Sistema práctico de cancelación activa de ruidos monocanal
135
0
0
Texto completo
(2) (f~:( TECNOLÓGICO ,.J. DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO INDICE. 1.0. Título del Proyecto ..................................................................................7. 2.0. Introducción ............................................................................................7. 3.0. Problemática ........................................................................................... 9. 4.0. Objetivos ................................................................................................. 1O. 5.0. Estado del arte ........................................................................................ 11 5.1. Generalidades del sonido y del control activo de ruido ............... 12. 5.2. Desarrollo de la tecnología ........................................................... 15. 5.3. Más de los sistemas ANC ............................................................. 16. 6.0. Metodología ............................................................................................ 17. 7.0. Infraestructura ........................................................................................ 18. 8.0. Alcances del proyecto ............................................................................ 19. 9.0. Aplicaciones de la cancelación activa de ruido ...................................... 20. 1O.O. Sistemas de cancelación activa de ruido ............................................... 22 10.1. Sistemas a priori (tecnica feedforward) ....................................... 22 10.1.1 Sistemas feedforward de banda ancha ............................. 22 10.1.2 Sistemas feedforward de banda angosta .......................... 22. 11.0. 10.2. Sistemas a posteriori (técnica feedback) ..................................... 24. 10.3. Sistemas adaptivos ..................................................................... 24. Aplicaciones de los sistemas adaptivos ................................................. 25 11.1. Filtrado digital .............................................................................. 25 11.1.1 Filtros FIR ......................................................................... 26 11.1.2 Filtros IIR ........................................................................... 27. 12.0. Estructuras, algoritmos y aplicaciones de los sistemas adaptivos ......... 29 12.1. Filtros adaptivos .......................................................................... 29. 12.2. Estructuras de los filtros adaptivos .............................................. 31 12.2.1 Estructura transversal ....................................................... 31 12.2.2 Estructura transversal simétrica ....................... ................. 32. 12.3. Algoritmos adaptivos ................................................................... 33 12.3.1 Filtros de Wiener ............................................................... 34 12.3.2 Error Cuadrático Medio ..................................................... 34 12.3.3 Método del descenso más corto MSD .............................. 37 12.3.4 Algoritmo LMS ................................................................. .40 12.3.5 Algoritmo LMS normalizado ............................................. .42.
(3) \ff./ /_te. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 12.3.6 Algoritmo LMS con adición de ruido ................................. .43 12.3.7 Algoritmo FXLMS ............................................................. .44 12.3.8 Algoritmo FXLMS normalizado ........................................ .46 12.3.9 Algoritmo NFXLMS con adición de ruido ......................... .46 13.0. Sistema a utilizar para la cancelación de ruido ..................................... .48 13.1. Trayectoria primaria .................................................................... .48. 13.2. Sistema Feedforward simple ........................................................ 48 13.2.1 Primer modelo ................................................................... .48 13.2.2 Segundo modelo - Sistema feedforward .......................... .49. 13.3. Actualización de coeficientes ....................................................... 50. 13.4. Arreglo de salida .......................................................................... 52. 13.5. Trayectoria secundaria ................................................................ 53. 13.6. Segundo modelo - Inclusión de la trayectoria secundaria ........... 54 13.6.1 Sistema feedforward ......................................................... 54 13.6.2 Segundo modelo del sistema feedforward ......................... 55. 13. 7. Identificación de la trayectoria secundaria ................................... 56 13.7.1 Identificación fuera de línea .............................................. 56 13.7.2 Identificación en línea ........................................................ 57. 13.8. Algoritmo FXLMS - Sistema feedforward .................................... 57. 13.9. Algoritmo FXLMS - Sistema feedback ......................................... 58. 13.1 O Sistema feedback FXLMS-NA con identificación de la trayectoria secundaria en línea ..................................................... 58 13.11 Algoritmo FXLMS con adición de ruido e identificación híbrida ..........................................................................................60 14.0. Resultados .............................................................................................65 14.1. Modificación de la estructura del código ...................................... 65. 14.2. Prueba de mejores condiciones de distancia y ángulo ................. 67. 14.3. Pruebas de atenuación ................................................................. 67. 14.4. Pruebas de cancelación realizadas con AUDACITv® .................. 74 14.4.1 Software utilizado para el análisis ..................................... 74 14.4.2 Pruebas de cancelación realizadas con AUDACITv® ....... 75. 14.5. Identificación híbrida con nivel de ruido blanco variable ............... 81 14.5.1 Ruido variable .................................................................... 81.
(4) ~. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 14.5.2 Pruebas de cancelación con nivel de ruido variable analizadas utilizando el software AUDACITfE>................... 82 14.6. Versión final del código ................................................................ 86. 15.0. Artículos Propuestos .............................................................................. 87. 16.0. Conclusiones ........................................................................................... 88. 17.0. Referencias Bibliográficas ....................................................................... 90. 18.0. Referencias Electrónicas ........................................................................ 91. Anexo A .............................................................................................................92 Anexo B ............................................................................................................. 95 Anexo C ............................................................................................................. 107 Anexo D ............................................................................................................. 112 Anexo E ............................................................................................................. 114 Anexo F ............................................................................................................. 124 Anexo G ............................................................................................................. 132 Anexo H ............................................................................................................. 134.
(5) .·;'j1¡f~r DETECNOLÓGICO MONTERREY. .',.",N. CANCELACIÓN ACTIVA DE RUIDO 1.0.- TÍTULO DEL PROYECTO. SISTEMA PRÁCTICO DE CANCELACIÓN ACTIVA DE RUIDO MONOCANAL. 2.0.- INTRODUCCIÓN. La cancelación activa de ruido (ANC por sus siglas en ingles) involucra un sistema electroacústico o electromecánico que cancela el ruido usando básicamente el fenómeno de superposición y de interferencia destructiva de las ondas. Busca generar una señal de "Antirruido" que tenga la misma amplitud y frecuencia del ruido pero en fase opuesta, para que a la hora de sumar estas señales, la señal resultante sea o tienda a cero.. + Figura 2.1 Ejemplod e cancelación de ruid ideal.. El problema fundamental que se debe de considerar en los sistemas ANC acústicos es el requerimiento de un control muy preciso, alta estabilidad, y por supuesto confiabilidad. Para poder lograr una buena atenuación, la amplitud y fase de la señal de antirruido deben de ser muy exactas, es por esto que se prefieren sistemas que empleen procesamiento digital de señales, ya que este puede ofrecer la suficiente velocidad y precisión para llevar a cabo múltiples operaciones en tiempo real.. Los sistemas de cancelación de ruido tienen que tomar en cuenta las propiedades del campo acústico, las cuales son no estacionarias, es decir, la amplitud, fase y frecuencia del ruido son variables, y sensibles a cambios tan ligeros como un par de grados en la temperatura. Es por esto que los sistemas de cancelación activa de ruido deben ser adaptables. Esta es otra de las razones por las que el procesamiento digital de señales presenta una ventaja, ya que se pueden formar filtros digitales que se puedan adaptar a los cambios en el medio, este tipo de filtros se conoce como filtros adaptivos.. 7.
(6) CANCELACIÓN ACTIVA DE RUIDO. Un filtro adaptivo es un filtro digital que realiza un procesamiento digital de señales y puede adaptar su desempeño tomando en cuenta las señales de entrada y salida. Este modifica sus coeficientes, los cuales son actualizados por un algoritmo adaptivo para optimizarla respuesta del filtro según un criterio deseado de desempeño.. En general los filtros adaptivos consisten en dos partes, un filtro, cuya estructura es diseñada para lograr la función deseada sobre la señal de entrada, y un algoritmo adaptivo, para ajustar los coeficientes del filtro de forma de lograr el mejor desempeño posible.. 8.
(7) TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO 3.0.- PROBLEMÁTICA. El incremento en la población, en equipos comerciales e industriales como aires acondicionados, transformadores y ventiladores, el cada vez mayor número de automóviles y el uso de aparatos electrodomésticos esta haciendo del ruido un problema cada vez más grave y cada vez mas molesto para todas las personas.. Dentro de los diferentes ruidos, hay un tipo conocido como ruido de baja frecuencia, que es irritante y si se llega a estar expuesto por periodos largos, se produce fatiga y pérdida de concentración, esto provoca una disminución en la productividad en las personas. Por otra parte, este tipo de ruidos pueden producir vibraciones que provocan micro fracturas y fatiga en muchos sistemas.. Hay métodos para tratar de controlar este ruido, la forma tradicional es hacerlo mediante técnicas pasivas, generalmente barreras y silenciadores que atenúan el ruido. Los silenciadores pueden utilizar técnicas reactivas combinando tubos y deflectores para eliminar los ruidos indeseables, o resistivos haciendo pasar al ruido por un conducto lleno de un material que es capaz de absorber el sonido. Una de las desventajas de estos sistemas es que su efectividad es baja con ruidos de baja frecuencia, por lo que no son la solución óptima para eliminar este tipo de ruido.. La cancelación activa de ruido utiliza fuentes adicionales para cancelar el ruido original, conocido en estos sistemas como ruido primario. Estos sistemas han generado un gran interés ya que resultan ser muy efectivos a bajas frecuencias, que es el rango de frecuencias en donde los sistemas pasivos fallan.. 9.
