Sistema de planeación de trayectorias de mínimo tiempo para robots bajo el criterio de fault tolerance
103
0
0
Texto completo
(2) INDICE. CAPÍTULO t. INTRODUCCIÓN 1. 1 Antecedentes 1.2 Objetivos 1.3 Planteamiento del problema de planeación de trayectorias 1.4 Planeación de trayectorias tradicional 1.4.1 Espacio cartesiano y Espacio de articulación 1.4.2 Esquema de la planeación de trayectorias tradicional 1.4.3 Trayectorias de articulación interpoladas 1.4.3.1 Segmentos lineales con suavización parabólica 1.4.3.2 Trayectorias SLSP 1.4.3.3 Polinómios cúbicos 1.4.3.4 Trayectorias con splines cúbicos 1.4.3.5 Trayectoria interpoladas con segmentos de diferentes polinomios 1.4.4 Planaeación de movimiento en espacio cartesiano 1.5 Problemas en la planeación de trayectorias 1.6 Modelo de planeación de trayectorias propuesto. l 2 3 3 5 6 8 to 11 12 13 15 21 22. CAPÍTULO 2. CARACTERIZACIÓN DE TAREAS 2.1 Justificación de la caracterización de tareas 2.2 Metodología de la caracterización de tareas 2.3 Definición del criterio de mínimo tiempo. 28 28 43. CAPÍTULO 3. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS 3 .1 3 .2 3.3 3.4 3.5. Introducción Modelo general de robots de coeficientes de influencia Simulaciones del modelo general Cinemática Inversa ( modelo propuesto) Simulación de cinemática inversa. i. 45 47 54 55 57.
(3) CAPÍTULO 4. MÍNIMO TIEMPO 4.1 4.2 4.3 4.4 4.5. Concepto de mínimo tiempo Pararnetrización de las ecuaciones dinámicas Definición de la región admisible Algoritmo de Shin & Mckay Fault Tolerance y Mínimo Tiempo. 60 60 64. 64 64. CAPÍTULO 5. IMPLEMENTACIÓN COMPUTACIONAL 69. 5.1 Estructura del modelo general 5.2 Simulación. 72. CAPÍTULO 6. CONCLUSIONES Y RECOMENDACIONES 86 87. 6.1 Conclusiones 6.2 Recomendaciones. APÉNDICE A. SIMULACION MODELO GENERAL DE ROBOTS 89 APÉNDICE B. SIMULACIÓN CINEMÁTICA INVERSA. 96. REFERENCIAS BIBLIOGRÁFICAS. 100. 11.
(4) CAPITULO 1. 1 '. ' '. "'". ------. ~. --- '. "'. ·- " '. "-. \. /. \. INTRODUCOÓN. '\. \. \. --. ". \.
(5) 1. INTRODUCCION. 1.1 ANTECEDENTES. A partir de la década de los setentas los robots han destacado como una forma de automatización rentable y bastante versátil, resultando de ello un crecimiento exponencial en la demanda de ésta tecnología, sin embargo no ha sucedido lo mismo con la oferta. Partiendo de ésta necesidad los institutos de educación superior de todo el mundo se han abocado a la tarea de desarrollar dicha tecnología y preparar recursos humanos. En el ITESM-CEM se ha adoptado una estrategia que permitirá la vanguardia en el desarrollo de tecnología en el campo de la robótica, a través de la investigación y solución de problemas actuales que se presentan en los diversos sistemas que constituyen un robot, ver figura l. l.. Sistema Mecatrinico Parle control Control de tareas. Parle Operativa. Pre actuador. A e t. u a. Sistema ' .o mee ame. d. Algoritmos de control. Sensor. 11. r Hardware. Software. Figura 1.1 .Elementos de un robot visto como un sistema mecatrónico.. Esta tesis contribuirá con el estudio de un caso específico de la parte de control de tareas de un robot, mediante un sistema de planeación de trayectorias que contemple la tolerancia de fallas para un caso de trayectorias de mínimo tiempo. 1.
(6) l. INTRODUCCION. 1.2 OBJETIVOS. a). Establecer una metodología para caracterizar tareas de robot y extraer criterios para la elección de un método de planeación de trayectorias. Implementar un modelo computacional de un método de generación de trayectorias para mínimo tiempo. Integrar las restricciones dinámicas del robot al método de planeación de trayectorias, como parte de los criterios de Fault Tolerance.. b) c). 1.3 PLANTEAMIENTO DEL PROBLEMA.. En particular los robots industriales tienen dos características que nos permiten distinguirlos de otras máquinas: • Flexibilidad: Potencialidad estructural de ejecutar diferentes tareas y/o realizar la misma tarea en diversas formas. • Adaptabilidad al enlomo: Es la posibilidad de un robot de alcanzar su objetivo por sí mismo, a pesar de las perturbaciones imprevistas del entorno a lo largo de la ejecución de la tarea.. Para cumplirlas, el robot debe satisfacer un conjunto de requerimientos específicos, según el tipo de tarea y el movimiento deseado de su órgano terminal. De esta manera el módulo de control de tareas, ver figura l, convierte esta información en una curva espacial trazada por el órgano terminal, formada por un conjunto de puntos P; con características geométricas, cinemáticas y dinámicas. Para que el robot pase por dichos puntos es necesario que los actuadores muevan al manipulador en función de los parámetros de control siguientes:. 0. 02. 1 ,. <..> 1. ,. , ... ,. <..> 2. ex, , a 2 ,. e"Coordenadas de articulación que definen la posición de cada eslabón.. , . .. ,. ... ,. <.6,Timera derivada de las coordenadas de articulación de posición que definen la velocidad angular.. ª". Segunda derivada de las coordenadas de articulación de posición que definen la aceleración angular.. 2.
(7) l. INTRODUCCION. donde n, es el número de grados de libertad del manipulador.. Una trayectoria está definida por tres parámetros: a) Geométricos - Ecuación vectorial de la ruta espacial de desplazamiento del órgano terminal - Puntos de trabajo, de enlace y/o paso b) Onemáticu - Velocidad lineal y angular del órgano terminal en cada punto o intervalo de la ruta - Exactitud de posicionamiento del órgano terminal. c) Dinámicu - Aceleración del órgano terminal a lo largo de la ruta - Fuerzas y torques en el órgano terminal a lo largo de la ruta Entonces, el problema de la planeación de trayectorias se puede enunciar de la siguiente manera:. Obtener la ecuación vectorial que representa la ruta espacial a seguir por el órgano tenninal del robot, y la historia temporal de los parámetros de su control para ejecutar eficientemente una tarea. 1.4 PLANEACIÓN DE TRAYECTORIAS TRADICIONAL. 1.4.1 &pacio cartesiano y espacio de aniculación La posición de los eslabones de un manipulador de n grados de libertad puede ser especificada con un conjunto de n varibles de articulación. Este conjunto de variables, comunmente reprresentado con un vector de articulación de nxl, Según [Craig88], el espacio de todo el conjunto de vectores de articulación se le designa &pacio de aniculación (EA). El Espacio Cartesiano (EC) es aquel definido por el marco coordenado ortogonal a lo largo del cual se puede medir la posición y la orientación del órgano terminal.. 3.
(8) l. INTRODUCCION. La relación entre ambos espacios se define a través de la cinemática: a) Directa: Para determinar la posición y lka orientación del órgano terminal en función de las n variables de articulación. b) Inve~a: Determinar las coordenadas de control o varibles de articulación en función de la posición y la orientación del órgano terminal.. Para la planeación de trayectorias se puede adoptar EA o bien EC, sin embargo en la literatura se ha demostrado que la forma mas eficiente de realizarla, es utilizando ambos. En la figura 1.4.1, se muestra la forma directa e indirecta de realizar la planeación de trayectorias, en ésta última se indica la definición de puntos de trabajo al órgano terminal del robot en EC y posteriuormente se transforman mediante la cinemática inversa al EA, donde se aproximará una curva que cumpla con las restricciones impuestas por el usuario en ladefinición de los puntos de trabajo. En la tabla 1.4. l· se resumen las características mas importantes de la planeación de trayectorias en EC y EA.. ESPACIO CARTESIANO. ESPACIO DE ARTICULACIÓN. •. ... movimiento = f (0i, 0i, 0i ): i = #GOL. movimiento = f (xj, ~j. xj ) ; j =# Dimensiones espaciales. Al1oritmo: t = to; mientras t <tf ; hacer t = t + i1t, evaluar h(t); donde h(t) = trayectoria de la mano. Al1oritmo: t= to; mientras t < tf ; hacer t = t + i1t; evaluar h(t) ; Evaluar q[h(t)) ; función en EA). Ventaju: Planeación directa en coordenadas de control Planeación en tiempo real Rutas simples. Veataju: Especifícac:ión de la posición y orientación Facilidad del ususario para determinar la posición de la mano. Desventajas: Peligro de colisión No separa orientación de posición Dificultad para determinar la posición de la mano en EC. Desventajas: Utiliza la cinemátuica Inversa para cada punto consigna generado No se tiene encuenta la demanda sobre los actuadores. Tabla 1.4.1 Espacio Canesiano y Espacio de Aniculación 4.
(9) I. INTRODUCCION. 1.4.2 &quema Genenl de Planeación de Trayectorias El esquema general de planeación de trayectorias planteado en la literatura, [Taylor79]. [Luh84], [Lactombe9l], [Shin&Mckay] y otros, realiza una clara división en tres partes, como se muestra en la figura l .4.2, Planeación de Tareas (Task Planning) , Planeación de trayectorias (Path Planning) , Control de la Ruta ( Path Tracking ).. Planeación de Tareas (Task Planning) En ambientes industriales la programación de robots para la ejecución de tareas se realiza de manera Gestual o Textual y consiste en la especificación de la ruta de trabajo ya sea por: i) Definición de un conjunto de puntos de paso ii) Especificación de la ruta de trabajo Posteriormente, para el caso ( i ) se definirá la forma de la ruta entre los puntos de paso Según [Latombe 91 ], ambas formas de definición de la tarea son de bajo nivel a su dependencia de los conocimientos y experiencia del usuario, teniendo presente la posibilidad de una definición errónea de la tarea. En [ Castillo 93] se propone el uso de una base de datos para auxiliar al usuario a la especificación completa de la tarea y evadir posibles errores de definición y además contenga la función de comunicarse a la siguiente fase planeación de trayectorias.. ----. _,,,.,_. ......,.... ·- --<. Slng•lorih._. º-""-. ~--~. PI.MEAOONDE TAA'IECTOllloU [l'odl PI,....... '""- CD1W111•:. CONTROL DE. wf•cW.cl •e11lereci6n, ed.. (l'od, Troddn!I). P-6n.. NOVINIElrl'O. Figura 1.4.2 &quema Tradicional de Planeación de trayectorias 5.
