Prototipo virtual de una estructura inteligente Edición Única
116
0
0
Texto completo
(2) INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY DIVISIÓN DE INGENIERÍA Y ARQUITECTURA PROGRAMA DE GRADUADOS EN INGENIERÍA Los miembros del comité de tesis recomendamos que el presente proyecto de tesis presentado por el Ing. Alfredo Jacobo Puerta sea aceptado como requisito parcial para obtener el grado académico de: Maestro en Ciencias con Especialidad en Automatización. Comité de Tesis:. Dr. Ricardo Ambrosio Ramírez Mendoza Asesor. Dr. Hugo Ramón Elizalde Siller Sinodal. Ing. Ricardo Prado Gámez Sinodal. Aprobado:. Dr. Francisco Román Ángel Bello Acosta Director del Programa de Graduados en Ingeniería Diciembre, 2006.
(3) DEDICATORIA Por que con ellos fue difícil, pero sin ellos, no habría sido imposible, A MI FAMILIA, por creer en mí.. Y por que a donde quiera que voy siempre esta conmigo, A DIOS, por permitirme alcanzar mis sueños..
(4) AGRADECIMIENTOS A quienes con su ayuda contribuyeron a este logro: Francisco y Elena, por sus atenciones que me hicieron sentir en casa durante el curso de estos estudios. Gracias. Don Fidel, por apoyar desde su embestidura los proyectos de la juventud emprendedora de Mexquitic. Gracias. Mi asesor, Dr. Ramírez, por su apoyo y disposición para completar de forma atinada este trabajo. Gracias. Mis sinodales, Dr. Elizalde y M. C. Prado, por tener la gentileza de valorar y complementar con sus comentarios esta investigación. Gracias. Aquellos compañeros, que de una u otra forma con su amistad y ánimos facilitaron mi estancia en el ITESM. Gracias. Mi Familia, por que mis estudios han requerido de un gran esfuerzo de su parte y por que con sus consejos y enseñanzas he llegado hasta aquí. Familia, por la unidad que tenemos y de la que me siento participe. Gracias. Dios, por que tu haces posible lo imposible. En todo gracias..
(5) Resumen. Este documento presenta el desarrollo de un trabajo de investigación e implementación en software del concepto Estructuras Inteligentes, el cual es utilizado para el análisis y control activo de vibraciones en una estructura virtual del tipo “viga en voladizo (cantilever)”. En este concepto el objetivo de reducir las vibraciones de un sistema se logra mediante la modificación dinámica de la respuesta estructural del sistema, sin la acción de mecanismos externos de control. Es utilizado debido a su amplio rango de respuesta en frecuencia, alta adaptabilidad y gran eficiencia. El control de vibraciones en estructuras inteligentes se enfoca en la utilización de diferentes tipos de materiales conocidos como “inteligentes” y sus técnicas de control continúan aún desarrollándose. Aquí se propone un método de control alterno a los ya existentes, donde se discuten y aplican dos tipos de técnicas para lograr el control de vibraciones; la técnica “Proporcional + Integral + Derivativa (PID)” y la técnica de control de “Tres ramas o RST”. Los resultados de la implementación de tales técnicas son verificados en simulación para una comparación mutua. La investigación se ha centrado en la modelación en software de un prototipo virtual para el control de vibraciones, cuyo modelo esta basado en el método de elementos finitos el cual es útil en el diseño de estructuras mecánicas en las industrias aeronáutica y automotriz. Debido a su complejidad, este modelo es tomado como un prototipo experimental desde el que mediante una prueba de identificación se logra obtener un modelo matemático útil a las teorías de control mencionadas, permitiendo a su vez, dar alcance y solucionar la problemática del control de vibraciones. El resultado es el desarrollo de la simulación de un prototipo virtual que permite cuantificar la mejora en las variables de amplitud y tiempo de estabilización de la respuesta controlada respecto de la respuesta en lazo abierto del sistema. Lo anterior validará la adaptabilidad de la estructura ante las cambiantes condiciones de esfuerzo a las que es sometida.. i.
(6) ii.
(7) Índice. 1. Introducción.............................................................................................................................1 1.1 Motivación.........................................................................................................................2 1.2 Objetivo. ............................................................................................................................4 1.3 Hipótesis. ...........................................................................................................................4 1.4 Alcance. .............................................................................................................................4 1.5 Metodología.......................................................................................................................5 1.6 Organización......................................................................................................................7 2 Estructuras Inteligentes.............................................................................................................9 2.1 Definiciones de Estructura Inteligente. .............................................................................9 2.2 Aplicaciones y Principios de Funcionamiento de las Estructuras Inteligentes. ..............10 2.3 Materiales para Sensores y Actuadores. ..........................................................................11 3. Vibraciones mecánicas. .........................................................................................................15 3.1 Definición de vibración. ..................................................................................................15 3.2 Causas de las vibraciones mecánicas...............................................................................16 3.3 Consecuencias de las vibraciones mecánicas. .................................................................16 3.4 Modelo matemático clásico. ............................................................................................17 3.5 Modelación general del movimiento vibratorio. .............................................................17 3.6 Influencia de las vibraciones mecánicas en la operatividad de las estructuras. ..............19 3.7 Aspectos de energía en vibraciones.................................................................................20 3.8 Control y mitigación de vibraciones mecánicas. .............................................................21 3.9 Medición de vibraciones..................................................................................................22 4. Modelos matemáticos de una viga en cantilever. ..................................................................25 4.1.1 Modelado matemático basado en la teoría de vigas de Timoshenko. .....................26 4.1.2 Modelo matemático de vibración de una viga en cantilever para el primer modo de vibración. ...........................................................................................................................30 4.2 Modelación en elementos finitos.................................................................................33 5 Prototipos virtuales.................................................................................................................37 5.1 Modelación virtual en MSC. ADAMS............................................................................39 5.1.1 Construcción del modelo. .........................................................................................40 5.1.2 Modelación en elementos finitos..............................................................................41 5.1.3 Comunicación ADAMS/Simulink............................................................................45 6. Técnicas de control................................................................................................................49 6.1 Análisis de la Identificación de Sistemas. .......................................................................49 6.2 Algoritmo de mínimos cuadrados recursivos. .................................................................52 6.3 Controladores Digitales. ..................................................................................................56 6.4 PID digital. ......................................................................................................................56 6.4.1 Estructura..................................................................................................................57 6.4.2 Cálculo de los parámetros del controlador PID digital.............................................59 6.4.3 Modelo muestreado de la planta...............................................................................60 6.4.4 Especificación del desempeño..................................................................................60 6.4.5 Cálculo de los parámetros del controlador. ..............................................................61 6.5 Colocación de polos mediante un control RST. ..............................................................62 6.5.1 Estructura..................................................................................................................62 6.5.2 Regulación [Cálculo de R(z-1) y S(z-1)].....................................................................63. iii.
(8) 6.5.3 Error de estado estable. ............................................................................................ 66 6.5.4 Seguimiento.............................................................................................................. 67 7. Pruebas de simulación y resultados....................................................................................... 69 7.1 Identificación del modelo................................................................................................ 69 7.2 Diseño del sistema de control.......................................................................................... 73 7.3 Control con PID digital. .................................................................................................. 74 7.4 Control con RST.............................................................................................................. 75 7.5 Implementación del sistema de control........................................................................... 76 7.6 Simulación....................................................................................................................... 78 7.6.1 Prototipo virtual........................................................................................................ 78 7.6.2 Simulación 1............................................................................................................. 79 7.6.3 Simulación 2............................................................................................................. 84 8. Conclusiones y trabajos futuros. ........................................................................................... 93 8.1 Conclusiones. .................................................................................................................. 93 8.2 Trabajos futuros............................................................................................................... 94 Bibliografía................................................................................................................................ 97 Anexos....................................................................................................................................... 99 Código de cálculos para el diseño de los controladores........................................................ 99. iv.
