Ferrol, 4-6 de septiembre de 2019
A Coru˜
na, 2019
Universidade da Coru˜na, Servizo de Publicaci´ons N◦ de p´aginas: 899
210x297mm ´Indice: pp.xiii-xxvi ISBN: 978-84-9749-716-9 Dep´osito Legal: C 761-2019
DOI:doi.org/10.17979/spudc.9788497497169 CDU: 681.5(063)
IBIC: TJFM|TJF
ORGANIZAN:
Comit´e Espa˜nol de Autom´atica
Universidade da Coru˜na, Escola Universitaria Polit´ecnica COLABORA:
Universidade da Coru˜na, Vicerreitor´ıa de Pol´ıtica Cient´ıfica, Investigaci´on e Transferencia EDITORES:
Jos´e Luis Calvo Rolle Jos´e Luis Casteleiro Roca Mar´ıa Isabel Fern´andez Ib´a˜nez
´
Oscar Fontenla Romero Esteban Jove P´erez Alberto Jos´e Leira Rejas Jos´e Antonio L´opez V´azquez Vanesa Loureiro V´azquez Mar´ıa Carmen Meizoso L´opez Francisco Javier P´erez Castelo Andr´es Jos´e Pi˜n´on Pazos H´ector Quinti´an Pardo Juan Manuel Rivas Rodr´ıguez Benigno Rodr´ıguez G´omez Rafael Alejandro Vega Vega DISE ˜NO DE CUBIERTA: Julia N´u˜nez Calo
c
de esta edici´on: Universidade da Coru˜na c
PREFACIO
Las Jornadas de Autom´atica constituyen, desde su primera edici´on en 1977, una cita ineludible en nuestro pa´ıs para quienes centramos nuestra actividad profesional en la Autom´atica, tanto desde el mundo cient´ıfico y acad´emico como de la empresa. Se trata de un punto de encuentro anual que nos permite debatir ideas, exponer resultados y proyectos relacionados con esta disciplina.
Este a˜no 2019 las Jornadas se celebran del 4 al 6 de septiembre en la Escuela Universitaria Polit´ecnica de Ferrol. Del programa cient´ıfico para estos tres d´ıas destacamos la organizaci´on de cuatro sesiones plenarias y dos mesas redondas, una sobre Industria 4.0 y otra sobre Aprendizaje M´aquina en Autom´atica. A estas actividades hay que a˜nadir las reuniones de los diferentes grupos tem´aticos, las presentaciones de empresas y las sesiones de p´osteres de las comunicaciones presentadas, entre otras.
Desde el Comit´e Organizador Local queremos agradecer a todos los participantes su ines-timable contribuci´on en este evento: a los asistentes, a los autores de los trabajos presentados, a los ponentes de las sesiones plenarias y las mesas redondas, al Comit´e Cient´ıfico y Comit´e Cient´ıfico Asesor, as´ı como a las empresas y organismos colaboradores. Tambi´en consideramos imprescindible dar las gracias al Comit´e Espa˜nol de Autom´atica, por confiar en la Universidade da Coru˜na como sede de esta 40a edici´on. Nos hemos esforzado en ofrecer un programa que aporte a las personas asistentes una experiencia enriquecedora a trav´es de nuevos conocimien-tos y lazos profesionales, as´ı como una oportunidad para disfrutar y descubrir Ferrol, nuestra ciudad, mediante las actividades sociales propuestas.
Las actas de las XL Jornadas de Autom´atica est´an formadas por un total de 114 comunica-ciones, organizadas en torno a los nueve Grupos Tem´aticos del Comit´e Espa˜nol de Autom´atica. Los trabajos seleccionados han sido sometidos a un proceso de revisi´on por pares, y, como novedad de esta edici´on, las actas se editan en formato electr´onico a trav´es del Servicio de Publicaciones de la Universidade da Coru˜na y se alojan para su consulta en acceso abierto en el RUC, el repositorio institucional de la UDC, bajo una licencia Creative Commons CC BY-NC-SA 4.0. Adem´as del ISBN y del DOI del volumen completo, a cada comunicaci´on aceptada se le ha asignado un DOI, con el fin de facilitar su localizaci´on en l´ınea y su citaci´on bibliogr´afica.
Comit´
e de Honor
Julio E. Abalde Alonso
Rector de la Universidade da Coru˜
na (UDC)
Araceli Torres Mi˜
no
Vicerrectora de Ferrol y Responsabilidad Social UDC
Gin´
es Nicol´
as Costa
Director del Campus Industrial UDC
Jos´
e M
aCardona Comellas
Gerente de Exponav
Comit´
e de Programa
Antonio Agudo
Universitat Polit`
ecnica de Catalunya
Rosa Mar´ıa Aguilar Chinea
Universidad de La Laguna
Mhd Wesam Al-Nabki
Universidad de Le´
on
Alejandro Alonso
Universidad Polit´
ecnica de Madrid
Luciano Alonso
Universidad de Cantabria
Ignacio Alvarez
Universidad de Oviedo
Manuel Arahal
Universidad Sevilla
Leopoldo Armesto
Universitat Polit`
ecnica de Val`
encia
Jos´
e Mar´ıa Azor´ın Poveda
Universitat Miguel Hern´
andez de Elche
Ramon Barber
Universidad Carlos III de Madrid
Antonio Javier Barrag´
an
Universidad de Huelva
Antonio Barrientos
Universidad Polit´
ecnica de Madrid
Manuel Berenguel
Universidad de Almer´ıa
Gerardo Beruvides
Hitachi Europe
Jose Luis Blanco Claraco
Universidad de Almeria
Xavier Blasco
Universitat Polit`
ecnica de Val`
encia
Carlos Bordons
Universidad de Sevilla
Pascal Brunet
Samsung Electronics
Gloria Bueno
Universidad de Castilla-La Mancha
Itziar Cabanes
Universidad del Pa´ıs Vasco
Antonio
Jos´
e
Calder´
on
Godoy
Universidad del Extremadura
Jos´
e Luis Calvo Rolle
Universidade da Coru˜
na
Fernando Casta˜
no Romero
Centro de Autom´
atica y Rob´
otica (UPM -CSIC)
Jos´
e Luis Casteleiro-Roca
Universidade da Coru˜
na
Mar´ıa Del Mar Castilla
Nie-to
Universidad de Sevilla
Sergio Cebollada
Universidad Miguel Hern´
andez
Deisy Chaves
Universidad de Le´
on
Smaranda Cristea
Universidad de Valladolid
Abel
Alberto
Cuadrado
Vega
Universidad de Oviedo
Arturo de la Escalera Hueso
Universidad Carlos III de Madrid
David Mu˜
noz de la Pe˜
na
Se-quedo
Universidad de Sevilla
Juan Antonio de La Puente
Universidad Polit´
ecnica de Madrid
Cesar De Prada
Universidad de Valladolid
Mar´ıa Dolores Del Castillo
CSIC
Ignacio Diaz-Blanco
Universidad de Oviedo
Jose-Luis Diez
Universitat Polit`
ecnica de Val`
encia
Manuel Dominguez
Universidad de Le´
on
Raquel Dormido
UNED
Oscar D´
eniz Su´
arez
Universidad de Castilla-La Mancha
Miguel D´ıaz-Cacho Medina
Universidad de Vigo
Elisabet Est´
evez Est´
evez
Universidad de Ja´
en
Jes´
us Fernandez Lozano
Universidad de M´
alaga
´
Alvaro Fern´
andez Garc´ıa
Universidad de Oviedo
Eduardo Fidalgo Fernandez
Universidad de Le´
on
Maria Fuente
Universidad de Valladolid
Daniel Galan
UNED
Anibal Galan Prado
Universidad de Valladolid
Santos Gal´
an
Universidad Polit´
ecnica de Madrid
Edwin Garcia
Universidad Polit´
ecnica Salesiana
Isabel Garc´ıa-Morales
Universidad de M´
alaga
Sergio Garc´ıa-Nieto
Universitat Polit`
ecnica de Val`
encia
Juan Diego Gil Vergel
Universidad de Almer´ıa
Antonio Gim´
enez Fern´
andez
Universidad de Almer´ıa
Vicente Gomez-Garay
UPV/EHU
Jose Luis Guzman
Universidad de Almer´ıa
Fernando G´
omez Bravo
Universidad de Huelva
Juan M. Herrero
Universitat Polit`
ecnica de Val`
encia
Alberto Herreros
Universidad de Valladolid
´
Angeles Hoyo
Universidad de Almer´ıa
Eloy Irigoyen Gordo
Universidad del Pa´ıs Vasco
Eduardo I´
a˜
nez
Universidad Miguel Hern´
andez de Elche
Esteban Jove
Universidade da Coru˜
na
Mikel Larrea
UPV/EHU
Juan-Ignacio Latorre-Biel
Universidad P´
ublica de Navarra
Daniel Limon Marruedo
Universidad de Sevilla
Vanesa Loureiro
Universidade da Coru˜
