UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
VARIACIÓN DEL VAPOR DE AGUA EN LAS ESTACIONES BOGA Y TUNA A TRAVÉS DE OBSERVABLE GPS
Stefania Nieto Guzmán
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA BOGOTÁ, COLOMBIA
VARIACIÓN DEL VAPOR DE AGUA EN LAS ESTACIONES BOGA Y TUNA A TRAVÉS DE OBSERVABLE GPS
Stefania Nieto Guzmán
Trabajo de grado para optar el título de INGENIERA CATASTRAL & GEODESTA
Director: Ing. Miguel A. Ávila
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA BOGOTÁ, COLOMBIA
i
Notas de aceptación
_________________________________________
_________________________________________
_________________________________________
Director de Tesis
_________________________________________ Jurado
_________________________________________
ii “A mis padres, hermanos y sobrina,
Por el cariño incondicional que Siempre me han brindado y el apoyo Y acompañamiento constante durante El desarrollo de este proyecto”
iii
Agradecimientos
A mi director de tesis el Ingeniero Catastral y Geodesta Miguel Ávila Angulo por confiar en este proyecto así como por su acompañamiento desde que surgió, a el Ingeniero Agrónomo y Doctor Ingeniero Agrónomo Andrés Seco Meneses profesor del Departamento de Proyectos e Ingeniería Rural en la Universidad Pública de Navarra (España) por su colaboración durante el procesamiento de los datos y por compartir sus conocimientos y experiencia referente a la determinación de vapor de agua atmosférico con tecnología GPS, al Ingeniero Catastral y Geodesta David Monroy Machado docente de la universidad, por su colaboración con la instalación del software GAMIT/GLOBK y por compartir sus conocimientos acerca del mismo, al Ingeniero Catastral y Geodesta Oscar Aguirre Cuervo por compartir sus conocimientos en el software .
Agradezco al IGAC y al IDEAM por suministrarme la información necesaria para el desarrollo de este proyecto.
iv
TABLA DE CONTENIDO
INDICE DE FIGURAS ... vii
INDICE DE TABLAS ... ix
CAPÍTULO I: GENERALIDADES DEL PROYECTO ... 1
1.1 Introducción ... 1
1.2 Estado del Arte y Antecedentes ... 2
1.2.1 Antecedentes Internacionales ... 3
1.2.2 Antecedentes en Nacionales ... 6
1.3 Justificación ... 7
1.4 Declaración del problema ... 8
1.5 Preguntas y/o Hipótesis ... 9
1.5.1 Preguntas ... 9
1.5.2 Hipótesis ... 9
1.6 Objetivos ... 10
1.6.1 Objetivo General ... 10
1.6.2 Objetivos Específicos ... 10
CAPÍTULO II: SISTEMA DE POSICIONAMIENTO SATELITAL ... 11
2.1 Sistema Global de Navegación por Satélite - GNSS ... 11
2.2 Descripción y principio de funcionamiento del GPS ... 13
2.3 Componentes del GPS ... 14
2.3.1 Segmento Espacial ... 16
2.3.2 Segmento Control ... 18
2.3.3 Segmento Usuario ... 19
2.4 La señal GPS ... 19
v
2.5.1 Pseudorangos ... 21
2.5.2 Pseudorangos de Fase ... 23
2.5.3 Datos Doppler ... 23
2.5.4 RINEX ... 24
CAPITULO III: LA ATMOSFERA Y LA REFRACCIÓN ATMOSFÉRICA ... 26
3.1 La Atmósfera ... 26
3.2 Efectos Atmosféricos en la Señal GPS ... 29
3.2.1 Retraso Ionosférico ... 30
3.2.2 Retraso Troposférico ... 32
3.3 Modelos Troposféricos Y funciones de Proyección o de Mapeo ... 34
3.3.1 Modelos atmosféricos ... 35
3.3.2 Modelo Troposférico de Hopfield ... 37
3.3.3 Modelo Troposférico de Saastamoinen ... 38
3.3.4 Funciones de Mapeo o de Proyección ... 39
CAPÍTULO IV: VAPOR DE AGUA ATMOSFÉRICO Y SU ESTIMACIÓN CON TECNOLOGÍA GPS ... 44
4.1 Vapor de Agua Atmosférico ... 44
4.2 Técnicas para la Estimación del Vapor de Agua Atmosférico ... 45
4.3 Estimación del Vapor de Agua Empleando Tecnología GPS ... 46
CAPÍTULO V: METODOLOGÍA ... 49
5.1 Selección de la Época de seguimiento ... 51
5.2 Adquisición Datos Satelitales ... 51
5.3 Adecuación de Datos ... 52
5.4 Procesamiento de los Datos ... 52
vi
6.1 Comparación de Datos GPS y Radiosondeo ... 55
6.2 Vapor de Agua por GPS Estación BOGA ... 58
6.3 Vapor de Agua por GPS Estación TUNA ... 63
6.4 Vapor de Agua Atmosférico y Variables Meteorológicas ... 67
6.4.1 PW - BOGA y Datos Meteorológicos Estación UNIV NACIONAL ... 67
6.4.2 PW - TUNA y Datos Meteorológicos Estación UPTC ... 69
6.5 Vapor de Agua Diario con y sin Precipitaciones ... 71
6.5.1 Día con presencia de precipitaciones ... 71
6.5.2 Día sin presencia de precipitaciones ... 73
CONCLUSIONES ... 76
RECOMENDACIONES... 77
REFERENCIAS BILIOGRÁFICAS ... 78
vii
INDICE DE FIGURAS
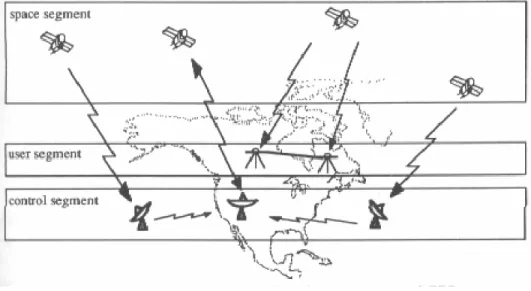
Figura 1 Representación gráfica de las componentes de GPS. ... 15
Figura 2 Constelación GPS ... 16
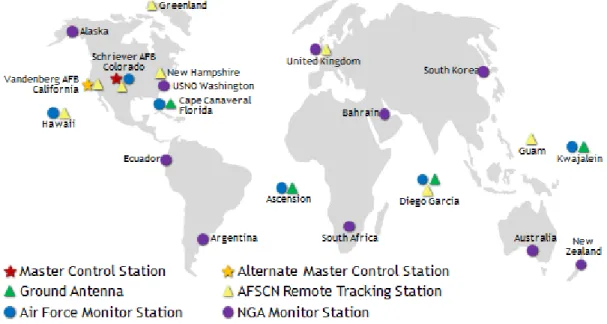
Figura 3 Segmento Control GPS ... 18
Figura 4 Modulación de la portadora... 20
Figura 5 Nombre de un archivo RINEX ... 25
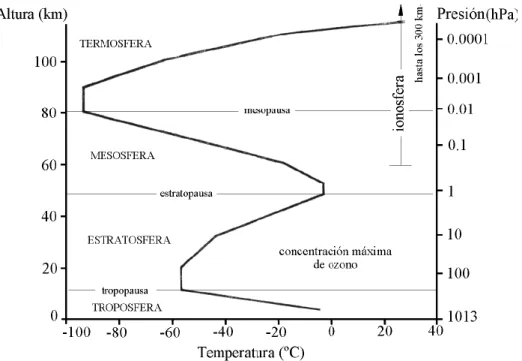
Figura 6 Variación de la Temperatura en la Atmósfera ... 28
Figura 7 Refracción Atmosférica de la Señal GPS ... 30
Figura 8 Metodología diseñada para el desarrollo del proyecto. ... 49
Figura 9 Localización de las Estaciones Continuas BOGA y TUNA ... 50
Figura 10 Estrategia Procesamiento con GAMIT. ... 52
Figura 11 Valores Vapor de Agua de PW (GPS) y PWRS (Radiosondeo) para el mes de Noviembre de 2012. ... 56
Figura 12 Valores Vapor de Agua de PW (GPS) y PWRS (Radiosondeo) para el mes de Junio de 2013. ... 56
Figura 13 Valores Vapor de Agua de PW (GPS) y PWRS (Radiosondeo) para el mes de Noviembre de 2013. ... 56
Figura 14 Valores Vapor de Agua de PW (GPS) y PWRS (Radiosondeo) para el mes de Junio de 2014. ... 57
Figura 15 Vapor de Agua Atmosférico sobre la Estación BOGA para Junio 2012 ... 59
Figura 16 Vapor de Agua Atmosférico sobre la Estación BOGA para el mes de Junio ... 60
Figura 17 Vapor de Agua Atmosférico sobre la Estación BOGA para el mes de Noviembre ... 61
Figura 18 Valor promedio diario de vapor de agua atmosférico sobre la estación BOGA mes de Junio. ... 62
Figura 19 Valor promedio diario de vapor de agua atmosférico sobre la estación BOGA mes de Noviembre. ... 63
Figura 20 Vapor de Agua Atmosférico sobre la Estación TUNA para el mes de Junio. ... 64
viii Figura 22 Valor promedio diario de vapor de agua atmosférico sobre la estación TUNA mes
de Junio. ... 66
Figura 23 Valor promedio diario de vapor de agua atmosférico sobre la estación TUNA mes de Noviembre. ... 67
Figura 24 Promedio diario de Vapor de Agua Atmosférico y Precipitación Diaria Acumulada para Junio y Noviembre de 2013. ... 68
Figura 25 Promedio diario de Vapor de Agua Atmosférico y Temperatura media diaria para Junio y Noviembre de 2013 ... 69
Figura 26 Promedio diario de Vapor de Agua Atmosférico y Precipitación Diaria Acumulada para Junio y Noviembre de 2013 ... 70
Figura 27 Promedio diario de Vapor de Agua Atmosférico y Temperatura Media Diaria para Junio y Noviembre de 2013 ... 71
Figura 28 Vapor de agua atmosférico para Junio 1, (a) Estación BOGA y (b) Estación TUNA. ... 72
