DISEÑO DE UN NODO DE SENSADO REMOTO INALÁMBRICO
USANDO ELEMENTOS RADIANTES DE ALTA GANANCIA
CESAR ANÍBAL ECHEVERRY MORENO
MARTHA AURORA GONZALEZ JARAMILLO
Universidad Distrital Francisco José de Caldas
Facultad de Ingeniería
Proyecto Curricular Ingeniería Electrónica
Bogotá, Colombia
DISEÑO DE UN NODO DE SENSADO REMOTO INALÁMBRICO
USANDO ELEMENTOS RADIANTES DE ALTA GANANCIA
CESAR ANÍBAL ECHEVERRY MORENO
MARTHA AURORA GONZALEZ JARAMILLO
Trabajo de grado para optar al título de:
Ingeniero Electrónico
Director
Ing. Gustavo Adolfo Puerto Leguizamón, PhD
Codirector
Ing. Carlos Arturo Suárez Fajardo, PhD.
Universidad Distrital Francisco José de Caldas
Facultad de Ingeniería
Proyecto Curricular Ingeniería Electrónica
Bogotá, Colombia
III
Nota de aceptación.
______________________________________ ______________________________________ ______________________________________ ______________________________________ ______________________________________
______________________________________ Jurado.
______________________________________ ______________________________________ ______________________________________ ______________________________________ ______________________________________
Agradecimientos
A nuestro director Gustavo Adolfo Puerto Leguizamón y codirector Carlos Arturo Suarez Fajardo por su apoyo constante, por impartirnos su sabiduría y conocimiento, les damos gracias por brindarnos la oportunidad de pertenecer al grupo de investigación GRECO, por permitirnos aprender y por mostrarnos que el conocimiento no tiene fronteras y que la única manera para acceder a él es la voluntad.
A nuestros padres y familiares por su compañía, por su apoyo incondicional, por ayudarnos a ser mejores personas e impulsarnos en el día a día a ser profesionales ejemplares.
V
Resumen
El presente trabajo se realiza como proyecto de grado para optar por el título de ingeniero electrónico de la Universidad Distrital Francisco José de Caldas. El proyecto de investigación se desarrolla dentro del grupo GRECO (Grupo de Radiación Electromagnética y Comunicaciones Ópticas).
En este trabajo se realiza el estudio de los nodos comercializados para la implementación de redes de sensado inalámbrico y a partir de ellos, se desarrolla un prototipo de un nodo propio con mejoras en los aspectos que se describen a continuación.
Para el nodo de sensado propuesto e implementado se desarrolla una antena log-periódica directiva de doble resonancia, con el fin de concentrar la energía transmitida hacia una sola dirección, permitiendo tener un manejo más eficiente de la misma y obtener mayores alcances con respecto a las antenas comerciales. La implementación de doble resonancia se realiza con el fin de agregar prestaciones al nodo, tales como la posibilidad de tener un respaldo en caso de fallas en la comunicación o para permitirle al usuario elegir una única frecuencia acorde a las necesidades del entorno. Adicionalmente, se implementa un nodo de sensado con antena SPA de alta ganancia con el propósito de obtener mayores alcances. Se seleccionaron algunos sensores típicos de las áreas que usan las redes de sensores, eligiendo aquellos compatibles con una gran variedad de aplicaciones, explicando su funcionamiento y proponiendo métodos de lectura y acondicionamiento para cada uno de ellos.
Se implementan tecnologías nuevas para el acondicionamiento y procesamiento de los datos, al usar un PSoC (Programmable System-on-Chip) como unidad lógica de control y lectura, permitiendo ahorrar componentes de hardware y brindando pautas de uso para trabajos futuros que pretendan usar dicha tecnología.
Contenido
1. GENERALIDADES ... 18
1.1 INTRODUCCIÓN ... 19
1.2 FORMULACIÓN DEL PROBLEMA ... 20
1.3 JUSTIFICACIÓN ... 20
1.4 OBJETIVOS ... 21
1.4.1 Objetivo General... 21
1.4.2 Objetivos Específicos ... 21
1.5 ALCANCE Y LIMITACIONES ... 22
1.5.1 Alcance ... 22
1.5.2 Limitaciones ... 22
2. NODO DE SENSADO ... 23
2.1 RED DE SENSORES INALÁMBRICA ... 24
2.1.1 Definición ... 24
2.1.2 Estructura de red de una WSN ... 25
Nodo de sensado o Mota ... 26
2.2 ESTADO DEL ARTE ... 27
2.2.1 Trabajos e investigaciones similares ... 27
2.2.2 Mercado ... 28
2.3 DESARROLLO DEL SISTEMA EMBEBIDO ... 32
2.3.1 Consideraciones ... 32
2.3.2 Sensores ... 33
2.3.3 Sistema de radios ... 45
2.3.4 Unidad de procesamiento ... 47
2.3.5 Desarrollo del Software del nodo ... 57
2.3.5.1 Lectura de sensores. ... 57
2.3.5.2 Modos de funcionamiento ... 72
3. SISTEMA DE COMUNICACIÓN ... 84
3.1.1 Protocolo ZigBee y 802.15.4... 85
3.1.1.1 Protocolo 802.15.4 ... 86
3.1.1.2 Protocolo ZigBee ... 86
3.1.1.3 Topologías de Red ... 87
3.1.1.4 Dispositivos XBee ... 87
3.2 ANTENA ... 88
3.2.1 Definición ... 88
3.2.2 Parámetros fundamentales de una antena ... 88
3.2.3 Tipos de antenas ... 92
3.3 ESTADO DEL ARTE ... 94
3.3.1 Antenas Redes de Sensores Inalámbricas ... 94
3.3.2 Antenas de doble resonancia ... 96
3.3.3 Antenas de XBee comerciales ... 97
3.4 ESPECTRO RADIOELÉCTRICO ... 97
3.4.1 Bandas de Frecuencia ... 97
3.4.2 Normatividad ... 99
3.5 JUSTIFICACIÓN DOBLE RESONANCIA ... 100
3.6 DISEÑO ... 101
3.6.1 Diseño SPA ... 102
3.6.2 Diseño Log-Periódica ... 104
3.7 SIMULACIONES ... 112
3.7.1 Preliminares: Antena SPA con ranuras ... 112
3.7.2 Simulaciones Finales Antena Logarítmica- Periódica ... 114
3.7.3 Simulaciones Finales SPA ... 117
4. INTEGRACIÓN ... 120
4.1 INTEGRACIÓN SISTEMA EMBEBIDO Y ANTENA ... 121
4.1.1 Sistema de Conmutación ... 121
4.1.2 Esquema de Unión Antena-PCB ... 122
4.2 DESARROLLO DEL HARDWARE ... 122
4.2.1 Bloque de alimentación. ... 123
4.2.3 Bloque de Comunicaciones UART ... 124
4.2.4 Bloque RF ... 125
4.2.5 Circuito Impreso ... 126
4.2.6 Diseño de Hardware para nodo de 2,4Ghz ... 127
5. RESULTADOS ... 129
5.1 RESULTADOS DE LA ANTENA ... 130
5.1.1 Resultados antena log-periódica ... 130
5.1.2 Resultados antena SPA ... 135
5.1.2 Alcance de los XBee... 139
5.2 RESULTADOS NODO DE SENSADO ... 143
5.2.1 Resultado de la elaboración del Hardware. ... 143
5.2.2 Resultado de la mota de 2.4 GHz ... 144
5.2.3 Resultado de la Carcasa ... 144
5.2.4 Pruebas y mediciones de consumo de corriente. ... 145
5.2.5 Pruebas de configuración y puesta en marcha. ... 146
5.2.6 Pruebas de medición de sensores... 151
5.2.7 Comparación de los resultados con otras motas. ... 159
6. APORTES E IMPACTOS DEL DESARROLLO DEL PROYECTO ... 160
6.1 APORTES ... 161
6.1.1 Carácter original o innovativo de la propuesta ... 161
