Modelado de la sincronización de convertidores con la red eléctrica en sistemas de generación eólica
66
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento Electroenergética. TRABAJO DE DIPLOMA Modelado de la Sincronización de Convertidores con la Red Eléctrica en Sistemas de Generación Eólica. Autor: Raudelys Peña Rodríguez E-mail: rpena@uclv.edu.cu Tutor: MSc, Lesyani León Viltre E-mail: lesyani@uclv.edu.cu. Santa Clara 2011 "Año 53 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. La ciencia es para el mundo moderno lo que el arte fue para el antiguo. Benjamín Disraeli. La ciencia más útil es aquella cuyo fruto es el más comunicable. Leonardo da Vinci.
(5) ii. DEDICATORIA. A mi madre María Antonia por su empeño en todos estos años por mi realización profesional, que gracias a su persistencia y apoyo incondicional hoy se cumple su más anhelado sueño. A mi padre Félix por su ayuda, sus consejos, su esfuerzo y su confianza y el sacrificio de abandonar su vida profesional para que sus hijos alcanzaran el mérito de un título universitario. A mis hermanos Raunier, Daylí y Yadamí, a mis abuelas Mima, María y Gladys, mis tíos Nancy y Pedrito, Margot y Alejandro, Iraida, Humberto, Carlos, Jesús y Armando, a mis primos y a todos mis seres queridos..
(6) iii. AGRADECIMIENTOS. A mi tutora MSc. Lesyani León Viltre por la constancia de su apoyo. A todos los profesores que dedicaron su trabajo a mi formación profesional. A Yadamí y Carlitos, Daylí y José Lázaro, Ailema, Melba, Amelia y Miguel Ángel. A Jorge, por compartir conmigo momentos de tristeza y alegría. A todos los que de una forma u otra han colaborado con la realización de este trabajo..
(7) iv. TAREA TÉCNICA. Se propone modelar el comportamiento de sincronización a la red eléctrica de los sistemas de generación eólica mediante el método del PLL (Phase Locked Loop), para su posterior utilización en investigaciones de perturbaciones en la red eléctrica. Además se propone estudiar las variaciones en el funcionamiento del PLL ante perturbaciones de fase y frecuencia en la red.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En los últimos años, las exigencias de los organismos internacionales sobre la reducción de las emisiones de CO2 y la dependencia energética de los países de América Latina han llevado al desarrollo de otras formas de generación eléctrica mediante recursos naturales renovables. Los sistemas distribuidos de generación eléctrica necesitan de tareas de sincronización con la red para que su cometido sea llevado a cabo de una manera efectiva. Este trabajo se centra en el modelado de un método que suministra la información necesaria para la sincronización con la red eléctrica. En este caso se estudiará el PLL (Phase-Locked Loop); que es de vital importancia para seguir la fase y la frecuencia en el proceso de sincronización con la red eléctrica. Se presenta un estudio del su funcionamiento así como sus tipologías y posibles variantes que se pueden presentar. De esta forma, utilizando el Simulink del Matlab como plataforma digital, se presentan mediante simulaciones el comportamiento del PLL..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 2 CAPÍTULO 1.. GENERALIDADES .................................................................................. 3. 1.1. Aerogeneradores acoplados a las redes eléctricas .................................................... 3. 1.2. Referencia histórica de los PLL ............................................................................... 5. 1.3. Teoría de los sistemas de control por realimentación. ............................................. 6. 1.3.1 Aplicaciones de sistemas de control por realimentación ...................................... 7 1.4. Obtención de la secuencia positiva del armónico fundamental ............................... 7. 1.4.1 Necesidad y aplicaciones ...................................................................................... 8 1.4.2 Métodos y algoritmos ........................................................................................... 8 1.5. Funcionamiento de un sistema básico PLL ............................................................ 10. 1.5.1 Comportamiento de un PLL ............................................................................... 11 1.5.2 Enganche y Captura ............................................................................................ 12.
(10) vii 1.6. VSCs conectados como interfaz entre la red y sistemas renovables de energía .... 13. 1.6.1 Convertidores multinivel aplicados a la energía eólica ...................................... 16 1.6.2 VSCs conectados como interfaz entre la red y nuevos sistemas de generación . 16 CAPÍTULO 2. 2.1. MODELADO DE LOS PLLs .................................................................. 18. Obtención de las ecuaciones .................................................................................. 18. 2.1.1. Función de Transferencia................................................................................ 19. 2.1.2. Márgenes de Captura y de Enganche .............................................................. 21. 2.2. PLL para sistemas distribuidos de generación eléctrica ........................................ 26. 2.2.1. Estructura del PLL .......................................................................................... 27. 2.2.2. Modelo contínuo linealizado del PLL ............................................................ 30. 2.2.3. Modelo Discreto del PLL ............................................................................... 33. 2.2.4. Ajuste de las constantes del PLL. ................................................................... 33. 2.2.4.1 Efecto de las perturbaciones de la red en la sintonización del PLL ............ 34 2.2.5 2.3. Influencia del feedforward en el comportamiento del PLL ............................ 35 Detectores de secuencia positiva para conexión de turbinas eólicas a la red ..... 35. 2.3.1. Tipos de detectores de secuencia positiva ...................................................... 36. CAPÍTULO 3.. IMPLEMENTACION EN MATLAB DE LOS MODELOS ............... 40. 3.1. Transformaciones necesarias para la implementación del modelo ........................ 40. 3.2. Construcción de los modelos ................................................................................. 42. 3.3. Resultado de las simulaciones ................................................................................ 45. CONCLUSIONES Y RECOMENDACIONES ................................................................... 49 Conclusiones ..................................................................................................................... 49 Recomendaciones ............................................................................................................. 49 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 51.
(11) viii Anexos .................................................................................................................................. 53 Anexo I. Programas en Matlab ............................................................................... 53.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. Diferentes análisis sobre la tendencia mundial del consumo de energía revelan un considerable aumento de las necesidades energéticas en los próximos años. En estos análisis también se muestra que el empleo masivo de las energías fósiles para abastecer estas necesidades plantea problemas a corto plazo, debidos a la contaminación del medio ambiente y por las limitaciones de estos recursos. El viento es una fuente de energía de la cual el hombre tiene conocimiento desde épocas muy antiguas, aunque curiosamente se ha volcado al uso de energías menos sanas. El aprovechamiento del viento hoy puede sustituir al combustible fósil, evitar el recalentamiento terrestre y parar la gran emisión de millones de toneladas de dióxido de carbono. En los próximos 40 años los seres más evolucionados del planeta habremos logrado retrotraer el clima de la Tierra en unos cuantos cientos de miles de años sino logramos reducir drásticamente la emisión de gases que afectan a la atmósfera. La quema de combustibles fósiles es la principal proveedora de dióxido de carbono, gas que acentúa el denominado "efecto invernadero", al acumularse este gas en la atmósfera, la energía de los rayos solares convertida en temperatura queda retenida, no pudiendo liberarse en su totalidad hacia el espacio, incrementando progresivamente la temperatura del planeta[1]. Con el propósito de solucionar los problemas existentes con la generación y distribución de electricidad, comenzó a mediados de 2005 la Revolución Energética en Cuba. Uno de sus programas fue el fomento de la generación de electricidad mediante fuentes renovables de energía, especialmente la eólica, como contribución a la política de desarrollo sostenible enarbolada por nuestro país. Para estos efectos se creó el Grupo de Ingeniería Eólica en el Grupo Eólico del Ministerio de la Industria Básica (MINBAS), que se encarga de ejecutar todas las tareas referentes al Programa Eólico, adscrito al Grupo de Trabajo para el Impulso.
