Procedimiento para la determinación de parámetros del modelo doble jaula del motor de inducción mediante algoritmos genéticos con funciones multiobjetivo
100
0
0
Texto completo
(2) PENSAMIENTO. “…todo lo que hagamos va dirigido a la preservación y desarrollo en Cuba de una sociedad socialista, sustentable y próspera”.
(3) AGRADECIMIENTOS Es injusto citar nombres cuando piden dedicar las páginas que siguen, pues para lograrlas han estado involucradas tanta y tantas personas. Comenzaré agradeciendo: A mis Tutores Deivis e Ignacio por su dedicación, entereza, por su paciencia e infinidad de conocimientos, por su amistad, por ayudarme a dar este último paso en mi carrera, Gracias! A mi Mamá y mi Papá San Blas que juntos forjaron a la persona que soy hoy en día. Gracias a ambos por darme su amor, por dedicarme los mejores años de su vida, por inculcarme los valores que hoy poseo, por guiarme por el camino correcto en esta vida llena de desvíos, por ser mis mejores amigos, en fin gracias por Existir. A mi maravillosa esposa, por estar todos estos años y crecer junto a mí, por su incondicional amor, por aguantarme, por hacerme sentir acompañado incluso en los momentos de mayor soledad, por ser como es. Gracias. A mis suegros Yasmirt y Normando primero por crear a tan maravillosa mujer que hoy es mi esposa y segundo por cuidarme como si fuera su hijo, por estar a mi lado y aconsejarme. A mi Papá por darme este maravilloso regalo que es la vida, por poner esos genes llenos de buenos valores en mí. A mi Tío Jesús y familia por preocuparse por mí, por cuidarme y permanecer a mi lado, por regañar mis decisiones erróneas y criticarme constructivamente. A Daniel por compartir tantos años conmigo, por crecer juntos ayudándome incondicionalmente, por escuchar hasta la más loca de mis ideas y apoyarlas o criticarlas si fuese necesario, por estar ahí en las altas y en las bajas, gracias brother..
(4) AGRADECIMIENTOS A José “el uno” (José Carlos), por ser un gran amigo y compañero, por tu ayuda brindada en estos años de carrera, por tus consejos, por tus críticas que aunque fuertes a veces certeras, por estar ahí cuando te he necesitado, gracias amigo. A Reinier, Fernando y Asiel mis cotesiantes por ser mis compañeros de lucha en esta batalla final. Al resto de mi familia y amigos involucrados todos en los caminos de mi vida, trazándolos y mejorándolos para que mi andar por la vida fuese más fácil.. En Fin ¡Gracias a todos!.
(5) RESUMEN Este trabajo propone un procedimiento para estimar los parámetros del modelo circuital doble jaula del motor de inducción, mediante el empleo de algoritmos genéticos con funciones multiobjetivo. Se efectúa el estudio de las características generales constructivas y de operación de los motores trifásicos de inducción, las distintas clases de eficiencia y la caracterización de los datos ofrecidos por los fabricantes. La estimación de parámetros se efectúa a partir exclusivamente de los datos que ofrece el fabricante en sus catálogos. El procedimiento emplea varias técnicas, entre ellas el método de la secante y los algoritmos genéticos con funciones multiobjetivo. Se valida mediante su aplicación a varios motores de la firma Baldor, lo que permite establecer recomendaciones para su uso y se implementó como una aplicación computacional sobre el Matlab 7.10, de esta manera se logra la automatización y se estiman los parámetros del circuito equivalente de doble jaula..
(6) ÍNDICE INTRODUCCIÓN. ________________________________________________________ 1 CAPÍTULO 1. ASPECTOS GENERALES _____________________________________ 5 Introducción _________________________________________________________________ 5 1.1.. Generalidades sobre los motores trifásicos de inducción _____________________ 5. 1.2.. Clases de diseño de motores de inducción _________________________________ 6. 1.2.1.. 1.3.. Clases de Eficiencia ___________________________________________________ 10. 1.3.1. 1.3.2.. 1.4.. Especificación de los motores de inducción alimentados con voltaje y frecuencia constantes. 8. Armonización de motores eléctricos ___________________________________________ 11 Proceso para lograr la homogenización _________________________________________ 14. Características generales de los datos de catálogos ofrecidos por los fabricantes19. 1.4.1. 1.4.2.. Visión general del Motor Master Versión +4.1 ____________________________________ 19 Características de las base de datos ___________________________________________ 21. 1.5. Caracterización de los datos ofrecidos por los fabricantes para un motor de 11.19 kW (15 HP) _________________________________________________________________ 22 1.5.1.. Resultados del análisis efectuado en todos los motores de 11.19 kW __________________ 23. 1.6. Caracterización de los datos ofrecidos por los fabricantes para un motor de 37.3 kW (50 HP) _________________________________________________________________ 25 1.6.1.. Resultados del análisis efectuado en todos los motores de 37.3 kW (50 HP) ____________ 27. 1.7. Caracterización de los datos ofrecidos por los fabricantes para un motor de 74.6 kW (100HP) _________________________________________________________________ 29 1.7.1.. 1.8.. Resultados del análisis efectuado en todos los motores de 74.6 kW (100HP) ___________ 30. Consideraciones finales del capítulo _____________________________________ 32. CAPÍTULO 2. PROCEDIMIENTO PARA LA DETERMINACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA ________________________________________________ 33 2.1. Introducción _______________________________________________________ 33 2.2. Optimización multiobjetivo utilizando NSGA -II __________________________ 33 2.2.1. Descripción detallada de NSGA II _________________________________________________ 34. 2.3. Procedimiento con algoritmo multiobjetivo y método de la secante ______________ 37 2.3.1. Modelo circuital doble jaula empleado en el algoritmo multiobjetivo con método de la secante __ 37. 2.4. Funciones de error empleadas en el cálculo de los parámetros _________________ 39 2.5. Determinación de las características de comportamiento ______________________ 41 2.5.1. Determinación de las características de comportamiento mediante el deslizamiento especificado 42 2.5.2. Determinación de las magnitudes de comportamiento mediante la potencia de salida _________ 43.
(7) ÍNDICE. 2.6. Determinación del deslizamiento para momento máximo y de empuje____________ 44 2.7. Consideraciones en el algoritmo genético para la estimación de parámetros ______ 45 2.8. Consideraciones finales del capítulo ________________________________________ 45. CAPÍTULO 3. VALIDACIÓN DEL PROCEDIMIENTO PROPUESTO _______________ 46 3.1. Introducción ____________________________________________________________ 46 3.2. Resultados obtenidos con el procedimiento para el motor de 11.19 kW (15HP). ____ 46 3.3. Resultados obtenidos con el procedimiento para el motor de 37.3 kW (50HP) _____ 52 3.4. Resultados obtenidos con el procedimiento para el motor de 74.6 kW (100HP). ____ 57 3.5. Consideraciones finales del capítulo ________________________________________ 61. CONCLUSIONES _______________________________________________________ 62 RECOMENDACIONES ___________________________________________________ 63 BIBLIOGRAFÍA ________________________________________________________ 64 ANEXOS ______________________________________________________________ 67.
(8) INTRODUCCIÓN INTRODUCCIÓN. Actualmente los motores trifásicos de inducción con características especiales en el diseño de su rotor son los más difundidos en la industria. Muchas son las ventajas que los hacen incomparables con los otros de su especie. Su relativa sencillez y robustez, así como sus características inmejorables de operación, como arranque, frenaje y funcionamiento en estado estable, hacen al motor trifásico de inducción el favorito para la inmensa mayoría de las aplicaciones a nivel industrial. Indudablemente este tipo de motor es capaz de cumplir con las exigencias técnicas más drásticas, con un costo económico inmejorable. El vertiginoso desarrollo de la electrónica de potencia ha posibilitado que las limitaciones técnicas que este tipo de motor presentaba fueran prácticamente anuladas, convirtiéndose en el motor soñado por los especialistas. Se conoce que aproximadamente más del cincuenta por ciento de la energía eléctrica consumida a nivel mundial es consumida por los motores de inducción. Ésta realidad, unida a la crisis energética actual, ha motivado la fabricación de motores cada vez más eficientes y la adopción de disposiciones legales por parte de los gobiernos de muchos países que tienden a obligar a los usuarios a adoptar todas las medidas pertinentes para la disminución del consumo de energía eléctrica en estas máquinas. La estimación del comportamiento en estado transitorio y estable es de vital importancia para temas de estabilidad de sistemas eléctricos y para la evaluación del desempeño eficiente de los motores. La mayoría de los fabricantes ofrecen datos sobre el comportamiento del motor para estados característicos de operación y bajo condiciones de voltaje y frecuencia fijadas, conocidos estos últimos como nominales. Por tanto resulta fundamental la estimación mediante los datos aportados por el fabricante de los parámetros que conforman el circuito equivalente doble jaula del motor de inducción trifásico, con el objetivo de realizar estudios en régimen dinámico y estable, bajo condiciones iguales o diferentes a las nominales como: voltajes desbalanceados, desviación de voltaje, armónicos, etc. Para los casos de los motores clase de diseño B y C el circuito equivalente debe considerar entre otros aspectos el efecto pelicular. Estudios efectuados por autores nacionales [1], [2], trataron la estimación de parámetros del modelo circuital doble jaula y jaula profunda para posteriormente obtener las características de comportamiento del mismo. La estimación de estos parámetros se realizó con un gran cúmulo de datos, entre ellos, las dimensiones constructivas de las diferentes partes del rotor y estator. Además aspectos relacionados con el diseño de la. 1.