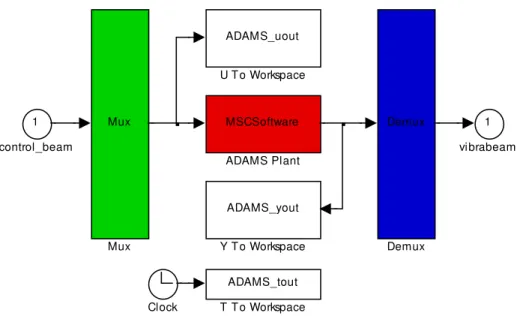
(9) Índice de figuras. Fig. 1.1 Sistema de control activo. ..............................................................................................2 Fig. 1.2 Metodología de la investigación. ...................................................................................3 Fig. 1.3 Metodología de solución. ...............................................................................................6 Fig. 3.6.1 Diagrama de causa - efecto de las vibraciones en Estructuras..................................19 Fig. 3.8.1 Diagrama de la función de transferencia de un dispositivo de amortiguación, cuando el fenómeno perturbador actúa en la salida del sistema........................................21 Fig. 3.8.2 Diagrama de la función de transferencia de un dispositivo de amortiguación, cuando el fenómeno perturbador actúa en la entrada del sistema..................................................21 Fig. 3.9.1 Sensor Acelerómetro. ................................................................................................23 Fig. 4.1 Modelo de viga de Euler Bernoulli. .............................................................................25 Fig. 4.2 Modelo de viga de Timoshenko. ..................................................................................26 Fig. 4.3 Diagrama de cuerpo libre. ............................................................................................26 Fig. 4.4 Formas de vibración para los primeros 3 modos.........................................................30 Fig. 4.5 Modelo de vibración de una viga en cantilever como un sistema masa-resorte. .........31 Fig. 5.1 Proceso de un prototipo virtual. ...................................................................................38 Fig. 5.2 Proceso de implementación de un prototipo virtual.....................................................38 Fig. 5.3 Algoritmo de modelación de un prototipo virtual en ADAMS....................................39 Fig. 5.4 Modelo básico de la viga en cantilever. .......................................................................41 Fig. 5.5 Vista isométrica del mallado automático del modelo en elementos finitos. ................42 Fig. 5.6 Fuerzas aplicadas sobre el modelo de la viga. .............................................................43 Fig. 5.7 Comportamiento general de desplazamiento vertical del extremo libre de la viga, evaluado en ADAMS View...............................................................................................44 Fig. 5.8 Interacción de los parámetros de entrada/salida de la planta con el sistema de control. ...........................................................................................................................................45 Fig. 5.9 Modelo de ADAMS exportado a Simulink..................................................................46 Fig. 5.10 Subsistema del bloque adams_sub. ............................................................................47 Fig. 6.1 Aspectos del diseño de un controlador.........................................................................49 Fig. 6.2 Aspectos para la estimación de parámetros..................................................................51 Fig. 6.3 Pasos del algoritmo de identificación por mínimos cuadrados. ...................................54 Fig. 6.4 Diagrama de bloques de un lazo de control digital utilizando un controlador PID discreto. .............................................................................................................................59 Fig. 6.5 Diagrama de bloques de un sistema de control de tres ramas utilizando un controlador PID discreto. ......................................................................................................................59 Fig. 6.6 Colocación de Polos con un controlador R – S – T. ....................................................63 Fig. 6.7 Respuesta para P(z-1) = 1 – 0.5z-1.................................................................................64 Fig. 6.8 Generación de la trayectoria deseada y*(t). .................................................................68 Fig. 6.9 Sistema de control R-S para regulación. ......................................................................68 Fig. 7.1 Diagrama de bloques de la prueba de Identificación. ..................................................70 Fig. 7.2 Resultados de la estimación de los parámetros del modelo; gráfica superior: salida actual vs salida del modelo, gráfica inferior: error la simulación del modelo...................71 Fig. 7.3 Respuesta al impulso del modelo identificado (roja) en comparación con la respuesta de la planta real (azul). ......................................................................................................72 Fig. 7.4 Respuesta en frecuencia del modelo identificado. .......................................................73 Fig. 7.5 Diagrama del lazo de control para un control RS. .......................................................75. v.
(10) Fig. 7.6 Respuesta en lazo abierto (azul), respuesta esperada en lazo cerrado con control PID (verde) y respuesta esperada en lazo cerrado con control RST (roja)............................... 77 Fig. 7.7 Geometría de la viga empotrada en un extremo (viga en cantilever). ......................... 78 Fig. 7.8 Prototipo mecánico de ADAMS bajo la acción de entradas de manipulación y perturbación....................................................................................................................... 79 Fig. 7.9 Respuesta modelo identificado de segundo orden (roja), respuesta de modelo de ADAMS (azul). ................................................................................................................. 80 Fig. 7.10 Respuesta en frecuencia del modelo identificado de segundo orden; parte superior: magnitud, parte inferior: ángulo........................................................................................ 80 Fig. 7.11 Gráfica de respuesta en lazo cerrado por colocación de polos. ................................. 81 Fig. 7.11 Diagrama del sistema de control PID por retroalimentación..................................... 82 Fig. 7.12 Diagrama del sistema de control RST (solo regulación) por retroalimentación........ 82 Fig. 7.13 Respuesta en lazo abierto (azul), respuesta esperada en lazo cerrado con control PID (verde) y respuesta esperada en lazo cerrado con control RST (roja)............................... 83 Fig. 7.14 Respuesta en frecuencia de: lazo abierto (azul), lazo cerrado del PID (verde), y lazo cerrado del RST (roja). Grafica superior de magnitud y gráfica inferior de fase.............. 84 Fig. 7.15 Prototipo mecánico de ADAMS bajo la acción de entradas de manipulación y perturbación....................................................................................................................... 85 Fig. 7.16 Respuesta modelo identificado de segundo orden (roja), respuesta de modelo de ADAMS (azul). ................................................................................................................. 86 Fig. 7.17 Respuesta en frecuencia del modelo identificado de segundo orden; parte superior: magnitud, parte inferior: ángulo........................................................................................ 87 Fig. 7.18 Diagrama del sistema de control PID por retroalimentación ante múltiples perturbaciones. .................................................................................................................. 88 Fig. 7.19 Diagrama del sistema de control RST (solo regulación) por retroalimentación ante múltiples perturbaciones. .................................................................................................. 88 Fig. 7.20 Respuesta en lazo abierto (azul), respuesta esperada en lazo cerrado con control PID (verde) y respuesta esperada en lazo cerrado con control RST (roja)............................... 89 Fig. 7.21 Respuesta en frecuencia de: lazo abierto (azul), lazo cerrado del PID (verde), y lazo cerrado del RST (roja). Grafica superior de magnitud y gráfica inferior de fase.............. 90 Fig. 7.22 Respuesta en lazo abierto (azul), respuesta esperada en lazo cerrado con control PID (verde) y respuesta esperada en lazo cerrado con control RST (roja)............................... 91. vi.
(11) Índice de Tablas. Tabla 1.1 Diagrama de Gant de actividades en metodología. .....................................................5 Tabla 4.1 Frecuencias naturales para los primero tres modos de vibración. .............................30 Tabla 5.1 Parámetros dimensionales de la viga en cantilever. ..................................................40 Tabla 7.1 Dimensiones y características del prototipo (viga en cantilever) de simulación.......78 Tabla 7.2 Resultados de simulación ante una entrada impulso (fuerza de impacto).................84 Tabla 7.3 Resultados de simulación 2. ......................................................................................90 Tabla 7.4 Resultados de simulación 2 (variación 1)..................................................................91. vii.
(12) viii.
