Control de torque para motor BLDC de vehículo eléctrico impulsado por ultracapacitores
136
0
0
Texto completo
(2) PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE ESCUELA DE INGENIERIA. CONTROL DE TORQUE PARA MOTOR BLDC DE VEHICULO ELECTRICO IMPULSADO POR ULTRACAPACITORES. MAXIMILIANO MURA JORNET. Tesis presentada a la Comisión integrada por los profesores:. JUAN DIXON ROJAS DAVID WATTS CASIMIS MICAH ORTUZAR DWORSKY YADRAN FRANCISCO ETEROVIC SOLANO. Para completar las exigencias del grado de Magister en Ciencias de la Ingeniería. Santiago de Chile, Diciembre, 2009.
(3) A todos y cada uno de los miembros de mi familia, por su apoyo y compresión en todo momento. En particular a Sofía y Claudia, quienes con su amor me dieron las fuerzas para completar este trabajo. ii.
(4) AGRADECIMIENTOS Quisiera agradecer en primer lugar a mis padres, por su apoyo constante y esfuerzo incondicional, los que me permitieron completar con éxito mi educación profesional. Agradezco también a mi profesor guía durante estos dos años de investigación, don Juan Dixon Rojas, por su invaluable ayuda a lo largo de todo mi trabajo, por su inmensa sabiduría, y por sobretodo su sencillez y calidad humana. Quisiera agradecer además, la ayuda, el apoyo y la compañía de todo el equipo de trabajo del Laboratorio: Sebastián Bosch, Javier Pereda, y en especial a Carlos Castillo, quien construyó el inversor que utilicé para mi investigación; entendiendo que el trabajo aquí presentado es fruto no sólo de mi esfuerzo sino de un trabajo en equipo. Sin duda no hubiese sido lo mismo sin ellos. Agradezco también a Eduardo Cea, quién siempre estuvo dispuesto a ayudarme y alegrarnos con su especial sentido del humor. Por último, pero no menos importante, agradezco a Dios, quien crea las oportunidades y entrega día a día las fuerzas para llevarlas a cabo.. iii.
(5) INDICE GENERAL Pág. DEDICATORIA........................................................................................................... ii AGRADECIMIENTOS .............................................................................................. iii INDICE DE TABLAS ............................................................................................... vii INDICE DE FIGURAS ............................................................................................. viii RESUMEN ................................................................................................................... x ABSTRACT ................................................................................................................ xi 1.. Introducción ........................................................................................................ 1 1.1. Los Ultracapacitores ................................................................................... 3 1.2. Objetivos .................................................................................................... 6. 2.. Características del motor síncrono BLDC .......................................................... 7 2.1 Comparación con otro tipo de motores eléctricos ...................................... 7 2.1.1 Motores de corriente continua (DC) ................................................ 7 2.1.2 Motores de inducción ....................................................................... 7 2.1.3 Motores síncronos PMSM ............................................................... 8 2.1.4 Motores de reluctancia ..................................................................... 8 2.1.5 Motores síncronos BLDC ................................................................ 9 2.2 Construcción y principios de operación ................................................... 10 2.2.1 El estator ........................................................................................ 10 2.2.2 El rotor ........................................................................................... 12 2.2.3 Sensor de efecto Hall ..................................................................... 13 2.2.4 Teoría de operación ....................................................................... 16 iv.
(6) 2.3 Características de torque y potencia ......................................................... 20 2.4 Descripción del motor a utilizar ............................................................... 22 3.. Desarrollo del proyecto ..................................................................................... 25 3.1 Descripción del vehículo .......................................................................... 25 3.2 Descripción del inversor........................................................................... 27 3.3 Técnica de control a utilizar ..................................................................... 30 3.3.1 Banda de histéresis ......................................................................... 31 3.3.2 Banda de histéresis multinivel ....................................................... 33 3.3.3 Técnica de control con banda multinivel ....................................... 35 3.3.4 Balance de voltajes entre ultracapacitores ..................................... 38 3.4 Simulaciones ............................................................................................ 43. 4.. Implementación práctica ................................................................................... 48 4.1 Características generales del microprocesador a utilizar ......................... 48 4.2 Esquema de control .................................................................................. 48 4.3 Módulos físicos del controlador ............................................................... 50 4.4 Banco de pruebas ..................................................................................... 53 4.5 Sistemas de seguridad y detección de fallas ............................................. 54. 5.. Resultados y Discusión ..................................................................................... 58 5.1 Análisis sobre el control de corrientes ..................................................... 58 5.2 Análisis del control de voltajes ................................................................ 62 5.3 Análisis del sistema de frenado regenerativo ........................................... 66. 6.. Conclusiones y trabajo futuro ........................................................................... 70. BIBLIOGRAFÍA ........................................................................................................ 73. v.
(7) ANEXOS .................................................................................................................... 77 ANEXO A: Esquema de pines del microprocesador ................................................. 78 ANEXO B: Tarjetas del controlador .......................................................................... 79 ANEXO C: Datasheet sensor de corriente ................................................................. 88 ANEXO D: Datasheet sensor de voltaje .................................................................... 91 ANEXO E: Datasheet conversores DC/DC ............................................................... 93 ANEXO F: Código fuente del microprocesador. Archivo main.cl ............................ 95 ANEXO G: Código fuente del microprocesador. Archivo config.h ........................ 115 ANEXO H: Código fuente del microprocesador. Archivo disparos.h ..................... 116 ANEXO I: Código fuente del microprocesador. Archivo extras.h .......................... 118 ANEXO J: Frecuencia en control de banda de histéresis (h) ................................... 119 ANEXO K: Códigos de error del controlador .......................................................... 123 ANEXO L: Construcción del inversor ..................................................................... 124. vi.
(8) INDICE DE TABLAS Tabla 1-1: Cuadro comparativo de elementos de almacenamiento energético ..................... 3 Tabla 2-1: Cuadro comparativo de motores ........................................................................ 10 Tabla 2-2: Voltaje según velocidad angular del rotor ......................................................... 22 Tabla 2-3: Relación entre torque y corriente de armadura .................................................. 23 Tabla 2-4: Resumen de características ................................................................................ 23 Tabla 3-1: Ficha técnica ...................................................................................................... 25 Tabla 3-2: Rangos de control y posibles operaciones. ........................................................ 35 Tabla 3-3: Combinaciones para generar un nivel de voltaje en terminales ........................ 41. vii.
(9) INDICE DE FIGURAS Figura 1-1: Esquema de condensador y ultracapacitor ......................................................... 4 Figura 1-2: Ultracapacitor Maxwell, módulo de 48V y 165F ............................................... 5 Figura 2-1: Estator de máquina BLDC ............................................................................... 11 Figura 2-2: Fuerza contra-electromotriz trapezoidal ........................................................... 11 Figura 2-3: Fuerza contra-electromotriz sinusoidal ............................................................ 12 Figura 2-4: Distintas topologías de rotor con imanes permanentes .................................... 13 Figura 2-5: Sección transversal de motor BLDC ................................................................ 14 Figura 2-6: Sensor de efecto Hall, ejemplo para rotor de un par de polos .......................... 15 Figura 2-7: Campo magnético de estator ............................................................................ 17 Figura 2-8: Movimiento del rotor en sentido horario .......................................................... 19 Figura 2-9: Formas de onda de voltaje y corriente ideales operando como motor ............. 20 Figura 2-10: Característica de torque del motor BLDC ...................................................... 22 Figura 3-1: Fotografía del automóvil .................................................................................. 26 Figura 3-2: Montaje de ultracapacitores en vehículo .......................................................... 26 Figura 3-3: Esquema de puente H ....................................................................................... 27 Figura 3-4: Operación de puente H ..................................................................................... 28 Figura 3-5: Esquema completo del inversor multinivel ...................................................... 28 Figura 3-6: Puente IGBT usado en construcción del inversor ............................................ 29 Figura 3-7: Inversor de 9 niveles construido ....................................................................... 29 Figura 3-8: Diagrama de flujo de control por histéresis...................................................... 31 Figura 3-9: Corriente controlada por banda de histéresis ................................................... 32 Figura 3-10: Corriente controlada por múltiples bandas de histéresis ................................ 34 Figura 3-11: Esquema de conexión para corriente entre las fases A y B ............................ 35 Figura 3-12: Corriente IAB controlada y correspondiente variación del voltaje del inversor ............................................................................................................................................. 37 Figura 3-13: Diagrama de flujo para elección de banda ..................................................... 38 Figura 3-14: a) aumentado corriente de motor b) disminuyendo corriente......................... 40 viii.