na
Jorge Luis Madrid
Centro de Autom´
atica y Rob´
otica (UPM-CSIC)
Luis Magdalena
Universidad Polit´
ecnica de Madrid
Anthony Mandow
Universidad de Malaga
Marga Marcos
Universidad del Pa´ıs Vasco
Graciliano Marichal
Universidad de La Laguna
Ra´
ul Mar´ın Prades
Universitat Jaume I
Rogelio Mazaeda
Universidad de valladolid
Miguel Angel Ma˜
nanas
Vi-llanueva
Universitat Polit`
ecnica de Catalunya
Francisco Ma˜
nas Alvarez
Universidad de Almer´ıa
Joaquim Melendez
Universitat de Girona
Alejandro Merino Gomez
Universidad de Burgos
Borja Millan
Universidad de Huelva
Jos´
e Moreno
Universidad de Almer´ıa
Jose Carlos Moreno Ubeda
Universidad de Almer´ıa
V´ıctor
Fernando
Mu˜
noz
Mart´ınez
Universidad de M´
alaga
Mar´ıa Paz Ochoa
Carnegie Mellon University
Manuel Gil Ortega Linares
Universidad de Sevilla
Mario Ortiz
Universidad Miguel Hern´
andez de Elche
Cristian Pablos
Universidad de Valladolid
Carlos G´
omez Palac´ın
Universidad de Valladolid
Andrzej Pawlowski
UNED
Luis Paya
Universidad Miguel Hernandez
Jos´
e Luis Pitarch
Universidad de Valladolid
Emilio P´
erez
Universitat Jaume I
Juan P´
erez Oria
Universidad de Cantabria
Joshue P´
erez Rastelli
Tecnalia
Javier P´
erez Turiel
Universidad de Valladolid
H´
ector Quinti´
an
Universidade da Coru˜
na
Rafael Raya
CSIC
Gilberto Reynoso-Meza
PUCPR
Luis Ricardez-Sandoval
University of Waterloo
Pablo Riquelme
Universidad de Valladolid
Antonio Robles Alvarez
Universidad de Oviedo
Eduardo Rocon
CSIC
Francisco Rodriguez
Universidad de Almer´ıa
Tania Rodr´ıguez
Compa˜
n´ıa Espa˜
nola de Alta Eficiencia Fotovoltaica,
BSQ Solar, SL
Francisco Rodr´ıguez-D´ıaz
Universidad de Almer´ıa
Vicente Rom´
an Erades
Univeridad Miguel Hern´
andez
Sara Roos Hoefgeest Toribio
Universidad de Oviedo
Claudio Rossi
Universidad Polit´
ecnica de Madrid
Francisco R. Rubio
Universidad de Sevilla
Ruben Ruiz
Universidad de Alicante
Gregorio Sainz-Palmero
Universidad de Valladolid
Antonio Sala
Universitat Polit`
ecnica de Val`
encia
Roberto Sanchis Llopis
Universitat Jaume I
Matilde Santos
Universidad Complutense de Madrid
J. Ignacio Serrano
Instituto de Automtica Industrial - CSIC
Jos´
e Sim´
o
Universitat Polit`
ecnica de Val`
encia
Jos´
e
Andr´
es
Somolinos
S´
anchez
Universida Polit´
ecnica de Madrid
Jorge
Antonio
S´
anchez-Molina
Universidad de Almer´ıa
Fernando Tadeo
Universidad de Valladolid
Maria Tomas Rodriguez
The City University of London
Jose Luis Torres
Universidad de Almer´ıa
Noelia Vallez
UCLM
Alberto Velasco Mata
UCLM
Alejandro Vignoni
Universidad Polit´
ecnica de Valencia
Carlos Vilas
IIM-CSIC
Jorge Villagra
Universidad Polit´
ecnica de Madrid
Luis J. Yebra
PSA-CIEMAT
Eduardo Zalama
Universidad de Valladolid
Jes´
us M. Zamarre˜
no
Universidad de Valladolid
Juan Zamorano
Universidad Polit´
ecnica de Madrid
Asier Zubizarreta
UPV/EHU
Jos´
e Domingo ´
Alvarez
Universidad de Almer´ıa
Carlos Balaguer Bernaldo de Quir´
os (UC3M)
CEA
Presidente
Guillermo Ojea Mer´ın (UniOvi)
CEA
Vicepresidente
Ram´
on Costa Castell´
o (UPC)
CEA
Secretario
Comit´
e Asesor
Antonio Barrientos Cruz (UPM)
Vocal
Hilario L´
opez Garc´ıa (UniOvi)
Vocal
Matilde Santos Pe˜
nas (UCM)
Vocal
Jos´
e Enrique Sim´
o Ten (UPV)
Vocal
Carlos Sagu´
es Bl´
azquiz (UniZar)
Vocal
Jos´
e Luis Calvo Rolle (UDC)
Vocal
Jos´
e And´
es Somolinos S´
anchez (UPM)
Automar
Jos´
e Mar´ıa Azor´ın Poveda (UMH)
Bioingenier´ıa
Elisabet Est´
evez Est´
evez (UJaen)
Computadores y Control
Eloy Irigoyen Gordo (UPV/EHU)
Control inteligente
Manuel Dom´ınguez Gonz´
alez (UniLeon)
Educaci´
on en Control
Jos´
e Luis Guzm´
an S´
anchez (UAL)
Ingenier´ıa de Control
Rosa Mar´ıa Aguilar Chinea (ULL)
Modelo, Simulaci´
on y Optimizaci´
on
Antonio Gim´
enez Fern´
andez (UAL)
Rob´
otica
Arturo de la Escalera Hueso (UC3M)
Visi´
on por Computador
Comit´
e Organizador Local
Jos´
e Luis Calvo Rolle
Jos´
e Luis Casteleiro Roca
Mar´ıa Isabel Fern´
andez Ib´
a˜
nez
´
Oscar Fontenla Romero
Esteban Jove P´
erez
Alberto Jos´
e Leira Rejas
Jos´
e Antonio L´
opez V´
azquez
Vanesa Loureiro V´
azquez
Mar´ıa Carmen Meizoso L´
opez
Francisco Javier P´
erez Castelo
Andr´
es Jos´
e Pi˜
n´
on Pazos
H´
ector Quinti´
an Pardo
Juan Manuel Rivas Rodr´ıguez
Benigno Rodr´ıguez G´
omez
Rafael Alejandro Vega Vega
ORGANIZADORES, PATROCINADORES Y COLABORADORES
Organizadores
Comit´
e Espa˜
nol de Autom´
atica
Universidade da Coru˜
na, Escuela Universitaria Polit´
ecnica
Patrocinadores
Alecop Group
ATI Sistemas
Beckhoff
Campus Industrial (UDC)
Colegio Oficial de Grados, Peritos e Ingenieros T´
ecnicos Navales
Consello Galego de Enxe˜
neiros T´
ecnicos Industriais
Deputaci´
on da Coru˜
na
Fundaci´
on CEA
Gabadi
Ilustre Colegio Oficial de Ingenieros Industriales de Galicia
Mathworks
MeasureIT
Navantia
Prodel
Reganosa
Septentrio Technologies
Sidiab
SMC International Training
T´
ecnicas de Soft
Vicerreitor´ıa de Pol´ıtica Cient´ıfica, Investigaci´
on e Transferencia (UDC)
Colaboradores
Autoridad Portuaria de Ferrol-San Cibrao
Colexio Oficial de Enxe˜
neiros T´
ecnicos Industriais de A Coru˜
na
Concello de Ferrol
Infanter´ıa de Marina (Tercio Norte)
Museo de la Construcci´
on Naval Exponav
Sociedade Mixta de Turismo de Ferrol
Idom
Ikerlan
Infaimon
ISA Secci´
on Espa˜
nola
Kongsberg
Mathworks
Prodel
Schneider
Siemens
Springer
Werium
´
INDICE DE CONTENIDOS
Automar
OPTIMIZACI ´
ON HEUR´ISTICA CON CRITERIOS DE ERROR DE
CONTROL TMD EN TURBINAS MARINAS FLOTANTES . . . .
1
Juan Almenara Ahij´
on, Matilde Santos and Mar´ıa Tom´
as-Rodr´ıguez
AN ´
ALISIS Y PLANIFICACI ´
ON DE MISIONES DE B ´
USQUEDA Y
RESCATE EN EL ENTORNO MAR´ITIMO . . . .
8
Eva Besada-Portas, Jos´
e L. Risco-Mart´ın, Jos´
e A. L´
opez-Orozco and
Juan J. Navarro-Corcuera
REDUCCI ´
ON DE LA CARGA DE TRABAJO DEL OPERADOR EN UN
CENTRO DE CONTROL ADAPTATIVO MULTI-VEH´ICULO. . . 16
Juan Antonio Bonache-Seco, Jos´
e Antonio L´
opez-Orozco, Eva
Besada-Portas, Juan Francisco Jim´
enez-Castellanos and Jos´
e Mar´ıa
Gir´
on-Sierra
MODELIZACI ´
ON, SIMULACI ´
ON Y EVALUACION
TECNICO-ECONOMICA DE UNA TURBINA DE MAR . . . 24
Daniel Lillo, Matilde Santos, Segundo Esteban, Rafael L´
opez and Mar´ıa
Guijarro
EXPERIENCIAS EN EL DISE ˜
NO DE ROBOTS EDUCACIONALES
SUBMARINOS . . . 32
Antonio Pe˜
nalver, Josep Mar´ın, Javier Ponce, Ra´
ul Mar´ın, Jos´
e Vicente
Mart´ı, Gustavo Casa˜
n and Pedro Sanz
MODELO DIN ´
AMICO Y CONTROL NO LINEAL PARA UN
CONVERTIDOR DE ENERG´IA DE LAS CORRIENTES MARINAS DE
PRIMERA GENERACI ´
ON Y DOS GRADOS DE LIBERTAD . . . 42
Eva Segura, Rafael Morales and Jose A Somolinos
Bioingenier´ıa
DEEP LEARNING FOR THE AUTOMATIC CLASSIFICATION OF
TISSUE TYPES IN BREAST BIOPSIES . . . 48
Javier C´
ordoba Romero, Maria Gloria Bueno Garc´ıa and Oscar Deniz
Suarez
INESPERADOS DURANTE LA MARCHA NORMAL A TRAV ´
ES DE
SE ˜
NALES EEG . . . 55
Mar´ıa Elvira, Eduardo I´
a˜
nez, Vicente Quiles, Mario Ortiz and Jose M.
