Aplicación de algoritmos de localización de fallas en líneas de transmisión
8
0
0
Texto completo
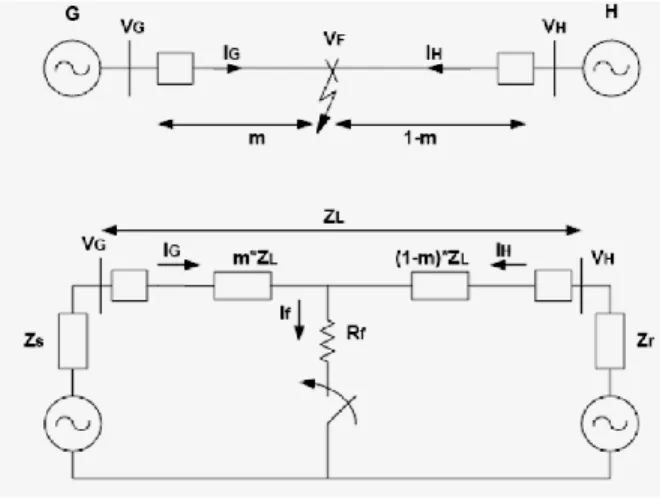
(2) CIE2015. de fase o las de secuencia. Se analizarán 4 algoritmos muy difundidos para la localización de fallas en las LT: Reactancia, Takagi, Eriksson, Schweitzer [4,5,6,7]. Para hacer una estimación de localización de la falla, los parámetros y factores utilizados se describen en la siguiente figura.. 2. La superposición de corrientes se escribe como: (3) Se define un factor de distribución de la corriente “ds” como: (4). Se plantea un factor de carga del circuito “ns” que está dado por (5). Sustituyendo en las ecuaciones se obtiene: (6). Fig. 1: Sistema equivalente de una LT con fuentes en ambos extremos Donde: G: Subestación G H: Subestación H m: Longitud de la línea desde la Sub G hasta la falla en pu. Zl: Impedancia de secuencia positiva de la línea. Rf: Resistencia de falla If: Corriente de falla IG: Corriente de la fase fallada que aporta la subestación G VG: Voltaje de la fase fallada en la subestación G Zs o ZG: Impedancia interna de la fuente equivalente en la Sub G Zr o ZH: Impedancia interna de la fuente equivalente en la Sub H. Por lo tanto el ángulo de la razón de las corrientes If / IG determina la componente reactiva de la resistencia de falla y está determinado por dos factores. El primer término “ds” es un factor de distribución de corrientes, que está dado por las impedancias del sistema. El segundo término “ns” considera un flujo de carga de pre-falla en el sistema, por lo tanto el ángulo de este factor es diferente de cero siempre y cuando exista un flujo de pre-falla. Sin embargo en el caso de una falla la magnitud de “IG” es bastante mayor que la corriente de carga “IL” por lo tanto el ángulo "γ” se aproxima a cero. El ángulo (β+γ) determina la componente reactiva de la resistencia de falla Rf.. La caída de voltaje desde el terminal G sería (1) Dividiendo por IG (2). La relación If / IG es un número complejo que tiene una componente reactiva, que puede ser capacitiva o inductiva y que hace que la resistencia de falla se vea como una impedancia de falla; cuyo valor será cero solamente si el ángulo es cero, es decir cuando If este en fase con IG. Se puede inducir que esta componente reactiva produce un error en la estimación de la localización de la falla. Para analizar cómo afecta el ángulo de If / IG se pueden superponer los dos sistemas, el de pre-falla y el sistema fallado, donde “IL” representa la corriente de pre-falla.. Fig. 2. Error que se produce debido a la componente reactiva If / IG en la estimación de la localización de falla.. ALGORITMO DE REACTANCIA SIMPLE. El algoritmo de reactancia fue uno de los primeros en tratar de compensar el error de la medida de la.