(10) 1. INTRODUCCION. Planeación de Trayectorias ( Path Plannin& ) A continuación , una vez especificada la ruta y sus restricciones, en la fase planeación de trayectorias se seleccionará el tipo de espacio se generan los parámetros de control, es decir, las historia de posiciones, velocidades, aceleraciones y torques para seguir la ruta definida. En la sección 1.4.1 se mencionó la existencia de espacio cartesiano y del espacio de articulación para la planeación del movimiento y en la figura 1,4.1 , se muestra que puede realizarse en forma directa e indirecta para ambos espacios.. Para determinar parámetros de control óptimos, en los esquemas de control actuales de planeación se incluye la dinámica del manipulador, evasión de obstáculos y puntos singulares, permitiendo así el uso adecuado de las capacidaes del robot.. Control de Movimiento (Path Tracking) Esta etapa consiste en la ejecución del movimiento generado en los niveles anteriores, mediante el envio de las órdenes de control a los actuadores .. 1.4.3 Trayectorias de aniculación lntetp0ladas Existen varias razon«;s para implementar el uso de movimiento interpolado, tanto en espacio cartesiano como de articulación: • Prevención de colisión con obstáculos presentes en volumende trabajo del manipulador • Ruta para la ejecución de la tarea demasiado compleja para describirse analíticamente • Trayectoria suave a lo largo de ciertos puntos de paso especificados. Un ejemplo, puede verse en la figura 1.4.3.1, donde el manipulador debe comenzar desde un punto s y llegar a una posición final & sin colisionar, en espacio cartesiano. Para realizarlo, la trayectoria total se divide en tres segmentos A, B, C, por la definición de 2 puntos de paso pl y p2. La definición de un movimiento entre punto de paso impone 4 restricciones para la trayectoria: dos restricciones de posición y dos restricciones de velocidad y aceleración.Entonces, entre cada punto se puede interpolar una función de grado suficinte que cumpla con el conjunto de restricciones impuestas por los puntos de paso. 6.
(11) 1. INTRÓDUCCION. [Fu 86] señala algunas desventajas, del movimiento interpolado: • Polinomios de alto grado son difíciles de resolver y modificar. • La presición numérica para el calculo decrece a medida que el grado del polinomio se incrementa • Los polinomios de alto grado tienen la tendencia de oscilar entre los puntos de paso.. s PI. [. '. '. ,. ,. •. ••. '. •. .. .. ,,. "' ~. '. '. , ,. - --. :]. ........ ''. rr t • r. , , 1. 1 1. -. 1 1. ··--.····. ,..,, .' . . . ,, , '·" ........ '. -··. . ...... ..... .... '''. '. .. '. -•J. ,,,. ..... ' ' '. ,, ' " ' " '. .... ' 1'. B. e FIGURA 1.4.3. l. [Paul 72] encontró algunas consideraciones de interés en la planificación de una trayectoria interpolada de un robot: 1. Cuando se toma un objeto, el movimiento de la mano debe dirigirse hacía afuera del objeto para evitar golpear la superficie del soporte del objeto. 2. Para tener un movimiento de partida admisible debe especificarse un punto de despegue a lo largo del vector normal a la superficie desde la posición normal. mas aún, si se especifica el tiempo requerido para alcanzar la posición de despegue, entonces se puede controlar la velocidad 3. El mismo conjunto de requisitos de despegue para el movimiento del brazo es también válido cuando el órgano terminal del robot se acerca a la posición final, es decir debe definirse un movimiento en dirección normal a la superficie final.. 7.
(12) l. INTRODUCCION. De las consideraciones anteriores, se tienen cuatro posiciones para cada movimiento del brazo: inicial, despegue, asentamiento y final.Ver figura l.4.3.2 A.nteulK10n,. ,,,,>. Fin&!. 9(11). 9(,,) l(lo). ,,. ,,. 'º. 't. Tianpo. FIGURA l.4.3.2 Condiciones de posición para una trayectoria interpolada. 1.4.3.1 SEGMEN1US LINEALES CON SUAVIZACIÓN PARABÓLICA (SISP) La selección mas sencilla de una ruta para conectar dos puntos es una linea recta. esta elección da como resultado una velocidad contínua a lo largo de la ruta excepto en la transición entre segmentos, la velocidad será discontinua. Un camino para evadir las discontinuidades en velocidad y aceleración es aproximar una función parabólica en los extremos de los segmentos rectos(ver figura 1.4.3.3). En la tabla 1.4.3. l se muestra un resumen de las ecuaciones y parámetros necesarios para el cálculo y control de esta curva.. O.. '·. t.. Figura ~ .4.3.3 Trayectoria SLSP 8. T-t,,. T.
(13) 1. INTRODUCCION .. Suponiendo que ambas regiones parabólicas tienen la misma duración y que la ruta es simétrica con respecto a un punto central th . Para la construcción dwe la curva se requiere ti, , t, - tb y t, 9 (t) es la función parabólica en Os t s tb La velocidad al final de la región parabólica debe ser igual que al inicio de la región lineal 9(tb ) = eb, entonces:. ••. donde 9 es la aceleración de la sección parabólica en tb . Se puede expresar. ... ~. como:. ~-~. B... =·--Combinando las ecuaciones anteriores, con T=2 th l ... 9o = lt +-B,~ 2. de la cual debe ser definida 9 y t = tb. Usualmente los valores para 9 son definidos y ti, es calculado resolviendo la ecuación anterior.. ¡~. =-t - J(i ,: - 4 8( B. - B). 2. 2 (}. Esta ecuación impone una frontera mínima para el valor de 9 : ... 8>. 4( Br- 8,). '. r. La desigualdad anterior no permite al segmento parabólico extenderse hasta ~ , pues se conectaría directamente al siguiente segmento parabólico si la parte lineal entre ellos.. 9.
(14) 1. INTRODUCCION. 1.4.3.2 Trayectorias Sl.SP para rutas con varios puntos de paso.. En los resultados de la sección precedente solo se c:msideró el caso una trayectoria de dos puntos. Ahora se considerará el caso de varios puntos de paso. (ver figura l.4.3.4). Según el caso anterior, se debe encontrar la duración tdik dando un valor para 9 . En la tabla l.4.3 .2 ecuaciones describen el segmento entre los puntos de paso:. 1.4.3.3 Polinomios Cúbicos El caso mas simple consiste en encontrar una curva entre dos puntos {<.>º, <.> 1}, donde el movimiento debe realizarse en un tiempo T. Si la herramienta comienza en el punto <.>º con velocidad Vº y debe alcanzar c.> 1 con velocidad V', se imponene cuatro restricciones que satisfacen el polinomio de la forma: 8(t)-= a,>.,.... a1t. -. a2t=. -. a/~. O~ t <.T. donde:. eu(O). =. eo a,. (:)º. B(O) = BT) =. úJ{T) = C:>'. .. CLJ(O). = V°. CLJ(T). = v•. . =O . B(T) = 0 8(0). Los coeficientes del polinomio cúbico son :. ª·> =Bi a,= O 3 a: = -. ( 81 - 9,). r·. 10.
(15) 1. INTRODUCCION. e. i. e.. i.. 1 1. ;1. ~-· "--- J. Figura l .4.3 .4 Segementos rectos con suavización parabólica a través de puntos de paso. 1.4.3.4 Trayectorias de Splines Cúbicos No Racionales La interpolación de una función dada mediante un conjunto de polinomios cúbicos preservando la continuidad en la primera y segunda derivada en los puntos de interpolación, se conoce como funciones de splines cúbicos. En estye tipo de polinomios la primera derivada representa la continuidad en velocidad y la segunda en aceleración. Las principales ventajas que ofrecen los splines cúbicos son: • Permite continuidad en velocidad y aceleración • Reducen la cantidad de cálculos necesarios y la posibilidad de inestabilidades numéricas. Sea Qit) la función polinomial cúbica a tramos para la articulación j entre los puntos de paso H; y H¡+ 1 definidos en el intervalo de tiempo [t¡, t¡. 1 ] • El problema es ajustar Qj¡(t) para i =l, 2, 3, .... , n-1, puntos de tal manera que el dezplazamiento, velocidad y aceleración requeridos se satisfagan y sean contínuos en todo el intervalo de tiempo [t1 ,ln ]. Como el spline Qj¡(t) es cúbico, su segunda derivada respecto al tiempo Qj¡(t) debe ser función lineal de t.. 11.
(16) 1 I¡ +. QJI (I). -. (I -. I; ,'i. 11). ,'I. •. = - 1- ,¿,.(ti) + -u,- \!¡;(•;+ 1 U¡. l. . . ·• n - 1. Í =. ). j. .. INTRODUCCION. = 1.... , .V. donde u¡ = t¡ - t¡. 1 es el tiempo gastado en recorrer el segmento i. Integrando Q;¡(t) dos veces y satisfaciendo las condiciones de frontera Q;¡(t¡) = q;¡ y Q;¡(t¡. 1) = q;. i+t conduce a las siguientes funciones de interpolación: Q¡,(I) = g6·,,(1,) (11+. 1. +. t)·'. -. (}1,(~,.. , I (1 -. "• i+1 + [ </¡. ... U¡. +. ['ii.j_ -. -. =. U;{!¡¡(t, •. 1. - -- -. )J. 6. ~(!1,(I¡)] (f.. 11¡. i. 1 )·'. 6u1. 6. •••. (/ -. -. ~. •. 1). •. +. /). l •... , n - 1. j = 1, ... , N. Así, para i = 1, 2, 3, ... ,n-1. Qit) se determina si se conocen Q;;(t¡) y Q;;(t¡. 1) • esto conduce a un sistema de n - 2 ecuaciones lineales cobn incógnitas Qit¡) para i = 1, 2, 3, .... , n - 1 y datos U¡ para i = 1, 2, 3, ...., n - 1 AQ. =. b. IIJ. )11,. +211,+...!. 11,. "z _'!J. 4-. o "•. 11,. o. 2'11, +11,). 11,. 11,. o·. o. o. 2(..,. o. o o. o. o. + ...,. "• o. 2(11, +11._,,. o. o. " · - .!. ~'"·-1+11... .1:). 12. o o. 11: ... . ..... -11: ... ,+i...-.1:+...... "· - 1. "• - 1. Ju. ...
