos, demostrándose la factibilidad de implementación de un control servovisual en 3D para un robot manipulador, tanto ante perturbaciones tipo escalón como en el seguimiento de señales elípticas en el espacio cartesiano. Finalmente son dadas las conclusiones y las recomendaciones. ..
(16) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 5. CAPÍTULO 1. Sistemas Robotizados Realimentados por Visión.. En este capítulo se hace un estudio del estado del arte en los sistemas robotizados, analizando los principales artículos referenciados en la literatura mundial sobre el tema, así como una descripción de la evolución del control en los robots manipuladores realimentados por visión, dejando definido los principales esquemas de control propuestos por autores de reconocido nombre a nivel internacional. En el estudio de la bibliografía se tiene en cuenta las principales definiciones y conceptos sobre los cuales se basa este estudio. Se hace un análisis de los esquemas de controles más utilizados, analizando las ventajas y desventajas de cada uno y al final se deja la propuesta que será modelada y simulada en capítulos posteriores. 1.1. Estado del arte en los sistemas robotizados con realimentación visual.. Los sistemas robotizados desde su surgimiento en la década de los sesenta han tratado de ser cada vez más independientes de un operador humano, por lo que se le han integrado sensores externos que le den cierta información del entorno y de esta forma hacerlos completamente autónomos. Un sensor de visión es uno de los que más información aporta sin interactuar ni cambiar el medio. A principio de los años setenta se empezaron a realizar las primeras investigaciones que usaban la visión artificial como realimentación del entorno a los robot manipuladores y es así que se hace la primera publicación por (Shirai y Inoue, 1973) donde se usó por primera vez el control con realimentación visual y que años más tarde se llamaría por lo que se conoce en la actualidad como control servovisual, nombre que aparece en el artículo de (Hill y Park, 1979) y que constituye básicamente en dotar a los manipuladores industriales la posibilidad de tener realimentación de la disposición del entorno de trabajo usando cámaras de visión artificial. En la década de los ochenta aparecen.
(17) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 6. los primeros sistemas de control visual basados en imagen (IBVS) y los sistemas de control visual basados en posición (PBVS) propuestos por (Weiss y otros., 1987). En la decáda de los noventa se publica la estructura de control vea y mueva clásico por (Corke y Goodz, 1993) y (Carelli, 1998), que consiste en un sistema a lazo abierto en el lazo de visión el cual, después de tomar la foto, la procesa para estimar la consigna y se la envía al robot. En ese mismo tiempo aparece el concepto de control vea y mueva dinámico como lo llama (Hutchinson y otros., 1996), que toma la forma de un control en cascada de realimentación por visión con un control clásico generalmente en coordenadas articulares (Hashimoto y otros., 1991). El control vea y mueva dinámico presentado en (Hutchinson y otros., 1996) y (Kelly y otros., 2000) puede ser implementado de dos formas diferentes: cámara en mano o cámara fija, según (Flandin y otros., 2000). El uso de los sensores de visión en la realimentación de los lazos es una interesante solución para el control en movimiento de los sistemas robotizados que trabajen de forma autónoma en un ambiente no estructurado, así lo plantea (Carelli y otros., 2004) y (Enescua y otros., 2006). Múltiples trabajos y herramientas han sido desarrolladas en los recientes años en este campo, tal es el caso de (Corke, 2005). El seguimiento de un objeto por un robot manipulador con realimentación visual se puede hacer en dos o en tres dimensiones, una solución interesante para el caso de 2D con cámara en mano en un robot manipulador se puede encontrar en (Bonfe y otros., 2002) y en (González y otros., 2003), en este último se presenta la estabilidad de un control desacoplado. Para el seguimiento en 3D la principal solución reportada fue usando un control de tipo mirar y mover con una cámara en mano (Sim y otros., 2002) y con más de una cámara lo han realizado (Hui y otros., 2005), (Namiki y otros., 2003) y (Nakabo y otros., 2002). De esta manera (Enescua y otros., 2006) presentan un robot móvil siguiendo a una persona usando una cámara stereo-head(cámara doble). Actualmente existen muchos centros de investigación y personalidades cuyo tema de investigación principal es el control servovisual destacándose por orden alfabético: •Asada Lab, U. Osaka, Japan •Bill Wilson, U.Waterloo, Canadá. •CMU, USA (Pradeep Khosla, Brad Nelson). •Dan Koditschek (U. Michigan, USA)..
(18) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 7. •Greg Hager, Yale Vision and Robotics Group, USA. •Koichi Hashimoto, (Okayama University), Japan. •INRIA, Sophia-Antipolis, France (Claude Samson, Patrick Rives). •Miyazaki Lab, U. Osaka, Japan. •Nikos Papanikolopoulos, U. Minnesota, USA. •Peter Corke, CSIRO, Australia. •Robotics Laboratory at Columbia University, USA (Peter Allen, Shree Nayar). •Seth Hutchinson, U.Illinois (Urbana-Champaign), USA. •U. Rochester (Chris Brown, Martin Jagersand), USA. •Giulio Sandini (U. Genova, Italy). •Uchida Lab, Waseda U., Japan. •Philippe Martinet, LASMEA, Blaise Pascal U., France. •Francois Chaumette, IRISA, France. •Radu Horaud, INRIA Rhône-Alpes, France. •Jim Crowley, INRIA Rhône-Alpes, France. Por la extensa lista de investigadores y proyectos que están en desarrollo en el tema, se hace evidente la demanda que existe de sistemas de control servovisual y la importancia que tiene el desarrollo de sistemas cada vez más autónomos en la industria moderna. Se han desarrollado aplicaciones en robots móviles, en los que es de suma importancia la representación del entorno. 1.2. Análisis bibliográfico.. Numerosas obras han surgido en el mercado bibliográfico desde 1980. En alguna de ellas se aprecia la tendencia de presentar la robótica como un simple repaso de las disciplinas básicas; electrónica, informática, mecánica, etc. Otros, por el contrario, se especializan en los estudios de la robótica encaminada a un complicado conjunto de problemas físicos matemáticos, orientados a conocer con detalles el funcionamiento del sistema de control..
