Diseño del generador de una turbina hidrocinética de pequeña escala
128
0
0
Texto completo
(2) PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE ESCUELA DE INGENIERÍA. DISEÑO DEL GENERADOR DE UNA TURBINA HIDROCINÉTICA DE PEQUEÑA ESCALA. JOSÉ FRANCISCO ARRAU SOZA. Tesis presentada a la Comisión integrada por los profesores:. LUCIANO EDUARDO CHIANG SÁNCHEZ JUAN DIXON ROJAS MARIO ALBERTO FERNÁNDEZ FERNÁNDEZ CARLOS ALBERTO BONILLA MELÉNDEZ. Para completar las exigencias del grado de Magíster en Ciencias de la Ingeniería. Santiago de Chile, julio, 2016.
(3) A mi familia. iii.
(4) AGRADECIMIENTOS. Muchas gracias a todos los que me ayudaron, en especial a todos los que trabajan en la división de mecatrónica del DICTUC. Especialmente a Fernando Martínez ya que sin su ayuda, su experiencia en el diseño mecánico y su empuje, no hubiese podido sacar adelante este enorme proyecto. Gracias a mis padres, que me apoyaron y me dieron la tranquilidad para poder hacer un trabajo de excelencia y a la Fran, por acompañarme y escucharme tantas veces. Gracias a mi profesor guía, Luciano Chiang, por creer en mí, en que podía diseñar y fabricar esta turbina. Gracias por sus consejos, porque siempre estuvo dispuesto a escucharme y por arriesgar todo en esta apuesta que podría no haber resultado bien. Le quiero agradecer especialmente a José Santiago Aldunate porque me ayudó a entender todo lo básico del ámbito eléctrico que no comprendía por ser alumno de mecánica y por todo lo que me ayudó en los ramos del magíster. Siempre estuvo dispuesto a escuchar mis dudas y sin su ayuda esta tesis no sería lo que es. Gracias también a la gente del taller de mecánica de la universidad, ya que gracias a ellos encontré la pasión por las ciencias, por la ingeniería práctica. También me ayudaron a fabricar parte del estator, lo cual les agradezco enormemente.. iv.
(5) INDICE GENERAL Pág. INDICE DE TABLAS ......................................................................................................ix INDICE DE FIGURAS ...................................................................................................... x RESUMEN...................................................................................................................... xii ABSTRACT ................................................................................................................... xiii 1 INTRODUCCIÓN .......................................................................................................... 1 1.1 Descripción del proyecto ......................................................................................... 1 1.2 Motivación............................................................................................................... 2 1.3 Antecedentes previos ............................................................................................... 3 1.4 Estructura de la tesis ................................................................................................ 6 1.5 Objetivos ................................................................................................................. 7 1.6 Hipótesis .................................................................................................................. 8 2 SELECCIÓN DEL TIPO DE TURBINA ....................................................................... 9 2.1 Selección del tipo de turbina ................................................................................... 9 2.2 Selección del tipo de generador............................................................................. 11 2.2.1 Introducción ................................................................................................ 11 2.2.2 Selección del tipo de sistema ...................................................................... 11 2.2.3 Selección del tipo de generador .................................................................. 12 2.2.4 Selección de la topología ............................................................................. 12 2.2.5 Estator con los dientes en diagonal ............................................................. 14 2.2.6 Selección de la configuración de los imanes ............................................... 15 2.2.7 Conexión a la fuente de consumo ............................................................... 17 2.2.8 Selección de la cantidad de fases y del tipo de conexión ............................ 17 2.2.9 Selección del tipo de bobinado.................................................................... 18 2.2.10 Selección de las combinaciones útiles a evaluar ....................................... 19. v.
(6) 2.2.10.1 Oscilación del torque ........................................................................... 19 2.2.10.2 Factor de bobinado ............................................................................... 20 2.2.10.3 Número de ranuras por polo por fase ................................................... 21 2.2.11 Contenido armónico .................................................................................. 26 2.2.12 Resumen del proceso de selección ............................................................ 27 3 DISEÑO DE LA TURBINA ......................................................................................... 29 3.1 Análisis hidronidámico de las aspas ...................................................................... 29 3.1.1 Introducción ................................................................................................ 29 3.1.2 BEM ............................................................................................................ 29 3.1.2.1 Teoría de la cantidad de movimiento ..................................................... 29 3.1.2.2 Teoría del elemento de aspa ................................................................... 32 3.1.2.3 Análisis .................................................................................................. 33 3.1.3 Selección del perfil alar ............................................................................... 33 3.1.4 Software desarrollado .................................................................................. 37 3.2 Análisis mecánico del aspa propuesta ................................................................... 38 3.3 Análisis Eléctrico .................................................................................................. 39 3.3.1 Proceso de optimización.............................................................................. 39 3.3.1.1 Introducción ........................................................................................... 39 3.3.1.2 Descripción del software FEMM ........................................................... 39 3.3.1.3 Pre-procesamiento.................................................................................. 40 3.3.1.4 Procesamiento ........................................................................................ 44 3.3.1.5 Post-procesamiento ................................................................................ 44 3.4 Cálculos de costos ................................................................................................. 64 3.4.1 Costo del acero ............................................................................................ 64 3.4.2 Costo del cobre ............................................................................................ 65 vi.
(7) 3.4.3 Costo del imán ............................................................................................. 65 3.4.4 Resumen ...................................................................................................... 65 3.5 Análisis térmico ..................................................................................................... 65 3.6 Optimización ......................................................................................................... 69 3.6.1 Introducción ................................................................................................ 69 3.6.2 Descripción del programa ........................................................................... 69 3.6.2.1 Entrehierro ............................................................................................. 70 3.6.2.2 Número de imanes y bobinas ................................................................. 70 3.6.2.3 Diámetro interior de los imanes ............................................................. 70 3.6.2.4 Separación entre los imanes ................................................................... 70 3.6.2.5 Distancia entre las cabezas de los dientes .............................................. 71 3.6.2.6 Altura de la cabeza del diente y ángulo de bajada ................................. 72 3.6.2.7 Espesor del rotor .................................................................................... 72 3.6.2.8 Espesor del estator ................................................................................. 73 3.6.2.9 Factor de llenado .................................................................................... 73 3.6.2.10 Variables de optimización.................................................................... 73 4 Resultados ..................................................................................................................... 75 4.1 Aspas ..................................................................................................................... 75 4.1.1 Potencia generada teórica ............................................................................ 75 4.1.2 Resistencia mecánica del aspa ..................................................................... 76 4.2 Generador .............................................................................................................. 76 4.2.1 Introducción ................................................................................................ 76 4.2.2 Proceso de Optimización ............................................................................. 77 4.2.3 Características del prototipo ........................................................................ 78 4.2.3.1 Características geométricas .................................................................... 78 vii.
(8) 4.2.3.2 Características eléctricas ........................................................................ 78 4.2.4 Comparación entre la medición experimental y el software de optimización .............................................................................................................................. 79 4.2.5 Proceso de fabricación ................................................................................ 86 4.2.5.1 Fabricación y diseño del cuerpo de la turbina ....................................... 86 4.2.5.2 Fabricación del estator y rotor ............................................................... 86 4.2.5.3 Fabricación de las aspas ......................................................................... 87 4.3 Costos .................................................................................................................... 88 5 CONCLUSIONES ........................................................................................................ 90 5.1 Futuras líneas de investigación.............................................................................. 90 5.2 Conclusiones a la hipótesis.................................................................................... 91 5.3 Conclusiones de los objetivos ............................................................................... 91 6 BIBLIOGRAFÍA .......................................................................................................... 94 7 ANEXOS ...................................................................................................................... 98 7.1 Costos .................................................................................................................... 98 7.1.1 Palas ............................................................................................................ 98 7.1.2 Estator.......................................................................................................... 99 7.1.3 Rotor ............................................................................................................ 99 7.1.4 Estructura .................................................................................................. 100 7.1.5 Costos fijo anual ........................................................................................ 100. viii.
(9) INDICE DE TABLAS Pág. Tabla 2.1 Posibles configuraciones para generador de cinco fases ................................. 23 Tabla 2.2 Posibles configuraciones sistema trifásico....................................................... 25 Tabla 2.3 Configuraciones con Ct = 1 ............................................................................. 25 Tabla 3.1 Conductividad térmica ..................................................................................... 66 Tabla 4.1 Comparación entre los valores medidos y calculados ..................................... 80 Tabla 4.2 Comparación entre ambas formas de simular .................................................. 81. ix.
