Modelación de la interacción vehículo peatón sobre un mismo arco durante evacuaciones
94
0
0
Texto completo
(2)
(3) Al universo que ha conspirado para estar aquí y las (muchas) estrellitas que me han acompañado en mi camino.. iii.
(4) AGRADECIMIENTOS En primer lugar, quiero agradecer al Centro de Investigación para la Gestión Integrada de Desastres Naturales, CIGIDEN, que me brindó la oportunidad de investigar en temas de gestión de desastres que, probablemente, de otra manera no lo hubiese hecho. Además, agradezco a quienes, dentro del centro, me han apoyado ya sea con consejos o información relevante para la investigación. En segundo lugar, me gustaría agradecer a distintas instituciones que aportaron de alguna manera al desarrollo de esta investigación: la Ilustre Municipalidad de Iquique, el canal de televisión RTC, la Oficina Nacional de Emergencia (ONEMI) de la I Región de Tarapacá y a su director, Alejo Palma por su compromiso. También a la UOCT de la IV Región de Coquimbo que colaboró con material audiovisual. En tercer lugar, agradezco al Departamento de Ingeniería de Transporte y Logística, el cual me brindó todo el apoyo que necesité durante toda mi estadía en el programa de Magíster. A mis profesores supervisores, Juan Carlos Herrera y Ricardo Giesen, sin quienes todo este proyecto no hubiese sido posible. Por la paciencia, el tiempo (especialmente el tiempo) y los aprendizajes que son para la vida. Por último, un lugar especial a toda mi red de apoyo personal que estuvo siempre a mi lado, subiéndome el ánimo y apoyándome en este proceso. Por eso, un agradecimiento especial a mis papás (por la infinita paciencia), a mis hermanos (por el infinito cariño), a Gino (por todo, literalmente todo), a mis amigos (Isa, Poly, Alvarito, Netin, Negro, Oscarito, Lolo, Dieguito, Natan, Pedro, Pina, Fran, Morado, Fran por la preocupación y el inmenso cariño). Gracias miles. Y gracias al universo por una maravillosa experiencia.. iv.
(5) ÍNDICE GENERAL. 1.. Introducción.....................................................................................................1 1.1. Motivación .............................................................................................. 1 1.2. Objetivos y alcances de la investigación .................................................. 3 1.3. Organización de la tesis ...........................................................................4. 2.. Estado del arte .................................................................................................5. 3.. El modelo de transmisión de celdas (MTC) .................................................... 15 3.1. Ventajas del MTC .................................................................................. 21 3.2. Limitaciones del MTC ........................................................................... 21. 4.. Metodología y observaciones ......................................................................... 23 4.1. Características de la evidencia empírica ................................................. 23 4.1.1. Ventajas del material obtenido ..................................................... 26 4.1.2. Limitaciones del material obtenido .............................................. 27 4.2. Análisis de las grabaciones .................................................................... 27 4.2.1. Caracterización de la población ................................................... 28 4.2.2. Comportamiento de vehículos y peatones .................................... 30 4.2.3. Supuestos de modelación ............................................................. 34. 5.. Modelo de interacción vehículo – peatón sobre un mismo arco ...................... 35 5.1. Definiciones previas .............................................................................. 36 5.1.1. Diagrama triangular de cada clase ................................................ 36 5.1.2. Equivalencia Peatón-Vehículo (EPV), espacio total, espacio efectivo, espacio utilizado y espacio disponible .......................................... 38 5.2. Modelo matemático ............................................................................... 40 5.2.1. Representación del arco ............................................................... 40 5.2.2. Procedimiento general ................................................................. 42. 6.. Resultados y análisis ...................................................................................... 55 6.2. Análisis de sensibilidad de 𝜶 ................................................................. 64 6.3. Cambios al diagrama fundamental ......................................................... 73. 7.. Conclusiones.................................................................................................. 74 1.1. Contribuciones del modelo .................................................................... 74 1.2. Extensiones y trabajo futuro ................................................................... 75. Bibliografía ............................................................................................................. 77. v.
(6) ÍNDICE DE TABLAS Tabla 2-1 Modelos macroscópicos de evacuación (Elaboración propia).......................... 8 Tabla 2-2 Modelos macroscópicos tradicionales de tráfico usados para evacuaciones (Elaboración propia) .................................................................................................... 10 Tabla 2-3 Modelos macroscópicos de tráfico mixto vehículo - peatón usados en evacuaciones (Elaboración propia) ............................................................................... 13 Tabla 6-1 Parámetros de la simulación (Elaboración propia) ........................................ 58 Tabla 6-2 Resultados de la simulación (Elaboración propia)......................................... 59 Tabla 6-3 Resultados obtenidos de análisis de sensibilidad de α (Elaboración propia) .. 65. vi.
(7) ÍNDICE DE FIGURAS Figura 2-1 Línea de tiempo de modelos macroscópicos utilizados en evacuaciones (Elaboración propia) ...................................................................................................... 7 Figura 3-1 Diagrama de variable y(t) (Elaboración propia) ........................................... 16 Figura 3-2 Representación de variables S y R (Elaboración propia) .............................. 17 Figura 3-3 Situación que se desea modelar (Elaboración propia) .................................. 18 Figura 3-4 Diagrama de celdas para convergencia de flujos (Daganzo, 1994) ............... 18 Figura 3-5 Diagrama de flujos posibles en una convergencia de flujos (Daganzo, 1995) .................................................................................................................................... 19 Figura 4-1 Imágenes de grabaciones............................................................................. 25 Figura 4-2 Ejemplo de contraflujo vehicular en evacuación en Iquique ........................ 29 Figura 4-3 Clasificación de comportamientos observados (Elaboración propia)............ 30 Figura 4-4 Ejemplo de comportamiento observado en el cuadrante I ............................ 31 Figura 4-5 Ejemplo de comportamiento observado en el cuadrante II ........................... 31 Figura 4-6 Ejemplo de comportamiento observado en el cuadrante III .......................... 32 Figura 4-7 Ejemplo de comportamiento observado en el cuadrante IV (Obtenida de videos públicos en internet) ..................................................................................................... 33 Figura 5-1 Diagrama triangular de los vehículos (Elaboración propia).......................... 36 Figura 5-2 Diagrama trapezoidal de los peatones.......................................................... 37 Figura 5-3 Ejemplo de espacio total y espacio efectivo................................................. 39 Figura 5-4 Representación del arco en el modelo (Elaboración propia) ......................... 41 Figura 5-5 Diagrama del procedimiento general (Elaboración propia) .......................... 44 Figura 5-6 Determinación de Q'max,v (Elaboración propia) ......................................... 46 Figura 5-7 Ejemplo de movimiento de vehículos y peatones en sus arcos equivalentes (Elaboración propia) .................................................................................................... 49 Figura 5-8 Diagrama de distribución de flujos cuando comparten (Elaboración propia) 51 Figura 5-9 Casos posibles entre celdas que comparten información aguas abajo (Elaboración propia) .................................................................................................... 52 vii.
(8) Figura 6-1 Diagrama triangular para vehículos en simulaciones ................................... 55 Figura 6-2 Diagrama triangular de los peatones en simulaciones (Asano et al., 2007) ... 56 Figura 6-3 Arco modelado con sus parámetros (Elaboración propia) ............................ 59 Figura 6-4 Número acumulado de vehículos que entran y salen del arco (α=0,5) (Elaboración propia) .................................................................................................... 61 Figura 6-5 Número acumulado de peatones que entran y salen del arco (α=0,5) (Elaboración propia) .................................................................................................... 61 Figura 6-6 Campos de velocidad para vehículos (a) y peatones (b) (α=0,5) .................. 63 Figura 6-7 Número acumulado de vehículos que entran y salen del arco (α=1) ............. 66 Figura 6-8 Número acumulado de peatones que entran y salen del arco (α=1) .............. 67 Figura 6-9 Campos de velocidad para (a) vehículos y (b) peatones (α=1) ..................... 69 Figura 6-10 Número acumulado de vehículos que entran y salen del arco (α=0) (Elaboración propia) .................................................................................................... 71 Figura 6-11 Número acumulado de peatones que entran y salen del arco (α=0) (Elaboración propia) .................................................................................................... 71 Figura 6-12 Campos de velocidad para (a) vehículos y (b) peatones (α=0) ................... 72. viii.
