Diseño de un controlador de antena parabólica basado en el microcontrolador PIC 18F4550
106
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Diseño de un controlador de antena parabólica basado en el microcontrolador PIC 18F4550 Autor: Guillermo Melcón Jiménez. Tutor: Ing. Reibel Torres Morales Empresa de Automatización Integral CEDAI Villa Clara Santa Clara 2014 "Año 56 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Los problemas son aquellas circunstancias que vez cuando no tienes bien definido tu objetivo.. Aristóteles.
(5) ii. DEDICATORIA. Esta tesis está dedicada a las personas más especiales de mi vida, a mi familia, ellos, que han estado conmigo siempre, apoyándome para terminar mis estudios y dándome ánimos para seguir siempre adelante, pero especialmente quiero que sea para dos personas, mi padre y mi madre, mi padre porque siempre ha sido mi ejemplo, la persona que me ha enseñado lo que necesito saber y por estar siempre conmigo hasta el final sin importar las circunstancias; a mi madre, porque me que ha dado todo el cariño del mundo, porque siempre ha hecho todo por mí y por haberme dado ese apoyo espiritual que siempre necesitamos. Espero que todos mis familiares se sientan orgullosos de mi carrera y mi tesis, pues a todos ellos se la dedico..
(6) iii. AGRADECIMIENTOS. Mis agradecimientos son para muchas personas, todas las que me han ayudado y de alguna forma han formado parte de mi preparación y bienestar en la universidad, a profesores, compañeros de clases, mis amigos, en especial a Norlen que es sin duda de los mejores, al Wao, Gabriel, el Dany, Ernesto, Tirado, Leandro, Xavi, Carlos, las químicas, a Nailena y a Lianet, a mis amigos del pueblo a Marlon y al Lachi, y a todos, que son muchos, gracias por ser mis amigos. Le agradezco al tutor por su paciencia, su apoyo y su esfuerzo, aún más en los últimos días. A mi padre que me ha apoyado durante toda la carrera y lo ha hecho mucho más durante mi tesis, por haberme ayudado a mejorar mi preparación profesional y por ser el gran padre que es. A mi madre que es la mejor madre del mundo, que me apoya y sé que lo hará siempre incondicionalmente. A mi hermana por ser la que siempre me hace reír y la que siempre se preocupa por todos..
(7) iv. TAREA TÉCNICA. 1. Análisis bibliográfico de la literatura más actualizada relacionada con el funcionamiento de controladores de antenas parabólicas. 2. Selección del objeto tecnológico. 3. Diseño y cálculo de los diferentes módulos circuitales del controlador de antena parabólica. 4. Programación del firmware del controlador de antena parabólica. 5. Simulación del dispositivo. 6. Redacción del informe final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La presente investigación tiene como objetivo arribar a un diseño sencillo y funcional de un controlador de antena parabólica basado en microcontroladores PIC, y explotar las características de estos dispositivos usándolo como unidad central de control para lograr una arquitectura capaz de realizar las funciones y algoritmos requeridos. El diseño implementa la característica de realizar movimientos simultáneos, en azimut y elevación, y la posibilidad de incorporarle algoritmos de control de posición a través de los puentes H, haciendo uso de las realimentaciones obtenidas de los sensores de los actuadores. Para el diseño de los circuitos fue necesario estudiar a profundidad, las características y requisitos necesarios de un puente H para lograr controlar un motor de corriente directa de una manera efectiva, haciendo uso de las señales de los sensores internos de los actuadores aunque no se implementa en el software el control de velocidad (recomendación para las nuevas versiones), y solo se maneja en régimen on/off, es decir de encendido y apagado. También se tuvo en cuenta el sensado de corriente en el circuito de accionamiento de los actuadores para proteger la fuente principal en caso de sobre carga de los mismos. Finalmente se arriba a un diseño exitoso, donde se logra una arquitectura óptima en cuanto a recursos circuitales y funcionamiento, con la posibilidad de incorporar mejoras en el firmware en versiones posteriores..
(9) vi INDICE. PENSAMIENTO .................................................................................................................. i DEDICATORIA .................................................................................................................. ii AGRADECIMIENTOS....................................................................................................... iii TAREA TÉCNICA ........................................................................................................... iv RESUMEN ....................................................................................................................... v INTRODUCCIÓN ............................................................................................................. 1 CAPÍTULO 1.. INTRODUCCION A LOS CONTROLADORES DE ANTENAS. PARABOLICAS. 3 1.1. Posicionamiento de satélites artificiales. ......................................................... 4 1.2. Controladores de antenas parabólicas............................................................ 6 1.3. Controladores que se venden en el mercado. ................................................ 7 1.3.1. Controlador de 2 ejes RC2000.................................................................. 7. 1.3.2. Intrac 305-505-605. .................................................................................... 8. 1.3.3. Sistema Satelital de Control de Seguimiento de Antena ATX-3000. .. 11. 1.3.4. Sistema de Control de Antena Modelo 950. .......................................... 12. 1.3.5. Controlador iNetVu 7000/7024................................................................ 12. 1.4. Clasificación de actuadores de controladores de antenas parabólicas. .... 15 1.5. Sensores más usados en los actuadores de controladores de antenas parabólicas. ................................................................................................................ 18 1.5.1. Encoder. .................................................................................................... 19. 1.5.2. Sensor efecto hall. .................................................................................... 20. 1.5.3. Sensor Reed Switch................................................................................. 21.
(10) vii 1.6. Selección de los actuadores para el control de la antena y de la tecnología de control. ................................................................................................................... 22 1.7. Consideraciones finales. ................................................................................. 23 CAPÍTULO 2.. DISEÑO. CIRCUITAL. Y. PROGRAMACION. DEL. CONTROLADOR DE ANTENA PARABOLICA .......................................................... 24 2.1. Caracterización del objeto tecnológico.......................................................... 25. 2.1.1 2.2. Diseño de la fuente de alimentación para el equipo. ................................... 26. 2.2.1 2.3. Caracterización de las variables a manejar en el sistema ................... 25. Fuente de alimentación 12 VDC. ............................................................ 27. Diseño del circuito de accionamiento eléctrico para el mando de los. actuadores de acimut y elevación. ........................................................................... 34 2.3.1. Diseño de un puente H como circuito de accionamiento ......................... 35. 2.3.2. Diseño del circuito de protección de sobre corriente de los actuadores 37. 2.4. Diseño de la tarjeta principal. ......................................................................... 40. 2.6. Consideraciones de diseño hacer circuito de señales digitales. independiente de los analógicos. ............................................................................. 51 2.7. Descripción del funcionamiento del software. .............................................. 52. CAPÍTULO 3.. SIMULACIÓN Y ANALISIS DE LOS MODULOS CIRCUITALES. DISEÑADOS. 54. 3.1 Análisis de los resultados. .................................................................................. 54 3.1.1 Software de simulación Proteus. .................................................................... 54 3.2. Análisis de la fuente de alimentación para actuadores. .............................. 56 3.3. Análisis de la fuente de alimentación para los circuitos electrónicos. ........ 59 3.4. Análisis del circuito de accionamiento eléctrico para mando a los actuadores. ................................................................................................................. 62.