(19) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 8. La teoría del control visuomotor a diferencia de otras disciplinas, tiene pocas cosas estandarizadas, y las que se han publicado se encuentran en constante cambio según la apreciación de los autores. Cada investigador o Centros de Investigaciones ha puesto sus esfuerzos en áreas diferentes, afines a su interés, y para ello han creado sus propias definiciones y conceptos. Este trabajo es la continuación de (González y otros., 2003) que se desarrolló aplicando técnicas de control servovisual en un robot con cámara en mano pero siempre pensando en un plano, en el cual estaría un objeto que sería seguido por el robot. De esta tesis (González y otros., 2003) se obtuvieron relevantes resultados que han servido de base para nuestro trabajo con las modificaciones necesarias para que se pueda implementar el mismo esquema de control en tres dimensiones. En este trabajo se hacen referencia a los términos de control visuomotor, modelado de la cámara y del robot, estos se pueden encontrar en (Hutchinson y otros., 1996). En principio existen dos configuraciones básicas de las estrategias de control: cámara fija y cámara en mano. Los sistemas de control con cámara fija, ubican el marco de referencia de la cámara sobre el marco de referencia del sistema global y captura la imágenen del manipulador y de su entorno. Esta configuración tiene como objetivo fundamental mover el manipulador en un sentido tal que su extremo, con algún tipo de herramienta o garra alcance el objeto deseado, así lo han hecho (Nakabo y otros., 2002) y (Namiki y otros., 2003). Los sistemas de control con cámara en mano usan el sensor de visión montado en el extremo del manipulador y suministra la información necesaria del ambiente de trabajo. El objetivo de esta estrategia es mover el manipulador de manera tal que la proyección de un objeto estático o en movimiento se ubique siempre en una posición deseada en la imagen entregada por la cámara, como lo han estudiado entre otros (Weiss y otros., 1987), (Hashimoto y otros., 1991), (Hutchinson y otros., 1996) y (González y otros., 2003)..
(20) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 9. Existen dos grandes grupos de sistema de control visuomotor que según (Ibarra, 1997) y (Carelli, 1998) se clasifican en: ¾ Generación de consigna por visión. ¾ Servomecanismo visual. Otros autores como (Hutchinson y otros., 1996) y (Weiss y otros., 1987) tienen en cuenta si el error del controlador es dado en posiciones del robot o directamente en características de la imagen. Para nuestra exposición usaremos la combinación de ambos. 1.2.1 Generador de consignas por visión. Control vea y mueva. El control vea y mueva es básicamente un control secuencial que desacopla el lazo de control de movimiento del manipulador y el lazo externo de visión (Ibarra, 1997) y (Hutchinson y otros., 1996). Se pueden tomar varias filosofías en la generación de la consigna según las características del objeto. Para objetos estáticos el sistema toma una imagen, genera una consigna y el control de movimiento se encarga del resto (Carelli, 1998), Fig. 1.1.. Fig. 1.1 Estructura de control vea y mueva.. Ahora, si el objeto es móvil es necesario que el lazo externo de realimentación por visión esté constantemente chequeando la posición del objeto y rectificando la trayectoria para corregirla, si hubo algún movimiento en el objeto. (Weiss y otros., 1987) y (Hutchinson y otros., 1996) han nombrado este último como: control vea y mueva dinámico, Fig. 1.2. Teniendo en cuenta que la mayoría de los manipuladores industriales no dan posibilidad de.
(21) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 10. variar el algoritmo de control, la configuración vea y mueva dinámico, por sus características de sencillez y aplicabilidad es uno de los más usados mundialmente sobre todo para aplicaciones de manipulación de objetos. Abarca un gran campo de aplicaciones y puede ser implementado en cualquier tipo de robot industrial. La baja frecuencia de muestro disponible en los sistemas de visión artificial hacen de los sistemas con control directo de la herramienta (TCP tool center point) sean bastante complejos. Usando un lazo de realimentación interno con una alta razón de muestreo hace que el sistema responda mucho mejor a la dinámica del manipulador. Muchos de los robots industriales existentes poseen una interfaz para recibir velocidad en el plano cartesiano o comandos para incrementar las posiciones. Esto simplifica el sistema servovisual y lo hace mucho más portable. Desde el punto de vista del controlador vea y mueva separa las singularidades del mecanismo del controlador visual permitiendo que el robot sea un dispositivo ideal de movimiento cartesiano. La otra clasificación según (Weiss y otros., 1987) y (Hutchinson y otros., 1996) está basada en la realimentación donde se agregarían al sistema de control bloques para extraer las características de la imagen (Ibarra, 1997) y estimar la posición con un algoritmo de control cartesiano (Fu y otros., 1988) y (Rubio, 2000), Fig. 1.2. En el control basado en posición (PBVS) las características son extraídas de la imagen y en conjunto con el modelo de la cámara se estima la posición del objeto con respecto a la misma.. Fig. 1.2 Estructura vea y mueva dinámico basada en posición.. El otro es un controlador en el espacio de las características de la imagen donde solo es necesario extraer las características y el punto deseado en determinado vector de.
(22) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 11. características de la imagen, (Rubio, 2000), Fig. 1.3. El control basado en imagen reduce el costo computacional, elimina los errores que pudieran presentarse por la interpretación de la imagen y eliminan errores dados por el modelo de la cámara y los errores de la calibración.. Fig. 1.3 Estructura vea y mueva dinámico basado en imagen.. Existen varias configuraciones que se han publicado durante los últimos años como las presentadas por (Ibarra y otros., 1996), donde en un primer caso presenta una configuración vea y mueva donde usa el modelo cinemático inverso del robot y la cámara, en cascada con un controlador articular. Esta solución de control vea y mueva presenta la dificultad de tener que hallar las cinemáticas inversas con los problemas de singularidad que esto acarrea y las dificultades de la calibración de la cámara. En (Ibarra y otros., 1996) se presenta una segunda versión del mismo modelo pero esta vez con el uso de una red neuronal para la identificación de la cinemática inversa del robot y de la cámara, ver Fig. 1.4, quitando del camino los problemas de tener que hacer un modelo cinemático exacto y los requerimientos de potencia de cálculo para procesar las imágenes y para obtener las consignas articulares, así como la complejidad de la calibración de la cámara..
(23) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 12. Fig. 1.4 Control vea y mueva con cinemática inversa y control articular.. 1.2.2 Control servovisual. Una de las aplicaciones típicas de control visual es posicionar y orientar la herramienta (TCP) en una configuración relativa al objeto. Por ejemplo en aplicaciones de manipulación muchos investigadores usan la cámara montada en la herramienta del robot para ubicarla y orientarla en una posición determinada relativa al objeto, es decir obtener siempre la misma imagen del objeto independientemente de su posición y orientación. La posición de la cámara con respecto al objeto es determinada solamente por la relación cinemática conocida de la cámara. Errores en la relación cinemática produce errores que no pueden ser vistos por el sistema. Observar la herramienta directamente da una posibilidad de censar y corregir este error. En general no existe garantía en el posicionamiento de un sistema sin que ambos, el TCP y el objeto sean vistos, el esquema de control se conoce como control servovisual basado en posición (PBVS), ver Fig. 1.5. Los sistemas que solo ven el objeto suelen llamarse EOL (end-point-open loop), como se le conoce en la literatura inglesa y los que ven al objeto y al TCP se les conoce como ECL (end-point-closed loop), (Hutchinson y otros., 1996). Es posible convertir un EOL en un ECL simplemente incluyendo una observación directa del TCP. Como el sistema ECL tiene que seguir a la herramienta del robot como si fuera un objeto en movimiento más a procesar, la implementación del sistema de visión requiere un costo computacional muy alto y algoritmos extremadamente complicados con restricciones en el campo de visión de la cámara (field of view) que no siempre pueden ser solucionados..