(9) INTRODUCCIÓN máquina, tales como tipo de estructura ferromagnética, características de los materiales empleados, etc. Los datos con los cuales no se contaban fueron asumidos mediante consideraciones y aproximaciones dada por la literatura. Los resultados obtenidos en estas investigaciones resultaron buenos y cumplieron con sus objetivos propuestos al estimar los parámetros del modelo doble jaula y comprobar su efectividad en la obtención de las características de comportamiento. En la actualidad la disponibilidad de datos tan específicos, prácticamente es imposible, mucho menos a nivel industrial. Apenas se cuenta con el comportamiento del motor en estados típicos de régimen estable, además de las corrientes y momentos para puntos característicos de operación inestable como: momentos de arranque, empuje y máximo. También se incluyen datos como número de polos y frecuencia, que son frecuentemente ofrecidos. Autores de reconocido prestigio del ámbito internacional, [3],[4],[5],[6],[7], proponen metodologías para el cálculo de parámetros del circuito equivalente a partir de los escasos datos ofrecidos por el fabricante. Un número considerable de ellos emplean el modelo doble jaula y determinan sus parámetros, pero solo garantizan realizar estudios dinámicos, además emplean ciertas consideraciones que no necesariamente tienen que generalizarse. La necesidad de estimar los parámetros de un modelo circuital capaz de predecir el comportamiento en estado transitorio y estable bajo condiciones iguales o no a las especificadas por el fabricante constituye la situación problemática de la investigación y condiciona el problema científico de la investigación. ¿Cómo contribuir a la estimación de los parámetros del circuito equivalente doble jaula a partir de los datos ofrecidos por el fabricante para predecir estados transitorios y estables del motor de inducción? Como objetivo general de este trabajo se declara: Proponer un procedimiento para estimar los parámetros del circuito equivalente doble jaula del motor de inducción a partir de los datos ofrecidos por el fabricante mediante el empleo de algoritmos genéticos con funciones multiobjetivo. Los objetivos específicos que se trazan para dar cumplimiento al objetivo general son: . Realizar una revisión bibliográfica relacionada con las características generales de construcción y operación de los motores de inducción.. . Analizar los datos de catálogos que ofrecen los distintos fabricantes.. 2.
(10) INTRODUCCIÓN . Establecer un procedimiento capaz de estimar los parámetros del circuito equivalente doble jaula a partir de los datos ofrecidos por el fabricante mediante el empleo de algoritmos genéticos con funciones multiobjetivo.. . Implementar en Matlab 7.10, el procedimiento propuesto de manera que facilite la estimación de los parámetros del circuito equivalente doble jaula.. . Validar el procedimiento a partir de los datos ofrecidos por el fabricante.. Las tareas de investigación son las siguientes: . Revisión de libros, artículos, trabajos de diplomas y catálogos de fabricantes relacionados con los motores trifásicos de inducción.. . Análisis de los datos ofrecidos por los fabricantes para distintos tipos de motores.. . Establecimiento de un procedimiento capaz de estimar los parámetros del circuito equivalente doble jaula del motor, a partir de tablas de comportamiento que ofrecen los fabricantes y mediante el empleo de algoritmos genéticos con funciones multiobjetivo.. . Implementación en Matlab 7.10 del procedimiento propuesto de manera que facilite la estimación de los parámetros del circuito equivalente del modelo doble jaula.. . Validación del procedimiento con diferentes motores a partir de los datos ofrecidos por el fabricante.. La hipótesis de investigación establecida para este trabajo es: Si se propone un procedimiento con el empleo de algoritmos genéticos con funciones multiobjetivo se logra estimar los parámetros del modelo doble jaula del motor de inducción con suficiente precisión. La importancia del trabajo radica en la estimación de los parámetros del modelo circuital doble jaula a partir de escasos datos, exactamente los ofrecidos por el fabricante y el empleo de los algoritmos genéticos con funciones multiobjetivo como vía de solución al sistema de ecuaciones no lineales; esto contribuirá a la realización de estudios de predicción bajo diferentes regímenes y sometidos a condiciones de explotación nominales o fuera de las mismas.. 3.
(11) INTRODUCCIÓN El aporte del trabajo, desde el punto de vista metodológico, radica en el procedimiento propuesto para estimar los parámetros del circuito equivalente doble jaula del motor de inducción, a partir de los datos de catálogos ofrecidos por el fabricante y con el empleo de algoritmos genéticos con funciones multiobjetivo. Desde el punto de vista práctico, el aporte está en la aplicación computacional implementada, la cual puede ser utilizada para la estimación de parámetros del circuito equivalente doble jaula del motor de inducción trifásico. El informe de la investigación cuenta con una introducción, tres capítulos de desarrollo, conclusiones, recomendaciones, referencias bibliográficas y un conjunto de anexos necesarios. En el primer capítulo se realiza el estudio del estado actual del conocimiento en la temática de los motores de inducción. Se identifican las diferentes clases de diseño y distintos tipos de eficiencia. Además se efectúa una caracterización de los datos que ofrecen los fabricantes. La descripción del procedimiento propuesto para estimar los parámetros del modelo circuital del motor de inducción se presenta en el segundo capítulo. Además se aborda el tema sobre las peculiaridades de los algoritmos genéticos con funciones multiobjetivo en la solución de sistemas de ecuaciones no lineales. En el tercer capítulo se realiza la validación del procedimiento implementado en Matlab 7.10 con diferentes motores de la firma Baldor, para esto se efectúan corridas a partir de diferentes casos de estudio. También se presenta un análisis crítico de los resultados obtenidos.. 4.
(12) CAPÍTULO 1 CAPÍTULO 1. ASPECTOS GENERALES Introducción En la actualidad no se concibe proceso alguno sin la presencia del motor eléctrico, desempeñando un importante papel en la sociedad; los motores son el corazón de las máquinas modernas, por esa razón es necesario conocer sus principios fundamentales de funcionamiento, desde su construcción hasta las aplicaciones. 1.1.. Generalidades sobre los motores trifásicos de inducción. Los motores de inducción se utilizan para accionar todo tipo de cargas en las industrias, desde potencias menores de 100 W hasta 10 MW y mayores aún. Las velocidades de operación que alcanzan estos motores sobrepasan decenas de miles de rpm. Hay dos maneras diferentes de alimentar un motor de inducción que se encuentra con una carga acoplada: . Voltaje y frecuencia constantes (V y f constantes) – conexión a la red de alimentación. . Voltaje y frecuencia variables-conexión de convertidores estáticos (PWM). Tradicionalmente la carga se representa por su curva de momento de salida contra la velocidad del rotor. Existen algunos tipos básicos de cargas, algunas requieren sólo velocidad constante (V y f constantes) y otros requieren velocidad variable (V y f variables). En principio las especificaciones en el diseño de los motores de inducción para que operen a velocidades constantes o variables son distintas para cada uno de los casos. También existen motores que se diseñan para V y f constantes y que en algún momento pueden alimentarse de una fuente de voltaje y frecuencia variable para cuando se requiere cambios en la velocidad [8]. En la selección del motor adecuado para una aplicación específica es necesario tener presente las especificaciones de la fuente de alimentación, o sea si el V y la f son constantes o variables; y chequear entonces si el motor existente es la opción correcta para operar por ejemplo una carga de velocidad variable. Entonces para escoger el motor indicado para cualquiera de los dos casos se debe tener un cuidado especial. Los principios del diseño son comunes tanto para los motores que operan a velocidad constante como para los que lo hacen a velocidad variable. Sin embargo, para el último. 5.
