Evaluación experimental de esquemas adaptivos de control tolerante a fallas basados en el modelo de referencia
129
0
0
Texto completo
(2) Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Monterrey. División de Mecatrónica y Tecnologías de la Información Programa de Graduados. Los miembros del comité de tesis recomendamos que el presente proyecto de tesis presentado por Roberto Esteban Cruz Reynoso sea aceptado como requisito parcial para obtener el grado académico de: Maestro en Ciencias con Especialidad en Automatización. Director de las Maestrías en Electrónica y Automatización de la DMTI Mayo 2011.
(3) EVALUACIÓN EXPERIMENTAL DE ESQUEMAS ADAPTIVOS DE CONTROL TOLERANTE A FALLAS BASADOS EN EL MODELO DE REFERENCIA. POR: ROBERTO ESTEBAN CRUZ REYNOSO. TESIS. Presentada al Programa de graduados en Mecatrónica y Tecnologías de Información Este trabajo es requisito parcial para obtener el grado de Maestro en Ciencias con Especialidad en Automatización. INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY. MAYO 2011.
(4) A mis padres, hermanos y abuelos, por todo el apoyo y amor que siempre me han dado.. Gracias..
(5) AGRADECIMIENTOS. Extiendo mi más sincero agradecimiento a todas las personas que contribuyeron directa o indirectamente en la realización de esta tesis. Al Dr. Luis Eduardo Garza, por su guía y apoyo como asesor y profesor. A la M. en C. Adriana Vargas por su apoyo como sinodal y por toda la ayuda brindada durante la realización de este proyecto. A la Dra. Irma Yolanda Sánchez, por su apoyo como sinodal y las facilidades brindadas en la utilización del equipo de laboratorio. A mis compañeros de la maestría, Israel Becerra, Violeta Casillas, Diana Torres, Vicente Díaz y Ricardo Sánchez Rubio porque su amistad y apoyo hicieron más placenteros todas las tareas, proyectos y momentos de estudio..
(6) ÍNDICE. CAPÍTULO 1 INTRODUCCIÓN ..................................................................................................................................... 1 1.1 Motivación y Generalidades. ....................................................................................................... 1 1.2 La Propuesta ............................................................................................................................... 3 1.2.1 Definición del Problema.......................................................................................................... 3 1.2.2 Objetivos................................................................................................................................. 4 1.3 Contribución de la Tesis .............................................................................................................. 5 1.4 Alcances y Limitaciones. ............................................................................................................. 6 1.5 Descripción del sistema de prueba. .............................................................................................. 6 1.5.1 Descripción de las Fallas ....................................................................................................... 8 1.6 Organización de la Tesis .............................................................................................................10 1.7 Trabajos Relacionados ................................................................................................................10. CAPÍTULO 2 MARCO TEÓRICO .................................................................................................................................14 2.1 Control Adaptivo por Modelo de Referencia (MRAC) ................................................................14 2.1.1 MRAC Basado en la Regla del MIT. .......................................................................................15 2.1.2 MRAC Basado en la Teoría de Lyapunov................................................................................18 2.2 MRAC con retroalimentación de la salida en la trayectoria de antealimentación. .........................21 2.3 MRAC de Estructura Variable (VS-MRAC) ...............................................................................23 2.4 Control PID. ...............................................................................................................................25 2.5 Algoritmos Genéticos .................................................................................................................26. CAPÍTULO 3 ESQUEMAS DE CONTROL ...................................................................................................................28 3.1 Identificación del Modelo de la Planta ........................................................................................28 3.2 Controlador PID .........................................................................................................................29 3.3 Controlador Adaptivo por Modelo de Referencia (MRAC) ..........................................................29 3.3.1 MRAC Basado en la Regla del MIT (MRAC-MIT)...................................................................30 3.3.2 MRAC Basado en la Teoría de Lyapunov (MRAC-LYA) ..........................................................31 3.4 Controlador Adaptivo por Modelo de Referencia con PID ...........................................................32 3.4.1 MRAC Basado en la Regla del MIT con PID (MRAC-MIT-PID) .............................................32 3.4.2 MRAC Basado en la Teoría de Lyapunov con PID (MRAC-LYA-PID) .....................................33 3.4.3 Sintonización de los controladores PID ..................................................................................33 3.5 Esquemas MRAC de Estructura Variable. ...................................................................................34 3.5.1 VS-MRAC ..............................................................................................................................34 3.5.2 VS-MRAC con función Saturación (VS-MRAC-SAT) ...............................................................36 3.5.3 VS-MRAC con función Saturación y PI (VS-MRAC-SAT-PI) ...................................................37. i.
(7) CAPÍTULO 4 PRUEBAS Y RESULTADOS ...................................................................................................................39 4.1 Descripción de las pruebas de desempeño ante fallas en actuador y sensor. ..................................39 4.2 MRAC con distintos valores del parámetro de velocidad de actualización....................................40 4.2.1 MRAC-MIT con Diferentes Valores de , Fallas Abruptas ......................................................41 4.2.2 MRAC-MIT con Diferentes Valores de , Fallas Graduales....................................................43 4.3 Comparación entre los esquemas PID, MRAC-MIT y MRAC-LYA. ...........................................46 4.3.1 Fallas Abruptas......................................................................................................................47 4.3.2 Fallas Graduales ...................................................................................................................49 4.4 Comparación entre los esquemas MRAC-MIT y MRAC-MIT-PID..............................................50 4.4.1 MRAC-MIT vs. MRAC-MIT-PID, Fallas Abruptas. .................................................................51 4.4.2 MRAC-MIT vs. MRAC-MIT-PID, Fallas Graduales. ...............................................................53 4.5 Comparación entre los esquemas MRAC-LYA y MRAC-LYA-PID. ...........................................55 4.5.1 Fallas Abruptas......................................................................................................................56 4.5.2 Fallas Graduales ...................................................................................................................58 4.6 Esquemas de control VS-MRAC.................................................................................................59 4.6.1 VS-MRAC ..............................................................................................................................59 4.6.2 VS-MRAC-SAT.......................................................................................................................60 4.6.3 VS-MRAC-SAT-PI ..................................................................................................................61 4.6.4 Comparación del esquema VS-MRAC-SAT-PI contra el esquema MRAC-MIT-PID. ................62 4.7 Resumen de resultados ...............................................................................................................66. CAPÍTULO 5 CONCLUSIONES Y TRABAJO FUTURO .............................................................................................68 5.1 5.2. Conclusiones ..............................................................................................................................68 Trabajo Futuro ...........................................................................................................................69. APÉNDICE A Gráficas de las Pruebas con MRAC-MIT para diferentes valores de ...................................................74 A.1. Pruebas con Fallas Abruptas ............................................................................................................74 A.2. Pruebas con Fallas Graduales...........................................................................................................81. APÉNDICE B Gráficas de las Pruebas con los esquemas PID, MRAC-MIT y MRAC-LYA..........................................89 B .1. Pruebas con Fallas Abruptas ..........................................................................................................89 B.2. Pruebas con Fallas Graduales ...........................................................................................................93. APÉNDICE C Gráficas de las Pruebas con los esquemas MRAC-MIT y MRAC-MIT-PID. .........................................96 C. 1. Pruebas con Fallas Abruptas. ..........................................................................................................96 C.2. Pruebas con Fallas Graduales. ....................................................................................................... 101. ii.
(8) APÉNDICE D Gráficas de las Pruebas con los esquemas MRAC-LYA y MRAC-LYA-PID. ....................................... 105 D. 1. Pruebas con Fallas Abruptas ........................................................................................................ 105 D. 2. Pruebas con Fallas Graduales ....................................................................................................... 108. REFERENCIAS ...................................................................................................................................... 113. iii.