Azor´ın
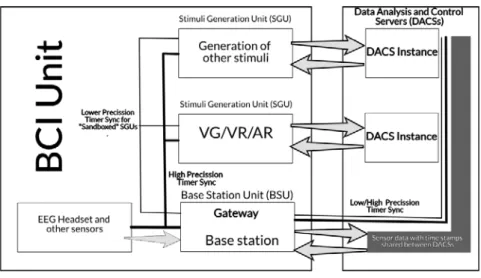
ARQUITECTURA PARA LA INTEGRACI ´
ON DE MOTORES DE
VIDEOJUEGOS EN APLICACIONES BASADAS EN INTERFACES
CEREBRO-COMPUTADOR . . . 63
Jose Estevez, Jonay Toledo and Leopoldo Acosta
APLICACI ´
ON DE T´
ECNICAS DE AGRUPAMIENTO A CORREDORES
DE RESISTENCIA PARA LA ESTIMACI ´
ON DEL UMBRAL DE
LACTATO . . . 71
Urtats Etxegarai, Eva Portillo P´
erez, Jon Irazusta, Itziar Cabanes and
Asier Zubizarreta
EXOESQUELETO DE BAJO COSTE CONTROLADO POR SE ˜
NALES
EMG Y EEG ORIENTADO A TERAPIAS DE REHABILITACI ´
ON DE
MANO . . . 79
´
Oscar Fern´
andez-Ballesteros, Javier Belmar, Jose M. Azor´ın and
Eduardo I´
a˜
nez
DESARROLLO DE APLICACIONES MULTITAREA PARA EL
ESTUDIO DE LA MEJORA DEL RENDIMIENTO COGNITIVO EN
PACIENTES CON ENFERMEDADES NEURODEGENERATIVAS . . . 87
Eduardo Garbayo Herce and Montserrat Gil-Mart´ınez
SISTEMA DE VISI ´
ON PARA EL GUIADO DE UN ASISTENTE
ROB ´
OTICO EN OPERACIONES DE CIRUG´IA ENDONASAL . . . 94
Ander Loidi Yarza, Rafael Estop Remacha, Eusebio de la Fuente L´
opez,
Juan Carlos Fraile Marinero and Javier P´
erez Turiel
ALGORITMO PARA LA ESTIMACI ´
ON DEL ´
ANGULO
ANTEROPOSTERIOR DE UNA MULETA SENSORIZADA . . . 101
I˜
nigo Sesar-Gil, Asier Zubizarreta and Itziar Cabanes
EVALUACI ´
ON DE UN ESQUEMA DE CONTROL MIOEL´
ECTRICO
BIDIMENSIONAL PARA PR ´
OTESIS ROB ´
OTICAS . . . 107
´
Angela S´
anchez P´
erez, Jos´
e Miguel Torres, Carlos A. Jara, Jorge
Pomares, Gabriel J. Garc´ıa and Andr´
es ´
Ubeda
OBTENCI ´
ON NO INVASIVA DE LA ONDA DE PRESI ´
ON ARTERIAL
EN LA CAR ´
OTIDA . . . 113
David Zambrana, Vicente Esteve, Jose Maria Vicente and Jose Maria
Sabater-Navarro
Computadores y Control
EL SEGMENTO DE TIERRA DEL SAT´
ELITE UPMSAT-2 . . . 119
Alejandro Alonso, Ra´
ul Torres, Juan Zamorano, Jorge Garrido and Juan
Antonio de la Puente
PLANIFICACI ´
ON DESCENTRALIZADA BASADA EN SISTEMAS
MULTIAGENTE PARA ORQUESTADORES EN LA NIEBLA . . . 126
Oskar Casquero, Aintzane Armentia, Isabel Sarachaga, Dar´ıo Orive and
Marga Marcos
HACIA UNA PLATAFORMA GEN´
ERICA DE GESTI ´
ON DE
APLICACIONES DIN ´
AMICAMENTE RECONFIGURABLES . . . 133
Unai Gangoiti, Aintzane Armentia, Elisabet Est´
evez, Oskar Casquero
and Marga Marcos
USING THE OPEN SOURCE LIBRARY LIBNODAVE FOR
MONITORING TASKS IN THE SMART GRID SCENARIO . . . 141
Isa´ıas Gonz´
alez, Antonio Jos´
e Calder´
on, Jos´
e Mar´ıa Portalo and Manuel
Calder´
on
HACIA LA PUESTA EN MARCHA VIRTUAL DE C ´
ELULAS
ROBOTIZADAS BASADA EN GEMELO DIGITAL. . . .147
Dar´ıo Orive, Nagore Iriondo, Marga Marcos and Oskar Casquero
INTEGRACI ´
ON END-TO-END A TRAV´
ES DEL MODELO DEL
PRODUCTO 4.0 . . . 155
Isabel Sarachaga, Arantza Burgos, Nagore Iriondo, Maria Luz Alvarez
and Marga Marcos
Control Inteligente
IDENTIFICACI ´
ON DE CARRETERAS CONVENCIONALES
MEDIANTE T´
ECNICAS DE SOFT COMPUTING . . . 162
Felipe Barreno Herrera, Matilde Santos and Manuel Romana Garc´ıa
PARA ENTRENAR REDES NEURONALES DE CONVOLUCI ´
ON . . . 170
Luis Benages-Pardo, Rub´
en Sag¨
u´
es-Tanco, Gonzalo L´
opez-Nicol´
as and
Sergio Llorente
CENTRALIZED AND DISTRIBUTED MODEL-BASED PREDICTIVE
CONTROL APPLIED TO A SEWER NETWORK . . . 178
Antonio Cembell´ın, Mario Francisco and Pastora Isabel Vega
AN ´
ALISIS DE VIBRACIONES EN UNA ESTRUCTURA UTILIZANDO
ECHO STATE NETWORKS . . . 186
Ignacio D´ıaz Blanco, Diego Garc´ıa P´
erez, Ana Gonz´
alez Mu˜
niz and Abel
Alberto Cuadrado Vega
DETECTION SYSTEM OF FAILURE ALARMS IN THE
MECHANICAL TRAIN OF A WIND TURBINE . . . 192
David Lopez, Luis Pantoja and Eloy Irigoyen
SISTEMA H´IBRIDO PARA LA PREDICCI ´
ON DEL
FUNCIONAMIENTO DE UNA CELDA DE COMBUSTIBLE BASADA
EN HIDR ´
OGENO, EMPLEADA EN EL ALMACENAMIENTO DE
ENERG´IA . . . 200
Juan Aurelio Montero-Sousa, Esteban Jove, Jos´
e-Luis Casteleiro-Roca,
H´
ector Quinti´
an, Jos´
e Luis Calvo-Rolle, H´
ector Al´
aiz-Moret´
on and
Tom´
as Gonz´
alez-Ayuso
COMPARACI ´
ON DE ALGORITMOS DE APRENDIZAJE
AUTOM ´
ATICO PARA LA CLASIFICACI ´
ON DE POSTURAS DE LA
MANO Y DEDOS . . . 211
Enaitz Otazua, Eloy Irigoyen, Eukene Imatz-Ojanguren and Thierry Keller
EVALUACION DE UN ALGORITMO DE TORQUE VECTORING CON
CAPACIDAD DE FRENADO REGENERATIVO . . . 218
Alberto Parra, Asier Zubizarreta and Joshu´
e P´
erez
DISE ˜
NO E IMPLEMENTACI ´
ON DE UN SISTEMA DE DETECCI ´
ON
DE OBST ´
ACULOS PARA ROBOTS AUT ´
ONOMOS BASADO EN
L ´
OGICA BORROSA . . . 226
Daniel Vicente Rodrigo Mu˜
noz and Matilde Santos
MONITORIZACI ´
ON DEL ESTADO DE RODAMIENTOS BASADA EN
T´
ECNICAS DE APRENDIZAJE AUTOM ´
ATICO . . . 234
Alberto Villalonga, Fernando Casta˜
no, Gerardo Beruvides, Rodolfo Haber
and Fernando Matia
Educaci´
on en Autom´
atica
DESPLIEGUE AUTOM ´
ATICO DE LABORATORIOS REMOTOS
EXTENDIENDO LAS CAPACIDADES DE DE EJSS . . . 242
I˜
nigo Aizpuru-Rueda, Eva Besada-Portas, Jes´
us Chac´
on and Jos´
e
Antonio L´
opez-Orozco
RENEWABLE ENERGY SYSTEMS AND SMART GRIDS: PLATFORM
TO DEVELOP FINAL YEAR PROJECTS ON AUTOMATION AND
SUPERVISION . . . 250
Antonio Jos´
e Calder´
on, Isa´ıas Gonz´
alez and Manuel Calder´
on
EDUCACI ´
ON EN SOSTENIBILIDAD Y PROMOCI ´
ON DE
VOCACIONES CIENT´IFICO-T´
ECNICAS EN ESTUDIANTES
PREUNIVERSITARIOS A TRAV ´
ES DE LA CONSTRUCCI ´
ON DE UN
VEH´ICULO SOLAR . . . 257
Yolanda Ceada-Garrido, Antonio Javier Barrag´
an, Juan Manuel
Enrique, Ram´
on Tirado-Morueta and Jos´
e Manuel And´
ujar
MEJORA DE SISTEMA DE CONTROL COORDINADO DE ROBOTS
M ´
OVILES MEDIANTE LA UTILIZACI ´
ON DE UN SISTEMA DE
LOCALIZACI ´
ON POR VISI ´
ON . . . 263
David Gallarta, Pablo ´