(11) viii 3.5. Análisis del circuito de protección de sobre corriente de los motores de los actuadores. ................................................................................................................. 63 3.6. Análisis del circuito de acondicionamiento de la señal. ............................... 66 3.7. Hardware del controlador de antena parabólica. ......................................... 68 3.8. Consideraciones finales. ................................................................................. 69 CONCLUSIONES Y RECOMENDACIONES ............................................................. 70 CONCLUSIONES ...................................................................................................... 70 RECOMENDACIONES ............................................................................................. 71 REFERENCIAS BIBLIOGRÁFICAS ............................................................................ 72 ANEXOS ......................................................................................................................... 74 Anexo II Controlador de antenas parabólicas pertenecientes al fabricante Advantech Wireless ................................................................................................... 75 Anexo III. Especificaciones técnicas de los controladores de antenas. satelitales INTRAC 305 y 505 .................................................................................. 76 Anexo IV. Controlador de antena satelital “Control de Seguimiento de Antena. Modelo ATX-3000”..................................................................................................... 78 Anexo V Controlador de antena satelital “Sistema de Control de Antena Modelo 950” ............................................................................................................................. 78 Anexo VI Antena del ICRT con posicionamiento manual y sin instalar. .............. 80.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. La principal motivación que ha propiciado la presente investigación es la carencia de controladores de antenas parabólicas existentes en el ICRT (Instituto Cubano de Radio y Televisión), y el alto costo de los mismos en el mercado internacional. En la actualidad se cuenta con un solo equipamiento para el control de posición de una de las antenas instaladas (Anexo I). De acuerdo a las características de trabajo de este centro, el cambio de posición de una antena hacia otro satélite se realiza con cierta frecuencia y se ejecuta por el personal especializado del lugar, de manera manual. De acuerdo a todo lo anterior planteado se arriba a la siguiente problemática de investigación:. ¿Qué estructura circuital permite controlar el movimiento de una antena parabólica?. Para dar solución a esta interrogante se planteó el siguiente objetivo general:. Diseñar un controlador de antena parabólica basado en el microcontrolador PIC18F4550.. Como estrategia para darle cumplimiento al objetivo principal de la tesis se han planteado los siguientes objetivos específicos: . Caracterizar controladores de antenas parabólicas de varios fabricantes.. . Evaluar las diferentes tecnologías existentes.. . Diseñar los diferentes módulos que componen el controlador de antena parabólica.. . Programar el firmware de operación del dispositivo.. . Comprobar el correcto funcionamiento de los circuitos diseñados mediante la simulación de los mismos..
(13) INTRODUCCIÓN. 2. En el desarrollo de la investigación ha sido posible la revisión bibliográfica actualizada del tema dado la diversidad de fabricantes de estos dispositivos y el amplio campo de aplicaciones que tienen. Fue necesaria la consulta de temas muy específicos de electrónica, consulta de hojas de datos de componentes electrónicos y actuadores.. Como contribución del presente trabajo se propone crear un diseño funcional y de recursos mínimos de hardware que explote la versatilidad y sencillez de los microcontroladores, para lo cual se presenta la siguiente organización del informe:. Organización del informe El trabajo está segmentado en tres capítulos, conclusiones, recomendaciones, bibliografía y anexos con la siguiente estructura:. CAPÍTULO1: Se analizarán los elementos básicos referentes a las características de los controladores de antenas parabólicas que existen en el mercado, así como los tipos de actuadores empleados para el movimiento de las antenas y los sensores más comunes que poseen dichos actuadores.. Capítulo 2: Se realizará el diseño y análisis de los diferentes módulos circuitales del dispositivo, así como la programación del software para su correspondiente control.. Capítulo 3: Se simulará el funcionamiento de los circuitos diseñados en el software Proteus utilizando las herramientas que éste nos brinda, comentando brevemente el resultado del análisis de cada circuito..
(14) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 3 ANTENAS PARABÓLICAS.. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE ANTENAS PARABOLICAS.. Las antenas parabólicas tienen como función la radiación o la recepción de ondas electromagnéticas, su elemento reflector parabólico concentra la energía en el punto focal, obteniendo así, su característica de transmisión o recepción unidireccional según sea su aplicación. [1]. Los tipos de satélites según sus órbitas son satélites LEO (Low Earth Orbit, que significa órbitas bajas), satélites MEO (Medium Earth Orbit, órbitas medias), satélites HEO (Highly Elliptical Orbit, órbitas altas). Los satélites GEO (órbita alta) son los llamados geoestacionarios, siendo interés de nuestro trabajo desarrollar un dispositivo que se posicione a este tipo de satélite. Estos satélites describen órbitas sobre el Ecuador, con la misma velocidad angular que la Tierra. En consecuencia, los satélites geosíncronos llamados también estacionarios o geoestacionarios, parecen estar en un lugar fijo sobre un punto en la superficie terrestre, debido a ello, no se necesita equipo especial de antenas de rastreo; las antenas de las estaciones terrestres solo apuntan al satélite en forma permanente. Un solo satélite geosíncrono de gran altitud puede proporcionar comunicaciones confiables a aproximadamente a un 40% de la superficie terrestre. [2] Hay varios requisitos para los satélites en orbitas geoestacionarias. Deben tener un ángulo de inclinación de 0°, es decir, que el satélite debe estar en órbita directamente en el plano ecuatorial de la Tierra. EI satélite también recorre su órbita en la misma dirección que la rotación de la Tierra (hacia el este), con la.
(15) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 4 ANTENAS PARABÓLICAS. misma velocidad angular (de rotación): una revolución por día. Estos satélites se encuentran a una distancia fija aproximadamente de 35.800 km sobre el Ecuador. [2] Algunas de las aplicaciones de estos dispositivos se destinan a emisiones de televisión, telefonía, transmisión de datos a larga distancia y difusión de datos meteorológicos. 1.1. Posicionamiento de satélites artificiales. El Ecuador o divide la Tierra en el hemisferio Norte y el hemisferio Sur, y el meridiano de Greenwich divide la Tierra en Este y Oeste. Las divisiones paralelas al Ecuador se denominan Paralelos, y el ángulo considerado se llama Latitud, bien Norte o bien Sur, según sea del hemisferio Norte o del hemisferio Sur. Las divisiones alrededor de Greenwich se denominan Meridianos, y el ángulo considerado se llama Longitud, bien Este o bien Oeste.. Figura 1.1 Localización espacial de un satélite. (Tomado de http://www.inele.ufro.cl/apuntes/Redes_de_Banda_Ancha/Tarea_1/Eduardo_Palac ios_-_Acceso_Satelital_DTH_%28Trabajo_Escrito%29.pdf).
(16) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 5 ANTENAS PARABÓLICAS. El Acimut indicará el punto exacto en el que debemos fijar la antena en el plano horizontal. Este ángulo se mide desde el norte geográfico en sentido de las agujas del reloj. Hay que tener en cuenta que el polo norte geográfico, utilizado como referencia en todos los mapas, es consecuencia de la división imaginaria del globo terráqueo en diferentes gajos (husos) a través de los meridianos. El punto de intersección de todos ellos da lugar a los polos Norte y Sur, por los que pasa el eje de giro de la Tierra. El polo norte magnético es el punto de la superficie terrestre que atrae el extremo rojo de la aguja de la brújula. El ángulo de elevación nos indicará la inclinación que le debemos dar a la antena con respecto al plano vertical para orientarla hacia el satélite (Figura1.1). El ángulo del plano de polarización se ajusta girando el conversor, respecto a la vertical en el sentido de las agujas del reloj. Este ángulo, igualmente, vendrá determinado por la ubicación geográfica de la antena. En la Figura 1.2 se aprecia algunos satélites y su ubicación respecto al meridiano cero y en la Figura1.3 se muestra la información online que brinda el operador de un satélite que puede ser consultada por cualquier usuario de internet..
(17) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 6 ANTENAS PARABÓLICAS. Figura 1.2 Ejemplo de datos de ubicación de satélites (tomado de: http://www.portaleds.com/espanol/).. Figura 1.3 Datos del Satélite SES 4 (tomado de http://www.ses.com/4628467/ses4). 1.2. Controladores de antenas parabólicas. Los controladores de antenas parabólicas son empleados en disímiles aplicaciones, la función principal de estos equipos es la de mover la antena para su correcta ubicación y ubicar al satélite con que se establece el enlace. Algunos de estos dispositivos son compatibles, específicamente con un satélite o con un conjunto de ellos, los satélites previamente están guardados en una tabla, gracias a un sistema de guardado en memoria de la posición de estos, el usuario puede seleccionar con cuál de ellos va a localizar. Algunos tienen detector de baliza y pueden localizar y corregir la posición de los satélites automáticamente. Los posicionadores de antenas parabólicas le permiten a la antena cubrir un área determinada, la cual estará determinada por la inclinación que los actuadores le permitan dar a la antena. Una característica que poseen estos equipos consiste en.