(13) INTRODUCCIÓN. 2. de la Energía Eólica, que dirige el Consejo de Estado y que cohesiona a diversos institutos, empresas, entidades y universidades relacionados con el tema. En nuestro país existe la intensión de aprovechar este recurso renovable y ya se ha incorporado en el sistema eléctrico cubano como una de las fuentes de generación. Es cierto que la potencia instalada, menor de 10 MW, es poco significativa si se compara con la demanda actual del sistema, 2900 MW en los meses de invierno, sin embargo las perspectivas de crecimiento que existen son altas. Como parte del desarrollo de las energías renovables en Cuba, se ha iniciado un programa eólico muy ambicioso con el que se pretende instalar una potencia considerable en el orden de los cientos de MW. De ello actualmente existen tres parques eólicos interconectados, dos al SEN, Turiguanó y Gibara y el otro, Los Canarreos, al micro sistema de la Isla de la Juventud[1]. El estudio de estos sistemas resulta de gran importancia para su desarrollo futuro en Cuba, por lo que el modelado del PLL,. resultará muy provechoso para el estudio de su. comportamiento ante fluctuaciones en los sistemas de generación eólica conectados a la red. Teniendo en cuenta esto el Objetivo general del trabajo es modelar el PLL para simular su comportamiento en el proceso de sincronización con la red eléctrica. Los objetivos específicos son: 1) Estudiar el estado del arte de los PLL así como su funcionamiento en general. 2) Obtener las ecuaciones de sus principales componentes y la estructura de trabajo. 3) Realizar la simulación y analizar los resultados. Organización del informe Para ello se ha estructurado el trabajo en tres capítulos en el primero se hace un estudio de las generalidades de los PLL. En el segundo capítulo se describen las ecuaciones y los modelos así como su comportamiento en general. Finalmente, en el capítulo 3 se presentan los resultados de la implementación del modelo en el Simulink®™ del Matlab®™ y se presentan los resultados de la simulación..
(14) CAPÍTULO 1. GENERALIDADES. 3. CAPÍTULO 1. GENERALIDADES. El objetivo de los sistemas de control de los convertidores es suministrar o generar en cada instante la potencia demandada de la manera más económica y eficiente posible. El control de los convertidores necesita que el sistema se encuentre sincronizado con la red para alcanzar su propósito. La aparición de un salto en el ángulo de fase de la red, debe ser inmediatamente detectada por el sistema de sincronización para una entrega fiable de potencia. Por otro lado, la sincronización es una tarea muy importante cuando en la red se producen fallas. Durante éstas, el ángulo de la secuencia positiva de la componente fundamental de la red debe ser detectado con fiabilidad para así sincronizar las corrientes, ya que la componente de secuencia negativa influye dando lugar a oscilaciones a una frecuencia doble de la fundamental en el control de variables. Los algoritmos de sincronización deben ser insensibles a las fallas que se produzcan en la red como saltos de fase, cambios de frecuencia, desbalance de tensión, huecos y armónicos. 1.1 Aerogeneradores acoplados a las redes eléctricas Uno de los primeros aerogeneradores que se conectaron a la red eléctrica fue en los Estados Unidos, tenía una potencia nominal de 100 kw y operó entre los años 1931 y 1942. Otro aerogenerador fue instalado en ese mismo país pero este de mayor capacidad 1.25 Mw en 1940. Pero no es hasta la década del 80 que la generación de energía eléctrica experimenta un salto espectacular. Países como Estados Unidos de América y Dinamarca, por mencionar los casos más destacables, han incentivado la generación eléctrica de origen renovable favoreciendo la implantación de los llamados parques o plantas eólicas. Países como Estados Unidos de América, Dinamarca y Alemania, entre otros, han promovido la instalación de grandes máquinas conectadas a las redes.
(15) CAPÍTULO 1. GENERALIDADES. 4. eléctricas, estimándose en la actualidad unos 25.000 aerogeneradores conectados a las redes. Si bien las crisis petroleras de la década del 70 influyeron, en gran medida, en el desarrollo de nuevas tecnologías energéticas, su real penetración en el mercado de la generación eléctrica no hubiera sido posible sin la creación de un marco legal, económico y político, favorable para las inversiones del sector privado, como lo es la ley PURPA en los Estados Unidos de América. Es muy importante destacar este aspecto pues hay muchas regiones en el mundo donde existen condiciones climáticas iguales, o mejores, a las de Dinamarca o Estados Unidos de América, pero sin un marco adecuado, estas inversiones son impensables. Los aerogeneradores de tres palas son quienes dominan el mercado actual de tecnología (solo 3% son Darrieus o bipala). Con potencias que van desde los 50 kw a algo más de 1 MW, se producen en escala totalmente comercial. La gran mayoría utilizan generadores asincrónicos. El tamaño de las máquinas ha ido creciendo con el desarrollo tecnológico, a comienzos de la década del 80 eran usuales potencias entre 30 y 100 kW, actualmente la mayoría de las máquinas que se están instalando tienen potencias entre 400 kW y 1 MW. La mayor máquina de eje horizontal construida hasta la fecha tiene 3,2 MW nominales (100 metros de diámetro) y está en operación en Hawai desde 1987. El costo de la energía generada es comparable a muchos sistemas de generación convencional. Los costos de instalación son también comparables y están en el orden de 1000-1200 $US/kW. Los factores de utilización oscilan entre 15 y 30%, dependiendo del lugar de instalación y del tipo de máquinas. Con el mejoramiento del diseño de los rotores y, sobre todo, con el desarrollo de metodologías para localizar parques eólicos y aerogeneradores, los factores de utilización en las nuevas instalaciones tienden a ubicarse en el orden del 30%, valor que se aproxima al de muchas centrales hidráulicas[2]. El estado de California, en Estados Unidos de América, fue una región piloto para el desarrollo de los parques eólicos. Actualmente en las regiones de Altamont Pass, Tehachapi y San Gorgonio funcionan unos 14.500 molinos entregando más de 2.300 millones de kWh en las redes eléctricas, equivalente a la demanda residencial de una ciudad como San Francisco y economizando unos 430.000 m3 de petróleo por año. El más importante de los parques, Altamont Pass, tiene aproximadamente 7.300 aerogeneradores entre 40 y 750 kW y fue desarrollado por una veintena de empresas.
(16) CAPÍTULO 1. GENERALIDADES. 5. utilizando máquinas de distintos orígenes pero en su gran mayoría norteamericanas y dinamarquesas[2]. 1.2. Referencia histórica de los PLL. La primera referencia histórica nos retrotrae al año 1923 y versa sobre la sincronización automática de dos osciladores[3]; sin embargo la primera referencia al PLL o lazo enganchado en fase como tal, data del año 1932 y fue realizada por investigadores británicos mientras desarrollaban el receptor de conversión directa u homodino[4]. Su uso se vio restringido por décadas, debido a su complejidad y costo económico, a los ámbitos militares y de investigación científica hasta que en la década de 1960 pudo integrarse en un solo chip toda la circuitería de un sistema PLL completo, con lo cual su empleo comenzó a hacerse cada vez mas masivo; la NASA por ejemplo, los aplicó para compensar las variaciones de frecuencia que sufrían las transmisiones desde sus satélites debido a inestabilidades de los componentes y al efecto Doppler. Una plataforma de PLL se emplea en los televisores para sincronizar el barrido de las líneas horizontales con los pulsos de sincronismo de la estación emisora desde 1943; en los receptores actuales se emplean hasta dos lazos completos enganchados en fase, uno para la sincronía de la generación de la señal del barrido de líneas y otro que enganche en fase y frecuencia a la etapa de salida horizontal..
(17) CAPÍTULO 1. GENERALIDADES. 1.3. 6. Teoría de los sistemas de control por realimentación.. Un sistema de control por realimentación, es aquel que tiende a mantener una relación predeterminada entre una variable del sistema y otra, comparando funciones de ambas variables y empleando la diferencia como medio de control. Se comienza a ver el funcionamiento del sistema desde el comparador o detector de error.. Figura 1.1 Esquema de un sistema de control por realimentación. A él ingresaremos una señal o información equivalente a lo que deseamos lograr como resultado de funcionamiento del sistema. Esta información, deberá poseer una exactitud importante, para así obtener un sistema funcionando a un régimen, con un alto grado de precisión. Imaginemos tener un sistema que, en un instante cualquiera, una causa exterior o interior, modifican el régimen de trabajo del mismo. El sistema de control debe reaccionar y comenzar la acción correctiva que le ha sido asignada, actuando con rapidez y precisión. Pero para que ello ocurra, debe existir un elemento que tenga la capacidad de verificar la existencia de ese error. Ese elemento es el Detector de Error, al cual podemos considerar como el componente “inteligente” del sistema, a partir del cual se inicia el proceso de regulación. La acción del detector es comparativa, implicando que debe haber homogeneidad entre las señales sometidas a esa acción, es decir, las señales a comparar deben ser equivalentes entre sí en magnitud y naturaleza, por ejemplo dos señales eléctricas, dos informaciones mecánicas, etc. Captar las variaciones experimentadas por la salida del sistema controlado, implica el uso de un Transductor. Entre los requisitos fundamentales de un buen transductor, están los de tener una adecuada sensibilidad para.
