DISE ˜
NO E IMPLEMENTACI ´
ON DE UNA ESTACI ´
ON
REMOTA PARA EL DESARROLLO DE PRACTICAS DE
LABORATORIO DE CONTROL
Pablo Emilio Narv´
aez Ortiz
Joel Mateo Moreno Quintero
Universidad Distrital Francisco Jos´
e de Caldas
Facultad de Ingenier´ıa
Proyecto Curricular de Ingenier´ıa Electr´onica
Bogot´a D.C.
DISE ˜
NO E IMPLEMENTACI ´
ON DE UNA ESTACI ´
ON
REMOTA PARA EL DESARROLLO DE PRACTICAS DE
LABORATORIO DE CONTROL
Pablo Emilio Narv´aez Ortiz C´odigo: 20092005022
Joel Mateo Moreno Quintero C´odigo: 20101005088
Trabajo de grado para optar al t´ıtulo de:
Ingeniero Electr´onico en la modalidad de investigaci´on
Directora:
Diana Marcela Ovalle Mart´ınez. PhD.
L´ınea de Investigaci´on:
Se˜nales y Control
Grupo de Investigaci´on:
IDEAS
Universidad Distrital Francisco Jos´e de Caldas
Facultad de Ingenier´ıa
Proyecto Curricular de Ingenier´ıa Electr´onica
Bogot´a D.C.
Agradecimientos
Primero y antes que todo, agradecer a Dios que nos dio las fuerzas necesarias para afrontar
este gran reto, y darle culminaci´on a cinco a˜nos de estudio en donde se presentaron
dificul-tades, pero tambi´en logros con alegr´ıas.
A nuestros familiares que supieron entender y apoyar tantos esfuerzos, d´andonos valor en
cada paso que d´abamos en esta etapa de formaci´on profesional.
A nuestros compa˜neros y amigos, quienes fueron soporte y compa˜n´ıa durante largas horas
de trabajo, y con los cuales compartimos tantas cosas y momentos especiales.
A nuestra Directora la Doctora Diana Marcela Ovalle, que nos brindo esta oportunidad de
trabajar a su lado, y que mas que nuestra directora se convirti´o en una amiga de la cual
aprendimos muchas cosas durante estos ´ultimos dos a˜nos.
Por ultimo a la Universidad Distrital, lugar que nos form´o, no solo como profesionales si no
como personas, y en donde conocimos docentes y compa˜neros excepcionales.
Resumen
El proyecto de investigaci´on estaba enfocado en desarrollar una herramienta para la
comuni-dad acad´emica que permitiera realizar practicas de laboratorio de control de manera remota,
con el fin de mejorar el m´etodo de aprendizaje en esta ´area y facilitar el acceso a la
pobla-ci´on acad´emica, tanto docentes como estudiantes a la experimentaci´on practica en el ´area
de automatizaci´on y control.
Esta herramienta se desarrollo principalmente en el dise˜no y construcci´on de la estaci´on
remota, la cual permiti´o que un usuario con acceso a Internet pudiera configurar pruebas,
y visualizar y extraer los resultados obtenidos en tiempo real gracias a la integraci´on de
prototipos de sistemas din´amicos dirigidos por un sistema embebido que se comunica a su
vez con un servidor local que le permite la conexi´on a la red de Internet y de esta manera
por medio de una pagina web la interacci´on con el usuario.
Este trabajo permite al usuario final, la configuraci´on de par´ametros espec´ıficos de
mane-ra exacta y r´apida, la posibilidad de minimizar los errores cometidos al momento de la
experimentaci´on tradicional ,y la capacidad de extraer informaci´on fundamental para su
aprendizaje en control, sin la necesidad de que tenga que perder tiempo en labores de
cons-trucci´on y adecuaci´on del prototipo que no son propias del ´area.
Otra de las ventajas ofrecidas por el desarrollo de esta estaci´on remota, es que se elimina
la limitante dada por los elementos de medici´on, los cuales el estudiante no siempre tiene a
su disposici´on, o simplemente no son suficientes debido a sus limitantes t´ecnicas las cuales
no le permiten mediciones en grandes intervalos de tiempo o no admiten la extracci´on de la
informaci´on para su posterior an´alisis.
El desarrollo de este trabajo ademas de ofrecer una herramienta para la experimentaci´on a
distancia, abre un camino para nuevos m´etodos de ense˜nanza, con la posibilidad de
aprendi-zaje sin limites de distancia y tiempo. Abriendo la posibilidad de generar nuevos desarrollos
Contenido
Resumen IX
Lista de Figuras XIII
Lista de Tablas XVII
Introducci´on 1
Objetivos 3
Justificaci´on 4
1. Funcionamiento de los sistemas din´amicos, identificaci´on y caracterizaci´on
de las Plantas 5
1.1. Descripci´on T´ecnica de la Planta T´ermica . . . 5
1.2. Descripci´on Planta de Velocidad . . . 8
1.3. Identificaci´on y caracterizaci´on de las Plantas . . . 9
1.3.1. Caracterizaci´on e identificaci´on de la planta de temperatura . . . 10
1.3.2. Caracterizaci´on de la planta de velocidad . . . 12
2. Adquisici´on de datos y Acondicionamiento de se˜nal 15 2.1. Adquisici´on y Envi´o de datos . . . 15
2.1.1. Selecci´on del sistema embebido . . . 16
2.1.2. Entorno de Desarrollo y Consideraciones de Implementaci´on . . . 18
2.1.3. Desarrollo de los Programas para Sistema T´ermico y de Velocidad . . 19
2.1.4. Respuesta al escal´on . . . 20
2.1.5. Respuesta en frecuencia . . . 22
2.1.6. Controlador On Off . . . 24
2.1.7. Controlador Digital . . . 27
2.2. Acondicionamiento de se˜nal . . . 29
xii CONTENIDO
2.2.2. Dise˜no de acondicionamiento para entrada y salida de la planta de
temperatura . . . 37
2.2.3. Circuito y PCB del bloque de acondicionamiento de entrada y salida de las plantas de velocidad y temperatura. . . 41
3. Arquitectura de Comunicaci´on 44 3.1. Comunicaci´on Planta – Acondicionamiento de Se˜nal – Microcontrolador . . . 45
3.2. Comunicaci´on Microcontrolador-Computador Servidor Local . . . 45
3.2.1. Protocolo de Comunicaci´on Serial As´ıncrono - Microcontrolador y Ser-vidor Local . . . 46
3.3. Protocolos de Comunicaci´on de Internet, Websockets y PubNub . . . 47
3.3.1. PubNub . . . 49
3.4. Comunicaci´on Computador Local – Internet – Servidor web . . . 50
3.5. Comunicaci´on Computador cliente – Servidor Aplicaci´on web - Base de datos mySQL . . . 50
4. Interface Gr´afica de Usuario 52 4.1. Elecci´on del tipo de interface gr´afica de usuario . . . 52
4.2. Desarrollo de la pagina web . . . 55
4.3. Funcionalidades principales de la p´agina web . . . 57
4.3.1. Recepci´on de informaci´on de las plantas de velocidad y temperatura . 57 4.3.2. Env´ıo de informaci´on hacia las plantas de velocidad y temperatura . 58 4.3.3. Gesti´on de acceso a las plantas de velocidad y temperatura . . . 62
5. Resultados 66 5.1. Resultados Planta de Velocidad . . . 66
5.1.1. Resultados Prueba Respuesta al Escal´on . . . 66
5.1.2. Resultados Prueba Respuesta en Frecuencia . . . 70
5.1.3. Resultados Prueba Controlador ON-OFF . . . 71
5.1.4. Resultados Prueba Controlador Digital . . . 72
5.2. Resultados Planta de Temperatura . . . 74
5.2.1. Resultados Prueba Respuesta al Escal´on . . . 74
5.2.2. Resultados Prueba Controlador ON-OFF . . . 76
5.2.3. Resultados Prueba Controlador Digital . . . 77
5.3. An´alisis de Resultados . . . 79
5.3.1. An´alisis de Resultados Planta de Velocidad . . . 79
5.3.2. An´alisis de Resultados Planta de Temperatura . . . 80
6. Conclusiones, Recomendaciones y Trabajos Futuros 82
Lista de Figuras
1-1. Plantas de Velocidad y Temperatura. . . 6
1-2. Etapa de potencia. . . 6
1-3. Etapa de acondicionamiento. . . 7
1-4. Etapa de protecci´on de la salida en caso de corto circuito. . . 7
1-5. Circuito de potencia para motor. . . 8
1-6. Linealizaci´on de datos obtenidos a respuesta de escal´on de 5.8 V. . . 11
1-7. Linealizaci´on de datos obtenidos a respuesta de escal´on de 7 V. . . 11
1-8. Linealizaci´on de datos obtenidos a respuesta de escal´on de 9 V. . . 13
1-9. Linealizaci´on de datos obtenidos a respuesta de escal´on de -10 V. . . 14