(13) Prototipo Virtual de una Estructura Inteligente. 1. Introducción. A lo largo de una historia que apenas abarca 100 años, las industrias aeronáutica y automotriz han dado pasos de gigante en la mejora de su tecnología aspirando con ello a la fiabilidad absoluta. En los motores, por ejemplo, la electrónica ha sustituido a la hidromecánica en el control de estos y se trabaja aún para lograr mayor eficiencia en los consumos de combustible. Se han dado grandes avances también en aeronáutica, tales como los sistemas de aviso de peligro de colisión con otros aviones en ruta y las nuevas computadoras que dan información más detallada de la orografía del terreno. De estos adelantos no está exento el diseño de estructuras, el cual se está acercando cada vez más al uso en su constitución de materiales compuestos e innovadores que dan a su mecanismo el carácter de inteligente. Tal carácter se desarrolla a través de un control activo, el cual permite a su vez la mejora en prestaciones y adaptabilidad mecánica por sobre las condiciones de trabajo a las que una estructura se somete. Las estructuras inteligentes tienen múltiples aplicaciones, una de tales es el control de vibraciones indeseables, las cuales pueden ser desde molestas ondas de sonido hasta grandes oscilaciones de edificios. Las vibraciones son inevitables y muchas de ellas causan problemas. En el caso de un avión estas son más que evidentes, las debidas al trabajo de motores, las relacionadas a turbulencias, y las ocasionadas por las cambiantes condiciones de ambiente a las que se ve sometido en un trayecto de vuelo. Diferentes métodos son usados para minimizar las vibraciones indeseadas y se ha buscado agregar materiales que reduzcan sus efectos, sin embargo tales técnicas tienen limitaciones ya que típicamente agregan peso y además solo trabajan para ciertas frecuencias de vibración. Para sobrepasar esas limitaciones se promueve el uso de materiales inteligentes con propiedades controlables. Estos materiales llegan a ser los nervios y músculos de una estructura inteligente mientras una computadora trabaja como su cerebro para las acciones de control [7]. El control activo de vibraciones utilizando estructuras inteligentes, se aplica en la reducción de vibraciones de un sistema por medio de la modificación dinámica de la respuesta estructural de los sistemas. Las estructuras inteligentes son sistemas de ingeniería que tienen la habilidad de reaccionar a estímulos, similarmente al comportamiento biológico de los seres vivos. El control activo de vibraciones es ampliamente usado debido a su amplio rango de respuesta en frecuencia, gran adaptabilidad y alta eficiencia. En la Fig. 1.1 se presenta un diagrama típico de un sistema de control activo. Este sistema consiste en sensores, los cuales son utilizados para monitorear la respuesta mecánica de la estructura mediante cambios en los desplazamientos, esfuerzos o aceleraciones. Una vez que una respuesta estructural indeseable se detecta en los sensores, un controlador genera entonces la entrada necesaria en los actuadores. Los actuadores responden a esta entrada y producen un cambio correspondiente en la respuesta mecánica de la estructura para un estado más aceptable. La capacidad de las estructuras inteligentes para sentir y adaptarse a su ambiente permite un amplio rango de aplicaciones: supresión de vibraciones de estructuras aéreas; control de ruido de rotores de 1.
(14) Prototipo Virtual de una Estructura Inteligente helicópteros; monitoreo de condiciones de puentes; control de forma de grandes estructuras espaciales [8].. Actuadores. Estructura. Sensores. Sistema de control. Fig. 1.1 Sistema de control activo.. Una gran variedad de elementos sensores y actuadores pueden utilizarse en las aplicaciones de estructuras inteligentes. Así dependiendo del material utilizado, los elementos sensores y actuadores pueden ser controlados por medio de energía eléctrica, magnética, térmica o luminosa. Algunos materiales comunes para sensores y actuadores son los materiales piezoeléctricos, aleaciones con memoria de forma, fibra óptica, materiales electrostrictivos, materiales magnetostrictivos, y fluidos electroreológicos [4]. En los materiales piezoeléctricos, una carga eléctrica se produce debido a la deformación mecánica, la cual es llamada efecto piezoeléctrico directo y la deformación mecánica es producida debido a la aplicación de un campo eléctrico lo cual es llamado efecto piezoeléctrico inverso. El acoplamiento de las propiedades mecánicas y eléctricas de los materiales piezoeléctricos permite su uso como sensores y actuadores. Cuando son utilizados como actuadores, estos materiales pueden generar una respuesta de vibración secundaria en un sistema mecánico, la cual podría reducir la respuesta total mediante la interferencia destructiva con la respuesta original del sistema causada por la fuente primaria de vibración. Las conocidas como estructuras inteligentes permiten este tipo de aplicaciones ya que estas son capaces de percibir las condiciones de ambiente, procesar la información y entonces reaccionar apropiadamente de acuerdo a las demandas requeridas. En un principio estas aplicaciones se reducían al área de la construcción para solucionar problemas de balanceo en puentes y edificios, pero se han encontrado ahora nuevas y generosas oportunidades limitadas tan solo por la propia imaginación, este es el caso de las industrias automotriz y aeroespacial [9].. 1.1 Motivación. La necesidad de conocer el concepto de estructura inteligente para el desarrollo del diseño de un controlador para el control de vibraciones, es parte fundamental de la motivación de esta investigación, así mismo la innovación que representa su aplicación en el campo de las 2.
(15) Prototipo Virtual de una Estructura Inteligente industrias automotriz y aeronáutica. Donde el diseño de un sistema de control adecuado se basa en un modelo matemático preciso que representa la estructura en consideración para predecir la respuesta estructural. Se desarrolla un amplio trabajo de modelación de un prototipo virtual, para conseguir la mejor aproximación de las características físicas reales de la estructura. Utilizando el software computacional MSC ADAMS se efectuó el trabajo de diseño mecánico de una viga en cantilever de especificaciones conocidas. El modelado incluye el análisis bajo el método de elementos finitos, el cual permite la discretización del cuerpo rígido haciendo una conversión al tipo flexible. El mallado y análisis del cuerpo se realiza por medio de ADAMS al tiempo que se definen las restricciones de carga. Debido a la complejidad del modelo desarrollado por el método de elementos finitos en el software computacional, este modelo se presenta impropio para su uso en las técnicas de control que se desean utilizar. Por tal razón se realizaron pruebas de identificación del modelo mediante la técnica de mínimos cuadrados aplicada en el software Matlab para llevar la estructura del modelo mecánico a la forma de una función de transferencia en tiempo discreto que representa el comportamiento dinámico de la viga. De esta forma el procedimiento podrá ser aplicado en situaciones de diferente naturaleza y complejidad. La identificación de un modelo es posible gracias a la versatilidad del software ADAMS, el cual permite la exportación del modelo mecánico creado, en la forma de un bloque del tipo función de transferencia, este bloque contiene la información procesada de la modelación en elementos finitos. Este bloque es simulado en Matlab/Simulink para la prueba de mínimos cuadrados. Modelación mecánica del prototipo virtual Identificación de modelo en tiempo discreto Diseño del sistema de control Simulación Virtual del prototipo en cosimulación Análisis de resultados. Fig. 1.2 Metodología de la investigación.. 3.
(16) Prototipo Virtual de una Estructura Inteligente. Obtenido el modelo útil para la aplicación de los métodos de control en estudio, se desarrolla un procedimiento de cálculo basado en la teoría de diseño de los controladores PID y RST, de donde se obtienen resultados que deben han sido analizados. El diagrama de la Fig. 1.2 presenta de manera esquemática la secuencia de pasos a seguir para conseguir el control activo de vibraciones en una viga en cantilever mediante la modelación virtual.. 1.2 Objetivo. Se desea desarrollar un prototipo virtual de una estructura flexible (viga en cantilever) que permita el análisis de su comportamiento mecánico en función de la deflexión que sufre ante la presencia de fuerzas de perturbación del tipo impulso. El diseño permitirá la adecuación de un sistema de control activo para el control de las vibraciones que se generan de estas perturbaciones. De esta forma será posible la implementación en co-simulación de la ley de control obtenida a partir de la sintonización de dos tipos de controladores (PID y RST) en tiempo discreto. Los resultados obtenidos característicamente serán medibles en función del tiempo de estabilización y amplitud de las vibraciones de la respuesta controlada respecto de la respuesta en lazo abierto del sistema o estructura.. 1.3 Hipótesis. El concepto de estructuras inteligentes, es aplicable al control activo de vibraciones de una viga en cantilever sometida a cargas perturbadoras. Este concepto es compatible a la realización de un prototipo virtual que permite el análisis de la respuesta estructural del sistema. De esta forma es posible la aproximación de un modelo identificado que junto con las técnicas de control discreto PID y RST promueven el alcance de mejoras en las variables de amplitud y tiempo de estabilización de la deflexión medida en la viga.. 1.4 Alcance. El alcance de la investigación se centra en la modelación de un prototipo virtual de una viga en cantilever en el software computacional ADAMS, que permita la simulación de la respuesta mecánica ante perturbaciones en estado no controlado y controlado. Además se considera la implementación de un sistema de control basado en la teoría de dos técnicas de control (PID y RST), cuya ley de control obtenida se aplica de forma de fuerzas directas al prototipo, considerando la acción de un actuador de ganancia 1 sin dinámica que afecte a la señal de manipulación para la verificación de resultados.. 4.