(18) CAPÍTULO 1. GENERALIDADES. 7. reaccionar frente al error, una elevada precisión y buena confiabilidad. Normalmente, la señal de error tomada por el transductor, no posee la suficiente potencia y forma, para excitar directamente al sistema comparador, siendo necesario el uso de conformadores de señal y amplificadores para adaptar las mismas a una magnitud útil para el comparador o detector de error[5]. Resumiendo lo dicho hasta aquí, podemos decir que tenemos una señal que indica el régimen de trabajo del sistema, un elemento ejecutor de la operación deseada; un transductor que toma información de cómo está resultando el funcionamiento y un sistema “inteligente” que es capaz de darse cuenta gracias a este feedback, si debe corregir el régimen de funcionamiento o no, cerrando de esta manera el lazo que forma nuestro Sistema de Control Automático o Servosistema[5]. 1.3.1 Aplicaciones de sistemas de control por realimentación Hablando de ejemplos y aplicaciones típicas de éste tipo de controles, podemos mencionar muchos entre los que se destacarían por ejemplo, los sistemas de sintonía de los TV, los controles de velocidad de los motores de un DVD Player, de un VHS, la generación de la frecuencia de transmisión de una emisora de radio, el control de posición de un brazo mecanizado (robot), un radar, un sonar, un amplificador de audio de buena calidad y una lista interminable de usos donde encontraremos el uso de un sistema retroalimentado. 1.4. Obtención de la secuencia positiva del armónico fundamental. Anteriormente se ha hecho alusión a la necesidad de obtención de la FFPS (Secuencia Positiva del Armónico Fundamental). La sincronización con la red eléctrica y la obtención de la FFPS van íntimamente ligadas, hasta tal punto que en la mayoría de las técnicas utilizadas la segunda lleva implícita la realización de la primera..
(19) CAPÍTULO 1. GENERALIDADES. 8. 1.4.1 Necesidad y aplicaciones La obtención del correcto valor del vector de tensión de la FFPS de la red eléctrica es fundamental para lograr el correcto funcionamiento del sistema de control de los sistemas conectados a la red. Una de las aplicaciones más importantes se centra en las fuentes de generación de energía renovable conectadas a la red mediante convertidores VSC (Voltage Source Converter). Estos convertidores generalmente están controlados mediante ejes de referencia sincronizados con el vector de tensión de la FFPS. Por lo tanto se requieren algoritmos de detección de la FFPS de una manera precisa y rápida. Entre las demás aplicaciones de los algoritmos de detección de la FFPS se pueden citar: filtros activos en paralelo y en serie (para la conexión junto con cargas no lineales o reactivas y compensar así los armónicos producidos por éstas), fuentes de potencia ininterrumpibles, sistemas de almacenamiento de energía, control de FACTS (flexible ac transmission systems) y manejadores de velocidad variable. 1.4.2 Métodos y algoritmos Para la obtención de la FFPS se utilizan técnicas de filtrado para eliminar la presencia de posibles armónicos junto con técnicas de separación de secuencia para detectar desequilibrios. Clásicamente el filtrado se lleva a cabo mediante el uso de un PLL o mediante estructuras con funciones de transferencia paso bajo o paso banda. Las técnicas empleadas en la separación de la secuencia positiva y negativa son bastante variadas. Algunas de ellas se basan en la combinación de señales en cuadratura sincronizadas con los ejes de referencia estacionarios, tal y como lo realiza el ISC (instantaneous symmetrical components), mientras que otras se apoyan generalmente en la aplicación de retardos obteniendo versiones desplazadas de la señal que después se combinarán con esta. El método más sencillo es la utilización de un PLL, el cual es capaz de seguir el vector de tensión de la FFPS tan rápido como sea posible para eliminar los impactos producidos por las fallas de la red[6, 7]. Para obtener la magnitud y la fase del vector de tensión de la red se utiliza el SRF-PLL (synchronous reference frame PLL). El SRF-PLL puede operar de una manera fiable en presencia de armónicos sólo si estos son de órdenes elevados, ya que si se quiere que siga rápidamente al vector de tensión su ancho de banda debe ser razonablemente grande. Sin embargo, debido a que es muy sensible ante.
(20) CAPÍTULO 1. GENERALIDADES. 9. desequilibrios y distorsiones presentes en los sistemas trifásicos, no es adecuado para la obtención de la FFPS. Un comportamiento mejor se puede conseguir usando el DSRFPLL (double synchronous reference frame PLL) que hace uso de una celda de desacoplo para aislar las secuencias positivas y negativas[8]. Se debe implementar un bloque que sea capaz de obtener cualquier otro armónico para ser restado de la tensión original. Sin embargo, el coste computacional se incrementa considerablemente si muchas componentes armónicas deben ser atenuadas. Una técnica alternativa usa el Enhanced PLL o PLL mejorado (EPLL) para cada fase[9]. A cada una de las tensiones de fase se le aplica un EPLL, el cual es capaz de obtener una tensión con un retardo de 90º. Con la tensión de cada fase y su correspondiente tensión de fase retardada se pueden obtener las secuencias positivas y negativas de cada una de las fases usando el ISC. Finalmente, se utiliza un cuarto EPLL a la salida del ISC para estimar la fase de la secuencia positiva. Gracias a los distintos EPLL se elimina la componente fundamental de la secuencia positiva, sin embargo, algunos armónicos pueden cruzar el EPLL, estando así presentes a la salida. Uno de los algoritmos con mejor rendimiento es el basado en un PLL, en una estructura con integradores generalizados de segundo orden (DSOGI) y en el método ISC. La señal trifásica es transformada a los ejes de referencia estacionarios (αβ), aplicando las componentes a la entrada de una estructura, denominada DSOGI-QSG, que se encarga de calcular las señales en cuadratura de las componentes. Las componentes y sus correspondientes señales en cuadratura se aplican al ISC para separar la secuencia positiva de la negativa. Por último, se hace un SRF-PLL que obtiene la fase y la frecuencia del vector de tensión de la FFPS. Esta frecuencia será realimentada hacia el DSOGI-QSG. El DSC (delayed signal cancellation) determina las componentes de las secuencias positiva y negativa basándose en la combinación del vector de tensión de la red en ejes de referencia estacionarios y en una muestra del mismo retardada un cuarto del período fundamental. Aunque el algoritmo ofrece grandes resultados para situaciones desequilibradas sin distorsión alguna, es muy sensible ante la aparición de armónicos en las tensiones de la red. El GDSC (general delayed signal cancellation) es un método para la extracción de la FFPS de una señal trifásica mediante transformaciones matemáticas para la eliminación de armónicos específicos sin la necesidad de utilizar filtros. La señal original en ejes de referencia estacionarios es conducida por varias transformaciones en.