2-1. Estructura de Conexi´on y envio de Datos . . . 15
2-2. Parametros de Configuraci´on Prueba Respuesta al Escalon . . . 21
2-3. Parametros de Configuraci´on Prueba Respuesta en Frecuencia . . . 23
2-4. Par´ametros de Configuraci´on Prueba Controlador ON-OFF . . . 25
2-5. Diagrama Flujo Controlador ON-OFF planta de temperatura . . . 26
2-6. Diagrama Flujo Controlador ON-OFF planta de velocidad . . . 27
2-7. Relaci´on, Salida m´odulo DAC vs Entrada planta de velocidad. . . 30
2-8. Bloque de acondicionamiento entrada planta de velocidad. . . 31
2-9. Amplificador multientradas o Sumador-Restador [12]. . . 31
2-10.Circuito acondicionador con amplificador operacional. . . 32
2-11.Circuito de acondicionamiento de entrada planta de velocidad. . . 33
2-12.Diagrama de bloques de acondicionamiento de salida planta de velocidad. . . 33
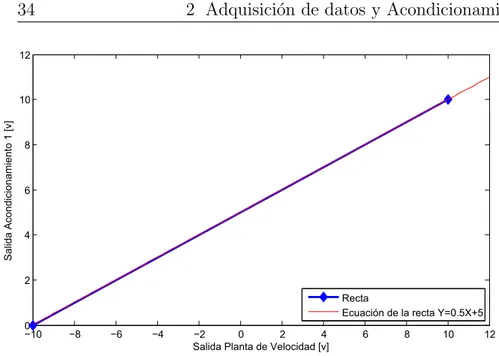
2-13.Relaci´on Voltaje de salida planta de velocidad vs voltaje de salida acondicio-namiento 1. . . 34
2-14.Circuito 1 de acondicionamiento de salida planta de velocidad. . . 35
2-15.Filtro Pasa Bajo Activo. . . 35
2-16.Divisor Resistivo. . . 36
2-17.Circuito Final de Acondicionamiento de Salida Para Planta de Velocidad. . 36
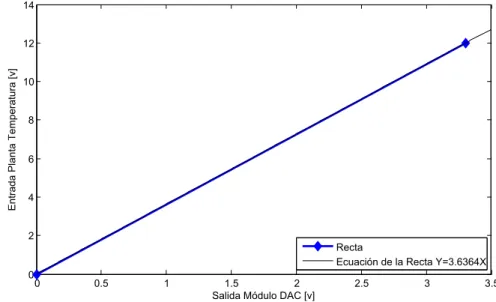
2-18.Relaci´on Salida M´odulo DAC vs Entrada Planta de Temperatura. . . 37
xiv LISTA DE FIGURAS
2-20.Circuito amplificador No Inversor, Acondicionamiento Entrada Planta
Tem-peratura. . . 38
2-21.Circuito bloque de acondicionamiento de entrada a la planta de temperatura. 39 2-22.Bloque de acondicionamiento de salida de la planta de Temperatua. . . 39
2-23.Filtro pasa bajo activo, bloque de acondicionamiento planta de Ttemperatura. 40 2-24.Circuito final de acondicionamiento de salida planta de Temperatura. . . 40
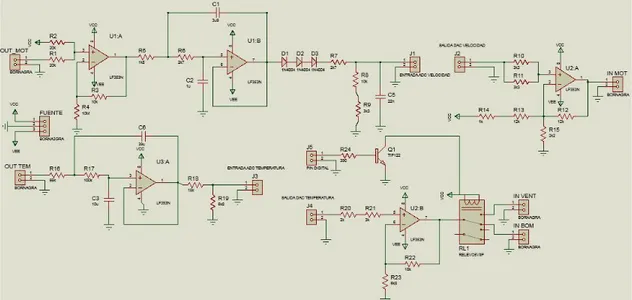
2-25.Circuito total del bloque de acondicionamiento de entrada y salida de las plantas de Velocidad Y Temperatura. . . 41
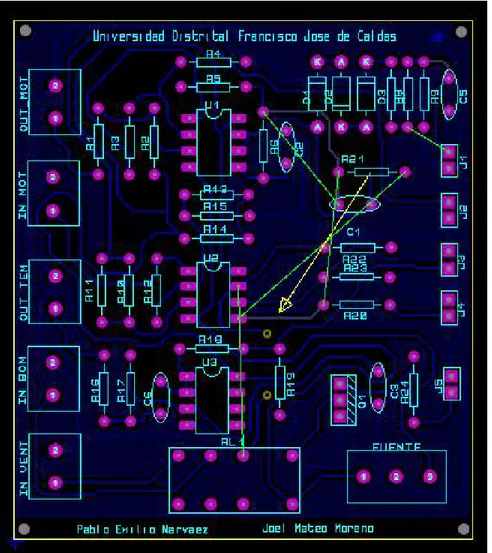
2-26.Circuito PCB del bloque de acondicionamiento de entrada y salida de las plantas de Velocidad Y Temperatura. . . 42
2-27.Circuito PCB en 3D del bloque de acondicionamiento de entrada y salida de las plantas de Velocidad Y Temperatura. . . 43
3-1. Arquitectura General de Conexi´on. . . 45
3-2. Diagrama Conexi´on entre Microcontroldor y Servidor Local. . . 46
3-3. Petici´on Polling Tradicional contra Websockets [17]. . . 48
3-4. Diagrama Publish Suscribe de PubNub [18]. . . 49
3-5. Estructura de comunicaci´on a trav´es de Internet. . . 50
3-6. Estructura de comunicaci´on a la Base de Datos. . . 51
4-1. Documento HTML5 m´ınimo, estructura. . . 55
4-2. Pagina Principal . . . 56
4-3. Recepci´on de informaci´on. Gr´afica y Tabla. . . 58
4-4. Men´us Planta de Temperatura y Velocidad . . . 59
4-5. Prueba de Respuesta al Escal´on para la Planta de Temperatura . . . 59
4-6. Prueba de Respuesta en Frecuencia para la Planta de Temperatura . . . 60
4-7. Prueba de Control ON-OFF para la Planta de Temperatura . . . 60
4-8. Prueba de Control Digital para la Planta de Temperatura . . . 61
4-9. Registro e Inicio de Sesi´on de la Pagina Web . . . 63
5-1. Linealizaci´on de datos obtenidos a respuesta de escal´on de 9 V estaci´on remota. 67 5-2. Linealizaci´on de datos obtenidos a respuesta de escal´on de -10 V estaci´on remota. . . 68
5-3. Comparaci´on respuesta al escal´on de 9 V estacion remota vs planta presencial. 69 5-4. Comparaci´on respuesta al escal´on de 10 V estacion remota vs planta presencial. 69 5-5. Comparaci´on respuesta al escal´on de -10 V estaci´on remota vs planta presencial. 69 5-6. Diagrama de Bode de magnitud para la planta de velocidad de forma presen-cial y remota. . . 70
5-7. Respuesta de la planta de velocidad a el control ON-OFF con referencia de 5 V. 72
5-8. Respuestas de planta de velocidad a escal´on de 5 V de forma remota y presencial. 73
LISTA DE FIGURAS xv
5-10.Linealizaci´on de datos obtenidos a respuesta de escal´on de 6 V estaci´on remota. 74
5-11.Linealizaci´on de datos obtenidos a respuesta de escal´on de 7 V estaci´on remota. 75
5-12.Linealizaci´on de datos obtenidos a respuesta de escal´on de 10 V estaci´on remota. 75
5-13.Comparaci´on respuesta al escal´on de 7 V estaci´on remota vs planta presencial. 76
5-14.Respuesta de la planta de temperatura presencial con controlador ON-OFF a
escal´on de 5 V y 7 V. . . 77
5-15.Respuesta de la planta de temperatura remota con controlador ON-OFF a
escal´on de 7.5 V. . . 77
5-16.Respuestas de planta de temperatura a escal´on de 6 V de forma remota y
presencial. . . 78
5-17.Respuestas de planta de temperatura a escal´on de 7 V de forma remota y
Lista de Tablas
1-1. Resultados obtenidos en laboratorio. . . 11
1-2. Resultados obtenidos en laboratorio. . . 13
2-1. Pruebas Seg´un sistema din´amico. . . 20
2-2. Rango de voltajes Configurables respuesta al escal´on seg´un Planta. . . 21
2-3. Rango de Valores Configurables para Prueba de Respuesta en frecuencia . . 23
2-4. Rango de Valores Configurables para Prueba de Controlador On-Off . . . 25
2-5. Rango de valores Configurables en el controlador Digital. . . 28
2-6. Niveles de voltaje limite en entradas y salidas de las plantas. . . 29
4-1. Lenguajes de programaci´on. . . 53
5-1. Resultados obtenidos en la Estaci´on Remota. . . 67
5-2. Resultados obtenidos en la Estaci´on Remota VS Resultados obtenidos planta presencial. . . 68
5-3. Resultados planta de velocidad en respuesta en frecuencia obtenidos de forma presencial. . . 70
5-4. Resultados planta de velocidad en respuesta en frecuencia obtenidos de forma remota. . . 71
5-5. Resultados de hist´erisis control ON-OFF planta de velocidad. . . 71
5-6. Resultados de tiempo de levantamiento control ON-OFF planta de velocidad. 72 5-7. Resultados obtenidos en la Estaci´on Remota VS Resultados obtenidos planta presencial controlador digital. . . 73
5-8. Resultados obtenidos en la Estaci´on Remota. . . 74
5-9. Resultados obtenidos en la Estaci´on Remota VS Resultados obtenidos planta presencial. . . 75
5-10.Resultados de hist´erisis control ON-OFF planta de temperatura. . . 76
Introducci´
on
El motivo por el cual se emprendi´o ´este proyecto de investigaci´on surge de la necesidad de
aportar una soluci´on frente a la problem´atica que enfrentan muchos estudiantes durante el
transcurso de su carrera de ingenier´ıa electr´onica, donde afrontaron en repetidas ocasiones
inconvenientes en sus pr´acticas de laboratorio, un claro ejemplo de esta problem´atica se
en-cuentra en la realizaci´on de las practicas de laboratorio en el ´area de control, en donde los
estudiantes invierten gran cantidad de tiempo en la preparaci´on y ejecuci´on de la practica,
y tambi´en en la b´usqueda del espacio f´ısico para realizar sus experimentos, incluso llegando
a recurrir a espacios adicionales nocturnos en laboratorios; en donde la mayor´ıa del tiempo invertido no era utilizado precisamente en el desarrollo propio de la practica de control, si
no, en la construcci´on y prueba de funcionamiento de los sistemas din´amicos a utilizar. En
consecuencia lo anteriormente dicho, se presenta la interrogante del por qu´e actualmente no
son aprovechadas las ventajas ofrecidas en el mundo en cuanto a tecnolog´ıa, espec´ıficamente
en el ´area de las comunicaciones y a la iniciativa llamada IoT (internet of things), en donde
se propone la conexi´on de objetos cotidianos a la red de internet [2] [3].