Alvarez, Javier Rico-Azagra and Montserrat
Gil-Mart´ınez
LABORATORIO DE MANUTENCI ´
ON E INFORM ´
ATICA
INDUSTRIAL RICARDO MAR´IN DE LA UNIVERSIDAD DE VIGO: 25
A ˜
NOS DE AUTOMATIZACI ´
ON INDUSTRIAL . . . 270
Julio Garrido Campos, Juan S´
aez L´
opez, Jos´
e Ignacio Armesto Quiroga,
Angel Manuel Espada Seoane and David Santos Ester´
an
REMOTE RESEARCH LABORATORY DEVELOPMENT BY USING
MULTICONNECTED INDUSTRIAL TECHNOLOGIES . . . 277
Amaro Gonz´
alez Garc´ıa, Manuel Dom´ınguez Gonz´
alez and Ignacio Diaz
Blanco
DUINO-BASED LEARNING (DBL) : UN PROYECTO PARA
FACILITAR EL USO DE ARDUINO Y MATLAB . . . 288
Eneko Lerma, Robert Gri˜
n´
o, Ramon Costa Castell´
o and Carlos Sanchis
LAS VENTAJAS DEL IoT EN EL DISE ˜
NO DE LABORATORIOS
REMOTOS: myGATEWAY . . . 294
Marco A. Marquez Sanchez, Reyes Herrera, Andres Mejias Borrero and
Jos´
e Manuel And´
ujar
BEAGLEBONE . . . 302
Alejandro Millan Del Rio, Jose Alberto Benitez Andrades, Carmen
Benavides Cuellar, Bruno Fernandes, Fabio Silva, Jose Luis Casteleiro
Roca, Isaias Garcia Rodriguez and Hector Alaiz Moreton
RECONSTRUCCI ´
ON DEL SISTEMA DE CONTROL DE UN EQUIPO
DE LABORATORIO CLASIFICADOR DE PIEZAS POR PESO . . . 309
Eduardo Moya, Alfonso Poncela, Javier Garc´ıa and Mario Bl´
azquez
PLATAFORMA GIROSC ´
OPICA REALIZADA MEDIANTE
IMPRESI ´
ON 3D PARA EL CONTROL DE ACTITUD Y
ORIENTACI ´
ON DE UAVS MULTI-ROTOR . . . 317
Silvano N´
ajera, Javier Rico-Azagra, Carlos Elvira and Montserrat
Gil-Mart´ınez
EXPERIENCIA DE APRENDIZAJE BASADO EN PROYECTOS CON
EVALUACI ´
ON COMPETITIVA-COLABORATIVA PARA
REGULACI ´
ON AUTOM ´
ATICA . . . 324
Luis Orihuela
EQUIPO DE PR ´
ACTICAS PORT ´
ATIL PARA APRENDIZAJE SOBRE
MANEJO Y PROGRAMACI ´
ON DE AUT ´
OMATAS PROGRAMABLES . . . 331
Alfonso Poncela Mendez and Jesus Aguado Laguna
CONTROL ACTIVO DE VIBRACIONES EN ESTRUCTURAS CIVILES
ESBELTAS . . . 339
Alfonso V. Poncela M´
endez, Eduardo J. Moya de La Torre, F. Javier
Garc´ıa Ru´ız and Alberto de Domingo de La Rubia
USO DEL EST ´
ANDAR LTI PARA INTEGRAR SISTEMAS DE
GESTI ´
ON DE APRENDIZAJE Y LABORATORIOS ONLINE . . . 347
Ildefonso Ruano, Elisabet Est´
evez, Juan G´
omez and Javier G´
amez
DESAROLLO DE LABORATORIOS H´IBRIDOS DE SISTEMAS
INDUSTRIALES PARA EL APRENDIZAJE INTERACTIVO DE
AUTOMATIZACI ´
ON Y CONTROL . . . 354
Alberto Torres, Carlos A. Jara, Jorge Pomares, Gabriel J. Garc´ıa, Jos´
e
L. Ram´
on, Andr´
es ´
Ubeda and Carolina S. D´ıaz
EJEMPLO DE INTEGRACI ´
ON DE ALEXA CON UN ROBOT UR . . . 360
Jose Maria Vicente-Samper, Irene Campos, Benjamin Sanz Worrell,
Adrian Rodriguez, Juna Miguel Onate Tevar and Jose Maria
Sabater-Navarro
Ingenier´ıa de Control
SISTEMA DE CONTROL BASADO EN ARDUINO PARA UNA
CALDERA DE BIOMASA . . . 366
Mart´ın Balboa, Serafin Alonso, Juan Jose Fuertes, Antonio Moran and
Miguel Angel Prada
GESTI ´
ON ENERG´
ETICA DE UN CICLO DE REFRIGERACI ´
ON CON
ALMACENAMIENTO DE ENERG´IA . . . 374
Guillermo Bejarano, Jo˜
ao M. Lemos, Manuel G. Ortega and Francisco
R. Rubio
OBSERVADOR DE ALTA GANANCIA CON ZONA MUERTA PARA
PILAS DE COMBUSTIBLE PEM . . . 382
Andreu Cecilia and Ramon Costa Castell´
o
NUEVAS TECNOLOG´IAS EN MANIPULADORES INGR ´
AVIDOS:
MANIPULADOR INGR ´
AVIDO 4.0 (MINIon 4.0) . . . 389
Antonio Corral and Eduardo Moya
CONTROL ROBUSTO QFT DE UN SISTEMA DE REFRIGERACI ´
ON . . . 397
Roc´ıo Del Campo Pedrosa, Montserrat Gil-Mart´ınez and Javier
Rico-Azagra
DISE ˜
NO DE UNA MAQUETA DE BAJO COSTE PARA SHM . . . 405
Diego Garc´ıa P´
erez, Ignacio D´ıaz Blanco, Ana Gonz´
alez Mu˜
niz and Abel
Alberto Cuadrado Vega
CONTROL PREDICTIVO LINEAL DEL PH EN UN
FOTOBIORREACTOR RACEWAY . . . 414
´
Angeles Hoyo, Jos´
e Luis Guzm´
an, Jos´
e Carlos Moreno and Manuel
Berenguel
CONTROL DE UN RECUPERADOR DE SALES EN UNA PLANTA
TERMOSOLAR H´IBRIDA . . . 421
Pablo Ot´
alora, Jose Luis Guzman, Lidia Roca and Javier Bonilla
COMPARATIVA DE ENTORNOS OPEN-SOURCE PARA SISTEMAS
DE SUPERVISI ´
ON APLICABLES A SMART GRIDS/SMART
MICRO-GRIDS . . . 428
Jos´
e Mar´ıa Portalo Calero, Isa´ıas Gonz´
alez, Antonio Jos´
e Calder´
on and
Manuel Calder´
on
CONFIANZA . . . 435
´
Alvaro Rodr´ıguez Del Nozal, Luis Orihuela and Pablo Millan
UNA REGLA DE SINTON´IA NO EST ´
ANDAR PARA
CONTROLADORES PI POR EVENTOS . . . 442
Jos´
e S´
anchez Moreno, Mar´ıa Guinaldo Losada and Sebasti´
an Dormido
Bencomo
BANCO DE ENSAYO PARA MOTORES DE VEH´ICULOS EL´
ECTRICOS 450
Jose Luis Torres-Moreno, Galo Heredia, Antonio Gimenez-Fernandez
and Antonio Visioli
Modelado, Simulaci´
on y Optimizaci´
on
CREACI ´
ON DE CASOS DE ESTUDIO PARA LA GESTI ´
ON
ENERG´
ETICA DE SISTEMAS HVAC EN EDIFICIOS BASADOS EN
TRNSYS . . . 458
Adrian Cardona Ruiz, Daniel Limon Marruedo, Juan Francisco Coronel
Toro and Luis Perez-Lombard
MODELOS EMP´IRICOS DEL CAMPO SOLAR EN PLANTAS
TERMOSOLARES DE CONCENTRACI ´
ON. APLICACI ´
ON A LA
PLANIFICACI ´
ON . . . 466
Emilian Gelu Cojocaru, Jos´
e Manuel Bravo Caro, Manuel Vasallo and
Manuel Emilio Gegundez-Arias
MODELO DE SISTEMA DE REFRIGERACI ´
ON DE EDIFICIOS
ORIENTADO AL CONTROL Y GESTI ´
ON DE LA EFICIENCIA
ENERG´
ETICA . . . 475
Joaquin Garcia Ordonez, Juan Moreno Nadales, Daniel Limon
Marruedo, Luis Perez-Lombard Martin de Oliva, Juan Francisco Coronel
Toro and Adrian Cardona Ruiz
AJUSTE DE UN MODELO DE REDES DE CONTAGIO DE VARICELA
MEDIANTE ALGORITMOS DE OPTIMIZACI ´
ON HEUR´ISTICOS EN
UN ENTORNO DE C ´
ALCULO DISTRIBUIDO . . . 483
Jos´
e Gabriel Garc´ıa Caro and Matilde Santos
MODELLING A SOLAR TRACKER WITH HIGH CONCENTRATION