(24) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 13. Fig. 1.5 Estructura servovisual basada en posición (PBVS).. Para la aplicación de estos sistemas es necesario tener acceso al controlador del manipulador para variar el algoritmo de control, inconveniente este para la mayoría de los manipuladores de las grandes firmas productoras que no permiten acceder al algoritmo de control. Estos sistemas pueden ser usados con configuración cámara fija aunque últimamente están siendo usados preferentemente cámara en mano, donde el sistema de visión es el encargado de realimentar la posición en línea para el cual se diseña un control servovisual directo sobre la base de éste al error con respecto a una posición deseada, para estos sistemas (Weiss y otros., 1987) propusieron el esquema de control de la Fig. 1.6. Para estos sistemas y para objetos móviles se hace muy difícil el problema del calibrado de la cámara, apareciendo dificultades en el seguimiento del objeto, estabilidad del controlador y la autocalibración de la cámara, tema al que dedicaremos un análisis en el siguiente capítulo. En estos sistemas se usan diversas tecnologías en las que se destaca el flujo óptico y el uso de sistemas adaptables para la estimación del movimiento.. Fig. 1.6 Control servovisual basado en imagen (IBVS).. A continuación se describen los sistemas basados en posición y en imagen con más detalle..
(25) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 14. 1.2.3 Control servovisual basado en posición (IPVS). Como se describió anteriormente, en el control visual basado en posición, las características del objeto son sacadas de la imagen y usadas para estimar su posición con respecto a la cámara. Usando este valor, el error entre la actual y la posición deseada del robot es definida en el espacio de la tarea. Si se considera una posición y orientación general para la cual se satisface la tarea completamente, la función de error restringirá algún número de grados de libertad del manipulador, denominados, grados de libertad de la restricción. Esto fue estudiado y desarrollado por (Espiau y otros., 1992) donde la función de error cinemático se puede pensar que representa una restricción cinemática virtual entre el objeto y el extremo del robot. Una vez que ha sido definida en forma adecuada la función de error cinemático y los parámetros estimados, se diseña un regulador de manera tal que reduzca los valores estimados de la función de error cinemático a cero. Este regulador produce en todo instante de tiempo una velocidad (de orientación y posición) deseada del extremo que es enviada al subsistema de control del robot. Como se ha dicho anteriormente este tipo de control servovisual no abunda en la industria por la necesidad de modificar el control del robot, mas se han encontrado algunos sistemas como los presentados en (Ibarra, 1997). Donde presenta dos variantes: una con configuración Jacobiano inverso más controlador articular como se presenta en la Fig. 1.7.. Fig. 1.7 Jacobiano Inverso más control articular.. Donde se calcula el error de posición cartesiano usando directamente la medición proporcionada por el sistema de visión y la posición cartesiana equivalente del robot, obtenida transformando la medición de sus sensores articulares y luego se transforma en.
(26) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 15. error articular mediante el jacobiano inverso. Finalmente se aplica un controlador articular clásico. La segunda alternativa es del tipo control cartesiano más jacobiano transpuesto, como se aprecia en la siguiente figura.. Fig. 1.8 Control cartesiano más jacobiano transpuesto.. En esta variante se utiliza el error cartesiano en un controlador cartesiano, cuya salida deberá transformarse en una variable de control articular mediante el jacobiano transpuesto del robot. Como se ve en este último esquema no se necesita la inversión del jacobiano del robot, sino la transpuesta, eliminando de esta forma los consabidos problemas de singularidad que generalmente exhiben tales modelos, o simplemente su complejidad. 1.2.4. Control Servovisual basado en imágenes (IBVS).. Como se describió anteriormente, en el control servovisual basado en imágenes, las señales de error se definen directamente en términos característicos de imagen (en contraste con los métodos basados en posición que definen señales del error en el espacio de coordenadas de la tarea), (Hutchinson y otros., 1996). Este tipo de sistemas, como en los anteriormente expuestos, se pueden clasificar de acuerdo a su configuración en sistemas con cámara fija, o sistemas con cámara en mano, según a la posición que ocupe el sensor de visión. En cualquier caso el movimiento del manipulador causa cambios en la imagen observada por la cámara. De tal manera que la especificación de la tarea servovisual basada en imagen involucra la determinación de una apropiada función de error (Carelli, 1998), tal que.
(27) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 16. cuando ésta sea satisfecha la función sea cero. Esto se puede lograr por medio de ecuaciones de proyección o por un mecanismo del tipo “aprende por observación” en el cual el robot es movido a una posición objetivo de la imagen deseada y la imagen correspondiente es usada para extraer el vector de parámetros característicos de la imagen (Hashimoto y otros., 1992). Si la tarea se define con respecto a un objeto en movimiento, el error E sería función no solo de la posición y orientación del extremo, sino también de la orientación y posición del objeto. Aunque el error E está definido en el espacio de parámetros de imagen, las entradas al control del manipulador se definen típicamente o en el espacio de las coordenadas articulares o en el espacio de coordenadas de la tarea, (Herminio, 2000). Por lo tanto, será necesario relacionar los cambios en los parámetros característicos de la imagen a los cambios en la posición y orientación del robot, (Carelli, 1998). El jacobiano de la imagen, que es explicado en los capítulos posteriores es el encargado de modelar estas relaciones. Un ejemplo de sistema servovisual directo es el presentado en (Carelli, 1998) y (Herminio, 2000) en la Fig. 1.9 con compensación de gravedad. Es un modelo que a diferencia de los vistos anteriormente usa el modelo dinámico del robot.. Fig. 1.9 Control servovisual directo con compensación de gravedad.. En la bibliografía se han propuesto diversos algoritmos de control, la mayoría sin demostraciones de estabilidad, aunque se conocen tesis doctorales como la de (Herminio, 2000) y artículos como (Carelli, 1998) y (Kelly y otros., 2000), que han dedicado especial interés al análisis de la estabilidad, lo que demuestra un progresivo desarrollo en este tipo de controles que aunque todavía no tienen las prestaciones para implementarse en robots de muchos grados de libertad, si dan una idea de la valides de los mismos y la certeza de seguirlos desarrollando..