(17) 1. b=. INTRODUCCION. r 6 ( q,- - V;,,llo-l u. _ 1. ( \1- + -1-) q¡.o - J + -6q¡ ,o-J + 11:-1 - 2-a¡.) - 6. - 6( -I- + - 1 )(q¡. u.-1. "•-1. u~ ··J. -a,.. u¡.11.-, + 11;_, -. 3. "•- J. u.-J. ) + ~ +6q.-1 - - -11.-,a¡.. u.-1. 1111-•"•-J. la estructura de la matriz a hace fácil su solución para Q que se sustituye en la ecuación( .. *) para obtener la solución resultante Qit). La solución de Qj¡(t) se da en términos del intervalo de tiempo U¡ y de los valores dados para los desplazamientos, velocidades y aceleraciones en los puntos .de paso. La matriz A es no singular para todo intervalo de tiempo · U¡, por lo que la trayectoria de la articulación de spline cúbico tiene solución imica.. 1.4.3.5 Trayectorias Interpoladas con se1mentos de diferentes polinomios En función de las consideraciones presentadas por [Paul72], en la tabla 1.4.3.3 se presentan las restricciones impuestas a la trayectoria en los puntos inicial, despegue, asentamiento y final (ver·figura 1.4.3.2). Para evitar el uso de un polinomio de alto grado que cumpla con las restricciones ya expuestas, se divide la trayectoria completa en algunos segmentos que puedan utilizar diferentes polinomios de interpolación para cada uno de ellos. Existen diversos métodos los mas comunes según [Fu86] y [Komell87], son los siguientes:. • Trayectoria 4-3-4.Se tienen tres segmentos polinomiales: el primero es de cuarto grado que especifica la trayectoria desde la posición inicial hasta la de despegue. El segundo segmento es un polinomio de tercer grado desde laposición de despegue hasta la posición de asentamiento. El último segmento es un polinomio de cuarto grado y especifica la trayetoria desde el despegue hasta la posición final. En la tabla l.4.3.4 se muestran las ecuaciones de los poliromios para esta trayectoria.. 13.
(18) I. INTRODUCCION. Restricciones para la planeación de trayectorias interpoladas con se1mentos Posición inicial. Posicion inicial(dato) Velocidad inicial (dato) Aceleración inicial (dato) Posición, velocidad y aceleración de despegue y continuidad con el segmento previo. Posición intermedia Posicición, velocidad y aceleración de asentamiento Continuidad en velocidad y aceleración con el siguiente segmento Posición final. Posicion final( dato) Velocidad final (dato) Aceleración final( dato). Tabla 1.4.3 .3. • Trayectoria 3-5-3 Se utiliza para el primer y tercer segmentos polinomios de tercer grado, especificando las trayectorias de inicio al despegue y del asentamiento al final respectivamente. El segundo segmento es un polinomio de quinto grado. Las ecuaciones de los polinomis para esta trayectoria se muestran en la tabla 1.4.3.5.. 14.
(19) 1. INTRODUCCIÓN. 1.4.4 Planeación de movimiento en espacio cartesiano En un sistema robótico programable, el movimiento deseado se puede especificar como secuencia de puntos nudos cartesianos, cada uno de los cuales se puede describir en términos de transformaciones homogéneas que relacionan el sistema de coordenadas de la mano del manipulador con el sistema de coordenadas del espacio de trabajo. Las correspondientes coordenadas de articulación en estos puntos nudos cartesianos se pueden calcular a partir de la rutina de solución del problema cinemático inverso y se puede utilizar un polinomio cuadrático para suavizar con fines de control los puntos nudos de dos articulaciones consecutivas en coordenadas de articulación. Así se controla la mano del manipulador para moverse a lo largo de una línea recta conectada mediante estos puntos nudos.. Esta técnica tiene la ventaja de permite controlar la mano del manipulador para seguir a objetos móviles. Aunque las posiciones finales se describen mediante sus transformados, no especifican cómo se mueve la mano del manipulador de un punto transfonnado a otro. Paul (1979) utilizó una traslación con línea recta y dos rotaciones para conseguir el movimiento entre dos puntos cartesianos consecutivos. La primera rotación es respecto de un vector unitario k y sirve para alinear la herramienta o efecto final a lo largo del ángulo de aproximación deseado y la segunda rotación alinea la rotación de la herramienta respecto al eje de la misma.. En general, las posiciones finales del manipulador se pueden expresar en la ecuación matricial fundamental siguiente: Of6 6Therr = 0Cbase (t) basep obl. (-1). donde. 0T6 = Matriz de transformación homogénea 4 x 4 que describe la posición y orientación de la mano del manipulador con respecto al sistema de coordenadas de la base. 6Therr = Matriz de transfonnación homogénea 4 x 4 que describe la posición y orientación de la posición y orientación de la herramienta con respecto al sistema de coordenadas de la mano. Describe el punto final de la herramienta cuyo movimiento se desea controlar. 0Cbase(t) = Matriz de transformación homogénea 4 x 4 de la función del tiempo que describe el sistema de coordenadas de trabajo del objeto con respecto al sistema de coordenadas de la base. 15.
(20) 1. INTRODUCCIÓN. basepobj = Matriz de transformación homogénea 4 x 4 que describe la posición de orientación deseada de la pinza del objeto para el efector final con respecto al sistema de coordenadas de trabajo.. Si se combina 6Therr con 0T6 para formar la matriz del brazo, entonces 6Therr es una matriz identidad 4 x 4 y se puede omitir. Si el sistema de coordenadas de trabajo es el mismo que el sistema de coordenadas de la base del manipulador, entonces 0Cbase (t) es una matriz identidad 4 x 4 en todo instante de tiempo.. En la ecuación (-1) se puede ver que las matrices del lado de la izquierda describen la posición y orientación del órgano terminal del manipulador, mientras que las matrices del lado de la derecha describen la posición y orientación de la característica del objeto donde nos gustaría que la herramienta del manipulador lo cogiese. Así podemos resolver para 0T6 que describe la configuración del manipulador para agarrar al objeto de una forma correcta y deseada: (-2). Si 0T6 se fuera a evaluar a una velocidad suficientemente alta y al convertirse en los correspondientes ángulos de articulación, el manipulador se podría controlar para seguir la trayectoria.. Utilizando la ecuación (-1 ), una secuencia de N posiciones finales que definen una tarea se pueden expresar como. 0 Te. =. Of5 (6Therrh [OCbase(t)]1 (bnePob~ 1 (6Therrh [OCbase(t)]2 (ba18Pot,¡) 2. =. (-3). Simplificando la notación de superindices y subíndices en la ecuación anterior tenemos: T6 herrT1. =C 1 (t)P1. Tehe"T2 = C2 (t)P2. (-4). 16.
(21) 1. INTRODUCCIÓN. Desde las posiciones definidas por Ci(t)Pi podemos obtener la distancia entre puntos consecutivos, y si se nos dan las velocidades lineales y angulares, podemos obtener el tiempo necesitado Ti para ir de la población i a la posición i + 1. Como las herramientas y los sitemas de coordenadas móviles se especifican en posiciones con respecto al sistema de coordenadas de la base, el moverse de una población a la siguiente se hace mejor especificando ambas posiciones y herramientas con respecto a la posición de destino. Esto tiene la ventaja de que la herramienta parece que está en reposo desde el sistema de coordenada móvil.. Con el fin de hacer esto, es necesario redefinir la posición presente y las herramientas con respecto al sistema de coordenadas siguiente. Esto se puede hacer facilmente redefiniendo el punto transformado P¡ utilizando una notación de dos subíndices como Pij que indica la posición Pi expresada con respecto al sistema de coordenadas j-ésimo. Así, si se necesita controlar el manipulador desde la posición 1 hasta la posición 2, entonces en la posición 1, expresándola con respecto a su propio sistema de coordenadas, tenemos:. (-5). y expresándola con respecto al sistema de coordenadas en la posición 2 se tiene: (-o). De estas ecuaciones podemos obtener ahora P12: (-7). El objetivo de la ecuación anterior es encontrar P12 dado P11. Así el movimiento entre dos puntos consecutivos cualesquiera i e i + 1 se puede dar como:. para. T6. =C i+1 (t)P¡,¡ +1 (herrf i+Ü -1. (-8). T6. =C i+1 (t)P¡+1 ¡ +1 (herr"f¡+1)·1. (-9). donde Pi,i+ 1 y Pi+ 1, i+ 1 representan puntos transformados tal como hemos expresado anteriormente. Paul [1979] utilizó una forma simple para controlar la mano del manipulador para moverse de un punto transformado a otro. El esquema utiliza una traslación y una rotación respecto de un eje fijo en el espacio acoplado con una segunda rotación respecto del eje de la herramienta para producir un movimiento en velocidad lineal y angular 17.