Otra de las causas que motivaron a realizar ´este trabajo, fue darle continuidad al proyecto [1],
en donde se desarrollaron y se implementaron los prototipos de plantas b´asicas de control, las
cuales fueron: la planta de temperatura, y la planta de velocidad. ya que con la culminaci´on
de ese proyecto, se present´o una gran oportunidad para convertir estos prototipos en parte
fundamental de la implementaci´on de la estaci´on remota propuesta en ´este trabajo.
La metodolog´ıa que se propone para dar soluci´on al problema, se basa en dar cumplir con
cada uno de los objetivos espec´ıficos, los cuales se efect´uan en cada una de las partes que
conforman el desarrollo del proyecto, que se encuentran a continuaci´on:
Este proyecto esta dividido en cinco grandes partes, las cuales son la identificaci´on de los
sis-temas, la etapa de adquisici´on y procesamiento de datos con su respectivo acondicionamiento
de se˜nal, la arquitectura general de conexi´on de las etapas para su integraci´on con internet,
el desarrollo de la interface gr´afica para la manipulaci´on de la planta de forma remota, y por
ultimo la obtenci´on y muestra de resultados hechos en la estaci´on remota para su posterior
2 INTRODUCCI ´ON
En la primera parte del proyecto, la cual corresponde a la Identificaci´on de los sistemas,
donde se conocen los elementos que constituyen la parte mas importante del proyecto
co-mo lo son los sistemas din´amicos de velocidad y temperatura. En esta secci´on de explora
brevemente como es su funcionamiento y como fueron construidas para posteriormente ser
identificadas, modeladas y caracterizadas matem´aticamente.
En la siguiente parte del proyecto se tiene como elemento principal el microcontrolador el
cual esta encargado de la l´ogica de las pruebas y de la comunicaci´on de las plantas con el
exterior. En esta secci´on se muestran detalladamente los flujos de los algoritmos que
consti-tuyen la l´ogica de cada una de las pruebas como respuesta al escal´on, respuesta en frecuencia,
controlador on-off y controlador digital; y el tratamiento de las se˜nales provenientes de las
plantas y enviadas hacia ellas. A esta secci´on tambi´en la compone el la descripci´on detallada
de la construcci´on del bloque de acondicionamiento de se˜nales anal´ogicas, necesario para la
integraci´on y comunicaci´on bidireccional entre cualquiera de las plantas y el
microcontrola-dor.
Posteriormente se encuentra la secci´on en donde se muestra la arquitectura o estructura de
comunicaci´on entre las distintas etapas f´ısicas del proyecto. En esta secci´on se muestra como
es el flujo de la informaci´on comenzando desde las plantas, pasando por el microcontrolador
y servidor local, para su posterior integraci´on con la Internet y los recursos disponibles en ella
como bases de datos y servidores web. Se muestran tambi´en, los protocolos de comunicaci´on
y los elementos que fueron utilizados para lograr una integraci´on exitosa entre la planta y el
usuario final.
Seguidamente se muestra la construcci´on de la pagina web usada como interface gr´afica de
usuario, la estructura visual del laboratorio remoto, para la interacci´on y configuraci´on de
pruebas por parte de el usuario, as´ı como la visualizaci´on de los datos obtenidos en cada una
de las pruebas. Tambi´en se muestran los distintos elementos requeridos para la construcci´on
de la pagina, como lenguajes de programaci´on web tales como html5, php, java script etc, y
bases de datos para el alojamiento de la informaci´on de autenticaci´on y registro de usuarios
de la estaci´on remota. Por otro lado se indica en esta secci´on el dominio o nombre con la
cual se aloja la pagina en un host de Internet.
Por ultimo se presentan los resultados obtenidos para las pruebas realizadas con las plantas
de forma presencial y con la estaci´on remota. Estos resultados se analizan y se comparan
entre si, para ambas plantas y para cada una de las pruebas que puedan realizarse en la
Objetivos
Objetivo General
Dise˜nar e implementar una estaci´on de accesibilidad remota, para la ense˜nanza de conceptos
de control, con el fin de reducir los tiempos empleados en la experimentaci´on, facilitar el
acceso y disposici´on de estas plantas a la comunidad acad´emica.
Objetivos Espec´ıficos
Verificar y garantizar el funcionamiento de las plantas a utilizar, para realizar la
iden-tificaci´on de los sistemas din´amicos con los cuales se va a trabajar.
Dise˜nar e implementar un m´odulo de adquisici´on de datos para el tratamiento de las
se˜nales de entrada y salidas de las plantas con su respectivo bloque de
acondiciona-miento.
Adoptar e implementar una estructura de comunicaci´on que permita la interacci´on
entre usuario (estudiante-profesor) y la estaci´on remota, a trav´es de internet.
Dise˜nar y desarrollar la interfaz gr´afica usuario que le permita interactuar con la
es-taci´on remota de manera que se pueda recibir y enviar datos, y tambi´en gestionar el
acceso a las plantas.
Garantizar el correcto funcionamiento de la estaci´on remota.
Obtener, comparar y analizar los resultados adquiridos de las diferentes pruebas que
se puedan realizar en la estaci´on remota y en las plantas de manera presencial.
Aportar conocimiento cient´ıfico derivado de este proyecto, a trav´es de un informe final
Planteamiento del Problema y Justificaci´
on
En la actualidad el enfoque de la educaci´on est´a convergiendo a nuevas tendencias para la
ense˜nanza a distancia, esta tendencia crece de la mano con el constante avance tecnol´ogico
en sistemas de comunicaci´on cada vez m´as avanzados, que permiten recortar distancias ya
sea entre personas o sistemas, estas ventajas ofrecidas no est´an siendo totalmente
explota-das, desperdiciando as´ı las grandes mejor´ıas que se ofrecen en las ´areas de la educaci´on y la
experimentaci´on a distancia.
Por otro lado, la comunidad acad´emica relacionada con el ´area de control, tienen que realizar
grandes esfuerzos para la construcci´on de prototipos que les permitan realizar experimentos
en esta ´area, desperdiciando gran parte de su tiempo en la implementaci´on y no en la
obser-vaci´on de comportamientos propios del sistema. A estos problemas mostrados anteriormente
se suma el hecho de que al realizar este tipo de pr´acticas de manera tradicional, es necesario
apartar un lugar de laboratorio, trasladarse a ese lugar, preparar el equipo para realizar las pruebas, conectar el prototipo de forma correcta, extraer los datos y analizarlos
posterior-mente. Parte de este tiempo podr´ıa ser utilizado en labores acad´emicas y no en transportes
o montajes de circuitos.
Es por estas razones presentadas anteriormente que surge la necesidad de preguntarse:
¿exis-te actualmen¿exis-te un sis¿exis-tema de acceso remoto para plantas b´asicas utilizadas en la ense˜nanza
de conceptos de control en ingenier´ıa para realizar experimentos? Si Existe ¿es de f´acil acceso
para la comunidad acad´emica o personas afines al ´area?, ¿reducir´ıa el tiempo empleado en
la realizaci´on de pr´acticas de control utilizando este tipo de sistema remoto?, ¿tendr´ıa este
sistema, un impacto positivo en la metodolog´ıa de la ense˜nanza?.
Dadas estas condiciones, se hace imperativo dise˜nar e implementar un sistema de acceso
remoto para plantas b´asicas utilizadas en la ense˜nanza de conceptos de control en ingenier´ıa
que permita a los estudiantes y docentes realizar experimentos en tiempo real a estas
plan-tas, solo con el requisito de tener una conexi´on de internet lo suficientemente r´apida y un
Cap´ıtulo 1
Funcionamiento de los sistemas din´
amicos,
identificaci´
on y caracterizaci´
on de las Plantas
Las plantas utilizadas para el desarrollo de este trabajo fueron desarrolladas anteriormente
en el proyecto de investigaci´on DISE ˜NO E IMPLEMENTACION DE PLANTAS BASICAS
PARA LA ENSE ˜NANZA DE CONCEPTOS DE CONTROL EN INGENIERIA [1] el cual
fue financiado por el Centro de Investigaciones de la Universidad Distrital (CIDC), en el
mismo grupo de investigaci´on de este proyecto: Investigaci´on, Desarrollo y Aplicaciones en
Se˜nales (IDEAS), e implementado por las mismas personas que desarrollan este trabajo. En
total se construyeron dos sistemas t´ermicos y dos sistemas de velocidad, de los cuales solo
se utiliz´o un prototipo de cada uno de los sistemas. Para la realizaci´on del presente proyecto
se seleccion´o un prototipo de cada una de las plantas, para la planta de temperatura se
seleccion´o el prototipo N◦2 y para la planta de velocidad el prototipo N◦1.
Las plantas cuentan con sus respectivas estructuras f´ısicas, circuitos impresos, fuentes de
alimentaci´on, conexiones exteriores, y elementos de visualizaci´on e interacci´on para su uso
pr´actico, las plantas a utilizar se muestran en la Figura 1-1.
1.1.
Descripci´
on T´
ecnica de la Planta T´
ermica
La planta t´ermica es un sistema din´amico que se modela como un sitema aproximado de
pri-mer orden que est´a constituido por una capacitancia t´ermica, una resistencia t´ermica y una
fuente de calor. La planta t´ermica consiste en un horno que se calienta o enfr´ıa en funci´on
de un voltaje que se encuentra en un rango de 0 V a 12 V en las dos entradas. La primera
entrada permite calentar el sistema por medio de un bombillo hal´ogeno de 35 W, La segunda
entrada permite enfriar el sistema con un ventilador, la variable de salida del sistema es la
temperatura al interior del horno con una sensibilidad de 0.1 V/◦C.
La planta tiene una fuente de alimentaci´on sencilla de 12 V a 4,2 amperios que suministra
6
1 Funcionamiento de los sistemas din´amicos, identificaci´on y
caracterizaci´on de las Plantas
(a) Planta de Velocidad. (b) Planta de Temperatura.