(3) CIE2015. resistencia de falla, midiendo solamente la parte imaginaria de la impedancia, asumiendo que Rf tiene un valor muy pequeño y se desprecia este término de la ecuación de estimación de la impedancia a la falla [7,8].. 3. Igualando a cero la ecuación se obtiene una ecuación cuadrática para “m” (14). (7) Trabajando con las ecuaciones: se despeja “m” y se analiza solamente la parte imaginaria de la impedancia para obtener la distancia de falla.. La ecuación cuadrática se separa en sus partes real e imaginaria y se resuelve para “m”.. (8). ALGORITMO DE TAKAGI. Se mejora el algoritmo con la eliminación de la corriente de carga de pre-falla, determinando una variación de la corriente cuando ocurre la falla A partir de las ecuaciones anteriores se puede plantear: (9). Al multiplicar los dos lados de la ecuación por el conjugado de. (15). ALGORITMO DE SCHWEITZER. Se ha desarrollado este algoritmo de los dos extremos que en principio es similar al algoritmo de un terminal de red, con la particularidad que se pueden plantear dos ecuaciones con los datos de los dos extremos y eliminar la variable del voltaje de falla [7,9]. Se puede escribir una ecuación de malla para cada extremo de la línea y de esta manera determinar la distancia de falla. (16). se obtiene:. (17) (10). Si se extrae solamente la parte imaginaria se tiene: (11). (18). Sustituyendo “Vf” en las dos primeras ecuaciones, despejándolo e igualándolo a partir de dichas ecuaciones, se puede encontrar una expresión para “m”. El ángulo del factor de distribución de la corriente es cercano a cero cuando se trata de un sistema de similares características a los dos extremos de la red. Por lo tanto si se despeja la distancia de falla “m” en (pu).. (19) Resolviendo para “m” se obtiene: (20). (12). ALGORITMO DE ERIKSSON. Busca obtener una ecuación a partir de una reducción de toda la red, incluyendo dentro de esta las impedancias de las fuentes equivalentes a los dos extremos de la línea. (13). APLICACIÓN ALGORITMOS FALLAS.. PRÁCTICA DE DE LOCALIZACIÓN. LOS DE. Cada algoritmo utilizado adquiere y procesa datos de acuerdo a una lógica establecida, haciendo una estimación de la distancia a la falla con mayor o menor error, acorde a las suposiciones o simplificaciones en que se basa para los cálculos, distancia a la falla, impedancia de falla y otros factores [4,5,7]..
(4) CIE2015. Para analizar el comportamiento de estos algoritmos, se realizó su programación en MATLAB y se aplicaron en la simulación de fallas en la línea de transmisión del Norte de Angola, mediante el programa Power System Explorer (PSX). Dicha línea de transmisión es de 110kV y longitud de 66 km, entre la subestación de la Central Hidroeléctrica de Capanda y la subestación Cacuso, equipada con protección de distancia 21 y 21N de la Siemens 7SA611; posteriormente entrará en funcionamiento una planta de generación de biocombustible (BIOCOM) conectada a la subestación Cacuso, lo que provocaría entonces una alimentación considerable a la falla por ambos extremos de la línea. Las simulaciones de fallas se realizaron a tres distancias: 0.25, 0.50 y 0.75 de la longitud