(9) ÍNDICE DE TABLAS. Tabla 3.1. Parámetros del controlador PID...................................................................................................29 Tabla 3.2. Parámetros de los PID utilizados en los controladores MRAC-MIT-PID. ....................................34 Tabla 4.1. MSE de pruebas MRAC-MIT para distintos valores de Fallas Abruptas .................................43 Tabla 4.2. MSE de pruebas MRAC-MIT para distintos valores de Fallas Graduales. ...............................45 Tabla 4.3. MSE del los esquemas de control PID, MRAC-MIT y MRAC-LYA para fallas abruptas. ............48 Tabla 4.4. MSE del los esquemas de control PID, MRAC-MIT y MRAC-LYA para fallas graduales. ...........50 Tabla 4.5. Lista de pruebas con el esquema MRAC-MIT-PID. .....................................................................51 Tabla 4.6. MSE obtenido de las pruebas con MRAC-MIT y MRAC-MIT-PID para fallas abruptas. ..............52 Tabla 4.7. MSE obtenido de las pruebas con MRAC-MIT y MRAC-MIT-PID para fallas graduales. ............54 Tabla 4.8. Lista de pruebas con el esquema MRAC-LYA-PID. ....................................................................55 Tabla 4.9. MSE de las pruebas con MRAC-LYA y MRAC-LYA-PID para fallas abruptas. .........................57 Tabla 4.10. MSE obtenido de las pruebas con MRAC-LYA y MRAC-LYA-PID para fallas graduales. ........59 Tabla 4.11. MSE obtenido de las pruebas con VS-MRAC-SAT-PI para fallas abruptas ................................64 Tabla 4.12. MSE obtenido de las pruebas con VS-MRAC-SAT-PI para fallas graduales. ..............................66 Tabla 4.13. Resumen de resultados obtenidos para fallas abruptas ................................................................67 Tabla 4.14. Resumen de resultados obtenidos para fallas graduales. .............................................................67. iv.
(10) ÍNDICE DE FIGURAS. Figura 1.1. Clasificación de métodos FTC basada en algorítmos de control. ................................................ 3 Figura 1.2. Estación de Control de Nivel..................................................................................................... 6 Figura 1.3. Diagrama del sistema de control de nivel de doble tanque. ......................................................... 7 Figura 1.4. Descripción de la señal de falla de tipo abrupto. ........................................................................ 8 Figura 1.5. Descripción de la señal de falla de tipo abrupto. ........................................................................ 8 Figura 1.6. Introducción de las señales de falla en el proceso. ...................................................................... 9 Figura 1.7. Tipos de fallas aplicadas en las pruabas. .................................................................................... 9 Figura 2.1. Esquema general del MRAC. ...................................................................................................15 Figura 2.2. Estructura del MRAC basado en la regla del MIT .....................................................................18 Figura 2.3. Estructura del MRAC basado en la teoría de Lyapunov. ...........................................................21 Figura 2.4. MRAC a partir de la regla del MIT con retroalimentación de la salida de la planta. ...................22 Figura 2.5. MRAC a partir de la teoría de Lyapunov con retroalimentación de la salida de la planta............22 Figura 2.6. Estructura del VS-MRAC-IO ...................................................................................................23 Figura 2.7. Diagrama de flujo de un Algotítmo Genético Básico. ...............................................................27 Figura 3.1. Prueba PRBS alrededor del 50% del nivel del tanque. ..............................................................28 Figura 3.2. Validación del modelo de la planta. ..........................................................................................29 Figura 3.3. Sistena de control MRAC-MIT para el proceso de nivel. ..........................................................31 Figura 3.4. Sistema de control MRAC-LYA para el proceso de nivel. ........................................................31 Figura 3.5. Sistema de control MRAC-MIT-PID para el proceso de nivel. ..................................................32 Figura 3.6. Sistema de control MRAC-LYA-PID para el proceso de nivel. .................................................33 Figura 3.7. Estructura del VS-MRAC ........................................................................................................36 Figura 3.8. Estructura del VS-MRAC-SAT ................................................................................................37 Figura 3.9. Estructura del VS-MRAC-SAT-PI ...........................................................................................38 Figura 4.1. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Abruptas. .....................................................41 Figura 4.2. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Abruptas....................................................42 Figura 4.3. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Abruptas..................................................42 Figura 4.4. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Graduales. ...................................................44 Figura 4.5. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Graduales. .................................................44 Figura 4.6. MRAC-MIT, , F. A.=10%, F. S.=5%, F. Graduales. ...............................................45 Figura 4.7. MRAC-MIT vs PID ideal, F. A.=10%, F. S.=5%, F. Abruptas. .................................................47 Figura 4.8. MRAC-LYA vs PID ideal, F. A.=10%, F. S.=5%, F. Abruptas. ................................................47 Figura 4.9. MRAC-MIT vs PID ideal, F. A.=10%, F. S.=5%, F. Graduales.................................................49 Figura 4.10. MRAC-LYA vs PID ideal, F. A.=10%, F. S.=5%, F. Graduales. ..............................................49 Figura 4.11. MRAC-MIT-PID, PID-FA10, F. A.=10%, F. S.=5%, F.Abruptas. ..........................................51 Figura 4.12. MRAC-MIT-PID, PID-FA30, F. A.=30%, F. S.=10%, F. Abruptas..........................................52 Figura 4.13. MRAC-MIT-PID, PID-FA10, F. A.=10%, F. S.=5%, F. Graduales. .........................................53 Figura 4.14. MRAC-MIT-PID, PID-FA30, F. A.=30%, F. S.=10%, F. Graduales. .......................................54 Figura 4.15. MRAC-LYA-PID, PID-FA10, F. A.=10%, F. S.=5%, F. Abruptas. ..........................................56 Figura 4.16. MRAC-LYA-PID, PID-FA30, F. A.=30%, F. S.=10%, F. Abruptas. ........................................56 Figura 4.17. MRAC-LYA-PID, PID-FA10, F.A.=10%, F.S.=5%, F. Graduales. ..........................................58 Figura 4.18. MRAC-LYA-PID, PID-FA30, F.A.=10%, F.S.=10%, F. Graduales. ........................................58 Figura 4.19. VS-MRAC, F.A.=10%, F.S.=5%, F. Abruptas ........................................................................60 Figura 4.20. VS-MRAC-SAT, F.A.=10%, F.S.=5%, F. Abruptas ...............................................................61. v.
(11) Figura 4.21. Figura 4.22. Figura 4.23. Figura 4.24. Figura 4.25.. VS-MRAC-SAT-PI, F.A.=10%, F.S.=5%, F. Abruptas...........................................................62 VS-MRAC-SAT-PI, F.A.=10%, F.S.=5%, F. Abruptas...........................................................63 VS-MRAC-SAT-PI, F.A.=30%, F.S.=10%, F. Abruptas .........................................................63 VS-MRAC-SAT-PI, F.A.=10%, F.S.=5%, F. Graduales ........................................................65 VS-MRAC-SAT-PI, F.A.=10%, F.S.=5%, F. Graduales ........................................................65. vi.
(12) TABLA DE SÍMBOLOS Y ABREVIATURAS. %MP AG e FCV FTC G(s) Gr(s) Kp LT LQI MIT MRAC MSE n PID PRBS TD TI ts u uC y yi ym yri θ1 θ2. Parámetro de Velocidad de Adaptación del MRAC (gamma) Porcentaje de sobreimpulso máximo Algoritmos Genéticos Señal del error Válvula de Control de Flujo Control Tolerante a Fallas Función de transferencia del modelo de la Planta Función de transferencia del modelo de referencia Constante proporcional del PID Transmisor de Nivel Cuadrático Lineal-Integral (Linear Quadratic-Integral) Massachusetts Institute of Technology Control Adaptivo por Modelo de Referencia (Model Reference Adaptive Controller) Error Cuadrático Promedio (Mean Square Error) Número total de datos para el cálculo del MSE Control Proporcional-Integral-Derivativo Secuencia Binaria Pseudoaleatoria (Pseudo Random Binary Sequence) Constante de tiempo derivativa del PID Constante de tiempo Integral del PID Tiempo de estabilización Señal de referencia del Controlador Señal de Control Señal de salida de la planta i-ésimo valor de la salida de la planta Señal de salida del modelo de referencia i-ésimo valor de la salida del modelo de referencia Ganancia de antealimentación adaptable Ganancia de retroalimentación adaptable. vii.