(10) INDICE DE FIGURAS Pág. Figura 1.1 Turbina de eje horizontal ................................................................................. 1 Figura 2.1 Prototipo final de la turbina mareomotriz ....................................................... 10 Figura 2.2 Topologías de generadores síncronos de imanes permanentes. ...................... 13 Figura 2.3 Estator con los dientes rectos (a) y en diagonal (b) ........................................ 15 Figura 2.4 Configuración interior o exterior del rotor ..................................................... 16 Figura 2.5 Bobinado distribuido (izquierda) y concentrado (derecha) ............................ 18 Figura 2.6 Flujo magnético en motor con 8 polos y 9 bobinas ........................................ 22 Figura 2.7 Factor de bobinado en relación al número de polos ....................................... 26 Figura 2.8 Contenido armónico del voltaje teórico del prototipo fabricado .................... 27 Figura 2.9 Esquema resumen del proceso de selección ................................................... 28 Figura 3.1 Volumen de control y velocidades en la teoría de la cantidad de movimiento .......................................................................................................................................... 30 Figura 3.2 Elemento de aspa ............................................................................................ 32 Figura 3.3 Perfil NACA 4415 .......................................................................................... 33 Figura 3.4 Coeficientes de arrastre (arriba) y sustentación (abajo) reales del perfil NACA 4415 .................................................................................................................................. 35 Figura 3.5 Comparación entre perfil real y X-Foil NACA 4415, Re=250.000 ............... 36 Figura 3.6 Parámetros de optimización de TURBEM ..................................................... 37 Figura 3.7 Análisis de esfuerzos del aspa ........................................................................ 38 Figura 3.8 Geometría simulada en programa FEMM ...................................................... 42 Figura 3.9 Curva de saturación acero silicoso M19 (fuente: FEMM) ............................. 43 Figura 3.10 Curva intrínseca y normal imán N42M ........................................................ 43 Figura 3.11 Mallado automático típico ............................................................................ 44 Figura 3.12 Modelo eléctrico del generador .................................................................... 45 Figura 3.13 Esquema de cálculo del enlazamiento de flujo ............................................. 46 Figura 3.14 Sección del estator con flujo máximo ........................................................... 47 x.
(11) Figura 3.15 Contenido armónico en función de la densidad de flujo magnético ............. 48 Figura 3.16 Valor de la fundamental en función de la densidad de flujo magnético ....... 49 Figura 3.17 kf en función de B ......................................................................................... 50 Figura 3.18 Ajustes para 39 bobinas ................................................................................ 51 Figura 3.19 Análisis de convergencia .............................................................................. 52 Figura 3.20 Sección del generador ................................................................................... 54 Figura 3.21 Inductancia en función de la posición del rotor ............................................ 56 Figura 3.22 Voltaje v/s inductancia ................................................................................. 56 Figura 3.23 Variación de la inductancia .......................................................................... 58 Figura 3.24 Espira en torno a un diente del generador .................................................... 60 Figura 3.25 Pérdidas del acero silicoso M19 a 1T en función de la frecuencia ............... 62 Figura 3.26 Pérdidas del acero silicoso M19 a 43,9 Hz en función del flujo magnético máximo............................................................................................................................. 63 Figura 3.27 Análisis térmico del generador ..................................................................... 68 Figura 3.28 Cálculo del espesor del rotor ........................................................................ 72 Figura 4.1 Potencia vs Velocidad Angular ...................................................................... 75 Figura 4.2 Resultados del proceso de optimización ......................................................... 77 Figura 4.3 Montaje experimental ..................................................................................... 79 Figura 4.4 Comparación ente potencia hidráulica y eléctrica .......................................... 82 Figura 4.5 Voltaje real fase neutro vs FEMM.................................................................. 83 Figura 4.6 Voltaje con carga resistiva .............................................................................. 83 Figura 4.7 Distorsión armónica de la corriente resultante ............................................... 84 Figura 4.8 Voltaje en función de la velocidad angular .................................................... 84 Figura 4.9 Campo magnético del prototipo ..................................................................... 85 Figura 4.10 Fabricación del Estator ................................................................................. 87 Figura 4.11 Fabricación de las aspas................................................................................ 88 Figura 4.12 Costo de cada turbina en función de la cantidad anual fabricada ................. 89 Figura 5.1 Comparación del prototipo con la literatura ................................................... 93. xi.
(12) RESUMEN. En esta tesis se diseñó, fabricó y testeó en laboratorio una turbina mareomotriz de eje horizontal para ser instalada en comunidades alejadas sin acceso a la red eléctrica. Se diseñaron las aspas usando Turbem (basado en BEM, blade element momentum) de tal manera de maximizar la potencia mecánica y minimizar el diámetro, para un canal de 2,3 m/s de velocidad promedio del agua y una generación de 5 kW. Conociendo la curva de potencia en función de la velocidad angular, se diseñó un generador de acoplamiento directo capaz de extraer la energía del aspa. Primero se establece una topología que sea de mínimo costo y de fiabilidad adecuada, considerando que se pueda utilizar en instalaciones marítimas alejadas de la costa. Se propone un modelo para calcular la potencia máxima del generador y su costo en función de cinco variables geométricas: el diámetro, la profundidad, el ancho del diente, el largo del diente y el espesor del imán. Con ese modelo se pudo realizar un proceso de optimización para minimizar el costo del generador, sujeto a la producción de 5 kW y que fuera térmicamente viable. Como resultado, el costo de operación de la turbina en todo su ciclo de vida resultó menor al de un generador diésel. La turbina fabricada resultó cercana al óptimo. Se validó el modelo teórico mediante la comparación experimental, encontrándose una buena concordancia. El prototipo sirvió también para probar técnicas constructivas que se presentan en la tesis y servirá en el futuro para realizar pruebas que permitan desarrollar una solución para la obtención viable de la energía mareomotriz.. Palabras Claves: acoplamiento directo, mínimo costo, turbina mareomotriz, generador síncrono de imanes permanentes.. xii.
(13) ABSTRACT. In this thesis, a horizontal axis tidal turbine was designed, built, and tested in laboratory conditions. The purpose is to install it on isolated communities without grid connection. The blades were designed using Turbem software (based on blade element momentum theory) looking for maximum power and minimal diameter, for a 2.3 m/s channel and a 5 kW generator. Using the power versus angular velocity curve it is possible to design a direct drive generator that satisfies the required speed and torque characteristics. The first stage begins with defining a topology, emphasizing low cost and high reliability. Then a mathematical model was developed to predict the power output and the cost of the turbine with five design variables: diameter, tooth width, tooth length, depth and magnet thickness. With this model an optimization routine was implemented that minimizes the cost, subject to a 5 kW generation and thermal restrictions. The main result is that the operating cost of the whole life of the turbine is lower than the diesel option. The resulting turbine is near optimal. The mathematical model was compared with experimental tests, finding good agreement. In addition the prototype was used to test constructive techniques shown on this thesis, for future tests to help develop custom solutions that allows a cost-effective way to extract tidal energy.. Keywords: direct-drive, minimal cost, tidal turbine, permanent magnet synchronous generator (PMSG).. xiii.
(14) 1. 1 INTRODUCCIÓN 1.1 Descripción del proyecto El proyecto llevado a cabo consiste en el diseño y fabricación de una turbina hidrocinética capaz de producir 5 kW de potencia eléctrica, para instalarla en comunidades donde no tengan acceso a la red y cuya principal alternativa de generación es mediante diésel. Muchas comunidades disponen en su cercanía de ríos y canales de regadío pero no tienen una diferencia de altura suficiente para poder instalar una turbina clásica tipo Pelton o similar. En estos casos, se necesita de una turbina diseñada para operar con muy poca o sin diferencia de altura. De todos los tipos de turbinas existentes, se estudia una del tipo horizontal completamente sumergida, como se puede ver en la Figura 1.1, la cual no requiere de diferencia de altura para operar.. Figura 1.1 Turbina de eje horizontal En el cuerpo de la tesis se puede revisar el proceso de selección de esta tecnología. El principal objetivo del trabajo es minimizar el costo de la turbina para todo su ciclo de vida. Esto implica que no solo se debe minimizar el costo de la inversión inicial sino que.