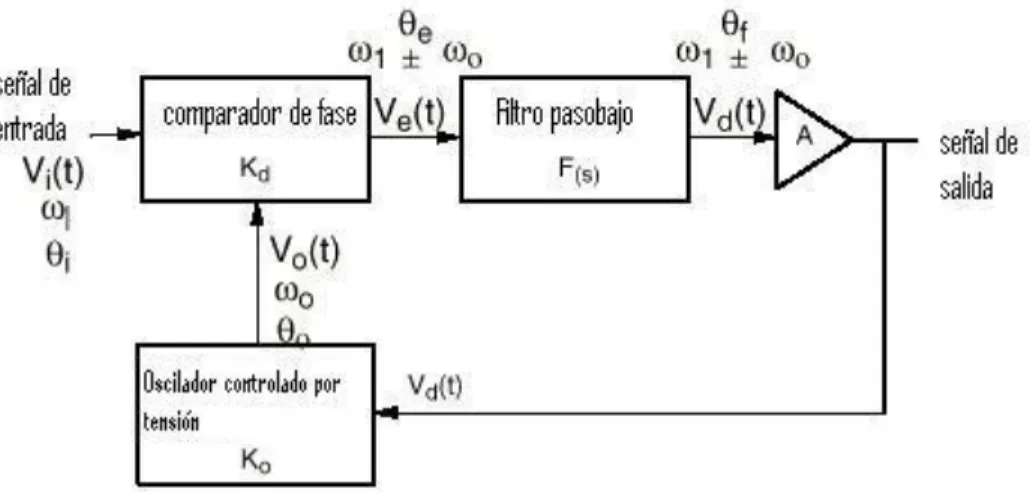
(21) CAPÍTULO 1. GENERALIDADES. 10. cascada que eliminan los armónicos pares y gran parte de los armónicos impares. La ganancia para la componente de la secuencia positiva del armónico fundamental es unitaria. La SVFT (space-vector discrete-time Fourier transform) detecta de una manera rápida y precisa los vectores de secuencia positiva y negativa de la frecuencia fundamental así como las componentes armónicas presente en las señales trifásicas de entrada. Es un método adecuado para aplicaciones en tiempo real donde la señal está seriamente desequilibrada y distorsionada. El método consiste en aplicar la FFT al vector de tensión de la señal de entrada en ejes de referencia estacionarios, obteniendo de vectores complejos que dan información de la amplitud y fase de las componentes positiva y negativa de los armónicos presentes. 1.5. Funcionamiento de un sistema básico PLL. El oscilador enganchado en fase es un sistema de realimentación consistente en un comparador de fase, un filtro pasobajo, un amplificador de la señal error y un oscilador controlado por tensión (VCO) en el camino de la realimentación.. Figura 1.2 Diagrama de bloques de un sistema básico PLL. Quizás el punto más importante a tener en cuenta cuando diseñamos el PLL es que es un sistema de realimentación como cualquier otro y, de lo que se deduce, que está caracterizado matemáticamente con las mismas ecuaciones que aplican a los otros sistemas de realimentación más convencionales. Sin embargo, los parámetros de las ecuaciones son algo diferentes ya que en los PLLs la señal de error de realimentación es.
(22) CAPÍTULO 1. GENERALIDADES. 11. un error de fase mientras que en los convencionales es una señal error de voltaje o corriente. 1.5.1 Comportamiento de un PLL Cuando no hay señal aplicada a la entrada del sistema, la tensión Vd (t) que controla el VCO tiene un valor cero. El VCO oscila a una frecuencia, “f0” (o lo que es equivalente en radianes Wo) que es conocida como frecuencia libre de oscilación. Cuando se aplica una señal a la entrada del sistema, el detector de fase compara la fase y la frecuencia de dicha señal con la frecuencia del VCO y genera un voltaje de error Ve (t) que es proporcional a la diferencia de fase y frecuencia entre las dos señales. Este voltaje de error es entonces filtrado, ampliado, y aplicado a la entrada de control del VCO. De esta manera, la tensión de control Vd (t), fuerza a que la frecuencia de oscilación del VCO varíe de manera que reduzca la diferencia de frecuencia entre “f0” y la señal de entrada “fi”. Si la frecuencia de entrada “fi” está suficientemente próxima a la de “f0”, la naturaleza de la realimentación del PLL provoca que el oscilador VCO sincronice y enganche con la señal entrante. Una vez enganchado, la frecuencia del VCO es idéntica a la de la señal de entrada a excepción de una diferencia de fase finita. Esta diferencia de fase neta es Fe, donde: Fe = F0 - Fi es la diferencia de fase necesaria para generar el voltaje de error corrector Vd para conseguir el desplazamiento de la frecuencia libre del VCO para igualarse a la frecuencia “fi” de la señal de entrada y así mantener el PLL enganchado. Esta capacidad de autocorrección del sistema también permite al PLL "encarrilar" los cambios de frecuencia con la señal de entrada una vez se ha enganchado. La gama de las frecuencias sobre las que el PLL puede mantener el enganche con una señal de entrada se define como “gama de enganche o cierre” del sistema. La banda de las frecuencias sobre las que el PLL pueden engancharse con una señal de entrada conocida como “gama de captura” del sistema y nunca es menor que la gama de enganche[9]..
(23) CAPÍTULO 1. GENERALIDADES. 12. Otros medios de describir la operación del PLL están en observar que el comparador de fase es en realidad un circuito multiplicador que mezcla la señal de entrada con la señal del VCO. Esta mezcla produce una gama de frecuencias que son sumas y diferencias de frecuencias (fi+fo) y (fi-fo). Cuando el bucle está enganchado (fi = fo, entonces fi + fo= 2fi y fi - fo=0); de ahí que, a la salida del comparador de fase solamente tengamos una componente DC. El filtro paso bajo anula la componente de frecuencia suma por estar (fi + fo) fuera de su ancho de banda pero deja pasar la DC que se amplifica entonces y ataca al VCO. Observar que cuando el bucle está enganchado, la componente diferencia de frecuencia es siempre DC, de tal manera que la gama de enganche es independiente del flanco del ancho de banda del filtro paso bajo. 1.5.2 Enganche y Captura Consideremos ahora el caso en que el bucle no está aún enganchado. El comparador de fase mezcla nuevamente las señales de la entrada y del VCO produciendo componentes suma y diferencia de frecuencia. Sin embargo, la componente diferencia puede caer fuera del ancho de banda del filtro paso bajo y anularse al mismo tiempo con la componente de frecuencia suma. Si este es el caso, no se transmite ninguna información al VCO y este permanece es su frecuencia libre inicial. Cuando la frecuencia de entrada se aproxima a la del VCO, la componente diferencia de frecuencias disminuye y se acerca el borde de la banda del filtro paso bajo. Ahora alguna componente de la diferencia de frecuencias pasará, haciendo que la frecuencia del VCO se acerque a la frecuencia de la señal de entrada. Esto, producirá a la vez, que disminuya la frecuencia de la componente diferencia lo que permite a su vez que pase más información a través del filtro paso bajo hacia el VCO. Esto es esencialmente un mecanismo de realimentación positiva que provoca que el VCO enganche con la señal de entrada. Teniendo en cuenta lo dicho, podríamos definir de nuevo el término “gama de captura” como “la gama de frecuencia alrededor de la cual, la frecuencia libre inicial del VCO puede enganchar con la señal de entrada”. La gama de captura es una medida de qué frecuencias de señal de entrada debemos tener para enganchar al VCO. Esta “gama de captura” puede llegar a tener cualquier valor dentro de la gama de enganche y depende en primer lugar del flanco del.
(24) CAPÍTULO 1. GENERALIDADES. 13. ancho de banda del filtro paso bajo y en segundo lugar de la ganancia del lazo-cerrado del sistema. Es este fenómeno de captura de señal, el que le da al bucle, las propiedades selectivas de frecuencia. Es importante distinguir la “gama de captura” de la “gama de enganche” que puede, nuevamente, definirse como “la gama de frecuencias normalmente centradas alrededor de la frecuencia inicial libre del VCO por el que el lazo puede encaminar a la señal de entrada una vez logrado el enganche”. Cuando el lazo está enganchado, la componente diferencia de frecuencia a la salida del comparador de fase (voltaje error) es DC y pasará siempre a través del filtro paso bajo. Así, la gama de enganche estará limitada por la gama de voltaje de error que puede generarse y la correspondiente desviación de frecuencia producida por el VCO. La gama de enganche es esencialmente un parámetro DC y no está afectada por el ancho de banda del filtro paso bajo. 1.6. VSCs conectados como interfaz entre la red y sistemas renovables de energía. Un VSC („Voltage Source Converter‟) de dos niveles (Figura 1.3) conectado a una red eléctrica con tensión de línea de 2.3KVrms, el valor nominal de la tensión DC será aproximadamente: 3400V ≈ 2.3KV * 2, lo que implica que se precisa un IGBT o IGCT de 6500V (máxima tensión de bloqueo en directo del dispositivo ≈1.5... 2.0 * uDCbase).Con los semiconductores actuales no es posible conectar un VSC de dos niveles a una red de mayor tensión de línea sin emplear transformadores. Siempre que sea posible se debe evitar el uso de transformadores, y por tanto se hace necesario recurrir a nuevas topologías que sean capaces de manejar mayores tensiones.. Figura 1.3 VSC de dos niveles conectado a la red eléctrica a través de un filtro L.