(9) RESUMEN. La simulación de evacuación es una poderosa herramienta para el apoyo a la planificación de este tipo de procesos, especialmente cuando el tiempo de respuesta es limitado. Actualmente existen variados modelos de evacuación, pero ninguno de ellos considera la interacción entre peatones y vehículos sobre la misma vía de evacuación. Este comportamiento hace la planificación más compleja y ha sido observado en países como Chile. En esta tesis se propone un modelo matemático de naturaleza macroscópica basado en el Modelo de Transmisión de Celdas (Daganzo, 1994) o MTC. Las extensiones integradas al MTC se elaboraron a partir de evidencia empírica de evacuaciones reales en el norte de Chile. El modelo propuesto considera la interacción entre vehículos y peatones cuando estos comparten la misma vía de evacuación. El modelo propuesto permite evaluar el efecto que vehículos tienen sobre la evacuación de peatones y viceversa. Los resultados muestran que el principal efecto de una clase sobre la otra es sobre la velocidad de evacuación, sin verse afectado el tiempo total de vaciamiento de la red. Este modelo es general y, por lo tanto, puede ser aplicado en otras regiones del país y otros países, además de otro tipo de situaciones donde se observa una interacción entre vehículos y peatones. De este modo, puede servir como base para el desarrollo de una herramienta de simulación más completa que permita la simulación de una red real.. Palabras Claves: modelo macroscópico, evacuaciones, simulación de tráfico, Cell Transmission Model, Modelo de Transmisión de Celdas, tráfico mixto vehículo – peatón.. ix.
(10) ABSTRACT. Evacuation simulation is a powerful tool that can be used to support evacuation planning, especially when the response time is very short. At present there are many evacuation models, but none considers vehicle – pedestrian interaction over the same evacuation route. This kind of behavior makes evacuation planning more difficult and has been observed in countries like Chile. In this thesis a mathematical macroscopic model is proposed, based on the Cell Transmission Model (Daganzo, 1994). Extensions to the model were obtained from empirical evidence from real evacuations in the north of Chile. The proposed model considers vehicle – pedestrian interaction when evacuating on the same evacuation route. The proposed model allows to evaluate the effect that vehicles have on pedestrian’s evacuation and vice versa. Results obtained show that the main effect of one class over the other is regarding evacuation speeds, not affecting total clearance time. The model is general so it can be applied to other regions of the country or even other countries where vehicle – pedestrian interaction is observed. Thereby, it can be used as a base to develop a more complete simulation tool in the future.. Keywords: macroscopic model, evacuations, traffic simulation, Cell Transmission Model, mixed vehicle – pedestrian traffic.. x.
(11) 1. 1. INTRODUCCIÓN 1.1.Motivación Los desastres naturales, que incluyen terremotos, volcanes, tornados, tsunamis, incendios, inundaciones y huracanes, han sido causantes de pérdidas tanto de vidas como monetarias en diversas regiones del mundo. Solo en la última década, entre 2005 y 2015, se han registrado más de cuatro mil eventos de este tipo alrededor del mundo (EM-DAT, 2016). Estos han sido la causa de casi un billón de afectados (ver Anexo 1-1) y pérdidas por daños que alcanzan los 1500 billones de dólares (ver Anexo 1-2). Tras un desastre natural que afecta a gran parte de la población, grandes masas de personas deberán moverse desde zonas de bajo riesgo a zonas de seguridad. Para planificar los procesos de evacuación, con tal de disminuir el riesgo al que se encuentra expuesta la población, se debe considerar el instante en que se da la alarma, el tiempo de respuesta de la población, la información con la que cuente la gente previo al desastre, las instrucciones entregadas durante este, las características geográficas y físicas de la zona a evacuar y aquellas propias de la población y las condiciones en las que esta se encuentra (Pel et al., 2012). Adicionalmente, dos características propias del tipo de desastre son también las principales determinantes de la forma en que se planifica el proceso de evacuación. La primera de ellas es el tiempo de preparación con que se cuenta frente a un desastre natural (ver Anexo 1-3). Por ejemplo, los huracanes se pueden predecir con hasta varios días de anticipación, por lo que los procesos de evacuación en estos casos son generalmente organizados y constan de distintas etapas en las que se evacúa a distintas zonas. Frente a la posibilidad de un traslado organizado de la población a una zona segura, el movimiento puede realizarse en vehículos sin encontrar grandes congestiones o demoras que puedan resultar mortales. Por otro lado, los terremotos no pueden predecirse, por lo que el tiempo de respuesta después de haber ocurrido son solo minutos. En estos casos, las evacuaciones generalmente se realizan según planes cuyo detalle es ya conocido por la población. El traslado a una zona segura puede ser realizado en el medio de transporte definido por las autoridades, aunque generalmente se.
(12) 2. realiza a pie o bien en vehículos motorizados pequeños y medianos como autos particulares y motocicletas. Considerando la gran cantidad de factores que deben ser integrados, la planificación de este tipo de evacuaciones resulta ser muy complicada, dificultad que aumenta considerablemente cuando distintos modos de transporte interactúan en una misma red. Particularmente, el tráfico entre peatones y vehículos puede resultar especialmente complejo, debido a la diferencia de tamaños de ambos modos y las velocidades a las que transitan, lo que resulta en interacciones muy distintas a las que se observan entre vehículos motorizados. Frente a esto, la utilización de herramientas de simulación es de gran ayuda, llegando a ser muchas veces incluso indispensable (Pel et al., 2012). Estos modelos permiten a las autoridades tomadoras de decisiones prever el comportamiento de los evacuados, para así generar planes de evacuación que eviten congestiones y accidentes. La experiencia ha mostrado que, si bien en Chile las autoridades recomiendan realizar siempre la evacuación a pie, aún existe parte de la población que escoge su vehículo particular para dirigirse a la zona de seguridad. De este modo, peatones y vehículos comparten la misma vía de evacuación. Esta característica de tráfico mixto donde una de las clases es más pequeña también ha sido observado en otros países del mundo, y no solo entre peatones y vehículos, sino que también entre vehículos y bicicletas, peatones y bicicletas, peatones y motocicletas, entre otros (Jiang y Wu, 2006). Actualmente Chile no cuenta con ningún tipo de herramienta que apoye la elaboración de una correcta planificación, pero si se cuenta con planes de evacuación. Frente a la ocurrencia de terremotos y tsunamis, todas las ciudades costeras de Chile cuentan con un Plan de Protección Civil ante Tsunami (ver Anexo 1-4), desarrollado por la Oficina Nacional de Emergencia (ONEMI). Este está basado en la Carta de Inundación por Tsunami, elaborada por el Servicio Hidrográfico y Oceanográfico de la Armada de Chile y entrega información sobre la zona de potencial inundabilidad, la zona de seguridad, los puntos a los que la población debe dirigirse a la hora de evacuar y las vías de evacuación por las cuales se deben alcanzar dichos puntos. Pero la identificación de las vías de evacuación no consideró las características particulares de cada ciudad, como su geografía, el tamaño de las calles ni la.
(13) 3. capacidad de cada vía. Tampoco fue integrada la interacción entre distintos modos de transporte ni las consecuencias que esto puede generar sobre la evacuación. Si bien existen múltiples herramientas que sirven a este propósito en otros países, estas no cumplen con simular eventos con las características buscadas en esta investigación. En primer lugar, muchas de estas herramientas se enfocan en evacuaciones frente a desastres que entregan un tiempo de respuesta de días y no de minutos, necesarios en el caso de terremotos y tsunamis. En segundo lugar, la interacción entre vehículos y peatones no es considerada, asumiendo que ambas clases se mueven en redes separadas, lo que no representa el caso chileno. En último lugar, los escasos modelos que buscan modelar a vehículos y peatones en una misma red lo hacen bajo un enfoque microscópico, lo que significa la necesidad de mucha información para su funcionamiento, la cual en general no está disponible. 1.2.Objetivos y alcances de la investigación El objetivo de esta investigación es desarrollar un modelo matemático de tráfico mixto que simule la interacción entre vehículos y peatones cuando comparten un mismo arco, el que puede representar una vía de evacuación. El modelo propuesto está diseñado para evacuaciones frente a desastres naturales que entregan un corto tiempo de preparación (minutos), como terremotos y tsunamis. Esto significa, que se modelan procesos en los que el movimiento no está previamente organizado y el cual generalmente tampoco es regulado. El modelo está basado en el Cell Transmission Model (Daganzo, 1994, 1995) o Modelo de Transmisión de Celdas (MTC) y se desarrolló a partir de supuestos obtenidos de evidencia empírica. Observaciones a grabaciones de evacuaciones reales ocurridas en Chile el año 2014 permitieron identificar el comportamiento de peatones y vehículos al momento de evacuar. La naturaleza macroscópica del modelo propuesto le permite funcionar sin mucha información, lo cual es de gran importancia cuando esta no está disponible o es muy difícil de encontrar. El modelo propuesto también puede ser utilizado en otro tipo de situaciones en la que se observe una interacción entre vehículos y peatones, como a la salida de conciertos y eventos deportivos. Asimismo, puede ser implementado en otras regiones del mundo, ya.