(13) CAPÍTULO 1 caso existen diferentes especificaciones como las contracciones para un diseño especial o aspectos geométricos como la geometría de la ranura del rotor, es decir, los motores diseñados para ser alimentados por conversores estáticos (PWM), presentan una estructura física diferente [9].Todo indica que en un futuro cercano se diseñarán y fabricarán motores de inducción para aplicaciones de velocidad variable. 1.2.. Clases de diseño de motores de inducción. La Asociación Nacional de Fabricantes Eléctricos (NEMA) en los Estados Unidos y la Comisión Electrotécnica Internacional (IEC) en Europa, han clasificado los motores asíncronos según el diseño de su rotor. A estos diseños corresponden las curvas de par representadas en la Fig.1.1[11]. Figura 1.1.Curvas par-velocidad para los diseños NEMA A, B, C y D e IEC N y H[10] . Los diseños NEMA más importantes son: Diseño clase A: Son motores de simple jaula, en los que apenas se da el efecto pelicular, con barras de gran sección y, consecuentemente, de baja resistencia. Tienen pequeños deslizamientos de plena carga y de par máximo, gran par máximo y menor par de arranque que otros motores [12],[13]. Principales características: . Buena capacidad de disipación del calor.. . Alta resistencia y baja reactancia al arranque.. 6.
(14) CAPÍTULO 1 . El par máximo está entre 200% y 300% del par de plena carga y ocurre a un bajo deslizamiento.. . Aceleración bastante rápida hacia la velocidad nominal.. . Presenta la mejor regulación de velocidad, entre el 2 y el 4%.. . Desafortunadamente su corriente de arranque varía entre 5 y 7 veces la corriente nominal.. . Han sido reemplazados por los motores de diseño clase B en los últimos años.. . Se utilizan en ventiladores, sopladores, bombas, tornos, etc.. Diseño clase B: Son motores de ranura profunda. Aunque su par de arranque es casi igual al de los motores de clase A (es ligeramente inferior), su corriente de arranque es menor. El rendimiento y el factor de potencia a plena carga son ligeramente inferiores a los de clase A. Este es el tipo de motor es más frecuente y es equivalente al diseño N de la IEC [12],[13],[14]. Principales características: . Par de arranque normal, baja corriente de arranque y bajo deslizamiento.. . Produce prácticamente el mismo par de arranque que el diseño anterior (Clase A).. . El par máximo es mayor o igual al 200% del par de carga nominal.. . Deslizamiento bajo (menor del 5%).. . Se prefieren sobre los diseños de clase A por requerir poca corriente de arranque.. Diseño clase C: Son motores de doble jaula o de ranura profunda. Tienen mayor par de arranque que los motores A y B y presentan menor par máximo y mayores deslizamientos de plena carga y de par máximo que los motores A y B. Esto hace que su rendimiento a plena carga sea algo inferior. Este diseño es equivalente al H de la IEC [13],[14],[15]. Principales características: . Alto par de arranque (entre 2 y 2.5 veces el nominal) con bajas corrientes de arranque (de 3.5 a 5 veces la nominal).. . Son construidos con un rotor de doble jaula (más costosos).. . Bajo deslizamiento (menos del 5%) a plena carga.. 7.
(15) CAPÍTULO 1 . Debido a su alto par de arranque acelera rápidamente.. . Cuando se emplea con cargas pesadas, se limita la disipación térmica del motor, ya que la mayor parte de la corriente se concentra en el devanado superior.. . Tiende a sobrecalentarse con arranques frecuentes.. . Se utilizan para cargas con alto par de arranque, compresor y transportador.. Diseño clase D: Son motores de simple jaula en los que las barras del rotor son de pequeña sección y están construidas con un metal de alta resistividad. Esto hace que su resistencia sea elevada, lo que origina que el deslizamiento de par máximo sea muy elevado, así como el correspondiente a la plena carga. El par de arranque es alto, pero el rendimiento a plena carga es bajo. Este tipo de motor se utiliza en accionamientos con control sin variación de la frecuencia o para accionamiento de cargas con fuertes y frecuentes aceleraciones (grúas, prensas, excavadoras, otras)[13],[15],[16]. Principales características: . También conocidos como de alto par y alta resistencia.. . Alto par de arranque (275% o más del nominal) y baja corriente de arranque.. . Alto deslizamiento a plena carga.. . La alta resistencia del rotor desplaza el par máximo hacia una velocidad muy baja.. . Diseñado para servicio pesado de arranque, en especial grandes volantes utilizados en troqueladoras o cortadoras.. También existen las clases E y F, llamados motores de inducción de arranque suave, pero obsoletos hoy en día. 1.2.1. Especificación de los motores de inducción alimentados con voltaje y frecuencia constantes. La información clave relacionada con el rendimiento del motor, la construcción y las condiciones de funcionamiento son proporcionadas a los usuarios. La NEMA en EE.UU y la IEC en Europa tratan dichos temas para establecer una armonización entre los fabricantes y los usuarios de todo el mundo. La tabla 1.1 resume los más importantes parámetros y sus correspondientes en la NEMA [16].. 8.
(16) CAPÍTULO 1 Tabla1.1. Normas NEMA para motores de inducción trifásicos (con rotor de jaula). Parámetros. NEMA. Datos de chapa. NEMA MG – 1 10.40. Marcas de los terminales. NEMA MG - 1 2.60. Tamaño del arrancador según NEMA Tipos de carcasa según NEMA Dimensiones de la estructura. NEMA MG -111. Asignaciones de la estructura. NEMA MG- 110. Corriente a plena carga. NEC Tabla 430 a 150. Tensión. NEMA MG – 112.44, 14.35. Impacto de la tensión y la variación de frecuencia Letras de código. NEMA MG – 110.37. Arranque. NEMA MG – 112.44,54. Letra de diseño y momento. NEMA MG -112. Temperatura de devanado. NEMA MG – 112.43. La eficiencia del motor. NEMA MG- 12 - 10. Vibración. NEMA MG- 17. Pruebas. NEMA MG -112,55, 20, 49 / IEEE-112B. Armónicos. NEMA MG -1 30. Aplicaciones de los convertidores. NEMAMG -1, 30, 31. Existen muchas especificaciones que muestran la complejidad del diseño del motor de inducción, los datos de chapa son los de mayor importancia [17]. Los datos que se muestran a continuación se ofrecen en la chapa: . La clase de diseño del tipo de motor y su carcasa, según el fabricante. . Potencia de salida kW (HP). . El tiempo de explotación. . La temperatura ambiente máxima. . El tipo de aislamiento. . Velocidad (rpm) a carga nominal. 9.
(17) CAPÍTULO 1 . La frecuencia. . Número de fases. . Corriente de carga nominal. . Voltaje de Línea. . Corriente del rotor bloqueado o letra de código para kVA de rotor bloqueado por. HP para el motor de ½ HP o más . Letra de diseño (A, B, C, D). . Eficiencia nominal. . El factor de carga de servicio es distinto de 1. . Factor de servicio en amperes cuando el factor de servicio es superior a 1.15. . Temperatura a la que se regula la protección de sobrecarga. . Información sobre voltaje dual y la opción de operación en cuanto a la frecuencia. El factor de potencia nominal no aparece en las placas de identificación NEMA, pero este tiene valores iguales a la mayoría de las normas europeas. La eficiencia es quizás la especificación más importante de un motor eléctrico pues el costo de energía por año de un motor de 1kW es notablemente más alto que el costo inicial del mismo. Además un incremento del 1% en la eficiencia del motor, ahorra la energía equivalente en un período de 3 a 4 años, al costo inicial del motor. Los motores de inducción estándar y alta eficiencia se definen y estandarizan a nivel mundial. Como es de esperar un motor de inducción de alta eficiencia (clase E) tiene un mayor rendimiento que uno estándar de igual tamaño, aunque presentan un elevado costo inicial y los valores de corriente de arranque son más altos. Este último aspecto supone una carga adicional en la red eléctrica local, cuando se realiza un arranque directo desde las líneas. Si se utiliza un inversor o arrancadores suaves, entonces el elevado valor de la corriente en el arranque no tiene efecto sobre la red eléctrica local [17]. 1.3.. Clases de Eficiencia. Desde un punto de vista técnico y legal, el mercado electrotécnico es muy complejo. Cada dispositivo eléctrico debe cumplir diversos requisitos que tienen que ver con su aplicación, su seguridad y su compatibilidad con otros dispositivos. Estos requisitos pueden estar. 10.