total de la línea medida desde Capanda y con resistencia de falla variando 0 a 20 Ω, primero sin conectar la planta BIOCOM y luego con esta conectada en la subestación de Cacuso. En las tablas siguientes se muestran algunas de las corrientes y tensiones de cortocircuito, obtenidas a partir de las simulaciones de cortocircuitos con el programa PSX a 25, 50 e 75% de la longitud total de la línea sin y con la Central BIOCOM, sin y con impedancia de falla Rf = 20Ω.. 4. Tabla 3: Para falla al 50 % sin Biocom y Rf = 0Ω. Corrientes y tensiones de envío en barra de Capanda al 50% (kA y kV). Corrientes y tensiones de recibo en barra de Cacuso al 50% (kA y kV). Tabla 4: Para falla al 50 % con Biocom y Rf = 0Ω. Corrientes y tensiones de envío en barra de Capanda al 50% (kA y kV). Corrientes y tensiones de recibo en barra de Cacuso al 50% (kA y kV). Tabla 5: Para falla al 75 % sin Biocom y Rf = 0Ω. Corrientes y tensiones de envío en barra de Capanda al 75% (kA y kV). Tabla 1: Para falla al 25% sin Biocom y Rf = 0Ω. Corrientes y tensiones de envío en barra de Capanda al 25% (kA y kV). Corrientes y tensiones de recibo en barra de Cacuso al 75% (kA y kV). Corrientes y tensiones de recibo en barra de Cacuso al 25% (kA y kV). Tabla 6: Para falla al 75 % con Biocom y Rf =20Ω. Corrientes y tensiones de envío en barra de Capanda al 75% (kA y kV) Tabla 2: Para falla al 25 % sin Biocom y Rf = 20Ω. Corrientes y tensiones de envío en barra de Capanda al 25% (kA y kV). Corrientes y tensiones de recibo en barra de Cacuso al 75% (kA y kV) Corrientes y tensiones de recibo en barra de Cacuso al 25% (kA y kV).
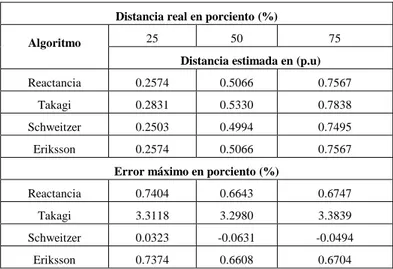
(5) CIE2015. Resultados de la aplicación de los algoritmos de localización de falla en las principales variantes analizadas. Tabla 7: Resultados de cada algoritmo de localización de falla sin Biocom con Rf = 0Ω.. Tabla 9: Resultados obtenidos usando los algoritmos de localización de fallas con el surgimiento de la Central Térmica Biocom y Rf= 0Ω. Distancia real en porciento (%) Algoritmo. 25. Distancia real en porciento (%) Algoritmo. 25. 5. 50. 75. Distancia estimada en (p.u). 50. 75. Reactancia. 0.2497. 0.5002. 0.7489. Distancia estimada en (p.u). Takagi. 0.2497. 0.5002. 0.7489. Reactancia. 0.2502. 0.4997. 0.7502. Schweitzer. 0.2500. 0.4999. 0.7498. Takagi. 0.2502. 0.4997. 0.7503. Eriksson. 0.1610. 0.2563. 0.3262. Schweitzer. 0.2502. 0.4997. 0.7503. Eriksson. 0.2502. 0.4997. 0.7502. Error máximo en porciento (%) Reactancia. 0.0194. -0.0343. 0.0233. Takagi. 0.0201. -0.0328. 0.0255. Schweitzer. 0.0232. -0.0267. 0.0341. Eriksson. 0.0193. -0.0332. 0.0222. En la tabla 7 se observa el buen comportamiento de cada algoritmo, al tener alimentación solo por un extremo de la línea y la falla limpia. Tabla 8: Resultados de cada algoritmo de localización de falla sin Biocom con Rf = 20Ω. Distancia real en porciento (%) Algoritmo. 25. 50. 75. Reactancia. 0.2574. 0.5066. 0.7567. Takagi. 0.2831. 0.5330. 0.7838. Schweitzer. 0.2503. 0.4994. 0.7495. Eriksson. 0.2574. 0.5066. 0.7567. Distancia estimada en (p.u). Error máximo en porciento (%) Reactancia. 0.7404. 0.6643. 0.6747. Takagi. 