(22) 1. INTRODUCCIÓN. controlado de la mano del manipulador. La primera rotación sirve para alinear la herramienta en la dirección de aproximación requeridad y la segunda rotación permite alinear el vector de orientación de la herramienta respecto a su eje.. El movimiento desde la posición i hasta la posición i + 1 se puede expresar en ténninos de una transformación de "impulsión", D (l) , que es una función de un tiempo normalizado 1, como: (-10). donde: A.= t,,.E[0,1}. t =tiempo real desde el comienzo del movimiento. T = tiempo total para el recorrido de este segmento.. En la posición i, el tiempo real es cero, 1es cero, D (O) es una matriz de identidad 4 x 4 y: P1 +1, i+1 = P i,i +1 O (1). (-11). lo cual da 0(1) = (P¡, i+1) •1 P ¡ +1, ¡ +1. (-12). e i+ 1 en sus respectivas matrices de transfonnación. Expresando las pos1c1ones homogéneas tenemos. Pi,i+1 = A =. ( 13). nA SA 8A PA O O. O. 1. y. Pu + 1. =. B. = ne. se •e Pe O O O 1. ( 14). Utilizando la ecuación (-27) para invertir Pi, i+ I y multiplicar por Pi+ I ,i+ I nA · ne 0(1). =. DA. Se. DA· 89. sA · ne. SA. Se. ªA. ne. BA . Se. aA · ae. o. o. o. 18. sA · ae. DA· (Pe- PA) SA · (Pe- PA) Ba ·. (Pe- PA) 1. (-15).
(23) 1. INTRODUCCIÓN. donde el punto indica el producto escalar de dos vectores.. Si la función impulsión consiste en un movimiento traslacional y dos movimientos rotacionales, entonces ambos serán directanúente proporcionales a l. Si 1 varía linealmente con el tiempo, entonces el movimiento resultante representado por D(I) corresponderá a un velocidad lineal y dos velocidades angulares constantes.. El movmuento traslacional se puede representar mediante una matriz de transformación homogénea L(I) y el movimiento será a lo largo de la línea recta que une a Pi y Pi+ J. El primer movimiento rotacional se puede representar mediante una matriz de transformación homogénea RA(I) y sirve para rotar el vector de aproximación de Pi hasta el vector de aproximación en Pi+ 1. El segundo movimiento rotacional representado por RB(l) sirve para rotar el vector de orientación de Pi+ 1 respecto del eje de la herramienta. Así la función de impulsión se puede representar como:. D(l) = L(l) RA(l) Rs(l). (-16). donde L(l). Re(l). =. 1 O O lx 1 O o ly 1 O O lz. C(l$) S(l$). -S(l$) C().q,). o. o. o o. o o. 1. 1. (-19). donde V(l6) = Versine (l6) = 1 - cos(l6) RC(l6) = COS(A.6) S(l6) = sen(l0) C(l$) = COS(A.$) S(A.$) = sen().q,). (-20). y I e [O, l]. La matriz de rotación RA(I) indica una rotación de ángulo Q respecto del vector de orientación de Pi que se gira de un ángulo y respecto del vector de aproximación. RB(I) representa una rotación de f respecto del vector de aproximación de la herramienta P¡+ 1.. 19.
(24) 1. IN1RODUCCIÓN. PLANEACION DE TRAYECTORIAS. Espacio. INDIRECTO. Cartesiano. cu,. INDIRECTO. Espacio de Articulación. ~. w. ). -. Rectas Segmentos de recta y transición parabólica Curvas definidas 2grado. n. I. D. i. I DIRECTO I. z eu. -~ 11u 2. Polinomios. 4-~ 3-5-3 Segmertos de recta con sucMZacion S. splines ~onenciales Cosenoidales. LJ 81BLIOTE(ljl. DIRECTO Figura 1.4.1.1. I.
(25) 1. INTRODUCCION. 1.5 PROBLEMAS EN LA PLANEACIÓN DE TRAYECTORIAS. De la descripción dada en la sección anterior del proceso de planeación tradicional de trayectorias para robots, se identifican varias causas que impiden su realización eficiente, estas tienen relación con: Dinámica de manipuladores l) Los métodos dinámicos tener mayor sencillez para que su implementación computacional sea eficiente y permitan el control real del robot. 2) Debe de proporcionar una descripción completa del robot. Planeación de tareas 1) No existe una relación definida entre el tipo de tareas realizables por los robots y las diferentes clases de rutas a seguir por el órgano terminal. 2) El uso de rutas para la planeación en espacio cartesiano involucra bastante tiempo de cálculo. 3) La definición de la tarea depende exclusivamente de la experiencia del usuario.. Cinemática Inversa 1) No existe un método general y eficiente para resover la cinemática inversa de robots 2) Las ecuaciones cinemáticas son altamente no lineales. 3) Las soluciones numéricas son ineficientes y algunas veces no convergen 4) Las soluciones analíticas no están definidas para todos los manipuladores. Control 1) Debe evitarse el control Bang-bang , propiciado por ciertos tipos de rutas, las que demandan de los actuadores respuesta instantánea.. 21.
(26) 1. INTRODUCCION. 1.6 MODEW DE PLANEACIÓN DE TRAYECTORIAS PROPUESTO. Las características de flexibilidad y adaptabilidad al entorno de los sistemas robóticos no son satisfechas por la planeación de trayectorias actual, pues ésta se reduce a la solución de casos particulares. Para ello se ha planteado la necesidad de un sistema general de planeación de trayectorias en el que apartir de un conjunto de criterios preestablecidos se interpreten las especificaciones cualitativas y cuantitativas de una tarea en los parámetros de descripción de una trayectoria. La robustez y eficiencia del sistema residirá en la capacidad de responder a las perturbaciones en el seguimiento de una ruta espacial de trabajo, tal como: • Presencia de obstáculos · • Puntos de singularidad • Fallas internas, etc El conjunto de criterios utilizados para prevenir y/o resolver situaciones con la presencia de perturbaciones se le denomina Tolerancia de Fallas. En la figura 3 se muestra el modelo general de planeación de trayectorias descrito que permitirá conocer la trayectoria óptima. Cada método representa un problema completo para resolverse independientemente y es por eso que se pretende desarrollar como tesis para una de las trayectorias del criterio de mínimo tiempo.:. FUNCIONAMIENTO El proceso de planeación de trayectorias de acuerdo con el modelo propuesto comenzará con la definición por el usuario del tipo de tarea a realizar por el robot y ciertos paraámetros de ella que realmente son demandas y requerimientos particulares. en la siguiente etapa, en función de la información especificada el sistema elegirá el criterio o conjunto de criterios que pueden cumplir con las características definidas de la tarea por el ususrio. dichos criterios a su vez, tienen asociados ciertos métodos o tipos de rutas que son compatibles con los criterios. entonces se evaluarán las alternativas seleccionadas. los resultados serán sometidos a un proceso de depuración, etapa de Fault tolerance, para detectar: • • • •. Inclusión de singularidades o el paso cerca de ellas en la trayectoria resultado Velocidaes, aceleraciones y torques incongruentes con las capacidaes del robot Colisión con obstáculos evasión de la presición exigida. 22.
(27) 1. INTRODUCCION. Para realizar esto, la etapa de Fault tolerance manejará un conjunto de desiciones que le permitirán modificar mínimamente la trayectoria o sus condiciones, sin violar el criterio de la alternativa tratada y las demandas y requerimientos de la tarea. Finalmente se obtendrá la secuencia de parametros de control para el manipulador óptima.. TAREAS. J,, DEMANDAS Y iu:QUDUMI!KTO!. J/ CRITDUO 1. '"'-'. J,. "I/. .... CRITERIO 2. .J. .. CRITERIO n. ....L. ll!TODO 1. M!TODO 2. 1. 1. ~ F~ULT TOL!liNCE. .... n. ~ RestricionH din'1túcas. E,,- Singulaidade1 ". J,. METODO. Elpacio de trabe.jo. TRAYECTORIA OPTIMA. Figura 1.6.1 . Modelo del problema de planeación de trayectorias.. 23.
(28) -. •. -IN. 1. ...-. -. .... -. "..... -. 1. ..-. j'. -IN. -IN. 1. •. - 1"'. 1. ..... -. ......... N. 1 ..!. 1. .... ..... ,.. ....."i'. 11. N. 1. e. ...... 11. e. X j' e. .:::. 1. QS 1. QS. 1 f:f,'. -... -. N. c:zs. :. .... .......... :. qS. e. "..,. ~. .-. --..::--;::::.11. 1. -. .!:. í e :;-. .cJ. 1. ......... -. 11. 11. ~. ~. 00. o. -. ~. • (ti. ~. . c:.6'. -. 1. -~·. ..... ©. ~. ~ 11. .... 11. ..... ..-. 1. -... .... ~ 1 ~. ~. cJS. 11. • (t)-. ~. -IN 1. .!:. 1. e. :;-. 11. ..! 1. e. <:Ci'. 00 00. a. 1. QS'. ~. ~. :. (ti. ~. QS" -IN 1 1. 11. 1. Q). V). 1. it;. 1. ~. <:)'. crf. Q). Q5. -z. u. .,.. .... ·~. ~. ~. :. --;:::---. 1. ~. E-. zo ~ 00 z =-< o u. e. ~. Q. .. !:.. 1. 1. '--. 1. Q). N. -"'. ~ :.i.l (J'J. QS. :. -. -1 QS". -. ·24. =.
(29) POLINOMIOS PARA UNA TRAYECTORIA l - 5 - l. +. ª'º = ºº. ".... N. ci'. a, 1 =. + ..... ..... -= --. ci'. ~+ cd 11. ....e. ..... t,. eM t,. fil. ª12 = (ª;t¡). .... cÜ. ªu = (s,. ..e. v, = ~~(~ t. =. ~ 11. 1. a,. li1(1) = --i·= t I. -. 6«>1 61·0 -2- - - - 2ao tI I. t. e,§'¡. + .,. cd.. +. ~· + ..... .... e,§'¡+ ........ 11 ... ..... ....e. e=. -- ~·. t,. l:IAI. t,. V2. = ~~(~ /12( ll (~. +. ....e. e= l:IAI t,. Gol. fil. = (v,12). éli2. = (ª~i). 3i1. 1 -_ ( 10<>. 2 - 6v 1t 2 - 4v 212 - -3a -li 2. 1. =. (. 01li 6cl2 - J1·1l2 - 31·zlz - -2-. ªr'·JJ. - 2v1 + 2 ,.. =. - M. 61• - ·-- + - 1 - 2a ,~. ,.. f. 8,,o = 82. "....,, ~. éli1. élis --. (2. 3i =. =8. el. +. ......... o. 8,, 1 = (Jcl. - 2v1 t, + a~t;). el. J+..... --11. .... J ..... .e. Tabla 1.4.l.5. + -ª2'~) 2. - - D1lz2) éli4 -- ( -15cl 2 + 8v 112 + 71• 212 + -3011! 2. .e". fil. élio. o. "'. N. ªo'l) - Volt - -2-. 2vo - ª0'1 2. ....+ ..... ........ (vol,). o. a,.2. = (-3ó,. a,.3 = (c5,. -. + 3v1 r. -. V¡I,. 25. a,,:). ª1':) 2. +--. ªz'i) + -2-.