PANELS . . . 491
Manuel Garrido Satue, Fernando Casta˜
no Casta˜
no, Manuel Gil Ortega
Linares and Francisco Rodriguez Rubio
DISE ˜
NO DE UN GEMELO DIGITAL PARA EL GESTOR DE
OPERACIONES DE UNA LAVANDER´IA INDUSTRIAL . . . 499
Germ´
an Gonz´
alez Rodr´ıguez, Jos´
e Manuel Gonz´
alez Cava, Esteban Jove,
Jos´
e Luis Calvo Rolle and Juan Albino M´
endez P´
erez
INTERFAZ PARA UN OPTIMIZADOR QUE GESTIONA LA
PRODUCCI ´
ON DE ELECTRICIDAD EN UNA F ´
ABRICA AZUCARERA . 506
Sergio Hern´
andez, Cristian Pablos and Felipe Acebes
REAL-TIME OPTIMISATION FOR A HEAT-RECOVERY SECTION
WITH EQUIPMENT DEGRADATION . . . 513
Maria P. Marcos, Jos´
e Luis Pitarch and Cesar De Prada
FRAMEWORK FOR MOTION PREDICTION OF VEHICLES IN A
SIMULATION ENVIRONMENT . . . 520
Juan Felipe Medina Lee, Vinicius Trentin and Jorge Villagra
ESTUDIO DEL MODELO DE COMBATE DE LANCHESTER COMO
SOPORTE PARA LA CONSTRUCCI ´
ON DE UN DECISOR
ESTRAT´
EGICO OPERACIONAL MILITAR MEDIANTE BLOQUES
RETROALIMENTADOS . . . 528
Gerardo Minguela Castro, Carlos Cerrada and Jose Antonio Cerrada
DETECCI ´
ON Y SUPRESI ´
ON DE ARM ´
ONICOS DE BAJO ORDEN EN
LA CORRIENTE EL´
ECTRICA . . . 535
Pablo Montero and Francisco Gordillo
DISE ˜
NO EN SOLIDWORKS DE PLATAFORMA DEL SISTEMA
CARDIOVASCULAR PARA ENSAYO DE ROBOTS DE NAVEGACI ´
ON
AUT ´
ONOMA . . . 544
Cristina Nuevo-Gallardo, Jos´
e Emilio Traver, Ines Tejado, Javier
Prieto-Arranz, Miguel A. L´
opez and Blas M Vinagre
MEJORAS DEL SIMULADOR DE DISPERSI ´
ON DE GASES GADEN
PARA DESARROLLOS DE ROB ´
OTICA OLFATIVA . . . 552
Pepe Ojeda, Javier Monroy and Javier Gonz´
alez-Jim´
enez
SCHEDULING ´
OPTIMO DE PROCESOS BATCH DE DURACI ´
ON
INTERDEPENDIENTE . . . 560
Carlos G´
omez Palac´ın, Pablo Riquelme and Cesar De Prada
PERTENECIENTES A REDES DE SUMINISTRO DE AGUA
MEDIANTE FILTROS EST ´
ATICOS LINEALES BASADOS EN PCA . . . 568
Mario Pereira Martin, Joaquim Blesa, Vicen¸
c Puig and David Mu˜
noz De
la Pe˜
na Sequedo
MODELADO Y OPTIMIZACI ´
ON DE MISIONES DE B ´
USQUEDA
MEDIANTE UAVs . . . 574
Sara P´
erez-Carabaza, Eva Besada-Portas, Jos´
e Antonio L´
opez-Orozco
and Gemma Blasco
MODELO DE TEMPERATURA PARA REACTORES ABIERTOS DE
MICROALGAS . . . 582
Enrique Rodr´ıguez Miranda, Francisco Gabriel Aci´
en Fern´
andez, Jos´
e
Luis Guzm´
an S´
anchez, Manuel Berenguel Soria and Antonio Visioli
COMPARACI ´
ON DE ESTRATEGIAS DE CONTROL PARA SISTEMAS
MPPT: OPTIMIZACI ´
ON DE LA POTENCIA ENTREGADA A LA
CARGA VS OPTIMIZACI ´
ON DE LA POTENCIA EXTRA´IDA DEL
GENERADOR FOTOVOLTAICO . . . 589
Juan R´ıos Guti´
errez, Juan Manuel Enrique G´
omez, Antonio Javier
Barragan Pi˜
na and Jos´
e Manuel And´
ujar
LOW LEVEL CONTROL ACTUATED SYSTEM MODELLING
APPROACH FOR HIGHLY AUTOMATED VEHICLES . . . 596
Joseba Sarabia, Jose Angel Matute-Peaspan and Asier Zubizarreta
DESIGN AND DEVELOPMENT OF A LOW COST AUTOMATIC
STRINGED INSTRUMENT TUNER . . . 604
Javier Sevilla Salcedo, Diego Manuel Mart´ınez Gila, Ildefonso Ruano
Ruano, Alejandro S´
anchez Garc´ıa, El´ısabet Est´
evez Est´
evez, Juan G´
omez
Ortega and Javier G´
amez Garc´ıa
INFLUENCIA DE LA LATENCIA EN EL CONTROL DE AGVS A
TRAV´
ES DE REDES 5G . . . 611
Jesus Enrique Sierra Garcia and Matilde Santos Pe˜
nas
MODELADO Y VERIFICACI ´
ON MEDIANTE L ´
OGICA LINEAL
TEMPORAL DE UN GRUPO DE DOS ASCENSORES CON SISTEMA
DE CONTROL DE DESTINO . . . 617
Manuel Toscano-Moreno, Alberto Arregui, Anthony Mandow and Alfonso
Garc´ıa-Cerezo
AN OPERATIONAL MODEL FOR THE OPTIMAL OPERATION OF
THE FREEZE-DRYING PROCESS . . . 623
Carlos Vilas, Antonio Alonso, Eva Balsa-Canto, Estefan´ıa
L´
opez-Quiroga and Cristian Trelea
AN ´
ALISIS DE OBSERVABILIDAD E IDENTIFICABILIDAD
ESTRUCTURAL DE MODELOS NO LINEALES: APLICACI ´
ON A LA
V´IA DE SE ˜
NALIZACI ´
ON JAK/STAT . . . 631
Alejandro F. Villaverde and Julio Banga
RED NEURONAL ESTRUCTURADA EN EL ESPACIO DE ESTADOS
COMO MODELO DE CAJA GRIS . . . 639
Jes´
us M. Zamarre˜
no and Alejandro Merino
Rob´
otica
DISE ˜
NO Y DESARROLLO DE UN ROBOT A´
EREO PARA LA
INSPECCI ´
ON DE COLECTORES DE SANEAMIENTO . . . 647
Jose Luis Andrade Pineda, Honorio Romero Rodriguez, Angel Rodriguez
Casta˜
no, Francisco Javier P´
erez Grau, Graciano Carpes Hortal and
Anibal Ollero Baturone
CONTROL DE FORMACIONES SOBRE REGIONES OBJETIVO DE
SISTEMAS MULTI-AGENTE LAGRANGIANOS CON RETARDO . . . 655
Ernesto Aranda-Escol´
astico, Maria Guinaldo, Leonardo J. Colombo and
Sebasti´
an Dormido
COLECCI ´
ON DE JUPYTER NOTEBOOKS PARA CURSOS DE
ROB ´
OTICA M ´
OVIL . . . 663
Samuel-Felipe Baltanas-Molero, Jose-Raul Ruiz-Sarmiento and Javier
Gonzalez-Jimenez
DESIGN OF A NOVEL VARIABLE-STIFFNESS GRIPPER USING
JAMMING FINGERS . . . 671
Daniel Cardin-Catalan, Angel P. Del Pobil and Antonio Morales
EXPERIENCIAS EDUCATIVAS BASADAS EN EL SISTEMA
MARPABIOBOT . . . 679
Gustavo Casa˜
n, Jose Vicente Mart´ı, Raul Mar´ın, David Forn´
as and
Pedro Sanz
MAPPING EN ROB ´
OTICA M ´
OVIL . . . 686
Sergio Cebollada, Vicente Rom´
an, Luis Pay´
a, Mar´ıa Flores, Luis Miguel
Jim´
enez and Oscar Reinoso
TELEOPERATING A MOBILE MANIPULATOR USING A UAV
CAMERA WITHOUT ROBOT SELF-OCCLUSIONS . . . 694
Josep-Arnau Claret and Luis Basa˜
nez
ALGORITMO DE GENERACI ´
ON DE TRAYECTORIAS EN EL
INTERIOR DE CHAPAS PARA LA SUBSANACI ´
ON DE DEFECTOS . . . . 702
´
Alvaro Fern´
andez Garc´ıa, Sara Roos Hoefgeest Toribio, Ignacio ´
Alvarez
Garc´ıa and Rafael Corsino Gonz´
alez de Los Reyes
EVALUACION MULTI-ZMP PARA TAREAS DE TRANSPORTE DE
OBJETOS EN ROBOTS HUMANOIDES . . . 710