6.1.2 Aporte al fortalecimiento de la capacidad nacional de investigación, innovación y desarrollo tecnológico ... 161
6.1.3 Aporte a la competitividad a nivel internacional ... 162
6.1.4 Aporte a la consolidación de un área estratégica (smart cities) ... 162
6.2 IMPACTOS ... 162
6.2.1 Científicos y tecnológicos en el grupo de investigación ... 162
6.2.2 En la productividad y competitividad de la empresa o sector productivo que use el producto ... 163
6.2.3 Impacto sobre la sociedad... 163
6.2.4 Impacto en la economía nacional y/o regional ... 163
6.3.1 Evaluación del mercado para la innovación de la propuesta frente a
competidores ... 164
7. CONCLUSIONES ... 167
7.1 CONCLUSIONES ... 168
7.2 TRABAJOS FUTUROS ... 168
Lista De Figuras
Figura 2.1. Componentes Generales de una Red WSN, tomada de [2] ... 24
Figura 2.2. Topologías de red de una WSN, tomada de [2] ... 25
Figura 2.3. Diagrama de bloques general de una MOTA, tomada de [2]. ... 26
Figura 2.4.Waspmote, tomado de [21] ... 28
Figura 2.5. XBee IO Pro, tomado de [22] ... 29
Figura 2.6. Mica2, tomado de [23] ... 29
Figura 2.7. MicaZ, tomado de [23] ... 30
Figura 2.8. Lotus, tomado de [23] ... 30
Figura 2.9. Iris, tomado de [23] ... 31
Figura 2.10. Imote2, tomado de [24] ... 31
Figura 2.11 Kit eZ430-RF2500, tomado de [25] ... 32
Figura 2.12. Sensor LM35, tomado de [26]. ... 35
Figura 2.13. Sensor HIH-4000-002, tomado de [27] ... 36
Figura 2.14. Curva de respuesta del Sensor HIH-4000-002, tomado de [27]. ... 36
Figura 2.15. Sensor DHT11, tomado de [28] ... 37
Figura 2.16. Inicialización del sensor DHT11, tomado de [28]. ... 38
Figura 2.17. Confirmación de inicialización del sensor DHT11, tomado de [28]. ... 38
Figura 2.18. Representación de un "0" en el sensor DHT11, tomado de [28]. ... 39
Figura 2.19. Representación de un "1" en el sensor DHT11, tomado de [28]. ... 39
Figura 2.20. Comunicación Controlador - Sensor, tomado de [28]. ... 39
Figura 2.21. Sensor CMPS10, tomado de [29] ... 40
Figura 2.22. Pines del sensor CMPS10 en modo I2C, tomado de [29]. ... 40
Figura 2.23. Sensor de movimiento, tomado de [30] ... 41
Figura 2.24. Sensor de distancia por luz infrarroja GP2Y0A02YK, tomado de [31] ... 42
Figura 2.25. Curva característica del sensor GP2Y0A02YK, tomado de [31]. ... 42
Figura 2.26. Sensor HC-SR04, tomado de [32] ... 43
Figura 2.27. Proceso de lectura del sensor HC-SR04, tomado de [32]. ... 43
Figura 2.28. Sensor GA1A2S100SS, tomado de [33]. ... 44
Figura 2.29. Curva de respuesta del sensor GA1A2S100SS, tomado de [33]. ... 44
Figura 2.30. CY8CKIT-059 PSoC® 5LP Prototyping Kit, tomado de [43] ... 49
Figura 2.31. Interface de usuario del PSoC Creator, tomado de [44]... 50
Figura 2.32. Bloque de Pin Analógico en el PSoC Creator ... 51
Figura 2.33. Pin de entrada digital en el PSoC Creator ... 51
Figura 2.35. Bloque temporizador en el PSoC Creator. ... 52
Figura 2.36. Módulo ADC en PSoC Creator ... 53
Figura 2.37. Conector en Hardware para interrupción. ... 54
Figura 2.38.Modulo RTC del PSoC Creator ... 55
Figura 2.39. Bloque resonador a 32.768 KHz ... 55
Figura 2.40. Bloque I2C del PSoC Creator. ... 56
Figura 2.41. Módulo UART en el PSoC Creator ... 56
Figura 2.42.Diagrama de flujo LM35 - 1 ... 57
Figura 2.43. Diagrama de flujo LM35 - 2 ... 58
Figura 2.44. Curva para acondicionamiento del sensor de humedad relativa HIH-4000_002 ... 58
Figura 2.45. Diagrama de flujo HIH-4000-002 1 ... 59
Figura 2.46.Diagrama de flujo Diagrama de flujo HIH-4000-002 2 ... 59
Figura 2.47. Pin con entrada y salida con enable para lectura de sensor DHT11 ... 60
Figura 2.48. Tiempos de lectura del sensor DTH11. ... 60
Figura 2.49. Función de inicialización del sensor DHT11 ... 61
Figura 2.50. Función de lectura del sensor DHT11 ... 61
Figura 2.51. Función principal para lectura del sensor DHT11 ... 62
Figura 2.52. Diagrama de flujo lectura de sensor CMPS10 parte 1 ... 63
Figura 2.53. Diagrama de flujo lectura de sensor CMPS10 parte 2 ... 64
Figura 2.54. Conexión entre pin de entrada del sensor de movimiento y la interrupción. ... 65
Figura 2.55.Diagrama de flujo para el sensor de movimiento. ... 65
Figura 2.56. Montaje de laboratorio para determinar voltajes de salida del sensor ... 66
Figura 2.57. Distancia vs Voltaje de salida del sensor GP2Y0A02YK ... 67
Figura 2.58. Diagrama de flujo para el sensor GP2Y0A02YK ... 68
Figura 2.59. Diagrama de flujo principal para lectura de sensor HC-SR04 ... 69
Figura 2.60. Diagrama de flujo de la interrupción del temporizador para lectura del sensor HC-SR04 ... 69
Figura 2.61. Conexión de resistencia en la salida del sensor, tomado de [33]. ... 70
Figura 2.62. Diagrama de flujo para lectura del sensor GA1A2S100SS ... 70
Figura 2.63. Divisor de voltaje para medición de nivel de voltaje en la batería ... 71
Figura 2.64. Diagrama de flujo para la medición del nivel de batería del nodo... 72
Figura 2.65.Diagrama de flujo del modo de configuración - Parte 1 ... 74
Figura 2.66. Diagrama de flujo del modo de configuración - Parte 2 ... 75
Figura 2.67. Diagrama de flujo de las funciones de configuración de Fecha y Id del nodo 76 Figura 2.68. Diagrama de flujo del modo de demostración. Parte 1 ... 78
Figura 2.69. Diagrama de flujo del modo de demostración. Parte 2 ... 79
Figura 2.70. Diagrama de flujo de la función leer sensores. ... 79
Figura 2.71. Diagrama de flujo de la función seleccionar radio... 80
Figura 2.72. Diagrama de flujo del modo de trabajo. ... 82
Figura 3.1 Diagrama de un sistema de comunicaciones [45] ... 85
Figura 3.2.Pila de protocolos de los estándar 802.15.4 y ZigBee [46] ... 86
Figura 3.3. Topologías de red ... 87
Figura 3.4. Tipos de antenas de los XBee ... 88
Figura 3.5 Tipos de diagrama de radiación antenas a) tridimensional b) 2D polar c) 2D cartesianas [51] ... 90
Figura 3.6 Lóbulos de radiación [52] ... 90
Figura 3.7 Vista antena parche microstrip [54] ... 92
Figura 3.8 Métodos de excitación antenas microstrip a) coaxial b) inserción c) proximidad d) apertura [53] ... 93
Figura 3.9. Espectro Radioeléctrico ... 98
Figura 3.10 Enlaces de una red a) campo lejano b) campo cercano [73] ... 100
Figura 3.11 Red Inalámbrica con radios de 900MHz y de 2.4GHz ... 101
Figura 3.12 Simulación S11 antena SPA con dimensiones calculadas f=2.44GHz ... 103
Figura 3.13 Dimensiones antena SPA fabricada ... 104
Figura 3.14 Estructura antena log-periódica de dipolos [50] ... 105
Figura 3.15 Contornos estimados de directividad constante, σ vs τ de log-periódica de dipolos agrupados [80] ... 105