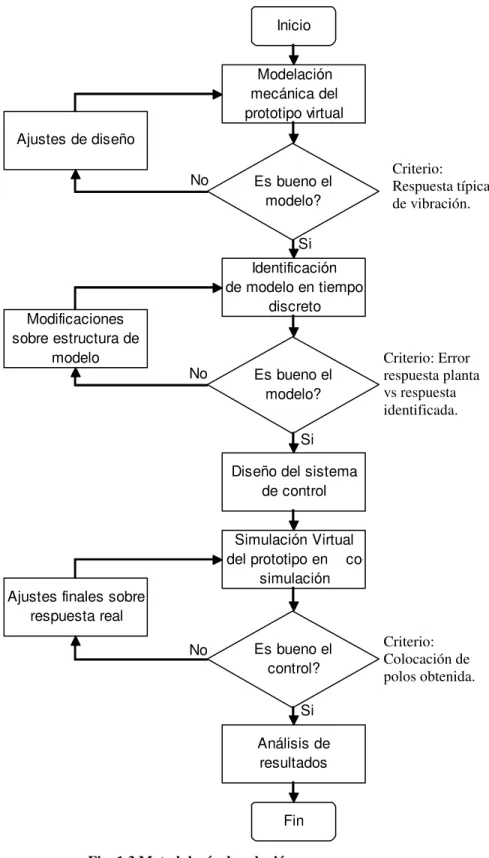
(17) Prototipo Virtual de una Estructura Inteligente Aunado a lo anterior, se realiza un bosquejo por el concepto de estructura inteligente y sus potenciales aplicaciones. Así como de la disponibilidad de materiales y tecnología que hacen posible su aplicación en el control activo de vibraciones.. 1.5 Metodología. La solución de la problemática planteada tiene como base el proceso descrito en el diagrama de bloques de la Figura 1.2, donde cada una de las etapas contiene ciertas actividades de trabajo que se detallan a continuación: Etapa1. Etapa2. Etapa3. Etapa4. Etapa5. 1. Modelación mecánica del prototipo virtual. a. Dibujo en ADAMS/View de la estructura ideada para el desarrollo del prototipo virtual (viga en cantilever). b. Colocación de restricciones de trabajo, tales como selección del extremo fijo y colocación de fuerzas actuadoras y perturbadoras. c. Conversión del diseño, del tipo cuerpo rígido al tipo flexible mediante ADAMS/Autoflex, por medio de la discretización en elementos finitos. d. Creación de variables de estado que permitirán la comunicación con el software de control Matlab, estas son asignadas según los requerimientos de entrada o salida. e. Exportación de la planta de ADAMS a Matlab/Simulink, al tiempo que se definen las variables a utilizar como de entrada o salida. 2. Identificación del modelo en tiempo discreto. a. Verificación de la correcta exportación de la planta de ADAMS a Matlab/Simulink a través de una prueba de co-simulación Matlab/ADAMS. b. Realización de la prueba d identificación por el método de mínimos cuadrados recursivos. c. Comparación de los resultados del error en la respuesta entre el modelo identificado y el real de ADAMS. 3. Diseño del sistema de control. a. Definición de los parámetros de colocación de polos; Máximo Sobretiro y Tiempo de estabilización para el comportamiento en lazo cerrado. b. Diseño del controlador PID discreto. c. Diseño del controlador RST. 4. Simulación virtual del prototipo en co-simulación. a. Simulación del diseño de ambos controladores en el modelo identificado. b. Simulación del diseño de ambos controladores en el modelo de la planta de ADAMS (planta virtual). c. Realización de ajustes sobre el sistema de control específico de la planta real. 5. Análisis de resultados. a. Obtención de la respuesta en frecuencia esperada del lazo cerrado. b. Verificación de las gráficas de respuesta obtenidas de cada controlador c. Cuantificación de resultados en base al sobretiro y tiempo de estabilización obtenidos.. Tabla 1.1 Diagrama de Gant de actividades en metodología.. 5.
(18) Prototipo Virtual de una Estructura Inteligente Inicio Modelación mecánica del prototipo virtual Ajustes de diseño No. Es bueno el modelo?. Criterio: Respuesta típica de vibración.. Si. Modificaciones sobre estructura de modelo. Identificación de modelo en tiempo discreto. No. Es bueno el modelo?. Criterio: Error respuesta planta vs respuesta identificada.. Si Diseño del sistema de control Simulación Virtual del prototipo en cosimulación Ajustes finales sobre respuesta real No. Es bueno el control?. Criterio: Colocación de polos obtenida.. Si Análisis de resultados. Fin. Fig. 1.3 Metodología de solución.. Un diagrama de flujo del procedimiento de solución puede ser una modificación al diagrama de la figura 1.2, el cual se presenta en la forma del diagrama de la figura 1.3.. 6.
(19) Prototipo Virtual de una Estructura Inteligente. 1.6 Organización. En esta investigación se reporta la información considerada de importancia para la compresión del tema. La organización del trabajo presenta una revisión bibliográfica en la sección 2 en donde se presentan los conceptos fundamentales existentes en la teoría de estructuras inteligentes partiendo de un bosquejo por aquellos materiales que contienen un cierto desarrollo tecnológico para su uso en este tipo de aplicación. La sección 3 presenta un acercamiento a los conceptos básicos del análisis de vibraciones mecánicas desde sus causas y efectos hasta las consideraciones para el modelado matemático generalizado. En la sección 4 se presenta el análisis matemático de una viga en cantilever en forma clásica y se discuten las consideraciones a tomar en cuenta para la utilización en software del método de elementos finitos. En la sección 5 se discute el concepto de un prototipo virtual, así como sus beneficios en la simulación y análisis de estructuras en elementos finitos, aquí se presentan las bases de diseño mecánico en el software de simulación (ADAMS) para el estudio de la respuesta libre de una viga en cantilever, cuyo concepto puede aplicarse directamente al diseño de una estructura de mayor complejidad, se presenta también el desarrollo del modelado virtual del sistema mecánico junto con la comunicación con el software de control. Se incluye en la sección 6 una descripción detallada de las técnicas utilizadas en el diseño del sistema de control adecuado para el control de vibraciones, tales como la técnica de identificación por el método de mínimos cuadrados, el diseño de un control PID y el diseño de un control RST en tiempo discreto. En el capítulo 7 se presentan algunos de los experimentos realizados que permiten validar la propuesta de investigación así como la comparación cuantitativa de los resultados. Finalmente se incluye en la sección 8, las conclusiones finales que resultan de las pruebas experimentales realizadas, y se plantean oportunidades de mejora sobre la presente investigación, en los trabajos futuros que proseguirán a la presente investigación.. 7.
(20) Prototipo Virtual de una Estructura Inteligente. 8.
(21) Prototipo Virtual de una Estructura Inteligente. 2 Estructuras Inteligentes.. 2.1 Definiciones de Estructura Inteligente. Desde diferentes campos de trabajo, existen también puntos de vista de diferentes autores respecto al concepto de una estructura inteligente: La versión japonesa de este término [9] se refiere a aquellos materiales que desarrollan sus propias funciones inteligentemente, dependiendo de los cambios ambientales. Sin una definición clara de ambiente, el concepto se explica mediante la clasificación de inteligencia de los materiales en tres categorías: 1. Funciones Primitivas. Esta categoría constituye esencialmente funciones adaptables relacionadas a sensor, actuador y capacidades del procesador. 2. Funciones Macroscópicas. Este nivel alberga la inteligencia inherente en los materiales. 3. Utilidad Social. Este nivel considera la inteligencia de los materiales desde un punto de vista del estado humano y se refiere a las propiedades del material, los cuales son clasificadas como: amigables, racionales o irracionales y armoniosos. En 1989, Vincent [9] describió a los materiales inteligentes como aquellos materiales que pueden sentir (el equivalente del dolor en el cuerpo humano) y los cuales pueden ser usados para fabricar una estructura de diseño específico. Otra definición es el concepto viene de Nakatani también en 1989 [9] quien sitúa a los materiales con inteligencia como aquellos que pueden fabricar respuestas apropiadas desde el procesamiento de varios tipos de señales, condiciones de ambiente y sus objetivos particulares. Los materiales inteligentes tienen una característica autonomía, una versatilidad flexible y una alta adaptabilidad a los requerimientos de la humanidad y la naturaleza. William B. Spillman en 1996 dio una definición con mayor formalidad [7] definiendo a una estructura inteligente como una estructura física no biológica que cuente con los siguientes atributos: (i). un propósito definido.. (ii). medios suficientes para alcanzar ese propósito.. (iii). un patrón biológico de funcionamiento.. De las definiciones anteriores se puede concluir una idea general en la que una estructura inteligente es un sistema conformado de partes multifuncionales que pueden sensar controlar y actuar; es una analogía primitiva de un cuerpo biológico. Es decir es una estructura capaz de. 9.