Juan Miguel Garcia-Haro, Santiago Martinez, Juan Hernandez Vicen
and Carlos Balaguer
DESARROLLO DE UNA VERSI ´
ON DE BAJO COSTE DEL ROBOT
SOCIAL MINI. . . .718
Carlos Manuel Gomez Jimenez, Carlos Juan De Dios Ursua, Jose Carlos
Castillo Montoya, Alvaro Castro Gonzalez, Fernando Alonso Martin,
Maria Malfaz Vazquez, Marcos Maroto Gomez and Miguel Angel Salichs
Sanchez-Caballero
OBTENCION DEL MODELO CINEMATICO INVERSO DE SISTEMAS
ROBOTIZADOS DE CADENA CINEMATICA ABIERTA EMPLEANDO
BASES DE GROEBNER. APLICACION A UN ROBOT HEXAPODO . . . 726
Jose Guzman-Gimenez, ´
Angel Valera, Vicente Mata and Miguel ´
Angel
D´ıaz-Rodr´ıguez
UNA RED DE SENSORES INAL ´
AMBRICA BASADA EN HARDWARE
Y SOFTWARE ABIERTO PARA COLABORACI ´
ON CON
APLICACIONES DE ROB ´
OTICA A MISIONES DE B ´
USQUEDA Y
RESCATE . . . 735
Francisco Jos´
e Lara Hurtado, Jesus Fernandez-Lozano and Ricardo
V´
azquez Mart´ın
M´
ETODO DE PLANIFICACI ´
ON DE TRAYECTORIAS M ´
ULTIPLES
PARA ENJAMBRE DE UAVS.. . . .741
´
Angel Madridano, Abdulla Al-Kaff, David Martin, Arturo de la Escalera
and Jose Mar´ıa Armingol
HERRAMIENTA PARA VISUALIZACI ´
ON GR ´
AFICA DE FUERZAS DE
CONTACTO Y DE MOVIMIENTOS DE UNA MANO ROB ´
OTICA CON
SENSORES T ´
ACTILES . . . 749
Andr´
es Monta˜
no and Ra´
ul Su´
arez
HACIA UNA ESTRATEGIA ASISTIDA POR ROBOT PARA LA
RECUPERACION DE FUNCION MOTORA DE EXTREMIDAD
SUPERIOR CON ASPECTOS COGNITIVOS . . . 756
Edwin Daniel O˜
na, Bartek Lukawski, Alberto Jard´
on and Carlos Balaguer
PLANIFICACI ´
ON DE TRAYECTORIAS DE UN ROBOT M ´
OVIL
MODULAR CON UN ´
UNICO ACTUADOR. . . .764
Adri´
an Peidr´
o Vidal, Julio Gallego, Luis Paya, Jos´
e Mar´ıa Mar´ın and
Oscar Reinoso
DETECCI ´
ON DE PALLETS MEDIANTE T´
ECNICAS DE VISI ´
ON POR
COMPUTADOR . . . 772
David Ramos and Jesus Enrique Sierra Garcia
CONTROL DIN ´
AMICO DE MANIPULADORES M ´
OVILES CON
REALIMENTACI ´
ON VISUAL . . . 779
Jose L. Ram´
on, ´
Alvaro Belmonte, Jorge Pomares, Gabriel J. Garc´ıa,
Carlos A. Jara, Andr´
es ´
Ubeda, Ester Abad and Mar´ıa ´
Angeles Rueda
INTEGRACI ´
ON DE UN PLANIFICADOR DE TRAYECTORIAS
PARAMETRIZADO EN LA ARQUITECTURA ROB ´
OTICA ROS . . . 787
Mario A. Rueda-Castro, Javier Monroy, Francisco-Angel Moreno and
Javier Gonzalez-Jimenez
DISE ˜
NO DE UNA PINZA SUBACTUADA H´IBRIDA SOFT-RIGID CON
SENSORES H ´
APTICOS PARA INTERACCI ´
ON F´ISICA
ROBOT-HUMANO . . . 795
Trinidad S´
anchez-Montoya, Juan M. Gandarias, Francisco Pastor,
Antonio J. Mu˜
noz-Ram´ırez, Alfonso J. Garc´ıa-Cerezo and Jes´
us M.
G´
omez-de-Gabriel
GENERACI ´
ON EFICIENTE DE MOSAICOS PARA INSPECCI ´
ON DE
INFRAESTRUCTURAS LINEALES MEDIANTE ROBOTS A ´
EREOS . . . 802
Ra´
ul Tapia, Jos´
e Ramiro Mart´ınez de Dios and An´ıbal Ollero
TIEMPO DE VUELO . . . 810
Myriam Vaca Recalde, Luis Paarup Pel´
aez, Enrique Mart´ı Mu˜
noz, Ray
Lattarulo and Xabier Udaeta
Visi´
on por Computador
IDENTIFICACI ´
ON Y CONTEO DE ACEITUNAS EN IM ´
AGENES
DIGITALES TOMADAS EN EL OLIVAR MEDIANTE MORFOLOG´IA
MATEM ´
ATICA Y REDES NEURONALES CONVOLUCIONALES . . . 818
Arturo Aquino, Juan Manuel Ponce, Borja Mill´
an, Diego
Tejada-Guzm´
an and Jos´
e Manuel And´
ujar
ENHANCING TEXT RECOGNITION ON TOR DARKNET IMAGES . . . 828
Pablo Blanco-Medina, Enrique Alegre, Mhd Wesam Al-Nabki, Deisy
Chaves and Eduardo Fidalgo Fernandez
PARALLEL COMPUTING TECHNOLOGIES IN VIDEO
STABILIZATION FOR TEACHING PURPOSES . . . 836
C´
esar Gabriel M´
arquez Rodr´ıguez, Mat´ıas Garc´ıa Rivera, Miguel
Diaz-Cacho Medina and Jos´
e Lu´ıs Cama˜
no Portela
EVALUACI ´
ON DE NUEVOS MODOS DE EMPLEO DE LOS
DESCRIPTORES DE APARIENCIA GLOBAL EN TAREAS DE
LOCALIZACI ´
ON . . . 842
Vicente Rom´
an Erades, Sergio Cebollada Lopez, Luis Paya, Mar´ıa Flores
Tenza, Arturo Gil Aparicio and Oscar Reinoso
LOCALIZACI ´
ON DE ROBOTS M ´
OVILES EN ENTORNOS
INDUSTRIALES USANDO UN ANILLO DE C ´
AMARAS . . . 849
Sara Roos Hoefgeest Toribio, ´
Alvaro Fern´
andez Garc´ıa, Ignacio ´
Alvarez
Garc´ıa and Rafael Corsino Gonz´
alez de Los Reyes
¿ES POSIBLE ENTRENAR MODELOS DE APRENDIZAJE
PROFUNDO CON DATOS SINT´
ETICOS? . . . 859
Noelia Vallez, Alberto Velasco-Mata, Juan Jos´
e Corroto and Oscar Deniz
OPTIMIZACIÓN HEURÍSTICA CON CRITERIOS DE ERROR DE
CONTROL TMD EN TURBINAS MARINAS FLOTANTES
Juan Almenara Ahijón
Universidad Complutense de Madrid, España [email protected]
Matilde Santos Peñas
Universidad Complutense de Madrid, España [email protected]
María Tomás-Rodríguez City, University of London, UK [email protected]
Resumen
De entre el despliegue actual de energías renovables, las turbinas eólicas flotantes son un recurso prometedor. Permiten sacar el máximo rendimiento al viento que se produce en alta mar, donde alcanza una mayor y más constante velocidad. Sin embargo, al estar situadas en aguas profundas están sometidas a fuertes cargas, causadas principalmente por las olas y el mismo viento. Para reducir las vibraciones que se producen en la estructura se pueden usar dispositivos de control estructural, que provienen de la ingeniería civil. Pero su diseño y sintonía no son tareas sencillas debido a los diversos objetivos que coexisten en la aplicación de estos sistemas de control pasivo. En este trabajo se explora el uso de distintos métodos de análisis de señales para la optimización de dispositivos TMD (Tuned Mass Damper) mediante algoritmos genéticos. Se han aplicado diversos criterios de error para la optimización con el fin de obtener una mayor reducción de vibraciones en los diversos elementos de la turbina flotante.