Figura 29 Vapor de agua atmosférico para Noviembre 4. (a) Estación BOGA y (b) Estación TUNA ... 73
Figura 30 Vapor de agua atmosférico para Junio 19, (a) Estación BOGA y (b) Estación TUNA. ... 74
Figura 31 Vapor de agua atmosférico para Noviembre 17, (a) Estación BOGA y (b) Estación TUNA. ... 75
Figura 32 Estructuración de directorios. ... 82
Figura 33 Ejecución módulo sh_setup ... 83
Figura 34 Instrucciones para obtener coordenadas cartesianas lfile. ... 83
Figura 35 Archivo lfile para las estaciones BOGA y TUNA. ... 83
Figura 36 Configuración archivo process.defaults. ... 84
Figura 37 Configuración archivo sites.defaults. ... 85
Figura 38 Instrucciones actualización archivo station.info. ... 85
Figura 39 Archivo station.info ... 85
Figura 40 Configuración archivos sestbl. ... 86
Figura 41 Instrucción sh_gamit. ... 87
ix
Figura 43 Procesado sh_metutil ... 87
Figura 44 Contenido archivo met_ssss.yyddd ... 88
INDICE DE TABLAS Tabla 1 Características del sistema GPS ... 14
Tabla 2 Funciones y Productos de los Componentes de GPS ... 15
Tabla 3 Constantes de Refractividad Troposférica. ... 33
Tabla 4 Corrección termino B ... 39
Tabla 5 Corrección termino R ... 39
Tabla 6 Coeficientes de Niell para la función de mapeo de la componente seca ... 41
Tabla 7 Amplitudes estacionales para la función de mapeo de la componente seca ... 41
Tabla 8 Coeficientes promedio para la función de mapeo de la componente Húmeda ... 42
Tabla 9 Información de referencia Estación Aeropuerto Eldorado ... 55
1
CAPÍTULO I: GENERALIDADES DEL PROYECTO 1.1 Introducción
El agua es el recurso de vida fundamental para los seres humanos, por tanto, es necesario monitorear constantemente los lugares donde se encuentra. Generalmente está concentrada en los depósitos tradicionalmente identificados: quebradas, ríos, mares, acuíferos confinados, etc. La meteorología abre otra posibilidad a la medición de la concentración del líquido en otro lugar, el cielo, siendo la ciencia que se encarga de estudiar las variaciones y comportamientos del clima estrechamente relacionado con la atmósfera terrestre, es la indicada para describir el comportamiento del agua que se encuentra en la parte alta de nuestro planeta, más exactamente, en la tropósfera.
En Colombia, país con una amplia biodiversidad en climas y especies, es de gran importancia poseer métodos de predicción de fenómenos meteorológicos para aprovechar las condiciones que se presentan en cada uno de las diferentes fases climatológicas. Más aún cuando se presenta un fenómeno desestabilizador de los ecosistemas como el calentamiento global, cobra real importancia obtener o realizar acercamientos a métodos que permitan un monitoreo de la cantidad del agua en el cielo, debido a que se concentra de forma gaseosa en la tropósfera, capa más baja de la atmósfera, amplifica el efecto invernadero y puede llegar a ser una herramienta útil para la predicción de temporadas de precipitación o de sequía según sea la concentración en el medio.
Por tanto, el GPS no solamente es útil para encontrar la ubicación u otra aplicación involucrada con la localización sobre el globo terrestre, actualmente existen conjuntos de receptores dedicados a otros campos del conocimiento, como la Meteorología, usando la señal y analizándola para convertirla en un sensor meteorológico continúo, densificado mediante las redes geodésicas nacionales y mejorando la temporalidad de las mediciones tradicionales realizadas por los instrumentos meteorológico convencionales.
2 presentar en un mismo periodo temporal considerando dos locaciones diferentes sobre la superficie terrestre; de tal forma que se realiza una breve descripción de la evolución de la meteorología GPS a nivel internacional y nacional, con el fin de construir la base del presente proyecto, posteriormente se presenta los objetivos que se persiguen cuyo eje central consiste en la determinación y análisis del comportamiento del vapor de agua para las estaciones BOGA y TUNA del IGAC (Instituto Geográfico Agustín Codazzi ); así mismo se presenta la metodología propuesta para el desarrollo y cumplimiento de los objetivos propuestos y se exponen los resultados obtenidos.
1.2 Estado del Arte y Antecedentes
La distribución y evolución del vapor de agua es determinante en el funcionamiento climático y meteorológico de la atmosfera terrestre, siendo una de las variables climáticas de observación sistemática que actualmente ha definido el Sistema de Observación del Clima Mundial (GCOS, Global Climate Observing System) [1]. El vapor de agua, es esencial en el equilibrio térmico, desempeñando un papel importante en los cambios del tiempo y del clima, razón por la cual ha venido captando una especial atención, particularmente en las últimas tres décadas. El monitoreo y estimación del vapor de agua se está desarrollando a través de técnicas nuevas de sensores remotos con base en los sistemas satelitales de Posicionamiento Global.
La inclusión de técnicas GPS, en el estudio de factores atmosféricos como el vapor de agua se ha denominado Meteorología GPS, término que fue mencionado por primera vez por Michael Bevis [2], quien argumentó que las observaciones GPS son datos continuos y globales de los cuales es posible extraer información atmosférica; desde entonces el termino de meteorología GPS ha tenido aceptación en la comunidad científica y en las ciencias meteorológicas; la cual se refiere al uso de los efectos de la atmósfera en la propagación de las señales de radio del sistema de posicionamiento global GPS para derivar información del estado de la atmósfera en sus capas bajas.
3 se compone de una parte húmeda y una parte seca, ahora bien la componente húmeda es proporcional al vapor de agua.
El Sistema de Posicionamiento Global (GPS) es un sistema de navegación por satélite ampliamente adoptado para la posición instantánea y la velocidad de un punto en cualquier lugar de la superficie de la tierra en cualquier condición meteorológica [3], aunque en meteorología existen algunos métodos para la medición de vapor de agua, cómo el sistema de radio-sondeos, que es una técnica sistemática de medida de la distribución de vapor de agua en columna, es un método que presenta limitaciones respecto a la resolución temporal, ya que su alto costo se restringe al uso dos veces al día en el horario meteorológico: 00z y 12z, sin embargo aunque con los observables GPS se gana resolución temporal al no tener limitaciones respecto a las condiciones climáticas y al tratarse de un método de menor costo, una limitante de este es que solo se obtiene información vertical a la antena de la estación, por lo tanto esto se refleja en una baja resolución espacial.