Figura 1-1: Plantas de Velocidad y Temperatura.
Como la potencia suministrada al bombillo debe ser lineal con respecto a la entrada, se
emple´o un circuito seguidor de potencia como se muestra en la Figura 1-2, el cual utiliza
un amplificador operacional y un transistor de potencia junto con un transistor com´un que
cumplieran la funci´on de driver de corriente en configuraci´on Darlington.
Para la entrada del ventilador se utiliza un arreglo de resistencias que aten´ua la se˜nal de
voltaje de entrada, este voltaje debe estar en el rango admitido por el ADC del
microcontro-lador de la planta, el cual es un MSP430G2553 [4], este voltaje es transformado en una se˜nal
pwm proporcional a la se˜nal de entrada, con el cual se controla la velocidad del ventilador.
1.1 Descripci´on T´ecnica de la Planta T´ermica 7
Para la se˜nal de salida de la planta de temperatura, se utiliza un sensor de temperatura de
referencia LM35 [5], este sensor tiene una sensibilidad de 10 mV/◦C. Ya que se desea tener
una se˜nal con una sensibilidad de 100 mV/◦C, se utiliza un amplificador no inversor de una
ganancia de 10 V/V, despu´es a un filtrado de la se˜nal proveniente sensor de temperatura
como se muestra en la Figura 1-3.
Figura 1-3: Etapa de acondicionamiento.
Luego se encuentra un circuito de protecci´on para la se˜nal de salida el cual consiste en un
seguidor de potencia en configuraci´on push pull que entrega el voltaje de salida a trav´es de
un relevo que protege el circuito en caso de un corto en la salida, incrementando la corriente
y activando el relevo, y de esta manera aislando la se˜nal de salida del exterior, ´este circuito
se muestra en la Figura 1-4. Para retornar el sistema a su estado inicial se debe desenclavar
el relevo.
8
1 Funcionamiento de los sistemas din´amicos, identificaci´on y
caracterizaci´on de las Plantas
1.2.
Descripci´
on Planta de Velocidad
La planta de velocidad es un sistema din´amico electromec´anico que est´a constituido por un
motor [6] del cual se pueden extraer dos variables de salida: la velocidad o la posici´on. La
planta de velocidad cuenta con una entrada ´unica, la cual recibe una se˜nal de voltaje como
referencia para el motor.
Este motor funciona en un rango entre -10 V a 10 V con cambio en sentido de giro
dependien-do de la polaridad de la se˜nal de entrada, con la posibilidad de cambio de variable de salida
ya sea posici´on o velocidad. La salida se encuentra en un rango de voltajes entre -10 V a 10 V.
La planta cuenta con dos fuentes que permiten una polarizaci´on dual del circuito interno,
estas son necesarias para permitir voltajes de entrada y salida tanto positivos como
negati-vos, las dos fuentes son de 12 V a 3 A y se conectan en serie para la polarizaci´on del circuito.
Adem´as, el circuito cuenta con reguladores de 5 V y 3 V para la polarizaci´on del encoder
del motor y de los microcontroladores.
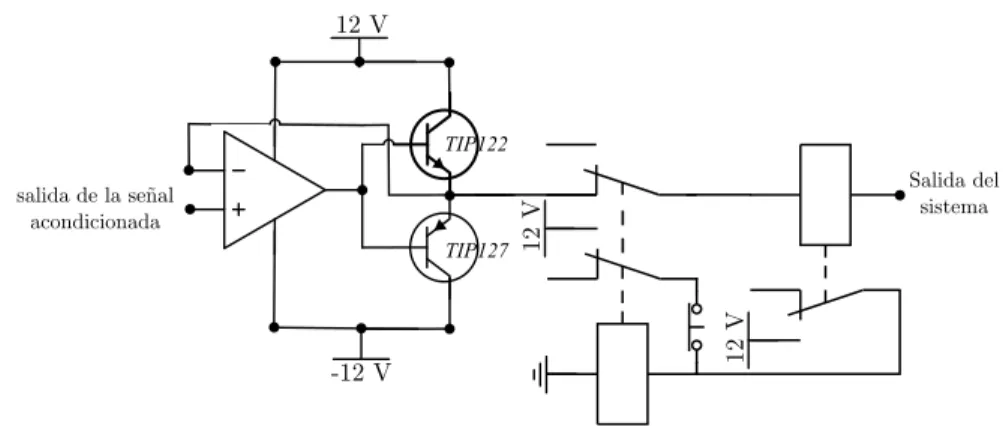
El circuito de la Figura1-5 alimenta el motor utilizando un seguidor de potencia basado en
un amplificador operacional que se conecta a un arreglo de transistores configurados en push
pull con polarizaci´on dual, que le permite a la entrada recibir voltajes positivos y negativos.
Figura 1-5: Circuito de potencia para motor.
En la etapa de salida se pueden tener 2 se˜nales distintas, ya sea velocidad o posici´on. Para
la lectura de la posici´on o velocidad del motor se utiliza un encoder, la se˜nal enviada por el
encoder tiene una resoluci´on de 1024 datos en un giro, si se toman ambos canales y flancos
de subida y bajada de dicha se˜nal. Posteriormente La se˜nal del encoder es procesada l´
1.3 Identificaci´on y caracterizaci´on de las Plantas 9
conversor DAC serial de resoluci´on de 10 bits.
Si la salida es la velocidad, el microcontrolador determina el ancho del pulso proporcionado
por el encoder, esta velocidad ser´a inversamente proporcional al ancho del pulso.
Si la salida del sistema es posici´on, el microcontrolador contara cada uno de los pasos del
encoder para definir la posici´on del motor, debido a que el encoder no tiene un punto de
referencia para definir la posici´on inicial, el sistema cuenta con un sensor, el cual cada vez
que pasa por un punto determinado (0 grados) reinicia la posici´on y obtiene un punto de
referencia para su medici´on.
Debido a que el DAC entrega valores de voltaje entre 0 v y 5 v, se utiliza una etapa de
acondicionamiento de se˜nal que transforma dicho rango de voltajes a uno entre -10 v y 10
v. Posterior al acondicionamiento mencionado anteriormente, se encuentra un circuito de
protecci´on el cual esta conformado por un seguidor de potencia en configuraci´on push pull
que entrega el voltaje de salida a trav´es de un circuito serie conformado por un contacto
normalmente cerrado de un relevo y la bobina de baja impedancia del mismo relevo. En caso de un corto circuito en la salida, la corriente se incrementa y el relevo se activa, aislando la
se˜nal de salida del exterior. Para retornar el sistema a su estado inicial se debe desenclavar
el relevo.
1.3.
Identificaci´
on y caracterizaci´
on de las Plantas
Para la caracterizaci´on de estas plantas, se deben tene en claro los conceptos descritos en [7],
sobre la definici´on, modelamiento y an´alisis de un sistema din´amico, las ecuaciones matem´
ati-cas implicadas para cada sistema (Temperatura y Velocidad o motor DC), la transformada
de Laplace, an´alisis de sistemas lineales y funciones de transferencia.
Con los conceptos anteriores claros y definidos podemos proceder a realizar la caracterizaci´on
para hallar un modelo matem´atico que represente a estos sistemas din´amicos.
Algunos de los requerimientos en cuanto a infraestructura y equipos para realizar la
carac-terizaci´on se listan de la siguiente forma:
Disponibilidad de un laboratorio dotado con los equipos necesarios para realizar las pruebas correspondientes.
Equipos de laboratorio en buen estado, dado que esto ayuda a la reducir el margen de
error en los resultados y de esta manera lograr un modelo mucho m´as aproximado a lo
10
1 Funcionamiento de los sistemas din´amicos, identificaci´on y
caracterizaci´on de las Plantas
Realizar el n´umero necesario de pruebas que sean pertinentes para lograr as´ı conseguir
un mejor modelo.
1.3.1.
Caracterizaci´
on e identificaci´
on de la planta de temperatura
Dado que la caracterizaci´on de la planta de temperatura, busca modelar matem´aticamente
el sistema din´amico, se procede entonces a construir la funci´on matem´atica que modele el
comportamiento de dicho sistema. Para hallar la funci´on de transferencia que describe el
comportamiento de la planta de temperatura se plante´o el siguiente procedimiento:
Debido a que la planta de temperatura tiene una respuesta o comportamiento equivalente a
un sistema de primer orden, su funci´on de salida en el tiempo a una entrada escal´on es
y(t) =a·k(1−e−τt) +T A. (1-1)
Donde a es la amplitud del escal´on de entrada, k es la ganancia de la planta de
tempera-tura, τ es la constante de tiempo de la planta de temperatura y T A es el equivalente a la
temperatura ambiente.
Luego de obtener la funci´on en el tiempo de la planta de temperatura, se construye la funci´on
de transferencia, la cual es la transformada de Laplace de la funci´on en el tiempo y es:
G(s) = k
τ ·s+ 1. (1-2)
Para hallar los par´ametros que conforman la funci´on de transferencia, los cuales son, τ
constante de tiempo de la planta y k la ganancia de planta; se deben realizar las pruebas
correspondientes en el laboratorio a la planta de temperatura. Estas pruebas constan de
aplicar una se˜nal de tipo escal´on en la entrada de la planta, para luego observar y analizar
la respuesta generada en el tiempo en la salida de la planta. A los datos obtenidos en
dichas pruebas se les realiza posteriormente una linealizaci´on logar´ıtmica, con el prop´osito
de encontrar los valores de k y τ. Para ´este proceso se realizan lo siguientes pasos:
Para hallark se utiliza:
k = y(∞)−T A
a . (1-3)
Dondey(∞) es el valor que proporciona el sistema cuando ya se encuentra estable.