(10) Figura 3-15: Ejemplo de operación para en nivel +2 (a) y nivel -2 (b)............................... 42 Figura 3-16: Diagrama de flujo del control de voltajes ...................................................... 43 Figura 3-17: Modelo completo del sistema ......................................................................... 44 Figura 3-18: Detalle del motor BLDC ................................................................................ 45 Figura 3-19: Detalle controlador ......................................................................................... 46 Figura 3-20: Detalle de la topología del inversor ................................................................ 47 Figura 4-1: Esquema del software de control...................................................................... 50 Figura 4-2: Tarjeta principal ............................................................................................... 51 Figura 4-3: Tarjeta de disparo para señales ópticas ............................................................ 52 Figura 4-4: Tarjeta para conexión de los sensores .............................................................. 53 Figura 4-5: fotografía del banco de pruebas........................................................................ 54 Figura 4-6: Diagrama de flujo del chequeo de sensores ..................................................... 56 Figura 4-7: Diagrama de conexión y diagrama de flujo del control de cortocircuito ......... 57 Figura 5-1: Simulación de corrientes de armadura ............................................................. 59 Figura 5-2: Oscilograma de las corrientes de armadura ...................................................... 60 Figura 5-3: Corriente de referencia (rojo) y torque de la máquina (amarillo) .................... 60 Figura 5-4: Oscilograma detalle de corriente en una línea.................................................. 61 Figura 5-5: Detalle de rizado de corriente ........................................................................... 62 Figura 5-6: voltaje fase-fase del motor ............................................................................... 63 Figura 5-7: Corriente de línea (amarillo) y voltaje fase-fase (verde) .................................. 64 Figura 5-8: Comportamiento de módulos con voltajes similares ........................................ 65 Figura 5-9: Comportamiento de módulos con voltajes diferentes ...................................... 66 Figura 5-10: Esquema de pedal de control del vehículo ..................................................... 67 Figura 5-11: Flujo del control de voltaje en regeneración .................................................. 68 Figura 5-12: Forma de corriente en regeneración (controlada)........................................... 69 Figura 5-13: Forma de corriente en regeneración (no controlada)...................................... 69. ix.
(11) RESUMEN. En este trabajo se presenta el análisis, diseño e implementación de un control de torque para un motor síncrono tipo Brushless DC (BLDC) de 5 kW de potencia, con el objeto de ser utilizado en un vehículo eléctrico. El inversor a utilizar es de 9 niveles, construyéndose con 2 puentes H en cascada por fase y utilizando como única fuente de energía un módulo ultracapacitor de 48 Vdc por cada puente. A diferencia de los vehículos eléctricos convencionales que existen hoy en día, los cuales usan como fuente primaria de almacenamiento energético baterías de distintos tipos, el vehículo en el cual se implementará el controlador tendrá una capacidad de potencia mucho más elevada; permitiendo cargar el vehículo en el transcurso de segundos o minutos, dependiendo de la capacidad del cargador. Por otro lado, como los ultracapacitores actuales disponen de una baja densidad energética, la eficiencia del sistema de tracción y la capacidad de frenado regenerativo son puntos importantes en la implementación. La estrategia de control utilizada en este trabajo fue el control de corriente por medio de múltiples bandas de histéresis, el cual fue primero probado en simulaciones utilizando MATLAB/Simulink.. El vehículo dispondrá en total de aproximadamente 280 Wh de energía, lo que le permitirá tener una autonomía cercana a 3 km., demostrando así que en cuanto los ultracapacitores basados en nanotubos de carbono salgan al mercado (con 20 o 30 veces más capacidad de almacenamiento que los utilizados en esta investigación), será perfectamente viable construir vehículos eléctricos que permitan su uso en ciudad, tengan un tiempo de carga muy reducido y no requieran ser cambiados en toda su vida útil.. Palabras Claves: Vehículos eléctricos, Ultracapacitores, banda de histéresis, control de torque x.
(12) ABSTRACT This work presents the analysis, design and implementation of a torque control for a synchronous Brushless DC motor type (BLDC) of 5 kW of power, in order to be used in an electric vehicle. The inverter is using 9 levels, built with 2 cascaded H-bridge stages and using a single energy source of 48 Vdc ultracapacitor module for each bridge. Unlike conventional electric vehicles that exist today, which use a primary source of energy storage batteries of different types, the vehicle in which control will be implemented, will have a much higher power capacity, allowing the vehicle to be recharged in the course of seconds or minutes, depending on the charger capacity. However, as the current ultracapacitors have a low energy density, the efficiency of drive system and regenerative braking are important points in the implementation. The control strategy used in this work was the current control through multiple hysteresis bands, which was first tested in simulation using MATLAB / Simulink.. The vehicle has a total of approximately 280 Wh energy, allowing it to have an autonomy close to 3km., demonstrating that once the ultracapacitors based on carbon nanotubes are in the market (with 20 or 30 times more storage capacity than the used in this research), it will be perfectly feasible to build electric vehicles that allow their use in town, have a very short recharge time and do not require to change its batteries throughout its life time.. Keywords: electric vehicles, supercapacitors, ultracapacitor, hysteresis band control, torque control xi.
(13) 1. 1.. INTRODUCCIÓN. Aunque para muchos pudiera parecer que los vehículos eléctricos son una invención reciente y que lleva pocos años de desarrollo, ciertamente la historia dista bastante de ser así; de hecho los vehículos eléctricos en sus comienzos competían codo a codo con sus rivales de combustión interna y fueron producidos de manera comercial durante 20 años (Hughes, 1996), hasta que la ventajas comparativas de los vehículos a combustión frenaron la creación de los propulsados con energía eléctrica. No fue hasta la crisis de petróleo de los años 70, en que se volvió a pensar nuevamente en la creación de vehículos eléctricos debido no sólo a la escasez de petróleo sino también a la contaminación ambiental que produce la combustión de hidrocarburos (D'Agostino, 1993). Las ventajas que tenían los vehículos a combustión sobre los eléctricos en un comienzo, siguen siendo básicamente las mismas (Sulzberger, 2004). La gran densidad energética de la gasolina permite que los automóviles tengan una autonomía mucho mayor que la que se logra con cualquier tipo de baterías y el tiempo de carga de combustible toma algunos minutos en lugar las 6 u 8 horas que toma la carga de los vehículos eléctricos que se ven hoy en el mercado. Según lo expuesto anteriormente, es claro que el centro de atención para el desarrollo de más y mejores vehículos eléctricos debe ser la forma de almacenamiento de la energía. Durante muchos años se ha experimentado con diferentes tipos de baterías, con hidrógeno, y en el último tiempo han surgido con mucha fuerza los vehículos híbridos (Chan, 2007)(Chang & Wong, 2004). Sin embargo existe otra tecnología bastante poco explorada hasta el momento y que podría cambiar drásticamente, en el transcurso de pocos años más, las prestaciones de los vehículos eléctricos (Schneuwly, Maher, & Auer, 2004). La tecnología de almacenamiento antes mencionada son los Ultracapacitores y el tema central de esta tesis es justamente la implementación de un.
(14) 2. vehículo propulsado únicamente con esta fuente de energía, como prototipo experimental y base para los futuros desarrollos de estos elementos. Al margen de los beneficios del vehículo eléctrico como tal, es importante tener en cuenta que detrás de un cambio tan drástico como la masificación de los vehículos utilizando esta tecnología, existe un necesario cambio de paradigma del modo en que concebimos la red eléctrica. Para el sistema eléctrico, sin duda no dejaría de ser relevante que miles de usuarios se conectaran a la red y decidieran cargar su vehículo eléctrico por ejemplo, ya que una carga completa de éste puede significar alrededor de 10kWh de energía, la cual puede ser suministrada en un espacio de tiempo muy pequeño (con la tecnología de los ultracapacitores) o más largo, según se desee. La capacidad de la red eléctrica es limitada, además se alimenta con distintas fuentes energéticas y a un distinto precio según la demanda existente en el sistema, lo que implica una gran complejidad a la hora de operarla, sobre todo ante acciones no absolutamente predecibles como la necesidad de un usuario por cargar su automóvil. Si bien lo anterior puede sonar como un gran problema, por medio de las denominadas “redes inteligentes” o “smart grids” (Farhangi, 2010) (Brown, 2008), podría convertirse en una gran oportunidad. Las redes inteligentes no son otra cosa que las mismas redes de abastecimiento energético actuales, pero dotadas de decisiones y acciones que no dependen del sistema global sino de pequeñas porciones del mismo. Con esta herramienta, los vehículos eléctricos podrían convertirse en un actor relevante en la red eléctrica, ahora no sólo como consumidores, sino también como generadores de apoyo en una mini red que ve sobrepasada su capacidad en algún momento o bien estima que le es menos costoso comprar esa energía localmente que distribuirla desde una central. En este nuevo paradigma, existirían más y mejores oportunidades para el usuario de un vehículo eléctrico, ayudando a rentabilizar su inversión y la del país en estas tecnologías..