Figura 3.16 Simulación S11 dimensiones calculadas log-periódica sustrato RF30 ... 109
Figura 3.17 Dimensiones finales antena log-periódica ... 110
Figura 3.18 Comparación del acople de impedancia con diferentes sustratos ... 111
Figura 3.19 Comparación de la ganancia con diferentes sustratos ... 111
Figura 3.20 Geometría SPA con ranuras a) vista 2D b) vista 3D ... 113
Figura 3.21 Diagrama de radiación 3D SPA con ranuras a) 915MHz b) 2.44GHz ... 113
Figura 3.22 Diagrama de radiación 2D coordenadas polares SPA con ranuras a) 915MHz b) 2.44GHz ... 113
Figura 3.23 Distribución de corriente SPA con ranuras a) capa superior b) capa inferior . 114 Figura 3.24 Resultados simulación SPA con ranuras a) S11 b) ganancia ... 114
Figura 3.25 Geometría antena log-periódica a) vista 2D b) vista 3D ... 115
Figura 3.26 Distribución de corriente log-periódica a) f=915MHz b) f=2.44GHz ... 115
Figura 3.27 Diagrama de radiación 3D log-periódica a) f=915MHz b) f=2.44GHz ... 116
Figura 3.28 Diagrama de radiación 2D coordenadas polares log-periódica a) f=915MHz b) f=2.44GHz ... 116
Figura 3.29 Diagrama de radiación 2D coordenadas cartesianas log-periódica a) f=915MHz b) f=2.44GHz ... 116
Figura 3.30 Resultados simulación S11 antena log-periódica ... 117
Figura 3.31 Resultados simulación ganancia antena log-periódica ... 117
Figura 3.32 Geometría antena SPA F=2.44GHz a) vista 2D b) vista 3D ... 118
Figura 3.33 Distribución de corriente antena SPA F=2.44GHz ... 118
Figura 3.35 Simulación parámetros S11 antena SPA f=2.44GHz ... 119
Figura 3.36 Simulación ganancia antena SPA f=2.44GHz ... 119
Figura 4.1. Esquema SPDT RF3023 [13] ... 121
Figura 4.2 Esquema de integración antena-mota... 122
Figura 4.3.Diagrama de bloques del Hardware ... 123
Figura 4.4. Esquema electrónico del bloque de alimentación. ... 123
Figura 4.5. Diagrama Electrónico del bloque de puertos y procesamiento. ... 124
Figura 4.6. Diagrama Electrónico del bloque de comunicación UART ... 125
Figura 4.7. Diagrama Electrónico del bloque RF ... 125
Figura 4.8. Diagrama Electrónico completo del nodo de sensado inalámbrico ... 126
Figura 4.9. Circuito impreso del nodo de sensado inalámbrico. ... 127
Figura 4.10. Circuito impreso del nodo de sensado inalámbrico de 2,4GHz ... 128
Figura 5.1 Antena log-periódica fabricada a) Capa superior b) Capa inferior ... 130
Figura 5.2 Medición S11 log-periódica ... 131
Figura 5.3 Medición vs simulación S11 log-periódica ... 131
Figura 5.4 Montaje medición de ganancia log-periódica ... 132
Figura 5.5 Medición ganancia log- periódica ... 132
Figura 5.6 Medición vs simulación ganancia log-periódica ... 133
Figura 5.7 Montaje para la medición del diagrama de radiación ... 134
Figura 5.8 Medición diagrama de radiación log-periódica a) F=2.44GHz b) F=915MHz 134 Figura 5.9 Antena SPA construida F=2.44GHz ... 135
Figura 5.10 Medición S11 de antena SPA F=2.44GHz ... 136
Figura 5.11 Medición vs simulación de S11 antena SPA F=2.44 GHz ... 136
Figura 5.12 Montaje medición de ganancia antena SPA ... 137
Figura 5.13 Medición ganancia antena SPA ... 137
Figura 5.14 Medición vs simulación ganancia antena SPA ... 138
Figura 5.15 Medición diagrama de radiación antena SPA F=2.44GHz ... 139
Figura 5.16 Terreno en tabio para las pruebas de alcance del XBee a) vista rural b) carretera ... 140
Figura 5.17 Vista de los puntos de recepción en tabio a) vista satelital b) vista mapa ... 140
Figura 5.18 Vista del terreno para las pruebas vía ALO ... 141
Figura 5.19 Vista del punto de recepción en ALO a) vista mapa b) vista satelital ... 141
Figura 5.20 Vista satelital enlace XBee con antenas a) SPA 2.4GHz b) Log-Periódica 2.44GHz c) Log-Periódica 915 MHz ... 142
Figura 5.21 Vista del mapa enlace XBee con antenas a) SPA 2.4GHz b) Log-Periódica 2.44GHz c) Log-Periódica 915 MHz ... 142
Figura 5.22. Circuito impreso implementado sin PSoC ni radios XBees... 143
Figura 5.23. Hardware Completo de la mota, Antena Log-periódica y PCB de electrónica. ... 143
Figura 5.25 Carcasa a) mota antena log-periódica b) mota antena SPA ... 145
Figura 5.26 Carcasa mota antena log-periódica a) vista superior b) vista lateral ... 145
Figura 5.27 Carcasa mota antena SPA a) vista superior PCB b) vista lateral c) vista superior antena ... 145
Figura 5.28. Parámetros de comunicación serial para configurar la Mota. ... 147
Figura 5.29 Información de fábrica o por defecto mostrada en el modo de demostración 147 Figura 5.30. Información mostrada en el modo de configuración del nodo ... 148
Figura 5.31. Activación de los sensores 05 y 07. ... 148
Figura 5.32. Configuración de Id del nodo. ... 149
Figura 5.33. Modificación de fecha y hora del nodo. ... 149
Figura 5.34. Configuración del tiempo de muestreo en el modo de trabajo... 150
Figura 5.35. Cambio de las configuraciones de los radios. ... 150
Figura 5.36. Tramas enviadas por el nodo en modo de trabajo. ... 151
Figura 5.37. Información mostrada en el modo de Demostración. ... 151
Figura 5.38. Temperatura Sensada por los sensores LM32_1 y LM35_2 ... 152
Figura 5.39. Temperatura sensada por el medidor de ambiente PeakTech ... 152
Figura 5.40. Medida de temperatura y humedad con el sensor DHT11, ... 153
Figura 5.41. Medida de temperatura con el medidor de ambiente PeakTech ... 153
Figura 5.42. Medida de Humedad Relativa con el medidor de ambiente PeakTech ... 153
Figura 5.43. Iluminación registrada en una oficina con luminaria fluorescente por el sensor GA1A2S100SS ... 158
Figura 5.44. Iluminación registrada en una oficina con luminaria fluorescente por medidor de ambiente ... 158
Lista de Tablas
Tabla 2.1 Registros del sensor CMPS10 en modo I2C, tomado de [29]. ... 41
Tabla 2.2. Comparación de tecnologías inalámbricas ... 45
Tabla 2.3. Comparación dispositivos familia XBee ... 46
Tabla 2.4. Características de los XBee seleccionados ... 46
Tabla 2.5.Características de los microcontroladores usados en las principales motas del mercado. ... 47
Tabla 2.6 Características del Timer FF y UDB ... 52
Tabla 2.7 Variables necesarias para la lectura del sensor CMPS10 usando protocolo I2C. 62 Tabla 2.8. Voltaje de salida medido de 20cm a 119cm en el sensor de distancia. D(distancia), Vout (Voltaje a la salida del sensor) ... 67
Tabla 2.9. Números de identificación transmitidos para cada sensor durante el modo de trabajo. ... 81
Tabla 2.10. Estructura de la trama transmitida en modo de trabajo. ... 81
Tabla 3.1 Estado del arte antenas WSN ... 95
Tabla 3.2. Estado del arte antenas doble resonancia ... 96