(8) \~r~<' , . .,·. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 4.0.- OBJETIVOS. •. Entender las características teóricas de los sistemas de cancelación de ruido. feedback y feedforward. •. Comprender la operación de un sistema de ANC.. •. Lograr un mejor desempeño de un sistema de cancelación activa de ruido a. priori mediante la modificación de parámetros de operación. •. Implementación de un sistema que sea capaz de cancelar el ruido acústico utilizando el DSPTMS320C30 de Texas lnstruments y de una configuración de control retroalimentado que meneje frecuencias en el rango comprendido por las frecuencias límite de 150 y 50GHz.. 10.
(9) TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO 5.0.- ESTADO DEL ARTE. En el campo del procesamiento digital de señales existe una clase de sistemas adaptivos en la cual los coeficientes de un filtro digital se ajustan para minimizar una señal de error, la cual se define como la señal deseada menos la señal de salida del sistema. Estos principios fueron empleados ya en un sistema de cancelación de ruido en duetos basados en la teoría de filtros adaptivos que fue desarrollada por Surges en 1981.. Más tarde en esa misma década, la investigación del control activo de ruido (ANC) se vio dramáticamente afectada por el desarrollo de los poderosos procesadores digitales de señales y el de algoritmos adaptivos para el procesamiento de señales. El avance de la tecnología digital permitió la mejora de los DSP's especializados para el procesamiento numérico en tiempo real de señales digitales. Estos dispositivos han permitido el desarrollo e implementación a bajo costo de poderosos algoritmos adaptivos para el ANC, y ha fomentado el amplio desarrollo y la aplicación de estos sistemas basados en el procesamiento adaptivo de señales digitales.. Muchos canceladores activos de ruido tienen una dependencia muy estrecha con el procesamiento digital de señales pero sin considerar adecuadamente los elementos acústicos. Si el diseño acústico del sistema no se optimiza, el controlador digital no será capaz de atenuar adecuadamente el ruido indeseable. Por lo tanto también es necesario entender la acústica de la instalación y diseñar el sistema para lograr que el controlador realice bien su trabajo.. Debido a las características variantes en el medio en donde ruido acústico se propaga, como el medio ambiente, y tomando en cuenta que el ruido no es estacionario, la cancelación activa de ruido debe hacerse de forma adaptiva para poder copiar estas variaciones 1 . De ahí se deriva el uso de filtros adaptivos que nos. 1. [1JM.Nakano-Miyatake y H. Perez Meana: Fas! orthonized FIR adaptive Filler structure using a recurren! Hopfield-Like. Network, Lectures in Computer Science1606: Foundations and Tools for Neutral Modeling, pp478-487, Springer Verlag, Berlin,. 1999. 11.
(10) i~~' ,. /. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. permitan estimar el ruido no deseado. Los filtros más utilizados son los filtros digitales transversales que usan algoritmos adaptivos de gradiente.. 5.1.- GENERALIDADES DEL SONIDO Y DEL CONTROL ACTIVO DE RUIDO. El sonido es usualmente generado por vibraciones de un objeto o de una superficie, esto puede ser desde el cono de un altavoz, algún instrumento musical o hasta las cuerdas bocales del ser humano. Las superficies vibratorias generan ondas que se propagan a través del medio como sonido.. La frecuencia hace que el tono y la velocidad de un sonido se alteren. Por ejemplo, una guitarra toca a frecuencias más bajas que un violín.. En muchos aspectos el sonido y las vibraciones son muy similares, de hecho será útil pensar en el sonido como vibraciones viajando a través del aire. Muchos de los conceptos se pueden aplicar tanto para el sonido como para las vibraciones, pero definitivamente existen diferencias.. El ruido es simplemente una señal no requerida. El sonido no es ruido a menos que alguien lo escuche y lo encuentre desagradable. Por lo tanto el ruido serán vibraciones que se encuentren en el rango frecuencial de la capacidad auditiva del ser humano.. Mientras la competencia en el mercado es enorme, ciertos productos así como los avances tecnológicos, han llegado a un punto en que los materiales de construcción de edificios y medios de transporte se vuelven más ligeros y por lo tanto más sensibles a filtraciones de sonido, de tal manera que los efectos del ruido acústico se vuelven más evidentes y por lo tanto más desagradables.. Actualmente, en el mercado se cuentan con técnicas pasivas y reactivas para la anulación o reducción del ruido acústico. Hablando específicamente de las técnicas pasivas, se cuenta con filtros físicos como los aislamientos, las barreras y los silenciadores de tal manera que se atenúa aproximadamente la mitad del sonido desagradable, estos sistemas trabajan de una manera muy eficiente para. 12.
(11) . TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO frecuencias altas y medias, pero no así para las frecuencias bajas. Los silenciadores reactivos son aquellos que usan otros métodos, como tubos por ejemplo para eliminar este sonido.. Debido a las ventajas de los sistemas pasivos y las ventajas de los sistemas reactivos, actualmente existe una combinación entre ambos sistemas, eliminando así un rango muy amplio de frecuencias. Recordemos que para que estos sistemas sean eficientes, la longitud de onda acústica debe ser menor a las dimensiones del silenciador ya sea reactivo o pasivo.. El ruido de baja frecuencia suele ser muy molesto al oído, este tipo de ruido se encuentra en diversos lugares además de provenir de distintas fuentes en el medio en el que nos movemos. Se trata de un ruido monótono y repetitivo, imposible de ignorar. Estos ruidos son mucho más comunes que los sonidos desagradables de alta frecuencia.. El Control Activo de Ruido (CAR)2, también llamado cancelación activa de ruido o antirruido, es uno de los temas con más investigación para este campo en éstos días. Las aplicaciones de estas investigaciones funcionan para circunstancias específicas y hasta la fecha no se cuentan con aplicaciones de sitios antirruido, es decir, no se puede aplicar a una casa entera.. La ANC es una modificación en el campo auditivo, particularmente es la cancelación de este campo por medio de medios electroacústicos. En su forma simple la ANC utiliza un altavoz para producir un campo que es exactamente opuesto en imagen al sonido desagradable (llamado ruido primario). El altavoz, por lo tanto y en su manera ideal, cancela la molestia y el resultado neto es que no existe sonido. El control activo es de cualquier manera más complicado que sólo esto.. En la figura 5.1 se ilustra el principio básico de la ANC; en ella se muestra la señal de onda de Ruido (Ruido primario o señal no deseada) y el antirruido (Señal de control). Si suponemos que ambas señales son idénticas pero en contratase, el 2. En inglés Active Noise Control - ANC. 13.
(12) ';~,~/ TECNOLÓGICO ·• .•' DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. resultado será una zona totalmente de silencio. La ANC es un atenuador efectivo para frecuencias bajas de ruido. Para este tipo de frecuencias hemos mencionamos anteriormente que los sistemas tradicionales pasivos son ineficientes, caros o demasiado grandes.. Antiruido. Onda de Ruido. Figura 5.1 Principio básico de cancelación.. El nombre "Control Activo" diferencia este método de los pasivos para controlar los sonidos y vibraciones.. En el control, los 4 elementos principales o sistemas de control activo son:. •. La planta.- es el sistema físico a ser controlado; un ejemplo típico de esto. son algunos audífonos y el aire dentro de ellos, o el aire viajando a través de los duetos de un dueto de aire acondicionado.. •. Los sensores.- son los micrófonos, aceleradores u otros dispositivos que. miden la alteración de algún parámetro y monitorean el comportamiento del sistema de control.. •. Los actuadores.- son dispositivos que físicamente realizan el trabajo de. alterar. la. respuesta. de. la. planta;. usualmente. son. dispositivos. electromecánicos como pueden ser los altavoces o algún generador de vibraciones.. •. El controlador.- es un procesador de señales (usualmente y en nuestro caso. digital) que dirige a los actuadores para que realicen cada uno sus tareas correspondientes.. 14.