(15) 3. 1.1. Los Ultracapacitores El condensador electroquímico de doble capa (ECDL), más conocido como ultracapacitor, es en su definición más básica, un capacitor o condensador con una capacidad de almacenar energía mucho más alta que lo normal, en general del orden de diez a veinte veces la capacidad de un condensador electrolítico común (0,2 Wh/Kg). Ellos permiten tener del orden de 2 a 5 Wh/kg de capacidad de almacenamiento. Si pensamos que las baterías comunes de Plomo-ácido tienen una energía específica promedio de 30 Wh/kg (ver Tabla 1-1), nos podemos dar cuenta de la gran importancia que tienen estos dispositivos en el ámbito del almacenamiento energético, pues en su estado de desarrollo actual ya se pueden comparar con las baterías mencionadas. Un ultracapacitor almacena energía electrostáticamente polarizando una solución electrolítica y aunque es un dispositivo electroquímico, a diferencia de cualquier batería, no hay reacciones químicas que intervengan en su mecanismo de almacenamiento de energía. Por esto último, este mecanismo es altamente reversible, lo que permite al ultracapacitor a ser cargado y descargado centenares de miles o incluso millones de veces (Maxwell Inc., 2009). Tabla 1-1: Cuadro comparativo de elementos de almacenamiento energético. Equipo. Batería Pb-Ácido Batería Li-ión Ultracapacitor Maxwell. Densidad de Densidad de energía Vida útil [Ciclos] potencia [W/Kg] [Wh/Kg] 30 120 4. 150 250 3.200. 700 1.200 1.000.000. Al estar formado por dos capas porosas de carbón activado, permite que al aplicarle potencial entre las placas, la placa positiva atraiga a los iones negativos.
(16) 4. en el electrolito, mientras que el potencial de la placa negativa atrae a los iones positivos. Esto crea dos capas de almacenamiento capacitivo, a diferencia de un condensador electrolítico común.. Figura 1-1: Esquema de condensador y ultracapacitor La forma de lograr la gran capacidad de los ultracapacitores para almacenar energía, se debe a la estructura porosa de sus electrodos basados en carbono activado, lo que permiten multiplicar varias veces el área de las capas que los componen para un mismo volumen (Figura 1-1); de esta manera se puede lograr áreas de 2000m2/g, lo que hasta hace poco tiempo parecía imposible. Además de esto, debido a que la capacidad (C) de un condensador es proporcional al área de las placas (A) e inversamente proporcional a la distancia de separación entre las mismas (d) (como se aprecia en la Eq. 1-1 1-1), la extremadamente pequeña distancia de separación que se logra en los ultracapacitores, hacen posible logran altos valores de energía específica. Eq. 1-1. Aunque en el mercado existen diversos modelos de ultracapacitores, por costos, tamaño y capacidad, se eligieron 6 módulos ultracapacitores de 48V y 165F.
(17) 5. (Figura 1-2), del fabricante norteamericano Maxwell, los que tuvieron un costo aproximado de US$2.250 cada uno.. Figura 1-2: Ultracapacitor Maxwell, módulo de 48V y 165F De esta manera, según la fórmula para calcular la energía almacenada en un condensador (Eq. 1-2), cada módulo almacena 52,8Wh; lo que hace un total de 316,8Wh almacenados en el vehículo. Sin embargo, por limitaciones del fabricante los módulos no serán completamente descargados, sino que mantendrán una tensión mínima de 16V, de manera que la energía total utilizable disminuye a 281,6Wh.. Eq. 1-2. Los ultracapacitores prometen convertirse en poco tiempo en fuentes de almacenamiento energético altamente competitivas con el resto de las tecnologías actuales. De hecho en la actualidad ya existen prototipos con energías específicas varias veces mayores a las de los módulos utilizadas en este proyecto (Bakhoum,.
(18) 6. 2009), (Weir & Nelson, 2008), (Schindall, 2007); pero no son aún productos disponibles para la venta al público.. 1.2. Objetivos El objetivo principal de esta tesis y del proyecto en el cual se enmarca la misma, es el desarrollo de un vehículo eléctrico que utilice ultracapacitores como única fuente energética para tracción. La razón por la cual se hace necesario investigar acerca de los ultracapacitores como fuente primaria o única de energía para vehículos, se debe a que estos dispositivos presentan una serie de ventajas frente a las baterías convencionales, dentro de las cuales podemos resaltar: el reducido tiempo de carga (del orden de minutos o incluso segundos), la extensa vida útil (cerca de un millón de ciclos), una muy alta eficiencia (supera el 98%), la no necesidad de mantenimiento, y que su estado de carga pueda ser determinado directamente con el voltaje (Maxwell Inc., 2009). En tanto el objetivo específico de este trabajo, es la realización de un controlador que sea capaz de manejar el sistema de tracción del vehículo, utilizando el acelerador del mismo como una referencia de torque (tal como en los vehículos convencionales), tanto para la aceleración como para el frenado regenerativo. Como objetivo particular del controlador, se busca que el torque de la máquina BLDC (motor de tracción a utilizar), sea lo más plano posible, ya que esto implica un manejo más cómodo y una mayor eficiencia energética. Finalmente se espera que el control sea capaz de manejar el sistema de carga y descarga de los ultracapacitores, de manera de mantener el mismo voltaje en todos los módulos y utilizar así el máximo de la energía disponible en ellos..
(19) 7. 2.. CARACTERÍSTICAS DEL MOTOR SÍNCRONO BLDC. En este capítulo se describe el motor síncrono BLDC, el cual fue utilizado para el desarrollo del vehículo que trata esta tesis. Lo aquí expuesto no pretende ser una fuente detallada de información respecto a este tipo de motores, sino más bien un resumen de sus principales características de funcionamiento, con el objeto de poder comprender mejor las características del controlador. 2.1. Comparación con otro tipo de motores eléctricos. A continuación veremos un resumen de las características de los motores eléctricos utilizados actualmente en tracción (Hashemnia & Asaei, 2008). 2.1.1 Motores de corriente continua (DC) Si bien los motores de continua fueron los primeros motores utilizados para la tracción y hubo mucho interés en ellos debido a la simplicidad que significa controlar su torque, su construcción con anillos y escobillas acarrea problemas de mantenimiento. Por esta razón al surgir nuevos métodos de control para las máquinas de corriente alterna, el interés en desarrollar aplicaciones con este tipo de motores bajo considerablemente. De todas formas el motor DC sigue siendo un buen candidato para aplicaciones de baja potencia, ya que en la actualidad se fabrican con poderosos imanes permanentes lo que los hace más eficientes y confiables. El estándar para este tipo de motores es alcanzar eficiencias de alrededor de un 80%, contando con una potencia específica de 0,3 kW/kg. 2.1.2 Motores de inducción Los motores de inducción han sido muy utilizados en diversos tipos de aplicaciones industriales y estos se debe a sus características de confiabilidad,.
(20) 8. robustez, bajo mantenimiento, y capacidad de trabajar en entornos hostiles. Por otro lado, la tecnología de los motores de inducción es la más madura entre los motores de corriente alterna. Esta máquina tiene una muy buena eficiencia (alrededor del 90%), es en extremo robusta y de muy bajo costo comparativo. Además de contar con una potencia específica bastante competitiva (alrededor de 0,6 kW/kg). Sólo en la última década se ha visto superada por la mejor eficiencia y bajo peso de las máquinas síncronas de imanes permanentes 2.1.3 Motores síncronos PMSM Los motores síncronos de imanes permanentes son sin duda el competidor más serio para los motores de inducción en aplicaciones de tracción. En efecto, varias empresas (ej. Toyota, Honda, Nissan) ya producen vehículos con este tipo de motores, pues tienen ventajas muy significativas, como son: alta potencia específica (1kW/kg), mayor eficiencia (95%) y mejor disipación del calor hacia el medio ambiente. El punto débil de esta tecnología es su elevado costo en relación a su competidor más cercano, el motor de inducción, que hacen preferible muchas veces este último pese a las ventajas del primero. 2.1.4 Motores de reluctancia Los motores de reluctancia han recibido mucha atención para su aplicación en vehículos, debido a sus ventajas constructivas. Ellos son de implementación muy simple y muy resistente. Además son bastante similares en prestaciones con respecto a los motores de inducción (eficiencia cercana a 91% y potencia específica de 0,7 kW/kg). El motor sin embargo presenta serias desventajas como: operación ruidosa, alto rizado en el torque, requiere de una topología especial en el inversor, y produce alta interferencia electromagnética..