(28) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 17. El esquema de la Fig. 1.10 presentado por (González, 2002) introduce dos lazos en cascada, uno interno en las articulaciones del robot y otro externo en el control visual directo, donde se corrige el error en píxel en cámara. Cada lazo de control se ejecuta con un tiempo de muestreo diferente.. Fig. 1.10 Estructura vea y mueva con control cartesiano basado en imagen.. Donde: Es el valor deseado y corresponde con el centro de la imagen. Es el valor obtenido de la característica de imagen que en este caso es el centroide del objeto (centro geométrico), Es el error de posición en píxeles del objeto. Sería el regulador en cuestión actuando en el plano de la imagen, un regulador PI por cada eje del la cámara. Sería la cinemática inversa del robot. 1.2.5 Diagramas usados para el control servovisual en 2D. El seguimiento de un objeto que se mueve en un plano por un robot manipulador que tenga realimentación visual de la posición, ha sido tema de investigación para muchos autores. Una de las soluciones más interesantes fue presentada por (Bonfe y otros., 2002) donde la imagen es adquirida desde una cámara que está montada en el extremo de un robot industrial. El procesamiento de la imagen se realiza en una PC y de esta forma se cierra el lazo de control. Se implementa un regulador PID con el cual se logra una buena respuesta ante un paso y cero error en estado estable, el diagrama de control se muestra en la Fig. 1.11..
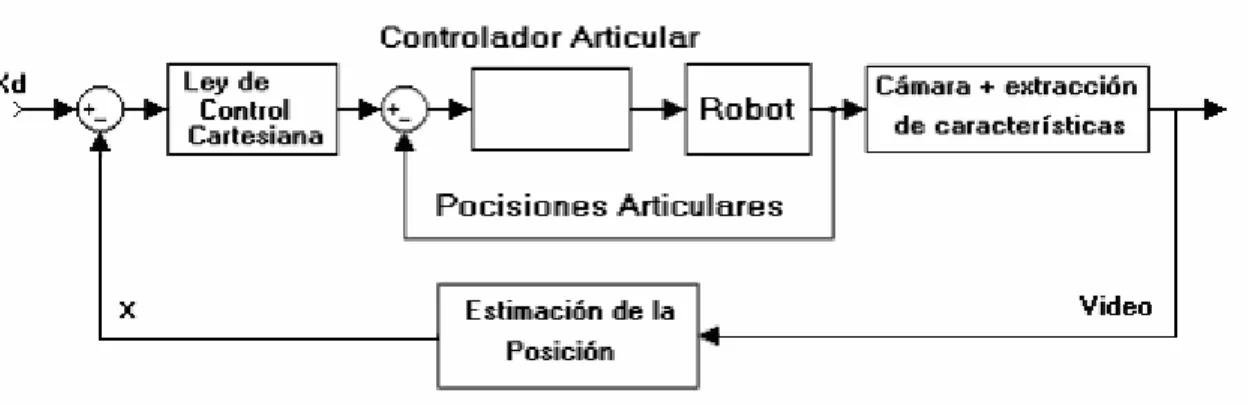
(29) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 18. Fig. 1.11 Diagrama en bloque del sistema de control.. Otra solución fue presentada por (Hernández y otros., 2005) donde se analiza una configuración tipo vea y mueva dinámico basado en imagen, cuya implementación requiere de la cinemática inversa del robot y un regulador PI como ejemplo de controlador. El sistema presentado asume las incertidumbres del modelo de visión y la calibración en línea de la cámara no es necesaria. Con la variante propuesta se logra simplificar un sistema altamente no lineal a un clásico control lineal multivariable. Se demuestra la estabilidad del sistema, presentando los resultados de la simulación y la implementación en un robot industrial ASEA IRB6, el diagrama de control se muestra en la Fig. 1.12.. Fig. 1.12 Diagrama en bloque del sistema de control en 2D.. 1.2.6 Diagramas usados para el control servovisual en 3D. El seguimiento de trayectoria de un objeto en el espacio es un tema que se encuentra en constate desarrollo por muchos investigadores. Hasta la actualidad las principales soluciones que se han reportado usan un control de tipo mirar y mover. En (Sim y otros., 2002) se puede encontrar una solución de este tipo, donde la realimentación visual se obtiene de una cámara. Los resultados experimentales demuestran claramente la capacidad.
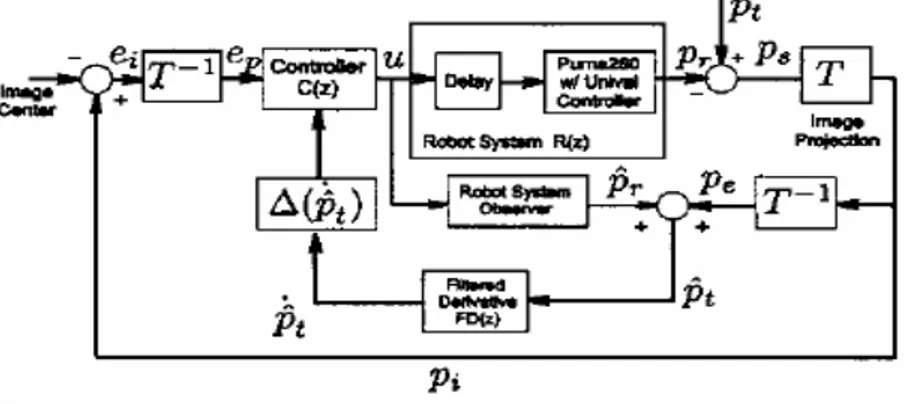
(30) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 19. del sistema de control visual usando el Predictor de Smith Modificado (MSP) en la ejecución del servomecanismo visual de 3D. El esquema de control se muestra en la siguiente figura.. Fig. 1.13 Estructura de control servovisual MSP.. Donde K es el regulador digital, G y GA son los modelos del sistema robotizado, S representa el sistema de captura de imagen, D es el retardo de tiempo involucrado en el procesamiento de imagen. La variables r, d, u, son la referencia, el disturbio y la señal de control respectivamente, YN y YM son las salidas medidas y estimada respectivamente. Usando el mismo tipo de control pero con más de una cámara se han realizado algunos trabajos como el de (Namiki y otros., 2003) donde se propone una arquitectura jerárquica para el control servovisual de alta velocidad y se demuestra que el sistema también tiene flexibilidad para poder seleccionar diferentes tareas según cambios dinámico en el entorno. Esta flexibilidad es debido al diseño conveniente de los algoritmos del control y de la arquitectura de control. Siguiendo esta misma línea de usar dos cámaras, (Nakabo y otros., 2002) desarrollaron un control para el seguimiento de trayectoria en 3D de un objeto usando dos sistemas de vision de alta velocidad denominado Column Parallel Vision (CPV). Basado en el mismo tipo de control mirar y mover, pero con una cámara stereohead (Enescua y otros., 2006) desarrollaron un sistema de arquitectura móvil para el seguimiento de una persona, constituido por un módulo activo de visión estéreo (ASVM) y un módulo de navegación. El sistema se demostró poniéndolo en ejecución sobre una plataforma de sillón de ruedas..