1.2.1 Antecedentes Internacionales
Desde que se innovó con las tecnologías GPS en el campo de la meteorología, se ha generado bastante literatura en torno al estudio del vapor de agua, su estimación y medición mediante las señales GPS. Sin embargo, estos estudios han estado más concentrados en las latitudes medias que para las latitudes tropicales.
Bevis et al. (1992), en su artículo “GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System” plantean las pautas para emplear las redes GPS como un sistema de sensor remoto que permite el estudio del vapor de agua atmosférico con buena precisión gracias al estudio de la señal GPS, donde la tecnología ofrece la posibilidad de hacer seguimiento de esta variable de tiempo según su distribución espacial y con una resolución temporal de 10 minutos [2].
Bevis et al. (1994), abordan matemáticamente la conversión del retraso húmedo zenital obtenido a partir del estudio de la señal GPS en vapor de agua atmosférico, transformación que es obtenida a partir de la multiplicación del retraso húmedo zenital por un factor el cual depende de la refractividad del aire húmedo y de la temperatura media atmosférica [4].
4 mapeo de otros autores como Lanyi, (1984); Davis et al., (1985) ; Herring, (1992ª) no se encuentra en función de variables meteorológicas, por ejemplo, la función de mapeo de Herring depende de parámetros como altitud, temperatura y latitud, mientras que, la función propuesta por Niell depende del tiempo, es decir del día de observación y de la latitud del sitio de observación. Esta función de mapeo ha sido planteada para el cálculo de los retrasos troposféricos en sitios de observación en lo que no se cuenta con información meteorológica [5].
Gutman & Benjamin (2001), abordan el tema del uso de las observaciones meteorológicas con GPS como el caso del vapor de agua en modelos numéricos para la predicción del clima, de su estudio, se deduce que los datos del vapor de agua atmosférico derivados de observaciones GPS presentan un impacto positivo en previsiones de 3 horas para la humedad relativa y la precipitación [6].
Sapucci (2001), en su trabajo titulado “Estimativa do Vapor D’água Atmosférico e Avaliação da Modelagem do Atraso Zenital Troposférico Utilizando Gps” donde compara los resultados que obtuvo sobre la recuperación del vapor de agua en la atmosfera a partir del retraso troposférico húmedo con los de radiosondeos, concluye que la técnica con GPS para esta labor, resulta eficiente al obtener resultados que se aproximan a loa arrojados por radiosondeos e igualmente para el trabajo que ha realizado y en función de los datos con los que trabajo considera que emplear los modelos de Hopfield y Saastamoinen obtuvo casi los mismos resultados, teniendo en cuenta que empleo datos meteorológicos [7].
Hagemann (2003), en su trabajo, titulado “On the determination of atmospheric water vapour from GPS measurements” determina el vapor de agua atmosférico empleando la tecnología GPS y adicionalmente dedican una sección de su trabajo al tema de las incertidumbres en el cálculo de esta variable atmosférica a partir de información GPS, de tal forma que concluyen que tal incertidumbre es debida principalmente a errores en la medida de la presión superficial y que respecto a las mediciones de la temperatura media la incertidumbre resulta ser menor [8].
5 Troller et al.,(2006) , realizan un estudio en Suiza, trabajando con la red GPS AGNES (Red GPS Nacional Suiza), para el caso se calculó una distribución de 40 perfiles de vapor de agua sobre una base horaria. El enfoque se centra en los retrasos GPS de trayectoria de diferencias dobles. Aquí las grandes diferencias de altura en las estaciones GPS son adecuadas para una precisa solución tomografíca. Los datos de la red meteorológica son empleados para descomponer los retrasos en sus componentes húmeda y seca. Ellos eligieron un periodo de una semana para noviembre de 2002. En dicha semana se presentaron cambios climáticos rápidos [10].
Jade & Vijayan (2008), en su estudio obtienen mediciones precisas de vapor de agua para el terreno muy ondulado como la meseta tibetana Himalaya información que será útil para investigar las interacciones atmósfera de la tierra y su efecto sobre la circulación de los monzones de Asia en términos de fuerzas y mecanismos de retroalimentación de conducir en un futuro próximo [11].
Shoji (2009), en su trabajo acerca del estudio del vapor de agua en tiempo real empleando la red de estaciones GPS en Japón, emplea la estrategia de procesamiento el PPP (Procesamiento de Punto Preciso) y al emplear esta estrategia de procesamiento en la recuperación del vapor de agua atmosférico y contrastar dichos resultados con las mediciones de esta variable obtenida a partir de radiosondeos obtuvo diferencias cuadradas alrededor de 3.4 mm en época de verano y de 1.6 mm en época de invierno [12].
Cioce, Hoyer, Wildermann, Royero, & Díaz, (2011) en su trabajo sobre la determinación del vapor de agua troposférico, argumentan que la obtención del vapor de agua se fundamenta en el cálculo del retraso húmedo cenital ZWD, el cual depende de determinación del retraso total cenital ZTD y quitándole el componente hidrostático (ZHD) a dicho retraso, en su estudio señalan que diversos ensayos a nivel mundial han demostrado que la recuperación del vapor de agua troposférico de las observaciones GPS es efectiva, confiable y exacta, en comparación con las técnicas clásicas de la meteorología [13].
6 Seco et al., (2012) en su estudio titulado “Rain pattern analysis and forecast model based on GPS estimated atmospheric water vapor content” analizan la relación entre la ocurrencia de precipitaciones y el vapor de agua atmosférico calculado mediante tecnología GPS y trabajan un modelo que les permite predecir la precipitación de lluvia con una buena precisión hasta para 56 horas [15].
KureKar & Kuraishi, (2012), realizan un estudio de la determinación precisa de vapor de agua precipitable atmosférica utilizando la tecnología GPS que utiliza el software GAMIT GPS. Dicho estudio se llevó a cabo casi en tiempo real en la estación permanente GPS en el Instituto Indio de Tecnología de Bombay. Estimación del retraso troposférico total se llevó a cabo en un intervalo de cada 2 horas [3].
Valdés, Cano, Sánchez, & Gonzalo, (2012) realizan un estudio, cuyo objeto consiste en calcular el retraso troposférico en la mayor cantidad de estaciones posibles en el ámbito europeo. El Grupo de Interés Económico de la Red de Servicios Meteorológicos Europeo (Economic Interest Grouping of the Network of European Meteorological Services, EUMETNET EIG) creó el proyecto de determinación de vapor de agua con GNSS. (E-VAGP - GNSS water vapour programme), esto con el fin de realizar un monitoreo de tiempo continuo del vapor de agua, de tal forma que si la estimación del vapor de agua se realiza adecuadamente, estos datos pueden servir de partida para los modelos numéricos de predicción del tiempo [16].
Choy et al. (2015), argumentan en su trabajo titulado “Precipitable Water Vapor Estimates in the Australian Region from Ground-Based GPS Observations” que las estimaciones del vapor de agua precipitable dependen de la humedad en la atmosfera, la topografía y clima del sitio de observación, de tal forma que, las desviaciones son mayores en latitudes cercanas al ecuador terrestre y resultan menores para latitudes altas [17].
1.2.2 Antecedentes en Nacionales
7 montañosas a través de la refracción troposférica obtenido por GNSS, que, mediante el cálculo de un modelo troposférico, mapea la distribución de ZWD y ZTD para el territorio colombiano (Herrera P. et al., 2009 citado por [18]).
Espinal, (2012) presenta un trabajo sobre los efectos troposféricos en la señal GPS en el Suroccidente Colombiano, donde el procesamiento de los datos GPS se hace empleando software comercial, y en su trabajo al procesar los datos con el modelo de Hopfiel no se obtienen diferencias considerables respecto al procesamiento empleando el modelo de Saastamoinen, recomienda emplear el modelo de Saastamoinen dado que este no depende de la altura de la estación; recomienda además, que para se trabaje con software científico para observar el verdadero comportamiento de las variables meteorológicas en cada uno de los modelos troposféricos [19].