(21) 9. 2.1.5 Motores síncronos BLDC Estos motores se pueden considerar como un caso particular de los motores síncronos de imanes permanentes, siendo su diferencia que los motores BLDC se alimentan con ondas rectangulares de corrientes en contraste con los motores PMSM que son alimentados con ondas sinusoidales. Se podría decir también que son el resultado de invertir el estator y el rotor de un motor DC, ya que los imanes se encuentran en el rotor y el colector es emulado alternando la corriente de armadura de la máquina, eliminando de esta forma todo tipo de escobillas y anillos. Las principales ventajas en relación al PMSM son: tamaño más compacto (1,2kW/kg), eficiencia levemente superior, detección de la posición del rotor más sencilla y construcción un poco menos complicada. Además, a diferencia de los motores PMSM, el control es bastante más sencillo de implementar ya que no es necesario generar ondas sinusoidales en las corrientes de alimentación, en este sentido son parecidos a los motores DC, pero mucho más eficientes (alrededor de 95%). En la Tabla 2-1 2-1, podemos ver un cuadro comparativo en el que se midió (Hashemnia & Asaei, 2008), con un puntaje de 1 a 5, cada característica de los distintos tipos de motores..
(22) 10. Tabla 2-1: Cuadro comparativo de motores. Tipos de Motor Características. DC. Inducción. PMSM. Densidad de Potencia Eficiencia Controlabilidad Confiabilidad Madurez de la tecnología. 2,5 2,5 5 3 5. 3,5 3,5 5 5 5. 5 5 4 4 4. 3,5 3,5 3 5 4. Costo. 4 22. 5 27. 3 25. 4 23. Puntaje Total. 2.2. Reluctancia BLDC 5 5 5 4 4 3 26. Construcción y principios de operación. Como se mencionó anteriormente, los motores BLDC son una clase particular de motor síncrono. Esto quiere decir que, como cualquier motor síncrono, el campo magnético del rotor no es inducido por el campo magnético del estator, como lo haría en un motor común de inducción, y por ende no existe deslizamiento entre ambos campos (giran a la misma velocidad angular). Si bien existen motores BLDC con distinto número fases, el motor usado en este proyecto fue un motor trifásico, por ende cualquier explicación o figura hace referencia a este tipo de motores únicamente. 2.2.1 El estator En un motor BLDC, el estator está compuesto de cabezas polares formadas de fierro laminado, en donde son puestos los embobinados (Figura 2-1). Aunque a simple vista pareciera la configuración del estator de una máquina de inducción cualquiera, la diferencia la hace la distribución que tienen los enrollados. La mayoría de las máquinas BLDC se componen de 3 enrollados conectados en.
(23) 11. estrella, cada uno compuesto por un grupo de bobinas conectadas entre sí; formando así un número par de polos en el estator.. Figura 2-1: Estator de máquina BLDC Existen 2 tipos de embobinados para los motores síncronos, que producen dos variantes: motores trapezoidales (BLDC) o motores sinusoidales. La diferencia entre ellos está dada por la interconexión interna que se produce al formar las fases con las distintas bobinas; lo que produce una fuerza contra-electromotriz o voltaje inducido distinto entre los terminales del motor (Figura 2-2 y Figura 2-3).. Figura 2-2: Fuerza contra-electromotriz trapezoidal.
(24) 12. Figura 2-3: Fuerza contra-electromotriz sinusoidal Cada tipo de motor, al tener distinto tipo de voltaje, también tiene distinto tipo de corriente. Los motores sinusoidales requieren de corriente de alimentación sinusoidales y los motores BLDC requieren de corrientes rectangulares (idealmente), para su correcta operación. De esta manera, los motores sinusoidales poseen una característica de torque más suaves que los motores BLDC, aunque su construcción es más compleja por la distribución de las bobinas del estator y también lo es su control, ya que es necesario generar ondas de corrientes sinusoidales con bajo contenido armónico para su correcta operación (Yedamale, 2003). 2.2.2 El rotor El rotor de un motor BLDC está construido con imanes permanentes, los cuales pueden generar desde uno a un par de decenas de pares de polos. Según los requerimientos de densidad de flujo magnético de la máquina, los imanes del rotor pueden ser de diversos tipos. Si bien los imanes de ferrita han sido muy utilizados para estos efectos, los nuevos descubrimientos de imanes de tierras raras han.
(25) 13. ganado terreno en este campo; ya que estos imanes poseen una densidad magnética bastante mayor y son más livianos para un mismo volumen que los imanes de ferrita (Yedamale, 2003). Actualmente la aleación más usada en motores de imanes permanentes es la de Neodimio-Fierro-Boro. Cualquiera sea el tipo de imán a utilizar, los rotores son construidos alternando los polos norte (N) y sur (S) (Figura 2-4), completando una cantidad par de polos y en directa relación con el número de pares de polos del estator de la misma máquina.. Figura 2-4: Distintas topologías de rotor con imanes permanentes 2.2.3 Sensor de efecto Hall Como se mencionó anteriormente, a diferencia de los motores DC, la conmutación de los motores BLDC no se realiza con un colector con escobillas, sino que se controla electrónicamente. Debido a esto, es necesario conocer la posición del rotor para saber en qué secuencia se deben energizar las bobinas del estator. En la mayoría de los motores BLDC, se usan 3 sensores de efecto Hall; los cuales se ubican en el mismo eje del motor, del lado que no se usa. Cada vez que los polos magnéticos del rotor pasan cerca de un sensor de efecto Hall, estos entregan una señal digital (high o low), indicando si por ahí está pasando un polo N o S. Según la combinación de las señales de estos 3 sensores, se puede saber exactamente la posición del rotor (con una precisión angular que.
(26) 14. depende del número de polos); lo que nos permite determinar de manera precisa la secuencia de conmutación que se debe seguir. Como los sensores de efecto Hall necesitan estar en la parte estacionaria del motor y perfectamente alineados con los polos del rotor, en la mayoría de los casos se realiza una réplica magnética a escala de los polos de rotor exclusivamente para su uso en el sensor Hall (Figura 2-5).. Figura 2-5: Sección transversal de motor BLDC Los sensores de efecto Hall utilizados en las máquinas BLDC, se ubican en la mayoría de los casos a 120° eléctricos de desfase entre ellos y tienen un segmento circular de un tercio del segmento ocupado por cada polo. Como sabemos, si el número de pares de polos es mayor que uno, los grados eléctricos y geométricos no coincidirán, por lo que claramente su posición espacial dependerá directamente del número de pares de polos del motor. En la Figura 2-6 se puede ver como ejemplo un rotor con un par de polos, con 3 sensores de efecto Hall a 120° de desfase entre ellos. Si la cercanía del polo norte (N) implica que el sensor de efecto Hall entrega la señal high (1 lógico) y por el contrario la presencia del polo sur (S) tiene como salida la señal low (0 lógico); podemos ver como la combinación de señales de salida (Ha:Hb:Hc), nos permiten detectar la posición angular con precisión de 60° geométricos. Es decir, tendremos 6 posiciones conocidas para el rotor..
(27) 15. Ha. Hc. Hb. Hc. Ha:Hb:Hc=001 à 120°. Ha. N S. 180°. Hc. Hc Hb. Hb. N S. 240° Ha:Hb:Hc=011 à 180°. Ha:Hb:Hc=010 à 240°. N S. Ha. Ha. Hb. Hc Hb. Ha:Hb:Hc=101 à 60°. Ha:Hb:Hc=100 à 0°. 120°. N S. Hb. N S. Ha. Ha. N S. 0°. 60°. Hc. 300° Ha:Hb:Hc=110 à 300°. Figura 2-6: Sensor de efecto Hall, ejemplo para rotor de un par de polos Es sencillo notar que el ángulo mínimo para precisar la posición del rotor siempre será de 60° eléctricos. Como los pares de polos tienen que siempre completar los 360° de la circunferencia completa, la relación entre grados eléctricos y geométricos se establece como: Eq. 2-1 De esta manera entre más pares de polos tenga el motor, más precisa será al información de posición del rotor y por ende el controlador puede hacer un control de torque más preciso..
(28) 16. 2.2.4 Teoría de operación Debido a que los sensores de efecto Hall permiten la determinación del rotor en sectores circulares de 60°, necesariamente tenemos 6 etapas distintas para una rotación de 360° del mismo; a esto se le llama conmutación de seis pasos (six-step commutation). La conmutación en seis pasos, es el resultado del hecho de que no disponemos de información acerca de la posición angular del rotor durante los 60° en que el motor permanece en un sector circular específico (al menos no con el sensor Hall); al desconocer la información, lo óptimo es efectuar una sola acción para cada uno de los 6 sectores circulares. Como el rotor es de imanes permanentes, es el campo del estator el que hay que ir variando para lograr un movimiento circular en el eje. Por cada sector en que se encuentre el rotor, se debe generar un vector de campo magnético con cierto ángulo y cierta magnitud para que controlar el sentido de giro y torque de la máquina. Como se mencionó anteriormente, para la conmutación se usarán 6 vectores de campo magnético, los que permanecerán constantes durante 60° eléctricos (y geométricos para el caso base con un par de polos). Estos vectores se forman de las combinaciones producidas al introducir corriente plana por una de las fases y sacarla por otra, dejando la tercera sin alimentar. En la Figura 2-7 podemos ver qué dirección toma el vector de campo magnético del estator al alimentar diferentes bobinas. Por ejemplo, al introducir corriente por la fase A y sacarla por la fase B (A→B); el vector del campo que se genera como resultado de la suma vectorial de los campos generados por cada bobina, apunta en dirección de los 300° (según las coordenadas de la misma figura)..