3.3118. 3.2980. 3.3839. Schweitzer. 0.0323. -0.0631. -0.0494. Eriksson. 0.7374. 0.6608. 0.6704. Como se observa en la tabla 8 la resistencia de falla puede causar un aumento significativo en el margen de error en la localización del punto de falla. Sin embargo, con el surgimiento de la Central Térmica de Biocom la corriente y la tensión en la falla se hace mayor, además existe flujo de potencia en los dos sentidos y hay un desfasaje entre la corriente y la tensión de ambos extremos, la localización del punto de fallo se torna más complicada, exigiendo ajustes en las protecciones de la línea. Algunos resultados obtenidos en la localización de la falla con Biocom conectada se muestran a continuación a partir de la tabla 9.. Error máximo en porciento (%) Reactancia. -0.267. 0.0174. -0.1071. Takagi. -0.0266. 0.0173. -0.1077. Schweitzer. -0.0018. -0.0134. -0.0238. Eriksson. -8.9022. -24.3654. -42.3801. En la tabla 9, se puede observar como casi todos los algoritmos presentan un comportamiento aceptable y preciso para fallas limpias, esto se explica porque para este tipo de fallos se cumplen las aproximaciones requeridas por los algoritmos, sin embargo los errores mayores se observan en el algoritmo de Eriksson. Importa realzar que muchos factores de la falta de precisión en la localización por el algoritmo de Eriksson están en su basamento, como son: la impedancia de las fuentes usadas en las simulaciones puede ser diferente de la impedancia tomada en la barra de 110kV para un cortocircuito trifásico, la impedancia de la línea no es uniforme a lo largo de la línea, lo cual afecta directamente para medir correctamente la impedancia de secuencia positiva vista por el relé [8,9]. Tabla 10: Resultados obtenidos usando los algoritmos de localización de fallas con surgimiento de la Central Térmica Biocom y Rf = 20Ω. Distancia real en porciento (%) Algoritmo. 25. 50. 75. Distancia estimada en (p.u) Reactancia. 0.1675. 0.2893. 0.3032. Takagi. -1.2695. -1.4377. -1.4545. Schweitzer. 0.2502. 0.4999. 0.6867. Eriksson. 0.4473. 0.5152. 0.5681. Error máximo en porciento (%) Reactancia. -8.2527. -21.0664. -38.8037. Takagi. -151.9493. -193.7696. -248.6431. Schweitzer. 0.0233. -0.0141. 0.0085. Eriksson. 19.7273. 1.5183. -18.1883.
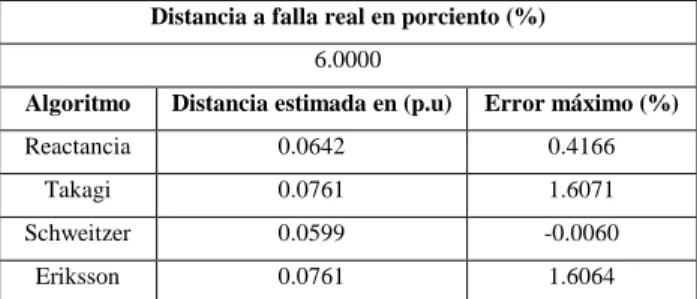
(6) CIE2015. Se observa en la tabla 10 que para fallos de alta impedancia y sobretodo distantes de las subestaciones, el error comienza a ser grande y presenta un comportamiento creciente significativamente, fundamentalmente para el algoritmo de Reactancia y Takagi. Esto es debido a que, las suposiciones que se hacen para dichos algoritmos de localización no se cumplen por la presencia de la impedancia de fallo, cuyo efecto es una diferencia en los ángulos de las corrientes de fallo vista desde cada subestación y por la pequeña diferencia angular en la tensión que existe en cada uno de los extremos de la línea. Aunque el error del algoritmo de Eriksson se mantiene se observa un mejor comportamiento con relación al algoritmo de Reactancia y Takagi; para estas condiciones el algoritmo con mejor resultado es el de Schweitzer. Resultados y análisis de un registro de fallo real. Por último se simuló un fallo real ocurrido el 18 de Noviembre de 2011 en la línea a 4 km de Capanda, se compararon los resultados de cada algoritmo con y sin impedancia de falla y se analizó como ocurriría cuando se conecta la Central Térmica de Biocom.. 