(14) 4. que cuenta con ciertos parámetros que representan el comportamiento de la población de un lugar en específico. Por último, a diferencia de otros modelos, considera el tamaño de cada clase y el espacio físico de cada una de ellas utiliza. Esto permite modelar la reducción de capacidad producida por otra clase sobre un mismo arco. Con el modelo propuesto es posible simular un arco único, sin entradas ni salidas, por lo que no cuenta con intersecciones ni cruces peatonales. Sobre dicho arco se mueven vehículos y peatones al mismo tiempo, sin interactuar otra clase con ellos. Finalmente, y en base a la evidencia empírica, solo es modelado flujo unidireccional, despreciando la aparición de individuos que se dirijan a otros destinos antes de evacuar a una zona segura. 1.3.Organización de la tesis El resto de la tesis se organiza como sigue. En el capítulo 2 se realiza una extensa revisión bibliográfica de modelos que han sido o podrían ser utilizados para modelar evacuaciones. Luego, en el capítulo 3, se describe brevemente el MTC (Daganzo, 1994). El capítulo 4 describe la metodología seguida y las observaciones obtenidas a partir de la evidencia empírica. En el capítulo 5 se explica el modelo matemático. A continuación, en el capítulo 6 se presentan las simulaciones llevadas a cabo y los resultados obtenidos. Por último, en el capítulo 7 se entregan conclusiones y posibles extensiones al modelo propuesto..
(15) 5. 2. ESTADO DEL ARTE El interés por el desarrollo de herramientas computacionales para analizar y evaluar planes de evacuación nació a finales de los años 70. En un principio el objetivo se centró solo en situaciones como desastres nucleares y huracanes, debido principalmente a que estos eventos se pensaban los más probables en Estados Unidos (Hardy y Wunderlich, 2008). Luego, eventos como terremotos, tsunamis, inundaciones, erupciones volcánicas y ataques terroristas fueron también incluidos en los trabajos. Las primeras herramientas de apoyo fueron creadas específicamente para situaciones de emergencia, por lo que los modelos utilizados consideran diferentes patrones de demanda, comportamiento de los evacuados, etc. (Pel et al., 2012). Más tarde y hasta el día de hoy, se han utilizado modelos tradicionales de tráfico para modelar situaciones de emergencia. Esto ha permitido aplicar modelos ya existentes solo cambiando la forma en que se comportan los individuos, en lugar de desarrollar modelos totalmente nuevos. La manera en que típicamente todos estos modelos se organizan es según el nivel de detalle y la escala geográfica del análisis. Bajo esta lógica los modelos pueden pertenecer a una de dos categorías: microscópicos o macroscópicos, habiendo un compromiso entre el nivel de precisión y la capacidad de resolución de ambos (Hardy y Wunderlich, 2008). Hay autores que, adicionalmente, añaden a los modelos mesoscópicos como una categoría que se encontraría entre los modelos descritos anteriormente (Hardy y Wunderlich, 2008). Los modelos microscópicos se caracterizan por reproducir el movimiento de cada individuo dentro de una red, pudiendo diferenciar a cada uno de sus elementos según sus propias características y entregando así resultados con un mayor nivel de detalle. Sin embargo, este tipo de herramientas requiere de mucha información que muchas veces no está disponible, lo que genera programas poco eficientes computacionalmente. Ejemplos de simuladores que utilizan modelos microscópicos son OREMS (Rathi y Solanki, 1993), CEMPS (Pidd et al., 1993), IMDAS (Franzese y Han, 2001), INTEGRATION (Van Aerde, 1994), PARAMICS (Cova y Johnson, 2003), VISSIM (Han y Yuan, 2005) y CORSIM (Williams et al., 2007). De estos, solo los últimos tres casos corresponden a modelos que, a pesar de haber sido.
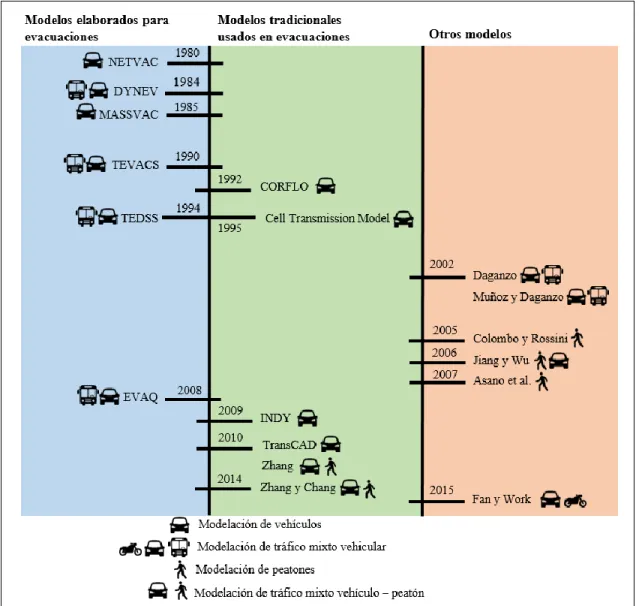
(16) 6. desarrollados para situaciones de evacuación, también han sido aplicados a condiciones normales de tráfico. Los modelos mesoscópicos, en general, manejan el movimiento de elementos en grupos y a través de probabilidades. De este modo pueden representar áreas geográficas más amplias que los modelos microscópicos y, al mismo tiempo, producir resultados más minuciosos que los macroscópicos (Hardy y Wunderlich, 2008). Hay otros modelos que también reciben esta denominación al combinar modelos microscópicos y macroscópicos, como por ejemplo DYNASMART (Mahmassani et al., 1994) y DynaMIT (Ben-Akiva et al., 1998). Ambos modelos han sido utilizados para evacuaciones, pero no fueron creados con ese objetivo. A diferencia de los modelos microscópicos, los de tipo macroscópico utilizan variables agregadas para describir las condiciones del tráfico en una red, sin diferenciar a cada uno de sus componentes. Generalmente esto lo logran a través de relaciones entre velocidad, densidad y flujo (Lan, 2004). Su gran ventaja es que requieren de una menor cantidad de información y, generalmente, son de mayor rapidez en su resolución. En la Figura 2-1 se muestra una línea de tiempo en la que se ubican los principales modelos macroscópicos de evacuación (a la izquierda), los modelos macroscópicos tradicionales que han sido utilizado para situaciones de emergencia (en el centro) y otros modelos de relevancia para esta investigación (a la derecha)..
(17) 7. Figura 2-1 Línea de tiempo de modelos macroscópicos utilizados en evacuaciones (Elaboración propia). Debido a que uno de los objetivos de esta investigación es el desarrollo de un modelo que sea de rápida ejecución y fácil implementación, se optó por un modelo de tipo macroscópico, razón por la cual se profundizará a continuación al respecto. En la Tabla 2-1 se listan los principales modelos macroscópicos de evacuación..
(18) 8. Tabla 2-1 Modelos macroscópicos de evacuación (Elaboración propia) Modelo. Referencia. Considera tráfico mixto Homogéneo Heterogéneo No No. NETVAC. Sheffi et al. (1982). DYNEV. KLD Associates Inc. (1984) FEMA (S/I1). No. Si. No. Si. Hobeika y Jamei (1985) Han (1990). No. No. Si. No. Hobeika et al. (1994) Pel et al. (2008). No. Si. Si. No. PCDYNEV MASSVAC TEVACS TEDSS EVAQ. Tiempo de respuesta Largo tiempo de respuesta. Largo tiempo de respuesta. Largo tiempo de respuesta. Largo tiempo de respuesta. Largo tiempo de respuesta Corto tiempo de respuesta. Largo tiempo de respuesta.. Uno de los primeros modelos macroscópicos elaborados para evacuaciones fue NETVAC (Sheffi et al., 1982), en el contexto de evacuaciones alrededor de plantas nucleares. Este modelo de simulación usa relaciones entre el flujo, la densidad y la velocidad para reproducir el proceso de evacuación en una red representada como un grafo dirigido. Tiene la ventaja de representar la formación de colas y de su simple aplicabilidad, pero solo considera un modo de transporte, el vehículo, sin dar espacio a otros modos de transporte (Sheffi et al., 1982). Cabe destacar que este modelo ya no es utilizado actualmente, ya que ha sido reemplazado por simuladores de mayor complejidad (Hardy y Wunderlich, 2008). Sucesor de NETVAC es TEVACS (Han, 1990). Este modelo se basa en el mismo procedimiento del simulador anterior, pero integra distintos tipos de vehículos interactuando en la misma red. Esto lo hace transformando el número total de vehículos en una unidad equivalente en pasajeros, llamada passenger car unit, o PCU (Han, 1990). Esta homogeneización de los distintos tipos de vehículos impide al modelo analizar efectos que puede tener la reducción de capacidad sobre los distintos modos de transporte. TEVACS tampoco es utilizado actualmente.. 1. Solo se cuenta con información del modelo, no de los detalles de la publicación..