(29) 17. 90°. A. 60°. 90° 120°. 30°. 150°. 180°. 0°. B. 210°. 330°. C. 150°. 180°. 0°. B. 210°. 330°. C 240°. 300°. 270°. 270°. Aà B 90°. 120°. 30°. 240°. 300°. Aà C. A. 60°. 90° 120°. 30°. 180°. 0°. B. 210°. 330°. C. 120°. 30°. 150°. 180°. 0°. B. 210°. 330°. C. 240°. 300°. 240°. 300°. 270°. 270°. Bà C. Bà A. A. 60°. 90° 120°. 30°. 180°. 0°. B. 210°. 330°. C 240°. 120°. 30°. 150°. 180°. 0°. B. 210°. 330°. C 240°. 300°. 270°. Cà A. A. 60°. 150°. 300°. A. 60°. 150°. 90°. A. 60°. 270°. Cà B. Figura 2-7: Campo magnético de estator.
(30) 18. Según la teoría básica de las máquinas síncronas, el torque que tiene la máquina es proporcional al ángulo (δ) que se forma entre el vector de campo magnético del rotor y el vector de campo del estator; esto quiere decir que el torque alcanza un máximo cuando ambos vectores se encuentran a una distancia de 90°. De las figuras anteriores, podemos apreciar que sólo se detectan posiciones en ángulos múltiplos de 60° y a la vez podemos aplicar vectores de campo en las mismos seis puntos. Esto quiere decir, en términos prácticos, que los valores más cercanos a los que podemos poner los vectores de campo (al comienzo de cada ciclo de conmutación) son 60° y 120°. Es por esto que el motor BLDC no es cualquier máquina síncrona, sino que está especialmente construida para evitar la variación de torque, a lo largo de los 60° eléctricos que dura cada ciclo de su operación. De esta forma, en lugar experimentar una variación entre 120° y 60° al atravesar un polo, el ángulo del vector se mantiene constante en la posición intermedia, es decir 90°. Para que esta operación efectivamente resulte, a diferencia de una máquina síncrona sinusoidal, el motor BLDC debe alimentarse con corrientes planas. De esta forma, el torque de la máquina podrá ser tan plano como las corrientes que lo producen. Dependiendo la señal digital entregada por el conjunto de los sensores de efecto Hall y del sentido de giro que quiera dársele al rotor, quedará determinado que vector de campo de estator debe aplicarse y mantenerse hasta el próximo cambio en la señal del sensor de posición..
(31) 19. A. 90° 60°. 90° 120°. 120°. Ha. Ha. 30°. 30°. N S. 150°. 0° Hb. B. 180°. 150°. N S. 0° Hb. Hc. 330°. A. 60°. 210°. B 330°. 180°. Hc. C. C. 240°. 300°. 240°. 300°. 270°. 270°. Ha:Hb:Hc=010 Bà A. Ha:Hb:Hc=110 Bà C. A. 90° 60°. 90°. 120° Ha. 180°. 150°. 0° Hb. B. Hc. 330°. 210°. N S. Hb. 30°. 150°. N S. 0°. A. 60°. 120° Ha. 30°. B. 180°. Hc. 330°. 210°. C. C. 240°. 300°. 240°. 300°. 270°. 270°. Ha:Hb:Hc=100 Aà C. Ha:Hb:Hc=101 Aà B. A. 90° 60°. 90° 120°. 120° Ha. N S. Hb. B. 180°. 150°. 0° Hb. Hc. 330°. 30°. 150°. 210°. N S. 0°. A. 60°. Ha. 30°. B. 180°. Hc. 330°. C 240°. 300°. 210°. 210°. C 240°. 300°. 270°. 270°. Ha:Hb:Hc=001 Cà B. Ha:Hb:Hc=101 Cà A. Figura 2-8: Movimiento del rotor en sentido horario.
(32) 20. 2.3. Características de torque y potencia. Según lo mencionado hasta ahora, podemos resumir el comportamiento ideal de las corrientes y tensiones de la máquina BLDC como se ve en la Figura 2-9. En línea continua se muestra la corriente que pasa por cada bobina y en línea discontinua se observa la tensión inducida en las bobinas por efecto de la variación del flujo electromagnético por ellas.. eA + IA. 0 -. eB. + IB. 0 -. eC + IC. 0 0°. 60°. 120°. 180°. 240°. 300°. 360°. Figura 2-9: Formas de onda de voltaje y corriente ideales operando como motor Se puede observar claramente que en cada ciclo de 60° eléctricos, sólo se encuentran 2 de las 3 fases conduciendo; en donde por una de las fases está entrando la corriente y por la otra saliendo. De esta manera la potencia eléctrica en el primero ciclo (0 a 60 grados) puede ser calculada como: Eq. 2-2.
(33) 21. Resultado que se puede generalizar sabiendo que la magnitud del voltaje inducido en cada bobina tiene la misma magnitud (e) y lo mismo en el caso de las corrientes, en que se considera Imax como el máximo valor de la corriente por cualquiera de las fases; de manera que la ecuación general para el cálculo de la potencia del motor sería: Eq. 2-3 Conociendo la relación entre torque y potencia, podemos determinar: Eq. 2-4 La relación entre la tensión inducida en cada bobina (e) y la velocidad angular (ω), resulta ser lineal debido a que la densidad de flujo magnético es una constante determinada por el rotor y el número de vueltas de cada enrollado por bobina es también constante. Eq. 2-5 El resultado de la ecuación anterior, nos indica que el torque de la máquina BLDC es directamente controlado por la magnitud de las corrientes rectangulares de estator, en donde interviene una constante de proporcionalidad (kΦ) la cual es una característica de construcción de la máquina la cual debe ser especificada por el fabricante u obtenida experimentalmente. Al igual que el motor de inducción, los motores de síncronos y en particular el motor BLDC, pueden operar variando su torque desde cero hasta el torque nominal girando a cualquier velocidad (dentro de su rango nominal) usando un inversor. Como toda máquina eléctrica sin embargo, tanto el torque como la velocidad nominal se pueden extender bajo ciertas circunstancias, dando lugar a una extensión de la curva característica de torque (ver Figura 2-10)..
(34) 22. Figura 2-10: Característica de torque del motor BLDC 2.4. Descripción del motor a utilizar. El motor BLDC utilizado es un motor de procedencia China, del cual sólo se especificaron la potencia nominal y el número de polos, por lo que el resto de la información fue obtenida por medio de pruebas experimentales. Primero se midió la constante de proporcionalidad dada por la relación entre el voltaje fase-fase y la velocidad angular del rotor, datos que se muestran en la tabla a continuación. Tabla 2-2: Voltaje según velocidad angular del rotor. Velocidad [rpm]. Voltaje fase-fase [Vrms]. Relación [Vrms/rpm]. 50 100 150 250 350 400. 0,90 1,53 2,29 3,80 5,40 6,16. 0,018 0,015 0,015 0,015 0,015 0,015.