Tabla 3.3. Estado del arte antenas XBee ... 97
Tabla 3.4. Bandas de frecuencias del espectro radioeléctrico ... 98
Tabla 3.5. Cuadro de atribución de frecuencias para 902-928MHz ... 98
Tabla 3.6. Cuadro de atribución de frecuencias para 2.4-2.835GHz... 99
Tabla 3.7 Banda de 900 MHz vs 2.4 GHz ... 101
Tabla 3.8. Valores calculados diseño SPA ... 103
Tabla 3.9. Resultado simulaciones antena SPA diseño calculado ... 103
Tabla 3.10. Dimensiones antena fabricada SPA... 104
Tabla 3.11 σ vs τ según la ganancia promedio para log-periódica de dipolos agrupados [50] ... 106
Tabla 3.12 Valores calculados del diseño de la antena log-periódica ... 108
Tabla 3.13 Dimensiones calculadas para log-periódica de dipolos ... 108
Tabla 3.14 Resultados simulación S11 log-periódica diseñada ... 108
Tabla 3.15 Dimensiones de antena final ... 109
Tabla 3.16 Características eléctricas de los sustratos ... 110
Tabla 3.17 Resultados simulación con diferentes sustratos ... 111
Tabla 3.18 Dimensiones antena SPA con ranuras ... 112
Tabla 3.19 Resultados simulación SPA con ranuras ... 112
Tabla 3.20 Resultados simulación antena log-periódica ... 115
Tabla 4.1. Señal de control SPDT ... 121
Tabla 5.1 Resultados medición vs simulación antena log-periódica ... 130
Tabla 5.2 Datos de ganancia log-periódica ... 133
Tabla 5.3 Resultados medición vs simulación antena SPA ... 135
Tabla 5.4 Datos de ganancia antena SPA ... 138
Tabla 5.5 Coordenadas geográficas en tabio de las pruebas XBee ... 140
Tabla 5.6 Alcance de los XBee en tabio con diferentes antenas ... 141
Tabla 5.7 Coordenadas geográficas en ALO de las pruebas XBee ... 141
Tabla 5.8 Alcance de los XBee en ALO para diferentes antenas ... 142
Tabla 5.9. Consumo de corriente del nodo con frecuencia de trabajo de 2,4GHz ... 146
Tabla 5.10. Consumo de corriente del nodo con doble frecuencia de trabajo ... 146
Tabla 5.11. Resultados de la prueba de medición de orientación magnética del sensor CMPS10 ... 154
Tabla 5.12. Resultados de la prueba de medición de inclinación del sensor CMPS10 ... 154
Tabla 5.13 Pruebas de detección de movimiento con el sensor ... 155
Tabla 5.14. Pruebas de medición de distancia del sensor GP2Y0A02YK Parte 1 ... 156
Tabla 5.15 Pruebas de medición de distancia del sensor HC-SR04 ... 157
Tabla 5.16. Comparación de iluminación medida con el sensor GA1A2S100SS y el medidor de ambiente PeakTech ... 157
Tabla 5.17. Comparación de las motas comerciales con las desarrolladas. ... 159
Tabla 6.1 Presupuesto UDMOTE ... 164
Tabla 6.2 Presupuesto UDMOTESPA ... 164
Tabla 6.3 Costo sensores comunes ... 165
Capítulo 1
19
1.1
INTRODUCCIÓN
En los últimos años, el uso de la tecnología ha aumentado exponencialmente buscando contribuir a las labores del diario vivir. Esto ha causado que cada vez se realicen investigaciones y desarrollos con el fin de obtener dispositivos con mejores prestaciones, menores tamaños y a menores costos, los cuales puedan incluirse en diferentes aspectos y entornos donde interactúa el ser humano.
Una de las tecnologías que empieza a cobrar auge son las redes de sensores inalámbricas o WSN, por sus siglas en inglés (Wireless Sensor Network), las cuales han contribuido a que el ser humano pueda monitorear, controlar e interactuar con diferentes entornos de forma remota, a diferencia de las redes cableadas, estas redes proporcionan mayor versatilidad al permitir realizar enlaces a través de una interfaz radio eléctrica.
A pesar de las ventajas que presentan las redes inalámbricas sobre las cableadas, existe una serie de aspectos adicionales que se deberán tener en cuenta para evaluar el desempeño de dicha red, entre estos aspectos están los alcances, el consumo energético de los nodos, la frecuencia de transmisión y la tasa de bits que se transmite. Estos aspectos deberán ser seleccionados con gran cuidado dependiendo del entorno de la aplicación, los cuales pueden ser agricultura, robótica, domótica, medicina, industria, entre otras.
El alcance es determinado principalmente por la ganancia de la antena y por el diagrama de radiación utilizado. Este diagrama de radiación se establece con el uso de un tipo de antena determinado, para WSN generalmente se usan antenas de tipo monopolo que producen diagramas de radiación omnidireccionales y que poseen ganancias pequeñas.
20
1.2
FORMULACIÓN DEL PROBLEMA
En los últimos años se ha presentado un auge en el concepto de "Smart-Cities" y ha cobrado interés la investigación en redes de sensores inalámbricas que le aporten al desarrollo de este ámbito. Las redes de sensores inalámbricas permiten el monitoreo y el control de diferentes entornos, ofreciendo soluciones para aplicaciones en áreas de la industria, la medicina, la automatización, la domótica, el tráfico, el sector agrícola, etc. La unidad fundamental de estas redes es el nodo de sensado inalámbrico, también conocido como mota. En el diseño de estos es importante tener en cuenta el costo, el consumo energético, el alcance, la flexibilidad y el tamaño.
En el mercado electrónico actual se disponen de motas, que tienen como elemento radiante antenas de tipo monopolo y dipolo. Estas antenas con respecto a las antenas planas tienen menores prestaciones en términos de ganancia y directividad, los cuales son aspectos que potencialmente pueden incidir directamente en el alcance, consumo de potencia, entornos de aplicación y en general en las prestaciones de la red de sensores inalámbrica.
Con base en las anteriores premisas se plantea la siguiente pregunta de investigación ¿El uso de sistemas radiantes planos en nodos de sensado inalámbrico mejora las capacidades operativas y de conectividad en un entorno de red de sensores?
En el diseño del nodo de sensado inalámbrico, se plantean como variables de cuantificación de desempeño las siguientes características: alcance, consumo energético, tamaño del dispositivo, cantidad de sensores y costo. Dado que el proyecto propone mejorar las capacidades de transmisión de un sistema radiante tipo monopolo, se requiere del diseño de una antena de alta ganancia que permita conseguir largos alcances de transmisión, adicionalmente se busca que el prototipo final tenga un consumo energético bajo, sea de tamaño reducido, posea variedad en los sensores y tenga un precio asequible.
1.3
JUSTIFICACIÓN
21
presenta diversos obstáculos físicos impidiendo el establecimiento de un enlace de grandes distancias y donde existen una gran gama de dispositivos irradiando a diferentes frecuencias.