(18) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 7 ANTENAS PARABÓLICAS. poseer uno o varios sectores de trabajo donde pueden localizar un número determinado de satélites. 1.3. Controladores que se venden en el mercado. 1.3.1 Controlador de 2 ejes RC2000. Los equipos de posicionamiento de antenas parabólicas son empleados en aplicaciones específicas. En Cuba estos se utilizan en el Instituto Cubano de Radio y Televisión, con el fin de recibir y transmitir señales satelitales hacia otros países. Equipos que se han utilizado y se utilizan son los que pertenecen a la familia RCI (Research Concepts, Inc). El RC2000 es un controlador de antena de seguimiento de satélites de órbita inclinada, el cual está disponible en varias versiones y ha sido fabricado por RCI. [3] El RC2000C y el RC2000A son controladores de antena de doble eje con características muy similares, los cuales están diseñados para interactuar con las antenas controladas por actuadores de 36 VDC. El RC2000C está disponible en un número de diferentes configuraciones dependiendo de las antenas y tipo de montaje. En el caso del RC2000C está diseñado para trabajar con antenas que emplean elevación sobre soportes tipo acimut. El RC2000 POLAR está diseñado para trabajar en un montaje de elevación motorizada (ángulo de latitud), ajuste de la declinación. El RC2000 EL / AZ está diseñado para acimut sobre soportes de tipo de elevación. Este controlador está capacitado para monitorear la intensidad de la señal recibida a través de las entradas analógicas de Control Automático de Ganancia. Las entradas del controlador de Control Automático de Ganancia aceptan una tensión de DC, de 0 a 10 V. Los controladores pueden ser programados para aceptar tensiones del Control Automático de Ganancia de cualquier polaridad: las entradas de Control Automático de Ganancia de polaridades positivas aumentan en magnitud al aumentar el nivel de señal recibido, mientras que las entradas de Control Automático de Ganancia polaridad negativa disminuyen en magnitud el nivel de señal recibido..
(19) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 8 ANTENAS PARABÓLICAS. Características: . Facilidad de instalación.. . Interfaz para el usuario basada en una pantalla de cristal líquido de 2 líneas y 40 columnas y un teclado de 16 teclas.. . Opera con dos velocidades entregando 8 ADC de corriente con 36 VDC a los actuadores.. . El control de velocidad es lento y preciso, se implementa por software, midiendo el rango de los pulsos llegados al controlador y ajusta el voltaje aplicado al actuador para que mantenga un movimiento constante.. . Interfaces con sensores de posición basadas en Reed Switch, efecto hall u óptico.. . Interfaz serie RS-422 que es compatible con la especificación de Bus SA.. . Montajes en 2 unidades rack, con entrada de alimentación seleccionable entre 115 y 230 VAC.. . Memoria no volátil que conserva los datos de la posición del satélite. El RC2000A puede guardar los datos de localización para 50 satélites geoestacionarios. El RC2000C puede guardar los datos de 35 satélites, 5 de los cuales pueden ser de órbita inclinada. [4]. 1.3.2. Intrac 305-505-605.. Estos tres tipos de controladores de antenas son fabricados por Advantech Wireless, son utilizados para controlar antenas de gran tamaño. Advantech Wireless, es una empresa que utiliza las comunicaciones inalámbricas satelitales y terrestres. Advantech Wireless es también un líder mundial en el área de sistemas de control de la antena. La industria utiliza transductores de posición estándar y un algoritmo de reconocimiento de patrones sofisticados para confirmar y refinar la información de comunicación con satélites visibles. [5] La Figura 1 y 2 del Anexo II, muestran los controladores de antenas satelitales de INTRAC 305 y 505 respectivamente. características de las series 305, 505 y 605.. A continuación se muestran las.
(20) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 9 ANTENAS PARABÓLICAS. INTRAC-305 . Alto rendimiento, alta fiabilidad controlador para la gama completa de antenas AndrewTM con diámetro de hasta 9,3 metros.. . Manejo simultáneo de doble eje.. . El algoritmo de modelado de órbita INTRACTM, ofrece una alta integridad de seguimiento.. . Un seguimiento preciso de satélites con inclinaciones orbitales de 10° mínimo.. . Degradación del medio de la señal de seguimiento, menor de 0,1 dB.. . Interfaces directamente a los gabinetes de unidad AndrewTM (control de eje dual simultánea).. . Compatible con los satélites INTELSAT y EUTELSAT.. . Tolera fluctuaciones de la señal.. . Resistente al seguimiento de la pérdida de señal, manteniendo la integridad por hasta 72 horas.. . Memoria no volátil, garantizando que el seguimiento se reanude después de una falla de alimentación.. . Control total a través de las interfaces RS232 y RS422. [6] - INTRAC-505. . Alto rendimiento, alta fiabilidad controlador para la gama completa de antenas AndrewTM con diámetro de hasta 35 metros.. . Manejo simultáneo de doble eje.. . El algoritmo de modelado de órbita INTRACTM, ofrece una alta integridad de seguimiento.. . Un seguimiento preciso de satélites con inclinaciones orbitales de 10° mínimo.. . Degradación del medio de la señal de seguimiento, menor de 0,05 dB.. . Interfaces directamente a los gabinetes de unidad AndrewTM (control de eje dual simultánea).. . Compatible con los satélites INTELSAT y EUTELSAT.. . Tolera fluctuaciones de la señal..
(21) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 10 ANTENAS PARABÓLICAS. . Resistente al seguimiento de la pérdida de señal, manteniendo la integridad por hasta 72 horas.. . Memoria no volátil, garantizando que el seguimiento se reanude después de una falla de alimentación.. . Control total a través de las interfaces RS232 y RS422. [7] - INTRAC-605. . El Controlador Inteligente de seguimiento de antena, INTRAC-605, es un controlador basado en microprocesador para el seguimiento de un satélite geoestacionario incluidos los de baja elevación o con altos ángulos de inclinación.. . El INTRAC-605 se basa en un modelo de algoritmo matemático utilizando en el seguimiento del satélite. Para construir el modelo de seguimiento, INTRAC realiza mediciones alterando el ángulo de orientación de la antena muy ligeramente y monitoreando el cambio en la intensidad de la señal de baliza recibida. Estos pequeños movimientos permiten al equipo estimar la posición del satélite y esta estimación es usada por el algoritmo de modelado.. . Las mediciones periódicas realizadas por INTRAC aseguran que los cambios en la órbita debido a las maniobras de mantenimiento de la estación u otras causas sean identificadas. El modelo se modifica y se refina para incorporar estos cambios y el seguimiento preciso se mantiene automáticamente. INTRAC aumentará automáticamente la velocidad de medida si es necesario, con el fin de obtener información suficiente sobre la órbita cambiante.. . A medida que INTRAC sigue usando su modelo de seguimiento de órbita, continuará el seguimiento del satélite si la señal de rastreo se degrada o se pierde. La posición del satélite se puede predecir con precisión durante un máximo de 72 horas sin una señal de rastreo.. . El sistema de INTRAC ofrece este rendimiento de seguimiento excepcional de los satélites con cualquier inclinación, en cualquier ángulo de visión e incluso en la presencia de degradación de la señal de baliza de forma totalmente automática. No se requiere la intervención del operador o de ajuste de parámetros cuando se cambian las condiciones o satélites. [8].