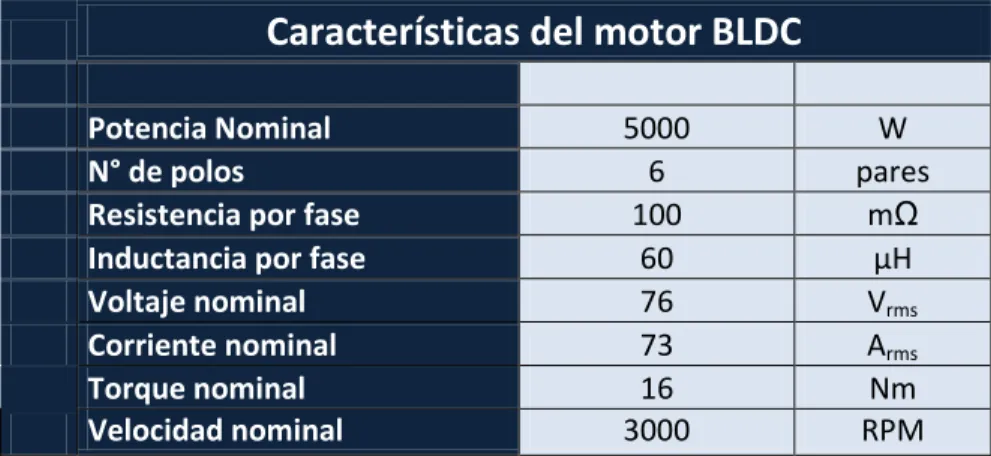
(35) 23. 450 500. 6,92 7,69. 0,015 0,015. La siguiente medición que se realizó fue de la constante de proporcionalidad que relaciona la magnitud de las corrientes rectangulares de armadura con el torque del motor (Tabla 2-3). Esta medición es muy importante, ya que nos indica la capacidad del motor para propulsar el automóvil. Tabla 2-3: Relación entre torque y corriente de armadura. Corriente [Arms] Torque medido [Nm] Relación [Nm/A] 8,0 16,4 19,2 24,0. 1,4 3,6 4,2 5,25. 0,18 0,21 0,22 0,22. Se determinó además que el sensor de efecto Hall, como la mayoría de los sensores de este tipo, se alimenta con 5V y las señales de salida son de colector abierto, por lo que es necesario poner resistencias pull-ups para su correcta operación. Habiendo realizado todas estas pruebas, se llegó al siguiente resumen de características: Tabla 2-4: Resumen de características. Características del motor BLDC Potencia Nominal N° de polos Resistencia por fase Inductancia por fase Voltaje nominal Corriente nominal Torque nominal Velocidad nominal. 5000 6 100 60 76 73 16 3000. W pares mΩ µH Vrms Arms Nm RPM.
(36) 24.
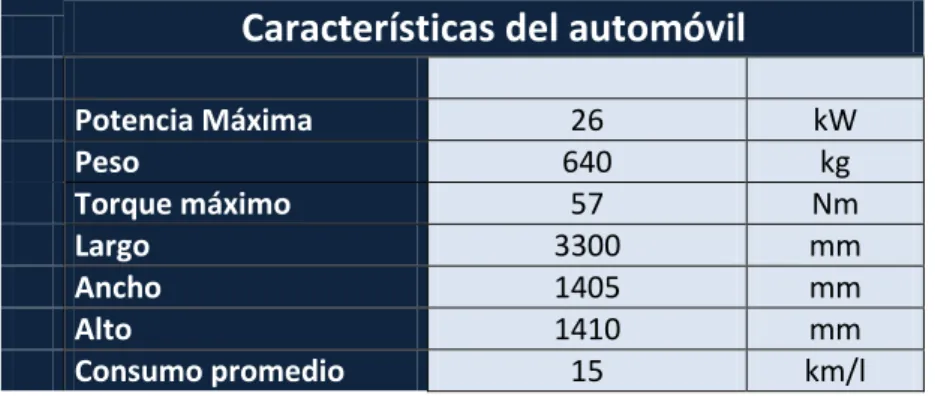
(37) 25. 3.. DESARROLLO DEL PROYECTO. En el presente capítulo se revisará en detalle las características del proyecto, así como el marco teórico en el cual se desarrolla el mismo. Hacia el final de este capítulo, se revisarán las técnicas de control utilizadas y el proceso de simulación del conjunto. 3.1. Descripción del vehículo. El automóvil de combustión interna seleccionado para su conversión a propulsión eléctrica fue un Suzuki Maruti (Figura 3-1), sus principales características técnicas se describen a continuación. Tabla 3-1: Ficha técnica. Características del automóvil Potencia Máxima Peso Torque máximo Largo Ancho Alto Consumo promedio. 26 640 57 3300 1405 1410 15. kW kg Nm mm mm mm km/l. Este vehículo presentó una serie de ventajas con respecto a otros de similares características, ya que los principales puntos de decisión fueron: . Reducido tamaño. . Bajo peso. . Medianamente baja resistencia aerodinámica. . De construcción simple (fácil de modificar). . Costo reducido (para su adquisición).
(38) 26. Figura 3-1: Fotografía del automóvil Por el peso y las dimensiones de los 6 módulos ultracapacitores, se construyó una estructura de aluminio para ser puesta en la parte trasera del vehículo; ocupando parte del maletero y sobre los asientos traseros abatidos como se puede ver en la Figura 3-2.. Figura 3-2: Montaje de ultracapacitores en vehículo.
(39) 27. Los módulos son conectados con el inversor, el cual se localiza en la zona donde se encontraba el motor original del auto, con 12 cables de poder; ya que no existe punto neutro común, pues cada uno de los ultracapacitores es una fuente flotante. 3.2. Descripción del inversor. Se construyó un inversor multinivel de 9 niveles, con el fin de alimentar el motor BLDC de tracción. Para realizar este inversor se utilizó una conocida técnica en los inversores multinivel (Rodriguez, Lai, & Peng, 2002), que consiste en poner en cascada (o serie) varios puentes H en cada fase (Tolbert, Peng, & Habetler, 1998). En primer lugar resulta importante recordar cuál es la topología del puente H y en particular como es controlada su operación. En la Figura 3-3 podemos ver que un puente H se construye con 4 semiconductores (en nuestro caso IGBT), teniendo como entrada una fuente de voltaje V y como salida los terminales A-B.. + V -. SBU. SAU. B. A. SBD. SAD. Figura 3-3: Esquema de puente H Activando la conducción de un IGBT (en rojo) o desactivando la misma (color negro), es posible variar la tensión entre los terminales A-B, tal como se muestra en la figura a continuación..
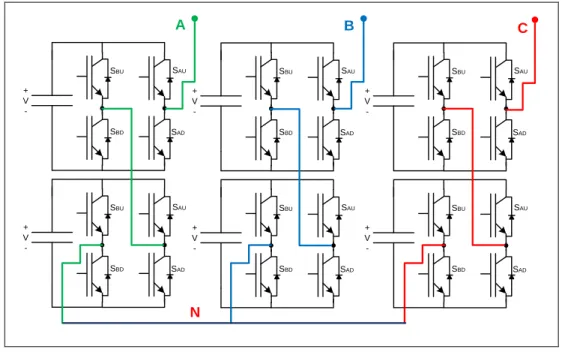
(40) 28. SBU + V -. B. SAU. A SBD. + V -. B SBD. SAD. VAB = -V. + V -. A. SAU. SBU. SAU. SBU. B. A SBD. SAD. SAD. VAB = 0. VAB = +V. Figura 3-4: Operación de puente H Al poner 2 puentes en cascada por cada fase, es posible variar la tensión de cualquiera de las fases (A, B, o C) con respecto al punto neutro (N), de modo de obtener 5 niveles distintos de voltajes; de esta forma se obtienen 9 niveles para la tensión entre cualquiera de las fases (-4V, -3V, -2V, -V, 0, +V, +2V, +3V, +4V). A SBU. B. SAU. + V -. SBU. SAU. + V SBD. SAD. SBU. SAU. + V SAD. SBU. SAU. SBD. SAD. SBU. SAU. SBD. SAD. + V SBD. SAD. SBU. SAU. + V SBD. C. + V SBD. SAD. N. Figura 3-5: Esquema completo del inversor multinivel.
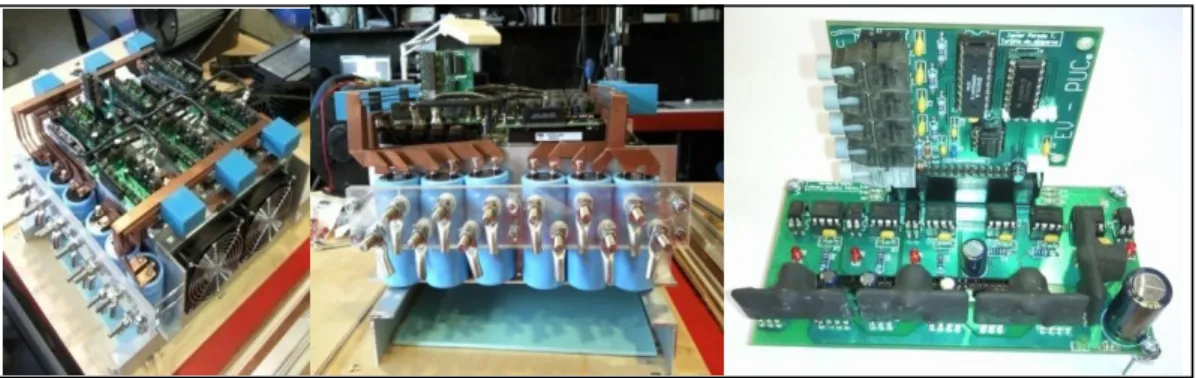
(41) 29. Aunque existen módulos IGBT que disponen directamente de la configuración para ser utilizados como puente H, debido a las limitaciones de corriente y al costo de reposición de estos equipos; se utilizaron puentes trifásicos (la configuración más común para inversores) en donde sólo será utilizadas 2 se sus 3 piernas (Figura 3-6). De esta manera el equipo estará trabajando a lo sumo a dos tercios de la potencia para el cual fue fabricado, y eventualmente al quemarse alguno de los semiconductores que lo componen, es posible intercambiar las piernas en operación y poder así seguir operando como un puente H completamente funcional.. SAU. SBU. SCU. SAD. SBD. SCD. + V -. Figura 3-6: Puente IGBT usado en construcción del inversor. Figura 3-7: Inversor de 9 niveles construido.