Šverko Navarrete, (2012), estima el vapor de agua precipitable, evaluando modelos sobre el retraso troposférico cenital explicando la influencia de la troposfera en la señal GPS para la estimación del vapor de agua precipitable (PWV) a partir de observables GPS de la estación BOGT del Servicio Geológico Colombiano (antes Ingeominas); para la estimación del PWV elaboró un modelo de temperatura media troposférica (Tm) en el cual se determina una Tm en 276K (2,85º C) en un rango de 272K (-1,15º C) a 282K (11.85º C) [18].
Aguirre & Calderon (2014) determinan el comportamiento de la troposfera en Colombia mediante el análisis del retardo troposférico total, donde analizan la variabilidad de este en diferentes estaciones durante tres años [20].
1.3 Justificación
La principal motivación para realizar el estudio del vapor de agua a través de señales GPS es debido a la carencia de un instrumento que aporte suficiente resolución para observar y cuantificar su comportamiento espacial y temporal, presentando las señales GPS como solución a este obstáculo gracias a la tendencia mundial de densificación de redes geodésicas satelitales con estaciones de recepción permanente lo que implica mayores fuentes de información para el monitoreo del vapor de agua.
8 orientados a demostrar lo eficiente que resulta aplicar esta metodología y lo significativo que son los resultados obtenidos para incluirse en modelos numéricos del clima.
La cuantificación y monitoreo del vapor de agua, así como el estudio de su comportamiento, resulta provechoso en el ámbito de la climatología al tratarse de uno de los más influyentes gases de efecto invernadero que incide en el calentamiento global, razón por la cual tecnologías como la GPS resultan convenientes para su seguimiento al ofrecer una mayor resolución temporal, lo que implica un fuente de información para la inclusión de esta variable en modelos numéricos para la predicción del clima.
El estudio del vapor de agua troposférico no solo es relevante para el mejoramiento de modelos climatológicos al actuar como regulador de la temperatura, sino que además resulta importante para el estudio del ciclo del agua.
1.4 Declaración del problema
Gracias al uso de GPS, es posible determinar automáticamente la posición (latitud y longitud) en la tierra. Funciona continuamente en todas partes del mundo y es disponible a todos libre de cargos. Con orígenes en aplicaciones militares secretas, GPS se ha convertido en parte de nuestra vida cotidiana [21]. El GPS es un sistema de posicionamiento muy común con el cual se alcanzan precisiones de menos de un metro en ciertas situaciones [22].
9
1.5 Preguntas y/o Hipótesis
Las preguntas y/o hipótesis que han permitido construir claramente el objetivo que persigue el presente proyecto se exponen a continuación.
1.5.1 Preguntas
1. ¿Qué ventajas representa la tecnología GPS en la cuantificación del vapor de agua presente en la atmosfera respecto a los métodos meteorológicos convencionales?
2. ¿Cuál es el comportamiento del vapor de agua atmosférico, en relación con la altura y la latitud de un determinado sitio?
3. ¿Por qué es importante cuantificar el vapor de agua atmosférico, empleando técnicas que ofrezcan una mayor precisión en los resultados así como una mejor resolución temporal y espacial?
1.5.2 Hipótesis
1. La tecnología GPS ofrece la posibilidad de estimar la cantidad de vapor de agua precipitable en la atmosfera de manera permanente y continua al no tener limitantes climatológicas así como su bajo costo, lo que contrasta con las técnicas meteorológicas convencionales como el radiosondeó, el radiómetro y los fotómetros, los cuales presentan limitaciones respecto a la temporalidad y la espacialidad en la toma de datos, así mismo cada país cuenta con una Red Geodésica Nacional que si está bien densificada, en este tipo de estudios ofrece una mayor resolución espacial.
2. La distribución del vapor de agua en la atmosfera varia en relación con la latitud, de tal forma que estudios han determinado que a latitudes mayores, el vapor de agua disminuye, de esto se deriva que en los polos el vapor de agua es 10 veces menor que en latitudes cercanas al Ecuador terrestre, además el vapor de agua también varía en relación con la altitud, de modo que este disminuye rápidamente a medida que la altitud aumenta, concentrándose así en la capa de la atmosfera.
10
1.6 Objetivos
1.6.1 Objetivo General
Determinar el comportamiento del vapor de agua en las estaciones BOGA y TUNA para una época seca y una época de lluvias, identificando tendencias temporales para periodos de tiempo enmarcados en épocas de precipitación.
1.6.2 Objetivos Específicos
Para conseguir el objetivo general, el proyecto se divide en los siguientes objetivos específicos:
Determinar el vapor de agua para las estaciones a partir del retraso troposférico húmedo, empleando tecnología GPS.
Examinar los patrones o tendencias que pueda presentar el comportamiento del vapor de agua.
11
CAPÍTULO II: SISTEMA DE POSICIONAMIENTO SATELITAL 2.1 Sistema Global de Navegación por Satélite - GNSS
El sistema global de navegación por satélite, también denominado GNSS por sus siglas en inglés (Global Navigation Satellite System) tiene como finalidad dar solución a la necesidad latente de los seres humanos de conocer exactamente su posición en el planeta. Es un sistema de radio navegación por satélite que proporciona posición tridimensional con precisión, navegación e información de tiempo [23]. Actualmente el sistema GNSS está compuesto por tres constelaciones de satélites artificiales, funcionales y abiertas a los usuarios: NAVSTAR-GPS GLONASS y GALILEO, y se encuentra en fase de implementación el sistema COMPASS
(conocido como Beidou) proyecto de la República Popular China; dichos sistemas han sido funcionalmente diseñados para dotar cualquier punto de posición espacial y temporal, sin dar lugar a consideración de las condiciones meteorológicas.
Para obtener un sistema de posicionamiento global continúo, es indispensable que cada constelación de satélites este dotada de suficientes satélites y orbitas, de tal forma que se garantice la observación de mínimo cuatro satélites en cualquier parte del planeta; estos sistemas de navegación permiten obtener la posición exacta de un punto a partir del trabajo de una señal formada por ondas electromagnéticas que es transmitida por los satélites artificiales, el posicionamiento preciso y la navegación fue la principal motivación de estos sistemas, sin embargo, en la actualidad gracias a diversos estudios su campo de aplicación se ha ido ampliando al ser útiles en áreas como la geodinámica, estudios ambientales, biológicos, agrícolas, fines militares, arqueológicos y meteorológicos entre otros.
12 El sistema GLONASS (Global'naya Navigatsionnaya Sputnikovaya Sistema) es una constelación de satélites artificiales desarrollada en 1970 por la Unión Soviética pero con la caída de está, se congela el proyecto y posteriormente es asumido por la Federación Rusa; diseñado bajo un sistema similar al del GPS, aunque trabaja diferente referencia de tiempo y de espacio; se constituye de 24 satélites activos que se encuentran distribuidos en 3 orbitas que se encuentran a una altura inferior a la del sistema GPS (19.100 Km de altitud sobre la superficie terrestre), permitiendo determinar la posición de un punto en casi cualquier parte del planeta, creado con propósitos militares, pero con el tiempo bajo órdenes gubernamentales se dispuso para uso de la población civil.
GALILEO es un sistema de navegación en desarrollo, planteado por la Unión Europea con el objetivo de obtener una independencia de los sistemas GPS y GLONASS. Este sistema de navegación surge de la alianza entre 27 países; a diferencia de los dos sistemas de navegación nombrados con anterioridad, este ofrecerá servicios a usuarios de diferentes áreas, es decir se enfocara en usos civiles; al finalizar la implementación del programa contara con 30 satélites y 3 orbitas a una altitud de 23.500Km de altitud, con las que se considera que para el posicionamiento en cualquier parte del planeta se tenga recepción de 3 satélites en una misma orbita y un cuarto y quinto satélite de otra orbita, inicialmente este sistema estaba programado para estar en total funcionamiento para el año 2008, sin embargo, se ha retrasado por diferencias entre los países participantes, actualmente el sistema cuenta con 8 satélites en órbita los cuales han sido lanzados de dos en dos (fechas de lanzamiento: octubre de 2011 y 2012, agosto de 2014 y marzo de 2015) y se estima que a partir del año 2020 prestara sus servicios a nivel comercial.