(15) 2. también se deben considerar los costos de mantención, lo cual para turbinas en este rango de potencia resultan relevantes comparados con el costo inicial. Considerando lo anterior, la tesis plantea que es posible diseñar una alternativa de generación de electricidad para las comunidades sin acceso a la red que sea más económica que el generador diésel.. 1.2 Motivación La principal motivación es reducir los costos de la energía para comunidades alejadas, entregando una solución viable a largo plazo, aprovechando sus recursos naturales y produciendo el menor impacto ambiental posible. El segundo pilar que motiva este desarrollo es la utilización de energías que alteren lo menos posible el ecosistema y el entorno donde son instaladas. La utilización de generadores diésel produce gases de efecto invernadero además de contaminación acústica y visual. Las turbinas hidrocinéticas por el contrario no generan ningún tipo de contaminante atmosférico durante su vida útil (si durante su fabricación) y no generan ruido atmosférico. Los problemas ambientales que puede generar son principalmente dos: la contaminación del agua, producto de las grasas usadas en los rodamientos, y el daño físico que las aspas en revolución puedan ocasionar a los animales que viven en el agua. Por esto, en el diseño final utilizará grasas que sean biodegradables y en cuanto al daño a la vida acuática ocurre que, como la velocidad angular nominal de la turbina es del orden de dos revoluciones por segundo y el flujo que se forma es helicoidal, es esperable que los peces puedan pasar a través de la turbina sin sufrir daños. De todas maneras, es necesario implementar en un futuro mediciones del daño real que podría generar, y evaluar la conveniencia de instalar una malla que cumple la función de proteger a los peces y proteger las aspas. En tercer lugar, se buscó desarrollar una turbina que permita la investigación y el desarrollo de tecnologías que puedan ser utilizadas en la obtención de energía mareomotriz, lo cual posee varias implicancias en el diseño, que serán revisadas más adelante..
(16) 3. 1.3 Antecedentes previos La energía de los océanos presenta un potencial de generación de 100 GW a nivel mundial. Por esta razón, existen intereses de países como el Reino Unido o Estados Unidos en potenciar fuertemente la investigación en este tipo de tecnologías, pero por el momento no ha podido escalar debido a que continúa siendo muy costosa, y los desarrollos existentes no han podido pasar de la fase de desarrollo al ámbito comercial (Bilgili et al, 2015). Se reconoce la energía mareomotriz como una de las fuentes renovables más promisorias para futuros desarrollos, principalmente porque es muy predecible, teniendo ciclos establecidos de aproximadamente 6 horas que se producen por las variaciones de las masas de agua que entran y salen de golfos debido a que sube o baja la marea. Dentro de la enorme gama de sistemas existentes de conversión de energía de las mareas, los que han tenido un mayor desarrollo son las turbinas de eje horizontal (Yuce y Muratoglu, 2015). La razón de esto queda explicada más adelante, en el capítulo de selección de tecnología, pero tiene estrecha relación con que, dentro de las tecnologías existentes, las turbinas de eje horizontal presentan el mejor factor de potencia. Considerando esto, se ve que es interesante estudiar este tipo de sistemas de conversión de energía en particular por sobre los demás. Una de las principales razones por las cuales los desarrollos de turbinas de este tipo no han logrado instaurarse a nivel comercial de forma estable, es porque los costos de mantención y operación son aún muy altos. Los problemas existentes con la durabilidad de los componentes son críticos, siendo principalmente la corrosión y la bioincrustación uno de los principales (Yuce y Muratoglu, 2015). Además, dado que las instalaciones están sumergidas en el agua, toda mantención tiene que hacerse de manera submarina o sacando las turbinas a la superficie, lo cual implica altos costos anuales de mantención y operación, estimados entre un 3,4 a un 5,8% de la inversión inicial (en contraste con el 2,3 a 3,7% que presentan las turbinas eólicas instaladas lejos de la costa) (Uihlein y Magagna, 2016). Se puede ver, por lo tanto, dos aspectos importantes: el primero, la necesidad de mejorar los materiales con los cuales se construyen las aspas y estructuras y, en segundo.
(17) 4. lugar, que las turbinas desarrolladas sean muy fiables, presentando la menor mantención posible. Por otro lado, la inversión inicial continúa siendo muy alta, producto de que usualmente sistemas con alta fiabilidad son muy caros. Se necesita, por lo tanto, llegar a un óptimo económico de todo el ciclo de vida de la turbina. Dado el actual nivel de desarrollo de la tecnología, los costos de mantención y operación son sólo estimaciones, pues no existen instalaciones operando de donde obtener esa información. Al revisar la historia del desarrollo de esta tecnología, se observa que, heredado de las aplicaciones eólicas, se comenzó usando un sistema con caja amplificadora y generador de inducción (SeaFlow, SeaGen, Kinetic Hydropower System (Verdant), H300 (Hammerfest Strøm), entre otros) pero a partir del año 2011, la mayoría de los nuevos desarrollos han migrado a sistemas con una caja de una etapa y generador de imanes permanentes (EnCurrent Turbine, Cycloidal Turbine, Clean Current) o sistemas de acoplamiento directo con generadores de imanes permanentes (Clean Current Tidal Turbine, Open-Centre Turbine (OpenHydro group), Tocardo, OCGen TGU) (Chen et al, 2012). Se puede ver en la industria una tendencia a cambiar a los sistemas más simples, a pesar de tener una inversión inicial levemente mayor, como lo que ocurre con los generadores de imanes permanentes conectados mediante acoplamiento directo en comparación con los de inducción con caja amplificadora. La razón de esto es la complejidad existente para hacer las mantenciones y por lo tanto, los elevados costos de éstas, que encarecen la operación y el costo al considerar todo el ciclo de vida. Un ejemplo interesante es el llevado a cabo por SeaGen, quienes desarrollaron una turbina que va tomada de un poste que sobresale del mar, el cual permite que la turbina suba y baje para así hacer más fácil la mantención. A pesar de que se solucionan los problemas de tener que acceder a una turbina sumergida, los lugares de instalación suelen ser zonas con una alta corriente, lo cual hace que para los barcos sea muy difícil mantenerse estables en torno a la torre para poder efectuar las mantenciones, y reduce la ventana de operación al tiempo que queda entre mareas. Es interesante notar también que las turbinas SeaGen, que constan con caja amplificadora y generador de inducción requieren de una inspección.
(18) 5. cada 6 meses, y una renovación de los principales componentes de la caja cada 5 años, lo cual sería imposible de efectuar si no se pudiese elevar. En resumen, dado los antecedentes existentes en cuanto a la importancia de la mantención de las turbinas, resulta importante investigar en cuanto al desarrollo de generadores de imanes permanentes con acoplamiento directo. En el ámbito eléctrico propiamente tal, en cuanto al diseño del generador mismo, existen muchas variantes y nuevas investigaciones. Las disposiciones geométricas tanto de los imanes como de las bobinas son prácticamente infinitas y originan una gran diversidad de posibles configuraciones. De la experiencia nacida de las turbinas eólicas, se observa que los dos aspectos más relevantes a la hora de elegir una cierta topología son: -. Oscilación del torque: este componente es muy relevante a la hora de elegir las características eléctricas de un generador pues previene de problemas de fatiga torsional además de vibraciones en la estructura, desgaste prematuro de los rodamientos, ruido audible, entre otros.. -. Fiabilidad mecánica: se privilegia un sistema mejor tolerante a fallas.. Además, es necesario compatibilizar estas características con un mínimo costo y una factibilidad técnica, lo cual hace derivar el diseño hacia un generador del tipo radial, de dientes rectos y con los imanes montados en la superficie del rotor (en el cuerpo de la tesis se encuentra justificado en detalle el proceso de selección, en el capítulo 2.2). Uno de los aspectos que diferencian este diseño del actual desarrollo presentado en la academia, es la combinación de polos y bobinas escogida. No se encontraron referencias sobre generadores que usen una combinación similar, a pesar de que ésta presenta ventajas en cuanto a la oscilación del torque, sin comprometer el costo y manteniendo un alto factor de bobinado. Éste es, a juicio del autor, el principal aporte a la ciencia del trabajo realizado. Al revisar la literatura otras configuraciones usadas tanto en generadores eólicos como en generadores para turbinas mareomotrices se encontró que minimizar la oscilación del torque es uno de los objetivos principales. La primera razón de esto es para permitir que el torque de partida de la turbina sea bajo, pero también es relevante para evitar todos los.