(25) CAPÍTULO 1. GENERALIDADES. 14. Estas nuevas topologías son los convertidores multinivel y matriciales. Un ejemplo es el convertidor que se muestra en la Figura 1.4. Se trata de un VSC de tres niveles de diodos limitadores, también denominada NPC. Para esta topología, esta misma tensión se puede manejar con IGBTs o IGCTs de 3300V. A su vez, estos dispositivos son capaces de manejar mayores corrientes que un IGBT o IGCT de 6500V, lo que supone que el convertidor maneja mayores potencias sin necesidad de emplear transformadores.. Figura 1.4 VSC de tres niveles NPC conectado a la red eléctrica a través de un filtro LCL. Las aplicaciones de este tipo de convertidores son diversas, por ejemplo: Industria: Excitación de motores, bombas, etc. que se pueden encontrar en industrias productoras de cemento, industrias de producción de papel, industrias petroquímicas, etc. Transmisión y distribución de energía: parques eólicos, HVDC, STATCOMs, filtros activos, UPS de alta potencia[10]. Tracción: Convertidores del lado de la red y convertidores del lado de la máquina. Los VSCs trifásicos se pueden comportar como rectificadores (VSR „Voltage Source Rectifier‟) o como inversores (VSI – „Voltage Source Inverter‟) en función del sentido que tenga la transferencia de energía. Por tanto, se trata de una estructura completamente bidireccional. Cuando están conectados a la red eléctrica reciben el nombre de rectificadores PWM („Pulse Width Modulation‟), rectificadores activos, rectificadores „boost‟, „active front end‟, etc. Esta estructura tiene numerosas ventajas frente a los rectificadores no controlados o controlados basados en diodos rectificadores o tiristores,.
(26) CAPÍTULO 1. GENERALIDADES. 15. respectivamente. Algunas de éstas son: menor rizado del DC-bus con condensadores menores, control del flujo de potencias activa y reactiva entre la red eléctrica y el convertidor, reducción de la distorsión armónica de la corriente de la red eléctrica, desplazamiento del factor potencia (DPF) controlable, etc. El control del flujo de la potencia activa permite realizar funciones de regeneración, y por otro lado el control del flujo de la potencia reactiva permite fijar el desplazamiento del factor de potencia y si es necesario, dependiendo de la aplicación del VSC, compensar potencia reactiva. Debido a estas ventajas y al aumento en los requerimientos de reducción de armónicos de la corriente de línea, alta eficiencia, posibilidad de regeneración, etc., el uso de los rectificadores activos cada vez se está extendiendo más en aplicaciones de distribución y transmisión de energía eléctrica, de interfaz entre la red eléctrica y máquinas de corriente alterna de alta potencia, de interfaz entre la red eléctrica y sistemas de energía renovables, etc. El VSC (Figura 1.5) trabaja como etapa interfaz con la red eléctrica, principalmente para obtener una baja distorsión armónica de la corriente AC (igr) y un desplazamiento de fase controlable en la tensión de salida del convertidor con respecto a la tensión de red ( eg r ). Desde el punto de vista del balance de potencia, esto significa que el armónico fundamental de las potencias activa y reactiva debería ser controlado y los otros armónicos de las potencias activa y reactiva deberían ser cero. Además el VSC usado como rectificador activo trabaja también como etapa interfaz con la carga DC. Así, el VSC debe ser controlado para tener una componente DC controlable de la tensión del DC-bus, uDC, y los otros armónicos cerca de cero, independientemente que la carga DC sea lineal, no lineal, pasiva o activa.. Figura 1.5 VSC usado como rectificador activo.
(27) CAPÍTULO 1. GENERALIDADES. 16. 1.6.1 Convertidores multinivel aplicados a la energía eólica En los últimos años, la energía eólica es la tecnología de generación de energía eléctrica que más rápidamente está creciendo a nivel mundial, concretamente a una velocidad media anual de un 40%. Se trata de una energía renovable segura y limpia comparada con el combustible fósil o la energía nuclear, y además en la actualidad comienza a tener un coste competitivo comparado con las energías anteriormente comentadas[10]. Actualmente, la mayoría de las turbinas eólicas, también denominadas aerogeneradores, son de velocidad variable debido a la capacidad de capturar energía en el punto óptimo con reducidas fluctuaciones de la potencia que se entrega a la red, menos estrés mecánico y menos ruido aerodinámico. Además incrementan la eficiencia en un rango de 3% a 28%, dependiendo de las condiciones y los parámetros de diseño, comparada con las turbinas de velocidad fija. El funcionamiento de la turbinas de velocidad variable es posible gracias a convertidores basados en Electrónica de Potencia, que actúan como interfaz entre las variaciones del viento y la red eléctrica cuyas características son constantes. Para manejar estos rangos de potencia es recomendable el uso de convertidores multinivel. Concretamente, los más empleados son los VSCs multinivel de diodos limitadores como el que se muestra en la Figura 1.4 lo que reduce la corriente y las pérdidas del sistema para la misma potencia. Por tanto se reduce la posibilidad de fallos que es muy importante, especialmente en instalaciones „offshore‟, donde el transporte resulta caro y muy difícil. Así, los convertidores multinivel son un elemento fundamental en las turbinas eólicas denominadas „Multi-Megawatt‟. Otra ventaja muy importante de emplear convertidores multinivel es la reducción del filtro de línea, puede llegar a ser de un 45%, lo que implica menor tamaño y coste. 1.6.2 VSCs conectados como interfaz entre la red y nuevos sistemas de generación El sector eléctrico mundial está experimentando una compleja reorganización, impulsada por tecnologías energéticas más limpias, eficientes y sostenibles. Como consecuencia, se está produciendo un importante cambio en la estructura tecnológica de la generación eléctrica, con fuertes incrementos tanto de la potencia instalada como de la producción mediante sistemas basados en gas natural y en energías renovables. Esta evolución permitirá a corto plazo diversificar el modo de generación, caminando hacia sistemas de.
(28) CAPÍTULO 1. GENERALIDADES. 17. generación distribuida. Los problemas técnicos que deben superarse para la implantación de este modelo energético son importantes. De un lado debe dotarse a todos los puntos de generación, de convertidores de potencia, controlados electrónicamente, por ejemplo VSCs como los representados en la Figura 1.4, de modo que dispongan de la posibilidad de ajustar los parámetros básicos de la energía que entregan a la red. El inconveniente de emplear los VSCs como interfaz entre el sistema de generación y la red eléctrica es la sensibilidad de éstos ante perturbaciones de la red como armónicos, tensiones desbalanceadas, „dips‟, etc. Por esta razón deben estar dotados de sistemas de protección rápidos y eficaces, capaces de cumplir y/o mejorar la normativa vigente para interconexión a red y actuación ante perturbaciones en la misma..
(29) CAPÍTULO 2. MODELADO DE LOS PLLs. 18. CAPÍTULO 2. MODELADO DE LOS PLLs. El sistema PLL forma parte del circuito de sincronización de los sistemas de generación eólica y la red. Su función principal es detectar la frecuencia y el ángulo de fase de la red, para ordenar al controlador vectorial de corriente y así sincronizar de manera efectiva. Además tiene como misión filtrar los armónicos procedentes de la red, aunque se debe llegar a un acuerdo en cuanto a la velocidad con que se desea sincronizar y la cantidad de armónicos que se desea filtrar. 2.1. Obtención de las ecuaciones. El circuito PLL es un sistema realimentado cuyo objetivo principal consiste en la generación de una señal de salida con amplitud fija y fase coincidente con la de entrada, dentro de un margen determinado, donde se puede considerar a los elementos que componen al PLL como ideales. La fase de entrada es comparada con la de salida mediante un detector de fase, el cual saca a su salida una señal que depende de la diferencia de ambas fases. Esta señal es filtrada posteriormente para eliminar el contenido de alta frecuencia para posteriormente aplicarse a un oscilador controlado por tensión, que trata de corregir la diferencia entre ambas tensiones. Comprende tres etapas fundamentales tal y como muestra la Fig.1.2: ● Detector de fase: Suministra una salida en tensión que depende del valor absoluto del desfasaje entre las señales de salida y de entrada. En algunos casos, esta etapa está constituida por un multiplicador. Su salida viene expresada por:. vd t k d r t 0 t k d * e t . 2.1.