(42) 30. 3.3. Técnica de control a utilizar. Según lo revisado hasta ahora, para ajustar el torque de la máquina es necesario controlar sus corrientes de armadura de la misma según lo mostrado en la Figura 2-9 del capítulo anterior. La intensidad de la corriente o valor “techo” de la onda rectangular, es la que controla la magnitud del torque que entrega la máquina en el eje y su forma, es decir perfectamente plana, es la que nos asegura un torque también plano en el rotor. De esta manera resulta evidente que es importante controlar tanto la operación sincronizada por medio de los sensores de efecto Hall, como la calidad de la onda de corriente aplicada. Existen diversos trabajos dedicados a la minimización del ripple del torque de la máquina BLDC ((Ashabani, Kaviani, Milimonfared, & Abdi, 2008), (Bharatkar, Yanamshetti, Chatterjee, & Ganguli, 2008), (Liu, Zhu, & Howe, CommutationTorque-Ripple Minimization in Direct-Torque-Controlled PM Brushless DC Drives, 2007),(Liu, Zhu, & Howe, Direct torque control of brushless DC drives with reduced torque ripple, 2005),(Rodriguez & Emadi, 2007) ), el cual es producido en su mayor parte en los instantes de conmutación de cada una de las seis etapas de operación del motor. Por ende, el eje central del problema y el punto que produce la diferenciación de cada trabajo es el modo en que se controlan las corrientes de la máquina. Básicamente son utilizados 3 tipos de control para las corrientes de alimentación del motor, los cuales son: . PWM con portadora triangular. . Muestreo periódico. . Banda de histéresis. De los métodos mencionados, el seleccionado para este proyecto fue el método de control de corrientes utilizando banda de histéresis, debido a las ventajas que.
(43) 31. presenta para este proyecto en particular respecto a los otros métodos, las cuales serán expuestas a continuación.. 3.3.1 Banda de histéresis El método de banda de histéresis, es esencialmente un método mediante el cual se mantiene el error de la corriente (e) respecto a la referencia (Iref), dentro de un determinado valor. De esta manera se diferencia de un esquema de control convencional, los cuales generalmente buscan mantener el error lo más cercano a cero posible en todo instante. La estrategia se puede entender mejor en el diagrama de flujo que se muestra en la Figura 3-8, en donde e representa el valor del error entre la corriente de referencia y la corriente medida (. ), eMAX es el mayor valor que se le permite tomar al. error y eMIN el menor valor que puede tomar la misma variable.. e > emax Disminuir Corriente. No. Si. Si. No. Aumentar Corriente. e < emin. Figura 3-8: Diagrama de flujo de control por histéresis El comportamiento del error (e) de una corriente controlada por el método de banda de histéresis puede observarse en la Figura 3-9 3-9. La zona verde es donde el error de la corriente puede variar libremente y la zona rojiza es en donde el.
(44) 32. controlador se ve forzado a actuar de manera que el valor del error vuelva a los límites aceptables. El punto 1 en la Figura 3-9 3-9 muestra un ejemplo en el que el error sobrepasa su límite inferior (e < eMIN) y por consecuencia el controlador debe conmutar el inversor con el fin de disminuir el valor de la pendiente de la corriente y entrar de nuevo en la zona verde. El punto 2 ejemplifica el caso opuesto al anterior, en donde el error sobrepasa su límite superior (e > eMAX) y por ende se debe aumentar la pendiente corriente para llevar su valor nuevamente dentro de los límites. Los puntos 3, 4, y 5 son ejemplos de instantes en los que el error de la corriente se mantiene en la zona verde y en consecuencia el controlador mantiene la última operación realizada (en este caso particular aumentar la pendiente de la corriente).. 2 e=eMAX 3 4. e=0. 5 e=eMIN 1 Δt1. Δt2. Figura 3-9: Corriente controlada por banda de histéresis Como características principales del método, podemos decir que se encuentra el hecho de que no se preocupa en lo absoluto del valor de la corriente cuando ésta se encuentra dentro de los rangos permitidos para su valor (determinados por eMAX y eMIN); por otro lado, podemos ver que la frecuencia a la cual debe conmutar el controlador (cuando se requiere aumentar o disminuir la corriente) no es ni constante ni determinable, debido a que depende del valor de las variables en juego en cada instante del proceso (notar. y. de la Figura 3-9). Sin embargo su. frecuencia máxima sí es determinable, lo que permite evitar que los IGBTs sean.
(45) 33. sobrepasados por la frecuencia de conmutación. Al ser determinable, los parámetros tales como la misma banda de histéresis se pueden ajustar para limitar la frecuencia. (Ver Anexo J).. 3.3.2 Banda de histéresis multinivel Exactamente en la misma línea del método de control de corriente por banda de histéresis convencional, la utilización de múltiples bandas de histéresis para controlar la operación de máquinas eléctricas, ha sido probada con éxito en varios trabajos anteriores ((Corzine, 2000),(Lock & da Silva, 2007),(Loh P. C., Bode, Holmes, & Lipo, 2003),(Loh, Bode, & Tan, 2005),(Zare & Ledwich, 2002)). Dentro de las ventajas que se pueden contar en la utilización de multiplicidad de niveles, las más relevantes para nuestro proyecto son: el hecho de que permite una respuesta más rápida a los cambios de la corriente y por otro lado se adecúa perfectamente a la topología de los inversores multinivel. Como se puede observar en la Figura 3-10, el comportamiento de la variable controlada por varias bandas de histéresis es muy similar al que tiene visto con anterioridad; sin embargo, además de la banda principal de control dada por los límites de error mínimo y máximo (zona verde); podemos identificar distintos subniveles de referencia del error, los cuales nos permiten entregar una respuesta más precisa para un nivel de error en particular. Por ejemplo si la corriente medida tiene un valor muy distante de la referencia lógicamente sería más conveniente aplicarle un mayor voltaje al motor, de modo que ésta se acerque rápidamente a la referencia; sin embargo en el caso contrario, con un error muy pequeño será siempre más conveniente aplicar un menor voltaje ya que de lo contrario se producirá una mayor perturbación en la corriente..
(46) 34. e = Iref - IL e=eMAX ΔBs ΔBp ΔBp. ΔBs. e=eMIN. Figura 3-10: Corriente controlada por múltiples bandas de histéresis Aunque cada banda puede tener distintos niveles de referencia, por lo general se estandariza su operación de modo de generar una banda principal (la que determinará el error mínimo del controlador) dada por se posicionan equidistantemente de la primera por los dos parámetros mencionados (. y. y el resto de las bandas . De esta manera, variando. ), se puede configurar el controlador. variando su tiempo de respuesta y frecuencia de conmutación, entre otros. Como el inversor a utilizar consta de 9 niveles, el controlador debe utilizar 4 niveles positivos y 4 niveles negativos para las bandas de histéresis, lo que genera 9 rangos entre cada uno de los cuales se debería aplicar una acción distinta. La Figura 3-11, muestra la configuración en que se encuentra el inversor para controlar la corriente entre la fase A y la B (IAB). Las fuentes en verde representan los puentes H de la fase A, mientras las azules representan los de la fase B..
(47) 35. LA. AH. LB. IAB. BH. AL. BL N. Figura 3-11: Esquema de conexión para corriente entre las fases A y B A modo de ejemplo, en la Tabla 3-2 podemos ver las diferentes acciones que se podrán tomar para mantener la corriente IAB, según la banda en que se encuentre el error. El símbolo “+1” se refiere a un puente H entregando un voltaje positivo en el sentido representado en la Figura 3-11, el símbolo “-1” se refiere a lo contrario y el “0” representa un puente H entregando tensión nula. Tabla 3-2: Rangos de control y posibles operaciones. Banda Mínimo Máximo AL 4 3 2 1 0 -1 -2 -3 -4. BP+3BS BP+2BS BP+BS BP -BP -BP-BS -BP-2BS -BP-3BS x. x BP+3BS BP+3BS BP+3BS BP -BP -BP-BS -BP-2BS -BP-3BS. +1 +1 +1 +1 0 0 0 0 -1. AH. BL. BH. +1 +1 +1 0 0 0 0 -1 -1. -1 -1 0 0 0 0 +1 +1 +1. -1 0 0 0 0 +1 +1 +1 +1. 3.3.3 Técnica de control con banda multinivel Aunque la Tabla 3-2 nos proporciona una referencia en el actuar del control respecto de la información que nos entregan las bandas, el asunto resulta ser un.