(13) RESUMEN Los procesos industriales modernos requieren de sistemas de control cada vez más precisos y confiables para alcanzar los altos índices de desempeño y seguridad necesarios para su operación. Si se considera que los sistemas de control convencionales se diseñan usualmente bajo la suposición de que los elementos del lazo de control no presentarán fallas en su funcionamiento, dichos sistemas pueden presentar un desempeño insatisfactorio o incluso volverse inestables cuando se presentan fallas en los actuadores, sensores u otros componentes del sistema. En sistemas donde el control y continuidad del proceso es crítico, tales como en sistemas de distribución de energía, procesos químicos, sistemas de transporte, etc. la falla de alguno de sus componentes puede generar pérdidas económicas por el paro de los procesos o en el peor de los casos puede ocasionar la pérdida de vidas humanas. Por esta razón es necesario desarrollar sistemas de control capaces de enfrentar fallas en los componentes del sistema manteniendo sus propiedades o degradándose de una forma segura. Los sistemas de control que se diseñan para tolerar fallas potenciales con el objetivo de mejorar su confiabilidad y disponibilidad mientras que mantienen un desempeño deseable son conocidos como sistemas de Control Tolerantes a Fallas [38]. En el presente trabajo de investigación se realiza una evaluación experimental de 7 diferentes esquemas de Control Tolerante a Fallas (FTC) basadas en Control Adaptivo por Modelo de Referencia (MRAC). Los esquemas que aquí se analizan son: MRAC a partir de la regla del MIT (MRAC-MIT), MRAC a partir de la teoría de Lyapunov (MRAC-LYA), MRAC-MIT combinado con PID (MRAC-MIT-PID), MRAC-LYA combinado con PID (MRAC-LYA-PID), MRAC de Estructura Variable (VS-MRAC), VS-MRAC con función saturación (VS-MRAC-SAT) y VSMRAC-SAT combinado con PI (VS-MRAC-SAT-PI). Los esquemas FTC basados en la regla del MIT y en la teoría de Lyapunov fueron propuestos originalmente por Vargas et al. [32]-[34]. La estructura general del controlador VS-MRAC fue tomada del trabajo de Hsu et al. [15][16][18]. Esta estructura fue modificada en el presente trabajo de investigación para mejorar la tolerancia a fallas agregando un controlador PI y sustituyendo las funciones signo de la estructura original por funciones saturación. A diferencia de los trabajos citados, donde los resultados surgen de simulaciones computacionales, la investigación que aquí se desarrolla tiene como objetivo implementar los esquemas mencionados en un proceso real, siendo ésta la principal contribución de la tesis. Especialmente, en el caso de los esquemas basados en el VS-MRAC el desempeño de éstos no había sido analizado anteriormente ante fallas en los componentes del sistema, ni en simulaciones ni de forma experimental. Otra de las contribuciones de esta tesis es la implementación y evaluación de modificaciones al esquema VSMRAC original con las cuales se mejora la tolerancia a fallas de dicho esquema. Estas modificaciones consisten en la sustitución de las funciones signo del esquema por funciones de saturación y la introducción de un controlador PI en la estructura original. Con estas modificaciones surge el esquema VS-MRAC-SAT-PI. Como sistema de pruebas se utiliza una estación de control de nivel de dos tanques interconectados. Los sistemas de control son probados ante fallas en el actuador (válvula de control neumática) y en viii.
(14) el sensor (transmisor de nivel), en cada caso se aplican tanto fallas abruptas como graduales. Las fallas en el actuador se producen sumando una señal de tipo escalón (fallas abruptas) o rampa (fallas graduales) a la señal de control antes de ser enviada a la válvula. De forma similar, las fallas en el sensor se generan al sumar una señal de tipo escalón o rampa a la señal recibida del transmisor de nivel. El desempeño de los esquemas se mide mediante el Error Cuadrático Promedio (MSE). De los esquemas de control que se implementaron, la mejor respuesta ante fallas en el actuador se obtuvo con el esquema VS-MRAC-SAT-PI, con el cual la tolerancia a este tipo de falla se mejoró con respecto a un controlador PID ideal hasta en un 98% para fallas de tipo abrupto y en un 99% para fallas de tipo gradual. De los esquemas propuestos por Vargas et al. [32]-[34], la mayor tolerancia ante fallas en el actuador se obtuvo con el esquema MRAC-MIT-PID, con el cual la tolerancia a este tipo de falla se mejoró con respecto a un controlador PID ideal en un 75% para fallas de tipo abrupto y en un 93% para fallas de tipo gradual. Por otro lado, con los esquemas de control basados en el MRAC que se evaluaron no se logró mejorar notablemente la tolerancia ante fallas en el sensor con respecto al desempeño que presenta el controlador PID ideal.. ix.
(15) 1. CAPÍTULO 1 INTRODUCCIÓN 1.1. Motivación y Generalidades.. En las últimas décadas, los avances en la teoría de control, junto con la gran capacidad de procesamiento que han alcanzado los sistemas de cómputo modernos han hecho posible la aplicación de sistemas de control automático en una gran variedad de procesos y sistemas tales como procesos químicos y de manufactura, sistemas de generación y distribución de energía, sistemas de transporte, etc. Actualmente, las actividades que han sido encargadas a los sistemas de control van desde las tareas más simples como la apertura de una válvula o el accionamiento de un interruptor hasta las más complejas como el control de reactores nucleares o navegación de aeronaves. El uso de los sistemas de control automático ha traído un gran número de ventajas a la forma en que se llevan a cabo los procesos, haciendo posible alcanzar niveles muy altos en cuanto a calidad y rapidez en la producción de bienes y servicios. Sin embargo, con el aumento en las aplicaciones de los sistemas de control también crece la dependencia en estos sistemas y como consecuencia aumenta la vulnerabilidad ante fallas que puedan ocurrir en el proceso que se está controlando o en el propio sistema de control. Se considera como falla a todo cambio en el comportamiento de alguno de los componentes del sistema (desviación no permitida de alguna de sus propiedades características) de manera que éste ya no puede satisfacer la función [6]. Además, considerando que en el diseño de sistemas de control convencionales generalmente se espera que los elementos del sistema funcionen dentro de límites preestablecidos, en el caso que uno de estos elementos llegue a presentar una falla, el sistema de control y por lo tanto el proceso, podrían presentar un comportamiento totalmente impredecible y peligroso. Las consecuencias de las fallas en los sistemas de control pueden ser desde una desviación en la calidad de los productos o un paro en las líneas de producción hasta ocasionar daños severos en los sistemas y equipos o incluso llegar a provocar la pérdida de vidas humanas. Por esta razón es necesario desarrollar sistemas de control que sean capaces de soportar fallas en los componentes del sistema, manteniendo sus propiedades o degradándose de una forma segura. Los sistemas de control que se diseñan para tolerar fallas potenciales con el objetivo de mejorar su confiabilidad y disponibilidad mientras que mantienen un desempeño deseable son conocidos como Sistemas de Control Tolerantes a Fallas (FTCS por sus siglas en inglés). De forma más precisa, los FTCS son aquellos sistemas de control que poseen la habilidad de ajustarse a fallas en los componentes de manera automática y son capaces de mantener la estabilidad general y un desempeño aceptable. En otras palabras, un sistema de control en lazo cerrado que puede tolerar un mal funcionamiento de los componentes mientras que mantiene el desempeño y propiedades de estabilidad deseadas se conoce como un sistema de control tolerante a fallas [38]. 1.
(16) El beneficio más importante del uso del control tolerante a fallas es que la planta continúa operando cuando se presenta una falla incluso si el proceso tiene cierta degradación en su desempeño, evitando de esta forma que la falla tenga consecuencias más serias. De acuerdo a [7] las principales ventajas de la implementación de los FTCS son: Disponibilidad de la planta y confiabilidad en el sistema sin importar la presencia de una falla. Prevenir que una simple falla se convierta en una falla del sistema completo. El uso de información en la detección de fallas en lugar de agregar más elementos físicos al sistema o proceso. El uso de reconfiguración de los componentes del sistema para acomodarse a la falla. Los FTCS admiten un desempeño degradado debido a la falla mientras que mantienen la disponibilidad del sistema. Los FTCS son baratos porque usualmente no se requiere de hardware nuevo. De forma general los FTCS pueden clasificarse como Pasivos (PFTCS) o Activos (AFTCS) de acuerdo a la metodología de diseño. En los métodos pasivos se hace uso de técnicas de control robusto para asegurar que la respuesta en lazo cerrado del sistema permanece insensible a ciertas fallas usando parámetros del controlador constantes y sin el uso de información de la falla en línea. La efectividad de los métodos pasivos depende de la robustez del sistema libre de fallas [28]. Este esquema no requiere del diagnóstico de la falla ni de la reconfiguración del controlador pero tiene una capacidad de tolerancia a fallas limitada [39]. Al contrario de los PFTCS, en los AFTCS el sistema de control se acomoda a la falla ya sea mediante la selección de una ley de control previamente establecida o mediante la síntesis de una nueva estrategia de control en [36]. De acuerdo a la clasificación basada en algoritmos de control presentada en [39] los métodos de diseño de FTCS forman parte de una o de la combinación de varias de las categorías que se presentan en la figura 1.1. En el presente trabajo de investigación se tratan métodos FTC basados en control adaptivo . En términos generales, un sistema de control adaptivo es aquel que mide un cierto índice de desempeño usando las entradas, los estados y las salidas del sistema ajustable. Mediante la comparación de los valores medidos del índice de desempeño contra un conjunto de valores determinados, el mecanismo de adaptación modifica los parámetros del sistema ajustable o genera una entrada auxiliar para mantener los valores del índice de desempeño cercanos al conjunto de valores determinados [21]. Los esquemas de control tolerante a fallas que se evalúan a lo largo de esta tesis están basados en un Control Adaptivo por Modelo de Referencia (MRAC por sus siglas en inglés). El MRAC es un tipo de control adaptivo en el cual la dinámica deseada se establece mediante un modelo de referencia, y los parámetros del controlador son ajustados basándose en el error, el cual es la diferencia entre la salida del sistema en lazo cerrado y el modelo de referencia [4].. 2.