COMPASS o también conocido como BeiDou es un sistema de navegación que se encuentra en fase de desarrollo por parte de la República Popular China, el programa surge con la necesidad de obtener una independencia del GPS y ofrecer otra alternativa al GNSS, a partir del 2012, ofrece información de posicionamiento, navegación y calendario a China y a una parte de la región Pacifica de Asia. El 30 de marzo del 2015, el programa BeiDou lanza el primer satélite de la nueva generación, el cual tiene un significado importante en el programa, ya que es el inicio de la expansión de este programa desde la región al mundo.
13 para designar a las constelaciones GALILEO, junto con los nuevos programas de navegación que están siendo desarrollados como es el caso del COMPASS.
2.2 Descripción y principio de funcionamiento del GPS
El GPS es un sistema de radionavegación basado en satélites, constituido por 24 satélites artificiales que se distribuyen en seis planos orbitales cuya inclinación es de 55°. La idea básica del GPS, es tener al menos 4 satélites por encima del horizonte disponible las 24 horas en todas las partes de la tierra [24]. Esta constelación tiene una cobertura global permitiendo que en cualquier parte de la tierra sea posible obtener información de entre 4 y 8 satélites con una máscara de elevación de 15°. En la tabla 1, se presentan las características del Sistema de Posicionamiento Global.
Para determinar la posición de un punto, empleando la tecnología satelital se requiere de la posición y el reloj del satélite, la posición del satélite es obtenida a partir de las efemérides las cuales son los parámetros orbitales precisos de los satélites, para la obtención de la posición de un punto, se requiere de mínimo cuatro satélites, tres para obtener la posición tridimensional (X, Y, Z) y el cuarto para eliminar errores de sincronismo. El cálculo de la posición se lleva a cabo a partir de las distancias a los satélites medidas por el receptor GPS, distancia que es obtenida a partir del tiempo en que demora la señal en llegar al receptor, conociendo el tiempo de demora y bajo el hecho de que la señal viaja a la velocidad de la luz se calcula la distancia entre el satélite y el receptor. Por tanto, el principio de posicionamiento consiste en resolver una trilateración inversa en el espacio, donde conocidas las coordenadas de los satélites, se mide la distancia entre el receptor y los satélites [1].
14 Tabla 1 Características del sistema GPS
CARACTERÍSTICAS DEL SISTEMA GPS Satélite
Numero de Satélites 24
Planos orbitales 6
Satélites por plano orbital 4
Inclinación Orbital 55°
Radio Orbital 26.560 Km
Periodo Orbital (Tiempo Sideral) 12 Horas
Altitud Orbital 20.18Km
Mensaje de Navegación
Efemérides Elementos Kleperianos e interpolación coeficientes
Datum Geodésico WGS 84
Tiempo Base Sistema de Tiempo GPS
Sistema de Tiempo Relativo 𝑈𝑇𝐶[𝑈𝑆𝑁𝑂]
Transmisión Almanaque 12.5 minutos Señal
División Señal Satelital Código división
Frecuencia Banda 𝐿1 1.575MHz
Frecuencia Banda 𝐿2 1.228MHz
Códigos Diferente para todos los Satélites:
C/A-Código en 𝐿1
P-Código en 𝐿1 y 𝐿2
Tipo de Código Gold Código
Código Frecuencia C/A-Código 1.023MHz Código Frecuencia P-Código 1.023MHz
Datos Reloj Clock Offset
Frecuencia de offset y rate Tomado de: Satellite Geodesy, Seeber, G. (2003). Pág. 386.
2.3 Componentes del GPS
15 En la figura 1, se observa gráficamente como se encuentra estructurado el GPS de acuerdo los tres segmentos que le componen.
Figura 1 Representación gráfica de las componentes de GPS1.
El segmento espacial hace referencia a la señal que es emitida por los satélites de la constelación; en el segmento de control se recibe la señal y se envían las correcciones a los satélites y finalmente el segmento usuario calcula la posición a partir de la información suministrada por el segmento espacial.
En la tabla 2 se exponen las funciones y productos de los componentes del GPS.
Tabla 2 Funciones y Productos de los Componentes de GPS
Segmento Entrada Función Producto
Espacial Mensaje de navegación Generar y transmitir código y fases portadora, mensaje de navegación.
P-Código, C/A-Código, fases portadoras 𝐿1 y 𝐿2,
mensaje de navegación. Control P-Código, Observaciones,
Tiempo (UTC)
Produce tiempo GPS, efemérides, manejo de vehículos espaciales.
Mensaje de navegación
Usuario Código y observaciones fases portadoras, mensaje de navegación
Solución de navegación, posicionamiento relativo, etc.
Posición, velocidad y tiempo.
Fuente: Leik [35], A. GPS Satellite Survegin, II Ed.
16 El GPS, gracias a su proceso evolutivo es la herramienta principal en el posicionamiento geodésico, de acuerdo con esto, a continuación se exponen los tres segmentos que componen este sistema de navegación.
2.3.1 Segmento Espacial
El segmento espacial2 GPS consta de una constelación de satélites que transmiten señales de
radio a los usuarios. Esta constelación consta de 24 satélites distribuidos uniformemente en seis en orbitas casi circulares con un semieje mayor de 26.600Km y a una altitud de 20.200 Km, lo que se traduce en un periodo orbital de 12 horas en tiempo sideral, dichas orbitas se encuentran a una inclinación de 55°; esta estructura garantiza la observación de mínimo 4 satélites en casi cualquier parte de la tierra y en cualquier instante de tiempo, el tiempo estimado de vida útil de estos es de 7.5 años.
Este segmento se compone de satélites de navegación y de comunicación, los primeros orbitan alrededor de la tierra y los segundos denominados de aumento se utilizan para realizar las correcciones de errores del sistema, los satélites de aumento son empleados para dar obertura cuando alguno de los satélites se avería o cuando se encuentran en mantenimiento, estos pueden ayudar a mejorar el rendimiento del sistema, sin embargo estos no se consideran parte de la constelación.
Figura 2Constelación GPS3
2 Definición tomada de: http://www.gps.gov/systems/gps/space/
17 La constelación GPS está conformada por satélites antiguos y nuevos, sin embargo, se ha venido trabajando en una modernización del sistema, por lo tanto se tienen satélites de generaciones actuales y futuras, GPS cuenta con 5 bloques de satélites que son: Bloque IIA (avanzada), Bloque IIR (reposición), Bloque IIR (M) (modernización), Bloque IIF y el GPS III; de estos bloques de satélites cuatro se encuentran operativos y el GPS III actualmente se encuentra en fase de producción.
Los satélites del Bloque IIA lanzados entre los años 1990 y 1997, cuentan con código de adquisición C/A en la frecuencia 𝐿1 para usuarios civiles, se cuenta con un código P (código preciso) en las frecuencias 𝐿1 y 𝐿2 para usuarios militares, el tiempo estimado de vida útil de este
bloque de satélites es de 7.5 años; los satélites del Bloque IIR lanzados entre los años 1997 y 2004 cuentan con las mismas características que los del Bloque IIA, pero adicionalmente cuentan abordo con un reloj de monitoreo. Los satélites de los Bloques IIA y IIR hacen parte de los denominados satélites de legado.
Los satélites del Bloque IIR (M) lanzados entre los años 2005 y 2009, cuentan con las mismas señales de los del bloque IIR, adicionalmente cuenta con una señal civil en 𝐿2𝐶, y nuevas
señales de código militar; por su parte los satélites del Bloque IIF lanzados desde el años 2010, heredan las señales de los satélites del Bloque IIR (M), adicionalmente contienen relojes atómicos, se mejora la precisión, la calidad y la intensidad de la señal, se adiciona una tercera señal de uso civil 𝐿5, y se extiende su periodo de vida útil a 12 años.
El bloque de satélites GPS III se encuentra actualmente en producción y se espera que el lanzamiento de estos satélites se lleve a cabo a partir del año 2016, heredan las señales del Bloque IIF, permitirán tener una mayor fiabilidad de la señal al ser mejorada, tendrán además reflectores laser de búsqueda y rescate de carga útil, los satélites de este bloque tendrán una vida útil de 15 años.