(13) TECNOLÓGICO. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. Los controladores análogos también podrán ser usados, aunque de alguna manera son menos flexibles y más difíciles en cuanto su utilización. Posteriormente se hablará de la trayectoria secundaria y con los sistemas análogos es más difícil obtener resultados de manera precisa.. 5.2 DESARROLLO DE LA TECNOLOGÍA. La tecnología e idea de la ANC no es algo nuevo. Fue realizada por primera vez en el año 1936 por Lueg 3 , él utilizó un micrófono y un altavoz controlado electrónicamente para generar una señal canceladora. La patente de Lueg era el principio de los sistemas ANC acústicos, en su tiempo no tuvo una aplicación real.. Posteriormente en los años 50's se realizó un mayor desarrollo. No fue hasta la era de las computadoras digitales modernas, que ayudaron a desarrollar y llevar a cabo más aplicaciones y estudios sobre el ANC. El estudio del Control Activo se volvió de gran interés en los años 70's y BO's. En años recientes investigadores y distintas compañías internacionales han publicado cientos de artículos. Algunos son de compañías dedicadas especialmente a los diferentes productos de control activo, además de que existen muchas universidades y gobiernos que estudian las aplicaciones y las posibles mejoras a los sistemas actuales.. Algunas de las empresas que se dedican especialmente a los productos de ANC son, por citar algunas: ABS GmbH Jena, ANR Headsets, Active Vibration Control lnstrumentation, BBN Physical Systems & Technologies, Causal Systems Pty Ud., Headsets, lnc. y Siemens, empresa la cual cuenta con un cancelador activo de ruido para automóviles.. 3 Lueg, P.. "Process of silencing sound oscillation," U.S. Patent No. 2 043 416, 1936. Generalmente considerado el primer trabajo publicado acerca del tema, aunque la patente de aplicación Alemán de Leug está prefechado por unas semanas.. 15.
(14) \r,f~?' TECNOLÓGICO : .., / DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 5.3 INFORMAICÓN ADICIONAL DE LOS SISTEMAS ANC. En los sistemas ANC la señal de control debe de ser muy precisa en cuanto a fase y amplitud, permitiendo que el sistema sea altamente confiable y que presente gran estabilidad. Para reducir con un alto grado de eficacia la fuente primaria de ruido es necesario que la amplitud y la fase de la fuente de la señal de control se igualen a la de la fuente primaria. Es aquí donde acudimos a un sistema digital, en este caso un procesador digital de señales o DSP con la capacidad suficiente para ejecutar miles de operaciones matemáticas simultáneas en un tiempo mínimo.. El principio del ANC es llamado interferencia destructiva. Un sonido que está moviendo una serie de compresiones (alta presión) y bajas presiones. Si la parte de alta presión de la línea del sonido se alinea con una de baja presión de otra onda, las dos ondas se interfieren destructivamente y por lo tanto ya no existen fluctuaciones. Así se elimina cualquier sonido haciendo notar que la dificultad consiste en que ambas ondas coincidan en tiempo y espacio.. Por otra parte se puede decir que el sistema de control cambia el modo de ver la alteración, por ejemplo se cambia la impedancia de la entrada.. En la mayoría de las aplicaciones, las propiedades del campo acústico o mecánico del ruido no son estacionarias por lo que su amplitud, fase y frecuencia están en constante alteración. Considerando esto, los sistemas de Cancelación Activa de Ruido deben de ser adaptables para ajustar y optimizar la señal de control minimizando la señal de ruido.. 16.
(15) :w~/. TECNOLÓGICO -:,;,,,,,-- DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO 6.0.- METODOLOGÍA. •. Comprensión general del sistema, mediante lectura de artículos y tesis de proyectos anteriores.. •. Entrenamiento, impartido por el asesor, para comprender de manera integral el sistema actual y su funcionamiento para poder agregarle las mejoras en el futuro.. •. Capacitación para utilizar el DSP (Digital Signal Processor) TMS320C30 de Texas lnstruments, con el cual se realizará la implementación física del sistema.. •. Experimentación practica, para verificar el estado actual de funcionamiento del sistema y familiarización con este.. •. Retroalimentación sobre la experimentación del sistema para verificar su correcto funcionamiento, encontrar y reducir errores, y plantear propuestas y desarrollarlas para llegar a un sistema más estable.. 17.
(16) .,~,~~- TECNOLÓGICO .... ,, DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO 7.0.- INFRAESTRUCTURA. •. DSP Texas lnstruments® TMS320C30.. •. Computadora dedicada específicamente al proyecto.. •. 2 Altavoces.. •. Micrófono que cuente con capacidad para variar su sensibilidad.. •. Generador de Funciones.. •. Osciloscopio TDS3032 de Tektronix®.. •. Diferentes tipos de Cables.. •. Espacio dedicado en el laboratorio de diseño de MEMS en Aulas 111. •. Software AUDACITY®.. 18.
(17) :~~~/ TECNOLÓGICO. ,-,,.,,/· DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO 8.0.- ALCANCES DEL PROYECTO. Desarrollar un sistema mejorado de cancelación activa de ruido mediante la implementación de la técnica de ANC feedback y cambios en el código utilizado en el Procesador Digital de Señales. Estos cambios consisten en alterar la secuencia de ejecución, eliminar instrucciones redundantes, proponer nuevas secuencias de comandos para reducir el numero de instrucciones y así mismo aprovechar el tiempo disponible en el DSP para realizar otras acciones como adquisición de coeficientes, procesamiento de nuevas operaciones. También se plantea mejorar el manejo de los registros para optimizar su uso y obtener una mayor libertad en la programación y el desarrollo.. Las mejoras al sistema se basan en tres puntos primordiales: •. Estabilidad: Nuestra meta en este rubro consiste en evitar que un cambio. drástico en la señal de entrada de nuestro sistema propuesto, resulte en una actualización incorrecta de los coeficientes, ocasionando que a la salida del sistema se genere un antirruido que no corresponda al ruido que se quiere eliminar, y por lo tanto a la salida del sistemas se tenga mucho más ruido que el que entra al sistema. •. Convergencia: Para este punto, nuestra meta es lograr que nuestro sistema. logre atenuar el ruido con una mayor rapidez que el sistema actual. •. Atenuación: Se pretende conseguir una atenuación de ruido mayor a la. actual, es decir, atenuar el ruido a la salida del sistema de manera que la disminución de ruido sea de entre 6 y 1O dB's.. El sistema mejorado será resultado de simulaciones en software, implementación mediante el método de prueba y error en el código en lenguaje ensamblador, además de pruebas con el equipo físico con el que se cuenta actualmente. El equipo que se utilizará será el DSP TMS320C30 de Texas lnstruments para el cuál tendremos capacitación en su uso, funcionamiento y programación. Además se nos dará instrucción sobre como utilizar Matlab y LabView para el trabajo paralelo con el DSP.. 19.
(18) )ir,,-: . TECNOLÓGICO ·. , .,.. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 9.0.-APLICACIONES DE LA CANCELACIÓN ACTIVA DE RUIDO. La cancelación activa de ruido tiene cabida en todas las situaciones en las cuales podamos encontrar la presencia de ruido. En especial se han identificado las siguientes áreas de aplicación que se encuentran divididas en los siguientes sectores:. •. Automotriz: Principalmente en mofles y tubos de escape, silenciadores de. automóviles y en la cabina para pasajeros.. •. Doméstico: En aparatos electrodomésticos como refrigeradores, lavadoras,. aspiradoras, licuadoras, etc.. •. Industrial: En maquinas, ventiladores, aires acondicionados, bombas, etc.. •. Sistemas de transporte: En las categorías de trenes, aviones o barcos.. Todas estas fuentes, pueden ser clasificadas desde el punto de vista geométrico, por lo que existen cuatro categorías principales:. •. Ruido en conductos:. Los conductos de ventilación,. calefacción,. aire. acondicionado o extracción. Estos conductos son el medio de transmisión por donde se propaga el ruido acústico. Aquí, los sistemas activos tienen varias ventajas sobre los aisladores pasivos tradicionales, ya que atenúan mejor las bajas frecuencias, proporcionan ahorro de energía debido a la reducción en la resistencia al flujo. Una ventaja en este ámbito en que pueden ser instalados en los conductos ya existentes.. •. Ruido interior: En habitaciones cerradas, cabinas, por ejemplo estudios de. grabación, interiores de automóviles, camarotes de barcos o cabinas de avión.. 20.