(17) Clasificación de métodos FTC. . Control Cuadrático Lineal Control Pseudo-Inverso Control Inteligente Gain Scheduling / Parámetro Lineal Variable (LPV) Control Adaptivo Modelo Múltiple Asignación de Eigenestructura Linealización por retroalimentación/Inversión Dinámica H∞ Control Predictivo Teoría de retroalimentación Cuantitativa Estructura Variable/ Modo Deslizante Control por Modelo Interno Generalizado. Figura 1.1. Clasificación de métodos FTC basada en algorítmos de control.. 1.2. La Propuesta. 1.2.1 Definición del Problema En [32]-[34] se proponen una serie de esquemas FTC basados en un Control Adaptivo por Modelo de Referencia (MRAC). Estos esquemas surgen a partir de dos de los métodos básicos de diseño del MRAC: la regla del MIT1 y la teoría de Lyapunov. En los esquemas propuestos se combina el MRAC con técnicas de control clásico (PID), Control Inteligente (Algoritmos Genéticos, Redes Neuronales), y control robusto (H∞, Gain Scheduling) para generar nuevos esquemas con mayor tolerancia a fallas. Los nuevos esquemas se crean agregando uno o más controladores en las trayectorias del esquema MRAC original. En los trabajos citados, los esquemas de control que se proponen se diseñan para dos procesos diferentes: un intercambiador de calor industrial y un sistema de control de nivel de dos tanques acoplados. El diseño se realiza a partir de modelos obtenidos de una identificación previa de los sistemas. Posteriormente, el desempeño de los esquemas de control que se proponen se analiza mediante la simulación de estos en Simulink y Matlab. Los resultados que son presentados son. 1. La regla del MIT fue desarrollada en el Massachusetts Institute of Technology, de ahí que reciba este nombre.. 3.
(18) obtenidos de dichas simulaciones. En otras palabras, el alcance de estas investigaciones es desarrollar y analizar los esquemas que proponen en una simulación computacional sin llegar a implementar de forma real dichos esquemas. Por otro lado, en [15], [16] y [18] se propone un esquema de control VS-MRAC el cual presenta un buen desempeño en cuanto al seguimiento del modelo de referencia y robustez ante variaciones en los parámetros del modelo de la planta y dinámicas no modeladas [26]. En los trabajos que se citan los resultados surgen principalmente de simulaciones computacionales. Además en ninguno de ellos se analiza la tolerancia a fallas del esquema VS-MRAC. En general, las simulaciones computacionales son una herramienta de gran utilidad en el diseño de sistemas de control. Para que los resultados de una simulación sean considerados como válidos es necesario tener por principio un buen modelo del sistema que se representa. Sin embargo aún con un excelente modelo, siempre habrá factores que no se consideraron en la modelación que pueden ocasionar que los resultados obtenidos de una simulación no representen lo que sucederá con el sistema real o que solo sean válidos para ciertas condiciones muy específicas. Por esta razón, en el presente trabajo de investigación se propone ampliar la investigación desarrollada en los trabajos mencionados, aplicando los esquemas que ahí se exponen a un proceso real de control de nivel sujeto a factores propios de un sistema físico real tales como ruido, dinámicas no modelas, no linealidades, restricciones de los actuadores y sensores, etc.. 1.2.2 Objetivos En el trabajo de investigación que se desarrolla en esta tesis se tienen dos objetivos principales. El primero de ellos es evaluar de forma experimental la tolerancia a fallas, en actuadores y sensores, de los esquemas FTC basados en el MRAC propuestos por Vargas et al. [32]-[34]. El segundo objetivos es evaluar, también de forma experimental, la tolerancia a fallas del esquema VS-MRAC propuesto por Hsu et al. [15][16][18] y de dos variaciones de este esquema de control donde se sustituyen las funciones signo por funciones saturación y se agrega un controlador PI. . Los controladores que se implementan en el presente trabajo de investigación son: MRAC a partir de la regla del MIT (MRAC-MIT), MRAC a partir de la teoría de Lyapunov (MRAC-LYA), MRAC-MIT combinado con PID (MRAC-MIT-PID), MRAC-LYA combinado con PID (MRACLYA-PID), MRAC de Estructura Variable (VS-MRAC), VS-MRAC con función Saturación (VSMRAC-SAT) y VS-MRAC-SAT combinado con PI (VS-MRAC-SAT-PI). Como objetivos secundarios se tienen: Aplicar los esquemas de control antes mencionados en un sistema de control de nivel de dos tanques interconectados. Incrementar la tolerancia a fallas de los esquemas MRAC proponiendo modificaciones en la estructura de los esquemas originales. Analizar la tolerancia a fallas de los diferentes esquemas de control ante fallas en el actuador y en el sensor.. 4.
(19) Analizar la tolerancia a fallas de los diferentes esquemas de control ante fallas abruptas y graduales. Realizar una comparación de la tolerancia a fallas de los diferentes esquemas de control mencionados y compararlos contra un controlador PID ideal, que es el controlador más utilizado aplicaciones prácticas. Además, para poder cumplir con el objetivo primario y los objetivos secundarios es necesario realizar lo siguiente: Acondicionar la estación de control de nivel de doble tanque para hacer posible la implementación de los esquemas de control desde una PC. Realizar la programación de los sistemas de control en LabView y Matlab. Generar una Interfaz Hombre Máquina (HMI) que permitan la captura y modificación de los parámetros de los controladores y la visualización de las señales involucradas en el control.. 1.3. Contribución de la Tesis Se extendió el trabajo realizado por Vargas et al. [32]-[34] al evaluar de forma experimental los esquemas MRAC-MIT, MRAC-LYA, MRAC-MIT-PID y MRAC-LYA-PID que ahí se proponen. En los trabajos citados la evaluación de los esquemas se realiza mediante simulaciones computacionales mientras que en el presente trabajo de investigación la evaluación se realiza aplicando los sistemas de control en un proceso real. Evaluar de forma experimental la tolerancia a fallas del esquema VS-MRAC propuesto por Hsu et al [15][16][18] . En los trabajos de este y otros autores en los cuales se trata el VS-MRAC [10][12][15]-[19] no se analiza la tolerancia a fallas de dicho esquema de control. Además, en los trabajos citados la evaluación del desempeño se realiza mediante simulaciones computacionales. En [25] y [26] se evalúa el desempeño del VS-MRAC de forma experimental pero no se introducen fallas al sistema. Se realizaron modificaciones al esquema VS-MRAC propuesto por Hsu et al. [15][16][18] con las cuales se mejora la tolerancia a fallas de dicho esquema. Estas modificaciones consisten en sustituir las funciones signo del esquema por funciones de saturación e introducir un controlador PI en la estructura original. La posibilidad de agregar un controlador PI dentro del esquema VS-MRAC se menciona en [18], sin embargo esta estructura con el controlador PI no se analiza en el trabajo citado y menos aún se implementa en un sistema real como se realiza en el presente trabajo de investigación.. 5.
(20) 1.4. Alcances y Limitaciones. Esta tesis se limita a implementar y analizar algunos de los esquemas que se proponen en [32]-[34]. Los esquemas de estos trabajos que aquí se analizan son: MRAC-MIT, MRAC-LYA, MRAC-MIT-PID y MRAC-LYA-PID. Además de los esquemas de control anteriores se evalúa la tolerancia a fallas de tres esquemas de control basados en el VS-MRAC propuesto por Hsu et. al. [15][16][18]. Estos esquemas son: VS-MRAC y VS-MRAC-SAT y VS-MRAC-SAT-PI. La implementación y prueba de los esquemas mencionados se realiza en la estación de control de nivel de doble tanque descrita en la sección 1.5. La tolerancia a fallas se analiza para fallas en sensores y actuadores. Las fallas que se introducen en el sistema son tanto de tipo abrupto como gradual El desempeño de los sistemas de control se analiza alrededor de un punto de operación que es el 50% de la capacidad total de los tanques.. 1.5. Descripción del sistema de prueba.. En el diseño, implementación y prueba de los esquemas propuestos se utilizó un sistema de control de nivel que se encuentra en el área de graduados del laboratorio de mecatrónica del ITESM campus Monterrey.. Figura 1.2. Estación de Control de Nivel. 6.