(31) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión. 1.3. 20. Propuesta del sistema de control.. Después de haber realizado un análisis de todas las estrategias de control con realimentación visual, quisiéramos hacer algunas valoraciones comparativas de los mismos y algunas decisiones tomadas para el desarrollo de esta tesis. Comparando los sistemas vea y mueva con los sistemas que usan realimentación visual directa podemos concluir: El control vea y mueva requieren bajas razones de muestreo para el lazo de visión lo que permite mejorar los algoritmos de procesamiento de imágenes y el uso de algoritmos más complicados y caros en tiempo de cómputo. Tienen la facilidad de ser aplicados en la gran variedad de los robots industriales los que generalmente poseen una interfaz para recibir consignas de velocidades cartesianas. Otra importante ventaja es el aislamiento de las singularidades de la cinemática del manipulador con el control visual posibilitando que el robot sea visto, para el lazo externo, como un controlador cartesiano ideal. Estas ventajas nos serán muy útiles para la propuesta de nuestro esquema de control que se aleja un poco de lo que está reflejado en la literatura actual sobre el tema. Las formas clásicas de control servovisual actúan directamente sobre los motores del robot resolviendo el problema de control con un solo lazo de control a nivel de lazo de visión. La propuesta de (Hernández y otros., 2005) desarrollada dentro del grupo de robótica de la UCLV plantea una solución de lazos en cascada con resultados demostrados teóricamente y validados en la práctica, en la continuación de esa idea se presenta en esta tesis una modificación al esquema de control presentado por Hernández que da solución al control servovisual en tres dimensiones usando un robot manipulador para el seguimiento de trayectoria de un objeto. El diagrama en bloque propuesto se puede apreciar en la siguiente figura..
(32) CAPÍTULO I. Sistemas Robotizados Realimentados por Visión.. 21. Fig. 1.14 Esquema de control propuesto.. En este diagrama se introduce la solución de la cinemática directa Cdir y la cinemática inversa Cinv en el lazo de control externo y se considera la posición del objeto en el espacio como un disturbio. El sistema presentado se enmarca dentro de los que en la literatura se denominan como control servovisual pues registra errores de posicionamiento directamente en cámara y cierra un lazo de control de visión, no obstante, no es un sistema servo pues en valor deseado ξd, error en píxel en cámara, es fijo, normalmente 0, y el sistema trabaja para mantener este estado de equilibrio a pesar de la existencia de disturbios. Es un esquema del tipo regulador, por ello consideramos al sistema propuesto como un control visual directo con lazo interno de posicionamiento. 1.4. Conclusiones del Capítulo.. Se ha presentado, a partir de un análisis de la literatura, un nuevo sistema de control con realimentación visual, con error en el sensor de posición (cámara) en el plano de la imagen (píxel en cámara) que trabaja en un esquema tipo regulador, pues el valor deseado es el centro de la imagen y actúa a variaciones de las condiciones iniciales, dadas en este caso por la posición del objeto respecto al mismo. La demostración de la factibilidad de trabajo de este sistema y su implementación práctica se verá en el desarrollo de esta tesis..
(33) CAPÍTULO II. Modelación del Sistema de Control.. 22. CAPÍTULO 2. Modelación del Sistema de Control.. Para llevar a cabo satisfactoriamente la tarea de probar nuestro esquema de control visual propuesto en el capitulo anterior es necesario el auxilio de todo un bagaje de herramientas matemáticas para la modelación de dicho sistema y una posterior simulación. Necesitamos pues conocer el modelo dinámico y cinemático de nuestro robot y el de la cámara de visión utilizada. Este capítulo está constituido por seis epígrafes en los cuales se describen la posición y orientación de los cuerpos rígidos en el espacio, el problema cinemático tanto directo como inverso, el modelo dinámico, el modelo de la cámara y por último el diseño del controlador 2.1. Representación espacial de los cuerpos rígidos.. La manipulación de piezas llevadas a cabo por un robot implica el movimiento de espacial de su extremo. Asimismo, para que el robot pueda recoger una pieza, es necesario conocer la posición y orientación de ésta con respecto a la base del robot. Se aprecia entonces la necesidad de contar con una serie de de herramientas matemáticas que permitan especificar la posición y orientación el espacio de piezas, herramientas y, en general cualquier objeto. Estas herramientas han de ser lo suficientemente potentes como para como para permitir de forma sencilla relaciones espaciales entre distintos objetos y en especial entre estos y el manipulador. Para el estudio de estas herramientas se toma como referencia primaria el libro de (Barrientos y otros., 1997), del cual se han tomado los conceptos básicos..
(34) CAPÍTULO II. Modelación del Sistema de Control.. 23. 2.1.1 Descripcion de la posicíon. Para localizar un cuerpo rígido en el espacio es necesario contar con medios que permitan la localización espacial de sus puntos. La forma más intuitiva y utilizada de especificar la posición de un punto son las coordenadas cartesianas. Existen además otros métodos, igualmente válidos, y también ampliamente extendidos, como son las coordenadas polares para dos dimensiones, las cilíndricas y las esféricas para espacios tridimensionales. Normalmente los sistemas de referencia se definen mediante ejes perpendiculares entre sí con un origen definido, estos se denominan sistemas cartesianos y son los que se usan en este trabajo. Una vez fijado un sistema de coordenadas se puede ubicar cualquier punto del espacio con respecto a ese sistema con un vector de posición de tres magnitudes. Para representar las coordenadas de un punto p con respecto al sistema de coordenadas A. O A se utiliza la notación. p . Esto significa que los elementos de. A. p tienen valores. numéricos que indican distancias a lo largo de los ejes del sistema O A . Los elementos individuales de éste vector definidos a lo largo de los ejes x , y , z se representan con la A. notación A. p=. [. A. px , Ap y , Apz. px. A. py. A. . La forma vectorial del punto estará representada por:. pz. ]. T. ∈ ℜ3. [2. 1]. La Fig. 2. 1 muestra dos sistemas de coordenadas O A y O B con la misma orientación pero en donde sus orígenes no coinciden. Dado un punto p expresado en el sistema de coordenadas O B se puede expresar respecto al sistema de coordenadas O A por la ecuación: A. p = B p + A p Borg. [2. 2] A. Donde la expresión. p Borg. denota el vector de traslación del origen del sistema de. coordenadas OB medido desde el sistema O A . Esta forma de expresar puntos en distintos sistemas de coordenadas representa un mapeo de traslación de un sistema a otro. Por lo tanto, la expresión. A. p Borg define este mapeo, debido.