(22) Prototipo Virtual de una Estructura Inteligente percibir las condiciones de su ambiente de trabajo, procesar la información obtenida de esta característica y entonces reaccionar apropiadamente para adaptarse a tales condiciones.. 2.2 Aplicaciones y Principios de Funcionamiento de las Estructuras Inteligentes. La ciencia de materiales y la ingeniería estructural, se desenvuelven hoy día en un ámbito donde el desarrollo de los materiales adaptables y sus aplicaciones en estructuras inteligentes tiene una gran importancia. Los requerimientos básicos de una estructura inteligente son tres capacidades que la distinguen; sensibilidad, procesamiento o control, y activación [7]. Junto a estas necesidades se debe contar con un control activo en forma autónoma o adaptable para la estructura dinámica. Esto se refiere al algoritmo de control, el cual debe calcular la reacción apropiada basada en la información obtenida del sensor, la cual generalmente puede presentarse en forma impredecible. Una aplicación especial es la habilidad de aprender y pensar basada en las experiencias pasadas. Esta habilidad se logra bajo el concepto de un controlador de red neuronal, el cual permite en la medida del aprendizaje, generar entonces la mejor respuesta prediciendo de esta forma su comportamiento. Hoy día ya se trabaja en la aplicación de este tipo de controladores, y una de sus aplicaciones potenciales está en robótica donde el interés no solo esta en fabricar máquinas de inteligencia artificial para capacidades de cálculos sino además cuerpos inteligentes, huesos y piel inteligentes [6]. Las estructuras inteligentes están siendo desarrolladas en campos tales como tecnología biomédica, industria aeroespacial, construcción civil, control de vuelo entre otros. Su amplio rango de aplicaciones va desde la supresión de vibraciones en aviones y grandes estructuras espaciales, hasta aplicaciones de autodiagnóstico para detección de fallas o defectos inmersos en una estructura o construcción. Así pues la respuesta de las estructuras sujetas a variaciones de carga podría ser mejorada mediante la implementación de puntos de control. Lo cual involucra la acción de materiales adaptables que sean incluidos dentro de los miembros axiales en orden del incremento de la carga crítica en tales puntos que contrarreste la respuesta indeseada para obtener una adecuada a las necesidades. Otra aplicación de este tipo de estructuras es el control de formas, en el cual la forma de una estructura es modificada de acuerdo a la forma deseada, esto efecto se logra por el medio de la inclusión de actuadores apropiados [4]. Otras aplicaciones incluyen la activación mecánica convencional, tal como el control de forma de alas de aviones, el cual requiere de acoplamientos y uniones mecánicas. Así mismo en la industria de la transportación sobretodo espacial, el peso es una de las principales restricciones y es ahí donde la búsqueda por materiales más ligeros que ahorren peso se vuelve todo un reto 10.
(23) Prototipo Virtual de una Estructura Inteligente por alcanzar un funcionamiento similar a sus contrapartes convencionales. Estas grandes estructuras que originalmente involucran trabajos de precisión, son frecuentemente flexibles, tienen bajo peso y bajo amortiguamiento, aún y cuando la vibración representa un importante problema. De esta forma se desea siempre tener un mínimo número de partes, por lo que también los trabajos usualmente realizados por actuadores y sensores convencionales, implican la transferencia de energía mecánica de forma tal que algunas veces una importante porción de esta es pérdida en forma de fricción, calor y otras. El objetivo de utilizar materiales adaptables reside en permitir a una estructura cambiar su forma o propiedades estructurales mientras se evitan los problemas mencionados de actuadores y sensores mecánicos, mejorando de esta forma el funcionamiento y vida útil. El uso de materiales adaptables reemplaza el uso de acoplamientos mecánicos complejos y sistemas de actuadores. Donde el material integrado a la estructura da como resultado una reducción de material y por lo tanto de peso. Así mismo las propiedades mecánicas de los sensores y actuadores inteligentes pueden ser controladas por temperatura, campo magnético o campo eléctrico. Esta característica permite la implementación de técnicas de control más a avanzadas cuya ley de control puede ser procesada por tales materiales al contrario de los actuadores convencionales de un sistema [7].. 2.3 Materiales para Sensores y Actuadores. Los materiales adaptables son usados como sensores para medir variables tales como: desplazamientos, esfuerzos, aceleraciones y otros cambios mecánicos en las estructuras. Ya como actuadores, el material adaptable es dirigido por el controlador para actuar o causar cambios mecánicos. Por ejemplo en supresión de vibración, la acción de la estructura inteligente cuantifica la vibración e incrementa el rango de amortiguamiento; en control de forma son accionados para cambiar la forma de las estructura; en control aeroelástico estático, los actuadores producen giros adicionales y compensación en las alas. Consecuentemente los tipos de materiales adaptables pueden ser clasificados según el tipo de transformación de energía que manejen, los más utilizados son [9]: 1. Eléctrica-Mecánica; materiales piezoeléctricos, materiales electrostrictivos, fluidos electroreológicos. 2. Magnética-Mecánica; materiales magnetostrictivos, fluidos magnetoreológicos. 3. Luminosa-Mecánica; fibra óptica. 4. Térmica-Mecánica; aleaciones con memoria de forma (SMA). Las aleaciones con memoria de forma (SMA) son materiales que pueden ser deformados plásticamente a bajas temperaturas durante su fase martensítica, entonces el aumentar la temperatura ocasiona en los materiales el regreso a su forma original. Las fuerzas manejadas para esos cambios afectan en la transformación martensítica y la estructura enrejada del 11.
(24) Prototipo Virtual de una Estructura Inteligente material. Por tanto se debe considerar limitar tales temperaturas ya que el retorno de forma puede no ser completo bajo condiciones extremas, es decir los SMA pueden perder su memoria. La aleación con memoria de forma comercialmente con mayor disponibilidad es la aleación Níquel-Titanio. Los SMA pueden ser usadas como sensores y cuando se utilicen como actuadores, estas pueden recobrarse de esfuerzos por sobre el 8% de su límite de elasticidad [12]. Esto implica que si son deformadas entonces generaran grandes fuerzas. Estos materiales han tenido exitosas aplicaciones en medicina y en el campo aeroespacial. Algunas de sus principales desventajas son, un tiempo de respuesta lento debido a sus grandes constantes de tiempo, la restricción del rango de temperatura de operación y los grandes requerimientos de energía a causa de las pérdidas por temperatura. Los sensores de fibra óptica son otra opción viable para los materiales adaptables, estas fibras tienen diámetros relativamente pequeños y pueden ser incluidos en la estructura con insignificantes efectos en las propiedades de la estructura. En aplicaciones prácticas, una fuente de luz es enviada dentro de la red de estas fibras incluidas en la estructura. La señal es recibida en el otro extremo y es analizada. Cualquier cambio en la señal del haz de luz tal como: fase, polarización, frecuencia, amplitud de onda, intensidad, etc., corresponderá a un cambio mecánico en la estructura [5]. Estos sensores suelen ser usados para la detección de fallas en estructuras, pero pueden ser diseñados también para detectar esfuerzos y otras variables más. Una sofisticada red de fibra óptica es el análogo de un sistema nervioso de la estructura. Una ventaja más de la fibra óptica es que se encuentra libre de interferencia electromagnética, así como sus bajas pérdidas de energía en la transmisión de la luz. Los materiales magnetostrictivos pueden ser usados como actuadores, debido a su habilidad de tensionarse cuando son sometidos a un campo magnético. Así mismo una corriente es producida cuando son sometidos a esfuerzos, de ahí que pueden ser usados también como sensores. Diferentes materiales poseen estas propiedades sin embargo su efecto es comúnmente débil. Una excepción es una aleación comercialmente disponible “Terfenol-D”, la cual produce tensiones por sobre 0.2% [12]. En comparación con el material piezoeléctrico, el magnetostrictivo produce tensiones mayores ante una moderada fuerza de campo magnético. En general tienen buen tiempo de respuesta pero este podría ser fácilmente inhibido a altas frecuencias. Debido a sus grandes tensiones estos materiales se han usado como actuadores en el control de vibraciones añadiendo variaciones de tiempo, esfuerzos y desplazamientos. Al contrario de su gran capacidad de actuación, sus nolinealidades no son despreciables y dificultan el modelar analíticamente. Además de que su implementación en estructuras requiere del uso de un hardware muy especializado [10]. Otra clase de materiales adaptables es conocida como fluidos electroreológicos, los cuales contienen partículas dieléctricas distribuidas aleatoriamente en el fluido. Pero en la presencia de campo eléctrico esas partículas se alinean entre si en estructura de cadena en el fluido. Así el fluido se hace más viscoso, tanto como algunas otras propiedades del fluido sean modificadas. Estos materiales han sido estudiados principalmente en la supresión de vibraciones [10] donde el campo eléctrico aplicado conduce a un cambio en la matriz de esfuerzos de la estructura inteligente que los contiene. Una razón por la cual no son usados 12.