(19) 6. problemas de vibraciones que esto puede traer, vistos anteriormente. Uno de los ejemplos donde se ataca esto es en el trabajo de Wu, Ramsden y Crawford (Wu et al, 2000), donde se diseña una máquina de 20 kW y 211 rpm para una turbina eólica. Este diseño optimiza distintos parámetros geométricos de tal manera de minimizar el costo total, de manera similar a esta tesis, pero, a diferencia de este trabajo, tiene como restricción activa la temperatura. Además de esto, se planteó un proceso de optimización el cual minimiza el costo del generador, independiente de la eficiencia. Por lo general, por razones económicas y térmicas, esto no es aplicable en los actuales desarrollos de turbinas eólicas ni en otras aplicaciones. En este caso, dada la excelente refrigeración que se tiene (por el hecho de tener la turbina sumergida en un flujo constante de agua fría) y sumado a los costos casi nulos de la energía inicial, permiten lograr un generador que posee muy alta potencia específica a un costo muy bajo, mínimo para los generadores de este tipo. Este diseño representa en sí una novedad, siendo particular para esta aplicación específica. La mayoría de los generadores utilizados en los desarrollos actuales de turbinas son generadores que no aprovechan las ventajas de refrigeración que provee el estar en un flujo de agua (salvo Open Hydro y Clean Current), empleándose por el contrario generadores tradicionales. La integración de estas tecnologías y el aprovechamiento de estas ventajas pueden permitir el abaratamiento de esta tecnología, para lograr así finalmente la incorporación de la energía mareomotriz en la matriz energética.. 1.4 Estructura de la tesis El cuerpo de la tesis se separa de forma general en tres etapas: Selección de la tecnología a utilizar (capítulo 2) Diseño de la turbina (capítulo 3) Evaluación de la turbina (capítulo 4).
(20) 7. - Selección de la tecnología a utilizar (capítulo 2) Se revisan las distintas alternativas existentes en la literatura y se sigue un proceso de selección a través del cual se opta por un tipo de turbina.. - Diseño de la turbina (capítulo 3) Se diseña la turbina en base al tipo seleccionado previamente. Se divide principalmente en dos aspectos: mecánica y eléctrica. El área mecánica comprende esencialmente el diseño de las aspas en cuanto a su producción de energía y a su resistencia mecánica. En el área eléctrica se diseña el generador de acuerdo a las especificaciones de potencia y torque que se requieren. Se realiza un proceso de optimización del diseño mediante software para minimizar el costo.. - Evaluación de la turbina (capítulo 4) Se presentan los resultados del proceso de diseño y se simula mediante software. En base al diseño se fabricó un prototipo a escala real, se midió experimentalmente y se comparan los resultados obtenidos con los teóricos esperados, para validar el modelo. En éste capítulo se presenta también el proceso de fabricación de la turbina que presenta interés por las técnicas utilizadas que influyen en que el costo de la turbina se mantenga bajo considerando una pequeña escala de producción.. 1.5 Objetivos Los objetivos propuestos a alcanzar por esta tesis son: Diseñar en base a los lineamientos propuestos un generador adecuado para esta aplicación. Para lograr satisfactoriamente esto es necesario partir por el diseño de las palas para así obtener los requerimientos de torque y velocidad angular que pasarán a ser las condiciones de diseño del generador..
(21) 8. Fabricar y probar el prototipo completo, tanto las palas como el generador, para verificar su correcto funcionamiento y poder comparar con los resultados teóricos esperados y con las actuales soluciones que propone tanto la industria como la academia. Establecer una metodología de diseño flexible que pueda ser escalable y que sirva de lineamiento para futuros desarrollos especialmente en el ámbito mareomotriz. Aportar con técnicas constructivas en base a lo observado durante el desarrollo del prototipo.. 1.6 Hipótesis El trabajo, presenta dos hipótesis que se desean satisfacer simultáneamente Es posible obtener un costo equivalente de la energía menor al que tienen los generadores diésel para comunidades alejadas (sin acceso a red eléctrica). Se puede lograr un diseño, validado por el prototipo, que genera 5 kW y que permite extrapolarse a una turbina mareomotriz fuera de costa..
(22) 9. 2 SELECCIÓN DEL TIPO DE TURBINA 2.1 Selección del tipo de turbina Actualmente existen muchas formas de aprovechar la energía en un flujo de agua con poca o sin diferencia de altura, algunas de las cuales son mediante turbinas, aunque existen muchas otras (sistema de vibraciones inducidas por vórtices, sistemas Venturi, correas de aspas, entre otros) que también pueden ser una opción viable e interesante de estudiar, pero que escapan al alcance de esta tesis (Khan et al, 2009; Lago et al, 2010). Las principales turbinas que actualmente se encuentran en desarrollo son las siguientes: - Turbinas de eje horizontal (entubadas y no entubadas) - Turbinas de eje vertical (entubadas y no entubadas) - Turbinas con el eje en el plano (ruedas con palas) La energía hidrocinética de pequeña escala y baja diferencia de altura se encuentra en una etapa aún temprana de desarrollo, por lo que no es posible encontrar literatura que en forma convincente permita concluir cuál es la tecnología más conveniente en cuanto a costos. Sin embargo, los actuales desarrollos de energía mareomotriz se han centrado en las turbinas de eje horizontal, específicamente en las no entubadas. La razón de esto es que teóricamente una turbina de eje horizontal puede lograr mejor factor de potencia que una turbina de eje vertical y que una de eje en el plano (Guney, 2011). Cuando la aplicación es en un canal de relativamente poco ancho es posible instalar una estructura que cruce el canal. En este caso resulta muy conveniente utilizar una turbina del tipo vertical o con eje en el plano, pues se puede dejar fuera del agua (sobre la estructura que cruza el canal) todo el conjunto generador de potencia, lo cual reduce significativamente los costos. Al estar fuera del agua también se hace más fácil usar cajas amplificadoras, pues no existe riesgo de que les entre agua, lo cual reduce los costos de aislación del generador. Si por el contrario, el rio o canal es más ancho, se elevan los costos ya que es necesario hacer una estructura que cruce todo el río, haciendo más viable una opción sumergida..
(23) 10. Figura 2.1 Prototipo final de la turbina mareomotriz En conclusión, privilegiando una mayor flexibilidad y pensando en un desarrollo que pueda aplicarse para extraer energía mareomotriz, se definió que la turbina tiene que ir completamente sumergida. Considerando esto, una turbina horizontal posee mayores ventajas pues su factor de potencia es mejor. Por esto, se escoge la turbina horizontal como el modelo para seguir adelante con el análisis. En la Figura 2.1 se observa una foto del prototipo final, que corresponde a una turbina de este tipo..
(24) 11. 2.2 Selección del tipo de generador 2.2.1 Introducción Durante el siguiente análisis se procederá a elegir el tipo de generador que es más conveniente para esta aplicación, pero para eso es necesario primero ver qué tipo de turbina se utilizará.. 2.2.2 Selección del tipo de sistema El esquema clásico de conversión de potencia en las turbinas hidrocinéticas de eje horizontal tiene las aspas conectadas a una caja amplificadora de tres etapas la cual va típicamente conectada a un generador de inducción. La otra forma de convertir la potencia mecánica es mediante un eje directo al generador, denominado sistema de acoplamiento directo. A continuación, se estudian las características de cada uno de estos sistemas:. Con caja amplificadora - El costo sumado de fabricación de la caja amplificadora y el generador es menor que el sistema de acoplamiento directo, del orden de un 4% menos (Polinder et al, 2006). - Mayor peso de todo el sistema, del orden de un 11% más (Li y Chen, 2008). - La caja amplificadora presenta una fuente de posibles fallas. - Tiene una eficiencia global menor.. Acoplamiento directo - Mejor tolerancia a las fallas, ya que el único componente móvil es el rotor del generador. - Mejor eficiencia energética. - Menores costos de mantención.. Uno de los lineamientos principales del diseño de la turbina es la robustez. Se busca que dure al menos 10 años funcionando con la menor mantención posible por lo que al tener.