18 2.3.2 Segmento Control
El segmento de control, es el que se encarga del correcto funcionamiento de la constelación, para esto, desde este segmento se realizan una serie de funciones las cuales son (Russel, Haibly, 1980; Misra, Enge, 2001, citado por [23]):
Supervisar y controlar el sistema de satélites de forma continua.
Determinar la hora del sistema GPS.
Predecir las efemérides y el comportamiento de los relojes de los satélites.
Actualizar periódicamente el mensaje de navegación para cada satélite.
Mantener las órbitas y sustituirlas cuando alguna de estas se traslada o no cumple con las condiciones requeridas.
En la figura 3, se observa gráficamente como está constituido el segmento de control.
Figura 3Segmento Control GPS4
El segmento de control, se encuentra instalado en tierra, consiste pues en una red global que permite realizar seguimiento y control a los satélites de la constelación; actualmente este segmento cuenta con 30 estaciones en tierra, entre las cuales se tienen: una estación de control principal la cual se encuentra instalada en el Estado de Colorado (USA), una estación de control maestro suplente que se encuentra en el Estado de California (USA), y un restante de 28 estaciones que se encuentran distribuidas sobre la tierra de las cuales 12 corresponden a estaciones de mando y control de antenas y 16 a sitios de monitoreo.
19 La estación de control principal se encarga de determinar la posición exacta de los satélites a partir de la información de navegación que recibe de las estaciones de monitoreo, posteriormente carga esos datos al satélite, además genera los archivos y mensajes de navegación y se encarga de la seguridad de la constelación. Las estaciones de monitoreo rastrean los satélites, reciben información atmosférica, las señales de navegación. Las observaciones que estas estaciones reciben son enviadas a la estación de control principal en Colorado (USA). Las estaciones de mando y control de antenas permiten la comunicación con los satélites.
2.3.3 Segmento Usuario
El segmento usuario, hace referencia a los diferentes receptores que reciben la señal que es emitida por los satélites GPS, estos receptores además de recibir la señal la procesan para obtener la posición tridimensional y la hora, actualmente el GPS, es empleado en diferentes áreas y esto se debe a que este sistema ofrece un fácil acceso al usuario y a un costo bajo teniendo un amplio campo de aplicación como en la topografía y cartografía, la navegación marítima, la aviación, la agricultura, medio ambiente, seguridad pública y socorro en casos de desastre, entre otros.
2.4 La señal GPS
La señal GPS, es emitida en dos frecuencias 1575.42MHz denominada 𝐿1 y 1227.60MHz
conocidas 𝐿2 las cuales se derivan de una frecuencia fundamental 𝑓0 de 10.23MHz (𝐿1 y 𝐿2 son el resultado de multiplicar la frecuencia fundamental 𝑓0 por 154 para 𝐿1 y 120 para 𝐿2 ), estas
frecuencias son generadas en la banda L dado que permite reducir o hacer casi nulos los efectos producidos por la ionósfera, la cual es un medio que afecta la velocidad de propagación de la señal. Estas frecuencias por si solas no transmiten ninguna información, así, que con el fin de que el usuario pueda obtener una posición estas portadoras son moduladas con códigos y mensajes codificados que son los que en realidad contienen la información.
20 pseudoaleatorio denominado PRN5 el cual es un código único para cada satélite; se emplea una
modulación bifásica binaria dado que el código PRN y el mensaje tienen una secuencia binaria, esto implica que en la modulación se tienen únicamente dos valores, +1 y -1 que lo que describen o transmiten es un cambio en la fase, los que se obtiene es:
(+1): La amplitud de la onda se deja como esta.
(-1): Se desfasa la onda 180°.
Figura 4Modulación de la portadora.6
A continuación se describirán cada uno de los códigos que contienen las señales GPS, en el presente documento se entrara en detalle en los códigos C/A, Y, P y el mensaje de navegación; sin embargo resulta importante mencionar que el código 𝐿2𝐶 el cual es de su civil contiene dos códigos PRN y la señal 𝐿5 emite también dos códigos.
El código C/A, denominado código de Adquisición (Course Adquition-Code en inglés), es un código de menos precisión el cual esta modulado en la señal 𝐿1 , este código es una secuencia de 1023 dígitos binarios o también denominados chip y se repite cada milisegundo. Cada satélite tiene un único código C/A razón por la cual este código es útil en la identificación de cada satélite. La longitud de onda de este código es de 300 metros que es a lo que equivale un microsegundo en unidad de distancia.
El código P o código de precisión (Precise Code en inglés), es un código más complejo y mucho más preciso que el código C/A, es modulado en ambas señales 𝐿1 y 𝐿2, la longitud de onda de los chips este código es de 30 metros es decir es 10 veces menor que la del código C/A, e
5 El código PRN así denominado por su sigla en inglés Pseudorandom – noise, Estos códigos son una secuencia
de valores binarios, este es aparentemente formado de manera aleatoria, sin embargo, para conformar este código se trabaja con un algoritmo denominado secuencia de registros retroalimentadores que genera secuencias pseudoaleatorias.
6 Tomado de: Análisis y predicción de lluvias intensas en la Comunidad Valenciana basados en la estimación
21 igualmente es 10 veces más preciso que el código C/A, este código es una secuencia binaria demasiado larga, la secuencia de estos chips se repite cada 266 días, sin embardo, semanalmente cada satélite tiene asignado un segmento de este código y este es reinicializado a las 00:00 horas del Domingo.
El código P puede estar encriptado con un código Y, a esto se le conoce como Anti-Spoofing (AS), esto surge con el fin de inhabilitar a usuarios no autorizados que interfieran con la señal militar, por lo tanto el Anti-Spoofing es un procedimiento en el que se combina el código P con un código W, dicho procedimiento fue realizado por el Departamento de Defensa de los Estado Unidos. El 31 de enero de 1994 a las 00:00 UTC este código deja de ser secreto.
El mensaje de navegación, también conocido como mensaje de difusión es transmitido por cada satélite, es modulado en ambas portadoras (𝐿1 y 𝐿2) a 50 bits por segundo, este contiene información como: la información orbital del satélite (efemérides), el deslazamiento del reloj en tiempo GPS, el estado del satélite (Salud), el rango de exactitud que se espera de las mediciones, los coeficientes del modelo ionosférico, los datos de almanaque. Las efemérides, que son la información orbital del satélite son esenciales en el cálculo de la posición.
2.5 Los Observables GPS
Para obtener la posición de un punto, la clave en el sistema GPS se centra en la distancia que se encuentra entre el satélite y el receptor, los observables GPS son medidas que se derivan de dicha distancia, las cuales son obtenidas de medidas de tiempo o por diferencias de fase. GPS utiliza un “concepto” en donde se utilizan dos relojes, es decir uno en el satélite y uno en el receptor. Por lo tanto los intervalos están sesgados por errores del reloj y el satélite [25]. El observable GPS es el tiempo que tarda en llegar la señal al centro de la antena del receptor desde el centro de la antena del satélite que la emite.
A continuación se procede a realizar una breve explicación de los observables GPS. 2.5.1 Pseudorangos
22 del reloj del satélite como las del receptor e igualmente se ha de tener en cuenta los retrasos de los relojes en referencia al tiempo GPS, de tal forma que se tiene7:
S S
R R
S
R t t GPS t GPS
t
t
( ) ( )
t(GPS) (2.1) Dónde:
S
t corresponde con la lectura del reloj del satélite en el tiempo de emisión.
tR, corresponde con la lectura del reloj del receptor en el tiempo de recepción de la señal.
Sy
R
, corresponde a los retrasos de los relojes del satélite y del receptor respecto al tiempo GPS.
t, corresponde con la diferencia de lectura de los relojes del satélite y del receptor.
, corresponde con la diferencia de retrasos de los relojes.
Los errores del reloj del satélite pueden ser modelados mediante un polinomio que contiene coeficientes correspondientes a la primera parte del mensaje de navegación, al realizar este procedimiento, se tendrá únicamente el error del reloj del receptor. Ahora bien, la distanciaR, entre el satélite y el receptor es obtenida a partir de la multiplicación del intervalo de tiempo t
por la velocidad de la luz c, como se observa en la ecuación (2.2), donde el término es determinado a partir del tiempo de viaje de la señal.