Se despeja −t
τ de (1-2) y se obtiene la siguiente expresi´on:
−t
τ =LN
1− y(t)−T A
a·k
. (1-4)
De esta manera con los datos obtenidos en laboratorio comoT A,y(t) ykse transforma
las respuesta en el tiempo en un recta con pendiente −1
τ, que corresponde al polo del
1.3 Identificaci´on y caracterizaci´on de las Plantas 11
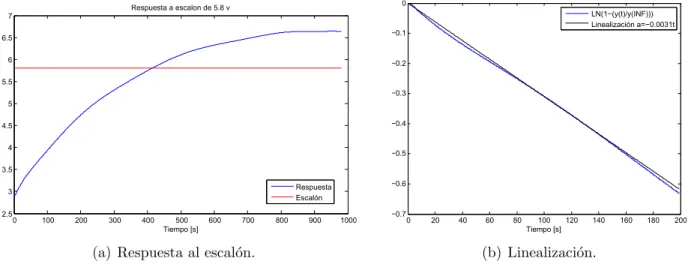
Los resultados finales de las pruebas son los mostrados en la Tabla 1-1. La Figura 1-6 y
Figura1-7muestran los datos linealizados para la caracterizaci´on de una se˜nal con respuesta
al escal´on de 5.8 V y 7 V respectivamente.
(a) Respuesta al escal´on. (b) Linealizaci´on.
Figura 1-6: Linealizaci´on de datos obtenidos a respuesta de escal´on de 5.8 V.
(a) Respuesta al escal´on. (b) Linealizaci´on.
Figura 1-7: Linealizaci´on de datos obtenidos a respuesta de escal´on de 7 V.
Tabla 1-1: Resultados obtenidos en laboratorio.
Nivel de la se˜nal escal´on [V] 1τ k 5.8 0.0031 0.68103448
7 0.0041 0.68181818 Promedio 0.0036 0.68142633
Al promediar los resultados finales, se tiene que la funci´on de transferencia de la planta de
temperatura es:
12
1 Funcionamiento de los sistemas din´amicos, identificaci´on y
caracterizaci´on de las Plantas
1.3.2.
Caracterizaci´
on de la planta de velocidad
Para hallar la funci´on de transferencia del sistema din´amico que describe la planta de
velo-cidad se plantea el mismo procedimiento hecho en la caracterizaci´on de la planta de
tempe-ratura, solo con algunas variaciones en las ecuaciones.
Debido a que la planta de velocidad tiene una respuesta o comportamiento aproximado a un
sistema de primer orden, su funci´on de salida en el tiempo a una entrada escal´on es como la
descrita en:
y(t) =a·k(1−e−τt), (1-5)
En donde a es la amplitud del escal´on de entrada, k es la ganancia de la planta de
tempe-ratura y τ es la constante de tiempo de la planta de temperatura.
Luego de obtener la funci´on en el tiempo de la planta de velocidad, se construye la funci´on
de transferencia, la cual es la transformada de Laplace de la funci´on en el tiempo, dicha
funci´on se muestra en:
G(s) = k
τ ·s+ 1, (1-6)
Teniendo en claro que es la funci´on de transferencia de un sistema de primer orden. Esta
aproximaci´on se hace debido a que el segundo polo del sistema de velocidad (lo que indica
que el sistema de velocidad es de segundo orden) no afecta considerablemente en la respues-ta, por consiguiente se omite y se aproxima a un sistema de primer orden.
Para hallar los par´ametros que conforman la funci´on de transferencia, los cuales son, τ
constante de tiempo de la planta y k la ganancia de planta; se deben realizar las pruebas
correspondientes en el laboratorio a la planta de velocidad. Estas pruebas constan de
apli-car una se˜nal de tipo escal´on en la entrada de la planta, para luego observar y analizar la
respuesta en el tiempo generada en la salida de la planta.
A los datos obtenidos en dichas pruebas se les realiza una linealizaci´on logar´ıtmica, con
el prop´osito de encontrar los valores de k y τ. Para ´este prop´osito se realiza el siguiente
procedimiento:
Para hallark se utiliza:
k = y(∞)
a . (1-7)
1.3 Identificaci´on y caracterizaci´on de las Plantas 13
Se despeja −t
τ de (1-5) y se obtiene:
−t
τ =LN
1− y(t)
a·k
. (1-8)
De esta manera con los datos obtenidos en laboratorio como y(t) y k se transforma
las respuesta en el tiempo en un recta con pendiente −1
τ, que corresponde al polo del
sistema de primer orden.
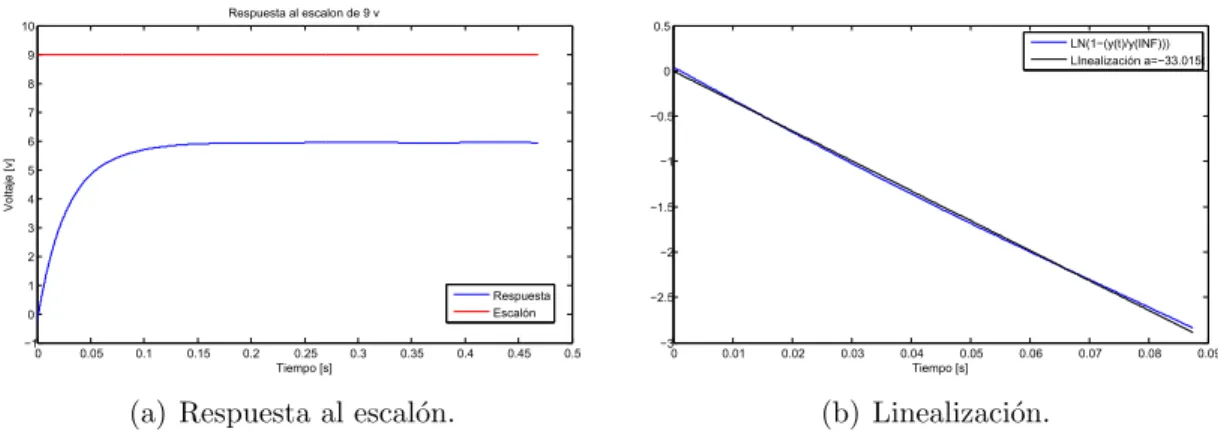
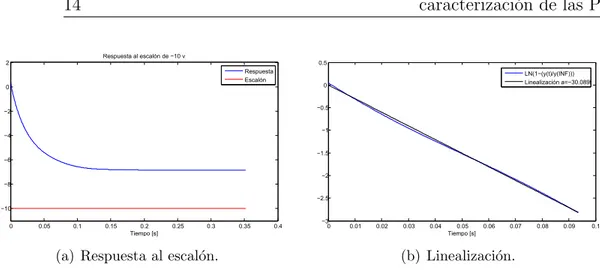
Los resultados finales de las pruebas son los mostrados en la Tabla 1-2. La Figura 1-8 y
Figura1-9muestran los datos linealizados para la caracterizaci´on de una se˜nal con respuesta
al escal´on de 9 V y -10 V respectivamente.
Tabla 1-2: Resultados obtenidos en laboratorio.
Nivel de la se˜nal escal´on [V] τt t τ
k -5 25.028 0.532 -7 28.64 0.6185 -8 30.34 0.658 -9 30.253 0.655 -10 30.089 0.667 5 23.965 0.517 7 24.984 0.5885 8 32.677 0.6368 9 33.016 0.6506 10 33.071 0.6715 PROMEDIO 29.2249 0.61949
Al promediar los resultados finales, se tiene que la funci´on de transferencia de la planta de
velocidad es:
G(s) = 0,034217s+10,61949 , y su equivalente es G(s) = s+29,224918,1047 .
(a) Respuesta al escal´on. (b) Linealizaci´on.
14
1 Funcionamiento de los sistemas din´amicos, identificaci´on y
caracterizaci´on de las Plantas
(a) Respuesta al escal´on. (b) Linealizaci´on.
Cap´ıtulo 2
Adquisici´
on de datos y Acondicionamiento de
se˜
nal
2.1.
Adquisici´
on y Envi´
o de datos
Luego de realizar la identificaci´on de los sistemas de velocidad y posici´on, conocer sus
ran-gos de funcionamiento. Se requiere que un sistema embebido o microcontrolador reciba las
se˜nales provenientes de las plantas y envi´e se˜nales de vuelta para su control, a continuaci´on
se muestra la estructura propuesta y desarrollada.
Como se observa en la Figura2-1la estructura de adquisici´on y envi´o de datos esta dividida
en 3 partes, el acondicionamiento de la se˜nal de entrada, el acondicionamiento de la se˜nal
de salida, y el sistema embebido.
16 2 Adquisici´on de datos y Acondicionamiento de se˜nal
2.1.1.
Selecci´
on del sistema embebido
Para el proceso de selecci´on del sistema embebido fue necesario tener en cuenta m´ultiples
factores como rendimiento costo, prestaciones del sistema y versatilidad para programar.
Desde el principio se requiri´o utilizar un sistema econ´omico, con la posibilidad de conectarlo
a internet a trav´es de un protocolo Ethernet y que tuviera la posibilidad de manejar se˜nales
anal´ogicas con m´odulos de conversi´on digital anal´ogica y anal´ogica digital. A continuaci´on se
muestran dos sistemas embebidos que fueron evaluados y probados en el proceso de selecci´on.
Intel Galileo Gen 1
Inicialmente se pens´o en utilizar plataformas con facilidad de pr´estamo en la universidad,
las primeras pruebas se realizaron con la placa Intel Galileo Gen 1 [8]. La placa cuenta con las siguientes caracter´ısticas:
Es un Microcontrolador basado en un procesador Intel Quark SoC X1000 32 bits
16 KB L1 cache
512 KB de SRAM
256 MB DRAM
11 KB de memoria que pueden ser programado por medio de una librer´ıa.
Conector 10/100 Ethernet.
Software y hardware pin compatible con arduino (14 pines digitales y 5 pines de entrada
anal´ogica)
Voltaje de alimentaci´on puede ser de 5 V o 3.3V
Comunicaci´on Serial As´ıncrona UART
Bus I2C con pines SDA, SDL, y su respectivo pin de referencia.