(22) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 11 ANTENAS PARABÓLICAS. Las especificaciones generales de INTRAC 305 y 505 es muestran en la Tabla 1 y 2 del Anexo III respectivamente. 1.3.3 Sistema Satelital de Control de Seguimiento de Antena ATX-3000. El Sistema Satelital de Control de Seguimiento de Antena Modelo ATX-3000: este es un sistema de posicionamiento inteligente basado en microprocesador, fácil de usar para hacer un seguimiento fiable de satélites de órbita inclinada, se emplea como un posicionador para satélites geoestacionarios con memorias de hasta 99 satélites. En la Figura 3 del Anexo IV se muestra el posicionador satelital ATX3000. Está fabricado por Satcom Resources. Características ATX-3000. . Posicionador totalmente programable con memoria para hasta 99 satélites.. . Picos más estrechos y de menos pérdidas. Mejor rendimiento.. . Control remoto completo. Control de posición de antenas desde cualquier lugar del mundo.. . Modo de mal tiempo. Rendimiento mejorado durante los eventos de FWx.. . Calibración automática de acimut y elevación equivalente a 0,01 grados.. . Alta resolución sin escobillas para realimentación de posición.. . Interfaz de control RS-232/422/485 y Ethernet en el panel frontal (seleccionable).. . M & C software de interfaz de monitoreo con eventos desencadenados, funciones de alarma y notificaciones de correo electrónico a su ordenador portátil, teléfono celular o PDA.. . Configuraciones de CA y CC disponibles.. Con el software de monitoreo y control que se ha añadido, se logra un completo control de la antena. También permite el control remoto de múltiples antenas o posicionamiento correcto e instantáneo de la misma sin tener que viajar al sitio donde ésta se ubique, sin importar si se trata de 1 ó 10,000 millas de distancia. (6).
(23) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 12 ANTENAS PARABÓLICAS. 1.3.4 Sistema de Control de Antena Modelo 950. . El Sistema de Control de Antena Modelo 950 es fabricado por General. Dynamics SATCOM Technologies, este es un proveedor de productos y servicios satelitales y de comunicaciones inalámbricos para el video, la voz y los datos a nivel mundial. [9] Este equipo se puede usar con casi cualquier antena de movimiento limitado para aplicaciones de rastreo satelital de precisión. El sistema consta de una unidad de control de antena (ACU), Unidad Receptora de Seguimiento (TRU por sus siglas en inglés) y una unidad de accionamiento de energía (PDU por sus siglas en inglés) que están vinculados a través de conexiones Ethernet dedicados. Este posee las funciones de control siguientes: . Trabaja con motores de corriente alterna (por eje) para la antena.. . Simple o Doble, las unidades de motor de antena multi velocidad.. . Seguimiento de satélites GEO, estables o inclinadas.. . Funcionamiento multi-banda.. Unidad de Control de Antena: La unidad de control de la antena (ACU) es el punto de la interfaz de control y monitor principal para todo el sistema, con procesamiento integrado y una interfaz de ventana de pantalla táctil amigable. En la Figura 4 (a y b) del Anexo VI se muestra el controlador de antena satelital “Sistema de Control de Antena Modelo 950”. Características de la ACU: . Proporciona un seguimiento de alto rendimiento de los satélites de órbita estable o inclinada con adaptación y modo de ajustado de efemérides de autoaprendizaje (reloj de tiempo real).. . Pantalla táctil de fácil operación.. . Pantalla informativa con lecturas de color de texto completo.. . Supervisión de diagnóstico extensivo y capacidades de prueba.. . Antena y simuladores de satélite.. . Supervisión de control de enlace (Ethernet, TCP / IP o RS-232/422).. Opciones de la ACU:.
(24) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 13 ANTENAS PARABÓLICAS. . Sincronización de la hora a través de NTP.. . Receptor de seguimiento interno en 2RU ACU analógica o digital con analizador de espectro.. . ACU Opcional 6RU con pantalla LCD táctil capacitiva de 15 pulgadas.. . Controladores Dual Ethernet en 6RU ACU.. Este sistema de control de antena posee una unidad de mantenimiento portátil, Figura 5 Anexo V. La Unidad de Mantenimiento Portable (PMU) proporciona comandados de control manuales de todos los ejes, y posee las siguientes características: . Unidad de mano robusta con un cable colgante de 50 pies para la operación local en la antena.. . Copia de seguridad de los medios de antena en movimiento y ACU independiente.. . Los modos incluyen cambiar la posición y velocidad, alto o bajo (Hi / Lo).. . Cajas de conexiones resistentes a la intemperie, con acceso a ubicaciones ventajosas de la antena.. . Activar / Desactivar por eje.. Este sistema también posee una Unidad de Control Manual (MCU), Figura 6 Anexo IV, el cual proporciona manualmente el control bidireccional de todos los ejes. Este posee las siguientes características: . Chasis delgado, 1RU.. . Funcionalidad de PMU.. En general el sistema ofrece opciones de enlaces de fibra óptica ACU-PDU, PDU de acero inoxidable, rangos de temperatura extendidos, garantía extendida, alto nivel de supresión de la EMI, PDU configurables para diferentes tamaños de motores y controles de polarización. Las especificaciones técnicas y de trabajo se muestran en la Tabla 3 del Anexo IV. [10] 1.3.5 Controlador iNetVu 7000/7024. Fabricado por C-COM Satellite System Inc., éste fue creado en 1997 y es un líder en el desarrollo y el despliegue de antenas instaladas en vehículos, así como otras tecnologías de VSAT para la entrega de servicios de Internet de banda ancha, para.
(25) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 14 ANTENAS PARABÓLICAS. aplicaciones móviles y fijas a nivel mundial. C-COM ha merecido una serie de premios y reconocimientos por la excelencia de su tecnología. [11] Este controlador de antenas parabólicas posee las características siguientes: Características: . Panel frontal configurable.. . Compatible con todas las plataformas móviles iNetVu.. . Compatible con DVB-S1 y frecuencias DVB-S2/ACM.. . Óptimo, de alta precisión para el seguimiento de la antena.. . Acceso remoto y movimiento de protección para seguridad.. . Compatible con los satélites de órbita inclinada.. . Integrado con módems múltiples.. . Funciona con el Sistema de Navegación GLONASS y GPS.. . Posicionamiento Global de Información disponible para dispositivos externos.. . Idiomas soportados por interfaces GUI: Inglés, ruso, chino (mandarín tradicional) y español.. Receptor de baliza (opcional): el montaje en rack de 19'' de un receptor de baliza (BR300L) está disponible y viene integrado para trabajar con el controlador iNetVu. Este componente externo detecta la densidad de potencia de la baliza del satélite (930MHz – 2300MHz) y está conectado al controlador mediante una interfaz de puerto serie RS232. Otras características del controlador iNetVu 7000/7024: . Se puede operar desde una aplicación de PC mediante el puerto USB.. . A través de su interfaz web, puede ser operado de forma remota o localmente a través de una conexión de red.. . Puede ser configurado desde el panel frontal con un menú de configuración protegido por contraseña.. . Protege la plataforma y sus componentes del daño, utilizando los niveles adecuados de señales y las lecturas de los sensores.. . Funciona correctamente incluso cuando se mueve, sin importar que esté en un plano inclinado (en cualquier dirección)..
(26) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 15 ANTENAS PARABÓLICAS. . Puede buscar, tanto portadores DVB-S como DVB-S2/ACM.. . Compatible con control automático y manual de la Plataforma iNetVu.. . Permite a los usuarios seleccionar entre varios niveles de velocidad, tanto en azimut como en elevación.. . Permite que el sistema funcione sin vigilancia en lugares remotos.. . Es capaz de cargar la información guardada en el registro (máximo de 12 horas) desde el controlador al PC para solucionar problemas.. . Soporta un seguimiento completo de los satélites de órbita inclinada por intensidad de la señal.. . Es capaz de alimentar el LNB con voltajes entre 13 y 21 VDC (seleccionable por software).. . Proporciona la opción de guardar la configuración a un archivo que se puede utilizar para configurar los controladores adicionales con los mismos parámetros de configuración.. . Soporta tanto GPS como el Sistema de Navegación Satelital GLONASS.. . Diseñado y fabricado bajo los estándares de calidad y fiabilidad de C-COM.. . Compatible con todas las plataformas de antenas iNetVu. (14). 1.4. Clasificación de actuadores de controladores de antenas parabólicas. Los actuadores, en función de la energía que transformen, los podemos clasificar en: . Eléctricos.. . Neumáticos.. . Hidráulicos.. . Térmicos.. . Elásticos.. . Gravitatorios.. Fundamentalmente en las máquinas modernas, los de mayor utilización son los eléctricos, los neumáticos y los hidráulicos. Los actuadores hidráulicos se emplean cuando lo que necesitamos es potencia, y los neumáticos para simples.