(30) POLINOMIOS PARA UNA TRAYECTORIA 4 - 3 - 4 +. ..,.... .., ~. -. +. ~. +. ......... !+. e~. cll " 11. ..... ~. r.lJ. = (vol1). ª12. = (ªº,¡) 2. a13 =". u,. ". ~. el. ª11. o. -- -. E. = ºº. ,......,. ....... cll-. ....e. ª10 o. a 14 =(.s,. ..e:. -. Vo/ 1 -. Ootf. -2- -. ) (1. (1. '• 12'5 1. a1 = -. ,,. 2. 12\•0 -. -. '•. Su0. -. -. 6C1 1. ,,. o. ~. -~· -. ...+ + ... ¡,. ,......,. ...... o. ......... ~· \U. +. 11. ,,,-...,.. .!::,, -. .e:". (ª•'i) -. Ri2. =. 8n1. = (v1t.). 2. "'. 2. _ 6J 2. ª2 -. 6v 1. -·-· - - -- -. 'i. 20,12. 1!. +. ..,_. o. .., J. J+. ..+_ -J J+ ,,. 11. o ........ u,. - ...... ,;:::-- J e. ...c:. donde " = f/g y. ,. 2,.. 311. 11. ,,. g= - +--+2+ -. f. =. 2J, (4 + ~~-lz + 2,., , + 311) ,,. -. v.,t 1 ( 6. Tablal.4.3.4. 1 31.) + 6, - -- + 4,. - +-. 1,. 1,. l2. ~,_._ lz. V¡1 1. (3 + ~·) + 2li.,, 12 ,. -. Ool 110. (s + , + 2, + s, ) + -. 3. ..!_ l2. ___.!._ '•. _!. 21.. Q. I. t I 1 •. '•.
(31) CAPITUL02. ----~. .. ..... '. ···--·-.... ~ \ .. ""' ' '. '\. '\. '\. \. "\. \. \. \. \. \. \ \. \. '. \. CARACTERIZACIÓN DE TAREAS.
(32) 2.. CARACTERIZACIÓN DE TAREAS. 2.1 JUSTIFICACIÓN DE LA CARACTERIZACIÓN DE TAREAS. Cada tarea que el robot sea capaz de realizar, ya sea soldadura por arco, por puntos, pintura por aspersión, carga y descarga de máquinas, etc., tienen un conjunto de requerimientos inherente, tal como: tolerancias geométricas y de posición, rugosidad, velocidad de procesamiento, tipo de movimiento. Sin embargo un sistema de planeación de trayectorias difícilmente podrá usar esta información para generar la ruta espacial de desplazamiento del órgano terminal. Entonces, es necesaria una caracterización de tareas que establezca criterios de selección para interpretar y traducir los requerimientos de la tarea en los parámetros necesarios en la planeación y el control del robot. Como ejemplo se pueden tener los siguientes criterios de selección:. • Mínimo tiempo para trasladar el órgano terminal de un punto de trabajo a otro. • Mínima energía consumida por los motores que actúan al robot. • Máxima suavidad de la curva espacial que representa la ruta a seguir por el órgano terminal; esto es, ausencia de discontinuidades e indefiniciones en la curva y sus derivadas.. Los parámetros de planeación y control resultantes de la aplicación de los criterios arriba mencionados, representarán las características de la trayectoria óptima para la tarea especificada y que satisfaceran los requerimientos y demandas identificados en la caracterización de tareas; principal objetivo de la planeación de trayectorias.. 2.2 METODOLOGÍA DE LA CARACTERIZACIÓN DE TAREAS. En la figura 2.1 se muestra la estrategia concebida para abordar esta etapa, se divide en tres fases, tareas de manufactura, trayectorias e integración; de las cuáles las dos primeras son independientes y en general el esquema presenta como principal característica la íntima relación con el estudio de las rutas para definir los parámetros que las relacionan.. El objetivo del estudio de las tareas de manufactura fue identificar los requerimientos y demandas para formar grupos de parámetros y para las rutas aquellos parámetros necesarios de generación y control de propiedades de la curva.. 28.
(33) CARACTERIZACION -DE TAREAS. PROCESOS DE. t TRAYECTORIAS. MANUFACTURA. Descripción. Descripción literal. Tipos Precisión Aplicación. Características de proceso Tipos Secuencia tarea y mov. Tolerancias Velocidad Peso herramientas Carga útil Tipo de movimiento. Análisis Descrip. Matem6tica Parámetros: Formación de curw Control de propiedades. Anállsls de la tarea Micromovimientos Tolerancias Velocidad ' Peso Tipo de herramienta otros ~-----Forma c i 6 n de grupos por requerí mi ento"5. I. Figura 2.1. 29. Integración Comparación Parámetros comunes Criterios de seleccion.
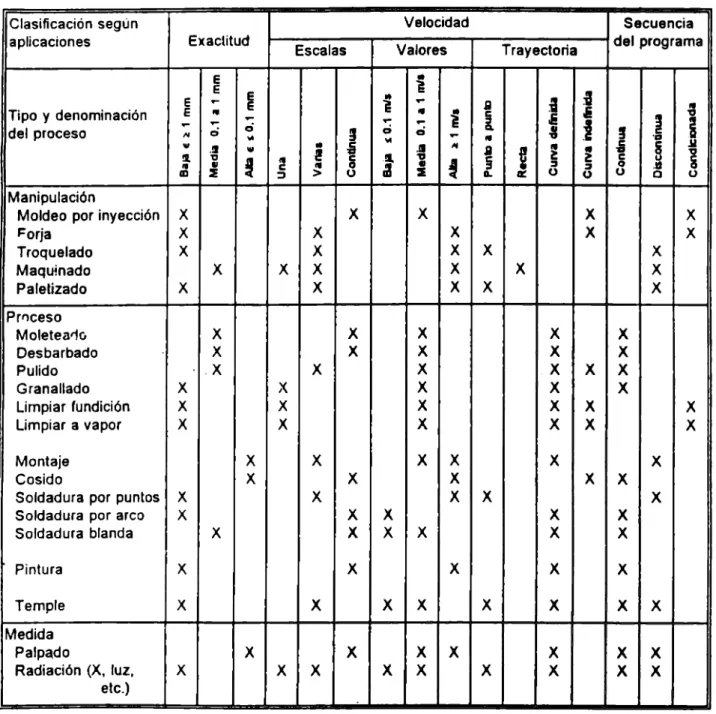
(34) 2.. CARACTERl7.ACIÓN DE TAREAS. Por último, en la etapa de integración se busca correlacionar las tareas con los tipos especificos de rutas que respeten las características inherentes del proceso, a fin de definir los criterios. El estudió de las dos primeras fases comprende 2 niveles: • Reconocimiento • Análisis y para la última etapa de integración la información es tratada utilizando la herramienta de QFD ( Quality Function Deployment ).. FASE I PROCF.SOS DE MANUFACI1JRA Según [PROMAlll 93) las aplicaciones de los robots en la industria mas usuales, se muestran en la figura 2.2, y para ellas se realiza una compilación de característacas y requerimientos generales, tal como: exactitud, velocidad, tipo de movimiento y otros en la tabla 2.1. De manera análoga, en las tablas 2,2, 2.3, 2.4, 2.5 y 2.6 se sintetizan las características de las anatomías para robots más populares actualmente construidas; enfatizando en las aplcaciones debiodas a las restricciones técnicas particulares: espacio de trabajo, robustez, tipo de articulaciones, naturaleza y tipo de actuadores y otros. Una descripción de mayor detalle acerca de los parámetros de control y requerimientos para algunas tareas se resumen en las tablas 2,7 y 2.8, según [PROMAHI 93], [FERRATE 86], (GROOVER 86], [VILLANUEVA 83], [DOYLE 88] y [IlMENEZ 82]. Las tareas relacionadas con operaciones de manufactura muestran tolerancias mas estrechas y usualmente movimientos comnplejos para su ejecución.. En cambio, el grupo de tareas relacionado con el transporte y la manipulación de materiales (Pick and Place Tasks) permite movimientos menos restrigidos y complejos, excepto cuando en la región de trabajo del robot estan presentes varios obstáculos estáticos o dinámicos.. FASE 2 TRA YECI'ORIAS. El estudio de las rutas se realizó en el capítulo anterior en la sección (1.4), en la cual se trató con la descripción matemática y los parámetros necesarios para la formación y control de la curva. [Nanji 88] y [Mutbjaba 85] trataron de correlacionar los tipos de anatomías de los. 30.
(35) 2.. CARACTERIZACIÓN DE TAREAS. robots con ciertas rutas definidas en EC y EA experimentalmente, realizando la medición de algunos parámetros; torque, energía consumida, tiempo transcurido en el seguimiento de la ruta. Sin embargo, no se obtuvo una relación concreta. - Piezas inmóviles - Operaciones de transporte - Piezas en transportador Transferencia (asir y situar) [ - Reconocimiento de de Material formas - Paletización - Paletización y operaciones - Empaque individual [ - Embalaje relacionadas. Manipulación. Carga y descarga de máquinas. APLICACIONES DE LOS ROBOTS INDUSTRIALES. - Carga (aUmentación). - Forjadoras - Cortadoras [ - Troqueladoras. - Descarga. - Piezas inyectadas - Vidrio soplado [ - Piezas extruidas. - Carga I Descarga. -Tomos - Fresadoras - Taladros [ - Centros de maquinado - Carrusel de herramienta. Soldadura. - Por puntos - De arco [ - Continua. Acabado superficial. - Pintura con spray [ - Metalizado. Maquinado. [ -. Procesamiento Taladrado Desbastado y desbarbado Pulido Corte (láser. chorro de agua o arena, etc.). l. Coincide~cia [ - Montajes árboVagujero de piezas - Apilamiento. Montaje Unión de piezas. Inspección. f. Medición. Tornillo I tuerca - Pasadores y seguros - Soldadura fina (estano, cobre, ultrasonido, etc.) - Encolado (pegado) - Cosido. [ • Visual - Táctil Comparación - Otros sentidos. Figura 2.2 Aplicaciones de los robots industriales. 32.