(30) CAPÍTULO 2. MODELADO DE LOS PLLs. 19. donde r es la fase de referencia del PLL, 0 la fase de salida de VCO, e es el error de fase y k d es la constante del detector y tiene unidades de v/rad. El error de fase del detector está limitado por el margen dinámico del detector de fase a unos pocos radianes, y la máxima exclusión de la salida a unos poco voltios. ● Filtro: Existe libertad en la elección del mismo. Suele ser un filtro paso-bajo destinado a la transmisión de la componente de baja frecuencia de la salida de la etapa anterior. Está definido por su función de transferencia en el dominio de Laplace:. F s . Vc s Vd s . 2.2. ● Oscilador controlado por tensión (VCO): Genera la tensión de salida, con frecuencia dependiente de la tensión de salida del filtro. Generalmente viene definido por un constante de proporcionalidad k v , denominada constante del VCO, y por una pulsación Wc 0 denominada pulsación central de VCO. La frecuencia y fase de la señal de salida son:. f 0 t f c 0 kv vc t 0 t wc 0t 2kv vc t dt t. 0. 2.3. donde la constante del VCO tiene Hz/v como unidades. Se puede observar que la frecuencia de la señal de salida varía linealmente con la salida de tensión del filtro.. 2.1.1. Función de Transferencia. El análisis dinámico de los sistemas de control generalmente es llevado a cabo mediante el estudio de la función de transferencia. El primer paso para la obtención de dichas ecuaciones es referir las bases de referencia del VCO a la frecuencia central de este último:. 0 t wc0 t 0 t . 2.4. r t wc 0 t r t Sustituyendo en la ec. (2.1) se obtiene la respuesta del detector de fase y su transformada de Laplace:.
(31) CAPÍTULO 2. MODELADO DE LOS PLLs. vd t k d r t 0 t vd s k d r s 0 s . 20 2.5. Comparando las ec. (2.3) y (2.4) se obtiene la expresión de 0 y su transformada de Laplace: t. 0 t 2k v vc t dt 0 s 2k v 0. vc s s. 2.6. Como se indicó anteriormente, el VCO se encargaba de corregir las diferencias de fases entre las dos señales. Esto está muy relacionado con el carácter integrador del mismo. La tensión que lleva la información del desfasaje es la pendiente de la fase de salida. Cuanto mayor sea el desfasaje mayor será la pendiente, lo que significa que el VCO hará cambiar más rápidamente la fase de la señal de salida. Sustituyendo la tensión de control obtenida después del filtrado, la fase de salida queda de la forma:. 0 s 2k v. F s v d s F s r t 0 t 2k v k d s s. 2.7. Despejando el cociente entre la fase de salida y la de referencia se obtiene la función de transferencia del lazo:. H s . 0 s k F s r s 1 k F s . 2.8. donde k 2kd kv Un aspecto importante a destacar es que la función de transferencia no relaciona tensiones o corrientes de entrada y salida, sino fases. Esto significa que una señal de fase continua corresponde a una tensión de entrada de frecuencia fija e igual a la de referencia del lazo. Una última función utilizada en el análisis del PLL es la de transferencia en lazo abierto:. Gs s . 0 s kFs r s s. 2.9.
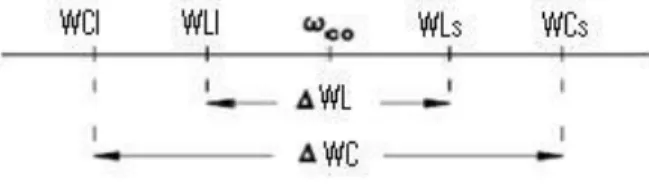
(32) CAPÍTULO 2. MODELADO DE LOS PLLs. 21. Esta función determina el comportamiento del lazo. Es interesante destacar el carácter integrador de la función de transferencia en lazo abierto, con un polo en el origen, creado por el VCO, cuya tensión de control define la frecuencia de salida y, por tanto, la derivada de la fase. La fase es entonces proporcional a la integral de la tensión de entrada. 2.1.2. Márgenes de Captura y de Enganche. Cuando el PLL está fuera de sintonía, a frecuencia de señal de entrada muy alta o bien muy baja, la tensión de salida adopta la pulsación central. wc 0 .. Existe una banda de. frecuencias [ wL margen de enganche, lock range] entre las que el PLL esta en sintonía, caracterizada por wr w0 , dentro del cual el PLL, previamente enganchado, permanece en estas condiciones ante variaciones pequeñas de la pulsación de entrada, y otra entre las que el circuito es capaz de sintonizar ( wC margen de captura, capture range). El margen de captura es siempre superior al de enganche y ambos están centrados respecto a la pulsación central.. Figura 2.1 Márgenes de captura y de enganche. En todo el estudio se admitirá que detector de fase es un multiplicador y suponiendo que tanto la señal de entrada como salida son tonos puros como se indica la expresión (2.1), entonces su tensión de salida es:. vd t k m vr v0 sinwr t r sinw0 t 0 . 2.10. k d cosw0 t wr t 0 r cosw0 t wr t 0 r . vr t Vr sinwr t r . 2.11.
(33) CAPÍTULO 2. MODELADO DE LOS PLLs. 22. v0 t V0 sinw0 t 0 donde la constante del detector de fase se puede escribir como:. kd km. Vi V0 2. El filtro utilizado para el estudio es un filtro paso-bajo de orden 1.. F s Siendo. . 1 1 s. 2.12. la constante de tiempo del filtro.. La señal de salida comprende dos componentes con pulsaciones w0 wr y. w0 wr. .Cuando el PLL está fuera de sintonía ( w0 wr y w0 wr 1 ) ambas se sitúan en la banda atenuada del filtro, la tensión de salida de éste es prácticamente nula y la pulsación de la señal de salida se fija en wco . Por el contrario, si el PLL está sintonizado. ( w0 wr ). una de las dos componentes anteriores es casi continua y, a través del VCO modifica la frecuencia de la señal de salida. Como la salida del filtro depende del desfase 0 r , la realimentación impone que, en régimen permanente las señales de salida y entrada tengan un desfase dependiente de la desviación de frecuencia w0 wc 0 . • Margen de enganche. Partiendo del supuesto de que el bucle está sintonizado la salida del multiplicador es:. vd k d cos0 r cos2t 0 r . 2.13. Tensión que comprende dos componentes: una continua y otra con frecuencia doble a la de entrada. Admitiendo que esta última resulte suficientemente atenuada por el filtro, la tensión de salida y la pulsación de oscilación del VCO son, respectivamente:. vd k d cose . 2.14.
(34) CAPÍTULO 2. MODELADO DE LOS PLLs. 23. w0 wc 0 k cose Mientras el bucle esté sintonizado, la pulsación de salida sólo puede variar entre los siguientes límites. wLS wc 0 k. wLI wc 0 k. 2.15. o lo que es análogo, el PLL permanece sincronizado dentro del margen siguiente:. wL wLS wLI 2k f L . wL 2. 2.16. denominado margen de enganche (lock range). • Margen de captura. Como el proceso de captura sucede en un régimen transitorio, la determinación de los límites entre los que se produce es tediosa, aunque puede recurrirse a procesos iterativos e introducir hipótesis simplificadoras. La captura implica que la componente de frecuencia f 0 f r de salida del multiplicador se sitúe en la banda paso del filtro; por ello, su tensión de salida se puede aproximar según la ec. (2.17). Por otra parte, el PLL sintoniza a una frecuencia relativamente próxima a su valor natural.. vc . kd 1 w0 wr 2 2. cos w0 t wr t e f. . 2.17. con f arctanw0 wr . Supóngase que se parte de una pulsación de entrada muy alejada de la natural. w. r. wc 0 1 de manera que el PLL esté fuera de sintonía w0 wc 0 y que se vería. progresivamente wr acercándose hacia wc0. En el momento de la captura, en primera aproximación y como máximo:.