(25) 12. la mínima cantidad de componentes posibles se disminuye la probabilidad de falla. Esto hace que bajen los costos de mantención lo cual afecta en el costo de la turbina si se toma en cuenta todo su ciclo de operación. Además, si se está pensando en extrapolar esta tecnología al ámbito mareomotriz, es más importante aún no presentar fallas, pues tanto el diagnóstico como la reparación de estas es mucho más costosa pues la turbina se encuentra sumergida en el mar aguas adentro. Por lo visto anteriormente, se decide seleccionar el acoplamiento directo como la tecnología a utilizar.. 2.2.3 Selección del tipo de generador En cuanto a los generadores más usados en sistemas de acoplamiento directo destacan los síncronos de rotor bobinado y los síncronos de imanes permanentes. Estos se diferencian en la forma como se genera el campo magnético que rota y que induce en el bobinado del estator el correspondiente voltaje. Los rotores bobinados constan de bobinas alimentadas con corriente continua mientras que los de imanes permanentes éstos generan el campo magnético. El síncrono de rotor bobinado en primer lugar usa escobillas, lo que obliga a hacerle mantención. Además posee mayores pérdidas pues tiene que magnetizar con electricidad el rotor y su tamaño y costo es mayor. La única ventaja que posee por sobre el de imanes permanentes es que permite regular la magnitud del campo, pudiendo tenerse control sobre el voltaje generado, pero en este generador en particular eso carece de importancia. Por esta razón el generador síncrono de imanes permanentes es la opción más robusta, además de que tiene mejor eficiencia y tiene una potencia específica más alta.. 2.2.4 Selección de la topología En los generadores síncronos de imanes permanentes existen principalmente tres topologías: la radial, la axial y la transversal..
(26) 13. La radial es la topología más clásica, con los imanes dispuestos de tal forma que el flujo va de forma radial y se compone de dos cilindros coaxiales que giran uno respecto del otro, como se ve en la Figura 2.2 (a). En un generador de tipo axial el flujo magnético se transmite al estator de forma axial, siendo conformado por dos platos coaxiales que giran uno respecto del otro. La Figura 2.2 (b) es un esquema de este sistema. Por último, están los generadores de flujo transversal, que presentan flujo en ambos sentidos, como se ve en la Figura 2.2 (c). Al comparar el rendimiento de los tres tipos de generadores, se observa que no hay consenso en cuanto a cuál es el que presenta mejores características de torque por unidad de masa y de costo por unidad de torque. Según Dubois, el que presenta mejores características es el de flujo transversal (para diámetros menores a 1 m, que es nuestro caso), luego viene el radial y por último el de flujo axial (Dubois, 2004), pero Pippuri, Manninen y Tammi postulan que el con mayor densidad de torque es el de flujo radial (Pippuri et al, 2013).. Figura 2.2 Topologías de generadores síncronos de imanes permanentes. (a) Generador de Flujo radial. (b) Generador de flujo axial (c) Generador de flujo transversal Independientemente de esta disputa, el problema de los generadores de flujo transversal es que su fabricación es compleja ya que requieren una dirección de laminación que es difícil de lograr y el proceso de bobinado y ensamblado de las bobinas requiere mucho.
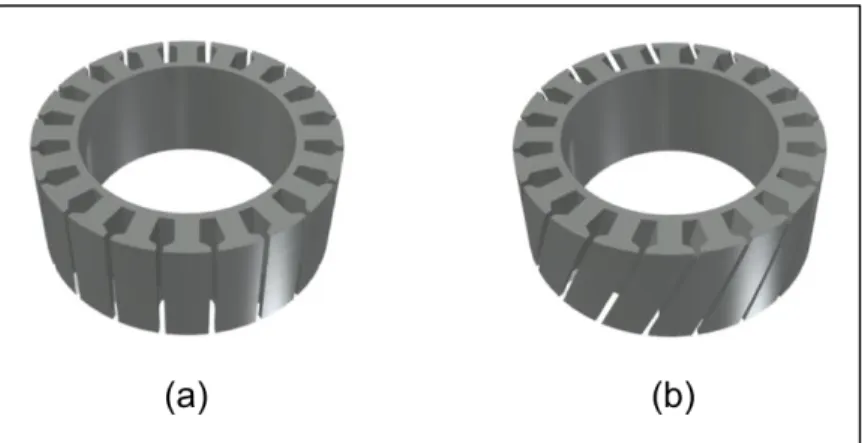
(27) 14. trabajo. Esto hace que los costos de manufactura de dicho generador sean elevados, razón por la cual el generador radial es el que tiene mayor presencia a nivel industrial. Basados en esto, se decidió, por razones de factibilidad de fabricación, diseñar un generador del tipo radial. Además, se cuenta con toda la experiencia de la industria, lo cual permite resolver los posibles problemas de fabricación de manera más rápida.. 2.2.5 Estator con los dientes en diagonal Es usual, en motores y generadores donde se quiere minimizar la oscilación del torque, fabricar los dientes del estator de tal manera que estén en diagonal, como aparece en la Figura 2.3. Según el estudio realizado por Bianchi y Bolognani (2002) donde se estudian diferentes técnicas para reducir la oscilación del torque en motores con los imanes montados en la superficie (como el generador que se diseñará). Hacer que los dientes estén en diagonal disminuye la oscilación del torque, pero implica complicaciones y costos en la fabricación, además de hacer prácticamente imposible el montaje automático de las bobinas, lo cual supone un costo de fabricación pues obliga el montaje manual de éstas. Además, mediante otras técnicas (correcta selección del número de polos y dientes, correcta selección de características geométricas de los imanes y dientes, entre otras), permiten prácticamente eliminar la oscilación del torque sin implicar un costo adicional, como sí ocurre al implementar técnicas como ésta. Por esta razón, se decidió utilizar un estator con los dientes rectos, y utilizar las otras estrategias para minimizar la oscilación del torque, que no tienen un impacto en el costo del generador..
(28) 15. Figura 2.3 Estator con los dientes rectos (a) y en diagonal (b). 2.2.6 Selección de la configuración de los imanes Los imanes pueden situarse de maneras muy variadas dentro de un generador, pero siempre van en el rotor, pues así se evita el uso de escobillas. Algunos poseen los imanes montados en la superficie o pueden ir insertos dentro del rotor. En cuanto a estos últimos, existe una gran variedad de configuraciones posibles, teniendo por lo general ventajas en algunos aspectos por sobre los montados en la superficie. Sin embargo, dada la alta complejidad que tendría evaluar tantas variables geométricas y la mejora no tan considerable, se prefiere optar por imanes montados en la superficie, que permiten parámetros claros de diseño y mayor simpleza al momento de optimizar el costo. Respecto de la ubicación del rotor, existen dos posibles topologías: por dentro o por fuera del estator (Figura 2.4). Cada una de estas configuraciones tiene sus ventajas, expuestas a continuación:.
(29) 16. Figura 2.4 Configuración interior o exterior del rotor Rotor interior - Al estar el rotor por dentro, el estator queda por fuera, presentando una mejor refrigeración que de las bobinas que el de rotor exterior, pues se encuentra en contacto con el agua de forma directa. - Al ser un rotor con los imanes montados en la superficie, existe la posibilidad que se desprenda un imán.. Rotor exterior - Los imanes quedan sometidos a una fuerza centrífuga no existiendo posibilidad de que se separen del rotor, aunque se despeguen. - Al no presentar riesgo de desprendimiento, no es necesario reforzarlos por fuera, lo que reduce a un mínimo espesor el entrehierro, permitiendo un mejor aprovechamiento de los materiales magnéticos y por ende una mayor potencia específica y menor costo. - Menor cantidad de hierro en el estator, menores pérdidas y menores costos. - Mejor refrigeración de los imanes lo cual incide en que sea menos probable que se desmagneticen por efectos de la temperatura.. En el caso con rotor interior, el desprendimiento de un imán genera una falla total del sistema, con muy altos costos de reparación, si es que es posible, por lo que una situación.