6. Tabla 12 – Resultados obtenidos usando un registro de fallo real, bifásica a 4km de la subestación de Capanda con Rf = 20Ω, sin la Central Térmica de la Biocom. Distancia a falla real en porciento (%) 6.0000 Algoritmo. Distancia estimada en (p.u). Error máximo (%). Reactancia. 0.0642. 0.4166. Takagi. 0.0761. 1.6071. Schweitzer. 0.0599. -0.0060. Eriksson. 0.0761. 1.6064. Se observa un aumento del error en el algoritmo de Reactancia, Takagi y Eriksson lo que no ocurre con el algoritmo de Schweitzer. Ahora se supone que la Central Térmica de Biocom está conectada la subestación de Cacuso, el comportamiento de cada algoritmo de localización de fallo será como se muestra en la tabla 13. Tabla 13: Resultados obtenidos usando un registro de fallo, bifásica a 4km de la subestación de Capanda con el surgimiento de la Central térmica de Biocom, con Rf = 0Ω. Distancia a falla real en porciento (%) 6.0000. Tabla 11 – Resultados obtenidos usando un registo de fallo real bifásica a 4 km de la subestación de Capanda (6 % de la línea), sin la Central Térmica de Biocom y con Rf= 0Ω. Distancia a falla real en porciento (%). Algoritmo. Distancia estimada en (p.u). Error máximo (%). Reactancia. 0.0598. -0.0222. Takagi. 0.0598. -0.0201. 6.0000. Schweitzer. 0.0599. -0.0131. Eriksson. 0.0522. -0.7762. Algoritmo. Distancia estimada en (p.u) Error máximo (%). Reactancia. 0.0600. 0.0018. Takagi. 0.0600. 0.0018. Schweitzer. 0.0600. 0.0012. Eriksson. 0.0600. 0.0018. Se puede observar en la tabla 11, que sin conectar la Central Térmica de la Biocom a Cacuso y suponiendo que Rf es igual a cero, los errores de los algoritmos se muestran pequeños (incluso no mostrados con esos lugares decimales) para el fallo bifásico próximo al extremo de Capanda (a 4Km). Si el fallo ocurre a través de una variación en la resistencia de fallo Rf aproximadamente a 20Ω, entonces los resultados anteriores se alteran como se observa en la tabla siguiente.. Si se conecta la Central Térmica de Biocom, para dicho cortocircuito con resistencia de falla Rf de 20Ω, los resultados se muestran en la tabla 14. Tabla 14: Resultados obtenidos usando un registo de falla real, bifásica a 4km de la subestación de Capanda con el surgimiento de la Central Térmica de Biocom, con Rf = 20Ω. Distancia a falla real porciento (%) 6.0000 Algoritmo. Distancia estimada en (p.u). Error máximo (%). Reactancia. 0.1987. 13.8656 15.4279. Takagi. 0.2143. Schweitzer. 0.0602. 0.0161. Eriksson. 0.1836. 12.3584. Los errores van aumentando fundamentalmente en los algoritmos que toman la señal de un solo extremo como los algoritmos de Reactancia y Takagi; el algoritmo de Eriksson sin embargo, utiliza información de la reactancia de las fuentes de los dos extremos de la línea, pero el error en la estimación de dichas impedancias equivalentes afecta su exactitud en la localización de la.