(35) CAPÍTULO 2. MODELADO DE LOS PLLs. vc . 24. kd 2.18. 1 w0 wr 2 2. Por tanto, la pulsación de la tensión de salida pasa a ser:. k. w0 wc 0 . 2.19. 1 w0 wr 2 2. o bien,. wr wc 0 . k 2.20. 1 wr wc 0 2 2. Haciendo uso de la aproximación 2k 1 se determinan la expresión contenida en (2.21) que obtiene la solución:. wr wc 0 . 1. . 4 2 k 2 1 1 k wc 0 2 . 2.21. Una nueva iteración produce los resultados de (2.22) y (2.23) que confirman la solución.. vf . wr wc 0 . kd 4 2 k 2 1 1 2 k 4 2 k 2 1 1 2. wc 0 . 2.22. k . Por tanto, las pulsaciones límite de captura son:. 2.23.
(36) CAPÍTULO 2. MODELADO DE LOS PLLs. wCS wc 0 . wCI wc 0 . 25. k 2.24. k. . La captura o sintonía del PLL se realiza dentro del margen siguiente:. wc wCS wCI 2. k. . f C . wc 2. 2.25. denominado margen de captura (capture range). Cuando el PLL está sintonizado, la ec. (2.17) degenera en la ec. (2.26). La variación de la tensión de salida del filtro y de la desviación de pulsación con el desfase existente entre las señales de salida y entrada se representa en la Fig.2.2.. vc k d cose w0 wc 0 k v vc wc 0 k cose . 2.26. Dicha característica de transferencia presenta una doble utilidad. Por una parte, determina el valor de la tensión de salida del filtro en función del desfase entre las señales de entrada y salida del PLL. Por otra parte, define el desfase entre ambas señales en función de la desviación de frecuencia cuando el PLL está sintonizado.. Figura 2.2Tensión de salida del filtro y desviación de pulsación en función del desfase con PLL sintonizado.
(37) CAPÍTULO 2. MODELADO DE LOS PLLs. 2.2. 26. PLL para sistemas distribuidos de generación eléctrica. El correcto funcionamiento del controlador vectorial de corriente de los VSC (Voltage Source Converter) de los sistemas distribuidos de generación de energía depende de la exactitud con la que el sistema se sincroniza con la red eléctrica, lo que está relacionado con detectar de forma exacta los vectores de flujo y/o tensión de red[11, 12]. En la figura 2.3 a) se representa el diagrama de bloques de los controladores de un VSC conectado a la red eléctrica mediante un filtro L. El controlador de corriente trabaja en los ejes dq, y para eso es necesario realizar las trasformaciones que en el próximo capítulo se hace referencia. Estas transformaciones están sincronizadas con el ángulo θ, que es la salida del bloque PLL de la Fig 2.3 b). Para facilitar el control del VSC, esta transformación se realiza, normalmente, de forma que el eje d coincida con la integral del vector de tensión (flujo de la red), y así ed=0 y eq= e g ; de forma que la potencia activa (Pg.) se controla con la componente q de la corriente de red mientras que la potencia reactiva (Qg) se controla con la componente d de la corriente de red. El correcto funcionamiento del controlador vectorial de corriente depende de la exactitud con la que se obtenga el ángulo k (Fig 2.3 a). Esta es la razón por la que es muy importante emplear un método óptimo de sincronización, a partir del cual obtener la información exacta de la fase y frecuencia de la componente fundamental de la secuencia positiva de la red [11,12]. Una de las características fundamentales de cualquier algoritmo de sincronización es que debe ser capaz de responder de forma óptima a las distintas perturbaciones de la red eléctrica..
(38) CAPÍTULO 2. MODELADO DE LOS PLLs. 27. Figura 2.3 a) VSC conectado a la red eléctrica mediante filtro L. b) Diagrama de bloques de las transformaciones de ejes que precisa el controlador vectorial de corriente.. Con la actual tecnología de microcontroladores y DSPs, todas las funciones de los PLLs clásicos se pueden implementar mediante funciones software. Los PLLs software tienen numerosas ventajas con respecto a los PLLs hardware[12], una de éstas es la posibilidad de modificar las constantes „on-line‟, lo que permite realizar control adaptativo, a partir de la identificación de diferentes perturbaciones de la red eléctrica. Las funciones concretas del PLL dependen de la aplicación del VSC y de los controladores asociados al PLL. En general, para un VSC conectado a la red eléctrica, y que trabaja como circuito regenerativo, son: 1. Sincronización exacta del controlador de corriente del VSC con la fase de la tensión de la red eléctrica. 2. Control orientado de flujo. 3. Separación de las secuencias positiva y negativa de la red eléctrica. 4. Rápida respuesta en presencia de perturbaciones. 5. Si la red tiene armónicos, sincronización con el armónico fundamental de la secuencia positiva de la señal de red. 2.2.1 Estructura del PLL La Fig. 2.4. a) muestra el diagrama de bloques del PLL que se describe en este apartado junto con un detector de secuencias. Es muy común el uso de estos detectores antes del.
(39) CAPÍTULO 2. MODELADO DE LOS PLLs. 28. PLL, para proporcionarle a éste una señal limpia de distorsiones. El funcionamiento se resume en los siguientes pasos: • Medida y muestreo de las tensiones de red ea (t), eb (t) y ec (t) para obtener ea (k), eb (k) y ec (k). • Transformación de las tensiones de red muestreadas a los ejes αβ, obteniendo e k y e k . • Transformación de los ejes αβ a los ejes dq (edq (k)) • El filtro del PLL es un PI discreto. 0 edp edp es la entrada, y la salida es el incremento de la velocidad angular de la tensión de la red eléctrica ̂ k . • ˆ es la fase estimada de la red, la cual se obtiene integrando ̂ k . El encargado de realizar esta función es el VCO. • El valor de ˆk se limita por software entre 0 y 2 , obteniendo ˆk . • ˆk se usa para calcular las nuevas componentes dq. El objetivo es que edp sea cero, y el resto de variables dq (eqp, edn, eqn) sean constantes.. Figura 2.4 a) Diagrama de bloques del PLL junto con método de separación de secuencias b) Método para la separación 'on line' de secuencias.
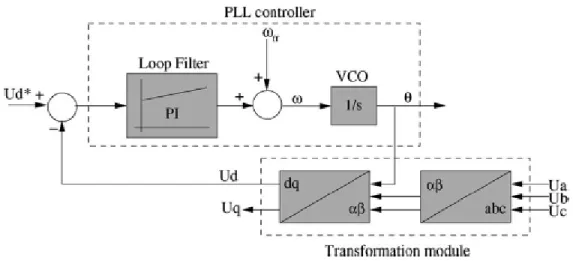
(40) CAPÍTULO 2. MODELADO DE LOS PLLs. 29. En la mayoría de los casos, el PLL es implementado en los ejes de referencia síncronos dq y recibe el nombre de Synchronous Reference Frame – PLL ó SRF – PLL. Su esquema es el mostrado en la Fig. 2.5, en el cual se sincroniza con la componente d de la tensión de red. Se utiliza un controlador (normalmente proporcional – integral o PI ya que se obtiene un comportamiento satisfactorio en la regulación de variables DC[13] para controlar la variable con la que se va a sincronizar el sistema (d o q), y la salida de este controlador es la frecuencia de la red. Después de la integración de la frecuencia de la red se obtiene el ángulo de la tensión de red, que es aplicado en el módulo de la transformación dq para realizar la transformación a los ejes de referencia síncronos.. . Figura 2.5 Estructura general del PLL en ejes dq para sistemas trifásicos. Este algoritmo consigue un buen rechazo a los armónicos de la red, huecos y cualquier otro tipo de perturbaciones, pero se necesitan mejoras adicionales para superar los desequilibrios de la red. En el caso de fallos de tensión asimétricos, los segundos armónicos producidos por la secuencia negativa se propagarán a través del PLL y se reflejarán en el ángulo de fase extraído. Para evitar esto, se necesitan diferentes técnicas de filtrado para que la secuencia negativa sea filtrada. En consecuencia, el PLL puede estimar correctamente el ángulo de fase durante condiciones de desequilibrio de las tensiones de red..