(36) 2.. Velocidad. Clasificación según aplicaciones. Exactitud. Valores. Escalas. E E E ... E .. E ... ...,.. o... o .. .1 .."' !l. ".,. ". ID. Manipulación Moldeo por inyección r=orja Troquelado Maquinado Paletizado Pr'lceso Moletear1c, Desbarbado Pulido Granallado Limpiar fundición Limpiar a vapor Montaje Cosido Soldadura por puntos Soldadura por arco Soldadura blanda. s. ll .¡ & o. •. 2 :,. .. >. I!. X. X X. X X. X X. X X. X. X. X. X X. X X. X X. X. X X. X. X. Tabla 2.1 Requerimientos generales de las tareas. 33. 1. J. .j. 1. a::. o. o. !::,. o. X. X. X. X X. !::,. !. g. 1 "g .Y .1 g. 'G. o. X. X. X. X X. X X. X. X X X X X. X X. X. X X. X. X. X X X. X X. X. X. X. X. X. X. X X. X X. X. X. X. u. X X X X X X X X. X X X. ,i. X. X. X. X. 1. .&. X. X. X X. §. CL. X X X X X X. X. X. t. s. ... 1. X. X X. X X X. X. .3. "s•. X X. X X. X. l.. X. X. Temple. 11. X. X. X. ...o o... i si .. .ll ... ... X. X. Trayectoria. • ...~.. ~. X X. Pintura. Medida Palpado Radiación (X, luz, etc.). !E. Secuencia del programa. •. E. Tipo y denominación del proceso. CARACl'ERIZA.CIÓN DE TAREAS. X.
(37) 2. CARACl'ERIZA.CIÓN DE TAREAS. Anatomía Cartesiana. - Tiene sólo pares cinemáticos de traslación. - Opera dentro de un envolvente rectangular de trabajo. - Ocupa mucho espacio. - Generalmente son instalados en vigas o pórticos. - Tiene grandes capacidades de carga (de 80 a 150 kg). - Generalmente son muy pesados (de 2000 a 12000 kg). - Su costo es más alto que el de robots de otras anatomías. - Pueden llegar a tener gran exactitud ( menor a 0.1 mm). - Se utilizan en metrología, soldadura por puntos y arco, en corte con gas, láser y plasma. - No es apropiado para operaciones de carga de máquinas, pintura, mecanizado, pulido o granallado. - La transmisión de movimiento es por mecanismos de pi"ón-cremallera, cadenas, etc.. Tabla 2.2 Características generales de la anatomía cartesiana.. Anatomía Polar. - Tiene 2 pares de revolución en sus articulaciones inferiores y uno de traslación. - Ocupa menor espacio que los de anatomía cartesiana. - Tiene grandes capacidades de carga (de 6 a 120 kg). - Son menos pesados que los de anatomía cartesiana (de 1000 a 2500 kg). - Tienen gran a_lcance horizontal pero verticalmente están limitados. - Son utilizados ampliamente en soldadura, alimentación de máquinas herramientas y mecanizado. - Su volumen de trabajo se asemeja a una semiesfera hueca. - Tiene una exactitud de media a baja (0.1 ~ e ~ 1 mm ). - Su costo es menor al de los robots de anatomfa cartesiana. - Solo carga un actuador, el que proporciona el movimiento de traslación~. Tabla 2.3. Características de la anatomía polar.. 34.
(38) 2.. CARACTERIZACIÓN DE TAREAS. Anatomía de Brazo Articulado - Tienen pares cinemáticos de revolución en todas sus articulaciones. - Ocupan menor espacio los robots con este tipo de anatomía que con cualquier otra. - Tienen rangos de exactitud de alta a baja (1 mm :s; e :s; 0.1 mm). - Tienen capacidades de carga variadas (de 3 a 100 kg). - Pueden fijarse al techo, pared y al piso. - Tienen mayor alcance vertical que otras anatomías. - Son utilizados para operaciones de soldadura, alimentación de máquinas, corte (plasma, gas, láser y agua), ensamble, mecanizado, paletización. - No son apropiados para la metrología. - La transmisión de movimiento es complicada, generalmente se hace mediante reductores de velocidad armónicos; epicicloidales, de engranes rectos. - Su peso varía entre 50 y 2200 kg. - Su volumen de trabajo es irregular, pero puede accesar puritos más cercanos a su estructlJia mecánica.. Tabla 2.4 Características generales de la anatomía de brazo articulado.. Anatomía Cilíndrica. - Tiene 2 pares cinemáticos de traslación y 1 de rotación. - El volumen de trabajo se aproxima a un cilindro hueco. - Su capacidad de carga es relativamente baja (de 5 a 25 kg). - Tiene gran alcance horizontal pero verticalmente están muy limitados. - Tienen una exactitud en el movimiento de baja a media (O. 1 :s; e :s; 1 mm). - Se utilizan en soldadura por arco, desbarbado, carga 1e máquinas y manipulación ligen1. - No son recomendados para tareas de exactitud alta: metrología, ensamble, etc. - La transmisión de movimiento se realiza generalmente por cremallen1-pillón y reductores de velccí'1ad de engranes rectos.. Tabla 2.5 Características generales de la anatomía cilíndrica. 35.
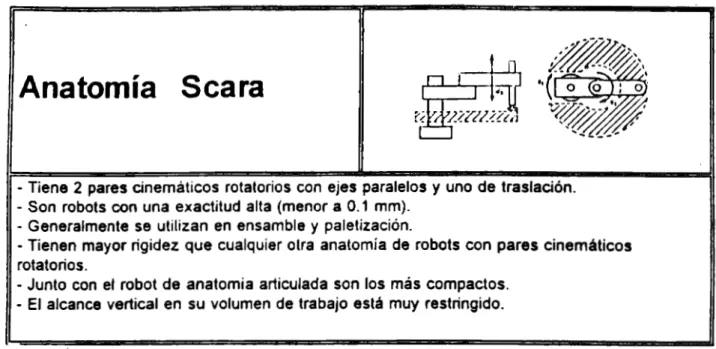
(39) 2.. CARACTEf<l7.ACIÓN DE TAREAS. Anatomía Scara. - Tiene 2 pares cinemáticos rotatorios con ejes paralelos y uno de traslación. - Son robots con una exactitud alta (menor a 0.1 mm). - Generalmente se utilizan en ensamble y paletización. - Tienen mayor rigidez que cualquier otra anatomía de robots con pares cinemáticos rotatorios. - Junto con el robot de anatomía articulada son los más compactos. - El alcance vertical en su volumen de trabajo está muy restringido.. Tabla 2.6 Características generales de la anatomía Scara. FASE 3 INTEGRACIÓN A través del uso de QFD se reatizó la correlación de información obtenida en las etapas anteriores, como puede observarse en las figuras 2.3 y 2.4, para definir los criterios que cumplan y traduzcan adecuadamente los requerimientos de las tareas señaladas en las primeras secciones de este capítulo.. La relación mas importante entre el tipo de curvas estudiadas con las tareas, se le ha asignado el nombre de tipos, que corresponde a una relación funcional de la forma de definir la ruta con la tarea (ver figura 2.5). Los tipos obtenidos son 3:. • TIPO 1) El órgano terminal del robot debe seguir una ruta definida en EC y tan solo se especifican puntos de partida y finál. • TIPOll) Se especifican varios puntos de paso en EC por los que el órgano terminal debe moverse. • TIPO lll) Solo se definen los puntos en EC de partida y final, el movimiento del órgano terminal es libre. 36.
(40) 2.. ... TAREAS SUBTIPOS. E]. !!. Libn. :.;. :··. :•: :,:. \. ::: '.•'.. !!! =::. ::: ;;· ,:,. :¡. o. -o::. e(. :>. rn. :,. CARACTERIZACIÓN DE TAREAS. ... ,.''. 5. Coatlnuo. TIPOI. l.Continuo. Rata Dermida. 2.Pmato. Punto. TIPOII Ruta par p1111to1 .. puo. ..., w ..... J! ~= U). 3. Continuo. U). 'o. ~. ~. rn. ... ). lf. o. ~. w. -o::o. ~. 4.Punto a Punto. Figura 2.5 Definiciones obtenidas de la caracterización de tareas para la elección de criterios. Apartir de estos tres tipos generales se forman cinco Subtipos, correspondientes a la relación entre los tipos y la forma de control o movimiento a lo largo de la ruta. Los cinco subtipos se enuncian a continuación: • SUBTIPO 1) Al manipulador se le especifica una ruta del TIPO I Y debe seguirla con un movimiento contínuo hasta el punto final.. • SUBTIPO 2) Al manipulador se le especifica una ruta del TIPO I y debe seguirla punto a punto, es decir haciendo un paro total cada cierta distancia a lo largo de la ruta.. • SUBTIPO 3) Al manipulador se le especifica una ruta del TIPO II y debe seguirla en forma contínua previo ajuste de una curva por los puntos de paso.. • SUBTIPO 4) Al manipulador se le especifica una ruta del TIPO II y .debe seguirla punto a punto, previo ajuste de una curva entre los puntos de paso.. 37.