Comunicaci´on SPI configurada con 4 Mhz por defecto, programable hasta 25 Mhz
Conexi´on con tarjeta miniSD incorporada
Conector miniPCIe que puede ser utilizado para agregar una extensi´on wifi o USB.
Limitaciones:
La placa Intel galileo no se utiliz´o para la implementaci´on debido a las razones que
presen-taremos a continuaci´on:
La tarjeta de desarrollo no tiene un pin de conexi´on digital anal´ogico que permita
enviar se˜nales del microcontrolador a la planta, para implementar esta funcionalidad
2.1 Adquisici´on y Envi´o de datos 17
La tarjeta de desarrollo est´a m´as orientada a ser un peque˜no computador con manejo
de sistema operativo Linux, que un microcontrolador para su implementaci´on en m´as
bajo nivel. La simulaci´on de un entorno de desarrollo arduino no ofrece las mismas
prestaciones reales de un arduino, ya que no permite utilizar algunas de sus librer´ıas,
y no es posible su programaci´on a m´as bajo nivel con registros que controlen los
perif´ericos. Para ello es necesario utilizar comandos en consola como los utilizados en
sistemas operativos Linux.
Al realizar la programaci´on del dispositivo, el programa compilado se almacenaba en la
memoria RAM del sistema embebido, lo cual impide que el programa quede guardado
para ser ejecutado despu´es de un reinicio, para guardar el programa era necesario
insertar una tarjeta microSD en el slot de la Intel galileo y realizar un proceso extenso para programarlo.
Como el programa que se quer´ıa ejecutar en la Intel galileo se corre bajo un sistema
operativo Linux liviano, el tiempo de espera para que el programa se ejecutar´a
de-moraba aproximadamente 40 segundos, mientras el sistema operativo se iniciaba, esto
causaba un impacto negativo en la ejecuci´on del programa.
La principal causa para no utilizar esta tarjeta de desarrollo, mostrada en [9], es su
velocidad de muestreo en se˜nales anal´ogicas y su velocidad de respuesta en puertos
digitales, ya que el procesador principal de la Intel galileo utiliza un dispositivo I2C
Cypress CY8C9540A para actualizar o recibir las se˜nales del exterior, debido a que
es un dispositivo serial que administra se˜nales paralelas, tiene un tiempo de mayor
respuesta. La frecuencia por defecto configurada para este dispositivo es de 100Khz.
Pero cada requerimiento de actualizaci´on de los GIPO tarda aproximadamente 2ms,
esto en el caso de una se˜nal digital, para una se˜nal anal´ogica el tiempo de muestreo es
aun mayor. Para el proyecto esto resulta ser una limitaci´on importante, ya que para
la planta de velocidad, la tasa de muestreo tiene valores muy cercanos o justos a los especificados anteriormente, lo cual no permite muestrear eficientemente los valores
de dicha planta, debido a los tiempos m´aximos de muestreo, aun sin contar con los
tiempos de ejecuci´on del programa principal.
Freescale FDRMK64F
Posteriormente se utiliz´o en el microcontrolador de Freescale el FDRMK64F [10],
microcon-trolador con el cual se realiz´o la implementaci´on definitiva, uno de las principales razones
por las cuales se utilizo es por su integraci´on con se˜nales anal´ogicas, ya que cuenta con un
pin DAC y un puerto con pines que pueden configurarse como conversores ADC.
18 2 Adquisici´on de datos y Acondicionamiento de se˜nal
internet. ´Este finalmente no se utiliz´o por razones que se explican en el Capitulo 3.
En comparaci´on con la Intel galileo implementada inicialmente, el microcontrolador FDRMK64F
ofrece mejores prestaciones en cuanto a velocidad de muestreo de se˜nales anal´ogicas ya que
no necesita de un dispositivo serial para actualizar sus puertos y la velocidad de su reloj
interno es de 120 MHz. El microcontrolador freescale tambi´en ofrece mayores ventajas en la
posibilidad de programar a un nivel m´as bajo, y por ende tener mayor control sobre el flujo
de programa que se desea implementar.
Las principales caracter´ısticas de la placa FDRM-K64-F se muestran a continuaci´on:
Microcontrolador MK64F 120 Mhz , 1 MB de memoria flash, 256 KB de memoria RAM
Interfaz USB con Doble funcionalidad y conector micro-B USB.
Modulo Ethernet
Slot para tarjeta SDHC
Magnet´ometro y Aceler´ometro embebidos
M´odulo ADC resoluci´on de 16 bits configurables de alta velocidad (500ns)
Una salida DAC de 12 bits
4 Timers
5 m´odulos UART: Un m´odulo UART que soporta el protocolo RS232 con control de
flujo RS485, y ISO7816, y cuatro m´odulos UART que soportan RS232 con control de
flujo y RS485.
Un M´odulo I2C
Un M´odulo I2S
2.1.2.
Entorno de Desarrollo y Consideraciones de
Implementa-ci´
on
Entorno de Desarrollo
El IDE (integrated development environment) utilizado para el desarrollo del programa del microcontrolador FDRMK64F fue la plataforma mbed, esta plataforma permite el desarrollo en l´ınea y de manera compartida con otros usuarios. mbed es una plataforma desarrollada
por ARM para soportar compatibilidad de m´ultiples microcontroladores con procesadores
desarrollados por la misma empresa. El lenguaje de programaci´on utilizado en esta
2.1 Adquisici´on y Envi´o de datos 19
La ventaja del IDE es su facilidad para programar pines, m´odulos de interrupciones o
subru-tinas de tiempo espec´ıficas, de manera que no existe la necesidad de acceder directamente
a los registros de configuraci´on del microcontrolador, Al igual que los comandos utilizados
por un ARDUINO. Otra de las ventajas de este IDE es el soporte que ofrece en l´ınea, y la gran cantidad librer´ıas y foros de ayuda dentro de una comunidad soportada por ARM.
mbed hace un especial ´enfasis en integraciones a trav´es de internet o com´unmente llamado
IoT (Internet of things).
Consideraciones de implementaci´on
En relaci´on a la planta de velocidad, el tiempo de respuesta es significativamente m´as r´apido
que el la planta de temperatura (casi una muestra por milisegundo), por lo cual no es posible
enviar datos de esta planta a trav´es de internet en tiempo real sin que ocurra una retardo
significativo, ya que el tiempo que tarda el envi´o de un solo dato a trav´es de internet est´a
aproximadamente en cientos de milisegundos, el microcontrolador o sistema embebido debe tomar y agrupar todos los datos de una prueba y posteriormente enviarlos ya sea de forma
serial con el m´odulo UART o envi´andolos por el modulo Ethernet.
En relaci´on a la planta de temperatura debido a la lentitud en su respuesta temporal la
estructura en la forma de envi´o de datos es distinta ya que para esta planta el tiempo de
muestreo es en segundos, lo que permite que se puedan muestrear y enviar datos, sin nece-sidad de agruparlos y enviarlos posteriormente como en el caso de la planta de velocidad.
La comunicaci´on del microcontrolador para su conexi´on con internet finalmente no se realiz´o
con el modulo Ethernet por razones que se explicaran en el siguiente cap´ıtulo, en lugar de
ello se utiliz´o la comunicaci´on serial con el m´odulo UART y un computador como puente
para la comunicaci´on con Internet.
2.1.3.
Desarrollo de los Programas para Sistema T´
ermico y de
Velocidad
El programa desarrollado para cualquiera de las dos plantas tiene como foco principal
ad-quirir y enviar datos desde y hacia la propia planta con un punto intermedio de conexi´on,
el cual es un computador que recibir´a y enviara se˜nales al microcontrolador por medio del
protocolo serial UART, el computador es el puente para la posterior conexi´on a internet.
En la Tabla: 2-1 se muestra las posibles pruebas a las cuales puede acceder el usuario
dependiendo de la planta. Los c´odigos de todos los programas implementados en el
20 2 Adquisici´on de datos y Acondicionamiento de se˜nal
Tabla 2-1: Pruebas Seg´un sistema din´amico.
Planta T´ermica Planta de Velocidad Respuesta al escal´on Aplica Aplica Respuesta en Frecuencia Aplica Aplica Controlador ON OFF Aplica Aplica Controlador Digital Aplica Aplica Enfriamiento de la planta Aplica No Aplica
Inicializaci´on del programa principal
Independientemente de la planta, en el programa principal se establecen los par´ametros de
inicializaci´on como configuraci´on de puertos de salida y perif´ericos utilizados, las principales
configuraciones iniciales se muestran a continuaci´on.
Configuraci´on de Modulo UART para comunicaci´on a trav´es de un computador con
velocidad est´andar de 9600 Baudios.
Configuraci´on de Salida DAC para enviar se˜nales a la planta a trav´es del
acondiciona-miento de se˜nal por medio de la salida DAC0 OUT.
Configuraci´on de Entrada de se˜nales anal´ogicas enviadas desde la planta en la entrada
A0.
Configuraci´on de Interrupciones seg´un tiempo de muestreo de la se˜nal para cada una
de las pruebas del men´u por medio de la funci´on. Ticker.
Inicializaci´on de Tabla que contiene una se˜nal sinusoidal para la construcci´on de la
se˜nal.
Inicializaci´on de m´ultiples variables utilizadas en el programa.
Programa principal
El bloque de programa principal se ejecuta luego de la configuraci´on inicial del
microcontro-lador. ´Este programa se ejecuta en un bucle a la espera de la elecci´on de una de las pruebas
ya preestablecidas. Para la selecci´on de alguna de las pruebas el programa recibe un char
enviado a trav´es del puerto serial, y seg´un la letra correspondiente al char se realizar´a la
respectiva prueba.
2.1.4.