(35) CAPÍTULO II. Modelación del Sistema de Control.. 24. a que toda la información necesaria para ejecutar el cambio en la descripción del punto esta contenida en esta expresión.. Fig. 2. 1 Traslación de sistemas de coordenadas.. 2.1.2 Descripción de la orientación. Un punto queda totalmente definido en el espacio a través de los datos de su posición. Sin embargo, para el caso de un sólido, es necesario además definir cuál es su orientación respecto a un sistema de referencia. En el caso de un robot, no es suficiente con especificar cuál debe ser la posición de su extremo, sino que en general, es también necesario indicar su orientación. Una orientación en el espacio tridimensional viene definida por tres grados de libertad o tres componentes linealmente independientes. Para poder describir de forma sencilla la orientación de un objeto respecto a un sistema de referencia, es habitual asignar solidario al objeto un nuevo sistema de referencia, y después estudiar la relación existente entre los dos sistemas. De forma general, esta relación vendrá dada por posición y orientación del sistema asociado al objeto respecto al de referencia y se puede determinar usando la matriz de rotación, ángulos de Euler y los cuaternios. En este trabajo el análisis de la orientación del objeto en el espacio se hace usando los ángulos de Euler por su fácil comprensión y porque usa solo tres elementos para la descripción de la orientación. Todo sistema OUVW solidario al cuerpo cuya orientación se quiere describir, puede definirse con respecto al sistema OXYZ mediante tres ángulos: φ ,θ ,ψ , denominados ángulos de Euler. Girando sucesivamente el sistema OXYZ sobre unos ejes determinados.
(36) CAPÍTULO II. Modelación del Sistema de Control.. 25. de un triedo ortogonal los valores de φ ,θ ,ψ , se obtendrá el sistema OUVW . Es necesario, por tanto, conocer además de los valores de los ángulos, cuales son los ejes sobre los que se realizan los giros. Existen diversas posibilidades (24 formalmente definidas), siendo las tres más usuales ángulos de Euler ZXZ, ángulos de Euler ZYZ y la denominada alabeo, cabeceo y guiñada esta última muy usada en la aeronáutica. En el desarrollo de este trabajo se usan los ángulos de Euler ZYZ, por su fácil implementación. La representación matemática de estos ángulos se puede hacer realizando la siguiente secuencia de rotaciones: T = T ( z , φ )T (v, θ )T ( w,ψ ). [2. 3]. Que desarrollado en forma matricial quedaría:. ⎡CφCθCψ − SφSψ T = T ( z, φ )T (v,θ )T ( w,ψ ) = ⎢⎢ SφCθCψ + CφSψ ⎢⎣ − SθCψ. − CφCθSψ − SφCψ − SφCθSψ + CφCψ SθSψ. CφSθ ⎤ SφSθ ⎥⎥ Cθ ⎥⎦. [2. 4]. Donde S y C representan las funciones trigonométricas seno y coseno respectivamente. 2.2. Modelo de la cinemática.. La cinemática del robot describe el movimiento del mismo respecto a un sistema de referencia. Analiza el movimiento espacial del robot y las relaciones entre la posición y la orientación del extremo final del robot con los valores que toman sus coordenadas articulares. En la cinemática se presentan dos problemas, el primero se conoce como el problema cinemático directo que consiste en determinar cuál es la posición y orientación final del robot con respecto a valores conocidos de las articulaciones y los parámetros geométricos de los elementos del robot y el segundo llamado problema cinemático inverso que resuelve la configuración que debe tener adoptar el robot para una posición y orientación del extremo conocidas. 2.2.1. Cinemática directa.. Dado que un robot se puede considerar como una cadena de cinemática formada por.
(37) CAPÍTULO II. Modelación del Sistema de Control.. 26. objetos rígidos o eslabones unidos entre sí mediante articulaciones, se puede establecer un sistema de referencia situado en la base del robot y describir la localización de cada uno de los eslabones con respecto a dicho sistema de referencia. De esta forma, el problema cinemático directo se reduce a encontrar una relación entre la posición y la orientación del extremo del robot respecto del sistema de referencia fijo situado en la base del mismo. Aunque para describir la relación que existe entre dos elementos continuos se puede hacer uso de cualquier sistema de referencia ligado a cada elemento, la forma más habitual que se suele utilizar en la robótica es la representación de Denavit-Hartenberg (D-H). Esta representación es un método matricial que permite establecer de manera sistemática un sistema de coordenadas {S i } ligado asociado a cada eslabón i de una cadena articulada, pudiéndose determinar a continuación las ecuaciones de la cinemática de la cadena completa. En nuestro caso particular la ubicación de los sistemas de coordenadas asociados a cada eslabón fueron realizados según los algoritmos de D-H, quedando la distribución como lo muestra la siguiente figura.. Fig. 2. 2 Distribución de los sistemas de coordenadas.. El uso de esta representación permite pasar de un eslabón a otro superior mediante cuatro transformaciones básicas que dependen exclusivamente de las características geométricas.
(38) CAPÍTULO II. Modelación del Sistema de Control.. 27. de los eslabones, para el robot que tratamos estas características se pueden apreciar en la siguiente tabla. Tabla 2. 1 Parámetros D-H para el robot ASEA-IRB6.. Articulación. θi. di. ai. αi. 1. q1. 0.75. 0. 90 0. 2. q2. 0. 0.45. 0. 3. q3. 0. 0.67. 0. Para lograr el modelo cinemático directo de nuestro sistema se tuvo en cuenta las características físicas del robot planteadas en la tabla anterior y haciendo un análisis basado en métodos geométricos se pudo obtener dicho modelo, el cual fue programado en Matlab, en el Anexo 1 se muestran los códigos de dicha programación. 2.2.2. Cinemática inversa.. El objetivo del problema cinemático inverso consiste en encontrar los valores que deben adoptar las coordenadas articulares del robot q = [q1 , q 2 , q3 ]. T. para que su extremo se. posicione y oriente según una determinada localización espacial. A la hora de resolver el problema cinemático inverso es mucho más adecuado encontrar una solución cerrada. Esto es encontrar una solución matemática explícita de la forma q k = f k ( x, y, z , α , β , γ ) con k = 1,2,3 . En principio es posible haciendo transformaciones inversas obtener el modelo. cinemático inverso de un robot a partir del conocimiento de su modelo directo. Sin embargo en la práctica, esta tarea no es trivial siendo en muchas ocasiones tan complejas que obliga a desecharlas. Es por eso que la solución que se le da en este trabajo esta basado en métodos geométricos, los cuales se programaron en Matlab y se pueden ver con más detalles en Anexo 2. 2.3. Modelo dinámico.. El modelo dinámico de un robot tiene como objetivo conocer la relación entre el.