Para mejorarlas características de transmisión de un nodo de sensado inalámbrico, se propone la implementación de una antena plana usando tecnología microstrip, ya que esta contribuye a mejorar los alcances en la red inalámbrica de sensores al tener una mayor ganancia y directividad y adicionalmente presenta una reducción del espacio ocupado al ser compacta y de menor tamaño.
Dada la baja disponibilidad comercial de nodos de sensado inalámbrico con antenas planas se precisa realizar un proyecto que incluya este tipo de tecnología, por lo tanto se propone el diseño de un nodo de sensado inalámbrico desde su base, orientados en obtener una implementación de bajo costo. Al diseñarlo desde su inicio se obtienen ventajas como tener un sistema flexible, el cual permite el cambio de parámetros según la aplicación, además, es posible escoger el hardware y los componentes que cumplan con los requerimientos a un menor costo, puesto que las soluciones comerciales son de costos altos e imponen barreras para realizar cambios específicos.
1.4
OBJETIVOS
1.4.1
Objetivo General
Diseñar e implementar un nodo de sensado inalámbrico usando elementos radiantes planos con ganancia superior a la de un monopolo.
1.4.2
Objetivos Específicos
Determinar los requerimientos de hardware para la implementación del nodo inalámbrico de sensado.
Determinar la geometría, características del diagrama de radiación, ganancia y ancho de banda de impedancia del elemento radiante que faciliten su incorporación y correcta operación en nodos de sensores inalámbricos.
Diseñar y caracterizar un sistema radiante plano acorde a los requisitos de conectividad de redes de sensores inalámbricos.
22
1.5
ALCANCE Y LIMITACIONES
1.5.1
Alcance
El alcance del proyecto radica en el diseño y en la implementación de un nodo de sensado inalámbrico con elementos radiantes planos. Este proyecto pretende dar como resultado la integración de los elementos que componen una mota y la incorporación de la antena a la misma, la cual proporcionara una mayor ganancia que la antena tipo monopolo y permitirá alcanzar mayores distancias de transmisión. Este nodo debe cumplir con los requisitos de conectividad en una red de sensores inalámbrica.
1.5.2
Limitaciones
Capítulo 2.
24
2.1
RED DE SENSORES INALÁMBRICA
2.1.1
Definición
Las redes de sensores inalámbricas (WSN) consisten en un conjunto de nodos que se organiza en una red cooperativa para la adquisición y distribución de datos, monitoreados y controlados por un centro de gestión [1]. Este tipo de redes son cada vez más populares en aplicaciones industriales y de automatización del hogar
Una red inalámbrica de sensores consta de tres componentes principales: nodos, gateways o concentradores y software. Los nodos de medida distribuidos de forma espacial establecen la interfaz con sensores para monitorear el equipo o el entorno. Los datos adquiridos son transmitidos de manera inalámbrica al concentrador, el cual puede operar independientemente o conectarse a un sistema principal donde se puede reunir, procesar, analizar y presentar los datos de medida usando software y se puede configurar a un bajo costo, baja potencia y baja transferencia de datos en un área particular.
Figura 2.1. Componentes Generales de una Red WSN, tomada de [2]
WSN permite la monitorización remota y la recolección de datos a partir de las condiciones físicas o ambientales, lo que permite ser utilizado en aplicaciones tales como el control del tráfico, control industrial, el monitoreo de la salud, domótica, la gestión de desastres y muchos otros. WSN es construido mediante la conexión de un grupo de nodos entre sí para llevar a cabo tareas requeridas, estos nodos cooperan y automáticamente crean una red entre ellos. El nodo sensor inalámbrico más común, es el conocido comúnmente como mota [3].
25
físicas, del procesamiento de los datos medidos y del envío de los datos a un dispositivo específico de forma inalámbrica [4].
Las funciones deseables para los nodos de sensores en una WSN incluyen: la facilidad de instalación, la auto-identificación, el auto-diagnóstico, la fiabilidad, la conciencia de tiempo para la coordinación con otros nodos, algunas funciones del software y DSP, y los protocolos de control estándar y de las interfaces de red.
En los últimos años se ha visto el incremento en el despliegue de las redes de sensores inalámbricas, se estima un auge en el desarrollo de aplicaciones en las industrias de automatización y demótica a partir de la convergencia entre redes de sensores e internet danto paso a un nuevo paradigma llamado “El internet de las Cosas” [5].
2.1.2
Estructura de red de una WSN
Una red WSN puede implementarse bajo diferentes estructuras de red, dependiendo de la capacidad de concentración y transmisión de información, la interoperabilidad entre nodos, las características de tráfico del canal disponible para la comunicación, la seguridad de la información; entre otros. Todos estos parámetros conllevan a implementar redes con estructuras de estrella, árbol o malla, como las mostradas respectivamente en la Figura 2.2.
Figura 2.2. Topologías de red de una WSN, tomada de [2]
Red Estrella
Las redes en las cuales existe únicamente una comunicación directa entre el concentrador y cada uno de los nodos sensores se conocen como redes estrella. Dentro de las ventajas de esta red se encuentran su fácil desarrollo, baja latencia y el rápido despliegue y montaje, mientras en las desventajas se encuentran la posibilidad de colisión de paquetes y la dificultad de ubicación del concentrador para conseguir comunicación directa con cada nodo, teniendo como consecuencia la imposibilidad de generación de una red amplia geográficamente.
Red Árbol
26
esta red se encuentra el incremento del costo de implementación por el uso de nodos repetidores, la dependencia de algoritmos de enrutamiento y la posibilidad de pérdida de comunicación de varios nodos ante la pérdida o fallo de un nodo repetidor.
Red en malla
Las redes en que los nodos de sensado sirven a su vez como repetidores para conseguir comunicar un nodo apartado con el concentrador se denominan redes en malla. En este tipo de redes, cuando un nodo quiere comunicarse con el concentrador, lo puede hacer directamente si el alcance del radio lo permite, o puede comunicarse con sus nodos vecinos y estos servirán de repetidores para llevar la información a su destino.
Este tipo de red es considerada muy versátil en cuanto a la topología de red, debido a que si un nodo se ve afectado y sufre algún daño que impida su funcionamiento, los nodos vecinos que lo utilizaban a e de repetidor, podrán tomar otras rutas para comunicarse con el nodo central. Sin embargo este tipo de redes presenta amplias dificultades respecto a tiempos de latencia y elevada probabilidad de colisión de paquetes.
Nodo de sensado o Mota
Los nodos de sensores inalámbricos conocidos como motas son la unidad fundamental en la formación de redes de sensores inalámbricos. Una mota tiene la capacidad de ser incrustada en diferentes tipos de entornos. El nodo sensor inalámbrico por lo general consiste en sensores o actuadores que tienen la capacidad de procesamiento y en ocasiones memoria. El nodo tiene una frecuencia de radio, un transceptor y su propia fuente de energía [4], esta estructura general puede verse representada en bloques por la Figura 2.3.
Figura 2.3. Diagrama de bloques general de una MOTA, tomada de [2].
Una distinción clara entre motas puede verse en la potencia de procesamiento. En una categoría hay motas que están diseñadas con una potencia computacional relativa siendo una solución integrada y en la otra categoría, las motas sacrifican potencia de procesamiento a favor del bajo consumo de energía y de la larga vida útil, mientras que se sacrifica la reducida memoria de programa y la interconexión limitada [6].