(19) 9. En 1984, KLD Associates Inc. desarrollaron el modelo DYNEV, que años más tarde quedó obsoleto al ser reemplazado por PCDYNEV, elaborado por la Federal Emergency Management Agency (FEMA) (Hardy y Wunderlich, 2008). Ambos modelos representaron una mejora sustancial respecto a los modelos anteriormente mencionados: la integración de evacuación multimodal, representando en la modelación a vehículos y buses en la misma red. Sin embargo, esta particularidad es limitada, ya que los buses se representan en base a rutas, horarios y paradas fijas (Pel et al., 2012), lo que no permite analizar cambios de capacidad inesperados durante la evacuación. PCDYNEV fue utilizado en redes reales y de mayor tamaño que otros modelos en los Estados Unidos (Hardy y Wunderlich, 2008). Posteriormente se publicó MASSVAC (Hobeika y Jamei, 1985), también basado en NETVAC (Pel et al., 2012). MASSVAC, a diferencia de NETVAC fue desarrollado para la evacuación de áreas rurales frente al peligro de huracanes. Posteriormente, en 1994, se publicó la extensión de MASSVAC, TEDSS (Hobeika et al., 1994). Este último ofrece la posibilidad de evaluar distintos escenarios bajo condiciones de desastres humanos y naturales. De esta forma, se incorpora implementación de desastres que dejan un corto tiempo de respuesta a los evacuados, que difiere de otros eventos donde la organización de la evacuación se puede realizar con anterioridad. En estos aún no se considera la interacción entre distintos modos de transporte en una misma ruta ni la reducción de capacidad debido al mismo desastre o al proceso de evacuación. Pel et al. (2008) publicaron el simulador macroscópico EVAQ, destinado para una variedad de emergencias tales como huracanes, incendios forestales e inundaciones. El modelo presenta dos grandes ventajas respecto a modelos anteriores. La primera es que combina la evacuación regulada por autoridades con la evacuación voluntaria, que tiende a no estar programada con anterioridad. La segunda es que introduce la idea de cambios en la capacidad de las vías de evacuación, considerando el efecto que el mismo desastre puede generar sobre las velocidades y direcciones del flujo de los evacuados. Además de TEVACS, que fue concebido para distintos modos de transporte, los modelos DYNEV, TEDSS y EVAQ fueron posteriormente extendidos para integrar tráfico mixto a la modelación. No obstante, los modos de transporte son vehículos motorizados en todos los.
(20) 10. casos, por lo que la interacción con elementos de menor tamaño y significativamente distinta velocidad (como lo son los peatones) no es considerada. Por otro lado, el movimiento de peatones ha sido estudiado principalmente bajo una perspectiva microscópica. La mayoría de estos trabajos se enfocan en el movimiento de masas en redes destinadas solo a peatones o la evacuación dentro de edificios. Para mayor información sobre estos modelos ver Zheng et al., 2009. Además, estos modelos se desarrollaron pensando en evacuaciones pre-organizadas, donde la población evacúa de acuerdo a cierto orden en sus vehículos. Por esta razón no se consideran peatones. Debido a las limitaciones que los modelos elaborados solo para situaciones de emergencia presentaron, a partir de los años 90 se comenzaron a usar modelos tradicionales de tráfico para la simulación de situaciones de emergencia (Pel et al., 2012; Murray-Tuite y Wolshon, 2013). En la Tabla 2-2 se entrega una lista de modelos macroscópicos tradicionales que, además de ser utilizados bajo condiciones regulares de tráfico, se han aplicado a situaciones de emergencia.. Tabla 2-2 Modelos macroscópicos tradicionales de tráfico usados para evacuaciones (Elaboración propia). 2. Modelo CORFLO. Referencia FHWA (S/I2). Cell Transmission Model. Daganzo (1994). INDY. Klunder et al. (2009). TransCAD. Wang et al. (2010). S/N. Zhang (2010). S/N. Zhang y Chang (2014). Comentarios Modelación de vehículos. Base de herramientas usadas para evacuaciones. Modelación de vehículos con un MTC. Modelación de vehículos bajo distintos eventos de emergencia. Modelación de vehículos. Mide tiempo de vaciamiento de la red. Modelación de vehículos y peatones aplicando un MTC. Modelación de vehículos y peatones en intersecciones.. Solo se cuenta con información del modelo, no de los detalles de la publicación..
(21) 11. CORFLO es una combinación de otros modelos de transporte y ha sido base para herramientas computacionales que han sido utilizadas en situaciones de emergencia. Estas aplicaciones han sido tanto en modelos mesoscópicos como macroscópicos. CORFLO tiene la ventaja de haber integrado una nueva lógica para la asignación de tráfico basada en el tiempo de viaje en cada arco (Wang y Prevedouros, 1996). El Modelo de Transmisión de Celdas o MTC (Daganzo, 1994, 1995), es una discretización del llamado modelo LWR (Lighthill y Whitham, 1955; Richards, 1956). Utiliza la modelación basada en celdas para describir las condiciones de tráfico de forma agregada en cada una de las celdas. Si bien este modelo no fue desarrollado para situaciones de emergencia, ha sido aplicado en herramientas que simulan evacuaciones. Algunas de las aplicaciones de este modelo han sido desarrolladas por Chiu et al. (2006), cuyo objetivo fue encontrar destinos óptimos de evacuación al minimizar el tiempo de evacuación para una red completa. Dixit y Radwan (2009) se enfocaron en la determinación del instante en que distintas zonas bajo riesgo deben evacuar, estrategia importante para resguardar a una población en potencial riesgo debido a huracanes. Zhang (2010) utilizó el modelo basado en celdas para generar estrategias de ruteo óptimo de peatones y vehículos en una misma red. INDY incorpora los llamados “eventos”, en los cuales las características de la red y los parámetros del modelo pueden ir variando en el tiempo. De este modo, integra el dinamismo que se observa durante las evacuaciones. En este modelo, las rutas pueden ser parte del input, lo que permite evaluar distintos escenarios considerando vías de evacuación predefinidas. TransCAD combina la plataforma macroscópica de simulación con un sistema de información geográfica. Está diseñado para, en caso de ser utilizado en evacuaciones, entregar el tiempo que demora una red en vaciarse (es decir, el tiempo total de evacuación de la red) y mostrar cómo cambian los patrones de tráfico a través del tiempo. El modelo permite identificar los cuellos de botella de la red, con el objetivo de mejorar los planes de evacuación. No se encontraron modelos macroscópicos de simulación del movimiento de peatones en caso de evacuación. Estos modelos generalmente se restringen al interior de edificios y son analizados desde una perspectiva microscópica. Modelos que consideren la interacción de.
(22) 12. distintos modos de transporte también son escasos, especialmente aquellos que simulen a vehículos y peatones en la misma red. Zhang (2010) desarrolló un modelo mixto de vehículos y peatones basándose en el método de celdas, donde se permite el movimiento bidireccional de los peatones. Si bien los peatones no están restringidos al interior de edificios, sí lo están en una red que comprende veredas, cruces peatonales y zonas exclusivas para peatones. Mientras que a los vehículos se les permite circular solo por la red vehicular. De este modo, no hay interacción entre ambas clases en una misma red y solo se comunican en puntos donde los peatones suben a su vehículo. Posteriormente, Zhang y Chang (2014) se basaron en el modelo de optimización propuesto por Zhang (2010) para introducir un modelo de planificación cuyo objetivo es coordinar los flujos de peatones y vehículos durante una evacuación. Utilizando un modelo ya publicado, la contribución de esta publicación se centró en el apoyo a autoridades responsables de las evacuaciones frente a situaciones críticas como estas (Zhang y Chang, 2014). Por último, se destacan algunos modelos en la Tabla 2-3 que, si bien no han sido concebidos ni utilizados en situaciones de emergencia, presentan ciertas características relevantes para la investigación..