(21) En la Figura 1.3 se muestra el diagrama del sistema de control de nivel. El sistema consiste en un par de tanques cilíndricos interconectados por la parte inferior, ambos tanques tienen una altura de 0.8 m y un diámetro de 0.15 m. Una válvula de control neumática (FCV) regula el flujo de agua que alimenta al tanque ―T-1‖, esta válvula es controlada por una señal en corriente de 4 a 20 mA. El nivel de agua es medido en el tanque ―T-2‖ mediante un transmisor de nivel (LT) el cual entrega una señal en corriente de 4 a 20 mA. La descarga de agua se encuentra en el taque ―T-1‖. Las señales del sensor y de control son adquiridas y generadas, respectivamente, mediante una tarjeta de adquisición de datos NI-PXI de National Instruments. Después de procesarse, la variable de control se mide en porcentaje de apertura de la válvula y la variable de proceso se mide en porcentaje de la capacidad del tanque. La implementación de los controladores se realiza mediante Matlab y LabView. El objetivo de control es regular el flujo de entrada de manera que el nivel de líquido en el tanque ―T-2‖ siga a una señal de referencia. El sistema de control deberá ser capaz de seguir dicha señal de referencia aun cuando se presentan fallas en el sensor de nivel y en la válvula de control o degradarse de forma aceptable.. PC/HMI. NI-PXI. FCV. V I. T-2. T-1. LT. Tanque de Recirculación. Bomba. Figura 1.3. Diagrama del sistema de control de nivel de doble tanque.. 7.
(22) 1.5.1 Descripción de las Fallas En el estudio de FTCS se ha tomado como un estándar la evaluación del desempeño de este tipo de sistemas ante fallas abruptas y graduales, multiplicativas y aditivas, de diferentes magnitudes y en diferentes componentes del sistema. Con esto se busca validar el desempeño de dichos esquemas ante un mayor rango de fallas que podrían llegar a presentarse en un sistema real. En el presente trabajo de investigación, los esquemas propuestos se prueban ante la ocurrencia de fallas tanto en el actuador como en el sensor. En ambos casos se generaron fallas de tipo abrupto y de tipo gradual. En todos los casos las fallas son de tipo aditivo. Las fallas abruptas en el actuador se generaron como un cambio repentino en la apertura de la válvula de control sumando una señal tipo escalón a la señal de control antes de que ésta sea enviada a la válvula de control.. Figura 1.4. Descripción de la señal de falla de tipo abrupto.. De forma similar, las fallas abruptas en el sensor se generaron sumando una señal tipo escalón a la señal proveniente del transmisor de nivel antes de que ésta sea leída por el sistema de control.. Figura 1.5. Descripción de la señal de falla de tipo abrupto.. En el siguiente diagrama se muestra la forma en que se introducen las señales de falla al proceso:. 8.
(23) Falla en Actuador. Falla en Sensor. +. uc +. +. + S. Planta. +. y S. Figura 1.6. Introducción de las señales de falla en el proceso.. Para especificar la magnitud de las fallas que se introducen al sistema se utiliza el porcentaje que esta representa con respecto al rango máximo del sensor o actuador. Por ejemplo, una falla del 10% en el actuador significa que éste sufre una apertura del 10% adicional a la apertura que tenía antes de ocurrir la falla. En el caso de las fallas en el sensor una falla de 5%, por ejemplo, significa que a la medición del nivel de agua sin falla se le agrega un 5% de la capacidad máxima del tanque. En las pruebas realizadas se utilizan fallas con magnitudes del 10 y 30% en el actuador y del 5% y 10% en el sensor. En el caso de las fallas graduales en sensor y actuador, se suma una señal tipo rampa que parte de cero y va aumentando en el tiempo hasta alcanzar el valor de falla máximo, tal como se muestra en la Figura 1.5. En todos los casos la señal que se suma va aumentando a razón de 0.5% del valor de falla final cada segundo, con lo que se alcanza el valor máximo de falla después de 200 segundos del inicio de la aplicación de la falla. Tanto las fallas en sensor como en actuador fueron generadas mediante software. Se utilizó esta forma de generar las fallas debido a que así se asegura la repetitividad de la condición de falla con lo que se facilita la comparación del desempeño de los diferentes esquemas de control.. F. en Actuador 10%, F. en Sensor 5% F. Abruptas F. en Actuador 30%, F. en Sensor 10%. Fallas Aplicadas. F. en Actuador 10%, F. en Sensor 5% F. Graduales F. en Actuador 30%, F. en Sensor 10%. Figura 1.7. Tipos de fallas aplicadas en las pruebas.. 9.
(24) 1.6. Organización de la Tesis. El presente trabajo de tesis se organiza de la siguiente manera: En el capítulo 1 se hace la introducción al tema de control tolerante a fallas. Además de explicar la importancia del estudio de los sistemas FTC, se presenta una clasificación de este tipo de sistemas para dar a conocer a que área de estudio pertenece la investigación que aquí se desarrolla. En este capítulo también se expone la motivación del tema de tesis que aquí se trata y se plantean los objetivos que se pretenden cumplir a lo largo de la investigación. En el capítulo 2 se expone la teoría que fundamenta el diseño y funcionamiento de los esquemas de control que se desarrollan. Se presenta la teoría del MRAC basado en la regla del MIT y en la teoría de Lyapunov. Además se presentan los conceptos básicos del funcionamiento de los algoritmos genéticos y se da una breve explicación de la estructura de un controlador PID. En el capítulo 3 se presentan los esquemas de control que se implementan en el sistema de control de nivel. Aquí se incluyen los detalles del diseño de dichos esquemas. El capítulo 4 contiene los resultados obtenidos de la implementación y prueba de los esquemas de control. En base a los resultados que se presentan se hace una comparación entre los diferentes esquemas de control. En el capítulo 5 se encuentran las conclusiones y trabajo futuro.. 1.7. Trabajos Relacionados. El antecedente directo de la investigación que se desarrolla a lo largo de esta tesis es el trabajo presentado en [32]-[34]. En estos trabajos se proponen diferentes esquemas FTC basados en Control Adaptivo, Control Inteligente, Control Robusto y sistemas LPV. En [32] se presentan dos de los esquemas FTC que se aplican en el presente trabajo de tesis. El primer esquema es el MRAC basado en la regla del MIT. En el segundo esquema se extiende el MRAC al incluir un controlador PID dentro de su estructura. Además de estos esquemas, en el trabajo mencionado se incluye un tercer esquema que no se aplica en esta tesis, en este esquema se combina el MRAC con una red neuronal. En el trabajo citado se utiliza como sistema de pruebas el modelo de intercambiador industrial. En [33] se proponen dos nuevos esquemas FTC basados en el MRAC. El primer esquema surge al incluir dentro de la estructura clásica del MRAC una red neuronal y un controlador PID sintonizado mediante algoritmos genéticos (MRAC-PID-NN). En el segundo esquema se combina el MRAC con un Controlador en Modo Deslizante (MRAC-SMC). Además de estos esquemas se analiza la tolerancia a fallas del MRAC basado en la regla del MIT. En el trabajo citado, los esquemas son probados con el modelo de un intercambiador industrial, generando resultados a partir de la simulación de estos esquemas. La sintonización de los controladores PID se realiza mediante algoritmos genéticos. 10.