27
2.2
ESTADO DEL ARTE
2.2.1
Trabajos e investigaciones similares
Actualmente existe una tendencia de incluir sensores en la mayoría de dispositivos que nos rodean, brindando diferentes ventajas como el control programado y a distancia, seguridad, confort y otros beneficios, a esto se le llama "el internet de las cosas", lo cual también ha empezado a generar el concepto de las "Smart-Cities", y con ello se han llevado a cabo diferentes estudios como[8], [9],[10] y [11] que hablan de las ventajas y desventajas de incluir y generar estas redes de sensores locales y mundiales, y plantean diferentes maneras de realizarlo. También existen algunos estudios como [12] que hablan del porqué esta tecnología ha estado relativamente retrasada, si se compara por ejemplo con la capacidad de guardar archivos en la nube y verlos desde cualquier parte del mundo o con la posibilidad de realizar video-llamadas, dando como principal justificación la falta de accesibilidad económica.
Existe una gran cantidad de artículos y trabajos de grado que hablan sobre la creación de motas y sus diversas aplicaciones, como por ejemplo en mediciones de temperatura, humedad y otros aspectos para el sector agropecuario como en [13] y en [14]. También se han realizado trabajos y desarrollos con redes punto a punto, donde se le da relevancia al envío de comandos de manera inalámbrica para el control de diferentes dispositivos, como por ejemplo robots [15].
Uno de los factores más importantes para mejorar el rendimiento de una mota, radica en establecer un tipo de antena adecuado, lo cual puede contribuir a mejorar el consumo energético, los alcances en los enlaces establecidos en la red inalámbrica, el tamaño ocupado por la antena y el costo de fabricación como se estudia en [16] donde se propone y simula el uso de antenas inteligentes para remplazar las antenas de omnidireccionales, consiguiendo mejorar en 50% la eficiencia y el consumo energético.
28
2.2.2
Mercado
Actualmente existen muchos tipos de motas que ofrecen diferentes empresas, tanto para el ámbito académico, como para la industria. Estas motas están diferenciadas unas entre otras por diferentes aspectos como el nivel de consumo energético, velocidades de procesamiento, cantidad de entradas, tamaños, entre otros, lo cual puede brindar una gran diversidad a un comprador dependiendo de su área de interés.
A continuación se muestran las más populares, con sus diferentes características ofrecidas por diferentes compañías, destacando el tipo de antena que se utiliza, los alcances y el consumo de energía.
Libelium
1. Waspmote
Figura 2.4.Waspmote, tomado de [21]
Microcontrolador Atmel ATmega 1281
Compatible con 11 tecnologías de radio transmisión, entre ellas Zigbee, WiFi, bluetooth y 3G. Dependiendo de la tecnología de radio usada, se utilizan antenas de tipo monopolo de diferentes ganancias, 2 y 5dBi para Zigbee, WiFi y Bluetooth.
Alcances de 700m para transmisión con XBee-802.15.4 -Pro, 10Km para XBee-900 y 100m para Bluetooth Low Energy (BLE) 4.0 y WiFi, con antenas de 2dBi.
Consumo de 15mA encendido, 55uA en estado de sueño y 0,7uA en hibernación, sin incluir el consumo de transmisión.
29 Olimex
1. XBee IO Pro
Figura 2.5. XBee IO Pro, tomado de [22]
Microcontrolador ATMEGA328
Transmisión a través de XBee serie 1 o serie 2,
Alcances de 100 m (XBee serie 1) y 120 m (XBee serie 2), en línea de vista y utilizando antenas de tipo monopolo y de tipo PCB para ambos casos.
Consumo de transmisión de 45mA (XBee Serie 1) y 40mA (XBee serie 2). 4 salidas con relés de 10A
6 entradas analógicas Alimentación 9-30V
Programado mediante Software Arduino
Memsic
1. Mica2
Figura 2.6. Mica2, tomado de [23]
Microcontrolador ATMEGA 128L
Transmisión en protocolo 802.15.4 a 868 MHz y 916 MHz
Alcance de 500 ft ( 150m aprox.) en línea de vista para transmisión a 868MHz y 916MHz con antena tipo dipolo de 1/4 de onda.
Consumo de energía: 8mA en modo activo y <15uA en estado de sueño 51 pines disponibles
30
Figura 2.7. MicaZ, tomado de [23]
Microcontrolador ATMEGA 128
Transmisión en protocolo 802.15.4 sobre frecuencia de 2.4GHz con transceptor de radio CC2420
Alcance de 75m a 100m en línea de vista con antena dipolo de media onda. Consumo de energía: 8mA en modo activo y menor a 15uA en modo
dormido
Tasa de transmisión de 250Kbps 51 pines disponibles
3. Lotus
Figura 2.8. Lotus, tomado de [23]
Microcontrolador LPC1758 Cortex M3 de 32 bits Protocolo de transmisión 802.15.4 a 2.4GHz
Alcance de 100m en línea de vista con la antena integrada (on-board) y conector SMA para conexión de antena externa.
31
4. IRIS
Figura 2.9. Iris, tomado de [23]
Microcontrolador ATmega1281
Protocolo de transmisión 802.15.4 a 2.4GHz
Alcance de 300m en línea de vista con antena dipolo de cuarto de onda. Consumo de energía: 8mA en modo activo y 8uA en modo dormido Tasa de transmisión de 250Kbps
51 pines disponibles
Crossbow
1. IMOTE2
Figura 2.10. Imote2, tomado de [24]
Diseñado por Intel y adquirido por Crossbow Microcontrolador ARM core Intel PXA271
Protocolo de comunicación 802.15.4 a frecuencia de 2.4GHz con transceptor de radio CC2420 IEEE 802.15.4.
Alcance de 30m en línea de vista con antena de montaje superficial, incluido en el módulo, también tiene disponible un conector SMA.
32 Texas Instrument
1. eZ430-RF2500
Figura 2.11 Kit eZ430-RF2500, tomado de [25]
Microcontrolador TI MSP430F2274
Radio Transceptor CC2500 en banda de 2,4GHz
Ultra bajo consumo de energía: 270μA en estado activo, 0,7μA en estado de sueño.
Soporta una tasa máxima de transmisión de 250kbps.
Soporta solamente 3 sensores. Temperatura, humedad y Luz.
2.3
DESARROLLO DEL SISTEMA EMBEBIDO
2.3.1
Consideraciones
El diseño del sistema embebido del nodo de sensado se rige por los objetivos y alcances propuesto en el presente trabajo, además de la intención de implementar nuevas tecnologías, que permitan un desarrollo más versátil e interesante en aspectos académicos y comerciales.
Debido a que se pretende diseñar un nodo de sensado que sea adaptable a diferentes plataformas y diferentes ambientes de implementación, se requiere seleccionar elementos de hardware de uso común en la industria y la academia, que sean fácilmente adquiribles, cuyos voltajes de alimentación sean fácilmente implementables y con protocolos de comunicación altamente comprensibles.
Se pretende en términos de desarrollo, utilizar una gama amplia y común de sensores, un tipo de procesamiento que permita desarrollo con dichos sensores y que permita una fácil escalabilidad para la inclusión futura de otros sensores y la utilización de radios compatibles con los existentes en el mercado.
33
2.3.2
Sensores
2.3.2.1 Consideraciones de selección de los sensores
El uso frecuente de los nodos de sensado en diferentes espacios y ambientes hace necesaria la selección de sensores particulares para cada aplicación, encontrando motas compatibles con sensores de gases, presencia de radioactividad, campos magnéticos, entre otros. Sin embargo, entre las tantas aplicaciones existen una gran cantidad de sensores comunes que son válidos para muchas de ellas, permitiendo seleccionar a partir de dicha información, un grupo de sensores que pueden ser utilizados en diferentes sistemas de monitoreo.
Para la selección de los sensores, se estudiaron los campos habituales de uso de las redes WSN y se discriminaron los sensores típicos en cada una de ellos, obteniendo los resultados mostrados a continuación.
Seguridad. (Detección de intrusos y seguridad de perímetros) Sensor de presencia y movimiento.
Sensor de interrupción de perímetro. Sensores de presión.