(23) 13. Tabla 2-3 Modelos macroscópicos de tráfico mixto vehículo - peatón usados en evacuaciones (Elaboración propia) Referencia. Modo(s) considerado(s) Daganzo (2002) Vehículos lentos y vehículos rápidos Muñoz y Daganzo (2002) Vehículos lentos y vehículos rápidos Colombo y Rosini (2005) Peatones. Jiang y Wu (2006). Vehículos y peatones. Asano et al. (2007). Peatones. Fan y Work (2015). Vehículos de menor y mayor tamaño. Comentarios Análisis de cuello de botella móvil. Análisis de cuello de botella móvil. Modelación de peatones considerando fenómeno de sobrecompresión. Densidad de peatones afecta velocidad de vehículos. No ha sido usado en evacuaciones. Modelación de peatones a través de un MTC. Modelación del fenómeno de creeping con transición de fases.. Daganzo (2002) propone una teoría de comportamiento de tráfico vehicular para vías de más de una pista. Reconoce dos tipos de conductores, aquellos que son más tímidos y aquellos que se comportan más agresivamente. El gran aporte de este modelo es que integra a ambos tipos de vehículos en un mismo diagrama, bajo un análisis de cuello de botella móvil. En este se reconocen dos estados: 2-pipe y 1-pipe. El primero hace referencia al momento en que ambos tipos de vehículos se mueven a flujo libre por pistas separadas de la vía. El segundo reconoce la situación congestionada, en que ambos tipos de vehículos se mezclan y, por lo tanto, circulan a una misma velocidad. Luego, Muñoz y Daganzo (2002) se basaron en el mismo análisis de Daganzo (2002) para tratar a los cuellos de botella móviles como una condición de borde que puede integrarse a la teoría de las ondas cinemáticas. A través de observaciones experimentales muestran que esta nueva teoría predice acertadamente el comportamiento de estos dos tipos de vehículos. El concepto de 2-pipe y 1-pipe es de gran relevancia para la situación que se busca simular en esta investigación. Se espera que un flujo mixto de vehículos y peatones cumpla con estos dos regímenes. El primero cuando ambas clases se mueven por separado y el segundo cuando los vehículos deben circular a la velocidad de los peatones debido a la congestión en la vía..
(24) 14. La gran limitación de los diagramas definidos por Daganzo (2002) respecto a una interacción entre vehículos y peatones es que ambos vehículos son de igual tamaño. Colombo y Rosini (2005) (y posteriormente Colombo et al. (2010)) postulan que el comportamiento de los peatones, en situaciones de emergencia, puede ser representado por un diagrama similar al fundamental. Basándose en este último, simulan el movimiento de un conjunto de individuos a través de un arco al final del cual se encuentra una puerta como única salida. Postulan que los peatones sufren un efecto llamado sobre compresión, bajo el cual pueden aumentar el flujo al superar cierta densidad dada. Bauer et al. (2007), por otro lado, discuten una serie de técnicas para modelar una multitud que sale de un evento especial, como partidos de fútbol o conciertos. Utilizan un modelo macroscópico discreto en tiempo y espacio y asumen que todo el flujo se mueve en una sola dirección (Bauer et al., 2007). Jiang y Wu (2006) utilizan la teoría de gases para modelar a los peatones que son considerados como individuos que caminan aleatoriamente. Por otro lado, se les permite a los vehículos moverse a velocidades mayores que una celda por intervalo de tiempo, a diferencia de otros modelos de este tipo. Lo más interesante es que consideran que la velocidad de los vehículos se ve afectada por la densidad de los peatones (Jiang y Wu, 2006), lo cual resulta ser muy realista en evacuaciones. Este modelo no ha sido utilizado en evacuaciones ni fue elaborado con este propósito. Asano et al. (2007) aplican un MTC a la modelación de peatones, siendo de los pocos modelos macroscópicos de peatones que se han desarrollado. Para esto, asumen un diagrama trapezoidal para describir el movimiento de los peatones. Consideran que el movimiento puede ser multidireccional, es decir, horizontal, vertical y/o diagonal. En cada una de las celdas puede haber más de un peatón, lo que permite el análisis agregado de estos. Por último, Fan y Work (2015) estudiaron el fenómeno de creeping basándose en un modelo de transición de fases. Este fenómeno es el que se observa cuando vehículos de mayor tamaño interactúan con vehículos de menor tamaño, pudiendo estos últimos aún moverse por la vía cuando los primeros se encuentran detenidos. Este comportamiento es similar al que esperaría encontrarse entre peatones y vehículos..
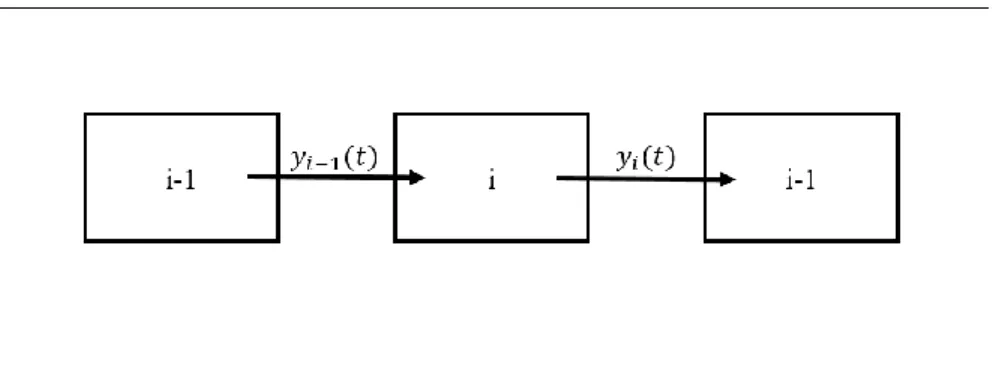
(25) 15. 3. EL MODELO DE TRANSMISIÓN DE CELDAS (MTC) En este capítulo se explica brevemente el MTC, sus principales ecuaciones y las extensiones que ha tenido para la convergencia de flujos. Luego se exponen las principales ventajas y limitaciones que tiene el MTC al momento de modelar una situación con las características que se buscan en esta investigación. El MTC es un modelo que permite analizar la evolución de un flujo de vehículos en el tiempo y el espacio, cuya resolución es coherente con la teoría del modelo LWR (Lighthill y Whitham, 1955; Richards, 1956). Para esto, la vía se divide en secciones homogéneas de largo ∆𝑥, llamadas celdas, que se numeran consecutivamente desde aguas arriba (i=1) hasta aguas abajo (i=I). El tiempo, a su vez, se discretiza en intervalos de largo ∆𝑡. Se asume que la máxima distancia que cada vehículo puede avanzar es ∆𝑥, es decir, que no puede saltarse una celda en un intervalo de tiempo. Para asegurar la estabilidad del modelo, se requiere que 𝑣𝑓 ≤. ∆𝑥 ∆𝑡. . Donde 𝑣𝑓 es la máxima velocidad a la que pueden transitar los vehículos por la vía.. Luego, en cada una de las celdas i, el número de vehículos en dicha celda en un instante de tiempo se representa por 𝑛𝑖 (𝑡). La simulación estará basada en una recursión tal que la ocupación de la celda i en el instante (𝑡, 𝑡 + ∆𝑡) estará dada por su ocupación en el instante t, más el número de vehículos que logró ingresar a la celda i desde la celda (i-1) entre t y 𝑡 + ∆𝑡 (𝑦𝑖−1 (𝑡)), menos el número de vehículos que sale de la celda i hacia la celda (i+1) entre t y 𝑡 + ∆𝑡 (𝑦𝑖 (𝑡)). Esto se expresa en la ecuación ( 3.1 ) (ver Figura 3-1): 𝑛𝑖 (𝑡 + ∆𝑡) = 𝑛𝑖 (𝑡) + 𝑦𝑖−1 (𝑡) − 𝑦𝑖 (𝑡). ( 3.1 ). Donde 𝑛𝑖+1 (𝑡 + ∆𝑡) es el número de vehículos en la celda i+1 en el intervalo (𝑡 + ∆𝑡) e 𝑦𝑖 (𝑡) estará dado por la ecuación ( 3.2 ): 𝑦𝑖 (𝑡) = min{𝑛𝑖 (𝑡), 𝑄𝑖+1 (𝑡), 𝛿(𝑁𝑖+1 (𝑡) − 𝑛𝑖+1 (𝑡))}. ( 3.2 ). Donde 𝛿 = 𝑤⁄𝑣𝑓 . El primer término de la ecuación ( 3.2 ) representa el número de vehículos presentes en la celda i en el instante t. El segundo término es la capacidad máxima con que cuenta la celda aguas abajo i+1. El tercer término representa el espacio disponible en la celda i+1, en términos del número de vehículos que caben en ella..
(26) 16. Figura 3-1 Diagrama de variable y(t) (Elaboración propia) Se introducen entonces dos parámetros adicionales: 1) Número máximo de vehículos que puede estar presente en la celda i en el intervalo de tiempo t: 𝑁𝑖 (𝑡) = ∆𝑥 ∙ 𝑘𝑗 ,. ( 3.3 ). donde ∆𝑥 es el largo de la celda i y se define tal que ningún vehículo pueda recorrer más de esta distancia en un intervalo de simulación, si es que se moviese a velocidad de flujo libre, 𝑣𝑓 . 𝑘𝑗 es la máxima densidad que se puede observar en la vía, la que se alcanza cuando la ocupación es máxima y la velocidad es nula. 2) Capacidad de descarga de la celda i hacia la celda i+1 en el intervalo de tiempo t, representada por: 𝑄𝑖 (𝑡) = ∆𝑡 ∙ 𝑞𝑚𝑎𝑥 ,. ( 3.4 ). donde 𝑞𝑚𝑎𝑥 corresponde a la capacidad máxima de descarga de la vía. Alternativamente, la ecuación ( 3.2 ) puede reescribirse en términos del número de vehículos que sale de una celda y el número de vehículos que entra en la siguiente. Se define 𝑆𝑖 (𝑡) como el número de vehículos que puede salir de la celda i en el intervalo (𝑡, 𝑡 + ∆𝑡), definido en la ecuación ( 3.5 ); y 𝑅𝑖+1 (𝑡) como el número de vehículos que la celda i+1 puede recibir entre t y 𝑡 + ∆𝑡, dado el espacio disponible que tenga en ese instante, como muestra la ecuación ( 3.6 )..