(19) -~ .. ";,;.·:,\. .. ~f)it. TECNOLOGICO. }.,:~!:. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. •. Ruido en el espacio libre: El ruido provocado por una construcción. Estos sistemas pueden ser utilizados para reducir el ruido en el lugar de trabajo y en las comunidades cercanas.. •. Protección auditiva personal: Son sistemas que trabajan en un área muy pequeña. La situación más sencilla para un sistema ANC esta definida por un espacio cuyas dimensiones son pequeñas si se comparan con la longitud de onda del rango de frecuencias a cancelar. Este espacio, es el que hay entre un audífono y la membrana del tímpano. Estos sistemas tienen aplicaciones industriales y militares que facilitan la comunicación a distancia entre dos o más individuos.. De acuerdo con los avances que hemos logrado en nuestro proyecto pensamos que la aplicación más viable es la utilización de este sistema para la cancelación de ruido en conductos de aire acondicionado. Esto debido a que el sistema con el que estamos trabajando presenta una cancelación puntual, por lo que el desemepño de un sistema como este no sería el más adecuado en una aplicación en la que se requiera cancelar el ruido en espacios tridimensionales. En el caso de los conductos de aire acondicionado el generador de antirruido se coloca junto al generador de ruido, de esta manera tanto el ruido como el antirruido se propagan de la misma forma por el conducto hasta llegar a la salida, en donde el ruido va a ser cancelado.. Figura 9.1 Aplicación dentro de un sistema industrial de aire acondicionado.. 21.
(20) '~l,íi'. , .'l. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO 10.0.-SISTEMAS DE CANCELACIÓN ACTIVA DE RUIDO. Como ya se había mencionado, existen en general dos tipos de ruido en el ambiente, el ruido de banda ancha el cual es provocado por turbulencias y es aleatorio y el ruido de banda angosta, que es periódico o cuasiperiódico y generado la mayoría de las veces por máquinas rotatorias.. Dependiendo del tipo de ruido que se desea procesar, los sistemas ANC utilizan alguna de las dos siguientes técnicas de control:. •. Sistemas a priori (tecnica feedforward). •. Sistemas a posteriori (técnica feedback). 10.1.- SISTEMAS A PRIORI (TECNICA FEEDFORWARD):. En esta técnica, el sistema de control recibe al menos una señal de entrada (referencia) que va a ser procesada para generar una señal de control, la suma de estas dos señales,. es la señal de error que se envía al sistema también para. ayudar con la generación de la señal de control. Estos sistemas son capaces de generar señales de control tanto para sistemas de banda ancha, como sistemas de banda angosta.. 10.1.1.-SISTEMAS FEEDFORWARD DE BANDA ANCHA. En estos sistemas se tiene una señal indeseable, llamada ruido primario que es capturada por un sensor. El ruido, una vez captado por el sensor se va a convertir en la señal de referencia. Esta señal es entregada al sistema adaptivo con la finalidad de generar una señal de control en una etapa central utilizando un actuador, en este caso un altavoz, con el fin de atenuar el ruido primario presente en el sistema. Posteriormente en la última etapa del sistema se tiene un sensor de error que verifica el nivel de ruido residual presente, retroalimentándolo al sistema adaptivo con el propósito de que el sistema adaptivo reduzca el ruido aún más.. 22.
(21) i~Y.K;,· TECNOLÓGICO :;,,".'f.~ DE MONTERREY, CANCELACIÓN ACTIVA DE RUIDO. Fuente de ruido. Antirruido Señal de control. Ruido Primario. Sensor de ruido primario. Ruido residual. Activador. Sistema adaptivo. Señal de referencia. Sensor de ruido residual. Señal de error. Figura 10.1 Sistema Feedforward de banda ancha.. Si el ancho de banda del sistema adaptivo y la distancia entre el sensor de referencia y el actuador permite que se respete el principio de causalidad, la señal de control generada por el sistema adaptivo podrá ser tanto de banda ancha como de banda angosta.. Estos Sistemas presentan un problema, este es que la fuente secundaria o el altavoz frecuentemente actúa sobre el sensor de referencia, lo que reduce el desempeño del sistema y puede llegar a provocar oscilaciones que provocan que el sistema se salga del área deseada de operación.. 10.1.2.- SISTEMAS FEEDFORWARD DE BANDA ANGOSTA. Como sabemos, el ruido de banda angosta es provocado por máquinas rotatorias y tiende a ser periódico. Gracias a esta característica, el sensor de referencia puede ser reemplazado por un sensor no acústico tal como un tacómetro o un sensor óptico para capturar de forma indirecta la señal a cancelar. La ventaja de estos sistemas es que no son sensibles a la señal de control generada por el sistema.. Fuente de ruido. T. . ". . -. Antirruido Señal de control. Ruido Primario. Ruido residual. -. ~. ~. Sensor no acústico de ruido primario. Generador de señal de referencia. -. Señal de referencia. . ". ........... --- ·--Sistema adaptivo. Activador. Sensor de ruido residua 1. -. ~. Señal de error. Figura 10.2 Sistema feedforward de banda angosta. 23.
(22) ',ri~:/ ,, .. J. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 10.2.- SISTEMAS A POSTERIOR/ (TÉCNICA FEEDBACK):. Estos sistemas se caracterizan por no poseer una señal de referencia a la entrada, generan internamente su propia señal de referencia mediante el uso de un estimador lineal. Esa señal es procesada por un sistema adaptivo para generar una señal de control.. En estos sistemas la señal de error es procesada para generar una señal de control que tenga un corrimiento de fase de 180° respecto al ruido primario presente. El sistema va a tratar de predecir la señal de ruido presente en el sensor de error puesto que no tiene información a priori de esa señal, es por esto que los sistemas a posteriori solo podrán cancelar aquellas señales que sean periódicas.. Fuente de ruido. . Ruido Primario. .. Antirruido Señal de control. Ruido residual. -. ~. ........... ,..,.,,...,. Activador. ~. Sistema adaptivo. Sensor de ruido residual. ~ ~. Señal de r r ero. Figura 10.3 Sistema feedback. Sin embargo, estos sistemas no son sencillos de utilizar, ya que si existe algún error en la respuesta de fase del sistema adaptivo, la señal de control generada por el sistema, en lugar de cancelar el ruido primario lo incrementará aumentando la amplitud de la señal de error y provocando que el sistema se desestabilice.. 10.3.- SISTEMAS ADAPTIVOS. Un sistema adaptivo es un sistema que puede automáticamente ajustarse a un ambiente o a una señal de entrada que cambia continuamente. Para poder construir este tipo de sistemas es necesaria la implementación de los filtro adaptivos, que varían sus coeficientes de acuerdo con un determinado algoritmo el cual busca maximizar o minimizar determinado parámetro del sistema. Los sistemas adoptivos buscan "aprender" las características de la señal y rastrear en ella pequeños cambios.. 24.
(23) TECNOLÓGICO. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO 11.0.- APLICACIONES DE LOS SISTEMAS ADAPTIVOS. Los sistemas adaptivos pueden tener muchas y muy variadas aplicaciones, a continuación se mencionan algunas aplicaciones básicas donde han demostrado buena funcionalidad. Dentro del campo de la identificación de sistemas han mostrado resultados, ya que el sistema adaptivo evoluciona hasta ser igual a un sistema desconocido utilizando un sumador, al restar uno del otro se busca que la señal sea cero, y esto se logra solo hasta que el sistema adaptivo es idéntico al desconocido. En el modelado inverso de sistemas, tienen muchas aplicaciones sobre todo en la eliminación de ruido a la salida de los sistemas, se busca proporcionar el modelo inverso de un sistema desconocido con la finalidad de que la interacción de ambos sistemas genere una señal libre de distorsión. Otra aplicación que ha arrojado buenos resultados es la cancelación de interferencia, aquí se tiene una señal con ruido (modificada por el ambiente) y a la entrada del sistema se tiene solamente la señal del ruido sin haber sido modificada, lo que se busca es que esta señal, se aproxime a la señal de ruido modificada por el ambiente y al restarlas tengamos a la salida solamente la señal, libre de ruido. 11.1.- FILTRADO DIGITAL. Los sistemas adaptivos mencionados anteriormente contienen al menos un filtro digital y un algoritmo adaptivo. Naturalmente el uso de este tipo de filtros presenta ciertas ventajas y desventajas que se enumeran a continuación. Ventajas •. La respuesta en frecuencia puede ser ajustada automáticamente.. •. No varían con cambios ambientales y no necesitan calibración periódica.. •. Se pueden usar a muy bajas frecuencias.. •. Los datos de operación de estos filtros se almacenan en una memoria.. 25.