(18) CAPÍTULO 1 incluidos en reglamentos, procedimientos o normas nacionales, regionales o industriales y a menudo existen otros requisitos indirectos [19]. Las normas pueden abordar la eficiencia energética de un dispositivo específico de distintas formas. El proceso típico para determinar la eficiencia de un dispositivo medirá el valor de las pérdidas de energía de acuerdo con las reglas definidas en una norma. Los resultados (pérdidas de energía o eficiencia energética calculada) se contrastan con los índices de eficiencia (valores normativos de pérdida o eficiencia) para determinar si el dispositivo cumple con los requisitos mínimos de eficiencia energética (también llamada estándares mínimos de desempeño energético, MEPS) u otras normas. Si el dispositivo cumple los requisitos MEPS de un país dado, puede comercializarse. Si satisface los criterios del plan de etiquetado voluntario, también puede etiquetarse y reconocerse como un producto energéticamente eficiente [19]. Las normas definen qué es la eficiencia energética, determinan el procedimiento para realizar las pruebas y las medidas del consumo de energía e integran los requisitos MEPS o los planes de etiquetado voluntario. Los problemas surgen cuando no se armonizan dichas normas en todos los países o industrias. Un buen ejemplo del éxito de la armonización de las normas se encuentra en el sector del motor eléctrico [19]. 1.3.1. Armonización de motores eléctricos Se estima que los motores eléctricos consumen el 75% de la electricidad mundial en una variedad de aplicaciones. La mejora de la eficiencia de los motores depende de la reducción total de todos los tipos de pérdidas de energía propias de estas máquinas: . Pérdidas de cobre en el devanado del estator (Ps). . Pérdidas magnéticas en el núcleo de hierro (Pfe). . Pérdidas de cobre en el rotor (Pr). . Pérdidas por fricción y resistencia aerodinámica (Pfw). . Pérdidas adicionales (PLL). La eficiencia de un motor se define como la relación entre la potencia de salida (mecánica) y la potencia de entrada (eléctrica) .Puede ser medida o calculada directa o indirectamente, como se especifica en (1.1): [20]. 11.
(19) CAPÍTULO 1 La medición directa implica medir la potencia de entrada por medio de la corriente y tensión de entrada, y la potencia de salida implica medir la potencia de entrada y calcular la potencia de salida en base a las pérdidas dentro del motor. Por lo tanto, la eficiencia quedará determinada si se conoce alguna de las potencias, la de entrada o la de salida, y las pérdidas. El enfoque simplista para determinar la eficiencia directamente por medición de la potencia eléctrica de entrada con un watímetro y potencia mecánica con un sensor de par, más la velocidad con tacómetro, puede conducir a grandes errores, especialmente para los motores de alta eficiencia, donde ambas potencias son grandes en comparación con las pérdidas del motor [21]. Durante muchos años se usaron dos normas principales en todo el mundo para determinar estas pérdidas: . IEC 60034-2. . IEEE 112 método B (o IEEE 112-B). La norma IEC 60034-2 se empleó principalmente en Europa, India y China, y previamente en Australia y Nueva Zelanda. El método definido en la norma IEEE 112-B se usó en Norteamérica y en países con una red eléctrica de 60 Hz. En torno al año 2000 se introdujo en Australia y Nueva Zelanda un método similar al IEEE 112-B, pero la norma IEC 60034-2 todavía puede usarse en dichos países. En Canadá se adoptó una norma equivalente (CSA C390) [19]. La norma IEEE 112-B eliminó los problemas de temperatura de la IEC 60034-2 para calcular las pérdidas en el devanado del estator y en el rotor a temperatura constante. Además, se creó un procedimiento de ensayo para determinar otras pérdidas de carga para evitar el margen fijo actual de la norma IEC 60034-2. Como consecuencia, surgieron dos métodos de determinación de la eficiencia predominantes para el motor eléctrico multifásico: IEC e IEEE 112-B. Lo comentado anteriormente se ilustra en la figura 1.2 [19].. 12.
(20) CAPÍTULO 1. Figura 1.2. Normas y etiquetas relativas a la eficiencia de los motores: evolución histórica. En la Unión Europea, la determinación de la eficiencia se realizó de acuerdo con el método de ensayo descrito en la norma IEC 60034-2. El acuerdo voluntario del Comité Europeo de Fabricantes de Máquinas Eléctricas y Electrónica de Potencia (CEMEP) definió tres clases posibles de eficiencia para los motores: . EFF3 Motores de baja eficiencia. . EFF2 Motores de eficiencia mejorada. . EFF1 Motores de alta eficiencia. El acuerdo también estipuló que los fabricantes deben marcar el nivel de eficiencia en las placas de características del producto y en una tabla de datos de muestra para ayudar a los usuarios a seleccionar e identificar el motor más adecuado. En los Estados Unidos, la determinación de la eficiencia se basó en la norma IEEE 112. El método de ensayo, IEEE 112-B, exigía medidas directas de todas las pérdidas en una frecuencia de red eléctrica de 50 ó 60 Hz. Los MEPS para todos los motores fabricados o utilizados en los Estados Unidos se establecieron en la Ley de Política Energética (EPAct 1992). Posteriormente, NEMA propuso un programa de certificación voluntaria, NEMA Premium, que se basó en la norma IEEE 112-B. Tanto para los requisitos obligatorios como para los voluntarios, los resultados de las medidas se contrastaron después con los índices de eficiencia específicos, que se definieron en la norma NEMA MG1 [19].. 13.
(21) CAPÍTULO 1 Además, Estados Unidos utiliza la norma industrial IEEE 841 en las industrias química, petrolífera y metalúrgica con motores para cargas pesadas con largos períodos de servicio. Así, las soluciones en otros países fueron una adaptación de los planteamientos de EE.UU: se armonizaron o eran similares a las normas IEC 60034-2 o IEEE 112-B. Brasil, por ejemplo, tiene un método de ensayo basado en IEEE 112-B, pero los MEPS existentes son distintos de los que se usan en los Estados Unidos. En la India, las clases de eficiencia se armonizaron con CEMEP, pero el método de ensayo se basa en la norma local en lugar de la norma IEC. China adoptó la política de los MEPS; los requisitos mínimos de eficiencia energética y los grados de eficiencia energética para motores asíncronos trifásicos de pequeño y mediano tamaño se describen con la norma China GB 18613-2006. Sin embargo, a efectos de pruebas, se utiliza la norma local GB/T 1032, equivalente a la IEC 60034-2. Además, en China hay varios grupos de normas comunes por ejemplo, los llamados motores de la serie Y. Estos tipos de motores, aunque no se describen en las normas predominantes, están ampliamente reconocidos en el mercado chino y se consideran como la referencia [19]. Los diferentes métodos de prueba y planes de etiquetado produjeron algunos problemas a la hora de comparar la eficiencia de los motores. Además, también surgieron algunos problemas por la nomenclatura utilizada para las diferentes economías. La frase “motor de alta eficiencia” puede tener un significado diferente en distintos mercados o países. Podría darse el caso de que lo que se consideraba un motor de alta eficiencia en un país apenas cumpliría los niveles mínimos de eficiencia de otro con tecnologías más avanzadas. En su conjunto, estos elementos estaban bloqueando la promoción mundial de los motores energéticamente eficientes [19]. 1.3.2. Proceso para lograr la homogenización Se realizaron, por lo tanto, esfuerzos para unificar y alejarse de la redundancia de las prácticas existentes de normalización. Con la base de una nueva propuesta de trabajo emitida por el Comité Nacional Alemán, la DKE K311, el IEC TC 2 (la Comisión técnica de máquinas eléctricas giratorias) estableció un grupo de trabajo (WG 31) en 2006 y se le asignó la tarea de definir las clases de eficiencia energética para los motores industriales trifásicos. Otro colaborador en este proceso de armonización fue la iniciativa privada conocida como normas de eficiencia energética para los sistemas de motor eléctrico (SEEEM), creada en 2006, cuyas recomendaciones también tuvo en cuenta el grupo WG 31 [19].. 14.