(27) 17. 𝑆𝑖 (𝑡) = min{𝑄𝑖 (t), 𝑛𝑖 (t)}. ( 3.5 ). 𝑅𝑖+1,𝑝 (𝑡) = min{𝑄𝑖+1 (t), 𝛿(𝑁𝑖+1 (𝑡) − 𝑛𝑖+1 (𝑡))}. ( 3.6 ). De esta manera, la ecuación ( 3.2 ) se reescribe como la ecuación ( 3.7 ). 𝑦𝑖 (𝑡) = 𝑚𝑖𝑛{𝑆𝑖 (𝑡), 𝑅𝑖+1 (𝑡)}. ( 3.7 ). La Figura 3-2 explica la interacción entre estas variables.. Figura 3-2 Representación de variables S y R (Elaboración propia) Posteriormente, en 1995, Daganzo publicó una extensión al modelo. Esta segunda parte del MTC incluye la modelación de arcos convergencia y arcos divergencia en la red. Solo la modelación de convergencia de dos flujos en uno solo es relevante para la investigación, por lo que la divergencia de flujos no será mencionada. La situación a modelar es aquella en la que dos arcos, con sus respectivos parámetros, desean descargar su flujo en un mismo arco común, el que tiene una capacidad máxima μ (ver Figura 3-3)..
(28) 18. Figura 3-3 Situación que se desea modelar (Elaboración propia) Esta situación, a su vez, puede modelarse como un sistema de tres celdas, tal como se muestra en la Figura 3-4.. Figura 3-4 Diagrama de celdas para convergencia de flujos (Daganzo, 1994) En la Figura 3-4, el número de vehículos que se mueve entre las celdas Bk y Ek en un intervalo (t, t+1) se denomina 𝑦𝑘 (𝑡). Análogamente, 𝑦𝑐𝑘 (𝑡) será el número de vehículos que se mueve entre Ck y Ek en el mismo intervalo de tiempo. Tanto 𝑦𝑘 (𝑡) como 𝑦𝑐𝑘 (𝑡) van a depender del número máximo de vehículos que puede ser enviado de las celdas aguas arriba (𝑆𝑘 𝑦𝑆𝑐𝑘 ) y del número de vehículos que puede ser recibido en las celdas aguas abajo entre t y 𝑡 + ∆𝑡 (𝑅𝐸𝑘 ). 𝑅𝐸𝑘 considera que la capacidad μ de la celda Ek puede no ser suficiente para recibir las descargas de ambos arcos aguas arriba. Entonces, se distinguen tres casos (ver Figura 3-5): (i) cuando ambas celdas Bk y Ck desean enviar más vehículos de los que pueden ser recibidos por la celda Ek; (ii) cuando ambas celdas desean enviar más vehículos de los que pueden ser recibidos aguas abajo, pero solo.
(29) 19. una de ellas experimenta condiciones de congestión; y (iii) cuando el total de vehículos que se desean mover hasta la celda Ek puede ingresar en esta, ya que la restricción es mayor. En la Figura 3-5 se observa un rectángulo formado por 𝑆𝑘 𝑦𝑆𝑐𝑘 , el que indica la combinación de flujos que desean salir desde las celdas aguas arriba, Bk y Ck. El punto P indica esta combinación. La recta de pendiente positiva que indica la forma en que los flujos de ambas celdas Bk y Ck se mezclarán. Esta razón es tal que 𝑝𝑘 es la fracción de vehículos que ingresarán desde la celda Bk y, por consiguiente, (1 − 𝑝𝑘 ) la fracción de vehículos desde la celda Ck. Las rectas de pendiente negativa representan la restricción de capacidad (𝑅𝐸𝑘 ) de la celda aguas abajo. Se muestran tres de estas rectas, cada una indicando uno de los casos mencionados anteriormente.. Figura 3-5 Diagrama de flujos posibles en una convergencia de flujos (Daganzo, 1995).
(30) 20. A continuación se explica cada caso en detalle. a) Caso (i): En el caso (i), la intersección entre las rectas de pendiente positiva y negativa se encuentra dentro del rectángulo formado por 𝑆𝑘 𝑦𝑆𝑐𝑘 . Esto quiere decir que 𝑆𝑘 + 𝑆𝑐𝑘 > 𝑅𝐸𝑘 y, adicionalmente, ambas celdas aguas arriba quedarán con vehículos que no podrán moverse aguas abajo. La combinación óptima de ambos flujos, dados por la recta de pendiente positiva, está dada por el punto Q. b) Caso (ii): En el caso (ii), la intersección entre las rectas de pendiente positiva y negativa se encuentra fuera del rectángulo formado por 𝑆𝑘 𝑦𝑆𝑐𝑘 . Además, la recta de pendiente negativa intersecta con dicho rectángulo. Esto significa que, si bien 𝑆𝑘 + 𝑆𝑐𝑘 > 𝑅𝐸𝑘 , solo una de las celdas aguas arriba quedará con vehículos que no podrán avanzar. La combinación resultante estará dada por el punto R. c) Caso (iii): En este último caso, el punto P se encuentra por debajo de la restricción de capacidad dada por 𝑅𝐸𝑘 . Además, puede observarse que la intersección entre las rectas de pendiente positiva y negativa se encuentra fuera del rectángulo formado por 𝑆𝑘 𝑦𝑆𝑐𝑘 . Esto significa que la celda aguas abajo será capaz de recibir todos los vehículos que desean moverse desde la celdas Bk y Ck. Es decir: 𝑆𝑘 + 𝑆𝑐𝑘 ≤ 𝑅𝐸𝑘 . Asumiendo que, mientras sea posible, se moverá el número máximo de vehículos posibles, se obtiene que 𝑦𝑘 = 𝑆𝐵𝑘 y 𝑦𝑐𝑘 = 𝑆𝑐𝑘 . Finalmente, se puede notar que las soluciones para los casos (i) y (ii) son los puntos medios de las tres intersecciones de la recta 𝑅𝐸𝑘 con el rectángulo (R, R’, R’’ y Q, Q’, Q’’), dado por 𝑆𝐵𝑘 y 𝑆𝐶𝑘 . Entonces, generalizando, cuando 𝑅𝐸𝑘 < 𝑆𝐵𝑘 + 𝑆𝐶𝑘 se tiene que: 𝑦𝑘 = 𝑚𝑖𝑑{𝑆𝐵𝑘 , 𝑅𝐸𝑘 − 𝑆𝑐𝑘 , 𝑝𝑘 ∙ 𝑅𝐸𝑘 }. ( 3.8 ). 𝑦𝐶𝑘 = 𝑚𝑖𝑑{𝑆𝐶𝑘 , 𝑅𝐸𝑘 − 𝑆𝐵𝑘 , 𝑝𝐶𝑘 ∙ 𝑅𝐸𝑘 }. ( 3.9 ). Luego, la actualización del número de vehículos se hace de acuerdo a la conservación de vehículos de la ecuación ( 3.1 ), para cada una de las celdas..
(31) 21. 3.1.Ventajas del MTC La naturaleza macroscópica del modelo permite que se requiera menos información para su implementación. Esto resulta en un modelo más eficiente computacionalmente, que es lo que se busca en esta investigación. Adicionalmente, el enfoque discreto en tiempo y espacio hace más simple la resolución del modelo. Estas características hacen que el modelo cumpla con ser una herramienta de apoyo a autoridades tomadoras de decisión sin que estas tengan conocimientos previos del área. La representación del tráfico a través del diagrama fundamental representa otra gran ventaja, ya que tanto vehículos como peatones pueden modelarse bajo esta perspectiva. Por otra parte, el flujo unidireccional de vehículos se asemeja al flujo que se esperaría encontrar durante una evacuación. En esta, los individuos se mueven desde una zona bajo riesgo hasta una zona de seguridad, siguiendo una misma dirección. Por último, el modelo es lo bastante general como para permitir su implementación en cualquier arco que cumpla con ciertos aspectos determinados. Solo conociendo los parámetros del diagrama triangular de una vía es posible modelar el comportamiento vehicular. Cabe destacar que existe una serie de otros diagramas fundamentales que relacionan las variables de flujo, densidad y velocidad, al igual que el diagrama triangular. Sin embargo, este último ha sido el más utilizado durante las últimas décadas, ya que es el que mejor representa el comportamiento vehicular. Debido a que el MTC se desarrolló en base al diagrama triangular, este será el diagrama utilizado también en esta investigación.. 3.2.Limitaciones del MTC A pesar de las ventajas ya mencionadas, el MTC (Daganzo, 1994) cuenta con ciertas limitaciones para su implementación a evacuaciones mixtas. Por un lado, al no considerar la interacción entre distintas clases, el movimiento en la vía se describe solo a través de una serie de parámetros. Esto no ocurre en condiciones de tráfico mixto, donde cada clase cuenta con sus propios parámetros, los que van a determinar el valor.