Respuesta al escal´
on
Luego de escoger la respuesta al escal´on como prueba a realizar, el programa espera una
cade-na de strings que indican los par´ametros de inicializaci´on, en esta prueba el ´unico par´ametro
que se necesita es la amplitud del escal´on como se muestra en la Figura2-2, donde se recibe
un string con las siguientes caracter´ısticas %f\0”donde %f es un float que contiene la
2.1 Adquisici´on y Envi´o de datos 21
del escal´on de forma serial, dicho dato se coloca en la salida digital del microcontrolador de
forma permanente, ya que ´este es un escal´on y su valor de salida no var´ıa.
Figura 2-2: Parametros de Configuraci´on Prueba Respuesta al Escalon
Tabla 2-2: Rango de voltajes Configurables respuesta al escal´on seg´un Planta.
Rango de Voltajes Configurables Prueba Respuesta al Escal´on Planta de Velocidad -10.0 V a 10.0 V
Planta T´ermica 0.0 V a 10.0 V
Subrutina de Interrupci´on Respuesta al Escal´on planta de Temperatura
Posteriormente se configura la subrutina por interrupci´on cada 5 segundos para el muestreo
y envi´o de la se˜nal, este tiempo se eligi´o como base de muestreo seg´un la velocidad de
res-puesta de la planta, mostrada en la anterior secci´on.
Dentro de la interrupci´on se realizan las siguientes tareas:
Se Muestrea la se˜nal de entrada.
Se toma el valor de tiempo actual con referencia en el inicio de la se˜nal escal´on.
Se establece un Identificador de muestra ´unico e irrepetible para esa muestra.
Por ´ultimo se env´ıa un string concatenado con los siguientes valores separados por
comas: Tiempo de la muestra, Referencia del Escal´on, se˜nal con la respuesta al escal´on
22 2 Adquisici´on de datos y Acondicionamiento de se˜nal
Subrutina de Interrupci´on Respuesta al Escal´on planta de Velocidad
A diferencia de la subrutina de interrupci´on de la planta de temperatura y dado que la planta
de velocidad tiene una respuesta temporal mucho m´as r´apida, el tiempo de muestreo para
esta planta es de 1 ms.
Dentro de la interrupci´on se realizan las siguientes tareas:
Se Muestrea la se˜nal de entrada.
Se toma el valor de tiempo actual con referencia en el inicio de la se˜nal escal´on.
Se establece un Identificador de muestra ´unico e irrepetible para esa muestra.
Se guardan los valores de tiempo de la muestra, voltaje de entrada y voltaje de salida, en cada uno de los 300 espacios de los vectores correspondientes a tiempo de la muestra, voltaje de entrada y voltaje de salida.
Luego de recibir todos los datos de la prueba se coloca la salida del DAC en 0V y se env´ıan todas las muestras almacenadas en los vectores, para esto se utiliza un ciclo
“for” que direcciona cada posici´on desde el primero hasta el ´ultimo valor y env´ıa por
el puerto serial en un intervalo de 0.1 ms para que los datos puedan ser procesados por el servidor local para luego ser enviados por internet en un string concatenado que contiene los siguientes valores separados por comas: Tiempo de la muestra, Referencia
del Escal´on, se˜nal con la respuesta al escal´on de la planta, identificador.
2.1.5.
Respuesta en frecuencia
Al igual que en la prueba de la respuesta al escal´on, el programa espera un string que le
indique los par´ametros de inicializaci´on, en esta prueba se necesitan 3 par´ametros como se
muestra en la Figura 2-3, los cuales son: la amplitud pico a pico de la se˜nal de referencia,
el offset de esta se˜nal y la frecuencia. El string que se recibe para la configuraci´on de la
prueba se muestra de la siguiente manera (” %f, %f, %f\0”) donde el primer %f es un float
que contiene la amplitud pico a pico de la se˜nal seno, el siguiente %f es un float que contiene
el offset, y el ultimo %f contiene la frecuencia de la se˜nal seno.
Luego de recibir la amplitud pico a pico, el offset y la frecuencia, se establece el tiempo
nece-sario para ejecutar las interrupciones, en este caso la interrupci´on depende de la frecuencia
a la cual se desee hacer la prueba y del n´umero de muestras almacenadas en la tabla que
contiene la se˜nal seno. Ya que dicha se˜nal esta almacenada en un vector con 128 muestras.
El tiempo de muestreo para la subrutina de interrupci´on es
T = 1
f recuencia·128. (2-1)
Cumpliendo con ´este tiempo de muestreo para la ejecuci´on de la subrutina, se garantiza
2.1 Adquisici´on y Envi´o de datos 23
Figura 2-3: Parametros de Configuraci´on Prueba Respuesta en Frecuencia
las muestras de la se˜nal seno en el intervalo correcto para que cumplan con la frecuencia
requerida.
Los posibles intervalos para la configuraci´on de la prueba de frecuencia se muestran en la
Tabla 2-3.
Tabla 2-3: Rango de Valores Configurables para Prueba de Respuesta en frecuencia
Rango de Voltaje Pico a Pico Rango niveles de offset Rango de frecuencias Planta de Velocidad 0.0 V a 20.0 V -8 V a 8V 0.2Hz a 40Hz
Planta T´ermica 0.0 V a 10.0 V 2 V a 5 V 0.0002Hz a 0.009 Hz
Subrutina de Interrupci´on Respuesta en frecuencia planta de Temperatura
Dentro de la subrutina de interrupci´on de la planta t´ermica, lo primero que hace el programa
es direccionar la posici´on correspondiente de cada una de las 128 muestras de la se˜nal seno
empezando por la primera posici´on de esa se˜nal, y enviando posteriormente dicha muestra al
pin DAC, cuando los 128 datos de la tabla ya han sido direccionados, la subrutina vuelve a
direccionar desde la primera posici´on de la tabla de la se˜nal seno, debido a su periodicidad,
luego se hace el muestreo correspondiente a la se˜nal proveniente de la planta, al igual que
en el caso anterior se toma el tiempo en que inicio la prueba y se genera un identificador de
muestras. Todos estos datos se agrupan y concatenan para ser enviados a trav´es del m´odulo
serial, en un string separados por comas de la siguiente manera: (” %f, %f, %f, %d”); donde el primer %f es un float que contiene el tiempo de la muestra desde el inicio de la prueba, el
siguiente %f es un float que contiene la se˜nal enviada por el microcontrolador, en este caso
la se˜nal seno enviada desde una tabla, el tercer %f contiene la se˜nal muestreada de la salida
24 2 Adquisici´on de datos y Acondicionamiento de se˜nal
n´umero identificador, que tiene como objetivo determinar que numero de muestra pertenece
cada dato enviado.
Subrutina de Interrupci´on Respuesta en frecuencia planta de velocidad
En la subrutina de interrupci´on temporizada de la planta de velocidad tambi´en se realiza
un direccionamiento para extraer los valores de la tabla que contiene la se˜nal seno, en cada
entrada a la subrutina se toma un valor de la tabla y se env´ıa por el pin configurado con el DAC, y a su vez se toma el valor correspondiente de la entrada configurada con el ADC, estos valores junto con el tiempo de la muestra son almacenados en 3 vectores de 300 posiciones de longitud.
Cuando la subrutina ingresa por ´ultima vez y ya ha llenado las 300 posiciones de los 3
vecto-res, el programa a trav´es de un ciclo “for” env´ıa un string cada 100 ms que es la concatenaci´on
de los valores de cada uno de los vectores, y lo hace de la siguiente manera y separado por comas (” %f, %f, %f, %d”); donde el primer %f es un float que contiene el tiempo de la
mues-tra desde el inicio la prueba, el siguiente %f es un float que contiene la se˜nal enviada por el
microcontrolador, en este caso la se˜nal seno enviada desde una tabla, el tercer %f contiene la
se˜nal muestreada de la salida de la planta, es decir la respuesta de la planta, y por ´ultimo se
concatena el %d, el cual es el n´umero identificador que tiene como objetivo determinar que
n´umero de muestra pertenece cada dato enviado.
2.1.6.
Controlador On Off
La subrutina del controlador on-off se ejecuta luego de recibir un char ‘c’ en el men´u principal,
al ejecutarse se reciben 2 par´ametros que se encuentran dentro del string para la configuraci´on
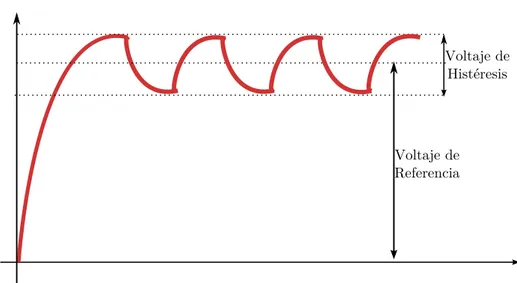
del controlador on-off, el primero de esos par´ametros es la se˜nal de referencia del controlador,
el segundo par´ametro es la hist´eresis. La hist´eresis es la ventana de voltaje en la cual oscila
2.1 Adquisici´on y Envi´o de datos 25
Figura 2-4: Par´ametros de Configuraci´on Prueba Controlador ON-OFF
El tiempo de muestreo para la planta de Temperatura para hacer el control on-off en esta prueba es de 2 s, y el tiempo de muestreo para la planta de velocidad es de 0.3 ms, los rangos
de par´ametros configurables para este controlador se muestran en la Tabla 2-4.
Tabla 2-4: Rango de Valores Configurables para Prueba de Controlador On-Off
Rango de Voltaje de Referencia Rango de voltaje de Hist´eresis Planta de Velocidad -10.0 V a 10.0 V 0.1 V a 4 V
Planta T´ermica 0.0 V a 10.0 V 0.1 V a 4 V
Subrutina de Interrupci´on del controlador ON-OFF de la planta de temperatura.