Rct ct(GPS)c c (2.2)
Es importante mencionar que esta ecuación de la pseudodistancia puede llegar a ser más general, teniendo en cuenta que la señal se ve afectada en su paso por la ionosfera y la troposfera, por lo que la ecuación (2.2) se le adicionaran términos correspondientes al retraso ionosferico y al retraso troposférico, de igual manera se puede considerar el efecto multipath8 así como errores
instrumentales, considerar tales factores que afectan la señal en su viaje del satélite al receptor es relevante, puesto que la omisión de estos se traduce en una medida de pseudodistancia más grande.
7 Las ecuaciones de pseudorangos han sido tomadas de: GPS Theory and Practice. W. Hofmann & H.
Lichtenegger.
8 El Efecto multipath o multitrayectoria es un fenómeno de interferencia en el que la señal emitida por el
23 2.5.2 Pseudorangos de Fase
En los pseudorangos de fase la medida de la distancia es obtenida a partir de una comparación de la fase de la portadora recibida del satélite con la fase de referencia que es generada por el receptor, para esto se tiene en cuenta la longitud de onda de la portadora y la fase; para la medición de la distancia la fase se puede multiplicar por la longitud de onda, la medición por fase de la distancia es más precisa, sin embargo, esta es ambigua. Solo una fracción de la fase portadora puede medirse cuando la señal del satélite es adquirida, es decir un número entero N de ciclos completo es desconocido. N se llama a la ambigüedad de la fase portadora [26].
La ecuación (2.3) corresponde con el pseudorango de fase. c N
1
(2.3)
Dónde:
, pseudorango de fase.
, es la longitud de la onda.
, representa el rango de distancia entre la época de emisión t del satélite y la época de recepción ttdel receptor.
c, la velocidad de la luz.
S
R
, errores de los relojes.
N , número entero de longitudes de onda.
El signo es arbitrario, dado que este depende del receptor, puesto que es en este donde se genera el ritmo de fase y ha de tenerse en cuenta que se cuenta con diferentes t5ipos de receptores.
2.5.3 Datos Doppler
24
c
D (2.4)
2.5.4 RINEX
RINEX es la sigla en inglés de “The Receiver INdependent EXchange” (formato independiente de intercambio de receptores), este es un formato de ficheros estandarizado de textos destinados a almacenar la información proporcionada por los sistemas GNSS como GPS, GLONAS, GALILEO, EGNOS.
El formato RINEX surge por la necesidad de un formato estandarizado con el cual trabajar la información de los receptores, puesto que en principio cada fabricante de receptores tenía su propio formato lo que dificultaba el procesamiento de los datos provenientes de algunos tipos de receptores, el desarrollo del RINEX fue propuesto por la Universidad de Berna, Suiza, en el Quinto Simposio Internacional sobre Posicionamiento Geodésico Satelital, donde se determinó además que este debería ser adoptado a nivel internacional, convirtiéndose así este formato en una interfaz entre los diferentes tipos de receptores y los diversos software de procesamientos de datos. El formato consta de tres tipos de archivos ASCII:
Datos de observación.
Datos de navegación.
Datos meteorológicos.
Los archivos de observación contienen la información referente a los pseudorangos o pseudodistancias, los archivos de navegación contiene la información orbital del satélite (efemérides), el deslazamiento del reloj en tiempo GPS, el estado del satélite (Salud) y los archivos meteorológicos contienen la información meteorológica del sitio de observación.
Un RINEX se compone de dos secciones la primera es el encabezado y la segunda es el cuerpo; el encabezado contiene información referente a la posición relativa, la fecha, el tipo de antena la entidad y el software, mientras que el cuerpo contiene los pseudorangos los cuales se encuentran fragmentados por intervalos de tiempo.
25 Figura 5Nombre de un archivo RINEX9
9 Tomado de: Gurtner [36], W. (2007): RINEX:The Receiver Independent Exchange Format Version
26
CAPITULO III: LA ATMOSFERA Y LA REFRACCIÓN ATMOSFÉRICA 3.1 La Atmósfera
La atmósfera, de acuerdo con la definición adoptada por el IDEAM (Instituto de Hidrología, Meteorología y Estudios Ambientales), “Es el componente vital del ambiente humano y altera la energía solar que controla el clima; actúa como escudo protector contra los impactos de meteoritos y la radiación penetrante, sustenta las diversas actividades bióticas”. En términos más técnicos, la atmósfera es la capa de gases (constituida por 78.08% de nitrógeno y 20.95% de oxigeno) que rodea la tierra siendo la parte más externa de esta, dicha capa está formada por diferentes capas de distintas características respecto a su composición y comportamiento. Esta capa gaseosa por efecto de la fuerza de gravedad es más densa sobre la superficie terrestre y a medida que la altura va aumentando decrece su densidad, fenómeno que se cumple igualmente con la presión la cual decrece con la altura casi en la misma proporción que la densidad.
Uno de los fenómenos que acapara gran interés e importancia son los gases de efecto invernadero fundamentales en la termodinámica de la atmósfera al absorber gran parte de la radiación terrestre, lo que se traduce en un aumento de la temperatura en el planeta, donde la temperatura de equilibrio T0 ya no es cero, sino, que es superior. El vapor de agua es el principal gas de efecto invernadero caracterizado por ser variable en tiempo y espacio; en esta además se encuentran aerosoles provenientes de fuentes naturales y antropogénicas, y gases por reacción que se producen a partir de los ciclos del azufre, del nitrógeno y del cloro los cuales desempeñan un papel fundamental en la destrucción del ozono y la precipitación acida.
27 temperatura del aire, de tal forma que en verano por ejemplo el contenido de este gas es mayor en latitudes bajas. En la variación de la atmósfera respecto al tiempo el dióxido de carbono demanda una gran atención puesto que su variación en el largo plazo implica efectos en el balance de la radiación, y con el tiempo el contenido de este ha ido en aumento como consecuencia de la quema y consumo de combustibles fósiles y otras actividades, la importancia en la variación de este elemento es que presenta un impacto en la temperatura; para el caso del ozono su variación puede darse como consecuencia del calentamiento en la atmósfera y la disminución de este en la estratosfera tiene impactos negativos directos en el ser humano al provocar un daño en las células vivas y en la piel.
La atmósfera se divide en capas en función de sus características, de tal forma que respecto a su distribución térmica está compuesta por: la troposfera, la estratosfera, mesosfera, y termosfera; mientras que debido a su composición fisicoquímica está clasificada en: Homosfera, ozonosfera, ionosfera y pronosfera; en lo referente al campo magnético se divide en dinamosfera y magnetosfera; por su densidad electrónica en neutrosfera e ionosfera y respecto a la propagación de las señales electromagnéticas que es el área que compete al presente proyecto se divide en troposfera e ionosfera y sobre cuyas refracciones se entrara en detalle más adelante. La división de esta por su distribución térmica es sumamente importante dado a que los procesos térmicos que en esta acontecen permiten el estudio de la energía calórica y la energía mecánica, en esta además se presentan procesos termodinámicos10 que tiene lugar en fenómenos meteorológicos
como la formación de las nubes y la precipitación razón por la cual, en el presente capítulo se ha abordado brevemente las capas atmosféricas con base en esta clasificación. En la figura 6 se observa la variación de la temperatura acorde a la división térmica de la atmósfera.
10 Procesos adiabáticos y pseudo-adiabáticos el primero es un proceso de calentamiento o enfriamiento de un
28 Figura 6 Variación de la Temperatura en la Atmósfera11
La troposfera constituye la parte más baja de la atmósfera, se extiende desde la superficie de la tierra hasta una altura máxima de 20 km; el espesor de esta capa varía en función de la latitud y de la estación del año, de tal forma que su espesor es mayor en verano y en latitudes cercanas al Ecuador Terrestre, efecto que se debe a la fuerza centrífuga del movimiento de rotación terrestre, inversamente este es menor en los polos y en relación a la estación del año en invierno. La troposfera es la capa más superficial con un espesor promedio de aproximadamente 12 Km. Posee una alta concentración de sustancias gaseosas como nitrógeno, oxigeno, dióxido de carbono, vapor de agua, entre otros gases; conteniendo aproximadamente el 70% de la masa total de la atmósfera y en ella ocurren la mayoría de fenómenos meteorológicos [7]. Esta contiene prácticamente todo el vapor de agua y aerosoles, la temperatura en esta capa disminuye con la altura a una velocidad entre 6 y 7 °C; la troposfera es la capa de la atmósfera donde tienen lugar diferentes fenómenos climáticos, es el caso de las nubes y las precipitaciones, las cuales se forman en la tropopausa que es el límite superior de esta capa cuya altura no es constante en tiempo y espacio.