(27) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 16 ANTENAS PARABÓLICAS. posicionamientos, sin embargo, los hidráulicos requieren equipos voluminosos para el suministro de energía, así como de un mantenimiento periódico, por otro lado, las aplicaciones de los modelos neumáticos son limitadas desde el punto de vista de la precisión y el mantenimiento. Los actuadores eléctricos no requieren de mantenimientos y tienen una gran aplicabilidad, son muy utilizados en los aparatos mecatrónicos, como por ejemplo: brazos robóticos, etc.[12] En la siguiente tabla se resumen las principales características de estos tres tipos de actuadores, como son la energía que utilizan, las opciones de su utilización, sus ventajas y sus desventajas: Tabla. 1.. Clasificación. de. los. actuadores. más. utilizados.. (tomado. de. http://www.uhu.es/rafael.sanchez/ingenieriamaquinas/carpetaapuntes.htm/Apuntes %20Tema%206%20nuevo%20formato.pdf). Utilización de los actuadores eléctricos. Los actuadores eléctricos son los más extendidos y los que poseen un mayor campo de aplicación dada la fácil disponibilidad de la energía eléctrica a través de las redes de distribución, además son altamente versátiles debido a que se utilizan cables eléctricos para transmitir señales de control y la alimentación, por lo que prácticamente no hay restricciones respecto a la distancia entre la fuente de poder.
(28) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 17 ANTENAS PARABÓLICAS. y el actuador, de hecho, hay actuadores que dependen de una etapa previa realizada por un accionamiento eléctrico, como son los actuadores neumáticos o hidráulicos. Existe una gran cantidad de modelos y es fácil utilizarlos con motores eléctricos estandarizados según la aplicación. [12] Los actuadores eléctricos se clasifican en: 1- Motores de corriente alterna: . Monofásicos.. . Trifásicos.. 2- Motores de corriente directa: . Bobinados en derivación.. . Bobinados en serie.. . Excitación independiente.. 3- Motores paso. 4- Servomotores. 5- Motor universal. Existen dos tipos de actuadores eléctricos: los lineales y los rotatorios. Los actuadores lineales generan una fuerza en línea recta, tal como haría un pistón. Los actuadores rotatorios generan una fuerza rotatoria, como lo haría un motor eléctrico. Actuador rotatorio eléctrico: para hacer funcionar el actuador eléctrico, se debe energizar los bornes correspondientes para que el motor actúe en la dirección apropiada. Usualmente vienen con un controlador local o botonera que hace este proceso más sencillo. Sin embargo para la automatización remota del actuador, se debe considerar el diagrama de cableado que viene con el actuador. Las conexiones deben considerar fuerza, señales de límites de carrera y torque, señales análogas o digitales de posición y torque, etc. El torque generado por el motor eléctrico es aumentado por un reductor interno o externo para dar salida al torque final en el tiempo seleccionado. Esta es la razón por la que los actuadores eléctricos toman más tiempo en recorrer la carrera que los neumáticos o hidráulicos..
(29) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 18 ANTENAS PARABÓLICAS. Actuador linear eléctrico: los actuadores lineales industriales son productos de accionamiento eléctrico que operan en aplicaciones de lazo abierto alimentadas con 12, 24, 36 VDC o 115, 230, 400 VAC. Un actuador lineal resulta excelente para equipos agrícolas, de construcción, de minería e industriales para controlar asientos, capós, puertas, cubiertas, aceleradores y muchos otros dispositivos. Los actuadores. lineales. son. ideales. para. equipos. médicos,. de. salud. y. acondicionamiento físico, de oficina, entretenimiento y marítimos. Los actuadores lineales eléctricos pueden ser de diseños diferentes, por ejemplo, la serie Electrak del fabricante LINAK, utiliza una varilla de empuje que puede alcanzar hasta 914 mm (36 pulgadas) de longitud con capacidades de fuerza de carga dinámica de hasta 6800 N (1500 lbs). Los actuadores lineales tipo columna de izamiento son unidades de izamiento auto portantes que se utilizan principalmente en entornos médicos y de oficina, como sillas dentales, mesas de computadora ajustables, sillas de ruedas y equipos para acondicionamiento físico. Los deslizadores de actuadores lineales sin varilla vienen en unidades verticales u horizontales que incorporan un diseño de ranura en T para aplicaciones laterales tipo carro, incluidos equipos médicos y de oficina, donde se requiere el izamiento de cargas laterales. Los actuadores lineales de precisión son actuadores eléctricos cilíndricos que operan en sistemas de AC de lazo cerrado con control de transmisión. La serie ECT de actuadores lineales está específicamente diseñada para aplicaciones con varilla de empuje de alta precisión donde las capacidades de alta velocidad y alta fuerza son primordiales. Las opciones de motor actuador eléctrico incluyen servomotor de AC trifásico y motor de inducción trifásico con correa paralela, engranaje paralelo o montaje en línea de transmisión directa. [13] 1.5. Sensores más usados en los actuadores de controladores de antenas parabólicas. Muchos de los actuadores que se fabrican en la actualidad poseen internamente uno o varios sensores que son usados por los controladores para lograr.
(30) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 19 ANTENAS PARABÓLICAS. movimiento con precisión. Los sensores son los encargados de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Para ello se usan diferentes tipos de sensores dependiendo de la naturaleza de la variable física que se desee tratar: -. De contacto: son los llamados fines de carrera (o finales de carrera). Se trata de un interruptor que consta de una pequeña pieza móvil y de una pieza fija que se llama NA, normalmente abierto, o NC, normalmente cerrado.. -. Ópticos: Detectan la presencia de un cuerpo u objeto que interrumpe el haz de luz que le llega al sensor.. -. Térmicos: Se trata de resistencias cuyo valor asciende con la temperatura (termistor PTC) o bien disminuye con la temperatura (termistor NTC).. -. De humedad: dos cables sin recubrimiento van a conducir una pequeña cantidad de corriente si el ambiente es húmedo, si colocamos un transistor en zona activa que amplifique esta corriente tenemos un detector de humedad.. -. Magnéticos: detecta los campos magnéticos que provocan los imanes o las corrientes eléctricas. El principal es el llamado interruptor Reed; consiste en un par de láminas metálicas de materiales ferromagnéticos metidas en el interior de una cápsula que se atraen en presencia de un campo magnético, cerrando el circuito.. -. Infrarrojos: son diodos capaces de emitir luz infrarroja y transistores sensibles a este tipo de ondas y que por lo tanto detectan las emisiones de los diodos, lo que hará que el transistor conduzca.. -. También los hay de otros tipos: Inductivos, capacitivos, fotoeléctricos, ultrasónicos, encoders, fotoceldas, etc.. 1.5.1 Encoder. Los encoders son sensores que generan señales digitales en respuesta al movimiento, están disponibles en dos tipos, uno que responde a la rotación, y el.