(48) 36. poco más complejo. Como podemos ver en la misma tabla, debido a que los puentes H se conectan en serie para modificar la corriente, podemos notar que existen varias combinaciones para generar un mismo voltaje en los terminales del inversor. Por ejemplo para generar el voltaje correspondiente a “Banda 3” se usó la configuración (+1,+1,-1,0), pero bien podría haberse usado (+1,+1,0,-1). Por otro lado la simple utilización de la tabla anteriormente mostrada sería más bien un control proporcional discreto; ya que para poder operar realmente como banda de histéresis es necesario conocer no sólo el estado actual del error, sino que también su valor en el instante de conmutación anterior. En la Figura 3-12 se muestra el comportamiento que tendría una corriente al ser controlada utilizando múltiples bandas de histéresis. Este diagrama podría corresponder al transiente que ocurre al variar drásticamente la referencia, en donde la curva se va ajustando cada vez más hacia la banda principal e idealmente se mantiene ahí. Como se puede apreciar en la misma figura, aunque los puntos 1 y 2 se encuentran en el mismo rango de error (entre B1 y B2), la respuesta del controlador (voltaje VAB) es completamente distinta en consecuencia de que ésta depende de la respuesta del mismo en el instante de conmutación anterior. Se observa de la misma figura que al tener más niveles de respuesta, el control puede responder más rápido en los cambios repentinos de la variable, sin embargo esto no quita que en estado estable la velocidad de las conmutaciones sea igual o incluso más bajas que utilizando una única banda de control..
(49) 37. IAB ERROR B4 B3 B2 B1. B-1 B-2 B-3 B-4. VAB +4V +3V +2V +V -V -2V -3V -4V. Figura 3-12: Corriente IAB controlada y correspondiente variación del voltaje del inversor. Como se observó en el comportamiento de la corriente controlada por múltiples bandas de histéresis (figura anterior), el nivel de error o banda que tomará como referencia el controlador para operar el inversor, no es directamente el resultado de la medición de la magnitud del error, sino que rescata también información del período anterior. Esto último se debe al hecho de que se debe mantener la esencia del control por banda de histéresis tradicional (de una banda), en donde al elegir una de las bandas superiores en magnitud, ésta no debe reducirse hasta llegar a las bandas de distinto signo. Viendo la Figura 3-12, podemos ver que cuando el error cruza el umbral de B4, se activa la respuesta -4V y aunque la magnitud del error decrece debido a dicha acción, la respuesta del controlador permanece constante hasta que el error cambia de signo (al llegar al umbral B-1). Además de lo mencionado, el controlador debe mantener en todo momento un límite máximo de.
(50) 38. frecuencia de operación debido a limitaciones de los semiconductores (IGBT), de modo que esta variable también influye de alguna manera en la selección de la banda (ver proceso en Figura 3-13). SELECCIÓN DE BANDA. abs(Bnueva). > abs(Bprev). O signo(Bnueva). != signo(Bprev). SI NO Frecuencia < Frec. Máx.. NO. SI Banda=Bnueva. Banda=Bprev. Figura 3-13: Diagrama de flujo para elección de banda 3.3.4 Balance de voltajes entre ultracapacitores Al estar los ultracapacitores como fuentes flotantes (uno por cada puente H que contiene el inversor) y operando el inversor como se ha explicado anteriormente, es lógico y esperable que la descarga de estos módulos no se hará de forma pareja. El hecho de que los módulos tengan un distinto valor de voltaje nos perjudica por al menos tres motivos: el primero es que el controlador podría trabajar incorrectamente, ya que opera sobre la premisa de que puede usar cualquier combinación de puentes para obtener un voltaje específico, el segundo motivo consiste en la limitación de descarga de los ultracapacitores, los cuales serán descargados hasta un tercio de su valor nominal, de modo que el primer módulo que alcance esa cota obliga al controlador a dejar de operar el motor, y el tercer motivo guarda relación con el uso eficiente de los módulos, debido a que de flujo.
(51) 39. de corriente que se genera al utilizarlos (ya sea cargándolos o descargándolos) provoca calor, resulta recomendable utilizarlos de manera equilibrada para así minimizar la temperatura de cada módulo. En general para los inversores multinivel debe ser una preocupación el balancear correctamente el uso de sus fuentes de alimentación, sean estas ultracapacitores o cualquier otra (Tolbert L. , Peng, Cunnyngham, & Chiasson, 2002). Muchas veces la intención de balancear los voltajes se toma normalmente como un objetivo secundario al control, aunque existen algunos proyectos que incluyen técnicas de balance especiales y anexas al control de corrientes (Lu, Zhu, Tian, & Wang, 2007). La desventaja de los sistemas anexos para la ecualización de los voltajes, reside en el hecho de que para hacer el balance se utilizan conmutaciones o intercambios de energía cuyo único propósito es igualar las tensiones y no el objetivo principal del controlador, que es ajustar el nivel de torque de la máquina. En el presente trabajo se ideó una forma de balancear los voltajes de manera muy precisa y sin usar ninguna conmutación extra o sistema auxiliar de ecualización. La técnica creada hace uso del hecho de que para mantener una corriente controlada en una banda de histéresis, en algunos momentos es necesario tanto aumentar su valor como disminuirlo. Para aumentar la corriente, los puentes han de operarse de manera que el voltaje de los mismos sea más alto que el inducido por el motor y de esta manera la corriente fluye desde los ultracapacitores hacia el motor (Figura 3-14-a). Por otro lado, para disminuir la corriente los puentes deben ser operados de manera inversa, es decir manteniendo una tensión menor que la del motor, pero a diferencia del caso anterior la corriente seguirá teniendo básicamente el mismo valor (por ser una carga inductiva) y por ende en este caso la corriente fluye hacia los ultracapacitores (Figura 3-14-b)..
(52) 40. + V -. IM. V + a). IM. b). Figura 3-14: a) aumentado corriente de motor b) disminuyendo corriente Debido al hecho de que el inversor es multinivel, para cada caso en que se requiera tanto aumentar o disminuir la corriente habrá varias posiciones en que los puentes se pueden encontrar para generar la misma tensión en terminales. Es esta redundancia en los niveles del inversor lo que nos permite decidir que módulos ocupar. Por ende intentaremos usar los más cargados en el caso de querer aumentar la corriente y los menos cargados en el caso de querer disminuirla. Sin considerar que los puentes pueden dar el nivel cero al ser cortocircuitados o que se pueden restar unos con otros para obtener distintos voltajes, debido a que estas operaciones involucran un gasto energético extra; existe un número determinado de combinaciones posibles para operar cada nivel (Tabla 3-3). De esta manera podemos ver que, por ejemplo, al utilizar las bandas 4 (máxima tensión en terminales) sólo existe una combinación posible y por ende no puede haber selección de módulos ni balance de voltajes. Por otro lado desde los niveles 1 a 3 existen entre 4 y 6 combinaciones posibles, lo que permite una diversidad de operaciones de carga y descarga entre módulos..
(53) 41. Tabla 3-3: Combinaciones para generar un nivel de voltaje en terminales Nivel. Número de combinaciones. 0 1 2 3 4. 1 4 6 4 1. La mayoría de los sistemas de ecualización de voltajes, utiliza una cierta diferencia como referencia para comenzar a operar; por ejemplo, si algún módulo presenta una diferencia de más de 1 Volt del promedio, gatilla que el sistema de ecualización entre en acción a modo de bajar esa diferencia. Nuestro sistema en cambio, opera constantemente, ya que utiliza el mismo ciclo de conmutación de control de la corriente (que generalmente varía entre 1kHz y 15kHz) para equilibrar los voltajes (Figura 3-15), por ende tiene una mejor precisión para mantener todos los voltajes en el mismo valor que el método mencionado anteriormente..
(54) 42. 0 (baja carga) (H1). a). A. (H2). IM. IM < Iref (aumentar corriente) + V (alta carga) (H3). + V (baja carga) -. b). - V (alta carga) +. (H1). 0 (baja carga). B. (H4). 0 (alta carga). A. (H2). IM. IM > Iref (disminuir corriente) 0 (alta carga) (H3). - V (baja carga) +. B. (H4). Figura 3-15: Ejemplo de operación para en nivel +2 (a) y nivel -2 (b). El sistema de control de voltajes, el cual como se mencionó antes funciona de forma paralela al sistema de control de corrientes, resulta ser un sencillo algoritmo (Figura 3-16) que primero se encarga de ordenar los posibles puentes a utilizar (4 como máximo), y luego según el signo de la banda seleccionada (por el control de corriente), opera los más cargados (voltaje más alto) en el momento de aumentar la corriente y los menos cargados en el caso de disminuirla..
Figure




+7


Documento similar