(7) CIE2015. falla. El algoritmo de Schweitzer al tomar los datos de los dos extremos presenta un mejor desempeño. En resumen, se observa desde un análisis comparativo el desempeño de cada algoritmo de localización de fallas para una falla real bifásica y se nota inequívocamente de forma concisa, como cada algoritmo localiza el punto de falla y su comportamiento en las situaciones en que línea Capanda - Cacuso es sometida a falla sin y con la conexión de la Central Térmica de Biocom en la subestación de Cacuso. Por consiguiente, el error máximo por cada algoritmo de localización de fallas muestra como el algoritmo de Schweitzer presenta mejor desempeño en la localización del punto de falla, tanto para fallas francas o de baja impedancia, como para las de alta impedancia. Importa rememorar que el algoritmo de Reactancia Simple no lleva en cuenta la resistencia de falla, por lo que cuando ésta aumenta, aumenta también el error del algoritmo en la localización del punto de falla, tal como se observó en los casos anteriores. El algoritmo de Takagi, sin embargo es más preciso cuando la corriente de falla que se ve desde Capanda está en fase con la corriente total de falla. Por un lado, el algoritmo de Eriksson no es sensible al efecto reactivo dado por If /IG en la resistencia de falla, ni por el ángulo de factor de distribución de corriente cuando existe alimentación por los dos extremos (cuando se conecta Biocom), incluyendo la fallas de alta impedancia o distantes de la ubicación del localizador de fallas, pero su error se ve incrementado grandemente al simular la impedancia equivalente de las fuentes conectadas en los extremos de la línea, las cuales tienden a variar con el estado de operación de la red, con la conexión y desconexión de unidades generadores, transformadores, líneas, etc. De otro lado, el algoritmo de Schweitzer es más preciso porque al analizar la información proveniente de los dos extremos de la línea en falla, reduce el error por la resistencia de falla Rf, el efecto reactivo de la relación If/IG, el efecto de carga, y además no necesita prácticamente variación en su aplicación para diferentes tipos de fallas, de lo que su limitación está dada por la necesidad de disponibilidad de datos sincronizados a partir de la comunicación de ambos extremos de la línea en falla para su aplicación on line. III. CONCLUSIONES 1. Existen varios métodos para localización de fallos en líneas de transmisión, actualmente se utilizan unos u otros dependiendo de los equipos disponibles y la precisión requerida. 2. Todos los algoritmos presentan una precisión aceptable en la localización del punto de fallo, según la. 7. distancia a que ocurren el fallo en la línea. Se puede notar la precisión razonable de los localizadores en fallos de baja impedancia y a corta distancia de la ubicación del relé. De otro lado, se observan grandes deficiencias en la precisión para fallos de alta impedancia, para algunos algoritmos. 3. Cada algoritmo de localización de fallo presenta ventajas o desventajas con relación al otro. 4. Para fallos de alta impedancia el algoritmo del Takagi presenta errores elevados (debido a la corriente de carga cuyo valor en ocasiones no es fácil de estimar), con relación al algoritmo de la Reactancia. Mientras tanto importa realzar, que en otras situaciones dependiendo da características de la línea el algoritmo del Takagi tendría igual o mejor desempeño. 5. El algoritmo del Eriksson a pesar de ser uno de los algoritmos de dos extremos más exactos y estudiados, para el caso en estudio, no sería el más adecuado, debido que la impedancia equivalente de las fuentes usadas en las simulaciones puede no ser exacta, lo que para este algoritmo constituye una condición imprescindible en la determinación exacta del punto de fallo. 6. Para el caso de estudio, se considera el algoritmo de Schweitzer como el más preciso, dado que fue el que mejor desempeño mostró durante las simulaciones en general. 7. Por tanto, sería ventajoso un localizador implementado con este algoritmo de localización de fallo (Schweitzer) cuando entre en funcionamiento la Central Térmica da Biocom, considerando el hecho de que está bien avanzada la comunicación por fibra óptica, y el uso dos relés digitales en el sistema eléctrico, garantizando un intercambio de datos y comandos a distancia y una vez que ya existe experiencia en el uso de la tecnología SEL (Schweitzer Electric Laboratories), en Angola. IV. RECOMENDACIONES • Profundizar este estudio a través de un análisis análogo para corto circuitos monofásicos o bifásicos a tierra, y estudiar la posibilidad de aplicación de estos algoritmos de localización de fallos en el Sistema Eléctrico Angolano. • Un estudio de otras técnicas de localización de fallos, que no necesitan suposiciones sobre el comportamiento del sistema real y se mantenga el cálculo independiente de la impedancia de fallo..