(41) 2,. CARACTERIZACIÓN DE TAREAS. • SUBTIPO 5) Al manipulador se le especifica una ruta del TIPO lll y debe seguirla en forma contínua.. En la Figura 2.3 se muestra la relación encontrada entre los subtipos anteriormente definidos y las tareas de carácter industrial estudiadas en la sección anterior de este capítulo. En ésta puede observarse que la mayoría de las tareas de procesamiento o que pueden dar un valor agregado a los productos se realizan en forma continua y la ruta es especificada o definida a través de puntos de paso, pero nunca se deja en forma incierta ( TIPO 111 ).. Otra relación importante aparece en la Figura 2.4, donde se observa la correspondencia entre los subtipos definidos, las rutas ( rectas, polinomios.cónicas, etc. ), las tareas y el espacio de planeación ( cartesiano / articulación ). Apartir de esto, a las rutas menionadas en las columnas de la Figura 2.4, se les asignó el nombre de Omes. En la figura 2.5 se agrupan las definiciones operativas obtenidas ( tipos, subtipos, clases, criterios)en el contexto de la tarea, para conformar el árbol de desiciones del modelo propuesto en la figura 1.6.1 del capítulo 1, para la seleccción de criterios adecuados para la planeación de trayectorias.. 38.
(42) TAREA. Tolerancia. VEL.. Tipo de Movimiento. Whta.. Otros. TALADRADO. ITIO, ITI 1 IT12 $ .= 0.8mm $ = 25µm. 0.02$ Avance ~.l mm/rev. • Discontinuo • Sin curvas definidas • Con/sin obstáculos. ~. 5 Kg. • Eje de la herramienta perpendicular a superficie de trabajo • Se requiere presición en posicionamiento • Avanee de hta. recto • Prod.máx. = f (distancia/ agjs.. DESBARBADO. O.lmm $ S 1 mm. 0.01$ S 1 mis. • Continuo • Curvas regulares/irreg. • Obstáculos. ~. 5 Kg. ~6vimientos complejos, poca presición, contacto hta-pz.a. • Distancia Hta.-pza. constante. SOLDADURA POR PUNTOS. ~. V~ 1 m/s. •Discontinuo • Curvas irregulares. • Con/Sin obstáculos • Paro total en posición deímida. ± lmm. ~. ··'°. PULIDO. CORTE (lúer, arena, agua ). 0.lmm S S 1 mm. ± 0.1 mm. O.OOSmm/r. $ 1 m/s. • Continuo • Curvas regulares/irreg. • Obstáculos. • • • •. S14 Kg 116Kg. ~. ~. Continuo Curvas regulares/irreg. Sin obstáculos Posición de hta. cte.. Tabla 2.6. Estudio de las párametros de tareas usuales para robots industriales. 3 Kg. • Posición y orientación complejas • Espesor metal S l mm • tiempo = f ( tipo de material, corriente, fz.a. boquilla) • Producción máx.= f( t min. transporte) •Contacto pza-hta. • Fz.as. de reacción • Vel. de trabajo: 15Svel.S30m/min • distancia hta.-pza. cte. • Curvas complejas presición media • Cambio de velocidad suave. ~. ~ ~ ~ ("!. ,a. Ñ. >. ~. s. z CI. ("!. ;;;! ,a lllJ. > (/).
(43) TAREA. .... e. VEL:. Tolerancia. Tipo de Movimiento. SOLDADURA POR ARCO. ~. 1 mm. ~O.lm/s :S:l mis. • Continuo • Curvas regulares/irreg. • Velocidad de avance constante • Separación de arco cte. PINTURA CON SPRAY. >±2 mm. ~.lm/s ~l mis. • Continuo • Suave • Curvas complejas • Distancia sup. pistola constante. CARGA/DESCAR GADE MÁQUINAS. ~. ~.5m/s Sl mis. • Continuo/Discontinuo • Curvas regulares/irreg. • Libre/ Obstáculos. 1 mm. Whta 3Kg máx.. Otros • Velocidad= f( 1, eelectrodo, sección transversal cordón) • Producción máx.= f(lmax, material , preparación) • Problemas por la variabilidad de pzas. • Variables: caudal pintura. Presión fluido/aire, Viscosidad pintura, Temperatura. O.lKg min 50 Kg máx. • Movimiento a velocidad máxima • Colocación de pzas. lenta • Para total en carga/descarga. !"' t"). TRANSPORTE. PALETIZACIÓN. >> lmm. t:?: 1 m/s. ~. 1 m/s. • Continuo/Discontinuo • Curvas regulares/irreg. • Libre/ Obstáculos. • Continuo/Discontinuo • Curvas regulares/irreg. • Libre. O.lKg min 50 Kg máx. 1 kg min 100 Kg. max. >. • No es importante conocer la ruta • Max velocidad = f( Fza. apriete,wpza, centro masa) • Para total en carga/descarga. ,,. • Para total en carga/descarga • Máxima velocidad. l!l!J. ~ ~ 1.9'.1. ~. >. t"). s.z e,. ;! ,, l!l!J. >. fil. Tabla 2.7.
(44) l i,. 'Tl. ati" ~ 1)). v:ft, ' .. IV. V \ ~1. ". r>. y.l. :¡. '7,. \. ,_. .. \:. ·t', 'l.. '. ,•. ll. '-. --l "'O. o. (/). (). ~. z. ~. o. o >. o >. e. e. e. ~. o. • • •. "O. z. "O. ª ª. • •. (). o ~ z e o. (). o. ~. z e o. • • • •. • • • • • • • ~J.·~~'I. TAREAS Soldadura Continua Pulido Corta Laser, arena , agua Desbarbado Taladrado Soldadura Puntos Pintura. • • • •. Transporte Paletización Carga/Descarga de Méquinas A:iilamiento Ensamble.
(45) Z. CPf<IIWR....... _TAftM. --. ..._. -. ou1,seii13 o,:ieds3. sa1e,:iuauodx3 9818P!OU9SOJ 58:J!UQJ seui1ds E>UIB!WOU!IDd u9!:>e1odJa1u1 e:i,19qeJ8d U9!:l!SU8JJ i. IHUII uo1:ie1odJ8lUI S'v'133~. S3SV1:>. o::::, z ~ o. o z ~ o. ::::,. ü. ¡::::. ,.......•N. ai ... ....... ~ U>. C'lt.o·. • • • •• • • • • • ••• • •• •. u9!:>e1n:>!W 01:ieds3. en a.. IO. <'lt.. ,o. o. Cll. -.. •• ••. fJi. S'v'3~1. ~. e,,_. ü. .J~. º\. ,\. n. !. 42. o. ~ a.. :::>. < oz :::>. a.. ~:::>. o. ::). z. a.. ~ o. <. o z ~. ü. (± 1c1 ,.. '-..... \~. . 'n.
(46) 2.. CARACTERIZACIÓN DE TAREAS. 1.3 DEFINICIÓN DEL CRITERIO DE MiNIMO TIEMPO. La información obtenida permite la definición de criterios, en este trabajo es de interés definir Mínimo Tiempo, algunas de sus características son:. • Para que el tiempo sea mínimo a lo largo de toda la ruta : a) se debe adoptar una velocidad máxima del órgano terminal, pero ésto si y solo si podrá realize cuando:. V. RUTA. s:. f (V. PROCESO). b) La tarea debe permitir tolerancias amplias durante el viaje, sin embargo en las posiciones de paro total puede alcanzarse una presición media.. c) El movimiento puede ser contínuo I discreto, al igual que libre/ obstáculos.. • Las tareas que pueden ser realizadas en mínimo tiempo son : Taladrado, Soldadura por puntos, Paletización, Carga y descarga de Máquinas, Transporte.. 43.
(47) CAPITUL03. '\. \. \ \. \. \. \. \. '·. - --~. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS.
(48) 3.. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. 3.1 INTRODUCCIÓN. La cinemática de robots, al igual que la cinemática de partículas, estudia los aspectos geométricos del movimiento de manipuladores sin considerar las fuerzas o torque que lo producen. Por otra, parte la dinámica del robot, trata con la formulación matemática de las ecuaciones diferenciales del movimiento del manipulador; describiendo su comportamiento en términos de las fuerzas y torques que lo producen. Estas pueden obtenerse de las leyes mecánicas de Newton o también de la formulación de Lagrange de la mecánica clásica. En este trabajo, el uso de la cinemática y dinámica de robots es fundamental para obtener trayectorias óptimas, como lo seftalan [Kim 87) y [Shin 85) y [Seshadri 86). Se han realizado grandes esfuerzos para obtener modelos cuya implementación computacional sea eficiente, sin perder de vista la presición en el control de la posición del manipulador y obtener una descripción completa de éste. Actualmente, existen 2 alternativas para aboprdar la cinemática de robots: l) Transformadas Homogéneas 2) Coefientes de Influencia La primera de ellas ha sido ampliamente utilizada, [Uicker 83 ], [Paul 79], [Pifta 92]. Sin embargo, [Wander · 92) ha demostrado que la descripción cinemática de robots a través de coeficientes cinemáticos de Influencia, introducida por [Benedict 86] y [Tesar 87], es computacionalmente mas eficiente que las transformadas Homogéneas.. [V azquez 93] presenta un modelo general para robots usando los coeficientes cinemáticos de Influencia y la formulación de Lagrange. Algunas ventajas de este modelo son:. • Menor tiempo de .implementación Computacional • Interpretación flsica directa • No se deriva para obtener el jacobiano o Hessiano •Homegenidad entre Cinemátuica y Dinámica de manipuladores.. Este modelo se ha implementado computacionalmente para obtener la ecuaciones en forma simbólica en Mathematica 2.2. A continuación se describirá el modelo presentado por [V azquez 93].. 45.
(49) 3 MODELO CINEMATICO Y DINAMICO DI: ROBOTS. -!. 1. ,,' ,,'. , ,,~ ,,' o• .. 1. 1. o o. ..e. ~. u. "O. G 6. • e. -1- 'J-. e, o. -¡;. 1 ~. C""l. ª. ·-""' 46.
(50) 3.. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. 3.2 MODELO GENERAL DE ROBOTS DE COEFICIENTES DE INFLUENCIA 3.2.1. MATRICES DE TRANSFORMACIÓN Este modelo utiliza la descripción de la orientación de los marcos coordenados asignados a cada una de las coordenadas generalizadas, a través de las matrices de rotación. Cada marco coordenado kth puede ser descrito en términos del jth , mediante el producto de matrices de rotación elementales:. La primera matriz describe la rotación del kth marco coordenado un ángulo "jk alrededor de Xjk y la segunda matriz, la rotación del kth marco un ángulo ek alrededor áe Zk. La forma de cada una de estas matrices es:. Al multipliplicar, la forma final de la matriz de transformación es:. c1 -sK o R} s._c11 c..cJl -sJk s~11 c~Jl c.Jk. 47.