Palabras clave: Modelado y Simulación, Optimización, Turbinas eólicas marinas flotantes, Algoritmos genéticos, Energía renovable.
1
INTRODUCCIÓN
La energía eólica marina generada por turbinas flotantes es una fuente de energía limpia y renovable, ubicada mar adentro, donde se reduce el impacto visual y acústico en comparación con los aerogeneradores en tierra o incluso con las turbinas offshore que están ancladas al suelo marino, cercanas a la costa. Además cuentan con superficies extensas donde desplegar los parques eólicos y con facilidad de transporte al no tener limitaciones respecto a la carga
o las dimensiones. Su principal desventaja es el coste económico de este tipo de proyectos y que, al ser un tema todavía abierto a la investigación, hay pocos datos experimentales para validar los trabajos que se realizan sobre ellas [9].
Las turbinas eólicas marinas flotantes (FOWT, de sus siglas en inglés, Floating Offshore Wind Turbine) se pueden categorizar en función de su estructura en tres grandes grupos, según su método de estabilización (Fig.1): torres flotantes sobre plataformas, turbinas flotantes estabilizadas mediante cables anclados en tensión al lecho marino, y las estabilizadas mediante un balastro.
En este trabajo se plantea, a partir de un modelo de turbina flotante con plataforma, donde se ha implementado un sistema de control estructural TMD (Tuned Mass Dumper), llevar a cabo la optimización de los parámetros del dispositivo de control aplicando diversos criterios de error para las señales del sistema. Para resolver este problema de optimización se han utilizado Algoritmos Genéticos (AG) ya que permiten calcular los parámetros del TMD sin conocer la frecuencia estructural del sistema.
La estructura del artículo es la siguiente. Tras esta introducción, en la sección 2 se presenta el modelo matemático de la turbina flotante y del dispositivo de control pasivo TMD utilizados. En la sección 3 se describe la configuración del AG aplicado y los criterios de error usados para la optimización. En la sección 4 se analizan y comentan los resultados obtenidos de la simulación del sistema con el control. El trabajo termina con las conclusiones y trabajos futuros.
2
MODELO MATEMÁTICO DE LA
TURBINA Y EL TMD
Para la simulación y la optimización se ha usado el modelo no lineal de una turbina flotante con plataforma, donde se consideran despreciables las fuerzas hidrodinámicas y aerodinámicas, ya que el objetivo es estudiar la reducción de fatiga causada en la torre. Este modelo de la turbina flotante [3] está ampliamente aceptado como referencia para la investigación del comportamiento y movimiento de las FOWTs. Recientemente ha sido utilizado por los autores para desarrollar trabajos de investigación dentro del ámbito presentado en esta contribución [10, 11].
La plataforma y la torre, elementos que forman la turbina, tienen cada una un grado de libertad angular, mientras que el TMD tiene un grado de libertad de traslación. El modelado incorpora las perturbaciones en la dinámica de la plataforma, la torre y el dispositivo TMD, pero no incluye las palas de la turbina ni las líneas de amarre ya que en estudios previos se han obtenido resultados que indican que no resulta un factor influyente en la vibración de la estructura [8].
2.1 MODELO MATEMÁTICO TURBINA Para estudiar la dinámica estructural del sistema se utiliza un modelo formado por tres masas que representan la torre, la plataforma y el dispositivo TMD.
La plataforma está conectada a la torre mediante un resorte giratorio y un amortiguador, que representan la fuerza de restauración hidrostática y la amortiguación del agua, respectivamente. La torre también se modela como un resorte giratorio y un amortiguador que representan la torsión y flexibilidad estructural, mientras que el TMD presenta un movimiento lineal sobre un único eje [7].
En las ecuaciones diferenciales que modelan este sistema, (1-3), los subíndices t hacen referencia a la torre, b a la plataforma (barge) y TMD al dispositivo de control estructural. Los términos correspondientes a fuerzas hidrostáticas de restauración y amortiguación del agua se puede modelar como un resorte giratorio (𝑘$) y un amortiguador (𝑑$), unidos a la plataforma [12]. Se han linealizado las funciones trigonométricas ya que los ángulos máximos de desplazamiento que se han alcanzado en estas estructuras en condiciones normales no superan los 10º. Se obtienen las siguientes ecuaciones:
𝐼$𝜃$̈ = −𝑑$𝜃$̇ − 𝑘$𝜃$− 𝑚$𝑔𝑅$𝜃$+ 𝑘1(𝜃1− 𝜃$) +
𝑑12𝜃1̇ − 𝜃$̇ 3 (1)
𝐼1𝜃1̈ = 𝑚1𝑔𝑅1𝜃1− 𝑘1(𝜃1− 𝜃$) − 𝑑1(𝜃1̇ − 𝜃$)̇ − 𝑘456𝑅456(𝑅456𝜃1− 𝑥456) −
𝑑456𝑅456(𝑅456𝜃1̇ − 𝑥456 ̇ ) − 𝑚456𝑔(𝑅456𝜃1−
𝑥456) (2)
𝑚456𝑥456̈ = 𝑘456(𝑅456𝜃1− 𝑥456) + 𝑑4562𝑅456𝜃1̇ − 𝑥456̇ 3 + 𝑑456 (3) En la Tabla 1 se describen las principales variables y sus unidades.
Tabla 1: Parámetros del sistema para el modelo de la FOWT con TMD.
Símbolo Variable
𝐼1,$ Inercia[𝑘𝑔𝑚:] 𝑘1,$ Rigidez [𝑘𝑔𝑚:/𝑠] 𝑑1,$ Amortiguamiento [𝑘𝑔𝑚:/𝑠:] 𝑅1,$,456 Distancia eje de masa- eje de
rotación[𝑚]
𝜃1 Angulo desplazamiento torre [º] 𝜃$ Angulo desplazamiento plataforma [º] 𝑥456 Desplazamiento TMD [𝑚] 𝑑456 Amortiguamiento TMD [𝑘𝑔𝑚:/𝑠:] 𝑘456 Rigidez 𝑇𝑀𝐷[𝑘𝑔𝑚:/𝑠]
𝑚456,1,$ Masa [𝑘𝑔]
2.2 CONTROL ESTRUCTURAL
es muy eficiente a la hora de reducir vibraciones. Está formado por un muelle, un amortiguador y una masa (Fig. 2). El dispositivo se desplaza longitudinalmente sobre la estructura, a una frecuencia de sintonía que coincide con la frecuencia de resonancia de la turbina flotante. En las FOWT se suele instalar en la góndola.
Figura 2: Estructura del TMD
De esta forma, se logra disipar la energía producida por la oscilación de la estructura (Fig. 3).
Figura 3: Efecto del TMD
3
OPTIMIZACIÓN
DEL
TMD
MEDIANTE AG
Uno de los métodos heurísticos más utilizados para la optimización son los Algoritmos Genéticos (AG) [1]. En este problema se va a aplicar esta técnica para encontrar los valores óptimos del sistema TMD, de forma que se reduzca lo más posible la oscilación de la estructura.
Se podría también utilizar la frecuencia de resonancia para amortiguarla, pero eso requiere saber de antemano la frecuencia de la estructura, limitando la posible generalización del método ya que es necesario conocerla para cada FOWT concreta. Otros algoritmos de búsqueda convencionales no se han aplicado porque son computacionalmente muy exigentes, y utilizarlos para optimizar este problema sería una tarea larga y pesada. Por eso se ha decido utilizar una técnica evolutiva, como son los algoritmos genéticos, que permiten definir de forma bastante flexible la función objetivo a optimizar con los parámetros buscados [6].
El algoritmo genético es un método para resolver problemas de optimización basándose en la selección natural. El algoritmo modifica repetidamente una
población de soluciones (individuos). En cada generación, el algoritmo selecciona a algunos individuos de la población actual para ser padres y los utiliza para producir la siguiente generación (mediante el cruce), junto con otros operadores genéticos como mutación y/o reemplazamiento. Durante iteraciones sucesivas la generación evoluciona hacia la solución óptima [5].
3.1 FUNCIÓN DE COSTE
Los tres parámetros a optimizar en este caso son la masa, la constante de amortiguamiento y la rigidez del dispositivo TMD.
Para reducir la oscilación sobre la plataforma se utiliza como función a optimizar el ángulo de desplazamiento de la torre con respecto a la plataforma, concretamente se define éste como señal de error. Es decir, se usa 𝜃1 como señal a minimizar, que se puede definir como el desplazamiento longitudinal del extremo de la torre, tomando como origen el eje perpendicular de la plataforma.
Se va a aplicar como función de coste la definición de cuatro criterios de error que se utilizan con frecuencia para analizar el funcionamiento de los sistemas de control [4]. Se estudia el error en el estado estacionario, puesto que se pretende reducir la amplitud y frecuencia de las oscilaciones.
Los criterios de error que se han usado como función de optimización del algoritmo genético son:
Integral de error cuadrático ISE = ∫ eE :(t) dt
F (4)
Integral de error absoluto
IAE = ∫ |e(t)| dtFE (5) Error cuadrático integral por el tiempo
ITSE = ∫ t · eE :(t) dt
F (6)
Producto del error absoluto por el tiempo
ITAE = ∫ t|e(t)| dtFE (7) La configuración del AG es la siguiente (Tabla 2):
Tabla 2: Configuración del AG. No. Individuos población 50
No. Generaciones 15
Elitisimo (%) 5 %
En este caso, no se ha implementado el operador mutación ya que utilizar una función híbrida excluiría las restricciones declaradas en la función de coste.