(41) CAPÍTULO 2. MODELADO DE LOS PLLs. 30. 2.2.2 Modelo contínuo linealizado del PLL Las tensiones de la red se pueden expresar como:. ea t V cos 2 eb t V cos 3 2 ec t V cos 3 . . 2.27. Donde V es el valor de pico de la tensión de fase y es la fase de la tensión de red. t .La transformación a los ejes dqp (secuencia positiva) en el PLL es:. . . . . edqp KV sen ˆ j cos ˆ Donde. K. 3 (transformación 2. . 2.28. invariante en potencia) y ˆ es la fase estimada por el PLL. A. la hora de realizar la sintonización, es posible utilizar cualquiera de las dos señales en ejes dq. En caso de realizar el enganche utilizando como entrada al PLL la señal en el eje d, la señal utilizada es:. . edp KVsen ˆ. . 2.29. Cuando ˆ 0 , entonces edp=0 y eqp=KV. En condiciones ideales de funcionamiento kem=eq= 400v.Si ˆ 0 , edp se expresa como:. edp KVsen. 2.30. La ecuación anterior es una ecuación no lineal, porque la componente d de la secuencia positiva de la tensión de la red (edp) es función del seno de la diferencia entre los ángulos actual y estimado. Para simplificar el análisis se obtiene un modelo continuo linealizado, que consiste en suponer que es suficientemente pequeño como para poder realizar la siguiente aproximación:. edp KV. 2.31.
(42) CAPÍTULO 2. MODELADO DE LOS PLLs. 31. La potencia aparente en la red se define, en los ejes dq y con transformación invariante en potencia, como:. S g Pg jQ g edpidp eqpiqp j edpiqp eqpidp . 2.32. Cuando el PLL sigue la fase de la tensión de red, el error es igual a cero 0 , de forma que edp=o. Cuando esto ocurre la potencia activa Pg. se controla con la componente q de la corriente de red (Pg.=eqpiqp), mientras que la potencia reactiva Qg se controla con la componente d de la corriente de red (Qg= eqpidp). El error es igual a cero en los puntos de enganche del PLL que utilizando la componente d para realizar la sincronización coincide con desfases entre el ángulo actual y estimado de. ˆ n siendo n= 0, 1,2... . Si se realiza el enganche utilizando como entrada al PLL la señal en el eje q:. . eqp KV cos ˆ. . 2.33. Al igual que en el caso anterior, la ec (2.33) puede linealizarce para diferencias pequeñas entre ángulo actual y estimado de la forma: eqp KV . 2.34. Así cuando el PLL se engancha (el error es igual a cero), eqp=0. Esto ocurre para. ˆ . 2. n , siendo n=0, 1,2... Cuando el PLL está enganchado, la potencia activa. se controla con la componente d de la corriente de red, mientras que la potencia reactiva se controla con la componente q, es decir, Pg.= edpidp y Qg= -edpiqp. La linealización del PLL consiste en sustituir el bloque no lineal de transformación. dq por la ec. (2.31) si se utiliza la componente d, y el resultado es el lazo de control que se muestra en la Fig. 2.6..
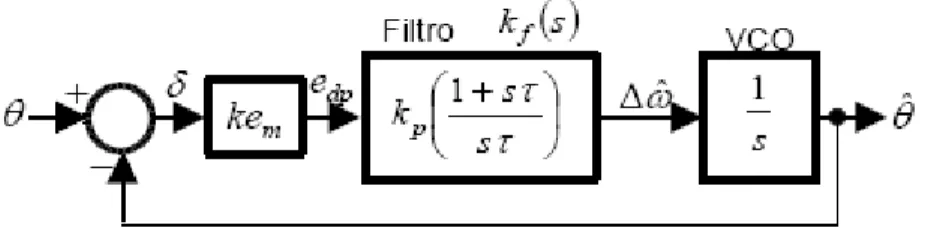
(43) CAPÍTULO 2. MODELADO DE LOS PLLs. 32. Figura 2.6 Modelo continuo linealizado del PLL.. La función de transferencia en lazo cerrado de la Fig. 2.6 en el plano s es:. H c s . k f s kv ˆs s s k f s kv. 2.35. Donde ˆs y s son las transformadas de Laplace de ˆ y respectivamente. Hay varios métodos para diseñar el filtro del lazo (kf(s)), pero una buena opción es diseñarlo de tal forma que Hc(s) sea una función de segundo orden infraamortiguada. Así, para conseguir esto, la función de transferencia de kf(s) la de un controlador PI, de la forma: 1 s k f s k pPLL s . 2.36. donde k pPLL y k iPLL = k pPLL / son las constantes proporcional e integral del PI, respectivamente. A partir de la ecuación anterior, la función de transferencia en lazo cerrado del lazo de control de la Fig. 2.5 se puede reescribir como:. H c s . 2 n s n. 2. s 2 2 n s n. 2. 2.37. donde, identificando la ec. (2.35) con la ec. (2.37), n y toman los valores:. n . . k pPLL kv. 2.38. . k pPLL kv 2 n. . k pPLL kv 2.
(44) CAPÍTULO 2. MODELADO DE LOS PLLs. 33. 2.2.3 Modelo Discreto del PLL Puesto que el PLL se implementa en plataformas digitales como DSPs o FPGAs, es necesario llevar a cabo la discretización del sistema. La Fig. 2.7 muestra el modelo discreto linealizado del PLL, donde TS es el período de muestreo que toma un valor de. TS 200s .La planta (VCO),. T ˆz S es la transformada Z mediante el método ˆ z z 1. ZOH de la planta VCO continua de la Fig. 2.6. La función de transferencia del controlador discreto es k d z k pPLL. z PLL y se diseña de forma directa en el plano discreto z 1. mediante técnicas basadas en el lugar de las raíces en el plano z.. Figura 2.7 Modelo discreto linealizado del PLL. 2.2.4 Ajuste de las constantes del PLL. Según las funciones del PLL enumeradas en la introducción de este apartado, el objetivo es que el PLL sea capaz de seguir muy rápidamente las variaciones de la fase de la red y que a la vez tenga buenas características de filtrado. Sin embargo, estas características no son compatibles y hay que adoptar una solución de compromiso entre las dos. Además, en el diseño del PLL también hay que tener en cuenta el entorno donde está ubicado, es decir, aplicación del VSC, tipo de controlador de corriente y tipo de perturbaciones a las que va a estar sometido[7].. . . El diseño de kf (s) está basado en un análisis en pequeña señal donde sen ˆ se. . . aproxima por ˆ .El comportamiento del PLL se puede especificar mediante los parámetros. . y. n , que definen el amortiguamiento y el ancho de banda (por tanto el. tiempo de establecimiento), respectivamente. Cada pareja de valores de estos dos.
(45) CAPÍTULO 2. MODELADO DE LOS PLLs. 34. parámetros se corresponde unívocamente con un par de polos conjugados de la función de transferencia en lazo cerrado, como se muestra a continuación:. Z1, 2 e Donde. s1, 2Ts. Ts jd Ts. e e. e. e Ts y nTs n. nTs jnTS 1 2. e. e j. 2.39. 1 2. Desde este punto de vista, el denominador de la función de transferencia se puede escribir como:. Dz z 1z z 2 z 2 2 cos z 2. 2.40. Por otro lado, desde el punto de vista de los bloques empleados, el denominador de la función de transferencia en lazo cerrado es:. Dz z 2 2 kVk pPLLTS z 1 kVk pPLLTS PLL. 2.41. Comparando las ecs. (2.40) y (2.41) se obtiene:. k pPLL . . . 2 1 e nTS cos nTS 1 2 TS kV. 2.42. PLL . . 1 e 2nTS. . 2 1 e nTS cos nTS 1 2. . 2.2.4.1 Efecto de las perturbaciones de la red en la sintonización del PLL Como se indicó anteriormente la sintonización de un PLL es un decisión de compromiso entre el tiempo de respuesta del mismo y la capacidad de filtrado. Ambas características pueden ser controladas mediante el parámetro n . Para valores muy elevados de dicho parámetro el sistema será muy rápido, y para valores muy pequeños el sistema se comportará como un filtro paso bajo. Cuando en la red se producen fallas o posee un contenido armónico elevado, es conveniente que el ancho de banda del PLL usado en tareas.
Figure



+7



Outline
Documento similar
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Proporcione esta nota de seguridad y las copias de la versión para pacientes junto con el documento Preguntas frecuentes sobre contraindicaciones y
[r]
Contraindicaciones: El uso de la mascarilla está contraindicado para los pacientes y los miembros de sus familias, profesionales sanitarios y compañeros de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