La estratosfera es la capa de la atmosfera que se extiende desde la tropopausa hasta unos 50 kilómetros de altura, en esta ocurre lo inverso a la troposfera, pues aquí la temperatura aumenta
11 Tomado de: Meteorología y Clima. M.C. Casas & M. Alarcón. Pág. 14.
29 conforme aumenta la altura, este aumento en la temperatura ocurre debido a la absorción de rayos ultravioleta, sin embargo ha de tenerse en cuenta que en principio el aumento de la temperatura es lento contiene aproximadamente el 25% de la masa total del aire, y en ella se encuentra el 90% de ozono, el cual se concentra entre los 15 y 35 kilómetros de altura y es mayor en regiones tropicales y menor cerca a los polos.
La mesosfera es la capa atmosférica que se encuentra entre los 50 y 90 kilómetros de altitud, en esta capa la temperatura al igual que en la troposfera disminuye con la altitud, pero en este caso este fenómeno se debe a la poca absorción solar y a la emisión infrarroja del dióxido de carbono, en esta capa la presión es muy baja.
La termosfera es la capa atmosférica que se encuentra a partir de los 80 o 90 kilómetros, la temperatura al igual que en la estratosfera aumenta con la altitud debido a la absorción de radiación ultravioleta y la densidad atmosférica es muy baja, a partir de los 200 kilómetros de altitud, la temperatura depende en gran medida de la actividad solar.
3.2 Efectos Atmosféricos en la Señal GPS
La señal GPS en su viaje del satélite al receptor atraviesa la atmósfera, por lo cual esta ha de atravesar diferentes medios o capas, en este viaje, la señal se ve influenciada negativamente principalmente en su paso por la ionosfera y por la troposfera produciéndose allí una fuente de error en la señal denominados retrasos atmosféricos y propiamente retraso ionosférico y retraso troposférico, los cuales si no son tratados debidamente en el posicionamiento generan incertidumbre en el cálculo de coordenadas.
30 corregido fácilmente a partir de la combinación lineal de las frecuencias, este se da por los electrones libres que se encuentran en esta capa atmosférica, como se verá más adelante. En la figura 7, se observa la refracción atmosférica de la señal GPS.
Figura 7 Refracción Atmosférica de la Señal GPS12
3.2.1 Retraso Ionosférico
El retraso ionosférico no es más que la demora que experimenta la señal al atravesar la ionosfera esta se encuentra situada entre los 70 y 1000 kilómetros, en esta capa como efecto de la radiación solar y ultravioleta algunas moléculas gaseosas se ionizan de tal forma que se liberan electrones, se caracteriza además por ser un medio dispersivo lo que implica que la propagación de la onda electromagnética depende de la frecuencia. En un medio dispersivo la refractividad depende de la frecuencia o la longitud de onda. El efecto de dispersión es causada por interacciones electromagnéticas entre el campo cargado eléctricamente y el medio externo que la onda penetra [25].
En esta capa la propagación de la señal se ve afectada por la radiación solar en latitudes altas y cercanas al ecuador geomagnético, en pocas palabras los electrones libres presentes en esta capa atmosférica influyen en la propagación de la señal y como consecuencia de este fenómeno
12 Tomado de: Cioce, V. (2009). Aplicación De Observaciones GPS Para La Cuantificación Del Vapor De
31 se obtienen pseudodistancias de código que exceden la distancia geométrica y medidas de fase más cortas que esta.
Para entender el efecto producido por la ionosfera en la señal GPS, es importante tener en cuenta, que está al ser un medio dispersivo se presentan dos tipos de velocidades, la velocidad de fase (vph) y la velocidad de grupo (vgr); la primera es la propagación de una onda con longitud de onda y frecuencia f , mientras que la velocidad de grupo se remite a las ondas con frecuencias un poco diferentes.
Ahora bien, el índice de refracción de una onda simple (fase) esta descrito por (3.1), y de este se deriva el índice de refracción en grupo como se muestra en (3.213).
1 22
f c
nph (3.1)
1 22 2 32 1 22
f c f c f f c df dn f n
ngr ph ph (3.2)
Como se observa en (3.2) la refracción en grupo corresponde con la refracción de fase más la diferenciación de la misma, de acuerdo con Seeber (2003) [23], el coeficiente c2, tiene un valor
aproximado de 40.3Ne, por otro lado nph y ngr, corresponden con la refracción en fase y grupo
respectivamente. Los retrasos ionosféricos considerando la distancia entre el satélite y el receptor se expresan algebraicamente en (3.3).
2 0 2 ds
f c
Iono ph
2 0
2 ds
f c
Iono gr
(3.3)
Los retrasos ionosféricos descritos en (3.3), pueden ser reescritos reemplazando el coeficiente c2 de la siguiente manera:
TEC f Iono ph 2 3 . 40
TEC
f Iono gr 2 3 . 40
(3.4)
En la ecuación (3.4) el término TEC, hace referencia al contenido total de electrones
N ds0
TEC e . Para corregir el efecto ionosférico en la señal se puede recurrir a un modelo ionosférico,
a una combinación de libre ionosfera o a la medición del TEC; la combinación de libre ionosfera se realiza al tener observaciones en más de una frecuencia y empleando una combinación correcta, esta solución permite eliminar en su mayoría el retraso ionosférico que sufre la señal GPS.
13 Las expresiones matemáticas referentes al efecto ionosférico han sido tomadas de Hofmann, Lichtenegger,
32 3.2.2 Retraso Troposférico
Como se abordó ya en la sección 3.1, la troposfera o también denominada atmósfera neutra es la capa atmosférica más baja y la cual contiene cerca del 70% de la masa de la atmosfera y cuyo espesor está determinado por la tropopausa; que está constituida como el límite inferior de la estratosfera.
La troposfera es la región donde la propagación de la señal es influenciada por el contenido de vapor de agua y de la temperatura; en está la refracción se encuentra en función de la temperatura, la presión superficial y el vapor de agua, ha de tenerse en cuenta que está no es un medio dispersivo, razón por la cual la propagación de las ondas en este medio es independiente de la frecuencia, lo que implica que no es posible corregir este efecto a partir de las frecuencias de las portadoras L1 y L2 como es habitual en el efecto producido por la ionosfera. El efecto que la atmósfera neutra produce en la señal es más pequeño y de carácter más local que el de la ionosfera, esto debido a que como se ha mencionado ya, su propagación no de pende de la frecuencia y por esta razón este efecto debe ser modelado.
El retraso troposférico, se divide en componente hidrostática y componente húmeda, donde el retraso hidrostático es causado por gases inertes en la atmósfera como el oxígeno y el nitrógeno, así mismo, a este se le atribuye el 90% del retraso troposférico total y puede ser obtenido a partir de medidas de presión en superficie; es más viable modelar la componente hidrostática debido a que es estable, por su parte el retraso húmedo depende del vapor de agua que se encuentra a lo largo del recorrido de la señal y al depender de esto, esté es variable en el tiempo. Para reducir el efecto de la troposfera en la señal, se requiere emplear modelos como los de Holfield y de Saastamoinen los cuales requieren de variables atmosféricas que pueden ser obtenidas a partir de modelos atmosféricos como el SA (Standar Atmosphere), el GPT (Global Pressure and Temperature) o el MOPS (Minimal Operation Performance System); además se requiere del uso de funciones de mapeo o de proyección como las de Niell o Herring.
La ecuación (3.5) corresponde a la definición matemática de la refracción troposférica ([25], Pág. 106), esta corresponde a una aproximación, considerando que la integración se realiza a lo largo de la trayectoria de la señal, el ndescrito en esta fórmula hace referencia al índice de refracción.
Trop