(22) CAPÍTULO 1 La primera reunión del WG 31 se celebró en octubre de 2006 en Frankfurt, Alemania. En la segunda reunión, celebrada en mayo de 2007 en Washington, D.C., se vio claro que la existencia de una norma de clasificación por sí sola no resolvería todos los problemas; también debían describirse los métodos para el funcionamiento energéticamente eficiente de los motores eléctricos y las aplicaciones. En mayo de 2007 se presentó una propuesta para crear una guía de eficiencia energética en la junta general del IEC TC 2 en Milán, Italia, donde se confirmó el proyecto y se presentó bajo el nombre de IEC TS 60034-31. El IEC TC 2 también comenzó a revisar la norma IEC 60034-2, que ya llevaba muchos decenios en uso. La revisión empezó en 1996, cuando el CENELEC (Comité Europeo de Normalización Electrotécnica) recibió un mandato de la Comisión Europea (M244) y encargó la tarea de desarrollar una nueva norma de ensayo a la IEC. El objetivo era preparar una nueva norma IE WG 2 de la IEC SC2G en septiembre de 1997 en Frankfurt, un miembro del grupo de trabajo de la IEC presentó el método de ensayo IEEE 112-B, pero esta primera propuesta no se aceptó (por cierto, el grupo de trabajo WG 2 se convertiría más tarde en el WG 28 del IEC TC 2). Después de muchos años de debate, el método de ensayo se incluyó en la IEC 61972. Más tarde, el método se incluyó en la nueva edición de la IEC 60034-2 y como consecuencia, la IEC 61972 se ha retirado [19].. Figura 1.3. Clases de eficiencia a escala mundial.. 15.
(23) CAPÍTULO 1 Otras actividades realizadas por el comité técnico 2 de la IEC, máquinas giratorias (WG 28 y WG 31), dieron lugar a las siguientes normas: IEC 60034-2-1 (2007): Incluye los métodos de ensayo de la eficiencia (armonizados con IEEE 112-B; sin embargo, todavía existen pequeñas diferencias). IEC 60034-30 (2008): Define nuevas clases de eficiencia IE1, IE2 y IE3, que se armonizan a 60 Hz con las normas brasileñas (IE1) y con las actuales normas en EE.UU. para los motores cerrados (EPAct para IE2 y NEMA Premium para IE3), por ejemplo, IP44, IP55, y se basan en el programa UE-CEMEP (EFF1, EFF2) para IE2 e IE1. La clase IE3 introducida a 50 Hz se deriva de la IE2 con aproximadamente un 15 por ciento menos de pérdidas. Esta norma excluye los motores que se han diseñado según IEC 60034-25 (es decir, los motores diseñados especialmente para la alimentación con convertidores), y los motores que son parte integral de aplicaciones (por ejemplo, bombas y ventiladores) [19]. Además, actualmente la IEC está desarrollando las siguientes normas: IEC TS 60034-31: Guía para la selección y aplicación de motores energéticamente eficientes, incluidas las aplicaciones con velocidad variable (publicación prevista en abril de 2010; el segundo borrador está disponible desde abril de 2009). IEC 60034-2-3: Norma de ensayo para máquinas de corriente alterna alimentadas por convertidores (publicación prevista en julio de 2011). Mientras tanto, el Departamento de Energía de los EE.UU. ha impuesto que, a partir del 19 de diciembre de 2010, NEMA Premium se convierta en la norma mínima de eficiencia energética para motores en los Estados Unidos. Para lograr la certificación, el fabricante debe evaluar sus productos en un laboratorio acreditado. Las otras normas (es decir, IEEE 112-B como la norma de ensayo y NEMA MG1 para la clase de eficiencia) permanecen invariables. En los países de la Unión Europea (UE) la situación es distinta: el fabricante es el responsable del cumplimiento de las normas. La certificación de terceros no es obligatoria; sin embargo, los organismos públicos efectuarán auditorías ocasionales del mercado. Si un dispositivo no reuniera los niveles de rendimiento requeridos (y estipulados), el fabricante estará obligado a sacarlo del mercado haciéndose cargo de los costos. El Comité de regulación del diseño ecológico, formado por representantes de los Estados miembros de la UE, votó a favor de una nueva regulación, los requisitos de diseño ecológico en los motores eléctricos, sobre la base de una propuesta de la Comisión Europea. El nuevo reglamento señala la clase de eficiencia. 16.
(24) CAPÍTULO 1 energética IE1 para motores asincrónicos con una potencia de salida de 0,75 kW y 375 kW. La clase de eficiencia IE2 definida en EN/IEC 60034-30 será obligatoria a partir del 16 de junio de 2011, la clase IE3 para motores con una potencia nominal (PN) de 7,5 a 375 kW a partir de 2015 y para los motores con una (PN) comprendida entre 0,75 y 375 kW, en 2017. Un motor de clase IE2 se puede utilizar en lugar de un motor IE3 si se alimenta con un accionamiento con convertidor. La Comisión Europea adoptó esta norma el 22 de julio de 2009. Su alcance es algo diferente al de la norma IEC 60034-30 (por ejemplo, incluye los motores accionados con convertidores). La tabla 1.2 muestra la hoja de ruta de implantación prevista para los diferentes niveles de eficiencia definidos por IEC 60034-30, así como las normas mínimas de eficiencia energética en distintos países [19]. Tabla 1.2. Hoja de ruta de la implantación de los distintos niveles de eficiencia internacionales, de conformidad con IEC 60034-30.. Nivel de eficiencia Eficiencia superior. Clase de eficiencia IEC 60034-30 IE3. Incertidumbre de conformidad con la norma IEC 60034-2-1(2007) Incertidumbre baja. Países que cuentan con el reglamento sobre el rendimiento. EE.UU. (2011) Europa (2015/2017*) Eficiencia alta IE2 Incertidumbre baja EE.UU. Canadá México Australia Nueva Zelanda Brasil (2009) China (2011) Europa(2011*) Suiza (previsto para 2012) Eficiencia estándar IE1 Incertidumbre China mediana Brasil Costa Rica Israel Taiwán Suiza (previsto para 2012) *Previsto para la implementación a escala de eficiencia en la UE: . A partir a del 16 de junio del 2011, todos los motores entre 0.75kW y 375kW deben cumplir los requisitos de eficiencia de la clase IE2.. . A partir del 1ro de enero 2015, los motores con potencia nominales entre 7.5kW a 375 kW no pueden tener una eficiencia inferior al nivel IE3, o deben cumplir los. 17.
(25) CAPÍTULO 1 requisitos de eficiencia de clase IE2, y deben ir equipado con un sistema de accionamiento de velocidad variable (VSD). . A partir del 1ro de enero del 2017 los motores con una potencia nominal entre 0.75 kW a 375 kW no pueden tener una eficiencia inferior al nivel IE·, o deben cumplir los requisito de eficiencia de la clase IE2, y deben ir equipados con un sistema de accionamiento de velocidad variable (VSD).. El grupo de trabajo 31 del IEC TC 2 está desarrollando actualmente una nueva IEC TS 60034-31. Difundió un borrador en el que proponía las definiciones de la clase Super Premium o IE4. La clase IE4 de eficiencia energética no se limita a los motores trifásicos de inducción de jaula como las clases IE1, IE2 e IE3 de EN/IEC 60034-30. En cambio, IE4 está pensada para todo tipo de motores eléctricos, en particular para máquinas alimentadas por convertidor (tanto de inducción de jaula como de otros tipos, como motores síncronos de imanes permanentes). En la actualidad, no existen motores en el mercado que tengan este nivel de eficiencia energética. Esto ilustra con bastante claridad que la normalización puede estar determinando la dirección de la tecnología y el desarrollo de los productos. Justificación de la normalización Hay normas y etiquetas en todas las áreas de apoyo a las políticas de eficiencia energética, especialmente para aplicaciones o productos específicos (como los motores). Normas: . Definen qué es la eficiencia (IEC 60034-2-1).. . Formulan procedimientos de ensayo para medir la eficacia (IEC 60034-2-1).. . Establecen índices y requisitos de eficiencia mínimos necesarios para obtener los diversos certificados y etiquetas de eficiencia voluntarios (EN/IEC 60034-30, NEMA MG1).. . Definen las condiciones de mantenimiento que deben satisfacerse para conseguir una eficiencia elevada (ANSI/EASA AR100, EASA/AEMT).. . Describen los reglamentos y requisitos específicos para industrias o sectores determinados (IEEE 841).. . Impulsan la tecnología y el desarrollo de productos hacia soluciones orientadas a la eficiencia energética (IE4, IEC RS 60034-31).. 18.