En el programa de la subrutina temporizada se ejecuta cada 2 segundos con la l´ogica del
controlador on-off como se puede ver en la Figura 2-5, este algoritmo se ejecuta cada vez
que la subrutina de interrupci´on es llamada y emula el comportamiento de un controlador
26 2 Adquisici´on de datos y Acondicionamiento de se˜nal
Figura 2-5: Diagrama Flujo Controlador ON-OFF planta de temperatura
Para la planta de temperatura al igual que en los anteriores casos, los datos de entrada y salida de la planta son tomados y enviados cada vez que el programa entra en la subrutina de
interrupci´on, estos datos son concatenados junto con la variable de tiempo y el identificador
de la muestra.
Subrutina de Interrupci´on del controlador ON-OFF de la planta de velocidad.
Esta subrutina se ejecuta cada 0.3 ms, la l´ogica de ejecuci´on se muestra en la Figura 2-6, a
diferencia de la planta de temperatura la l´ogica del programa se extiende ya que los valores
2.1 Adquisici´on y Envi´o de datos 27
Figura 2-6: Diagrama Flujo Controlador ON-OFF planta de velocidad
Para la planta de velocidad al igual que en las pruebas anteriores, se acumulan los datos en vectores de voltaje de entrada, voltaje de salida, tiempo, y el identificador, para luego ser direccionados y enviados de manera concatenada en un string mediante un ciclo “for”.
2.1.7.
Controlador Digital
La subrutina del controlador Digital se ejecuta al recibir por el puerto serial un char ‘d’ en
el men´u principal, los par´ametros que recibe este controlador son 10 en total, los cuales son:
referencia, tiempo de muestreo, los cuatro coeficientes del numerador del controlador y los cuatro coeficientes del denominador del controlador mostrado en (2-2).
Los rangos de valores permitidos para la configuraci´on del controlador se muestran en la
28 2 Adquisici´on de datos y Acondicionamiento de se˜nal
muestreo utilizado para la subrutina de interrupci´on, debido a que se requieren tomar m´as
muestras para la visualizaci´on de la se˜nal, el tiempo de muestreo base para la planta de
velocidad es de 1 ms y el tiempo de muestreo base para la planta de temperatura es de 5 s,
los tiempos de muestreo configurables por el usuario deben ser m´ultiplos enteros del tiempo
de muestreo base.
C(z) = b0Z
0+b
1Z−1+b2Z−2+b3Z−3
a0Z0+a1Z−1+a2Z−2+a3Z−3
. (2-2)
Tabla 2-5: Rango de valores Configurables en el controlador Digital.
Rango de Voltaje de Referencia Rango de tiempos de muestreo Rango de valores para coeficientes Planta de Velocidad -10.0 V a 10.0 V 0.001s a 0.01s No determinado
Planta T´ermica 0.0 V a 10.0 V 30s a 100s No determinado
Subrutina de Interrupci´on Controlador Digital Planta de Temperatura
Para el controlador digital de la planta de temperatura la subrutina de interrupci´on se
eje-cuta cada 5 s, dentro de esta subrutina se realizan las siguientes tareas:
Leer el puerto adc del microcontrolador de la se˜nal proveniente de la planta y
decre-mentar el contador asociado a submuestreo.
Obtener el tiempo y el identificador de la muestra actual.
Enviar a trav´es del puerto serial un string concatenado con la informaci´on de tiempo
de la muestra, referencia, entrada ADC e identificador.
Verificar si la entrada a la subrutina corresponde al tiempo de muestreo seleccionado
por el usuario para que se ejecute la acci´on de control. Si es as´ı se ejecuta la acci´on de
control mediante la implementaci´on de una ecuaci´on de diferencias.
Subrutina de Interrupci´on Controlador Digital Planta de Velocidad
En el caso del controlador digital para la planta de velocidad, la subrutina de interrupci´on
se activa cada un milisegundo (1 ms), y tiene un flujo de programa similar al ya mostrado en la subrutina de la planta de temperatura.
Primero se lee la se˜nal proveniente de la planta por puerto adc del microcontrolador
2.2 Acondicionamiento de se˜nal 29
Si no se han completado los vectores que guardan las variables de tiempo e identifi-cador, se obtiene las variables de tiempo e identificador en la muestra actual, y son
almacenados en sus correspondientes vectores, al igual que la se˜nal de referencia.
Si el contador asociado al submuestreo coincide con el m´ultiplo de tiempo de muestreo
base, se ejecuta la acci´on de control digital correspondiente con la implementaci´on de
la ecuaci´on de diferencias.
Si el programa ha entrado a la subrutina 300 veces y por lo tanto se han llenado todos los vectores, el programa procede a enviar todos los datos de cada una de las mues-tras almacenadas en los vectores mediante un ciclo “for”, en este ciclo se direccionan cada una de las muestras, se concatenan y se env´ıan cada 100 ms. las variables son:
Identificador, tiempo de muestreo, se˜nal de entrada y se˜nal de salida.
2.2.
Acondicionamiento de se˜
nal
Debido a que el sistema embebido seleccionado no puede ser directamente conectado a la
se˜nal de salida de las plantas de velocidad y de temperatura, a causa de que est´as se˜nales
tienen un nivel de tensi´on superior al permitido en los m´odulos ADC de dicho sistema
embe-bido, el cual es de 3.3 V; tambi´en, el sistema embebido tiene como funcionalidad generar las
se˜nales de entrada de las plantas por medio del m´odulo DAC, pero ´este tiene una limitaci´on,
ya que la m´axima tensi´on proporcionada por el DAC es de 3.3 V.
Para dar soluci´on a este inconveniente se construye una etapa de acondicionamiento de
se˜nales de entrada y salida de las plantas de velocidad y temperatura. Lo primero que hay
que conocer y tener muy presente son los niveles de tensi´on l´ımite en la entrada y salida de
estas plantas. En la Tabla 2-6se muestra estos niveles de tensi´on.
Tabla 2-6: Niveles de voltaje limite en entradas y salidas de las plantas.
Planta Entrada [V] Salida [V] M´odulo ADC Embebido [V] M´odulo DAC Embebido [V] Temperatura 0-12 0-12 0-3.3 0-3.3
Velocidad (-12)-(-12) (-10)-(-10) 0-3.3 0-3.3
Un punto a tener en consideraci´on, es que dentro de esta etapa de acondicionamiento se
adiciona unos filtros activos para reducir el ruido en las se˜nales de salida de las plantas. Por
otro lado, se debe aclarar que en la planta de temperatura, se dispone de dos entradas de voltaje, una es la entrada que alimenta al bombillo y la otra entrada es la que alimenta al
ventilador, esta entrada esta fija a un solo nivel de tensi´on, el cual es de 12 V en estado
activo. Tambi´en, es importante aclarar que para el acondicionamiento se utilizan
amplifi-cadores operacionales, por lo tanto, es necesario tener en cuenta cuales son los voltajes de
30 2 Adquisici´on de datos y Acondicionamiento de se˜nal
Dado que se adquirieron unas fuentes de 12 V y 3 A, las cuales fueron conectadas en serie
de tal forma que proporcionaran una alimentaci´on de tensi´on de ±13 V. Se debe aclarar que
los OP-AMP que se utilizan en esta etapa son los de referencia lM358 [11].
Ya teniendo en cuenta todas estas aclaraciones, se procede al dise˜no de la etapa de
acon-dicionamiento, la cual est´a conformada por un circuito que reduce las se˜nales de salida y
amplifica las se˜nales de entrada de las plantas.
2.2.1.
Dise˜
no de acondicionamiento para entrada y salida de la
planta de velocidad
Como se establece en la Tabla2-6, la entrada de la planta de velocidad acepta una se˜nal de
voltaje del rango de -12 V a 12 V, y la se˜nal de voltaje que proporciona el m´odulo DAC del
sistema embebido seleccionado es de 0 V a 3.3 V.
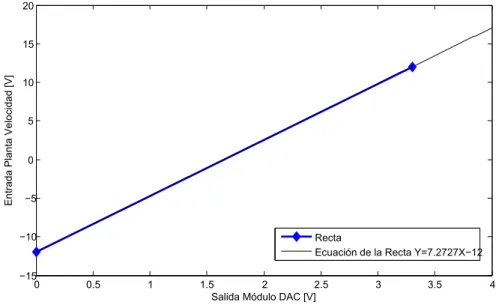
En la Figura2-7 se muestra la relaci´on salida m´odulo DAC vs entrada planta de velocidad.
Figura 2-7: Relaci´on, Salida m´odulo DAC vs Entrada planta de velocidad.
Lo que nos muestra la Figura 2-7 se interpreta as´ı: para una tensi´on de salida de m´odulo
DAC del sistema embebido de 0 V, en la entrada de la planta de velocidad se presenta un
voltaje de -12 V, as´ı mismo, para una tensi´on de salida del m´odulo DAC de 3.3 V, en la
entrada de la planta de velocidad se presenta un voltaje de 12 V.
En la Figura 2-8 se representa el bloque de acondicionamiento, donde Vi, es el voltaje
2.2 Acondicionamiento de se˜nal 31
Figura 2-8: Bloque de acondicionamiento entrada planta de velocidad.
La ecuaci´on de la recta pendiente generada en la Figura 2-7 es y = 7,2727x−12, lo que
indica es que Vo = 7,2727Vi−12, para hacer relaci´on con la Figura2-8.
Para resolver la ecuaci´on de la recta pendiente genera por la relaci´on de voltajes del bloque
de acondicionamiento, se utilizan los conceptos y procedimientos proporcionados en [12] [13].
El circuito necesario para resolver la ecuaci´on generada por la recta pendiente, es el
amplifi-cador multientrada universal o mejor conocido como sumador - restador que se muestra en
la Figura 2-9.
El sumador - restador es la configuraci´on universal del amplificador operacional. Al reunir
el sumador y el restador en un s´olo circuito, donde se obtienen un sistema multientradas
m´as vers´atil, pues permite combinar se˜nales con posibilidad de escoger no s´olo el valor sino
tambi´en el signo de sus respectivos pesos [12].
Figura 2-9: Amplificador multientradas o Sumador-Restador [12].
En la Figura 2-9se ilustra el diagrama de un sumador - restador con n entradas inversoras
y m entradas no inversoras.