(30) 17. así no se pude permitir. Una forma de solucionar esto es restringir mecánicamente los imanes por fuera, pero esto implicaría un aumento del entrehierro, lo cual disminuye la potencia específica del generador. Dado lo visto anteriormente, se optó por un generador de rotor exterior y se implementó en el diseño un ducto central por donde pasa parte del agua que mueve la turbina, y que mantiene el estator a una temperatura adecuada para su funcionamiento. De todas maneras, no es posible descartar para futuras investigaciones un rotor interior que tenga los imanes insertos en el rotor, pero escapa a los alcances de esta tesis.. 2.2.7 Conexión a la fuente de consumo El generador produce corriente alterna de frecuencia variable, dependiendo de la velocidad del agua. Para evitar variaciones de la frecuencia de la red, y poder utilizar este sistema en un mayor rango de velocidades de agua, se propone utilizar un rectificador y luego un inversor. Es posible además instalar algún sistema intermedio de acumulación, como un banco de baterías. Se propone hacer la transmisión en corriente continua desde el generador hasta el lugar de consumo, pues de esta manera se transmite con el mayor voltaje del sistema, disminuyendo así las pérdidas por este concepto. Siendo esto así, se instalaría el rectificador dentro del generador o en su proximidad, y el inversor cerca del lugar de consumo.. 2.2.8 Selección de la cantidad de fases y del tipo de conexión El número de fases a elegir puede ser una, tres o más. Los sistemas monofásicos no son capaces de entregar potencia constante por lo que como la potencia de entrada debiese ser constante, genera un torque pulsante lo cual no es deseable. Un generador trifásico es capaz de entregar potencia constante, así como también un sistema de cinco fases. Al revisar la literatura existe un amplio respaldo en.
(31) 18. configuraciones que rectifican mediante un puente de diodos a los generadores de cinco fases, porque presentan dos principales ventajas: - Un menor rizado del torque. - Para suavizar la corriente requieren de un condensador mucho menor. Si bien en sí parece ser una mejor opción, se verá más adelante que para el tipo de bobinado que se quiere usar es más conveniente un sistema trifásico, ya que las combinaciones geométricas que se pueden lograr tienen un mejor comportamiento en cuanto a la oscilación del torque.. 2.2.9 Selección del tipo de bobinado Se entiende por bobinado concentrado aquel que se encuentra bobinado en torno a un solo diente del estator, y por bobinado distribuido aquel que una espira encierra más de un diente. En la Figura 2.5 se muestran ambos. Como se puede ver a simple vista en la figura, un bobinado distribuido tiene unos extremos de bobina mucho más largos que los de un bobinado concentrado ya que tienen que saltarse dientes. Por esta razón, un bobinado concentrado usa menos cobre, por lo que es más barato y tiene menos pérdidas (ya que los extremos de las bobinas únicamente transmiten la corriente de un lugar a otro y no aportan a generar trabajo).. Figura 2.5 Bobinado distribuido (izquierda) y concentrado (derecha) Fuente: Electrical Machines, Mathematical Fundamentals of Machine Topologies, Dieter Gerling.
(32) 19. Además, se encontró en la literatura que el bobinado concentrado logra una mayor densidad de potencia y además presenta mayor inductancia por fase, lo que ayuda a tener un mejor desempeño ante corto circuitos, protegiendo al generador (Jia et al, 2014). Normalmente se utiliza bobinado distribuido porque con motores de pocos polos suele generar menos armónicos, pero eso se puede corregir modificando la geometría y controlando la saturación, como se verá más adelante. Por todas las razones anteriores, se decidió por lo tanto utilizar un bobinado concentrado.. 2.2.10 Selección de las combinaciones útiles a evaluar Una vez decidido que se utilizará un bobinado concentrado, es necesario determinar la mejor combinación posible de polos y bobinas. Hay dos factores esenciales que determinan la decisión: el torque pulsante y el factor de bobinado. Ambos aspectos se estudian a continuación.. 2.2.10.1 Oscilación del torque Un generador con dientes implica que existen zonas donde la reluctancia es mayor (cuando un imán está entre dos dientes) y otras donde la reluctancia es mínima (cuando un imán se encuentra alineado con un diente). Para efectos prácticos, supongamos un generador de cuatro bobinas y cuatro imanes. Si se deja libre el rotor, éste va a alinear los dientes con los imanes, de tal manera de ubicarse en un punto de mínima reluctancia. Si se hace girar con la mano el rotor, se percibirá que el motor avanza a pasos, de polo en polo, este fenómeno se conoce como torque pulsante. Una vez que se pone en marcha el motor, esta oscilación se mantiene, pero se aminora, generando un rizado notorio en el torque final de salida. El rizado del torque es un elemento no deseado en una máquina pues genera una vibración torsional en toda la estructura, lo que puede inducir una falla por fatiga, además de cargas excesivas en los rodamientos. Cuando un sistema utiliza una caja amplificadora, el efecto directo sobre el sistema no es tan importante (pues al aumentar la velocidad angular se.
(33) 20. aleja de las frecuencias naturales), pero al usar un sistema de acoplamiento directo resulta muy importante que éste se mantenga bajo. Se recomienda que sea menor a un 1,5% del torque promedio (Sopanen et al, 2011). Un ejemplo de la importancia del rizado en estas aplicaciones es el desarrollo llevado adelante por SeaGen, una empresa del Reino Unido que desde 2008 ha desarrollado y puesto en práctica turbinas mareomotrices. El generador que ellos proponen utiliza bobinas con núcleo de aire, para así evitar por completo el torque pulsante. Esta evidencia refleja lo importante que son las vibraciones de esta índole para una turbina mareomotriz, lo cual lleva a desarrollar un generador con núcleo de aire, a pesar de que su desempeño sería superior si utilizara bobinas con núcleo de material magnético (Keysan et al, 2011). Una forma de poder predecir el torque pulsante de una cierta configuración es mediante el factor introducido por primera vez por Z. Q. Zhu en 2000 y corroborado de forma analítica por él mismo en 2009 (Z. Q. Zhu y Howe, 2000; L. Zhu et al, 2009). El parámetro se calcula mediante: 𝐶𝑇 =. 2𝑃𝑄𝑆 𝑁𝐶. ( 2.1 ). donde 𝑃 es el número de polos, 𝑄𝑆 es el número de bobinas y 𝑁𝐶 es el mínimo común múltiplo entre ambos. Entre menor el valor de 𝐶𝑇 menor es el máximo valor que puede alcanzar el torque pulsante (Z. Q. Zhu y Howe, 2000), teniendo por límite inferior 1. La intuición detrás del 𝑁𝐶 tiene directa relación con el mínimo común múltiplo, el cual podemos suponer que si es bajo implica que existen más posiciones del rotor que calzan con el estator, no así un número alto, idealmente igual a la multiplicación entre ambos.. 2.2.10.2 Factor de bobinado Corresponde a la razón entre el flujo magnético enlazado por un conjunto de bobinas comparado con el que hubiese sido enlazado por un bobinado de una capa, de paso completo y cuyo número de ranuras por fase es entero. A modo de ejemplo, un generador con 2 polos y 6 bobinas (trifásico) tiene un factor de bobinado de 1..
(34) 21. El factor de bobinado de los motores trifásicos se encuentra calculado reiteradas veces en la literatura, por lo que se usaron directamente los valores encontrados (Skaar et al, 2006). Se requiere, por lo tanto, que el factor de bobinado sea lo más alto posible, pero ocurre que los factores de bobinado más altos (por ejemplo 1) tienen un alto torque pulsante, por lo que hay que buscar el mayor factor de bobinado dentro de lo que permita la oscilación del torque.. 2.2.10.3 Número de ranuras por polo por fase El número de ranuras por polo por fase (q) es un valor que determina la relación entre polos y bobinas. Un motor con q = 1 tiene una ranura por cada polo por cada fase, por ejemplo un generador de 2 polos y 6 bobinas cumple con esto (trifásico). Para que una máquina eléctrica tenga un bobinado concentrado tiene que tener un q menor o igual a 1/2. Como ya se estudió anteriormente, usar un bobinado concentrado tiene muchas ventajas, por lo que q tiene que ser menor a 1/2. Un motor con un q cercano a 1/3 va a tener 1/3 de ranuras por polo por fase, por lo que, como se va a diseñar un generador trifásico, se tiene que el número de ranuras por polo es en torno a 1. Ahora bien, el mayor factor de bobinado en una máquina de bobinado concentrado se logra con un q = 1/3 (Jia et al, 2014), pero como dicha configuración tiene el mismo número de dientes que de polos, genera un torque pulsante muy alto, inaceptable para esta aplicación. Ocurre que en torno a q = 1/3 se encuentran configuraciones con alto factor de bobinado y con características de torque pulsante no tan malas como lo tiene el con q = 1/3 que son las que serán evaluadas a continuación. Primero que todo, es necesario notar que, por simetría de la máquina, el número de polos tiene que ser par. Para un sistema trifásico es necesario que el número de bobinas sea múltiplo de 3 (para tener un generador equilibrado) y para uno de cinco fases, el número de bobinas tiene que ser múltiplo de 5. Además de estas restricciones existe un efecto de desbalance de las fuerzas, que ocurre cuando el número de bobinas es uno más o uno menos que el número de imanes. Si se.