(26) CAPÍTULO 1 Condiciones de la IEC previas a la normalización en el área de la eficiencia energética [22]: . Definición clara, razonable y coherente de “eficiencia”.. . Definición de los métodos de ensayo y de medida para la evaluación y la clasificación de la eficiencia.. . Definición de niveles de eficiencia (clases) para productos estándar y básicos.. . Empezar la normalización sólo en las áreas en las que haya un potencial de ahorro importante; dar prioridad a los potenciales elevados.. 1.4.. Las autoridades prescribirán los valores límites obligatorios. Características generales de los datos de catálogos ofrecidos por los fabricantes. En la actualidad la lista de los fabricantes de motores de inducción trifásicos es amplia. El software Motor Master Versión +4.1, última versión registrada es una excelente herramienta para la gestión eficiente de los motores a nivel industrial. Para realizar una caracterización de los datos de catálogos que ofrecen los fabricantes nos apoyamos en la base de datos que cuenta este programa. Además la caracterización se efectuará para una amplia gama de potencias, resaltando en el cuerpo de esta investigación las potencias de 11.19 kW, 37.3 kW y 74.6 kW (15, 50 y 100 HP) respectivamente. La caracterización del resto de los motores se encuentra en los anexos I, II, III [23]. 1.4.1. Visión general del Motor Master Versión +4.1 El Motor Master + Version 4.0 soporta el manejo de las funciones de motores de medianas y grandes instalaciones industriales. Diseñados para auditores de utilidad, los coordinadores pertenecientes a la industria de energía e ingenieros de planta, Motor Master + soporta motores y planificación de sistemas motores a través de identificar la acción más eficiente para una reparación dada o una decisión de compra de un motor. El Motor Master + puede estar usado para identificar motores ineficientes o inventarios de motores de gran tamaño y calcular la energía y los ahorros de demanda asociados con selección o reemplazo del modelo energéticamente eficiente. Motor Master + opera bajo Microsoft Windows e incluye un sistema de ayuda en línea [23].. 19.
(27) CAPÍTULO 1 El programa es accionado por menú, con ayuda abundante sobre la pantalla. Aunque no se posea mucho dominio de la computadora, es muy fácil el uso del Motor Master, nada que se haga erróneo en el teclado puede dañar el programa [23]. El Motor Master + contiene un módulo de inventario de motor en planta, mantenimiento de registro y un rastreador de características. . Una base de datos de información de función y de precio en más de 25 000 motores de la Comisión Electrotécnica Internacional (IEC) y la Asociación Nacional de Fabricantes Eléctricos (NEMA) diseño B, C, y D motores trifásicos. Los motores se extienden desde 1 a 2000 caballos de fuerza (hp), con velocidades de 900, 1200, 1800, y 3600 rpm, y abiertos a prueba de goteo (ODP) y enfriados con ventiladores adjuntos (TEFC), completamente cerrados sin ventilación (TENV), protección de agua (WP), completamente cerrados poco aireados (TEAO), completamente cerrados enfriados en abanico (TEBC) y a prueba de explosión (EXPL). Motores evaluados para operar a 200, 208, 230, 460, 575, 220/440, 796, 2300, 4000, y 6600 voltios son incluidos. Los valores llenos y de rendimiento a carga reducida están medidos de acuerdo al protocolo IEEE 112 para garantizar consistencia. Los fabricantes suministran la información electrónicamente, y la base de datos está periódicamente actualizada [23].. . La característica técnica puede ayudar a optimizar un sistema de accionamiento, como datos en el motor, rendimiento a carga reducida, factor de potencia; la velocidad de carga máxima; rotor bloqueado, desglose, y carga máxima de torsión; y la corriente del rotor libre y bloqueado.. . La información de compra, incluye una lista de precio, el período de garantía, el número del catálogo, el peso motor, y la dirección del fabricante.. . Las características de análisis calculan los ahorros de energía, los ahorros de costo, la simple devolución, los flujos de efectivo y la tasa de rendimiento tras impuestos en la inversión de usar un motor en particular energéticamente eficiente en una nueva compra. Las variables como la eficiencia motora, el precio de compra, costo de la energía, las horas de operación, factor de carga, y los descuentos de utilidad son tomados en consideración.. 20.
(28) CAPÍTULO 1 . La programación de la tasa de utilidad y el descuento del motor en los datos del programa incluyen eficiencia mínima calificada y rebaja en el precio de los valores del costo.. . La contabilidad de la energía, rastreo de ahorros conservacionistas, y reportes de capacidades de reducción de emisiones del gas de efecto invernadero.. . Los menús y las extensivas pantallas de ayuda hacen al Motor Master + fácil para aprender y usar.. 1.4.2. Características de las base de datos Dos bases de datos son usadas en la operación de Motor Master + Version 4.0: La Base de Datos Master y la Base de Datos de la Compañía. Todas las bases de datos están en formato del Microsoft Access. Las tablas dentro de cada base de datos están interconectadas en formas complicadas, y cualquier intento para cambiar datos fuera del Motor Master + podrían dar como resultado incompatibilidad y función deteriorada del programa [23]. Datos que ofrecen los catálogos de los motores que se encuentran en la base de datos del Motor Master Versión +4.1: . La base de datos de los motores incluye la siguiente información cuando está disponible para cada motor: caballos de fuerza, velocidad de sincronización, tipo de carcasa, nombre del fabricante, nombre del modelo, número del catálogo, velocidad a plena carga (rpm) y el peso (lb).. . Voltaje nominal, factor de servicio (Utilidad), la eficiencia (25%,50%,75%,100%) de la carga nominal, factor de potencia (25%,50%,75%,100%) de la carga nominal, y la resistencia del devanado a 25⁰C (Ω).. . Momento a plena carga, momento máximo y momento a rotor bloqueado, corriente a plena carga, corriente de vacío y corriente a rotor bloqueado, el número de barras del rotor y ranuras del estator.. 21.
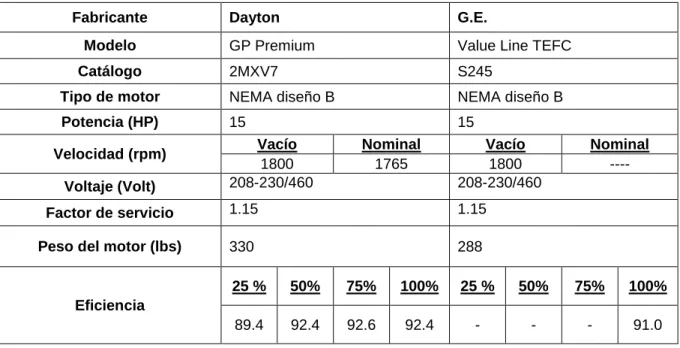
(29) CAPÍTULO 1 Los fabricantes con que cuenta esta base de datos son de prestigio reconocido, estos son: Fabricantes: AO Smith Baldor-Realiance Dayton G.E. Lafert Siemens Tatung Teco/Westinghouse US Motors WEG Electric Motors 1.5.. Caracterización de los datos ofrecidos por los fabricantes para un motor de 11.19 kW (15 HP). La caracterización se efectuó entre los fabricantes Dayton y G.E para un motor de 460 V, 1800 rpm y 11.19 kW (15 HP). En la tabla 1.3 se presentan los datos ofrecidos por los fabricantes. Tabla 1.3. Datos ofrecidos por los fabricantes Dayton y G.E tomados del Software Motor Master V.+4.1. Fabricante. Dayton. G.E.. GP Premium. Value Line TEFC. 2MXV7. S245. Tipo de motor. NEMA diseño B. NEMA diseño B. Potencia (HP). 15. 15. Modelo Catálogo. Velocidad (rpm) Voltaje (Volt). Vacío 1800 208-230/460. Nominal 1765. Vacío 1800 208-230/460. Factor de servicio. 1.15. 1.15. Peso del motor (lbs). 330. 288. Nominal ----. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 89.4. 92.4. 92.6. 92.4. -. -. -. 91.0. Eficiencia. 22.