(25) Prototipo Virtual de una Estructura Inteligente comúnmente es la falta de una teoría consistente o modelos matemáticos para describir en forma precisa su comportamiento el cual debe comprender su viscosidad, solubilidad, entre otras. Los materiales electrostrictivos son aquellos que se someten a esfuerzos cuando un campo eléctrico les es aplicado. Por lo que son una buena opción para su uso como actuadores inteligentes. La estructura de estos materiales debe mostrar simetría central para dar relevancia a este efecto. Su ecuación constitutiva es nolineal y en ella el esfuerzo es proporcional al segundo orden del campo eléctrico. Así se incrementa la dificultad de un modelo estructural analítico. Estos materiales tienen bajas características de histéresis pero su esfuerzo es siempre extensional ya que son indiferentes a la polaridad del campo eléctrico. Por tal razón no pueden ser sensores muy efectivos, incluso cuando el campo eléctrico es retirado, no habrá polarización de la red por causa de la simetría del material [5]. El efecto piezoeléctrico es el efecto de dos tipos entre esfuerzo/deformación y campo eléctrico/diferencia de voltaje en materiales sin simetría central [11]. La anisotropía de la estructura del cristal, lo habilita para retener su polarización en la ausencia de un campo eléctrico externo. La principal propiedad del efecto piezoeléctrico que lo diferencia del efecto de electrostricción (cambio de geometría debido a un campo eléctrico aplicado) es que el material puede tanto expandirse como contraerse con respecto a su geometría original dependiendo del sentido del campo eléctrico aplicado. Los más tempranos experimentos de este fenómeno se atribuyen a los hermanos Curie, Pierre y Jacques, cuando en 1880 descubrieron el efecto piezoeléctrico directo donde un material piezoeléctrico sujeto a esfuerzo desarrolla una diferencia de potencial eléctrico. Los experimentos fueron realizados en cristales tales como turmalinas y cuarzo. Tiempo después el efecto piezoeléctrico inverso fue descubierto, en el cual mediante la aplicación de un campo eléctrico en un material piezoeléctrico se provoca una deformación en este. En las estructuras inteligentes, el sensar significaría el efecto piezoeléctrico directo mientras que el actuar significaría el efecto inverso. Los materiales piezoeléctricos han sido usados en un amplio rango de aplicaciones tales como en transductores ultrasónicos, acelerómetros, gramófonos, resonadores, filtros, impresoras de inyección de tinta, así como varias clases de sensores y actuadores; incluyendo también las estructuras inteligentes. Los materiales piezoeléctricos en comparación con las otras clases de materiales adaptables mencionados anteriormente, son menos difíciles de integrar en estructuras existentes y son relativamente menos nuevos. Los otros tipos de materiales adaptables carecen de modelos matemáticos consistentes a diferencia de los materiales piezoeléctricos, los cuales cuentan con modelos desarrollados analíticamente entre otros por Kelvin, Duhem, y Voight [11], durante el curso del siglo pasado. Los materiales piezoeléctricos pueden tener diferentes formas, tales como piezocerámicos (Zirconato Titanato), piezopolímeros ( Fluoruro Polivinilideno), fibras piezoeléctricas, entre otras.. 13.
(26) Prototipo Virtual de una Estructura Inteligente. 14.
(27) Prototipo Virtual de una Estructura Inteligente. 3. Vibraciones mecánicas. Las vibraciones que ocurren en la mayoría de las máquinas, estructuras y sistemas dinámicos son indeseables, no solo por que resultan en movimientos desagradables, ruido y esfuerzos dinámicos los cuales producen fatiga y la falla de la estructura o máquina, si no también por que se pierde energía y se merma el desempeño debido a tales vibraciones. A principios del siglo pasado, las máquinas y estructuras usualmente tenían muy alta masa y amortiguamiento, ya que pesadas vigas, maderas y bastidores eran usados para su construcción. Desde que las fuentes de excitación de vibraciones fueron frecuentemente pequeñas en magnitud, la repuesta dinámica de esas pesadas máquinas era también pequeña. En tal caso con el desarrollo de materiales más ligeros y resistentes, se incremento el conocimiento de las propiedades del material y carga dinámica, y se mejoró el análisis y las técnicas de diseño, el peso de las máquinas y estructuras construidas para alcanzar una función particular han decrecido. Es más, la eficiencia y velocidad de la maquinaria se ha incrementado, de modo que las fuerzas de excitación de vibraciones son más grandes, y los sistemas dinámicos frecuentemente contienen altas fuentes de energía las cuales pueden ocasionar intensos problemas de vibración. La razón principal para analizar y diagnosticar el estado de una maquina es determinar las medidas necesarias para corregir la condición de vibración es reducir el nivel de las fuerzas vibratorias no deseadas y no necesarias. De manera que, al estudiar los datos, el interés principal deberá ser la identificación de las amplitudes predominantes de la vibración, la determinación de las causas, y la corrección del problema que ellas representan. El aumento permanente de las potencias en máquinas, junto con una disminución simultánea de gasto de materiales, y la alta exigencia de calidad y productividad industrial, hacen que el análisis dinámico de las vibraciones mecánicas en máquinas e instalaciones industriales sea cada vez más exacto. Se debe ser capaz de trabajar sobre vibraciones, calcularlas, medirlas, analizar el origen de ellas y aplicar correctivos. Hace más o menos 40 años, la temática de vibraciones mecánicas se constituyó en parte integral de la formación de ingenieros mecánicos en los países industrializados. El fenómeno de las vibraciones mecánicas debe ser tenido en cuenta para el diseño, la producción y el empleo de maquinaria y equipos de automatización.. 3.1 Definición de vibración. No existe una definición exacta de vibración; más sin embargo, se pueden considerar como vibraciones, las variaciones periódicas temporales de diferentes magnitudes. Específicamente, 15.