(24) Wf/ :, .rJ. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. Desventajas •. El ancho de banda de estos filtros está limitado por la velocidad de procesamiento del sistema.. •. Poseen un ruido inherente provocado por la conversión A/D.. •. Pueden llegar a comportarse de forma inestable.. Los filtros digitales, pueden clasificarse de acuerdo con su respuesta al impulso. Existen filtros de Respuesta Finita al Impulso (FIR) y Filtros de Respuesta Infinita al Impulso (IIR). La diferencia principal es que los filtros FIR son no recursivos y tienden a converger de forma mas lenta, pero proporcionan estabilidad, mientas que los filtros IIR son recursivos, convergen mas rápido pero tienen la gran desventaja de que tienden a ser inestables. 11.1.1.- FILTROS FIR. Un filtro FIR se describe en forma matemática por la siguiente ecuación: N-1. y(n). = ¿h;x(n -. i) (11.1). i=O. Donde h; corresponde a N términos de la respuesta al impulso del filtro. En el procesamiento digital de señales se utiliza la variable w para indicar los coeficientes de un filtro adaptivo. N-1. y(n) = x(n) * w(n) = ¿w;x(n - i). (11.2). i=O. y(n). = úJoX(n) + w x(n -1) + ... + wN_ 1. 1. x(n - N + 1). (11.3). Si obtenemos la transformada Z de la función tenemos:. Y( z ) -- X( z )( Wo +W¡Z -1 + ... +wN-lz -(N-1)). Y(z). = X(z)W(z). (11.4). (11.5). 26.
(25) CANCELACIÓN ACTIVA DE RUIDO. Donde W(z) esta dada por:. W(z)=cv 0 +cv,z- 1+ ... +cvN_,z-<N-i¡. N-1. = ¿cv;z-; i=O. W(z). = cv0 z. N-1. + cv1z z. N-2 N-1. + ... + cv. (11.6). N-1 (11.7). Estos nos indica que la función de transferencia W(z) tiene polos solamente en el origen. Como consecuencia, los filtros FIR son inherentemente estables. Además, estos filtros pueden ser utilizados para garantizar linealidad de fase, con ello todas las componentes senoidales de una señal de entrada serán retrasadas la misma cantidad de tiempo. También es importante mencionar que estos filtros tienen un error numérico que no es acumulable. 11.1.2.- FILTROS IIR Matemáticamente se puede describir a un filtro IIR por la siguiente ecuación:. y(n). "'. = ¿h;x(n -. i). (11.8). i=O. Donde h; representa la respuesta al impulso del filtro. La forma anterior pareciera ser poco practica ya que requiere de un almacenamiento en memoria infinito, por esto, se utiliza una forma recursiva para expresar la respuesta del filtro, misma que se muestra en la siguiente ecuación. N. y(n). = ¿a;x(n i=O. M. i)- ¿b;y(n - i) i=I. (11.9). En la ecuación 10.9 a; y b; son los coeficientes del filtro. De la ecuación 11.9 podemos notar que dado que y(n) depende de las salidas anteriores, el filtro IIR es un sistema retroalimentado.. 27.
(26) '-i1ir,;. '-. .. J. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO N. ¿a;z-; H(z) =. _i=_oM_ _. 1+ ¿b;z-; i=O. (11.10). Se puede ver claramente que se trata de un sistema con polos y ceros, lo cual lo hace que sea menos estable que un sistema FIR, pero su comportamiento dinámico supera al sistema de estos. Estos sistemas presentan distorsión de fase, en ellos, el error numérico es acumulable, y pueden presentar inestabilidad durante su operación. Los sistemas IIR necesitan menos coeficientes que un filtro FIR para tener el mismo desempeño, esto permite una implementación más sencilla; sin embargo, si no se diseñan adecuadamente, los filtros IIR pueden presentar un comportamiento no esperado conduciendo a los sistemas a la desestabilización.. 28.
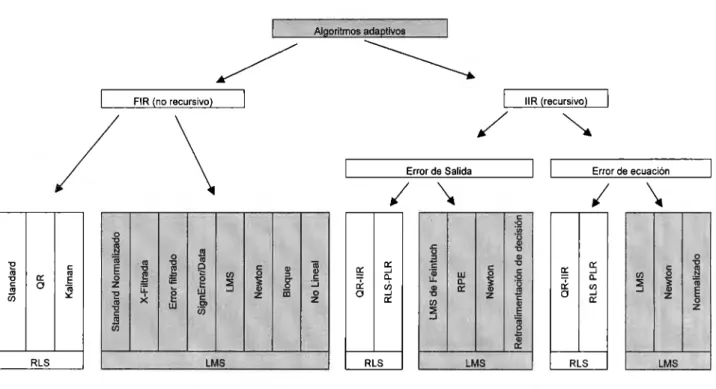
(27) '',:~r;r· TECNOLÓGICO ~!,; DE MONTERREY. CANCELACIÓN ACTIVA DE RUIDO 12.0.- ESTRUCTURAS, ALGORITMOS Y APLICACIONES DE LOS SISTEMAS ADAPTIVOS 12.1.-FILTROS ADAPTIVOS. Como ya se ha mencionado, los filtros adaptivos se usan para aplicaciones en las que se trabaja con señales que provienen de un medio de estadística desconocida o cuando las señales mismas no son fácilmente predecibles. La principal característica de este tipo de filtros es que sus coeficientes son dinámicos, es decir, que pueden variar con el tiempo. La señal de referencia de un filtro adaptivo puede variar de acuerdo a las posibilidades del sistema, si se trata de un sistema feedforward, la señal de referencia se toma de fuera o si se trata de un sistema feedback donde la señal de referencia se genera internamente. En ambos sistemas la señal de control generada es producto de una interacción entre la señal de error y la señal de referencia. Los filtros adaptivos pueden ser usados en varias aplicaciones que requieren operaciones en tiempo real, por ejemplo, predicción adaptiva, ecualización de canales, cancelación de eco y cancelación de ruido. La implementación de un filtro adaptivo basada en procesadores digitales de señales (DSP) tiene muchas ventajas sobre otros enfoques. No sólo por que los requerimientos de potencia, espacio y manufactura, son muy reducidos, sino que además, el hecho de poderlos programar provee flexibilidad para la actualización del sistema y mejoras del software.. 29.
(28) ·w~t , .r,¿..,. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. !. Algoritmos adaptivos. IIR (recursivo). FIR (no recursivo). 1. /. / \. Error de Salida. Error de ecuación. I \. I. e:. \. :Q 1/J. o. "O. .§ "E. "'e:. "O. .!!!. o::. o. en. e: E IV. "'. :.::. IV. E o. z. "E. "'e:. "O. "'e. "O. "" ¡¡:. x. o. : "O. o:. g. w. ·~. .,:;. "O. o. ~. o. .:::. en. g. ::!:. w e:. ....J. O>. e:. o. (1). :::,. 'i. g. z. ai. (1). IV (1) e: :.:;. o::. g¡. ....J. o.. o:. ch ....J o::. o. o. z. :::,. 'E. ·¡¡; u. (1). "O. (1). e:. w. ~. o.. o::. (1). z. en. .!!! e:. o::. g¡. ....J. o. ....J. o.. o:. en o::. o. e:. o. en. I. ::!: ....J. z. ,!;. ....J. .!!!. e: ·¡¡ -O. (1). ::!:. üi. "O. IV. en. ~. o:: RLS. LMS. RLS. LMS. RLS. LMS. Figura 12.1 Tipos de algoritmos adaptivos.. A continuación se presenta un diagrama a bloques de un filtro adaptivo que podría en determinado momento utilizar algoritmos LMS (Least Mean Squares) o RLS (Recursive Least Squares).. x(n). Filtro variable. d(n). COn. Algoritmo adaptivo. e(n). Figura 12.2 Diagrama general de un sistema adaptivo.. Como podemos ver en el diagrama, se busca que la señal de entrada una vez pasada por el filtro se vuelva igual a una señal deseada d(n), modificando el algoritmo (los coeficientes del filtro) alimentándolo con la señal de error. Cuando el error se hace cero, nuestra señal de salida del filtro es igual a la señal deseada y los coeficientes del filtro se dejan de actualizar.. 30. "O. .§ IV. E o. z.
(29) .'jff/ TECNOLÓGICO. :,... ,"··' DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 12.2.- ESTRUCTURAS DE LOS FILTROS ADAPTIVOS. 12.2.1.-ESTRUCTURA TRANSVERSAL. La estructura transversal, es la estructura que se utiliza más comúnmente con los filtros adaptivos. En esta estructura, el filtro tiene una sola entrada u(n) y una sola salida y(n).. La función de salida del filtro esta expresada por la ecuación 12.1:. N-1. y(n) = úl (n )u(n) =¿ W; (n µ(n - i). (12.1). i=O. Donde: y(n) es la salida del filtro. w(n) es el vector de coeficientes del filtro. u(n) es el vector de entrada al filtro (u(n) = x(n)). N es el orden del filtro. 11(11-I) í"""='il 1------~---+ •••. 11(n-N+2). •••. + - - - - · •••. y(n). FIGURA 12.3 Estructura transversal de un filtro adaptivo.. En este caso el vector de coeficientes w(n) es controlado directamente por el algoritmo adaptivo que se utilice con el filtro, y es un vector que puede variar con el tiempo.. 31.