(25) En [34] se propone un controlador MRAC para un sistema LPV (MRAC-LPV) y un MRAC con un controlador H∞ Gain Scheduling para un sistema LPV (MRAC- H∞ GS-LPV). Al igual que en esta tesis, como sistema de pruebas se utiliza un sistema de tanques acoplados y el desempeño de los esquemas se analizan ante fallas abruptas y graduales en el sensor y el actuador. También, los esquemas que ahí se proponen están basados en el MRAC a partir de la regla del MIT. Además de los trabajos mencionados anteriormente, existen otros que se relacionan indirectamente con la investigación que aquí se desarrolla en los cuales se utiliza el MRAC en problemas de FTC o se aplica algún método FTC en un sistema de control de nivel como el que aquí se utiliza. En el trabajo presentado por Abdullah & Zribi en [1] se desarrolla un sistema de control por modelo de referencia para un proceso de nivel de dos tanques acoplados. La principal diferencia del trabajo que aquí se desarrolla con el presentado en [1] es que en éste último el control por modelo de referencia no es adaptivo y además se desarrolla para un modelo LPV del proceso. El controlador se diseña resolviendo una serie de equaciones matriciales utilizando una descomposición por valores singulares para posteriormente obtener una ganancia de retroalimentación dependiente de los parámetros del modelo LPV. En la experimentación que se realiza en el trabajo citado no se evalúa el desempeño del sistema de control ante fallas de ningún tipo, solamente se analiza el seguimiento de la salida de la planta a la salida del modelo. Se reporta un seguimiento de ±8mm para un cambio en la referencia de 10 cm en el nivel del tanque. En [11] se presenta un método de diseño para un sistema FTC utilizando un controlador MRAC. Este método de diseño consiste en agregar un controlador MRAC a un sistema de control por ubicación de polos. El modelo de referencia en este esquema es la combinación en lazo cerrado de la planta y el controlador por ubicación de polos. La principal diferencia con el trabajo que aquí se realiza es que en el trabajo que se cita se utiliza el MRAC para extender la tolerancia a fallas del controlador por ubicación de polos mientras que en el presente trabajo de investigación se agrega un controlador PID para aumentar la tolerancia a fallas del esquema MRAC, además en el trabajo citado las leyes de adaptación del MRAC se diseñan como una función signo, no mediante la regla del MIT y la teoría de Lyapunov como aquí se hace. Jia y Jingping proponen en [20] un método de control MRAC basado en la combinación de un control PID y Algoritmos Genéticos. Al igual que en los esquemas MRAC combinados con PID que se desarrollan el presente trabajo de investigación, en el método propuesto por Jia y Jingping se utilizan Algoritmos Genéticos para encontrar los parámetros óptimos del PID. La principal diferencia es que en esta tesis los algoritmos genéticos se utilizan para sintonizar el PID fuera de línea con información obtenida del modelo del proceso mientras que en [20] la sintonización se realiza en línea. La experimentación presentada en el trabajo que se cita se realiza sólo a nivel simulación mediante un programa escrito en C++, utilizando el modelo de un reactor de tanque de mezclado continuo. En el trabajo realizado por Theilliol et al. en [31] se diseña un FTC para un sistema de tres tanques interconectados. El controlador está basado en un banco de observadores de entrada desconocida mediante el cual se hace el diagnóstico e identificación de la falla. Una vez que el sistema detecta la falla se agrega una ley de control adicional a la ley de control nominal. Tanto la ley de control nominal como la adicional se diseñan por retroalimentación de estados. La experimentación se realiza en un sistema de tres tanques real introduciendo fallas multiplicativas de tipo abrupto en una 11.
(26) de las bombas de agua del sistema. Las fallas se generan reduciendo la velocidad la bomba en un 20% y 50%. Con este esquema FTC observa una reducción el tiempo de respuesta y el sobreimpulso generado por la ocurrencia de las fallas en comparación con la ley de control nominal. En [24] se utiliza un sistema de tres tanques interconectados para probar el sistema FTC que ahí se propone, este está basado en un controlador LQI. El esquema propuesto realiza el diagnóstico de la falla mediante la comparación de las señales medidas con valores calculados a partir del modelo matemático del sistema. Una vez que se diagnostica la falla, el esquema FTC realiza un cambio en la señal de referencia para compensar la falla. En las pruebas que se presentan se introducen fallas abruptas, generándolas bloqueando de una de las bombas. Para analizar el desempeño ante las fallas, en el trabajo que se cita se utiliza un índice de calidad determinado por la suma del cuadrado del máximo error y del máximo valor de la señal de control. En las pruebas que se presentan, con el esquema FTC propuesto dicho índice de desempeño se ve reducido hasta en un 36% con respecto a un controlador LQI normal. En [9] se aplican tres diferentes controladores MRAC en un sistema de nivel de tres tanques. El primero es un MRAC cuyas leyes de adaptación se obtienen de una función signo. En los dos esquemas restantes se hace la estimación de los parámetros de la planta mediante un estimador basado en la teoría de Lyapunov y un estimador por mínimos cuadrados recursivos. La diferencia mas importante entre el trabajo desarrollado en [9] y el que se lleva a cabo en el presente trabajo de investigación es que en el trabajo citado el objetivo de los esquemas es la estimación en línea de los parámetros del modelo de la planta para lograr el seguimiento de una señal de referencia y en ningún momento se analiza el desempeño de estos esquemas ante fallas en el sistema. El esquema de control VS-MRAC que se evalúa en el presente trabajo de investigación fue propuesto originalmente por Hsu et al. a lo largo de una serie de publicaciones en donde presenta un método de diseño general para plantas de primer orden [15] o de orden mayor [16], un análisis detallado de la estabilidad [19] y un análisis de la robustez de dicho esquema ante dinámicas no modeladas y perturbaciones externas [12]. En todos los trabajos que se citan los resultados que se presentan surgen de simulaciones computacionales del sistema a partir de funciones de transferencia definidas por el autor, sin representar un sistema físico en específico. En ninguno de estos trabajos se analiza la tolerancia a fallas del esquema de control. El análisis de la robustez realizado en [12] se centra en dinámicas no modeladas, en variaciones en los parámetros de la función de transferencia utilizada en el diseño y en una perturbación constante que está presente desde el inicio de las simulaciones, en contraste con lo que se realiza en el presente trabajo de investigación donde las fallas se introducen en diferentes momentos de las pruebas y la magnitud de las fallas varía con el tiempo en las pruebas con fallas graduales. Son pocos los trabajos en donde se aplica el VS-MRAC propuesto por Hsu et al. a un sistema físico real. En [25] y [26] se diseña un controlador VS-MRAC para un motor DC y para el motor de un músculo artificial. En ambos casos se utiliza un modelo de segundo orden obtenido de una identificación previa. El esquema es probado de forma experimental con los motores reales. En el diseño del controlador VS-MRAC se utilizan funciones signo como funciones de conmutación. La principal diferencia con el presente trabajo de investigación es que en el trabajo que se cita no se introducen fallas al sistema y además no se utiliza un control PI dentro del esquema de control. 12.
(27) Se han publicado otros trabajos [10][30][35][37] en donde el objeto de investigación es un sistema de control VS-MRAC, sin embargo, éstos están basados en un método de diseño diferente al propuesto por Hsu. La diferencia radica en que a diferencia del método de Hsu, éste otro método necesita de una medición u observación del vector de estados completo mientras que en el método de Hsu sólo es necesario el conocimiento de las señales de entrada y salida del sistema.. 13.
(28) 2. CAPÍTULO 2 MARCO TEÓRICO Equation Chapter 2 Section 1. 2.1. Control Adaptivo por Modelo de Referencia (MRAC). La idea general tras el Control Adaptivo por Modelo de Referencia (MRAC) es crear un control en lazo cerrado con parámetros que pueden ser actualizados para cambiar la respuesta del sistema. Entre los diversos métodos de diseño de sistemas de control adaptivo, el MRAC es uno de los de mayor importancia ya que ése da origen a sistemas que son relativamente fáciles de implementar con velocidades de adaptación altas que pueden ser utilizados en una gran cantidad de aplicaciones [22]. El MRAC puede ser tratado como un sistema adaptivo en el cual el desempeño deseado es expresado en términos de un modelo de referencia. En el MRAC, los parámetros son actualizados en base al error, el cual es la diferencia entre la salida del sistema en lazo cerrado y la salida del modelo de referencia. En la Figura 2.1 se muestra un esquema general de un control MRAC tomado de [4]. El modelo de referencia determina la respuesta deseada del sistema ajustable, por ejemplo, especifica explícitamente un determinado índice de desempeño en términos de la entrada y la salida tanto del modelo como de la planta y el objetivo de la adaptación es minimizar una función de la diferencia entre las salidas de la planta y del modelo de referencia. Esto se logra mediante el mecanismo de adaptación que modifica los parámetros del sistema adaptivo [21]. Los sistemas adaptivos por modelo de referencia se comenzaron a estudiar a finales de los años 50. Desde entonces se ha publicado una gran cantidad de trabajos referentes a la teoría y aplicación de este tipo de sistemas. En [2] y [21] se presenta un panorama general de la teoría y aplicación de sistemas de control adaptivo. En [27] se hace una recopilación de los resultados relacionados con la robustez de los sistemas de control adaptivo más importantes obtenidos hasta la fecha.. 14.