Sensores magnéticos para control de apertura de puertas y ventanas. Cámaras de seguridad.
Sensores de metales. Sensores RFID.
Seguridad. (Eventualidades catastróficas o accidentales) Sensor de humo.
Sensor de gas.
Sensor de presencia y movimiento Sensor de inundación
Sensor de temperatura Sensor de humedad relativa.
Medio Ambiente
Sensor de humedad relativa Sensor de temperatura Sensor de oxígeno
Sensor de actividad sísmica. Sensor de fuego.
Sensor de presencia y movimiento. Sensor de calidad de aire.
Sensor de calidad de agua.
Sensor de luminosidad y radiación Solar. Sensor de distancia.
Sensor de dirección de viento.
Industria
Sensor de temperatura Sensor de humedad relativa Sensor de distancia
34 Sensor de corriente.
Sensor de potencia. Sensor de inclinación. Sensor de presión. Sensor de movimiento Sensor de luminosidad. Sensor de peso.
Sensor de caudal.
Medicina
Sensor de pulsaciones Sensor de presión Sensor de movimiento. Sensor de calidad de aire Sensor de temperatura Sensor de humedad relativa. Sensor de gases
Sensor de oxígeno Sensores de PH.
Tráfico
Sensor de distancia
Sensor de movimiento
Cámaras de seguridad. Sensores de presión Sensor de velocidad. Sensor de lluvia Sensor de temperatura.
Domótica
Sensor de presencia y movimiento Sensor de temperatura
35
De acuerdo a la anterior lista, se deciden seleccionar los siguientes sensores, de acuerdo a su uso común en los diferentes campos.
Sensor de temperatura Sensor de humedad relativa Sensor de distancia
Sensor de inclinación. Brújula electrónica. Sensor de luminosidad Sensor de movimiento.
2.3.2.2 Sensores seleccionados.
A partir de la selección de los tipos de sensores, se escogen algunas de las referencias más utilizadas en el mercado, además de ser parte de las referencias mas económicas, para dar satisfacción a la medición de las variables elegidas.
A continuación se muestran las referencias seleccionadas, junto con los datos relevantes para el presente trabajo suministrados por el fabricante. Se observan las diferentes curvas de funcionamiento, voltajes de operación, protocolos de comunicación entre otros.
Sensor de temperatura LM35 [26]
Figura 2.12. Sensor LM35, tomado de [26].
Especificaciones:
Voltaje de alimentación: 4V a 30V. Variable medida: Temperatura en Celsius. Rango de medición: -55°C a 150°C Precisión: 0.5°C
Salida: Voltaje analógico con factor de escala de 10mV/°C Consumo de corriente: Inferior a 60μA.
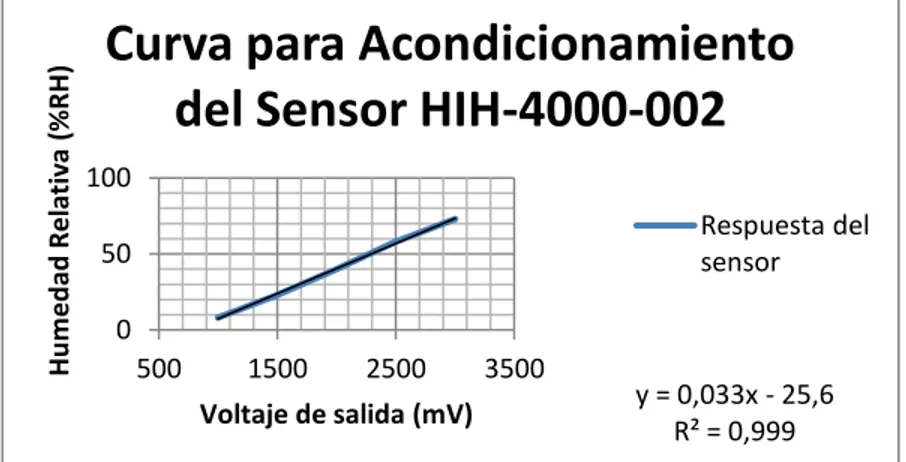
36 Sensor de Humedad Relativa HIH-4000-002 [27].
Figura 2.13. Sensor HIH-4000-002, tomado de [27]
Especificaciones:
Voltaje de alimentación: 4V a 5.8V. Variable medida: Humedad relativa. Rango de medición: 0%RH a 100%RH Precisión: 3.5%RH
Salida: Voltaje analógico regido por la expresión
Figura 2.14. Curva de respuesta del Sensor HIH-4000-002, tomado de [27].
37
Sensor de humedad relativa y temperatura DTH11[28].
Figura 2.15. Sensor DHT11, tomado de [28]
Especificaciones:
Voltaje de alimentación: 3.3V a 5V DC. Variable medida:
Humedad Relativa Temperatura en Celsius.
Rango de medición:
Humedad Relativa: 20%-90%
Temperatura: 0°C-50°C
Resolución:
Humedad Relativa: 8 Bits en representación de 1°C Temperatura: 8Bits en representación de 1%RH
Consumo de corriente: Máximo 2.5mA. Lectura Señal de salida.
Protocolo: One Wire.
La lectura del sensor se debe realizar a través de un protocolo One Wire, donde es necesario enviar un parámetro de inicialización al sensor y esperar la respuesta de éste, a través del mismo puerto, el cual consta de un único conductor.
La respuesta del sensor consta de una trama de 40 bits, distribuida de la siguiente manera: 40 bits = 8 bits (Parte entera humedad relativa) + 8 bits ( Parte decimal humedad relativa ) + 8 bits ( temperatura ) + 8 bits (Check Sum).
38
Los 8 bits designados a la parte decimal de la humedad relativa, no están disponibles para esta versión del sensor. Con lo cual se envían 8 ceros en su lugar.
Inicialización y solicitud de lectura:
Para solicitar al sensor una respuesta sobre las variables a medir, es necesario escribir en el puerto one wire de la siguiente manera.
Se deberá escribir y mantener un nivel de 0 voltios durante un lapso de 18ms y posterior a este, llevar el bus a un nivel de vcc; una vez realizada dicha acción, se deberá terminar la escritura del puerto y prepararse para recibir la respuesta del sensor, el cual tardara en responder un lapso entre 20 μs a 40 μs.
Figura 2.16. Inicialización del sensor DHT11, tomado de [28].
Respuesta del sensor:
Una vez el sensor es inicializado, este procederá a enviar una respuesta, la cual comenzara a transmitirse a través del bus one wire entre 20μs y 40μs después de que se haya terminado el requerimiento de lectura.
El inicio de la respuesta del sensor constara de un pulso en nivel 0v por un lapso de 80μs, seguido de un nivel vcc por un lapso de 80μs.
Figura 2.17. Confirmación de inicialización del sensor DHT11, tomado de [28].
Esta respuesta indica únicamente que el sensor ha sido inicializado y que a continuación comenzara la transmisión correspondiente a las variables sensadas para lo que el sensor enviara una trama de 40 bits codificados como se explica a continuación.
Representación de un bit 0.
39
Figura 2.18. Representación de un "0" en el sensor DHT11, tomado de [28].
Representación de un bit 1.
Al igual que en la representación del bit 0, para el bit 1, el sensor mantiene un nivel bajo por 50μs y luego de este, a diferencia del bit 0, pasa a un nivel alto, el que sostiene por un tiempo de 70μs, tal como se muestra en la Figura 2.19.
Figura 2.19. Representación de un "1" en el sensor DHT11, tomado de [28].
Finalización de la transmisión.
Una vez el sensor envía los 40 bits correspondientes a datos, este enviará un nivel bajo por un tiempo de 50μs con el fin de anunciar la finalización de su respuesta y luego de ello liberará el bus one wire para una futura transmisión.