(30) \~r~/ ·,, .. ,·. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 12.2.2.- ESTRUCTURA TRANSVERSAL SIMÉTRICA (LATTICE). La característica de respuesta de fase lineal de un filtro es algunas veces deseable, ya que permiten al sistema mantener la integridad de la señal con un retardo de grupo constante en el filtro. Un ejemplo de estos son las imágenes digitales y las comunicaciones.. Un filtro FIR con simetría en el dominio del tiempo tal que,. (12.2). Tiene una respuesta lineal de fase en el dominio de la frecuencia, por lo que el número de coeficientes se reduce a la mitad en una estructura transversal. Así, el vector de entrada se hace:. u(n)= [u(n)+ u(n - N + 1),u(n -1)+ u(n - N + 2), ... ,u(n - N 12 + !)+ u(n - N ! 2)]T. (12.3). Y por lo tanto la salida del filtro y(n) se vuelve:. N 12. y(n)= ¿cv;(n)[u(n- i)+ u(n- N + l + i)]. (12.4). i=O. 32.
(31) ;)1,fljj TECNOLÓGICO. 0. i.,.,/. DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. Tea-.. u(n-1). u ( n ~ z.. ¿. z. -1. • • e-+--...J.--. u(n-N + 1). >-------· ... ,----y(n). Figura 12.4 Estructura transversal simétrica de un filtro adaptivo.. 12.3.- ALGORITMOS ADAPTIVOS. El objetivo de los algoritmos adaptivos es obtener los coeficientes de los filtros adaptables para lograr que la operación del sistema sea la adecuada, en otras palabras, que converja de manera rápida a la minimización de la señal de error siendo capaz de modificar los coeficientes si las condiciones de operación del sistema varían con el tiempo. De esta manera podemos garantizar que el sistema va a ser capaz de producir el antirruido más adecuado para cancelar la señal d(n).. Se tienen que considerar las siguientes características para poder diseñar un algoritmo adaptivo adecuado, como velocidad de convergencia, estabilidad del sistema, capacidad de seguimiento, robustez, necesidades físicas e informáticas, estructura y propiedades numéricas. Los algoritmos más utilizados en filtros adaptivos son los que están basados en el algoritmo LMS (Least Minimum Square), el cual proviene de los filtros de Wiener y por lo tanto considera el Método del Descenso más Corto (MSD). Los filtros de Wiener utilizan un método numérico que nos sirve para obtener los coeficientes de la manera más eficiente minimizando el error cuadrático medio. La operación del filtro de Wiener requiere conocer estadística del sistema lo cual es prácticamente imposible en un sistema real por lo. 33.
(32) w~: ,,/. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO que se tiene que utilizar ergodicidad y de esta manera se pueden utilizar promedios en el tiempo para obtener los coeficientes del filtro.. 12.3.1.- FILTROS DE WIENER. Los filtros de Wiener son estocásticos, es decir, requieren conocimiento previo de la estadística de la señal. Además, se asume que la señal es estacionaria y que sus promedios de ensamble son iguales a sus promedios en el tiempo, es decir que la señal es ergódica. Los filtros de Wiener utilizan una estructura FIR y así evitan que los polos del sistema se encuentren fuera del círculo unitario, garantizando estabilidad. Entonces considerando ergodicidad y estabilidad se utilizan los promedios en el tiempo para correlacionar la señal de error con la señal de entrada,. y así formular una ecuación recursiva que ajuste por medio de iteraciones los coeficientes del filtro.. 12.3.2.- ERROR CUADRÁTICO MEDIO. Para obtener un desempeño adecuado se busca minimizar una función de prueba que para el caso del Método del Descenso más Corto será el Error Cuadrático Medio (MSE - Mean Square Error). Entonces, para lograr una estimación del algoritmo LMS se utiliza un valor instantáneo del MSE.. Por lo tanto el. comportamiento del filtro dependerá directamente de la densidad espectral de potencia de la señal de entrada.. Para lograr minimizar el error en el criterio del MSE se busca una función costo y se eligen los parámetros de optimización. En los filtros de Wiener la función costo es el valor esperado del cuadrado de la señal de error. (12.5). Utilizando la forma básica de los filtros transversales tenemos:. y(n). = w-r~(n). e(n)= d(n)- y(n). (12.6 y 12.7). 34.
(33) :;~r~r · ,, "''º. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. w= (Wa, cv. Los coeficientes del filtro son. ~. = (x(n ), x(n -1 ), ... , x(n - (N -1 ))). 1 , •••• ,. cvN-i. Y = cv;,. con i = O, 1, ... ,N-1, y. son valores presentes y pasados de la señal de. referencia de un filtro de orden N. Entonces tenemos que:. (12.8). Las matrices de autocorrelación R y correlación cruzada p se definen como:. R = E[x(n)xr(n)]. (12.9). = El;(n )d(n)J. (12.10). p. Si sustituimos las matrices de correlación en la función costo tenemos que:. (12.11). Para minimizar la señal de error utilizamos el gradiente de la función costo igualado a cero para obtener sus valores mínimos.. -. v'c;=2Rcv-2p=O. Entonces el mínimo de. (12.12). e; es:. Ecuación Wiener-Hopf. (12.13). Sustituyendo esto en la función de costo tenemos que:. (12.14). 35.
(34) ]1ir~'. ,,.,,.,.,. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO Este resultado tiene algunas características importantes, primero es que existe un mínimo único. Además, este desarrollo cumple con la propiedad de ortogonalidad. Al utilizar el gradiente de. ~. se utilizó la derivada parcial respecto a los co¡ coeficientes. del filtro, de donde se obtiene:. E[e 0 (n )x(n - i)] = O Esto quiere decir que. e0 (n) y x(n). error mínimo, y tampoco lo están. (12.15). no están correlacionados cuando se logra un. e0 (n) y y(n).. 36.
(35) CANCELACIÓN ACTIVA DE RUIDO Por otro lado cualquier ruido que no esté correlacionado con la entrada. x(n). no será. procesado y por lo tanto no existirá cancelación para el mismo, por lo que '='mm ;: . no tiene que ser cero . -T. e; = e;min + V. -. RV. ~=(;_;o) Transformando. ~-··= Qr ~,. (12.16 y 12.17). siendo Q la matriz de vectores propios de la matriz R. tenemos: N-1. e; = c;m in + ¿ A; V;2. (12.18). i=O. En donde A¡ son los valores propios de la matriz Q.. 12.3.3.- MÉTODO DEL DESCENSO MÁS CORTO MSD. El método del descenso más corto se encarga de minimizar la función costo reemplazando las funciones estadísticas por alguna estimación de ellas. De la ecuación 11.13 o de Wiener-Hopf podemos obtener los valores óptimos de w0. ,. sin. embargo el cálculo de este valor puede resultar muy complejo cuando el orden del filtro es grande. El MSD se encarga de facilitar este proceso. Primero se deben estimar los coeficientes del filtro comenzando con una asignación temporal como ;(O). Luego se tiene que encontrar la variación en que la función costo crece más rápido, que es v7 e; y posteriormente se actualizan los coeficientes cuando decrece más rápido, es decir, - v7 e;, y tenemos que la actualización de los coeficientes se da por:. (12.19). De esta manera el proceso se repite hasta que los cambios en los coeficientes del filtro sean mínimos o no existan.. 37.
(36) \if~.' .·,,, /. TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. Del procedimiento del cálculo del error cuadrático medio tenemos que:. -. v'<; = 2Rw-2p = O. (12.20). Al sustituirlo en la ecuación de actualización de coeficientes:. (12.21). Con una matriz identidad I de dimensión N x N,. (12.22). Y haciendo el cambio de variable (; ~;,) resulta. ;,(k + 1) = (I. - 2µA)~(k). (12.23). En donde A es la matriz de valores propios de R. Esta ecuación también se puede escribir de la siguiente manera:. (12.24). A partir de esta ecuación sabemos que para que cada valor converja a cero es 1 necesario que O < µ < _!_ < - - . Esta ecuación no funciona con el algoritmo LMS ya A¡ Ama., que éste requiere parámetros más robustos para determinar µ.. La curva de aprendizaje de un filtro es el camino que sigue la función costo a lo largo del algoritmo, es decir cuando. ~. es función de k o ~=~(k). Obviamente k. siempre tiende al infinito y la función costo siempre tiende a. ~min,. el cual es el error. mínimo obtenido a la salida del filtro. Cada valor propio A¡ determina un modo de convergencia o trayectoria particular en la curva de aprendizaje. Es por esto que se. 38.