(31) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 20 ANTENAS PARABÓLICAS. otro al movimiento lineal. Cuando son usados en conjunto con dispositivos mecánicos tales como engranes, ruedas de medición o flechas de motores, estos pueden ser utilizados para medir movimientos lineales, velocidad y posición. Los encoders están disponibles con diferentes tipos de salidas, uno de ellos son los encoders incrementables, que generan pulsos mientras se mueven, se utilizan para medir la velocidad, o la trayectoria de posición, el otro tipo son los encoders absolutos que generan multi-bits digitales, que indican directamente su posición actual. Los encoders pueden ser utilizados en una gran variedad de aplicaciones. Actúan como transductores de retroalimentación para el control de la velocidad en motores, como sensores para medición, de corte y de posición. También como entrada para velocidad y controles de rango. Algunos ejemplos donde se utilizan actuadores son: dispositivos de control de puertas, robótica, dispositivos de análisis, equipos médicos, etc. La tecnología empleada en los encoders puede ser tanto óptica como magnética. El sensor óptico provee altas resoluciones, velocidades de operaciones altas, y con seguridad, operación de larga vida en la mayoría de los ambientes industriales. Los sensores magnéticos, se utilizan frecuentemente en aplicaciones de trabajo pesado como en laminadoras de papel y acero, proveen alta resolución, altas velocidades de operación, y máxima resistencia al polvo, humedad, golpe térmico y mecánico. [14] 1.5.2 Sensor efecto hall. Los sensores de efecto Hall, están basados en un fenómeno clásico del electromagnetismo descubierto por Edwin Herbert Hall en 1879, son actualmente empleados en una gran variedad de aplicaciones prácticas, incluyendo lectores de tarjetas magnéticas, detectores de proximidad, sensores de velocidad, medidores de potencia eléctrica, brújulas electrónicas, sistemas de ignición, etc. Con la variación de la corriente podemos producir la variación del campo magnético que es quien influye sobre el sensor de efecto hall. El circuito de acondicionamiento del sensor está formado por una fuente de corriente para la polarización del sensor.
(32) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 21 ANTENAS PARABÓLICAS. que está en el rango de los 10 mADC, tiene un amplificador para darle ganancia a la magnitud de la señal, también tiene un filtro paso bajo Butterworth, con este acondicionamiento se pretende fijar a la señal entre unos rangos que le permitan ser una señal adquirible para los niveles lógicos de un computador. El sensor de efecto Hall se basa en la tensión transversal de un conductor que está sometido a un campo magnético. Colocando un voltímetro entre dos puntos transversales de un cable se puede medir esa tensión. Para ello hay que hacer circular por el cable una intensidad fija y acercar un imán. Los electrones que pasan por el cable se verán desplazados hacia un lado. 1.5.3 Sensor Reed Switch. Se puede deducir por el título de este sensor que estamos hablando de un interruptor (switch), la particularidad que distingue al Reed Switch respecto a los otros interruptores es que se ve activado por la presencia de un campo magnético. Cuando es normalmente abierto los contactos se cierran en la presencia del campo; cuando es normalmente cerrado se abren en presencia de un campo magnético. Fue inventado por W. B. Elwood en 1936 cuando trabajaba para Laboratorios Bell. Su uso es más común de lo imaginado, se encuentran por ejemplo dentro de los sensores magnéticos que se utilizan en las aberturas de los sistemas de alarmas hogareñas. Un Reed Switch se compone de dos laminas ferromagnéticas, generalmente compuestas de níquel e hierro, herméticamente selladas en una cápsula de vidrio, las hojas se superponen internamente en la cápsula de vidrio dejando solo un pequeño espacio entre ellas, y se ponen en contacto ante la presencia de un campo magnético adecuado. El área de contacto de ambas hojas se recubre con metales duros (rodio o rutenio) que elevan la vida útil de los contactos. El gas de la cápsula por lo general consiste de nitrógeno o algún gas inerte equivalente, algunos se encuentran al vacío para trabajar con tensiones elevadas. Las láminas actúan como conductores del flujo magnético cuando se encuentran expuestas a un campo magnético externo, ya sea un imán permanente o una bobina electromagnética, se generan polos de polaridad opuesta y los contactos.
(33) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 22 ANTENAS PARABÓLICAS. se cierran cuando la fuerza magnética excede la fuerza elástica de las láminas, a medida que se reduce el campo magnético externo se reduce la fuerza magnética hasta que se hace menor a la fuerza elástica de las láminas momento en el cual se abre el contacto (si el switch es normalmente abierto, en caso de ser normalmente cerrado se cierra). También se pueden encontrar Reed Switch doble, normalmente abierto y normalmente cerrado. En este caso sola una lámina presenta movimiento, se encuentra conectado al contacto normalmente cerrada en ausencia de campo magnético. Cuando un campo magnético de intensidad suficiente actúa sobre el Switch, la lámina se desplaza hacia el contacto normalmente abierto. Las tres láminas son ferromagnéticas, sin embargo, el área de contacto del contacto normalmente cerrado se encuentra compuesta por un material no magnético que se suelda a la hoja ferromagnéticos. Cuando se expone a un campo magnético externo, las dos láminas adquieren la misma polaridad opuesta al contacto de la lámina normalmente abierta. Para cerrar o abrir los contactos de un Reed Switch, son usados generalmente dos variantes: La primera consiste en emplear un imán permanente que proporcione el campo magnético externo necesario. El segundo se basa en colocar al Reed Switch en el interior de una bobina de cobre, la cual al verse energizada por una corriente eléctrica genera el campo magnético necesario. [15] 1.6. Selección de los actuadores para el control de la antena y de la tecnología de control. Como criterio para seleccionar los actuadores del controlador de antena parabólica se tiene en cuenta que el dispositivo se instalaría una vez llegado al diseño comercial (no es objetivo del presente trabajo), en el ICRT (Instituto Cubano de Radio y Televisión) donde las antenas que se usan para la transmisión y recepción de las señales de radio y televisión son de diferentes tamaños, existiendo antenas de 1m, 3m, 3.6m, 4,6m y otras que pueden alcanzar hasta 6m.
(34) CAPÍTULO 1. CAPÍTULO 1. INTRODUCCION A LOS CONTROLADORES DE 23 ANTENAS PARABÓLICAS. de diámetro. Los especialistas que operan en ese centro, para cambiar de satélite tienen que realizar el movimiento de forma manual. Ver Figura 7 del Anexo VI. El actuador es el elemento encargado de colocar automáticamente la antena hacia un satélite determinado, suele utilizarse en las antenas de montaje polar cuando se desean recibir varios satélites por la misma antena parabólica. Proporciona el movimiento y control para que la antena pueda rastrear el arco de satélite mediante un brazo telescópico que se extiende y contrae, controlado por una unidad de control que se puede colocar cerca de la unidad de sintonía. Se necesita un sólo actuador para el seguimiento y orientación de la antena a todos los satélites geoestacionarios del cinturón de Clarke, siempre dentro de un ángulo de acimut total donde los satélites son visibles por la antena. Definición de actuador: este elemento, debe ser capaz de transformar algún tipo de energía, ya sea eléctrica, neumática o hidráulica, etc. en energía mecánica, para aplicarla en un reductor del motor de una máquina. Si además a este actuador le incorporamos un sistema de control, y un conversor de señal, decimos que estamos en presencia de “servo actuador” o un “servo accionamiento”. El actuador recibe la orden de un regulador o controlador y da una salida necesaria para activar a un elemento final de control. [12] 1.7. Consideraciones finales. Mencionadas ya las principales características de los controladores de antenas parabólicas, y habiendo mencionado y descrito el elemento final de la antena (actuador), se procede a afirmar que el dispositivo que se desea diseñar tendrá entre sus módulos un circuito que cambie de sentido, al motor del actuador (de corriente directa), un circuito que acondicione la señal proveniente del actuador para conocer la posición en que éste se encuentre, un circuito para la protección en caso de que exista un sobre consumo de la carga y una tarjeta principal que realice el control total del dispositivo..