(32) 22. de la función de transferencia, 𝑦𝑖 (𝑡). Esta función determina el flujo que finalmente logra moverse de una celda a otra, por lo que para definir el flujo de cada clase que logra moverse, se necesitaría un conjunto de parámetros para cada una de las clases. Por otro lado, el modelo ajusta el largo de cada celda e intervalo de simulación de acuerdo al diagrama triangular definido. De este modo, al interactuar dos clases con parámetros distintos, el ajuste de la longitud de celda e intervalo de simulación no será el mismo para ambas clases. Esto presenta un gran problema ya que, como se mencionó, la longitud de cada celda (∆𝑥) debe cumplir con que ningún vehículo avance más de dicha distancia en un intervalo de tiempo ∆𝑡. Si las clases presentes tienen distintas velocidades de flujo libre (𝑣𝑓 ) podría no haber coincidencia entre ∆𝑥, ∆𝑡 y 𝑣𝑓 . Finalmente, al no integrar tráfico mixto, el tamaño de distintas clases no es tomado en consideración. Esta característica va a determinar el espacio disponible en cada celda y toma especial relevancia cuando interactúan clases que ocupan una misma vía en distintas proporciones. La ocupación de una celda por una clase de menor tamaño va a diferir de la que tiene una clase de mayor tamaño, observándose que el número de elementos de una de las clases que puede avanzar de una celda a otra será distinta que para la otra clase. Las extensiones que serán integradas al MTC en esta investigación se enfocan en estas limitaciones y serán presentadas en los capítulos siguientes..
(33) 23. 4. METODOLOGÍA Y OBSERVACIONES El objetivo de este capítulo es comprender cómo se comportan vehículos y peatones durante una evacuación, para así saber qué fenómenos debe ser capaz de replicar el modelo. Esto es muy complejo, dado que este tipo de eventos ocurre inesperadamente, dificultando la preparación de equipos de observación, grabación y recolección de datos. Debido a esto también es que el material relativo a procesos de evacuación es escaso o, muchas veces, inexistente. Además de videos hechos públicos por sus mismos dueños en internet, se pudo contar para esta investigación con el apoyo de los principales canales de televisión de Chile. Gracias al Centro de Investigación para la Gestión Integrada de Desastres Naturales (CIGIDEN), dichos canales entregaron parte del material que recopilaron tras dos terremotos en el norte de Chile. Este material corresponde a las transmisiones en televisión abierta y contiene videos de evacuaciones reales ocurridas luego del terremoto y de la serie de réplicas que le siguieron. Los videos obtenidos fueron observados y analizados, resultando en los supuestos de modelación que serían posteriormente ingresados al modelo matemático. Adicionalmente, y teniendo en cuenta que el comportamiento observado depende las características de la misma población y su entorno, se realizó una caracterización de la población. Esto con el objetivo de identificar qué atributos deben considerarse al momento de aplicar el modelo propuesto. Los supuestos de modelación fueron base para el desarrollo del modelo. 4.1.Características de la evidencia empírica El día martes 1 de abril del año 2014, a las 20:48, un terremoto de 8,2 grados en la escala de Richter afectó a la zona norte de Chile, específicamente a las regiones I de Tarapacá y XV de Arica y Parinacota. Un día después, el 2 de abril, a las 23:43, otro movimiento telúrico de 7,8 grados en escala de Richter afectó a la misma zona. Debido a la intensidad de los sismos, en ambas ocasiones se ordenó la evacuación de la población en zonas que podrían inundarse debido a un posterior tsunami. Estos eventos fueron cubiertos por los principales canales de televisión del país (C13, CHV, Mega y TVN), los que transmitieron en directo desde las zonas afectadas durante varias horas al día..
(34) 24. A través del Centro de Investigación para la Gestión Integrada de Desastres Naturales, CIGIDEN, se obtuvo acceso a dichas transmisiones entre el 1 de abril y el 3 de abril del año 2014. El material obtenido consta tanto de grabaciones realizadas por los mismos periodistas como de videos caseros que personas afectadas enviaron a los canales. Así, se cuenta con videos captados durante el momento preciso en que se llevaba a cabo el proceso de evacuación, de la perspectiva de los propios evacuados. Además, debido a la intensidad de los sismos del 1 y 2 de abril, hubo otras réplicas que también llevaron a la población de Iquique a evacuar hacia la línea de seguridad. De este modo, se tienen grabaciones en distintos puntos de la ciudad y en diversos momentos del día. La Figura 4-1 muestra instantes de las grabaciones.. Figura 4-1a. Figura 4-1b. Figura 4-1c. Figura 4-1d.
(35) 25. Figura 4-1e. Figura 4-1f. Figura 4-1g. Figura 4-1h. Figura 4-1i. Figura 4-1j. Figura 4-1 Imágenes de grabaciones (Obtenidas de grabaciones de C13, CHV, Mega y TVN).
(36) 26. 4.1.1. Ventajas del material obtenido En primer lugar, es posible observar la interacción entre vehículos y peatones en las vías de evacuación, lo que es de gran relevancia para la investigación. Esto se explica porque, aunque la recomendación de la Oficina Nacional de Emergencia (ONEMI) y la Ilustre Municipalidad de Iquique (IMI) es evacuar a pie, sigue existiendo parte de la población que lo hace en su vehículo particular. De esta manera, entorpecen la evacuación de los peatones y el mismo flujo vehicular, produciendo importantes demoras. Este comportamiento puede observarse claramente en las imágenes c, d, f, g, h, i y j de la Figura 4-1. En segundo lugar, las grabaciones son recientes y es posible observar distintos escenarios. Dado que ambos sismos ocurrieron en la noche, se cuenta con varias grabaciones de evacuaciones nocturnas (imágenes b, c, d, h e i). Mientras que, como hubo una serie de réplicas durante un par de días después del primer sismo, también se cuenta con grabaciones en escenarios diurnos (imágenes a, e, f, g y j). Por otro lado, las imágenes muestran flujos puramente peatonales (imagen a), puramente vehiculares (imágenes b y e) y mixtos (imágenes c, d, f, g, h, i y j). En tercer lugar, las grabaciones corresponden a evacuaciones reales que se llevaron a cabo y no a simulacros previamente calendarizados. Estos simulacros, organizados periódicamente por la ONEMI a nivel regional o nacional, son una fuente de información a la que es más fácil acceder. Sin embargo, al estar la población preparada, no actúa como lo haría bajo una evacuación real. Adicionalmente, durante los simulacros las fuerzas policiales controlan el flujo vehicular, lo que no ocurre durante evacuaciones reales, y no se observa interacción entre vehículos y peatones. De todos modos, cabe destacar que los simulacros son de gran relevancia para que la gente tome conciencia del peligro de los desastres naturales y conozca sus vías de evacuación más cercanas. Finalmente, Chile no cuenta con un protocolo para conservar imágenes que hayan sido obtenidas por instituciones gubernamentales durante este tipo de eventos. Así, estas grabaciones representan adquisiciones importantes, de las que se puede obtener mucha información. De esta manera, se colabora para que el conocimiento y desarrollo del área.
(37) 27. de la gestión de desastres siga creciendo. Todo con la finalidad de preparar mejor a la población. 4.1.2. Limitaciones del material obtenido La gran limitación del material obtenido es que las grabaciones solo muestran lo experimentado en secciones acotadas de una vía de evacuación en particular y, además, durante un intervalo de tiempo que no supera los tres minutos (aproximadamente). Se desearía que en estas pudiese observarse la evolución del tráfico en un segmento de la vía más grande y durante un intervalo de tiempo más largo. De esta manera se tendría información más realista sobre cómo interactúan los evacuados en todo lo largo de la vía de evacuación y, por otra parte, se podrían identificar puntos conflictivos a lo largo de la vía. Adicionalmente, al contar con información de una zona del país en particular, no es posible distinguir si las interacciones observadas corresponden a una característica propia de la región o de la situación particular que fue grabada. Si bien muchas ciudades de Chile cuentan con las mismas características geográficas, la forma de reaccionar frente a estos eventos no tiene por qué ser necesariamente la misma. Características como la experiencia de desastres naturales anteriores, la preparación de las autoridades, el estado de la red de evacuación o el tipo de desastre pueden afectar la manera en que la población de comporta. Cabe destacar que, si bien el material observado no es representativo de todos los escenarios posibles, la evidencia empírica obtenida no refuta ninguna de las hipótesis presentadas en las secciones siguientes. 4.2.Análisis de las grabaciones El objetivo del análisis de las grabaciones es comprender cómo se lleva a cabo un proceso de evacuación. A continuación, primero se entrega una breve caracterización de la población que se observa en las grabaciones. Dado que el modelo se basó en el comportamiento observado en estas grabaciones, deben considerarse las características.