(28) Prototipo Virtual de una Estructura Inteligente una vibración mecánica es el movimiento de una película o de un cuerpo que oscila alrededor de una posición de equilibrio. Más claramente, es la razón de cambio de la energía potencial a energía cinética en un cuerpo flexible. Al intervalo de tiempo necesario para que el sistema efectúe un ciclo completo de movimiento se le llama periodo de la vibración, el número de ciclos por unidad de tiempo define la frecuencia del movimiento y el desplazamiento máximo del sistema desde su posición de equilibrio se llama amplitud de la vibración.. 3.2 Causas de las vibraciones mecánicas. La razón principal para analizar y diagnosticar el estado de una maquina es determinar las medidas necesarias para corregir la condición de vibración y así reducir el nivel de las fuerzas vibratorias no deseadas y no necesarias. De manera que, al estudiar los datos, el interés principal deberá ser la identificación de las amplitudes predominantes de la vibración y la determinación de las causas para la corrección del problema que ellas representan. Las causas de vibración son múltiples, pero básicamente las vibraciones se encuentran estrechamente relacionadas con: •. Tolerancias de mecanización.. •. Desajustes.. •. Movimientos relativos entre superficies en contacto.. •. Desbalances de piezas en rotación u oscilación.. •. Presencia de fuerzas externas de perturbación.. Los fenómenos anteriormente mencionados producen casi siempre un desplazamiento del sistema desde su posición de equilibrio estable originando una vibración mecánica.. 3.3 Consecuencias de las vibraciones mecánicas. La mayor parte de vibraciones en máquinas y estructuras son indeseables porque aumentan los esfuerzos y las tensiones por las pérdidas de energía que las acompañan. Además, son fuente de desgaste de materiales, de daños por fatiga y de movimientos y ruidos molestos.. 16.
(29) Prototipo Virtual de una Estructura Inteligente Todo sistema mecánico tiene características elásticas, de amortiguamiento y de oposición al movimiento; unas de mayor o menor grado que otras; pero es debido a que los sistemas tienen esas características lo que hace que el sistema vibre cuando es sometido a una perturbación. Toda perturbación se puede controlar, siempre y cuando se anexen bloques de control cuya función de transferencia sea igual o invertida a la función de transferencia del sistema. Si la perturbación tiene una frecuencia igual a la frecuencia natural del sistema, la amplitud de la respuesta puede exceder la capacidad física del mismo, ocasionando su destrucción [16].. 3.4 Modelo matemático clásico. La ecuación general de las vibraciones es [16]: a∂ 2 y b∂y + + ky = P(t ) ∂t ∂ 2t. (3.1). Donde y es la magnitud que sufre variaciones periódicas temporales, P(t) la variable de reforzamiento o fenómeno incidente de la vibración; a, b, y k son las constantes características del sistema. Utilizando transformada de Laplace, se tiene que: as 2 y (s ) + bsy (s ) + ky (s ) = P(s ). (as. 2. (3.2). ). + bs + k y (s ) = P(s ). y (s ) = G (s ) = P (s ). 1 b k s2 + s + a a. (3.3). Se puede observar que la ecuación 3.3 define la función de transferencia general del sistema de vibración, lo cual facilita la modelación y elaboración de simulaciones.. 3.5 Modelación general del movimiento vibratorio. Un fenómeno incidente cualquiera puede provocar vibraciones en un sistema, por lo tanto, en términos generales y universales, el movimiento vibratorio de un sistema afectado por un fenómeno incidente desencadenador de vibraciones puede ser [16]: 17.
(30) Prototipo Virtual de una Estructura Inteligente. n. Σ ai. i =0. ∂y i = P(t ) ∂t i. (3.4). En donde ai constituye la ith propiedad del sistema, P(t) la función de forzamiento, y la magnitud que varía periódicamente, i identifica el orden del sistema; aplicando transformada de Laplace se tiene: n. ∑ a s y (s ) = P (s ). (3.5). i. i. i =0. y (s ) = P (s ). 1. ∑a s. 1. =. n. i. 1 an. sn +. i. i =0. n −1. ∑a s. i. i. i =0. (3.6) La ecuación 3.4.6 identifica la función de transferencia universal de las vibraciones.. sn +. 1 an. n −1. ∑a s. (3.7). i. i. i=0. Así mismo, la ecuación 3.7 identifica la ecuación característica universal de las vibraciones. Cuando la estructura de la vibración es lineal, tenemos que la solución a la función general de transferencia es: 1. G (s ) = sn +. 1 an. n −1. ∑a s. i. i. i =0. (3.8) G (s ) =. bn b1 b2 + +L+ (s + R1 ) (s + R2 ) (s + R n ) n. G (s ) = ∑ i=0. b1 (s + R1 ). (3.9). Como: F (s ) = ∫ e − st f (t )dt. Se tiene que: n. G (s ) = ∑ i =1. n bi ⇒ G (t ) = ∑ bi e − R1t (s + Ri ) i =1. Entonces: n Y (t ) = ∑ bi e − R1t P(t ) i =1 . 18. (3.10).
(31) Prototipo Virtual de una Estructura Inteligente. 3.6 Influencia de las vibraciones mecánicas en la operatividad de las estructuras. Las vibraciones mecánicas representan un factor de gran influencia en la calidad del trabajo que realiza una estructura. La rigidez de los órganos de trabajo y de sus apoyos, se define como la capacidad del sistema para resistir cargas exteriores, asimilando las deformaciones elásticas admisibles sin alterar considerablemente la capacidad de trabajo del sistema. El coeficiente de rigidez se puede determinar mediante la siguiente ecuación [15];. J=. P Fuerza = Λy Deformación. (3.11). Algunas veces cuando un sistema tiene buenas condiciones de rigidez, se minimizan las causas y los efectos de las vibraciones.. Condiciones de rigidez. Vibraciones en estructura. Mala calidad de estabilidad. Condiciones de carga.. Fig. 3.6.1 Diagrama de causa - efecto de las vibraciones en Estructuras.. Se hace notar que la pretensión principal de la presentación de los modelos físicos y teóricos sobre las vibraciones en las estructuras, es tener el acopio apropiado de conceptos que posibilitan entender el discurrir de dinámica del proceso de comportamiento estructural. La rigidez en una estructura depende de las condiciones geométricas, la elasticidad del material y el sistema de ensamble de las partes, tal como lo indica la figura 3.6.1. Las condiciones operativas de carga dependen de la velocidad de estas, la magnitud de las reacciones y las condiciones de los miembros ensamblados. (Se debe entender como condiciones superficiales a la interacción geométrica entre las partes que componen la estructura). 19.
(32) Prototipo Virtual de una Estructura Inteligente. 3.7 Aspectos de energía en vibraciones. La energía que hace vibrar a un sistema mecánico se puede denotar como Ev; la energía natural del sistema se puede identificar como: EN =. 1 1 mV 2 + kX 2 2 2. (3.12). La energía absorbida por el mismo sistema o por el medio ambiente se denota Ea. 1 1 mV 2 (t ) + kX 2 (t ) − E a 2 2. (3.13). E (t ) =. 1 1 mV 2 (t 0 ) + kX 2 (t 0 ) 2 2. (3.14). E a (t ) =. 1 1 mV 2 (t 0 ) + kX 2 (t 0 ) 2 2. (3.15). EV =. Cuando t = 0 se tiene:. La energía absorbida por el ambiente o el sistema en forma de calor es: E a (t ) = K c (T f − T0 ). (3.16). En donde K identifica el coeficiente de transmisión de calor del sistema o del ambiente y Tf T0 la diferencia de temperatura. La temperatura en los alrededores del sistema o en el sistema mismo se puede expresar como: 1 mV 2 (t 0 ) + kX 2 (t 0 ) + T0 = T f 2K. (. ). (3.17). Pueden existir dilataciones en los sistemas mecánicos si son ellos mismos los que absorben dicha energía:. Deformación = Cons tan te(EnergíaCinéticaInicial − EnergíaPotencialInicial ) Por lo tanto, cuando un sistema mecánico absorbe la energía de su vibración, se pueden modificar sus condiciones físicas, provocando deformaciones. Así mismo, si la perturbación o vibración tiene una frecuencia igual a la frecuencia natural del sistema, la amplitud de la respuesta puede exceder la capacidad física del mismo, ocasionando su destrucción.. 20.