(35) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. CAPÍTULO 2.. 24. DISEÑO CIRCUITAL Y PROGRAMACION DEL CONTROLADOR DE ANTENA PARABOLICA. La complejidad circuital de un sistema de control posicional para antenas parabólicas en nuestro caso, está dada por la precisión con que se logre mover dicha antena en las coordenadas de elevación y azimut para direccionar un satélite previamente seleccionado, la cantidad de variables que se incluyen en este, así como las prestaciones que se tengan en cuenta para la presentación de la información e intercambio con los usuarios del equipo y la garantía de la fiabilidad en el funcionamiento del sistema. Para cumplir con estos requisitos, se diseñaron varios módulos de circuitos electrónicos, cada uno de los cuales tienen funciones específicas dentro del sistema y a la vez se conformó un programa básico que se encarga del funcionamiento de todas las partes, así como brindar una operatividad relativamente fácil a los usuarios del sistema. En las consideraciones de diseño, se dividieron los circuitos por partes modulares atendiendo a la función que realizan como se muestra en la Figura 2.1..
(36) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 25. Figura 2.1. Arquitectura modular del Controlador de Antena Parabólica.. 2.1 Caracterización del objeto tecnológico En el diseño, la orientación de la antena se realizará a partir de una lista de la posición de satélites previamente memorizados en el dispositivo, ofertando la posibilidad de cambiar de uno a otro satélite en cualquier momento que desee el operador. En el posicionamiento de una antena intervienen un conjunto de variables que corresponden. a. señales. de. dispositivos. de. entrada. como,. teclado,. realimentaciones de motores y alarmas de sobre carga. Por otra parte las señales de control de los dispositivos externos de salidas como LCD y actuadores, puertos de comunicación. En el caso que nos ocupa como se definió en el CAPITULO 1, usaremos el actuador lineal AEI 6136CH en el movimiento en azimut y otro en elevación, controlados por puentes H diseñados a MOSFET con circuitos de realimentación de los motores y protección de sobre carga, un display de cristal líquido de 16 columnas y 2 filas, un teclado para la configuración y control del sistema. El sistema cuenta con una fuente de corriente directa de 12 VDC y capacidad de 20 ADC posibilitando al circuito de control realizar los movimientos de azimut y elevación simultáneamente. 2.1.1 Caracterización de las variables a manejar en el sistema Señales de control de alimentación de energía a los puentes H: se utilizará para suministrar o interrumpir la energía a los actuadores..
(37) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 26. -Señales de control del puente H, posibilita el control del sentido de giro y velocidad de los motores: se utilizará para posicionar la antena en las coordenadas de azimut y elevación correspondiente al satélite seleccionado. -Señal de falla por sobre corriente de los actuador-puente H: esta señal se emplea para establecer una protección electrónica de los motores de los actuadores y los puentes H, a partir de la medición de la corriente de consumo de ellos y el empleo de comparadores. -Señal de los sensores de azimut y elevación: esta corresponde a un impulso eléctrico proveniente del sensor Reed Switch interno de los actuadores. Esta señal se acondiciona mediante un circuito para conocer la posición real del actuador. 2.2 Diseño de la fuente de alimentación para el equipo. Para realizar el diseño de una fuente de alimentación de un equipo se parte de los requerimientos técnicos o exigencias que debe cumplir esta, así como la propuesta de una estructura que garantice fiabilidad y estabilidad en su funcionamiento. Las fuentes de alimentación para equipos electrónicos, pueden clasificarse básicamente en dos tipos: fuentes lineales y fuentes conmutadas, las fuentes lineales tienen un diseño relativamente simple, que puede llegar a ser más complejo en cuanto mayor sea la corriente que deben suministrar, sin embargo su regulación de voltaje es poco eficiente. Una fuente conmutada, de la misma potencia que una lineal, será más pequeña y normalmente más eficiente, pero será más compleja y por tanto más susceptible a averías. El circuito de alimentación se encarga de suministrar la energía eléctrica necesaria a los distintos elementos que componen el equipo. Éste circuito logra su función, reduciendo el voltaje proveniente de la línea de AC utilizando un transformador y posteriormente se convierte la corriente alterna en continua mediante un puente de diodos, luego esta corriente es filtrada a través de un capacitor electrolítico. Evidentemente el esquema es mucho más complejo que lo comentado.
(38) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 27. anteriormente, ya que en su interior se encuentran otros componentes los cuales los describiremos más adelante. En nuestro caso, la fuente de alimentación consta de tres partes fundamentales, una para alimentación a los motores de los actuadores y otras dos encargadas de suministrar el voltaje de alimentación a los circuitos electrónicos del equipo, las que se describirán de forma independiente para facilitar su análisis. Se han diseñado las fuentes de los circuitos electrónicos independientes a la de los actuadores para evitar que se mezclen los ruidos que se generan en los motores de corriente directa debido al uso de escobillas o carbones, también al parar y más específicamente al cambiar de dirección. De esta forma se evita complejizar el filtrado de los ruidos para evitar inconvenientes no deseados. 2.2.1 Fuente de alimentación 12 VDC. Para implementar el diseño de esta fuente de alimentación, se parte de la información suministrada por el fabricante del actuador en la hoja de datos, es decir, voltaje de alimentación de 12 VDC y la corriente de consumo de 10 ADC en condiciones de máxima carga, es necesario considerar que en muchas ocasiones suceda que los actuadores se muevan simultáneamente, por lo que la carga máxima de diseño se considera la suma de las máximas cargas en los actuadores, es decir, hasta 20 ADC. En algunas aplicaciones en los que los requerimientos de potencia son muy exigentes, complejizan el diseño, ya que cuando aumenta la carga de la fuente de alimentación el voltaje de salida tiende a disminuir, produciéndose un efecto indeseable. Para atenuar al máximo este efecto en nuestro caso empleamos un regulador monolítico perteneciente a la familia de los circuitos integrados 78XX. La arquitectura del circuito diseñado para la fuente de alimentación se muestra en la Figura 2.2 donde empleamos el regulador de voltaje LM7812 cuyas características se muestran en su hoja de datos, seguido del transistor Q1 del tipo TIP122 conectado en configuración colector común, utilizado como excitador para.
(39) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 28. la etapa de potencia conformada por cinco transistores 2N3055 conectados en paralelo también en colector común.. Figura 2.2 Fuente de alimentación para el accionamiento eléctrico.. La ganancia de voltaje de la configuración colector común es 0.99 y la ganancia de corriente es de hfe [16]. La conexión de Q1 con la etapa de potencia forman una configuración Darlington y la ganancia total es la multiplicación de las hfe. Esta configuración ha sido utilizada para aprovechar la estabilidad de voltaje dada por el regulador y la capacidad de corriente que se puede manipular con los transistores de potencia, no obstante, a la salida de la fuente habrá una caída de voltaje debido a las uniones de base emisor del transistor Q1 y de los restantes Q2 a Q6 con respecto al voltaje estabilizado por el regulador, esta caída será variable en función de la corriente consumida por la carga. Los transistores 2N3055 se conectan en paralelo para buscar mayor capacidad de corriente (ver hoja de datos [17]) en esta etapa, garantizando que no exista embalamiento térmico por sobre carga excesiva [18]. De esta forma la corriente máxima total se reparte entre los cinco transistores. Debemos destacar que en la práctica todos los transistores que se fabrican de un mismo tipo no son idénticamente iguales, por ejemplo: la hfe de los 2N3055 puede estar entre 10 y 120 ó también puede suceder que el voltaje V BE no sea idéntico, lo que indica que puede existir una diferencia apreciable entre los cinco transistores.