(29) Figura 2.1. Esquema general del MRAC.. 2.1.1. MRAC Basado en la Regla del MIT.. Considerando el esquema general del M R A C en el cual el controlador tiene un parametro ajustable 9 y que el error esta dado por: (2.1) Una posibilidad es ajustar el parametro 9 de tal forma que la funcion de costo (2.2) se minimice. Lo anterior se logra cambiando el parametro en la direccion negativa del gradiente de J, esto es: (2.3) de. La ecuacion anterior es conocida como la Regla del MIT. L a derivada parcial — llamada la derivada de sensibilidad del sistema indica la forma en que el error es influenciado por el parametro. 15.
(30) ajustable. Si se asume que el cambio en el parametro es mas lento que otras variables en el sistema, entonces la derivada de sensibilidad puede ser evaluada asumiendo a 9 como constante [4]. El parametro de velocidad de actualizacion y. determina la rapidez con que los parametros de. adaptacion cambian para alcanzar los valores deseados, este parametro es determinado por el disenador. El diseno del M R A C basado en la regla del MIT se comienza definiendo el controlador: (2.4) Donde y es la salida de la planta y u es la senal de referencia del controlador. 91 y 92 son l parametros de adaptacion llamados ganancia de antealimentacion adaptable y ganancia retroalimentacion adaptable, respectivamente. Ahora, considerando una planta descrita por una funcion de transferencia de segundo orden con forma (2.5). y el modelo de referencia: (2.6). (2.7) tenemos que la salida de la planta es: (2.8). De las ecuaciones (2.4) y (2.8) se obtiene: (2.9). Si definimos la senal del error como (2.10) donde (2.11). Utilizando la ecuacion (2.9) se puede redefinir el error como:. 16.
(31) (2.12). Por lo tanto, las derivadas parciales del error con respecto a 91 y 92 se especifican como: (2.13). (2.14). Ahora, dado que el objetivo del M R A C es lograr que la dinamica en lazo cerrado del sistema sea igual a la del modelo de referencia es necesario hacer la siguiente aproximacion de la ecuacion caracteristica de la planta con la del modelo: (2.15) Con esta aproximacion las ecuaciones (2.13) y (2.14) se reescriben como:. (2.16). (2.17). Finalmente, utilizando la regla del MIT descrita por la ecuacion (2.3) las leyes de adaptacion resultan [33]:. (2.18). (2.19). Con estas leyes de adaptacion y el controlador definido en la ecuacion (2.4) la estructura del M R A C disenado a partir de la regla del MIT es [4]:. 17.
(32) Figura 2.2. Estructura del MRAC basado en la regla del MIT. En la figura anterior debe notarse la presencia de dos bloques integradores, estos son necesarios para obtener 9i y 9 de las ecuaciones (2.18) y (2.19). 2. 2.1.2. MRAC Basado en la Teoria de Lyapunov. En muchas ocasiones el diseno de un sistema M R A C trae consigo problemas de inestabilidad debido a su naturaleza no-lineal. Mas aun, la regla del MIT no garantiza la estabilidad del sistema de control en lazo cerrado. Por lo tanto, para lograr un diseno satisfactorio se hace necesario recurrir al analisis de estabilidad de Lyapunov. Antes de comenzar con el teorema de estabilidad de Lyapunov es necesaria la siguiente definicion [4]: Definition 3.1. Funcion positiva definida y semidefinida: Una funcion continua diferenciable n. n. V: R —R es llamadapositiva definida en la region U a R que contiene al origen si. 18.
(33) De forma similar, una funcion es llamada positiva semidefinida si la condition 2 es remplazada por V (x) > 0. E l teorema de estabilidad de Lyapunov establece lo siguiente: Si existe una funcion V: n. que sea definida positiva y su derivada (2.20). es negativa semidefinida, entonces la solution x(J=0 de (2.21) es estable. Si / es definida negativa la solucion sera asintoticamente estable. V denota a la funcion de Lyapunov para el sistema. Si: (2.22) entonces la solucion es globalmente asintoticamente estable.. El primer paso en el diseno del M R A C utilizando la teoria de Lyapunov es derivar una ecuacion diferencial del error que contenga el parametro de adaptacion. Despues es necesario establecer una funcion de Lyapunov y un mecanismo de adaptacion que reduzcan el error a cero [4]. L a derivada de la funcion de Lyapunov / usualmente es semidefinida negativa. E l modelo de referencia esta dado por (2.23) donde. y el modelo del proceso esta dado por (2.24). De esta forma el controlador es (2.25) Y el error se calcula a partir de e=y- y. (2.26). La ecuacion diferencial del error esta dado por (2.27). 19.
(34) Y la derivada del error sera cero si lo parametros de adaptacion son: (2.28). (2.29) Para llevar a los parametros de adaptacion al valor deseado asumiendo que siguiente funcion cuadratica. , se establece la. (2.30). El resultado de la ecuacion anterior es cero cuando el error es cero y los parametros del controlador son iguales a los valores deseados. L a derivada de la ecuacion (2.30) es (2.31). (2.32). Si los parametros de adaptacion son actualizados como (2.33). (2.34) entonces (2.35) dt La derivada de V es semidefinida negativa. Lo anterior implica que parametros de adaptacion. y. y que el error y los. estan limitados. Finalmente (2.36). Aun cuando el error converja a cero, los parametros de adaptacion no necesariamente convergeran al valor deseado debido a que lo anterior solo demuestra que ambos parametros de adaptacion estan limitados. Aun asi, se asegura la estabilidad del sistema [4]. Utilizando las leyes de adaptacion (2.33) y (2.34) el controlador M R A C basado en la teoria de Lyapunov tiene la siguiente estructura [4]:. 20.
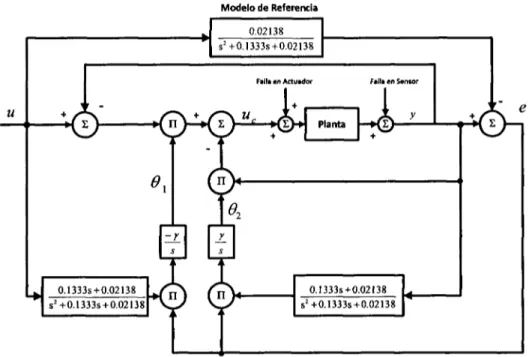
(35) Figura 2.3. Estructura del MRAC basado en la teoria de Lyapunov.. 2.2 MRAC con retroalimentacion de la salida en la trayectoria de antealimentacion. En el trabajo presentado en [32]-[34] los esquemas de control que se proponen estan basados en la teoria del M R A C expuesta en la section 2.1, sin embargo en estos trabajos la estructura original se modifica incluyendo un lazo que toma la serial de la salida de la planta y la sustrae de la serial de referencia antes de ser multiplicada por 0 . Esta modification se realiza tanto en los esquemas que 1. surgen a partir del M R A C basado en la regla del M I T como en el M R A C basado en la teoria de Lyapunov. Con este cambio, el controlador toma la siguiente forma: (2.37) Con estas modificaciones la estructura del M R A C basado en la regla del MIT es la siguiente [32][34]:. 21.
(36) Figura 2.4. MRAC a partir de la regla del MIT con retroalimentacion de la salida de la planta.. De forma similar, el M R A C basado en la teoria de Lyapunov tiene la siguiente estructura [32]-[ 34]:. M o d e l o de Referenda. Figura 2.5. MRAC a partir de la teoria de Lyapunov con retroalimentacion de la salida de la planta. 22.
(37) Los esquemas presentados en las dos figuras anteriores son los que se utilizaran a lo largo del trabajo que se desarrolla y se presenta en este documento. En el capitulo 5 se lleva a cabo una serie de pruebas donde se compara el desempeno de los esquemas M R A C originales contra el desempeno de los esquemas M R A C con retroalimentacion de la senal de salida de la planta. Con estas pruebas se justifica de manera experimental el uso de estos esquemas.. 2.3. MRAC de Estructura Variable (VS-MRAC). La idea original tras el esquema M R A C de Estructura Variable (VS-MRAC) esta basada en el uso de funciones de commutation dentro de la estructura del controlador. Una dificultad de este esquema ha sido la necesidad de la medicion o conocimiento del vector de estados del sistema. A principios de la decada de los 90s Hsu propuso un esquema V S - M R A C [15] el cual utiliza unicamente las mediciones de las senales de salida y de entrada al sistema con lo cual ya no es necesaria la medicion u observation de los estados, a esta nueva estructura se le dio el nombre de VS-MRAC-IO. Para un sistema de segundo orden un sistema de control V S - M R A C - I O tiene la estructura que se muestra en la Figura 2.6.. Figura 2.6. Estructura del VS-MRAC-IO. En el esquema V S - M R A C - I O el error esta definido como: (2.38). 23.