(8) CIE2015. REFERENCIAS [1] M.C Meza, O.R.J.," et al”, Líneas de Transmisión y Distribución de Energía Eléctrica, Ciudad Universitaria, San Nicolás de Los Garza Nuevo León, Abril del 2006, páginas 3, 4, 30 - 37. [2] Ferreira, J.R., Sistemas Eléctricos de Energia I, Linhas de Transmissão, Versão de 2004, páginas 6, 16 -19, 29 - 33. [3] Haffiner, S., Modelagen e Análise de Sistemas en Regime Permanente, a Linha de Transmissão, Versão de 10 de Setenbro de 2007, p 3 -7. [4] Chiguano, D. I. D., Localización de fallas en líneas aéreas de transmisión. Aplicación de un algoritmo digital para líneas paralelas. Quito, Julio 2009. [5] Ospina, I., ´´et al´´. Algoritmos para Localización de Fallas en Líneas de Transmisión, Análisis para el caso Colombiano. Dyna, Universidad Nacional de Colombia. Medellín Colombia. Número 143.p 95100. Novienbre, 2004. [6] Zhang, Q., ´´et al´´. Fault Location of TwoParallel Transmission Line for Double Phase toGround fault using one-terminal Data, Tianjin China. ISSN 1009 – 3095 Journal of Zhejiang University SCIENCE. V.4, No 5, P 520-525, Sep – Oct 2003. [7] Kim, C., Fault location algoritms, June 2010. [8] Niazy, I., ´´et al´´. A New Single Ended Fault Location Algorithm for Combined Transmission Line Considering Fault Clearing Transients without. 8. Using Line Parameters, 25th International Power System Conference 2010, pagina. 6. [9] Dr Schweitzer III, E. O. Schweitzer Engineering Laboratories, INC. PULLMAN WASHINGTON. A Review of Impedance – Based Fault Locating Experience. 2009.. Emilio A Francesena Bacallao es graduado de Ingeniero Electricista en la Universidad Central de Las Villas (UCLV) en 1985.Titulado de Master en Ingeniería Eléctrica, mención Sistemas Eléctricos en 2001. Profesor Auxiliar del Centro de Estudios Electroenergéticos (CEE) en la Universidad Central de Las Villas. Se ha desempeñado como jefe disciplina y jefe de colectivos pedagógicos en la carrera. Nombrado Profesional de Alto Nivel de la UNAICC..Laboró desde su graduación y durante nueve años en el montaje, puesta en marcha y explotación de un Complejo Petroquímico, donde fue especialista técnico, jefe de departamento eléctrico y eléctrico principal. Cursó entrenamiento en sistema eléctrico industrial en la antigua URSS, impartió cursos de postgrado en Nicaragua y colabora como especialista en la República de Angola. Cursado varios cursos de postgrado y participa en la impartición de varios diplomados, cursos de postgrado y maestrías. Tutor de más de quince trabajos de diploma en las ramas de Protecciones Eléctricas y Sistema Eléctrico Industrial e Ingeniería Eléctrica como integradora, así como oponente y miembro del tribunal evaluador. Interviene directamente en varias tareas y proyectos en colaboración con la UNE, OBE e industrias de la región central de Cuba. Participación como ponente en más quince eventos internacionales, con varias publicaciones nacionales e internacionales..
(9)
Figure
Documento similar