(37) :w~?. -;;. ... '.. :,·. TECNOLÓGICO ·,,., .. ,.,. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO tiene que determinar el máximo tiempo de convergencia dada la dispersión que tienen los valores propios de una matriz de autocorrelación (R).. Suponiendo que la señal alcanza una atenuación de 8,69 dB el tiempo. de. convergencia del sistema está dado por:. (1 - 2A;µ )". =. exp( ~~ J. En donde cada modo de convergencia está dado por (1 - 2).,¡µ), y si (1 - 2).,¡µ. (12.25). f. << 1. el tiempo de convergencia es: 1 r:::::--. '. (12.26). 4,\µ. Como podemos ver el tiempo que toma cada modo de convergencia es distinto dependiendo de cada valor propio de la señal. Los valores propios de la matriz de autocorrelación están relacionados con la densidad espectral de potencia de la señal de referencia, por lo tanto los modos de convergencia variarán dependiendo del contenido de las diversas bandas de frecuencia. En otras palabras a las bandas con gran contenido les corresponderán valores propios de valor máximo y los modos de convergencia serán rápidos, y las que estén pobremente excitadas tendrán modos de convergencia lentos. Dado que la característica principal del ruido blanco es que tiene una excitación constante en todas las bandas de frecuencia, se es posible lograr una convergencia rápida ya que los valores propios de su matriz de autocorrelación son muy similares o iguales.. Prácticamente ninguna señal se comporta como el ruido blanco por lo que es importante determinar el valor de µ para que se optimice en mayor problema todo el proceso. El valor óptimo de µ se encuentra entre 11 - 2µ)., 111 ¡11 1 y 11 - 2µ11. 111 ª' 1, valores que marcan las velocidades extremas de todos los modos de convergencia. Por lo tanto, el valor del coeficiente de corrección óptimo está dado por:. µopr. =. 1. /Lmin. +. 1. (12.27). /Lmax. 39.
(38) CANCELACIÓN ACTIVA DE RUIDO. Cuando el coeficiente de corrección es óptimo la velocidad de convergencia está limitada por el valor propio con el modo de convergencia más lento, siendo éste el de. Amin·. (12.28) Entonces si sustituimos µ 0 pt en la ecuación anterior tenemos que:. /3 = a -. 1=. a+I. (~J-1 ,1"'ª'. (A·] ~+l. (12.29). Amax. Siendo a la dispersión de los valores propios de la señal de referencia, determinando la velocidad de convergencia ya que cuando éste valor es 1,. p es. igual a cero y esto quiere decir que el MSD converge instantáneamente.. 12.3.4.- ALGORITMO LMS. El algoritmo LMS o Least Mean Square es producto directo del método del descenso más rápido, sin embargo el algoritmo LMS es capaz de procesar la información sin conocer la estadística de la señal de referencia. La diferencia principal entre ambos algoritmos es que mientras el MSD garantiza velocidad de convergencia el algoritmo LMS garantiza estabilidad, lo que es efectivo cuando la señal de entrada no es estacionaria.. A diferencia del error cuadrático medio el algoritmo LMS tiene la siguiente función costo: (12.30). Y la actualización de coeficientes está dada por:. (12.31). 40.
(39) :;·~,,~Y6! "' TECNOLÓGICO , .••, DE MONTERREY, CANCELACIÓN ACTIVA DE RUIDO Partiendo de:. e(n)= d(n)- y(n). (12.32). (12.33). Entonces resolvemos. e2 (n)= (d(n)- y(n))2 = d 2 (n)-2d(n)y(n)+ y 2 (n). (12.34). El resultado del gradiente es:. 2. ae (n) = le(n)ae(n) = le(n/(d(n)- y(n)) a~ a~ a~. (12.35). 2. ae (n) = -2e(n) a(y(n )) 8úJ¡ 8úJ¡ Pero como. (12.36). y(n) = x(n )úJ(n) (12.37). Por lo tanto la ecuación que expresa la actualización de los coeficientes de los filtros es:. ~(n + 1) = ~(n )+ 2µe(n );(n). (12.38). Lo que esta ecuación quiere decir es que la actualización de los coeficientes toma en cuenta los valores presentes y pasados de la señal de referencia además del error actual ponderados por el factor de corrección µ. La curva de aprendizaje de '. <;(n) no será igual a la del algoritmo MSD. Mientras el algoritmo MSD garantiza la trayectoria más corta en la cual. -úJ. convergerá a. -úJo, el algoritmo LMS garantiza. estabilidad del proceso, lo cuál es muy útil en sistema cuya entrada es cambiante.. 41.
(40) ·w~? TECNOLÓGICO ·, . .,.- DE MONTERREY. CANCELACIÓN ACTIVA DE RUIDO. 12.3.5.- ALGORITMO LMS NORMALIZADO. El algoritmo LMS normalizado o NLMS introduce una técnica para hacer independiente el coeficiente de corrección de la potencia de la señal de referencia manteniendo el mismo comportamiento en estado estable. En este algoritmo el valor de µ es variable siendo función del inverso de la potencia de la señal de entrada x(n). Los coeficientes del filtro w(n) se ajustan aplicando el siguiente factor de corrección:. I. am(n + I) = m(n + I )- m(n) = l x 2 (n ~I x(n )e(n) = µ(n )x(n )e(n). (12.39). Cuando la potencia de la señal de entrada es grande se reduce el coeficiente de corrección variable, y cuando es pequeña el factor se hace grande, garantizando estabilidad y velocidad de convergencia. Además, existe el valor de escalamiento lJ' para evitar que al inicio del algoritmo el factor. l x ~n ~I pueda 2. generar un valor. extremadamente grande o pequeño afectando el desempeño del filtro, de esta manera se optimiza el punto de partida de µ(n). A pesar de esto existen problemas cuando los valores de la señal de entrada son chicos, es por esto que se le agrega un valor constante a. l x (n ~I 2. para evitar que el coeficiente de corrección sea. demasiado grande con entradas muy pequeñas o iguales a cero. Este algoritmo garantiza una velocidad de convergencia mayor que el algoritmo LMS. La ecuación del algoritmo NLMS queda de la siguiente manera:. m(n + 1) = m(n )+a+. : 11. 2. (n ~I x(n )e(n) = m(n )+ µ''(n )x(n )e(n). (12.40). a>O. 42.
(41) TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO 12.3.6.- ALGORITMO LMS CON ADICIÓN DE RUIDO. Como ya se había mencionado antes, el ruido blanco al tener contenido espectral en todo el ancho de banda, un valor promedio es cero y un valor efectivo es constante; la dispersión de los valores propios de la señal es muy reducida o nula, lo que hace que exista una convergencia rápida. Basado en esto, el algoritmo LMS con adición de ruido o LMS-NA le adiciona una señal r(n) (ruido blanco) a la señal de referencia para poder modificar las características temporales y espectrales de la señal mejorando la velocidad de convergencia. La señal de ruido blanco no debe de estar correlacionada con la señal de referencia. El algoritmo LMS-NA está definido como:. cv(n + 1) = cv(n) + µ(x(n) + r(n ))e(n). (12.41). Al añadirle ruido blanco a la señal x(n) lo que se hace es reducirla dispersión de sus valores propios, permitiendo una mejor velocidad de convergencia. Si sabemos que 2. en la ecuación de dispersión "A muestra los valores propios mínimo y máximo y cr es el valor efectivo del ruido blanco tenemos que:. Ama, + (J'2. a=--·- 2. (12.42). Amin + (J'. Asumimos que. CY. 2. >>. Arnin. 2. Amax + (J' Ama, a = - -2 - < - - · (J'. (12.43). Amin. (12.44). Al sumarle ruido blanco a la señal x(n) disminuye la dispersión de los valores propios, sin embargo el valor efectivo de r(n) establece un valor mínimo en la señal de error, siendo esto una desventaja de este algoritmo.. 43.
(42) \~~/ TECNOLÓGICO ,<,/ DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. 12.3. 7 .• ALGORITMO FXLMS. Hasta este punto todos los algoritmos que se pueden utilizar en sistemas muy sencillos de cancelación activa de ruido tanto a priori como a posteriori, sin embargo es fundamental hacer unos cambios para lograr la operación óptima de un ANC. Una modificación de suma importancia es la introducción. en el sistema de la. trayectoria secundaria y sus debidas consideraciones en el algoritmo LMS. La trayectoria secundaria s(n) considera todas las etapas por las que pasa la señal de control antes de encontrarse con la señal de la trayectoria primaria d(n), además de las etapas que cruza la señal de error antes de entrar al algoritmo adaptivo. Todas estas etapas incluyen el convertidor D/A, filtros pasabajas y el transductor de salida. De no incluir la consideración de la trayectoria secundaria el algoritmo no sería capas de converger debido al retraso obvio que el procesamiento introduce en las señales de control y error.. El esquema más utilizado para compensar el efecto de s(n) en el sistema es la A. incorporación de un modelo estimado de la trayectoria secundaria denominado s(n) en la trayectoria de la señal de referencia x(n) rumbo a la actualización de los coeficientes del filtro adaptivo. De esta manera obtenemos el algoritmo FXLMS o "Filtered X LMS". Ruido d(n). Señal interna de referencia. Filtro adaptivo w(n). A. x(n). y(n) s(n). Error e(n). A. s(n) A. x'(n). Algoritmo LMS. y' n. A. Figura 12.9 Sistema feedback considerando la trayectoria secundaria. s(n) y la trayectoria secundaria estimada s(n). 44.