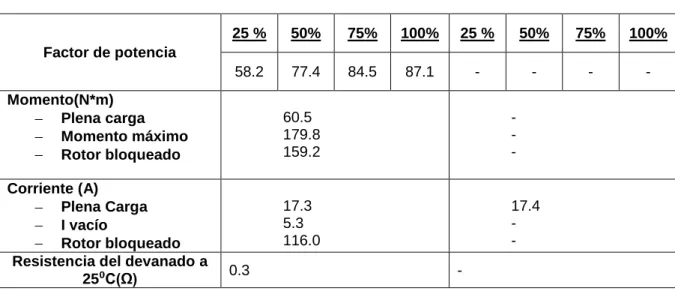
(30) CAPÍTULO 1. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 58.2. 77.4. 84.5. 87.1. -. -. -. -. Factor de potencia Momento(N*m) Plena carga Momento máximo Rotor bloqueado Corriente (A) Plena Carga I vacío Rotor bloqueado Resistencia del devanado a 25⁰C(Ω). 60.5 179.8 159.2. -. 17.3 5.3 116.0. 17.4 -. 0.3. -. Después de analizar los datos ofrecidos por los fabricantes Dayton y G.E se concluye que para un mismo nivel de voltaje, potencia y velocidad existen diferencias en cuanto a: eficiencia, factor de potencia, momentos y corrientes. La Dayton brinda la eficiencia y factor de potencia para todos los estados de carga (25%, 50%,75%,100%), mientras que la G.E solo la eficiencia para el 100%, donde la Dayton lo supera en 1.4% y factor de potencia en ningún estado de carga. En el caso del momento la Dayton ofrece sus tres estados y la G.E ninguno, con las corrientes ocurre algo similar con la diferencia de que la G.E da como dato la corriente de plena carga y la Dayton la de todos los estados señalados. También es importante señalar que la Dayton muestra la resistencia del devanado a 25⁰C 1.5.1. Resultados del análisis efectuado en todos los motores de 11.19 kW Es importante señalar que para un mismo valor de voltaje, potencia y velocidad (460 V, 1800 rpm y 11.19 kW) no todos los fabricantes ofrecen los mismos datos y existe un margen de diferencia entre los mismos. Regularidades encontradas en cuanto a la eficiencia. La tabla 1.4 muestra el rango mínimo y máximo entre los cuales varía la eficiencia para los respectivos estados de carga Tabla 1.4. Rango de eficiencia mínima y máxima. 25 %. 50%. 75%. 100%. 86.3-89.5. 90.2-93.5. 91.0-93.3. 91.0-92.9. 23.
(31) CAPÍTULO 1 De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors solo ofrecen la eficiencia para el estado de carga del 100%.. . Los fabricantes Siemens, Tatung y Teco/Westinghouse brindan la eficiencia para todos los estados de carga excepto el 25%.. Regularidades acertadas en cuanto al factor de potencia: La tabla 1.5 muestra el rango mínimo y máximo entre los cuales varía el factor de potencia para los respectivos estados de carga. Tabla 1.5 Rango del factor de potencia mínimo y máximo. 25 %. 50%. 75%. 100%. 43.0-58.2. 37.0-77.0. 46.0-85.0. 55.0-88.0. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors no ofrecen el factor de potencia para ningún estado de carga.. . Los fabricantes Siemens, Tatung y Teco/Westinghouse brindan todos los estados de carga excepto el 25%.. Regularidades halladas en cuanto al momento: La tabla 1.6 muestra el rango mínimo y máximo entre los cuales varía el momento para los respectivos estados de carga. Tabla 1.6. Rango del momento mínimo y máximo. Momento Plena carga Momento máximo Rotor bloqueado. Rango (N*m) 60.0 - 60.88 109.8 - 226.6 28.5 - 203.9. 24.
(32) CAPÍTULO 1 De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors no ofrecen el momento para ningún estado de carga.. Regularidades encontradas en cuanto a la corriente: La tabla 1.7 muestra el rango mínimo y máximo entre los cuales varía la corriente para los respectivos estados de carga. Tabla 1.7. Rango de corriente mínimo y máximo Corriente Plena carga I vacío Rotor bloqueado. Rango(A) 17.3-29.0 3.0-11.8 54.0-147.3. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors solo ofrecen la corriente a plena carga.. . El fabricante Tatung no ofrece la corriente de vacío.. Regularidades en cuanto a la resistencia del devanado a 25⁰C (Ω): De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes Baldor-Realiance y Dayton son los únicos que ofrecen la resistencia del devanado de armadura a 25⁰C.. 1.6.. Caracterización de los datos ofrecidos por los fabricantes para un motor de 37.3 kW (50 HP). La caracterización se efectuó entre los fabricantes AO Smith y Baldor-Realiance para un motor de 460 V, 1800 rpm y 37.3 kW (50 HP).En la tabla 1.8 se presentan los datos ofrecidos por los fabricantes.. 25.
(33) CAPÍTULO 1 Tabla 1.8. Datos ofrecidos por los fabricantes AO Smith y Baldor-Realiance tomados del Software Motor Master V.+4.1 Fabricante. AO Smith. Baldor-Realiance. Modelo. EPACT. Propósitos Generales. Catálogo. T46038. M4115T. Tipo de motor. NEMA diseño B. NEMA diseño B. Potencia (HP). 50. 50 Vacío 1800. Velocidad (rpm) Voltaje (Volt). Nominal 1765. Vacío 1800. 208-230/460. 230/460. Factor de servicio. 1.15. 1.15. Peso del motor (lbs). 714. 539. Eficiencia. Nominal 1765. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 91.9. 94.0. 93.8. 93.0. 90.1. 93.1. 93.6. 93.2. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 63.0. 80.6. 85.6. 86.5. 52.0. 73.0. 82.0. 86.0. Factor de potencia Momento (N*m) Plena carga Momento máximo Rotor bloqueado Corriente (A) Plena Carga I vacío Rotor bloqueado Resistencia del devanado a 25⁰C(Ω). -. 202.0 545.5 404.0. 202.0 593.9 356.5. 59.0 7.5 181.5. 58.3 21.2 382.0 -. Después de analizar los datos ofrecidos por los fabricantes AO Smith y Baldor-Realiance se concluye que para un mismo valor de voltaje, potencia y velocidad existen diferencias en cuanto a: eficiencia, factor de potencia, momentos y corrientes. El motor de la AO Smith con modelo EPACT tiene una eficiencia superior al motor de la Baldor-Realiance desde un 0.2%-1.8% para los distintos estados de carga, menos el 100% donde dichos valores son similares y para el factor de potencia esa diferencia varía desde un 3.6%11.0% para los distintos estados de carga, menos el 100% donde los valores son similares. En el caso del momento máximo el motor de la Baldor-Realiance supera 48.8 Nm al motor de AO Smith y el momento a rotor bloqueado es superior en el motor de la AO Smith por 48 Nm con respecto al motor de la Baldor-Realiance con modelo Propósitos. 26.
(34) CAPÍTULO 1 Generales. Las corrientes de vacío y rotor bloqueado son superiores en el motor AO Smith 13.7 y 200 A respectivamente con respecto al motor de la Baldor-Realiance. También es importante señalar que el motor de la Baldor-Realiance ofrece como datos la resistencia del devanado a 25⁰C, las barras del rotor y las ranuras del estator. 1.6.1. Resultados del análisis efectuado en todos los motores de 37.3 kW (50 HP) Es importante señalar que para un mismo valor de voltaje, potencia y velocidad (460 V, 1800 rpm y 37.3 kW) no todos los fabricantes ofrecen los mismos datos y existe un margen de diferencia entre ellos. Regularidades detectadas en cuanto a la eficiencia: La tabla 1.9 muestra el rango mínimo y máximo entre los cuales varía la eficiencia para los respectivos estados de carga. Tabla 1.9. Rango de eficiencia mínima y máxima. 25 %. 50%. 75%. 100%. 90.1-93.9. 93.1-95.4. 93.6-95.3. 93.0-95.0. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors solo ofrecen la eficiencia para el estado de carga del 100%.. . Los fabricantes Tatung y Teco/Westinghouse brindan la eficiencia para todos los estados de carga excepto el 25%.. Regularidades percibidas en cuanto al factor de potencia: La tabla 1.10 muestra el rango mínimo y máximo entre los cuales varía el factor de potencia para los respectivos estados de carga. Tabla 1.10. Rango del factor de potencia mínimo y máximo. 25 %. 50%. 75%. 100%. 52.0-63.0. 73.0-80.6. 82.0-86.7. 84.5-88.4. 27.
(35) CAPÍTULO 1 De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors no ofrecen el factor de potencia para ningún estado de carga.. . Los fabricantes Tatung y Teco/Westinghouse brindan todos los estados de carga excepto el 25%.. Regularidades observadas en cuanto al momento: La tabla 1.11 muestra el rango mínimo y máximo entre los cuales varía el momento para los respectivos estados de carga. Tabla 1.11. Rango del momento mínimo y máximo. Momento Plena carga Momento máximo Rotor bloqueado. Rango(N*m) 60.88-200.0 442.5-593.9 356.5-517.0. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors no ofrecen el momento para ningún estado de carga.. Regularidades halladas en cuanto a la Corriente (A). La tabla 1.12 muestra el rango mínimo y máximo entre los cuales varía la corriente para los respectivos estados de carga. Tabla 1.12. Rango de corriente mínimo y máximo. Corriente Plena carga I vacío Rotor bloqueado. Rango (A) 55.6-60.6 7.5-21.2 181.5-382.8. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . Los fabricantes G.E. y WEG Electric Motors solo ofrecen la corriente a plena carga.. . El fabricante Tatung no ofrece la corriente de vacío.. 28.