4
SIMULACIÓN Y RESULTADOS
Para realizar la simulación se ha usado el software Matlab, y para la optimización la ToolBox de Algoritmos Genéticos, con los valores de la Tabla 2. Se ha implementado el modelo matemático descrito en las ecuaciones (1-3) con los valores de simulación recogidos en la Tabla 3 para el modelo de turbina desarrollado por NREL de 5-MW, equipada con tres palas sobre una plataforma flotante [3].
Tabla 3: Parámetros de la FOWT.
Para el TMD partimos de los parámetros recogidos en el trabajo de [8], representados en la Tabla 3, con los que se comparará la respuesta obtenida.
Para acotar el proceso de optimización se han aplicado restricciones al espacio de solución de cada una de las variables del TMD considerando unos intervalos realistas para la implementación física de estos elementos.
𝑘1IJ ∈ [15000 − 25000] 𝑘𝑔𝑚:/𝑠: 𝑑1IJ∈ [5000 − 15000] 𝑘𝑔𝑚:/𝑠
𝑚1IJ ∈ [15000 − 40000] 𝑘𝑔
4.1 RESULTADOS DE SIMULACIÓN CON LOS CRITERIOS DE ERROR
En la Fig. 4 se muestra el resultado del proceso de optimización del TMD mediante GA utilizando como función objetivo, a modo de ejemplo, el error ISE. En la gráfica de arriba se representa el mejor valor obtenido para la función de coste, y la media en cada iteración. Se puede observar que convergen rápidamente; prácticamente a partir de la 8ª
generación la solución es siempre la misma. No se encuentra una solución que pueda disminuir la función de coste basada en el error de la señal.
La segunda grafica muestra la diferencia media entre los resultados obtenidos en cada población. Se aprecia que según se va acercando la media al valor óptimo, la distancia entre los valores de los individuos de la población se reduce, es decir, cada vez las soluciones son más homogéneas. El último gráfico representa el histograma según el cual se distribuyen los valores obtenidos en la última población generada. En general se puede ver que es un método rápido y que requiere poco tiempo de computación.
Figura 4: Comportamiento del AG para la función criterio de error ISE.
Para los otros criterios de error, IAE, ITSE e ITAE, los resultados son similares. Con el criterio del error ITAE el número de generaciones que tarda en converger es ligeramente menor, en torno a 7; con el IAE es también 7-8, y con ITSE está alrededor de 5. Respecto al histograma, en general presentan poca dispersión y la solución está concentrada en uno o dos valores (ITAE, ITSE) excepto con IAE, aunque en todos los casos el rango de valores de la solución es muy pequeño.
Aplicando la optimización al error cuadrático ISE se obtienen los resultados presentados en la Tabla 5 para los parámetros del TMD.
Tabla 5: Valores óptimos obtenidos por el AG para el criterio de error ISE.
Valor del error ISE 169.52 𝑘1IJ 16586.30 𝑘𝑔𝑚:/𝑠: 𝑑1IJ 13692.26 𝑘𝑔𝑚:/𝑠
𝑚1IJ 38542.14 𝑘𝑔
iniciales, y en naranja con el TMD con los parámetros optimizados. Se puede ver a simple vista cómo se ha reducido el balanceo de la torre al incluir un sistema de control pasivo, que logra estabilizarse sobre los 600s (la simulación es de 1400 s), y cómo con el control optimizado se mejora notablemente, consiguiendo eliminar las oscilaciones a los 200 s. Además, la amplitud de las oscilaciones también se reduce desde el inicio.
Figura 5: Angulo de desplazamiento de la torre sin TMD (azul), con TMD (roja) y con TMD optimizado con el criterio ISE (naranja).
Para realizar las comparaciones entre los distintos criterios de error que se proponen para la optimización se ha utilizado la desviación estándar de la torre, con y sin dispositivo TMD, definida en la ecuación (8). Esta ecuación representa el porcentaje de mejora en función de la oscilación que se produce en la torre con el dispositivo TMD respecto a la oscilación que se produce en la torre sin el mismo.
𝜀 =WXWYZ[
W · 100 % (8)
En la Fig. 6 se muestra la respuesta de la señal en frecuencia obtenida mediante la transformada rápida de Fourier, para analizar cómo se distribuye la potencia que genera la estructura a la frecuencia donde se producen la mayor parte de vibraciones (sin TMD en azul, con TMD línea roja y con TMD optimizado con el criterio ISE en naranja). Se puede observar que con el dispositivo TMD incorporado en la estructura no sólo disminuye la potencia disipada por las vibraciones, sino que además se elimina prácticamente el primer armónico generado en la estructura. Con el TMD optimizado con genéticos la reducción de la potencia es todavía mayor, como se comentará atendiendo a los resultados de la Tabla 7.
Figura 6: Respuesta en frecuencia de la estructura (azul), con TMD (rojo) y con TMD optimizado con criterio ISE (naranja).
Figura 7: Desplazamiento de la torre (arriba), de la plataforma (en medio) y de la masa del TMD (abajo), con el control pasivo sin optimizar (azul) y optimizado (rojo), según el criterio de error ISE.
Se puede observar en todas ellas la reducción de la amplitud de las oscilaciones y la disminución del tiempo en el que el sistema se estabiliza y deja de oscilar.
4.2 COMPARACIÓN DE RESULTADOS PARA LOS CUATRO CRITERIOS DE ERROR
En la Tabla 6 se resumen los valores de los parámetros del TMD obtenidos con cada uno de los 4 criterios de error usados para la optimización. En la última fila se muestran los valores del TMD sin optimizar, con los parámetros de [8].
Tabla 6: Resultados de los parámetros obtenidos mediante la optimización del TMD con los cuatro
criterios de error 𝒌𝒕𝒎𝒅
[𝒌𝒈𝒎𝟐/𝒔] [𝒌𝒈𝒎𝒅𝒕𝒎𝒅𝟐/𝒔𝟐] 𝒎[𝒌𝒈] 𝒕𝒎𝒅 IAE 15584.83 12689.25 39606.54 ISE 15224.58 11677.91 39396.10 ITAE 16303.59 14849.14 39867.02 ITSE 15110.30 14978.49 39435.44 TMD 28885.00 10183.00 40000.00 Con esos valores de los elementos del TMD, en la Tabla 7 se muestran los resultados de simulación del sistema cuando se optimiza el TMD según los diversos criterios de error. En la primera fila se muestra el factor de mejora de la desviación de la torre dado por la ecuación (8). En las siguientes filas se ha calculado la potencia en la frecuencia de resonancia y en el primer armónico, junto a su valor en porcentaje respecto a la potencia generada en la estructura de la FOWT sin el TMD. La columna con etiqueta TMD muestra esos valores de la estructura cuando se ha usado el TMD sin optimizar, y la última columna, FOWT, la vibración de la turbina sin control pasivo.
Tabla 7: Análisis de las señales
Analizando el caso para el criterio de error ISE, hay una mejora en las oscilaciones de la torre respecto a la estructura sin TMD de un 59.23 %, factor que se puede apreciar en la Fig. 7, donde se estabiliza aproximadamente a los 200s. También esta mejora es mayor que si se aplica el TMD con los valores iniciales, sin optimizar. Analizando la respuesta en frecuencia del sistema en la Fig. 6 observamos en la frecuencia de resonancia una reducción de la potencia de un 32.24 %, mientras que en el primer armónico el factor de reducción llega a ser de un 81.08 %. Con respecto a los demás criterios de error, como se comentó, los resultados son muy similares.
5 CONCLUSIONES Y TRABAJO FUTURO En este trabajo se muestra la mejora de la respuesta de una FOWT respecto a reducción de las vibraciones al optimizar un dispositivo de control pasivo TMD mediante algoritmos genéticos. Se han probado cuatro criterios de error que tradicionalmente se usan en la evaluación de los sistemas de control.
Se ha comprobado que incluir en la estructura un dispositivo de control pasivo reduce la carga que sufre el sistema eólico marino, reduciendo los efectos de fatiga, lo que se pueden traducir en un aumento de la vida útil y una disminución del mantenimiento, factores que frenan el desarrollo de estos generadores de energía.
Como trabajo futuro se plantea integrar los métodos de optimización en el software FAST [2], una plataforma que simula las turbinas flotantes incluyendo factores hidrostáticos y aerodinámicos, obteniendo un sistema más cercano a la realidad donde estudiar los efectos de cada criterio de error en función de las condiciones externas. Además, se quiere seguir investigando en la posibilidad de aplicar optimización multicriterio.
Agradecimientos





![Figura 2: Errores en la identificaci´on del objetivo mediante an´ alisis de correlaci´on can´ onica con el banco de datos [10], alterando el comienzo de segmento respecto al est´ımulo real.](https://thumb-us.123doks.com/thumbv2/123dok_es/4023638.679075/96.892.200.701.102.365/errores-identificaci-objetivo-mediante-correlaci-alterando-comienzo-segmento.webp)