(38) y el error aumentado esta dado por: (2.39) donde (2.40) En la ecuacion anterior M es la funcion de transferencia del modelo de referencia. Para un sistema de segundo orden esta tiene la siguiente forma: (2.41). La funcion de transferencia M(s) no es estrictamente positiva real dado que su grado relativo es 2. Para solucionar esta situacion se introduce el polinomio de primer grado L(s) de forma tal que al multiplicarlo M(s) por L(s) se forma una funcion de transferencia Estrictamente Positiva Real. De esta forma se define: (2.42) En la ecuacion anterior, el coeficiente a! se toma del denominador de la funcion de transferencia de la planta, descrita por la ecuacion (2.5) Ahora, definiendo el error auxiliar (2.43) En la ecuaciones (2.40) y (2.43), u° y u son las leyes de adaptacion para el sistema de segundo 1. orden. Estas leyes de adaptacion son: (2.44) (2.45) donde. (2.46). De esta forma, la senal de control del sistema se forma como: (2.47) - 1. En la ecuacion (2.43) F representa a un filtro pasa bajas que tiene como objetivo suavizar la senal de control. Para un sistema de segundo orden, F se selecciona como: - 1. 24.
(39) (2.48). Los coeficientes k y k de las leyes de adaptacion se seleccionan de forma tal que se satisfaga la condicion de deslizamiento [16]: 0. (2.49) En [26] se propone un metodo para determinar de forma practica los coeficientes k y k para el caso particular de sistemas de segundo orden. En este metodo dichos coeficientes se calculan usando la condition de deslizamiento en el estado estable (S =0 y S =0). E l coeficiente k se selecciona satisfaciendo las siguientes relaciones: 0. 0. 1. (2.50) (2.51) De esta forma, conociendo u. cmax. yu. cmin. del sistema para el cual se hace el diseno del controlador y. la variation de la senal de referencia se puede determinar el coeficiente k mediante las ecuaciones (2.50) y (2.51). Cuando se ha alcanzado el estado estable (y =y ) las superficies S y S convergen a cero. E l coeficiente k puede ser determinado entonces utilizando S o S . A partir de S se tiene que S0=yp-ym-ya, entonces ya converge a cero y utilizando la ecuacion (2.40) se obtiene la siguiente relacion: p. 0. 2.4. m. 0. 0. 1. 1. 0. Control PID.. El controlador PID es la forma mas comun de control retroalimentado. Mas del 95% de los lazos de control son del tipo PID. Los controladores PID se encuentran en todas las areas donde el control es utilizado. El controlador PID ideal, que se utiliza a lo largo de esta tesis, tiene la siguiente ecuacion de salida en el dominio del tiempo (2.53). Donde uc es la variable de control y e es el error. L a variable de control es el resultado de la suma de tres terminos: un termino proporcional al error (P), un termino proporcional a la integral del error (I), y un termino proporcional a la derivada del error (D). Los parametros del controlador son: la 25.
(40) ganancia proporcional. K P , la constante de tiempo integral Ti y la constante de tiempo derivativa. [3].. 2.5. Algoritmos Genéticos. Los Algoritmos Genéticos (AG) son técnicas de optimización basadas en la simulación de los fenómenos que se llevan a cabo en la evolución de las especies adaptándolos a un problema de optimización. Estas técnicas implican la aplicación de leyes de selección natural en una población para encontrar a los individuos que están mejor preparados para su entorno [14]. Los AG´s comienzan con una población inicial de individuos, la cual puede ser generada aleatoriamente o a partir de un conocimiento específico. Cada individuo, comúnmente conocido como cromosoma, consiste de una estructura de datos y representa una posible solución en el espació de búsqueda del problema. Los AG´s evolucionan en nuevas generaciones de individuos utilizando la información obtenida de generaciones pasadas mediante los mecanismos de selección, cruza y mutación de cromosomas. El principal objetivo de estos mecanismos es seleccionar a los mejores cromosomas de cada generación y transmitir sus características a la siguiente generación [23]. Un AG es un proceso iterativo que hace que la población evolucione. En términos generales, cada iteración consiste en los siguientes pasos: Selección: El primer paso consiste en seleccionar cromosomas para su reproducción. Esta selección se realiza de forma aleatoria con una probabilidad que depende de la aptitud (que tan óptima es) de los cromosomas, así los mejores cromosomas son seleccionados para reproducción. Reproducción: En el segundo paso, se generan nuevos cromosomas a partir de los cromosomas seleccionados. Para la generación de estos nuevos cromosomas el algoritmo puede utilizar recombinación o mutación Evaluación: En este paso se evalúa la correspondencia de los nuevos cromosomas con la solución y son comparados contra los cromosomas viejos. Reemplazo: Durante este último paso los cromosomas de la población anterior son descartados y reemplazados por los mejores nuevos cromosomas. De esta forma se puede definir la estructura de un AG básico [29]: 1. [Inicio ] Generación aleatoria de una población de n cromosomas (posibles soluciones al problema). 2. [Aptitud] Evaluar la aptitud de cada cromosoma en la población. 3. [Nueva población] Crear una nueva población repitiendo los siguientes pasos hasta que la población se complete: 3.1. [Selección] Seleccionar dos cromosomas padres de la población anterior de acuerdo a su aptitud (entre mejor sea el cromosoma, más probable es que sea seleccionado). 26.
(41) 3.2. [Cruza] Con una probabilidad de cruza, combinar los cromosomas padres para generar nuevos cromosomas (hijos). Si no se lleva a cabo la cruza, los hijos son una copia exacta de los padres. [Mutación] Con una probabilidad de mutación, mutar a los cromosomas hijos en cada posición dentro del cromosoma. 3.3. [Aceptación] Ubicar a los nuevos cromosomas en la población. 4. [Reemplazo] Utilizar la nueva población generada para las siguientes iteraciones del algoritmo. 5. [Iterar] Ir al paso 2 para evaluación de la aptitud de la nueva población. En la Figura 2.7 se muestra el diagrama de flujo del AG básico.. Inicio. Crear población inicial aleatoria. Evaluar aptitud de la población Mantener a los mejores cromosomas Formar parejas de cromosomas Crear nueva población mediante la cruza. Solución optima encontrada? Fin Reproducir e ignorar poblaciones Realizar mutaciones. Figura 2.7. Diagrama de flujo de un Algotítmo Genético Básico.. 27.
(42) CAPÍTULO 3 E S Q U E M A S DE C O N T R O L. 3.1. Identificación del Modelo de la Planta. Para obtener un modelo del sistema de tanques interconectados descrito en el capítulo 1 se realizó una prueba PRBS alrededor de punto de operación que se utilizará en todas las pruebas (50% del nivel del tanque). Los resultados de la prueba PRBS se muestran en la siguiente figura.. Figura 3.1. Prueba PRBS alrededor del 50% del nivel del tanque.. A partir de los resultados de la prueba PRBS y con la ayuda del módulo de identificación de sistemas de Matlab se obtuvo el siguiente modelo continuo de segundo orden con tiempo muerto:. (3.1) Para validar el modelo obtenido, se muestra en la siguiente figura la comparación entre las señales obtenidas al aplicar la misma entrada al modelo ya la estación de nivel.. 28.
Figure




+7





Documento similar
En este ensayo de 24 semanas, las exacerbaciones del asma (definidas por el aumento temporal de la dosis administrada de corticosteroide oral durante un mínimo de 3 días) se
En un estudio clínico en niños y adolescentes de 10-24 años de edad con diabetes mellitus tipo 2, 39 pacientes fueron aleatorizados a dapagliflozina 10 mg y 33 a placebo,
• Descripción de los riesgos importantes de enfermedad pulmonar intersticial/neumonitis asociados al uso de trastuzumab deruxtecán. • Descripción de los principales signos
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
[r]
SVP, EXECUTIVE CREATIVE DIRECTOR JACK MORTON
Social Media, Email Marketing, Workflows, Smart CTA’s, Video Marketing. Blog, Social Media, SEO, SEM, Mobile Marketing,