(33) Prototipo Virtual de una Estructura Inteligente. 3.8 Control y mitigación de vibraciones mecánicas. Identificando a P(t) como el fenómeno perturbador de un sistema, G1 la función de transferencia de dicho sistema, F(t) la entrada y Y(t) la salida del sistema, entonces se debe implementar un dispositivo de amortiguación que mitigue los efectos del fenómeno perturbador en la salida o entrada del sistema. Si el fenómeno perturbador afecta directamente la salida del sistema, tenemos:. N1(S). P(t). Y(t). F(t). G1(S). Fig. 3.8.1 Diagrama de la función de transferencia de un dispositivo de amortiguación, cuando el fenómeno perturbador actúa en la salida del sistema.. Para identificar N1 tenemos: G1 (s )F (s ) + P(s )N 1 (s )G1 (s ) + P(s ) = Y (s ) P(s )N 1 (s )G1 (s ) + P(s ) = 0 N 1 (s ) = −. 1. (3.18). G1 (s ). La ecuación 3.18 nos indica que el dispositivo de amortiguación debe tener una función de transferencia especificada por dicha ecuación para ser realmente efectivo. Ahora bien, si el fenómeno perturbador se encuentra a la entrada del sistema, tenemos que: P(t). F(t). N1(S). Y(t) G1(S). Fig. 3.8.2 Diagrama de la función de transferencia de un dispositivo de amortiguación, cuando el fenómeno perturbador actúa en la entrada del sistema.. 21.
(34) Prototipo Virtual de una Estructura Inteligente Para definir aquí N1 se tiene (Fig. 3.8.2): G1 (s )F (s ) + P(s )G1 (s ) + P(s )N 1 (s ) = Y (s ) P(s )G1 (s ) + P(s )N 1 (s ) = 0 N 1 (s ) = −G1 (s ). (3.19). En ciertos casos puede diseñarse efectivamente un sistema secundario masa - resorte, llamado amortiguador, para reducir las vibraciones de un sistema. Si se fuerza un sistema a vibrar con una frecuencia w1, un absorbedor k2, W2 acoplado a la misma frecuencia introducirá una fuerza de oposición igual a la fuerza perturbadora, para suprimir por completo el movimiento vibratorio del sistema original como se muestra en la ecuación 3.20. w1 =. k2 g W2. (3.20). Un amortiguador de este tipo tiene limitaciones en el sentido de que es efectivo sólo a una frecuencia. Así, para una perturbación de frecuencia variable, como el motor de automóvil, el amortiguador masa – resorte simple es inútil. Por lo tanto, la mitigación eficiente de las vibraciones de un sistema depende del grado de aproximación a un sistema de amortiguamiento ideal. Un importante requerimiento de todas las máquinas rotatorias es que el eje de rotación coincida con uno de los ejes principales de inercia del cuerpo. Este requerimiento es difícil de satisfacer exactamente en el proceso de fabricación, y por eso es necesario el balanceo, sobre todo para las máquinas de alta velocidad. Esto es evidente por el hecho de que la magnitud de cualquier desbalanceo es igual a la fuerza centrífuga Fc: Fc = mw 2 r. (3.21). En este caso puede obtenerse un balanceo completo al añadir o quitar pesos correctores, los cuales son el equivalente a un dispositivo de amortiguamiento ideal.. 3.9 Medición de vibraciones. Las vibraciones a medir pueden clasificarse como: •. Vibraciones periódicas.. •. Vibraciones de choque o transitorias.. •. Vibraciones aleatorias o estadísticas.. De éstas, el movimiento periódico es el más conocido, y los instrumentos para medir la frecuencia, amplitud, velocidad, aceleración o pendiente de onda, están bien desarrollados. 22.
(35) Prototipo Virtual de una Estructura Inteligente. En la medición de choques las aceleraciones pico son muy importantes. En el caso de los movimientos aleatorios, es deseable un espectro de frecuencias de los valores cuadráticos medios, y la instrumentación para esas mediciones son muy complejos y de evolución algo reciente. El sistema sísmico masa - resorte representa el elemento básico transductor de muchos instrumentos para medir la vibración. Según sean los límites de frecuencias utilizados, el desplazamiento, la velocidad o la aceleración, se indica por el movimiento relativo de la masa suspendida con respecto a su punto de fijación. Como las vibraciones son muchas veces demasiado pequeñas para la indicación mecánica, el movimiento relativo se convierte, en general, a tensión eléctrica (Volts) por el movimiento de una bobina en campo magnético. Dichas señales se pueden procesar en una Estación de Trabajo Asistida por Computador o Workstation. Los acelerómetros funcionan bajo el principio de masa - resorte sísmico:. Fig. 3.9.1 Sensor Acelerómetro.. El acelerómetro piezoeléctrico se utiliza para medir vibraciones cuya frecuencia sea inferior a unos 2 Khz., ya que su frecuencia natural es del orden de los 5 Khz. [7]. Para su utilización, todo el conjunto se fija al equipo al que se le van a medir las vibraciones. Cuando la masa sísmica aumenta o disminuye la presión sobre el cristal piezoeléctrico, éste genera un voltaje alterno cuya amplitud es proporcional a las aceleraciones de las vibraciones; y cuya frecuencia es igual a la de dichas vibraciones.. 23.
(36) Prototipo Virtual de una Estructura Inteligente. 24.
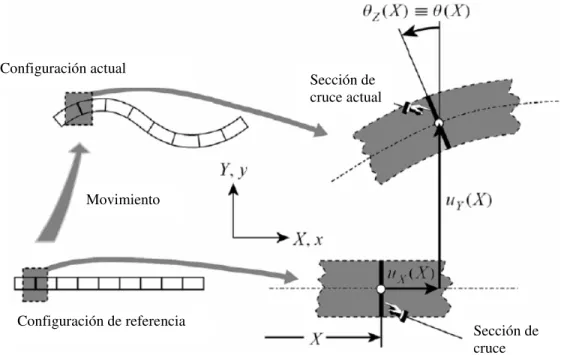
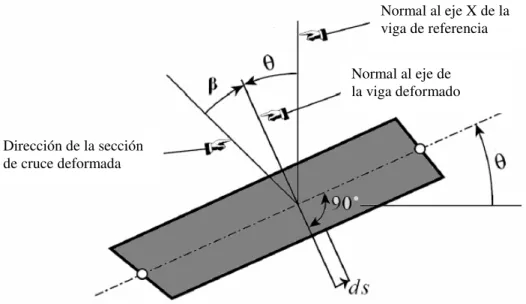
(37) Prototipo Virtual de una Estructura Inteligente. 4. Modelos matemáticos de una viga en cantilever. Existen dos modelos de uso común en la mecánica estructural de vigas [1]: •. El modelo de Euler-Bernoulli.. •. El modelo de Timoshenko.. El primero, también llamado teoría clásica de vigas, es el único considerado en los estudios elementales de la mecánica de materiales. Este modelo cuenta con efectos de momento flexionante sobre las deformaciones y esfuerzos. El efecto de las fuerzas cortantes en la deformación de la viga es ignorado. Su consideración fundamental es que las secciones transversales permanecen planas y normales al eje longitudinal deformado, según lo muestra la Fig. 4.1. En la Fig. 4.1 la rotación total de θ es debida únicamente al esfuerzo de flexión ignorando el esfuerzo cortante. La rotación ocurre cerca del eje neutral que pasa a través del centroide de la sección transversal.. Configuración actual. Sección de cruce actual. Movimiento. Configuración de referencia. Fig. 4.1 Modelo de viga de Euler Bernoulli.. Sección de cruce de referencia. El modelo de Timoshenko corrige a la teoría clásica de vigas con un efecto de primer orden de deformación por cortante. En esta teoría la sección transversal permanece plana y gira sobre el mismo eje neutral del modelo de Euler-Bernoulli, pero no permanece normal al eje longitudinal deformado como lo muestra la Fig. 4.2. La desviación de la normal es producida por un cortante transversal que es asumido como constante sobre la sección transversal. En la Fig. 4.2 la deformación total de la viga se compone de dos partes, uno debido a la flexión θ y el otro debido al corte β.. 25.
Figure

+7




Documento similar
La determinación molecular es esencial para continuar optimizando el abordaje del cáncer de pulmón, por lo que es necesaria su inclusión en la cartera de servicios del Sistema
1) La Dedicatoria a la dama culta, doña Escolástica Polyanthea de Calepino, señora de Trilingüe y Babilonia. 2) El Prólogo al lector de lenguaje culto: apenado por el avan- ce de
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
De hecho, este sometimiento periódico al voto, esta decisión periódica de los electores sobre la gestión ha sido uno de los componentes teóricos más interesantes de la
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
a) Implement a new architecture, making efficient use of new technological developments, information sources, and analytical methods. b) Establish an institutional and