(39) CAPÍTULO II. Modelación del Sistema de Control.. 28. movimiento del robot y las fuerzas implicados a el mismo. Esta relación se puede expresar matemáticamente por las coordenadas de localización de su extremo y las derivadas de la velocidad y aceleración así como las fuerzas aplicadas a sus articulaciones y por las características inherentes del robot como longitud, masa e inercia de sus elementos. Por las ecuaciones de Lagrange-Euler, en ausencia de fricción en las articulaciones y desestimando la dinámica de los actuadores y otras perturbaciones, para un manipulador rígido de n grados de libertad, el modelo dinámico resulta: && + C(q, q& )q& + g (q) τ = H (q )q. [2. 5]. q : Vector de posiciones articulares.. τ : Vector de torques aplicados a cada articulación. H (q) : Matriz de inercia. C(q, q& ) : Vector de fuerzas centrípetas y de Coriolis. g (q) : Vector de fuerzas gravitacionales.. Como se sabe todo sistema real presenta una dinámica, que en la mayoría de los casos tienen componentes desconocidos o necesitan de un trabajo muy engorroso. Tal es el caso de este trabajo donde el modelo dinámico constituye una aproximación, en el cual se desprecian los pares de torques aplicado a los actuadores (servomecanismos) para mantener el extremo del robot en una posición deseada. A pesar de esa consideración el sistema se comporta con muy buenas características garantizadas por el controlador implementado. Este tipo de controlador es un algoritmo P-PI resultado de (Rubio, 2000) que tiene muy altas prestaciones y asume las incertidumbres del modelo. En el epígrafe 2.5.3 se hace un estudio más detallado de este modelo y de su control.. 2.4. Modelo del sistema de visión.. En este trabajo se toma el sistema de visión sujeto a la herramienta del robot como se aprecia en la figura Fig. 2. 2, el cual está asociado al marco de sistema de coordenadas. ∑C.
(40) CAPÍTULO II. Modelación del Sistema de Control.. 29. y se mueve dentro del marco de sistema de coordenadas del robot, ∑ R . El origen del marco de referencia de la cámara con respecto al marco de referencia del robot es representado por R R p zcR ]T ∈ ℜ 3 . Los puntos de interés del objeto en el con coordenadas [ p xcR p yc el vector PCorg C C C T p Cyo p zo ] ∈ ℜ 3 en el espacio de trabajo son definidos como p o con coordenadas [ p xo. R R p yo p zoR ]T ∈ ℜ 3 en el sistema de sistema de referencia ∑ C , y p oR con coordenadas [ p xo. referencia ∑ R . La imagen adquirida por la cámara implica la visión de una escena 3D (espacio cartesiano del robot) a una imagen en 2D. Esta imagen pude sufrir varios tipos de procesamiento computacional para mejorar las propiedades de la imagen y extraer los rasgos de la misma. Estas características se toman a partir de la proyección en el plano de la imagen de la cámara y se considera el centro de masa del objeto esférico y su radio para identificar su posición en el espacio tridimensional. C C T p Cyo p zo ] puede ser representada en el plano La posición del objeto con coordenadas [ p xo. de la imagen como ξ ′ = [u v r ]T ∈ ℜ 3 , esto se puede apreciar en la siguiente figura.. Fig. 2. 3 Proyección del objeto en el plano de la imagen.. Las coordenadas ξ ′ = [u v r ]T ∈ ℜ 3 en el plano de la imagen se define por:.
(41) CAPÍTULO II. Modelación del Sistema de Control. C ⎡ p xo ⎤ ⎡u ⎤ λ ⎢ C⎥ ⎢ ⎥ ξ ′ = ⎢ v ⎥ = α C ⎢ p yo ⎥ p zo ⎢ ⎥ ⎢⎣ r ⎥⎦ ⎣ ro ⎦. 30. [2. 6]. Donde α es el factor de escala en píxel por metros, λ es la distancia focal del lente de la cámara y p zoC > 0 que es la distancia a la cual se va a mover el objeto respecto al robot. Para este estudio se tomaron como valores de estas constantes las consideradas por (Hernández y otros., 2005) y (Machado, 2003), quedando α = 129050 píxel / m ,. λ = 0.008m y p zoC = 1.126 m . El modelo presentado en la ecuación [2.6] es denominado modelo de la imagen. La ubicación del marco de la cámara con respecto al marco del robot se pude definir usando traslaciones y rotaciones de los respectivos sistemas coordenados, como lo demuestra la siguiente ecuación. C ⎛ ⎡ p xoR ⎤ ⎡ p xcR ⎤ ⎞ ⎡ p xo ⎤ ⎜ ⎢ C⎥ ⎢ R ⎥⎟ −1 ⎢ R ⎥ C ⎜ = − p R ( φ , θ , ψ ) p yo R yo ⎢ ⎥ ⎢ ⎥ ⎢ p yc ⎥ ⎟ ⎜ C ⎢ p zo ⎥ ⎜ ⎢ p zoR ⎥ ⎢ p zcR ⎥ ⎟⎟ ⎣ ⎦ ⎝⎣ ⎦ ⎣ ⎦⎠. [2. 7]. Donde RRC (φ ,θ ,ψ ) constituye la matriz de rotación de los ángulos de Euler, y se define como:. ⎡CφCθCψ − SφSψ R (φ , θ ,ψ ) = ⎢⎢ SφCθCψ + CφSψ ⎢⎣ − SθCψ C R. − CφCθSψ − SφCψ − SφCθSψ + CφCψ SθSψ. CφSθ ⎤ SφSθ ⎥⎥ Cθ ⎥⎦. [2. 8]. Para el desarrollo de este modelo es necesario plantear las siguientes asunciones: A. El objeto es estático. B. Existe una configuración de los valores de q para los cuales ξ ′d = ξ ′(q d ) . C. Los ejes R Z y C Z , Fig. 2. 2 son paralelos con igual dirección y sentido ψ = 0 . ~ D. El error inicial de ξ ′(0) es suficientemente pequeño. La condición A garantiza que el control de posición sea evaluado, en B se plantea que el.
(42) CAPÍTULO II. Modelación del Sistema de Control.. 31. problema de control es solucionable. En C se establece condiciones para los ángulos de Euler y en D se plantea la posibilidad de hacer un análisis lineal alrededor del punto de operación. Partiendo de las asunciones C y D proponemos evaluar las ecuaciones de modelación de la cámara, para cumplir que los ejes R Z y C Z sean paralelos, para ello se escogen los ángulos de Euler, φ = 0 , θ = 0 y ψ tiene un análisis independiente. Con ello es posible escribir la ecuación [2. 8] como:. ⎡Cψ R (φ , θ ,ψ ) = ⎢⎢ Sψ ⎢⎣ 0 C R. − Sψ Cψ 0. 0⎤ 0⎥⎥ 1⎥⎦. [2. 9]. Para el seguimiento de trayectoria se considera el punto de operación del sistema la C = 0, p Cyo = 0 y p zoC = 1.126 m , esto significa que el posición del objeto con coordenadas p xo. centro de masa del objeto va a estar en el eje óptico de la cámara y a una distancia fija de la C = 0, ∆p Cyo = 0 y ∆p zoC = 0 . Sobre la base de este misma; por lo que las variaciones ∆p xo. análisis se estableció que ψ (0) = 0 , como una condición inicial, teniendo en cuenta que el estudio se realizará a pequeñas variaciones alrededor del punto de operación, por lo que la [2. 7] se concierte en: R C ⎡δp xo ⎤ ⎡1 0 0⎤⎛ ⎡δp xo ⎤ ⎡δp xcR ⎤ ⎞ ⎜ ⎟ ⎢ C⎥ ⎢ ⎥⎜ ⎢δp R ⎥ − ⎢δp R ⎥ ⎟ = δ p 0 1 0 ⎢ yo ⎥ ⎢ ⎥⎜ ⎢ yo ⎥ ⎢ yc ⎥ ⎟ C ⎥ ⎢δp zo ⎢ ⎥⎦⎜ ⎢⎣δp zoR ⎥⎦ ⎢⎣δp zcR ⎥⎦ ⎟ 0 0 1 ⎣ ⎦ ⎣ ⎝ ⎠. [2. 10]. Para linealizar el modelo de la imagen presentado en [2. 6] es necesario hacer uso de la serie de Taylor. En esta aproximación se usaron los términos de primer orden, como se muestra a continuación.. δu = u 0 −. δv = v0 −. αλ p. C zo. αλ p. C zo. C δp xo +. δp + C yo. C αλp xo. p. C 2 zo. C αλp xo. p. C2 zo. δp zoC. [2. 11]. δp zoC. 2. 12].