(36) CAPÍTULO 1 Regularidades encontradas en cuanto a la resistencia del devanado a 25⁰C (Ω): De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: 1.7.. Ninguno de los fabricantes ofrece el valor de la resistencia del devanado. Caracterización de los datos ofrecidos por los fabricantes para un motor de 74.6 kW (100HP). La caracterización se efectuó entre los fabricantes AO Smith y Baldor-Realiance para un motor de 460 V, 1800 rpm y 74.6 kW. En la tabla 1.13 se presentan los datos ofrecidos por los fabricantes. Tabla 1.13. Datos ofrecidos por los fabricantes US Motors y WEG Electric Motors tomados del Software Motor Master V.+4.1. Fabricante. US Motor. WEG Electric Motors. Corro-Duty CF89. NEMA Premium IEEE 841. C100P2C. 100185T3QIE4C. Tipo de motor. NEMA diseño B. NEMA diseño B. Potencia (HP). 100. Modelo Catálogo. 100 Vacío 1800. Velocidad (rpm). Nominal 1780. Vacío 1800. Voltaje (Volt). 460. 460. Factor de servicio. 1.15. 1.15. Peso del motor (lbs). 1250. 1302. Eficiencia. Nominal 1770. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 92.2. 95.1. 95.6. 95.4. -. -. -. 95.4. 25 %. 50%. 75%. 100%. 25 %. 50%. 75%. 100%. 58.9. 78.3. 84.8. 87.1. -. -. -. -. Factor de potencia Momento (N*m) Plena carga Momento máximo Rotor bloqueado Corriente (A) Plena Carga I vacío Rotor bloqueado. 402.2 964.4 660.2. 113.0 33.4 716.9. -. 112.0 -. 29.
(37) CAPÍTULO 1. Resistencia del devanado a 25⁰C(Ω). -. -. Después de analizar los datos ofrecidos por los fabricantes US Motors y WEG Electric Motors se concluye que para un mismo valor de voltaje, potencia y velocidad existen diferencias en cuanto a eficiencia y corrientes. El único estado a comparar en cuanto a la eficiencia es para 100%, ya que el fabricante de la WEG Electric Motors no brinda los datos para los restantes estados de carga, pero los valores a plena carga dados por ambos fabricantes son iguales. En cuanto a la corriente de plena carga el motor de la US Motors supera en 1 A al fabricante de la WEG Electric Motors. El factor de potencia y el torque no se comparan porque el fabricante de la WEG Electric Motors no ofrece esos datos. 1.7.1. Resultados del análisis efectuado en todos los motores de 74.6 kW (100HP) Es importante señalar que para un mismo valor de voltaje, potencia y velocidad (460V, 1800 rpm y 74.6 kW) no todos los fabricantes ofrecen los mismos datos y existe un margen de diferencia entre ellos. Los fabricantes G.E., Dayton, Lafert y Siemens, no presentan motores de los datos que se muestrean. Regularidades percibidas en cuanto a la eficiencia: La tabla 1.14 muestra el rango mínimo y máximo entre los cuales varía la eficiencia para los respectivos estados de carga. Tabla 1.14. Rango de eficiencia mínima y máxima. 25 %. 50%. 75%. 100%. 81.9-95.4. 83.4-95.1. 88.2-95.6. 95.4. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . El fabricante WEG Electric Motors solo ofrece la eficiencia para el estado de carga del 100%.. 30.
(38) CAPÍTULO 1 . Los fabricantes Tatung y Teco/Westinghouse brindan la eficiencia para todos los estados de carga excepto el 25%.. Regularidades encontradas en cuanto al factor de potencia: La tabla 1.15 muestra el rango mínimo y máximo entre los cuales varía el factor de potencia para los respectivos estados de carga. Tabla 1.15. Rango del factor de potencia mínimo y máximo. 25 %. 50%. 75%. 100%. 43.0-58.9. 65.0-80.0. 76.0-85.5. 82.0-87.5. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . El fabricante WEG Electric Motors no ofrece el factor de potencia para ningún estado de carga.. . Los fabricantes Tatung y Teco/Westinghouse brindan todos los estados de carga excepto el 25%.. Regularidades halladas en cuanto al momento: La tabla 1.16 muestra el rango mínimo y máximo entre los cuales varía el momento para los respectivos estados de carga. Tabla 1.16. Rango del momento mínimo y máximo. Momento Plena carga Momento máximo Rotor bloqueado. Rango (N*m) 101.7-402.2 264.42-1003.17 165.43-862.4. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . El fabricante WEG Electric Motors no ofrece el momento para ningún estado de carga.. Regularidades detectadas en cuanto a la corriente: La tabla 1.17 muestra el rango mínimo y máximo entre los cuales varía la corriente para los respectivos estados de carga.. 31.
(39) CAPÍTULO 1 Tabla 1.17. Rango de corriente mínimo y máximo Corriente Plena carga I vacío Rotor bloqueado. Rango(A) 32.2-120.0 14.0-39.4 177.0-725.0. De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: . El fabricante WEG Electric Motors solo ofrece la corriente a plena carga.. . El fabricante Tatung no ofrece la corriente de vacío.. Regularidades atinadas en cuanto a la resistencia del devanado a 25⁰C (Ω): De manera general se destacan en los datos ofrecidos por los fabricantes las regularidades siguientes: 1.8.. Ninguno de los fabricantes ofrece el valor de la resistencia del devanado. Consideraciones finales del capítulo. Las características de comportamiento como: eficiencia, momentos y corrientes para los distintos estados de carga de los motores trifásicos de inducción están determinadas en gran medida por su clase de diseño. Existe una gran diversidad en los datos de catálogos aportados por el fabricante, es posible encontrar una descripción muy detallada en cuanto a las características de su comportamiento, pero también existen fabricantes que apenas ofrecen los datos de chapa por lo que no es posible localizar una generalidad en cuanto a los datos que estos aportan.. 32.
(40) CAPÍTULO 2 CAPÍTULO 2. PROCEDIMIENTO PARA LA DETERMINACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA 2.1. Introducción Los motores de inducción trifásicos con rotor de doble jaula o jaula profunda son muy empleados en la industria, ambos tipos de motores pueden representarse por el modelo circuital doble jaula con precisión adecuada [24],[25]. Con frecuencia solo se cuenta con los datos nominales y las tablas de comportamiento para estados típicos de operación subcargados, nominal y con cierta sobrecarga, lo que dificulta estimar los valores de los parámetros del circuito equivalente. En la última década varios autores, [3],[4],[5],[7], han investigado en la estimación de los parámetros del circuito equivalente del motor cuando se cuenta únicamente con los datos ofrecidos por el fabricante. Se utilizan y comparan modelos capaces de ajustarse lo mejor posible al comportamiento del motor. Muchos de los investigadores proponen en sus métodos, el cálculo de los parámetros para realizar solamente estudios dinámicos, para cuestiones de arranques, ajustes de protecciones, estabilidad, etc. 2.2. Optimización multiobjetivo utilizando NSGA -II El algoritmo genético con solución no dominante (NSGA) [30], se trata de un algoritmo muy eficaz, pero en general se ha criticado por su complejidad computacional, su falta de elitismo y el hecho de elegir el valor óptimo de los parámetros para el intercambio de parámetros σshare. Una versión modificada, NSGA-II [28] fue desarrollada, la cual tiene un algoritmo que implementa una mejor ordenación, incorpora elitismo y ningún parámetro para el intercambio debe ser elegido a priori. Descripción General de NSGA - II La población se inicializa de la manera tradicional como lo implementa el NSGA. Una vez la población es inicializada se ordenada mediante la no dominación en cada frente. El primer frente siendo completamente no dominante se establece en la población actual y el segundo frente siendo dominado por los individuos, en sólo el primer frente y así sucesivamente. A cada individuo en cada frente se le asignan valores de jerarquía o calidad (aptitud física) o en base al frente al que pertenecen. A los individuos del primer frente se les da un valor de 1 y a los individuos en el segundo se les asigna un valor de 2 y así sucesivamente [26].. 33.
Figure
![Figura 1.1.Curvas par-velocidad para los diseños NEMA A, B, C y D e IEC N y H[10] . Los diseños NEMA más importantes son:](https://thumb-us.123doks.com/thumbv2/123dok_es/7376987.464097/13.918.258.655.415.736/figura-curvas-velocidad-diseños-nema-diseños-nema-importantes.webp)



+7



Documento similar