(40) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 29. de la etapa de potencia. Para evitar los efectos indeseables que ocasionan estas imperfecciones, como por ejemplo: que se cargue un transistor mucho más que otro, colocamos una resistencia en el emisor de cada uno de ellos con un valor de 0.22 ohm (R1 – R5). Cualquier diferencia de voltaje VBE quedaría absorbida por la polarización que se establece cuando comience a conducir el primer transistor. Como habíamos visto anteriormente, el voltaje a la salida de la fuente se ve afectado por la variación con la carga del voltaje VBE de los transistores y además por la caída que se produce en las resistencias de emisor (R1 – R5). Para solucionar esta problemática, se le conectó en el terminal común del regulador de voltaje LM7812 un circuito para adicionar un valor de voltaje a su salida que compense las caídas antes mencionadas. Este voltaje estará limitado por el diodo zener D5 que es de 3.3 VDC, y controlado por la configuración Darlington de los transistores Q7 y Q8 que forman una realimentación negativa para estabilizar el voltaje de la fuente a 12 VDC, lo cual se realiza a través del ajuste de la resistencia variable RV1. La regulación se precisa con la conducción en mayor o menor medida del transistor Q7, quedando adicionado el voltaje de colector de este al valor regulado por el LM7812. Las resistencias R6, R7, RV1 y R8, polarizan a los transistores Q7 y Q8. A la salida del rectificador se coloca un capacitor de alto valor (22000 uF), de igual manera se le sitúa otro en paralelo con la salida de la fuente (5000 uF), para evitar el rizado que se produce por la elevada corriente de consumo de la carga, las conmutaciones de los motores, cambio de sentido de giro, etc. Fuente de alimentación para los circuitos electrónicos. El análisis de esta fuente se realizará en tres partes, una primera para la obtención de 12 VDC al circuito de protección de los motores de los actuadores y otras dos etapas de regulación, para el voltaje de referencia a los comparadores y el suministro de voltaje al microcontrolador..
(41) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 30. En el diseño de los circuitos para la protección de sobre corriente de los motores de los actuadores se utilizaron amplificadores operacionales, los cuales son alimentados con un voltaje de 12 VDC que no puede tener variaciones, ya que estas afectarían la precisión en el funcionamiento de las diferentes etapas que se incluyeron en el diseño. El diseño parte de las recomendaciones del fabricante, para lo cual nos basamos en la Figura 2.3, y a partir de ella establecemos los cálculos de los componentes.. Figura 2.3. Circuito básico para el diseño de fuentes de voltaje con LM317 (Tomado de hoja de datos LM317X).. Para completar el diseño solo es necesario calcular el valor de la resistencia R2, a partir del voltaje que se desee obtener en la salida. Esto se realiza a través de la siguiente fórmula: Vout = 1.25 * (1 + R2/R1) + I adj * R2 Donde:. I adj es la corriente de ajuste, con un valor entre 50 – 100 uA, (típico de. 50 uA). Para un voltaje de salida de 12 VDC, despejando de la fórmula obtenemos que R2 tiene un valor de 2044,37 ohm. Este valor comercialmente no es fabricado, pero empleamos la suma de dos resistencias para aproximarnos a él, como se muestra en el circuito de la Figura 2.4 (R10 – R11)..
(42) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 31. Figura 2.4 Circuito de alimentación de los amplificadores operacionales.. Al circuito antes diseñado se le adiciona una fuente que será necesaria para suministrar el voltaje de referencia a los comparadores empleados en el circuito de protección por sobre carga. El voltaje de salida de esta fuente debe ser lo suficientemente preciso como para que no existan cambios de estado en los comparadores como consecuencia de inestabilidad en la referencia. Para alcanzar una mayor precisión en el voltaje de salida, empleamos conjuntamente con un LM317 el regulador integrado TL431, del cual se muestran sus características en su hoja de datos [19]. De igual forma, en el diseño nos auxiliamos de las recomendaciones del fabricante, nos basamos en la Figura 2.5, y a partir de ella establecemos los cálculos de los componentes..
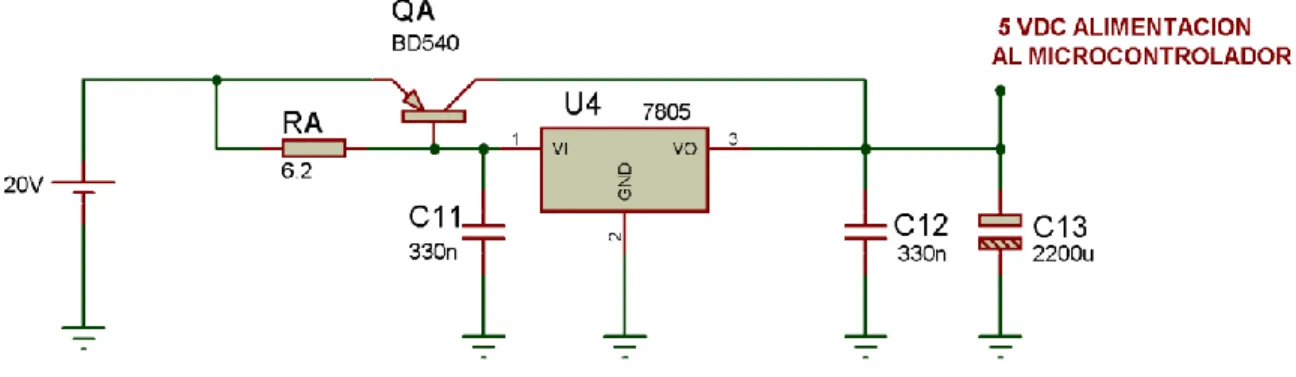
(43) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 32. Figura 2.5 Fuente de referencia para los comparadores empleados en el circuito de protección por sobre carga. (Tomado de hoja de datos TL431).. Para calcular el valor de la resistencia R1, teniendo en cuenta que el valor del voltaje de salida es de 5 VDC, empleamos la siguiente fórmula: Vout = Vref * (1 + R1/R2) Donde:. Vref es el voltaje de referencia especificado, con valores entre 2.440 –. 2.550 V, (típico de 2.495 V). Asumiendo un valor de 250 ohm para R2, obtenemos un valor de R1 de 251.002 ohm. El circuito diseñado se muestra en la Figura 2.6.. Figura 2.6 Circuito de alimentación de voltaje a los amplificadores operacionales incluyendo la fuente de referencia de los comparadores.. En el diseño de la fuente de alimentación del microcontrolador empleamos un LM7805 como componente fundamental, añadiendo un transistor BD540 (QA).
(44) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 33. para limitar la corriente entregada por el regulador monolítico. Las características de estos componentes se muestran en la hoja de datos. LM7805 [20] y BD540 [21]. La resistencia RA polariza la unión base-emisor de QA y se calcula teniendo en cuenta una corriente máxima entregada por el LM7805 de 100 mA considerando un voltaje VBE de QA de 0.62 V, obteniéndose un valor de RA = 6.2 ohm. Como criterio de diseño RA debe ser lo menor posible para que no introduzca inestabilidad en el voltaje de salida. El circuito se muestra en la Figura 2.7.. Figura 2.7 Circuito de alimentación del microcontrolador.. El circuito final de la fuente de alimentación proporciona los tres voltajes necesarios: de 12 VDC para alimentar los amplificadores operacionales, 5 VDC para la fuente de referencia y 5 VDC para la alimentación del microcontrolador, como se muestra en la Figura 2.8..
(45) CAPÍTULO 2. DISEÑO CIRCUITAL Y PROGRAMACION DEL COTROLADOR DE ANTENA PARABOLICA. 34. Figura 2.8 Fuente de alimentación de los amplificadores operacionales, fuente de referencia y alimentación del microcontrolador.. 2.3 Diseño del circuito de accionamiento eléctrico para el mando de los actuadores de acimut y elevación. Los actuadores seleccionados para ser utilizados como elemento final en el sistema de control de posición de la antena son del tipo lineal de la serie 6136CH y las características se muestran en la página del fabricante del dispositivo [22]. Su función fundamental es proporcionar un desplazamiento hacia afuera o hacia adentro que permita variar la posición de una antena asociada a él, esto se logra con la polarización en un sentido o en el otro de un motor de corriente directa de 12 V. En el diseño del accionamiento eléctrico para el mando a estos actuadores se tuvieron en cuenta cinco premisas fundamentales: . Cambio de polaridad al motor en función de la dirección del movimiento a partir de señales de mando de 0 y 5 VDC proveniente del microcontrolador..
Figure




+7





Documento similar