(43) CAPÍTULO II. Modelación del Sistema de Control.. δr =. αλro p. C2 zo. δp zoC. 32. [2. 13]. C Como u 0 = 0 y v0 = 0 porque p xo = 0 y p Cyo = 0 respectivamente, entonces la ecuación [2.. 6] linealizada quedaría como:. ⎡δu ⎤ δξ ′ = ⎢⎢δv ⎥⎥ ⎣⎢δr ⎦⎥. ⎡ ⎤ ⎢ ⎥ C ⎢ δp xo ⎥ λ ⎢ δp Cyo ⎥ = −α ⎢ ⎥ pC zo ⎢ roδp C zo ⎥ ⎢− C ⎥ p zo ⎦⎥ ⎣⎢. [2. 14]. Si consideramos que nuestro punto de operación es el origen del vector de estado, entonces se puede escribir a la [2. 14] como: ⎤ ⎡ C ⎢ δp xo ⎥ ⎡u ⎤ ⎥ ⎢ λ ξ ′ = ⎢⎢ v ⎥⎥ = −α C ⎢ δp Cyo ⎥ p zo ⎢ C ⎥ roδp zo ⎢⎣ r ⎥⎦ ⎥ ⎢− C ⎥⎦ ⎢⎣ p zo. [2. 15]. Sustituyendo la [2. 10] en [2. 15] y los valores de las constante, se puede llegar al modelo lineal del sistema de visión. 0 0 ⎤⎛ ⎡δp xcR ⎤ ⎡δp xoR ⎤ ⎞ ⎡u ⎤ ⎡916.87 ⎜⎢ ⎥ ⎢ R ⎥⎟ ξ ′ = ⎢⎢ v ⎥⎥ = ⎢⎢ 0 916.87 0 ⎥⎥⎜ ⎢δp ycR ⎥ − ⎢δp yo ⎥⎟ ⎜⎜ ⎢ R ⎥ ⎢ R ⎥ ⎟⎟ ⎢⎣ r ⎥⎦ ⎢⎣ 0 − 40.71⎥⎦⎝ ⎣δp zc ⎦ ⎣δp zo ⎦ ⎠ 0. 2.5. [2. 16]. Controlador con realimentación visual.. De los diferentes sistemas de control servovisual analizados se escogió un control servovisual dinámico con control de movimiento, Fig. 1.14. El mismo consiste en dos lazos en cascada, uno interno donde se resuelve el control articular del robot y uno externo donde.
(44) CAPÍTULO II. Modelación del Sistema de Control.. 33. se generan las trayectorias deseadas al regulador articular usando la cámara como detector de error. Esta configuración no requiere modificar el algoritmo de control del robot permitiendo la integración del sistema de visión a manipuladores industriales sin la necesidad de modificar los controladores originales del fabricante. 2.5.1. Objetivo de control.. El objetivo de control consiste en diseñar un controlador que determine las señales mando necesarias para que al ser aplicados a las articulaciones del robot, trasladen su extremo junto con la cámara, de forma tal que la proyección del objeto, moviéndose en el espacio, sea alcanzada y seguida por la proyección de las coordenadas del objeto en el plano imagen de la cámara. O de la misma forma que las características de imagen ξ = [u v r ] del T. extremo. operativo. ξ d = [u d. vd. 2.5.2. tiendan. a. igualarse. con. las. coordenadas. en. pantalla. rd ] del objeto móvil que se desea alcanzar y seguir. T. Controlador propuesto.. Proponemos el uso de un regulador PID por cada una de las coordenadas en el plano de la imagen con el objetivo de eliminar el error entre la característica medida y el valor deseado. De esta forma el controlador externo no necesita un calibrado exacto de la cámara y asimila todas las incertidumbres del modelo. El lazo externo de nuestro sistema de control depende de las exigencias de tiempo de captura y procesamiento del sistema de visión y el lazo interno solo debe responder a las exigencias dinámicas de robot, muchos más rápidos que las del externo, producto de lo que la dinámica del lazo interno será despreciada en nuestro análisis.. 2.5.3. Control del lazo interno.. La propuesta de control presentada en la Fig. 1.14 considera un sistema de control para los lazos internos del robot, proponemos en este caso, un control desacoplado por articulaciones basado en el trabajo de (Rubio, 2000). El control desacoplado trata el control.
(45) CAPÍTULO II. Modelación del Sistema de Control.. 34. de cada articulación de forma independiente. Por lo que es necesario conocer el modelo dinámico de una articulación que coincidirá con el de su actuador pues los pares producto de la dinámica acoplada del manipulador se consideran disturbios. Cada articulación es movida con un motor de corriente directa el cual puede modelarse de la siguiente forma:. Fig. 2. 6 Modelo de los actuadores.. El controlador para cada articulación está basado en el algoritmo P-PI, que fue obtenido por (Rubio, 2000) y garantiza altas prestaciones, luego, el modelo desacoplado para el robot manipulador de tres articulaciones puede verse con más detalle en el Anexo 4. 2.5.4. Control del lazo externo.. Para el análisis del controlador externo se considera que los efectos dinámicos del lazo interno son independientes con respecto al lazo externo, por lo que se puede tomar el lazo interno como un simple control de posicionamiento y teniendo en cuenta que es mucho más rápido que el externo, no está mal plantear que: q ≅ qd. ∀t > 0. [2. 17]. Teniendo en cuenta esta consideración y el modelo del sistema de visión planteado en [2.16], el esquema de control se puede plantear como:.
Figure



+7





Documento similar
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Tejidos de origen humano o sus derivados que sean inviables o hayan sido transformados en inviables con una función accesoria.. Células de origen humano o sus derivados que
Proporcione esta nota de seguridad y las copias de la versión para pacientes junto con el documento Preguntas frecuentes sobre contraindicaciones y
[r]
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
El fenómeno del cuidado, emerge como necesidad la simbiosis entre el proceso de enfermería y su transcendencia en la investigación científica a través de la enfermería basada