(35) 22. tiene por ejemplo 8 polos y 9 bobinas, ocurre que por geometría sólo interactúan en una zona del generador, realizando torque únicamente en una de las mitades del rotor, produciendo que no se distribuyan de forma pareja los esfuerzos, obligando a la estructura a ser más robusta, además de generar problemas en la vida de los rodamientos, generar ruido y vibraciones excesivas (Z. Q. Zhu et al, 2007). Es por esto que, a pesar de que estas configuraciones poseen un torque pulsante muy bajo, no se consideran en este caso. En la Figura 2.6 se observa el campo magnético del ejemplo mencionado.. Figura 2.6 Flujo magnético en motor con 8 polos y 9 bobinas En la Tabla 2.1 se muestran distintas configuraciones que presentan un q cercano a 1/3 y que son factibles (están equilibradas) para los sistemas de cinco fases. Se puede ver que los generadores de cinco fases no presentan configuraciones factibles con 𝐶𝑡 = 1, en cambio los trifásicos sí (como se puede ver en la Tabla 2.2), por lo que representan una mejor opción si se quiere mejorar las características de rizado del torque (un 𝐶𝑡 = 1 implica la configuración con mínima oscilación del torque). Es por esta razón que se decidió utilizar un sistema trifásico, presentándose a continuación un análisis de las configuraciones seleccionadas. Se mencionó anteriormente que existen algunos trabajos donde se propone que los generadores de cinco fases presentan mejores características de en cuanto a la oscilación del torque. En esos trabajos se estudiaron generadores con.
(36) 23. bobinado distribuido, los cuales tienen menor potencia específica que los concentrados y por ende presentan un costo más alto. Al evaluarse la oscilación del torque en un generador con bobinado concentrado, la alternativa trifásica resulta en principio mejor. Un estudio más detallado de esto escapa a los alcances de esta tesis, pero sin duda es una alternativa que merece ser estudiada en un futuro desarrollo. Tabla 2.1 Posibles configuraciones para generador de cinco fases Polos. Bobinas. Ct. 8. 10. 2. 10. 15. 5. 12. 15. 3. 16. 20. 4. 18. 20. 2. 20. 25. 5. 28. 30. 2. 30. 35. 5. 36. 40. 4. 38. 40. 2. 40. 45. 5. 42. 45. 3. 48. 50. 2. 50. 55. 5. 56. 60. 4. 58. 60. 2. 60. 65. 5. 68. 70. 2. Por lo tanto, se concluye que el bobinado a utilizar es trifásico. Dado un número de polos (P), se denominó el entero menor o igual al número de polos que sea múltiplo de tres, más.
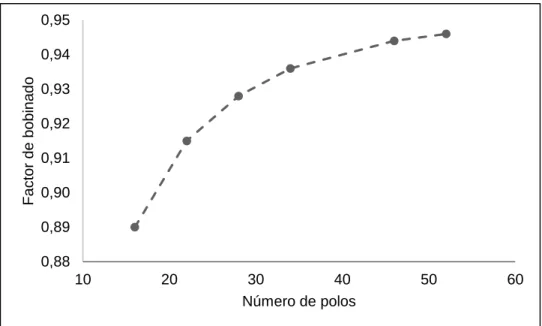
(37) 24. cercano al número de polos. Se consideraron únicamente combinaciones que disten de 3 o más unidades de diferencia hacia arriba con P, vale decir 𝑄𝑆 − 𝑃 > 2. ( 2.2 ). La razón de esto es que se descartaron valores de 𝑄𝑆 = P ± 1 por razones de desbalance en la fuerza y los casos en que 𝑄𝑆 − P = 2 tienen un mal mínimo común múltiplo, pues son múltiplos de dos. Los 𝑄𝑆 menores a 𝑃 en más de una unidad también se descartaron por tener un factor de bobinado muy bajo. Además se recortaron los polos menores a 8, por no ser factibles de construir. Con esto, las posibilidades finales se resumen en la Tabla 2.2. Se observa en la Tabla 2.2 que aquellas combinaciones que tienen mejor comportamiento son aquellas que la diferencia entre el número de polos y el de bobinas es 5 y 7. En ambos casos, el 𝐶𝑇 es1, pero ocurre que las configuraciones con 7 poseen un factor de bobinado menor a la de 5, por lo que se optó por combinaciones de polos y bobinas que tuviesen una diferencia de 5. Esto nos da las opciones que se pueden ver en la Tabla 2.3 con sus respectivos factores de bobinado. Como se puede ver en la Tabla 2.3 y en la Figura 2.7, a medida que aumenta el número de polos, aumenta el factor de bobinado. Esto hace que se enlace mayor flujo por lo que se esperaría observar una mayor potencia específica. No obstante, un mayor número de polos, dada una cierta inductancia fija, aumenta la frecuencia por lo que disminuye la potencia máxima que se le puede extraer al sistema. En el resto de la tesis se evaluarán las últimas tres configuraciones, se modelarán y se optimizará para cada una de éstas, para encontrar el generador de menor costo..
(38) 25. Tabla 2.2 Posibles configuraciones sistema trifásico P. Q. CT. Q. CT. P. Q. CT. Q. CT. 8. 12. 4. 15. 1. 38. 42. 2. 45. 1. 10. 15. 5. 18. 2. 40. 45. 5. 48. 8. 12. 18. 6. 14. 18. 2. 21. 7. 44. 48. 4. 51. 1. 16. 21. 1. 24. 8. 46. 51. 1. 54. 2. 27. 9. 48. 54. 6. 57. 3. 18. 42. 20. 24. 4. 27. 1. 50. 54. 2. 57. 1. 22. 27. 1. 30. 2. 52. 57. 1. 60. 4. 54. 60. 6. 63. 9. 24 26. 30. 2. 33. 1. 56. 60. 4. 63. 7. 28. 33. 1. 36. 4. 58. 63. 1. 66. 2. 30. 36. 6. 60. 66. 6. 69. 3. 32. 36. 4. 39. 1. 62. 66. 2. 69. 1. 34. 39. 1. 42. 2. 64. 69. 1. 72. 8. 66. 72. 6. 75. 3. 36. Tabla 2.3 Configuraciones con Ct = 1 Configuración Polos/Bobinas 16/21. Factor de bobinado 0,890. 22/27. 0,915. 28/33. 0,928. 34/39. 0,936. 46/51. 0,944. 52/57. 0,946.
(39) 26. 0,95. Factor de bobinado. 0,94 0,93 0,92 0,91 0,90 0,89 0,88 10. 20. 30 40 Número de polos. 50. 60. Figura 2.7 Factor de bobinado en relación al número de polos. 2.2.11 Contenido armónico Un elemento que se suele apuntar en contra de las combinaciones mencionadas anteriormente es su contenido armónico. Al estudiar generadores similares, se encontró que los voltajes fase-neutro poseen, en algunos casos, altos contenidos de tercera armónica (producto de la saturación del acero), pero ésta armónica no es vista por la carga pues es de secuencia cero, por lo que la forma de onda del voltaje fase-fase es prácticamente sinusoidal. En la Figura 2.8 se muestra el análisis de Fourier del voltaje fase-neutro del prototipo (simulado), donde se ve que al eliminar la tercera armónica (conectando una carga resistiva en estrella) el voltaje queda prácticamente sin distorsión armónica. Es interesante notar que como los voltajes fase-fase son prácticamente sinusoidales la corriente también va a ser sinusoidal y por lo tanto la potencia de sumar tres sinusoidales va a ser constante, lo que va a contribuir a que no tenga rizado en el torque producto de este efecto..
(40) 27. 1. Contenido armónico. 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0 1. 2. 3. 4. 5. 6 7 Armónica. 8. 9. 10. 11. 12. Figura 2.8 Contenido armónico del voltaje teórico del prototipo fabricado. 2.2.12 Resumen del proceso de selección El esquema de la Figura 2.9 resume el proceso de selección del generador, donde se encuentra resaltado el camino adoptado..
(41) 28. Figura 2.9 Esquema resumen del proceso de selección.