(43) TECNOLÓGICO DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. El algoritmo de control comienza con la señal de error:. e(n)= d(n)- y'(n)= d(n)-s(n)* y(n). (12.43). El gradiente estimado es:. A. V c;(n) =. -2x'(n )e(n). (12.44). En donde: A. x'(n) = s(n) * x(n). (12.45). La ecuación recursiva del algoritmo FXLMS para un sistema feedfotward de cancelación activa de ruido es:. w(n + 1) = w(n) + 2µx'(n )e(n). (12.46). Y para un sistema feedback la ecuación recursiva es:. A. w(n + 1) = w(n )+ 2µ x'(n )e(n). (12.47). A. en donde. x'(n). es la señal de referencia estimada y filtrada generada de manera. interna, y está dada por: '. A. x'(n)= s(n)*x(n). (12.48). El valor de µ está dado por; 2. 0<µ<---. (12.49). Px(N+t:i.). 45.
(44) Wf/ , ., /. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. En donde Px es la potencia de la señal de referencia filtrada, N es el número de coeficientes del filtro y !l es el orden del filtro equivalente introducido por la trayectoria secundaria estimada.. 12.3.8.- ALGORITMO FXLMS NORMALIZADO. Tal y como sucedió con el NLMS, el NFXLMS ofrece un mejor desempeño que el FXLMS incrementando la velocidad de convergencia. La ecuación de este algoritmo es la siguiente:. (12.50). En donde a es una constante y \fes un valor entre O y 2.. 12.3.9.- ALGORITMO NFXLMS CON ADICIÓN DE RUIDO. Se ha buscado un método para aumentar estabilidad, velocidad de convergencia y reducción de dispersión de los valores propios en el algoritmo NFXLMS. El método más adecuado es agregar ruido blanco al algoritmo FXLMS, resultando el FXLMSNA. El desarrollo de este algoritmo es como sigue. A. A la señal. x'(n) se le agrega. ruido blanco,. A. A. x',," (n) = x'(n )+ r(n). (12.51). Y se actualizan los coeficientes del filtro adaptivo con la consideración anterior, resultando:. (12.52). 46.
(45) \~fíj/ TECNOLÓGICO ', , ,,.-. DE MONTERREY.. CANCELACIÓN ACTIVA DE RUIDO. En la siguiente figura se presenta un sistema NFXLMS-NA con la estimación de la trayectoria secundaria fuera de línea, es decir que se hace antes de poner en operación el filtro adaptivo, sin embargo en el desarrollo de nuestro proyecto. s(n) es. también vamos a usar una estimación en línea. En este diagrama. actualizado fuera de línea y permanece fijo a lo largo de la operación del sistema.. Ruido d(n). Señal interna de referencia. Filtro adaptivo w(n). A. y(n) s(n). n). x(n) A. s(n). ,. A. s(n). x'(n) Algoritmo LMS. y'(n. Generador de ruido blanco r(n). Figura 12,10 Sistema feedback NFXLMS-NA con estimación de la trayectoria secundaria fuera de linea. Tecnológico de Monterrey, Campus Ciudad de México. Biblioteca. 47.
(46) ':W~:· TECNOLÓGICO DE MONTERREY, ,,_ ,,e. CANCELACIÓN ACTIVA DE RUIDO 13.0.- EVOLUCIÓN DEL SISTEMA A UTILIZAR PARA LA CANCELACIÓN DE RUIDO. Para poder hablar del sistema plenamente, hay que establecer que para poder llegar al sistema definitivo, hay que empezar desde el sistema más sencillo para poder comprender mejor cada uno de los elementos que conforman el sistema completo. Además se facilita la explicación de cada ecuación y de cómo éstas se tienen que ir adecuando para adaptarse al sistema que formaremos al final de todos estos modelos y aproximaciones.. 13.1.- TRAYECTORIA PRIMARIA. La trayectoria primaria, es el camino principal que sigue el sonido, en este caso el ruido, desde la fuente que lo genera hasta el destino. En los modelos que utilizaremos para explicar el funcionamiento y las ecuaciones, a la trayectoria primaria, se le designará la simbología p(n). Este será el camino por el cual el ruido generado, viajará hasta el punto en donde se comparará con la salida del sistema para generar la señal de error.. 13.2.- SISTEMA FEEDFORWARD SIMPLE. 13.2.1.-PRIMER MODELO. Para. poder llegar a lo que será el sistema definitivo que usaremos para la. cancelación de ruido, tenemos que empezar utilizando una primera aproximación, la cual presenta el modelo más simple de todos los que utilizaremos más adelante.. Este modelo, solo cuenta con un micrófono para la entrada, un altavoz para la salida, otro micrófono para captar la diferencia entre el ruido que viaja por la trayectoria primaria y la señal de antirruido que es enviada por el para que en ese punto se cancelen.. 48.
(47) .:.•.. \11i~t TECNOLÓGICO · ,, . ,,,, DE MONTERREY. CANCELACIÓN ACTIVA DE RUIDO. d(n) ~ -+-. ~ w(n). ~. Figura 13.1 Primer modelo de un sistema feedforward simple .. A la salida se desea que la señal y(n) sea igual que la señal deseada d(n) pero en contratase . Esto ocasionaría que la señal de error, que es captada en el segundo micrófono, fuera cero. Si no es cero, se tiene que buscar una y(n) que si no logra igualar a la señal deseada pero en contratase , se aproxime lo más que se pueda para minimizar el error. La ecuación del error queda de la siguiente forma: e(n) = d(n)- y(n). (13.1). e(n):::: d(n)- y(n). (13.2). O en su defecto. En donde: d(n). = A0 x(n) + A1x(n -1) + A 2 x(n d(n). 2) + .... = x(n) ® p(n). y(n) = x(n) ® w(n) = w 0 x(n) + w 1x(n - 1) + w 2 x(n-2) + .. .. 13.2.2.-SEGUNDO MODELO - SISTEMA FEEDFORWARD. En el segundo modelo de la nuestra primera aproximación se introduce el algoritmo adoptivo que se explica con más detalle en secciones anteriores. En este modelo se tiene que alimentar el algoritmo adaptivo con la señal de entrada que también entra al filtro. El filtro adaptivo es retroalimentado con el algoritmo adaptivo, actualizando los coeficientes para que así, la señal de salida y(n) se aproxime cada vez más a la señal deseada d(n) y el error se reduzca hasta que llegue a cero . En la siguiente figura se muestra el modelo:. 49.
(48) )1ir,ÍÍ/ \,~/. TECNOLÓGICO DE MONTERREY,. CANCELACIÓN ACTIVA DE RUIDO. Trayectoria Primaria p(n). d(n). ~~ -+-. ~. ~ Algoritmo Adaptivo (A.A.). Figura 13.2 Segundo modelo feedforward simple.. En donde la ecuación del algoritmo adaptivo queda de la siguiente manera:. w(n + 1). = w(n) + µe(n)x(n). (13.3). Esta ecuación presenta de manera muy clara que la actualización de coeficientes se basa en la. en la muestra anterior, el error actual, la entrada actual y el factor. ajustable µ. Este algoritmo es muy eficiente para que la actualización sea eficiente y nuestro sistema converja de una manera más rápida. El vector w(n), está formado de la siguiente manera:. w(n). = [w(n), w(n -1), w(n - 2), ... , w(n -. N + !),]. (13.4). ó w(n). = [cv(n), w(n -1), w(n -. 2), ... , w(n -(N -1 )) ]. (13.4a). 13.3.- ACTUALIZACIÓN DE COEFICIENTES. Para comprender como se lleva acabo esta actualización de coeficientes, mostraremos un ejemplo en el cual utilizaremos sólo 3 coeficientes para propósitos demostrativos.. Con N=3 coeficientes el vector co(n) queda de la siguiente manera: w(n). = [cv(n), w(n -. 1), w(n - 2)]. (13.5). 50.
Figure



+7




Documento similar
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
En la parte central de la línea, entre los planes de gobierno o dirección política, en el extremo izquierdo, y los planes reguladores del uso del suelo (urbanísticos y