(51) 3.. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. donde:. S1;=Sen81; S11=Sena..Jl. C1 =Cos81: CJt=Cosa.Jt. Las columnas de la matriz rotacional de transfonnación son los vectores unitarios del kth marco coordenado respecto al Jth marco coordenado:. Cada uno de los elementos de la matriz .R1k contienen infonnación de la orientación del kth sistema coordenado en las direcciones del Jth sistema coordenado.. R.,}. x.Jl•xkl x.Jl•y1. xJl•z.1. Jfl•xkl. Jik•J1. Y¡t•Z.1. l.¡1•:Xkl. 1:.¡t•J1. l.¡1•Z.1;. 3.2.2 CINEMÁTICA DE ROBOTS En la figura 3.1. se muestra un diagrama que describe el flujo de información entre cada una de las funciones mas importantes del modelo de coeficientes de Influencia. Como primer paso se asignan los marcos coordenados a cada articulación para posteriormente determinar los parámetros de Denavit-Hartengberg. · A continuación se construyen las matrices de rotación que describen la rotación entre marcos Rn-l n • y despues se realiza la multiplicación para obtener la descripción de cada marco coordenado respecto a el marco { O }. Después, de cada una de las matrices se separan los vectores columna Vxi , Vzi para la ith articulación y posteriomente se construye la función de posición, como sigue:. En forma general, esta se expresa por:. 48.
(52) 3 MODELO CINEMATICO Y DINAMICO DE ROBOTS. Matrlcea Rotación. Parametros. Separar vector. OH ~R,. ~R, :-!R,. ~R,. Velocidad Jacobiano T y R. ··['"H 1· 1 [ ,a, .,PI 1 q. R1 • 01 llGJ. J 1=. ~~ = z, .t. (rPI -. ~R, ~.. o. Función Posición t-1. rpt.,.. ~. S1.Z1 +. [a,,.1.t11+1 +d,.1.Z.·1 l .. •1 +. ~r,:;. ro¡l. ,pJ J I = awl aq, = .i:,,. lJ. Lagrange Energia Cinética y Trabajo virtual t = d ( oKE) _ aKE II. t"=VT[/"] 11. Aceleración HeaslanoTyR a=. ~1. CI +. a= [ 1G1. 1. wT. [. ex +. t[ wr [. [PºJ ,GJ. 11 w. rH1. J w. o. II. ". tf=E p•l. = [. l,J. ~. di dtf,;. +. qT. c3[1"1,,11 -. ee .p" ] 1. aq,. (F") T + ". t 11 .,.tL11 + t 111. Modelo general de Robots de Coeficientes de Influencia. Figura 3.1 49. [P:1. q. .! [ aJ•] 1 2. ~. [ ,p, 1, (m,)].
(53) 3.. MODELO CINEMÁTICO Y DINÁMICO DE ROBOI'S. donde: t-1. L l 0u+1Xu+1 +a,.1.ti+11 1-1. Describe a todos los eslabones intermedios entre el. primero. y la Kth articulación respecto al marco de referencia { O }.. Localiza al primer marco coordenadpo en la dirección del eje de movimiento de la primera articulación. Describe la localización de la herramienta u órgano terminal respecto al la kth articulación La forma general de la función de velocidad es la siguiente:. ú=. v+ n. x,. Se obtiene derivando la función de posición, de la siguiente forma:. Sin embargo, en [Vazquez 93] se demuestra que el conjunto de derivadas señaladas arriba puede sustituirse por productos vectoriales y de esta manera construir el Jacobiano del manipulador: a través de los coeficientes de influencia cinemáticos de primer orden. Para el jacobiano de rotación tenemos: k-1. (,)/=. .E(<,>, zJ l•l. los siguientes coeficientes de influencia.. 0(,)¡ [ RG1]1=-= Zp aq,. para i-1.j i = revoluci6n. 50.
(54) 3.. MODEW CINEMÁTICO Y DINÁMICO DE ROBOO'S. Para el Jacobiano de traslación, los coeficientes de influencia son los siguientes:. av,1 = .t_ x (r,. [ RGjJ1=. 1 - r 0¡), para i1J i = revoluci6n. 1. aq,. av., _. [ RG-1pi =:...:...J?l.= °'lt. zI. i 1.j ; i articulaci6n prismática. [ PjJ,=0 en. otro caso. Derivando la función de velocidad se obtiene la aceleración :. /. r pi=. 11. -. ~. -. 01. f:t [au.1-¡¡¡-+a,.1-¡¡¡1+--¡¡-r,dxu+1. <k,.1. d iR. En notación compacta:. donde:. [!. [G]]. Corresponde al Hessiano, que también se compone de una parte traslacional y una rotacional. En [Vazquez 93], se dan los coeficientes de influencia de segundo orden para determinar las componentes de la matriz Hessiana. Entonces la aceleración, tiene la forma:. 1-1. rpi= S1Z1 +. E l0u+rU+l +a,.1.Z.+11 + ~ t,, l•I 51.
(55) l.. a= [. P1 ]. ci. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. + c.>T [. .,H¡ ]. c.>. 3.2.3 DINÁMICA DEL MANIPULADOR Se hacen uso de las ecuaciones de movimiento de Lagrange y el principio de trabajo virtual para obtener los torque para cada articulación. Es importante señalar que la información cinemática generada con anterioridad se intergra directamente a la obtención del lagrangiano. La energía cinética de un cuerpo rígido es:. Insertando la velocidad lineal y angular:. Sin embargo, la matriz de inercia [ 1 ] de la ecuación anterior esta expresada con respecto al centro de masa Jth eslabon; para obtenerlo respecto al marco de referencia { O }, se realiza el siguiente producto:. entonces, la energía cinética para todo el manipulador es la suma de la energía cinética de los Jth eslabones :. La forma de esta ecuación, tomando encuenta las expresiones anteriores de energía cinética para un cuerpo rígido y la matriz de inercia para el Jth eslabón respecto al marco { O }, es: N. (KE,,.,)¡. =L. 21 (q T[ RGJ. f. [Di][ RGJ ] q + q , [. J•l. 52. P1 f. m¡ [ .P1 ] q ).
(56) l.. MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. Agrupando, los términos de la energía cinética en la matriz general de inercia: N. cr1 ::. E ce •º1 ir [Il)l •º1 1 + e.P1 ir m1 e .P1 1 >. 1•1. A continuación, se determinan las ecuaciones de movimiento usando la forma general de la ecuación de torque: ::.!!.( aKE) _ éJKE. t II. dt Ofl,.. oq,.. De la energía cinética obtenida anteriormente, se tiene:. de donde se obtiene la siguiente forma compacta:. [ Pn • ] Es una matriz de NxNxN, que contiene las fuerzas de reacción centrífugas y coriolis, cuya forma es:. N. [P;]IJ::. E [ 7",, ]~ m,, [ .P,, ],. + [ ,11,, ]IJ [Ilq1 [.o,,],. +[[ .o,, 1; [Ilq1 [[ .o,, ],. x [ •º· q•I. Aunque, el manipulador no tiene movimiento los actuadores tienen que soprtar el peso de los eslabone! y de la carga útil que se manipula. para incluir estas contribuciones en als ecuaciones se hace uso del principio de trabajo virtual. Entonces, los torques provocados por cargas estáticas se determina por:. tf ::E" [[ .P~ ], (F:t + [ •ºl ],(m1)] p-1. 53.
(57) MODELO CINEMÁTICO Y DINÁMICO DE ROBOTS. 3.. De esta manera, la forma general de la ecuación de torque esta dada por la siguiente suma: L. t 11 =tn + t. I 11. 3.3 SIMULACIONES DEL MODELO GENERAL. Para demostrar el uso del modelo general de robots de coeficientes de influencia se implementó en Mathematica V 2.2; para el cálculo tanto simbólico como numérico de las ecuaciones cinemáticas y dinámicas de un manipulador.. Para el uso del programa es necesario especificar la siguiente información: • Parámetros de Denavith Hartengberg • La matriz de inercia para cada eslabón y su masa. En el apéndice A se desearrollan tres ejemplos en forma simbólica correspondientes a los siguientes tipos de robots:. • • •. Robot Plano Articulado de 3 grados de Libertad Robot Polar de 3 grados de libertad. Los parámetros de Denavit Hartengberg para cada uno de los robots anteriormente señalados son:. ROBOT PI.ANO · Ardculación i l. 2 Efector Final. •.. o o o. o L l L2. 54. o o o. e e o.
Figure

![FIGURA 1.4.3. l s [ ' , ' , " ' ~ , , - . . . . . . . 1 1 r r t • r --. - ' ' 1 , , 1 ] -1 • •• ' ' ' - · · ..............](https://thumb-us.123doks.com/thumbv2/123dok_es/2179407.509340/11.924.280.714.357.667/figura-l-s-r-r-t-r.webp)

+7




Documento similar
[r]
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
En la base de datos de seguridad combinados de IMFINZI en monoterapia, se produjo insuficiencia suprarrenal inmunomediada en 14 (0,5%) pacientes, incluido Grado 3 en 3
En este ensayo de 24 semanas, las exacerbaciones del asma (definidas por el aumento temporal de la dosis administrada de corticosteroide oral durante un mínimo de 3 días) se
En un estudio clínico en niños y adolescentes de 10-24 años de edad con diabetes mellitus tipo 2, 39 pacientes fueron aleatorizados a dapagliflozina 10 mg y 33 a placebo,
• Descripción de los riesgos importantes de enfermedad pulmonar intersticial/neumonitis asociados al uso de trastuzumab deruxtecán. • Descripción de los principales signos
Debido al riesgo de producir malformaciones congénitas graves, en la Unión Europea se han establecido una serie de requisitos para su prescripción y dispensación con un Plan
Como medida de precaución, puesto que talidomida se encuentra en el semen, todos los pacientes varones deben usar preservativos durante el tratamiento, durante la interrupción