(42) 29. 3 DISEÑO DE LA TURBINA 3.1 Análisis hidronidámico de las aspas 3.1.1 Introducción El comportamiento de las aspas se modeló utilizando la teoría del “momento de elemento de aspa” (blade element momentum, BEM). Mediante esta teoría se pudo obtener la forma óptima del aspa de manera de lograr la mayor potencia posible en el menor diámetro total. Que el diámetro sea lo menor posible es muy importante pues esto permite más posibles lugares de instalación, los cuales tienen que tener una profundidad mayor al diámetro de la turbina.. 3.1.2 BEM BEM es un método que mezcla dos teorías, la del elemento de aspa (blade element) y la del actuador de disco o teoría de la cantidad de movimiento (momentum theory). Mediante el uso de ambas teorías se calcula la fuerza axial y el torque en cada elemento de aspa. Este cálculo se realiza mediante un software desarrollado por L. Chiang llamado Turbem (Chiang, 2014) que compara ambas ecuaciones y ajusta los parámetros de tal manera que se obtenga el mismo valor utilizando cualquiera de las dos teorías. A continuación se describen ambas teorías.. 3.1.2.1 Teoría de la cantidad de movimiento Esta teoría calcula la energía absorbida por un disco de un espesor infinitesimal situado en un flujo. Este disco es permeable y no le entrega velocidad rotacional al flujo. Se define un volumen de control que rodea a la turbina como se ve en la Figura 3.1 y se asume que el fluido exterior no interactúa con la turbina..
(43) 30. Figura 3.1 Volumen de control y velocidades en la teoría de la cantidad de movimiento Se toman cuatro secciones del volumen de control, dos aguas arriba de la turbina (secciones 1 y 2) y dos aguas abajo (secciones 3 y 4). El disco extrae energía del fluido generando una caída de presión inmediatamente después del disco. Las secciones 1 y 4 se asume que tienen presión ambiental por lo que, para satisfacer la ecuación de Bernoulli, es necesario que la velocidad en la sección 4 se vea reducida. Luego, si 𝑉1 y 𝐴1 son la velocidad y el área en la sección 1 y 𝑉4 y 𝐴4 la velocidad y el área de la sección 4, tenemos que la variación momento para un fluido con densidad 𝜌 viene dada por: 𝐹𝐴 = 𝑉1 (𝜌𝐴1 𝑉1 ) − 𝑉2 (𝜌𝐴2 𝑉2 ). ( 3.1 ). Donde 𝐹𝐴 es la fuerza axial. Si el flujo másico se conserva en el volumen de control entonces tenemos que 𝐹𝐴 = 𝑚̇(𝑉1 − 𝑉4 ). ( 3.2 ). Por otro lado, se tiene que cumplir la ecuación de Bernoulli, tanto aguas arriba como aguas abajo de la turbina, lo que se tienen las dos siguientes ecuaciones: 1 1 𝑃1 + 𝜌𝑉12 = 𝑃2 + 𝜌𝑉22 2 2 1 1 𝑃3 + 𝜌𝑉32 = 𝑃4 + 𝜌𝑉42 2 2. ( 3.3 ) ( 3.4 ).
(44) 31. Donde 𝑉2 y 𝑉3 son las velocidades en las secciones 2 y 3 respectivamente, y 𝑃1 , 𝑃2 , 𝑃3 y 𝑃4 son las presiones en las secciones 1, 2, 3 y 4 respectivamente. Asumiendo que en el disco 𝑉2 = 𝑉3 = 𝑉𝑟𝑜𝑡 , que 𝑃1 = 𝑃4 = 𝑃𝑎𝑚𝑏 y que 𝐴2 = 𝐴3 = 𝐴𝑟𝑜𝑡 tenemos que la fuerza axial puede ser escrita en términos de la caída de presión como 1 𝐹𝐴 = 𝐴𝑟𝑜𝑡 𝜌(𝑉12 − 𝑉22 ) 2. ( 3.5 ). Si igualamos las ecuaciones (3.1) y (3.2) obtenemos que 𝑉𝑟𝑜𝑡 =. 𝑉1 + 𝑉4 2. ( 3.6 ). Para desarrollar un modelo que incorpore los efectos rotacionales, las secciones anteriores se dividen en anillos de radio 𝑟 y espesor 𝑑𝑟. Se toma un volumen de control que rota a la misma velocidad que el rotor, Ω. Si la velocidad axial del flujo se mantiene constante, pero la velocidad angular del fluido aumenta en 𝜔 justo después del rotor, la diferencia de presiones justo antes y justo después del rotor viene dada por: 1 𝑃2 − 𝑃3 = 𝜌 (Ω + 𝜔) 𝑟 2 𝜔 2. ( 3.7 ). La fuerza axial producida por cada anillo (𝐹𝐴 ) viene dada por el cambio de presión en la sección por su área, de la siguiente forma: 1 𝑑𝐹𝐴 = (𝜌 (Ω + 𝜔) 𝑟 2 𝜔) 2𝜋𝑟𝑑𝑟 2. ( 3.8 ). Ahora, si analizamos la variación de la cantidad de movimiento angular producido por un anillo, ésta viene dada por 𝑑𝑇 = 𝜌𝑉𝑟𝑜𝑡 2𝜋𝑟𝑑𝑟(𝜔𝑟)𝑟. ( 3.9 ). Donde 𝑇 es el torque generado. Por la Ecuación 3.6 conocemos la velocidad axial del flujo, con lo que lo anterior queda 𝑑𝑇 = 𝜌(𝑉1 + 𝑉4 )𝜋𝜔𝑟 3 𝑑𝑟. ( 3.10 ). De esta forma, vemos que se obtiene una expresión para el torque producido por un anillo de flujo y una expresión para la fuerza axial, pero es necesario conocer el aumento de velocidad angular y la velocidad axial final (es decir ambas componentes de la velocidad del fluido aguas abajo)..
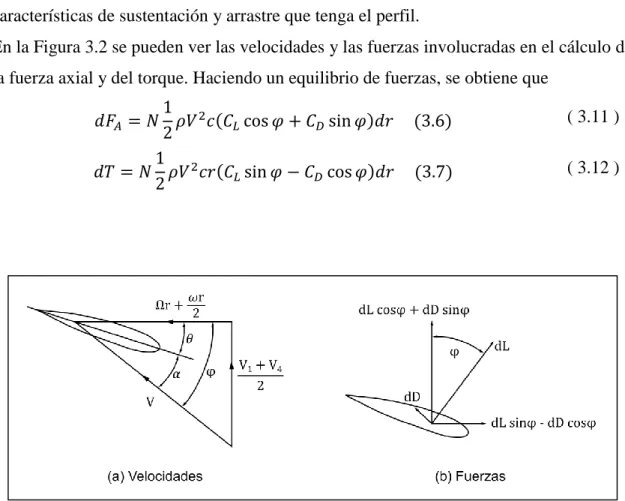
(45) 32. 3.1.2.2 Teoría del elemento de aspa Esta teoría divide el aspa en secciones discretas a lo largo de la misma. Se asume que no existe interacción entre los elementos bidimensionales que suelen corresponder a perfiles alares. En consecuencia, las cargas en las aspas se generan únicamente por las características de sustentación y arrastre que tenga el perfil. En la Figura 3.2 se pueden ver las velocidades y las fuerzas involucradas en el cálculo de la fuerza axial y del torque. Haciendo un equilibrio de fuerzas, se obtiene que 1 𝑑𝐹𝐴 = 𝑁 𝜌𝑉 2 𝑐(𝐶𝐿 cos 𝜑 + 𝐶𝐷 sin 𝜑)𝑑𝑟 2 1 𝑑𝑇 = 𝑁 𝜌𝑉 2 𝑐𝑟(𝐶𝐿 sin 𝜑 − 𝐶𝐷 cos 𝜑)𝑑𝑟 2. (3.6). ( 3.11 ). (3.7). ( 3.12 ). Figura 3.2 Elemento de aspa Donde 𝑁 es el número de aspas. De la Figura 3.2 se puede ver que 𝑉1 + 𝑉4 𝜑 = tan−1 ( ) 2Ω𝑟 + 𝜔𝑟 Y 𝑉 puede calcularse mediante el teorema de Pitágoras,. ( 3.13 ).
Figure



+7



Outline
Documento similar