(38) 28. propias de las personas y su entorno. Luego se resumen los hallazgos más importantes y los supuestos de modelación que se obtuvieron a partir de estos. 4.2.1. Caracterización de la población Gracias al material obtenido y a la investigación de cómo se llevan a cabo las evacuaciones en la zona norte de Chile, se pudo determinar las principales características que definen a su población. Estas características pueden tener efecto directamente en las situaciones de emergencia y los procesos de evacuación, de ahí su relevancia. La población de la zona norte de Chile habita principalmente en la línea costera. En un área con constante riesgo de movimientos telúricos e inundaciones por tsunamis, hacen que sus habitantes se encuentren en constante alerta. Adicionalmente, las autoridades han colaborado con esta preparación, realizando simulacros de terremoto y tsunami periódicamente, publicando las vías de evacuación en todo lugar público e informando con campañas de educación. Todas estas características han generado una población que se encuentra, generalmente, más preparada para actuar frente a una evacuación que otras regiones del país. Por otro lado, la red vial de la ciudad presenta calles solo en dos sentidos: paralelas al mar o perpendiculares a él. Esto contribuye a que la evacuación sea lógica, ya que casi todas las vías se alejan del mar y llegan a la línea de seguridad. De todos modos, cabe destacar que el hecho que sean vías de evacuación no significa que presenten las características de seguridad necesarias para ello. Es muy común ver vías de evacuación muy angostas, con construcciones alrededor que pueden desprender escombros o con vehículos estacionados o abandonados a ambos lados, reduciendo el área para evacuar. También cabe destacar que las regiones del norte de Chile presentan las tasas más altas de parque vehicular cada 100.000 habitantes en el país (INE, 2015), lo que se puede explicar por el hecho que la I Región de Tarapacá es catalogada como Zona Franca, por lo que los vehículos resultan más económicos que en el resto del país. Es principalmente debido a esto que el uso del vehículo particular es una problemática al momento de realizar evacuaciones masivas. Esto lleva a que, además, muchos vehículos se.
(39) 29. encuentren abandonados en las calles, estorbando la circulación normal de los vehículos y a que pueda haber muchos vehículos en la red durante una evacuación. Muchas de las ciudades de la zona norte de Chile también presentan áreas cercanas a la zona de seguridad donde la pendiente aumenta considerablemente. La pendiente puede determinar la velocidad de evacuación, especialmente de peatones, lo que llevaría a flujos que se mueven más lentamente. Esta característica no fue considerada en el modelo, ya que generalmente la zona de seguridad está lejos de la línea costera. Por esta razón, el modelo se restringe a la modelación de arcos donde la pendiente es nula. Investigaciones llevadas a cabo en el CIGIDEN han mostrado que durante las evacuaciones hay comportamientos no deseados de parte de la población. Esto hace referencia a cualquier individuo que no se dirija directamente a la zona de seguridad luego de un terremoto, incluyendo a algunos que se mueven a contraflujo de quienes desean evacuar (ver Figura 4-2). Sin embargo, la misma evidencia muestra que, si bien estos comportamientos están presentes, ocurren muy raramente, por lo que son despreciables.. Figura 4-2 Ejemplo de contraflujo vehicular en evacuación en Iquique (Obtenida de videos públicos en internet) Por último, no se observó ningún tipo de regulación o fiscalización de la evacuación. Esto se debe principalmente a que ni las fuerzas policiales pueden actuar sin orden directa de las autoridades, ni estas últimas pueden actuar sin contar con toda la.
(40) 30. información necesaria. Es decir, que las autoridades no regulan el proceso de evacuación, por lo que el uso del vehículo no está limitado. Hay que tener en cuenta que, puesto que la evidencia empírica fue base para la modelación matemática, el modelo propuesto se basa en un contexto en el que las características anteriormente mencionadas están presentes. 4.2.2. Comportamiento de vehículos y peatones Para caracterizar el comportamiento general de vehículos y peatones bajo distintos niveles de congestión, se generó el diagrama de la Figura 4-3.. Figura 4-3 Clasificación de comportamientos observados (Elaboración propia) En el cuadrante I, vehículos y peatones circulan por separado, tal como se muestra en la Figura 4-4. Se observa que ambas clases tienen el espacio suficiente para circular libremente. Así, ambas lo harán a su velocidad de flujo libre y se moverán como dos flujos separados. Esto equivale a lo que Daganzo (2002) llama régimen 2-pipe..
(41) 31. Figura 4-4 Ejemplo de comportamiento observado en el cuadrante I (Obtenida de grabaciones de MEGA) La situación descrita en el cuadrante II se observa cuando los vehículos ya han alcanzado una densidad tal que han ocupado casi todo el espacio disponible en la calle. En este caso la velocidad de los vehículos es baja, por lo que los peatones podrían utilizar el espacio entre los vehículos para transitar. Este tipo de comportamiento es lo que Daganzo (2002) describe como régimen 1-pipe. Tal como se ve en la Figura 4-5, los peatones se mantienen al margen de la calle, observándose nuevamente dos flujos separados.. Figura 4-5 Ejemplo de comportamiento observado en el cuadrante II (Obtenida de videos públicos en internet) Las situaciones descritas anteriormente se pueden resumir bajo el siguiente postulado:.
(42) 32. Observación N°1: A bajos niveles de densidad peatonal, independiente del nivel de congestión de los vehículos, ambas clases se moverán como dos flujos separados. Es decir, los flujos no se mezclan a lo largo de la vía.. En el cuadrante III los peatones han pasado a utilizar gran parte de la calle y los vehículos presentes no pueden avanzar a la velocidad deseada. En la Figura 4-6 se observa que los vehículos deben permanecer detrás o entre medio de los peatones, por lo que deben circular a la velocidad de estos. Las grabaciones muestran que, de tener el espacio suficiente, los vehículos intentarán adelantar a los peatones.. Figura 4-6 Ejemplo de comportamiento observado en el cuadrante III (Obtenida de grabaciones de TVN) El cuadrante IV describe una situación crítica, en la que vehículos y peatones desean utilizar el espacio disponible en la vía de evacuación. La Figura 4-7 es un ejemplo de esto, donde se observa una gran masa de peatones y, al mismo tiempo, dos filas de vehículos que utilizan completamente la calle. Las grabaciones muestran que en este caso los peatones se mantendrán lo más cerca posible a la vereda, sin interrumpir el flujo vehicular. Los vehículos, por su parte, intentarán utilizar todo el espacio disponible para no dejar espacio a que peatones ocupen la vía..
(43) 33. Figura 4-7 Ejemplo de comportamiento observado en el cuadrante IV (Obtenida de videos públicos en internet) Las situaciones descritas por los cuadrantes III y IV coinciden en que el número de peatones no es despreciable en el arco. Esto significa que, en ambos casos, los vehículos probablemente no podrán circular a su velocidad de flujo libre, quedando restringidos o bien a la velocidad de los peatones o a una velocidad mayor a los peatones, pero menor a su velocidad de flujo libre, debido a la congestión. Esto quiere decir que, en caso de estar tanto vehículos como peatones bajo condiciones de congestión, se puede observar un régimen 1-pipe o uno de tipo 2-pipe, dependiendo de la situación. El primero se dará en caso que los peatones se muevan por entre los vehículos y el segundo en caso de que cada clase circule independientemente. Esto puede resumirse en la siguiente observación:. Observación N°2: A altos niveles de congestión peatonal, independiente del nivel de congestión de los vehículos, los vehículos circulan a la velocidad de los peatones.. Adicionalmente, se observó que los peatones experimentaron situaciones de congestión. Es decir:.
Figure



+7





Documento similar
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
dente: algunas decían que doña Leonor, "con muy grand rescelo e miedo que avía del rey don Pedro que nueva- mente regnaba, e de la reyna doña María, su madre del dicho rey,
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
De hecho, este sometimiento periódico al voto, esta decisión periódica de los electores sobre la gestión ha sido uno de los componentes teóricos más interesantes de la
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