La Figura 2.20 muestra todas las etapas de la transmisión mencionadas anteriormente, pero dando un ejemplo de transmisión de únicamente dos datos, un 0 y un 1.
40
Sensor de inclinación y brújula magnética CMPS10 [29].
Figura 2.21. Sensor CMPS10, tomado de [29]
Especificaciones:
Voltaje de alimentación: 3.6V a 5V DC. Variable medida:
Inclinación en dos ejes. Azimut magnético.
Rango de medición:
Inclinación: -85° a 85°
Azimut magnético: 0° a 359.9°
Resolución:
Inclinación: 8 Bits, saltos de 1°, para cada eje. Azimut: 16 Bits, saltos de 0,1°.
Consumo de corriente: 25mA. Lectura Señal de salida.
El sensor CMPS10 es capaz de entregar la señal medida de tres diferentes maneras: Comunicación I2C, Comunicación Serial y PWM. Para el presente trabajo se seleccionó la lectura del sensor a través del módulo I2C cuya información correspondiente se explica a continuación.
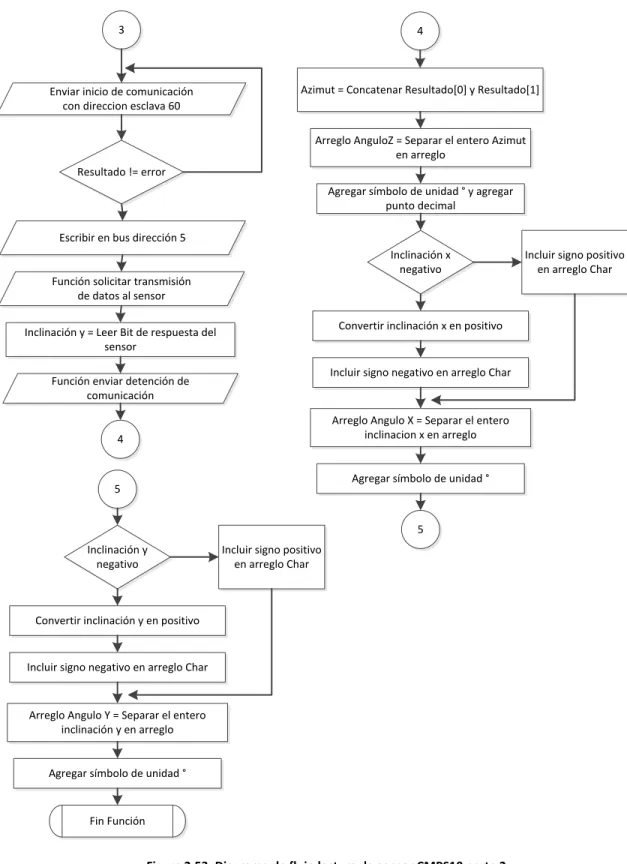
En el modo I2C, el sensor CMPS10 debe conectarse como se muestra en la Figura 2.22.
41
Dentro del modo I2C, el sensor guarda una tabla con 23 registros, en los cuales almacena las diferentes variables sensadas. Dentro de la tabla se resaltan los registros de Azimut o Compas con 16 bits de resolución en los registros numero 2 (registro alto) y 3 (registro bajo), y los registros 4 y 5 donde se almacena la inclinación en el eje x y eje y del sensor. La tabla con los 23 registros es suministrada por el fabricante y mostrada en la Tabla 2.1 Registros del sensor CMPS10 en modo I2C. Estos registros deben ser leídos a través de instrucciones I2C, para conocer el estado de las variables medidas.
Tabla 2.1 Registros del sensor CMPS10 en modo I2C, tomado de [29].
Sensor de movimiento [30].
Figura 2.23. Sensor de movimiento, tomado de [30]
Especificaciones:
Voltaje de alimentación: 3V a 6V.
Variable medida: Detección de movimiento.
Rango de medición: Movimiento hasta 7 metros de distancia. Consumo de corriente: 12mA a 3V, 25mA a 5V.
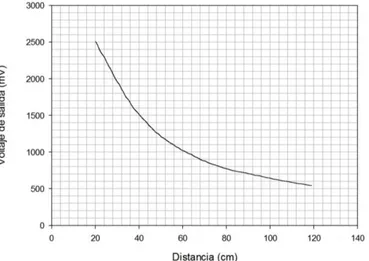
42 Sensor de distancia infrarrojo GP2Y0A02YK [31]
Figura 2.24. Sensor de distancia por luz infrarroja GP2Y0A02YK, tomado de [31]
Especificaciones:
Voltaje de alimentación: 4.5V a 5.5V. Variable medida: Distancia
Rango de medición: 20cm a 150cm Resolución: Rango continuo. Precisión: ±10cm
Salida: Voltaje continuo no lineal, de acuerdo a la curva característica mostrada en la Figura 2.25.
Figura 2.25. Curva característica del sensor GP2Y0A02YK, tomado de [31].
Consumo de corriente: 33mA.
43 Sensor de distancia por ultrasonido HC-SR04 [32].
Figura 2.26. Sensor HC-SR04, tomado de [32]
Especificaciones:
Voltaje de alimentación: 4V a 5V. Variable medida: Distancia. Rango de medición: 2cm a 400cm. Resolución: 0.3cm.
Salida: Pulso en alto con duración de tiempo linealmente proporcional a la distancia medida.
Consumo de corriente: 15mA. Lectura Señal de salida
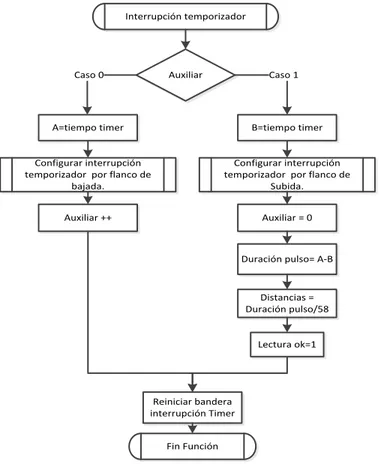
El sensor de distancia HC-SR04 es un sensor que actúa bajo solicitud, requiriendo un proceso de iniciación para comenzar el proceso de lectura. Para iniciar el sensor, se requiere de enviar un pulso en nivel alto por un periodo de 10μS al pin denominado por el fabricante como trigger. Una vez inicializado el sensor, este envía 8 pulsos sonoros hacia el objetivo al que se encuentra apuntando y de acuerdo al eco producido por estos pulsos, realiza un cálculo de la distancia medida, la cual representa posteriormente por un pulso en alto enviado por el pin denominado Echo.
El proceso de inicialización, envió de pulsos sonoros y señal de salida, se muestran en la Figura 2.27. Proceso de lectura del sensor HC-SR04
44
Para calcular la distancia en centímetros medida por el sensor es necesario tomar la duración en alto del pulso recibido desde el pin Echo en microsegundos y dividir este valor en 58, como se muestra en (2.1)
(2.1)
Sensor de luz ambiente GA1A2S100SS [33]
Figura 2.28. Sensor GA1A2S100SS, tomado de [33].
Especificaciones:
Voltaje de alimentación: 2.7V a 7V.
Variable medida: Nivel de iluminación en lux (lx) Rango de medición: 10lx a 10000lx
Resolución: Escala continua.
Salida: Nivel de corriente representado por la curva de la Figura 2.29. Curva de respuesta del sensor GA1A2S100SS, tomado de .
Figura 2.29. Curva de respuesta del sensor GA1A2S100SS, tomado de [33].
Consumo de corriente: 500μA.
45
2.3.3
Sistema de radios
El sistema de radios del nodo de sensado permite modular la señal a la salida la unidad de procesamiento y transmitirla a través de grandes distancias, utilizando el aire como medio de transmisión. Este sistema o bloque dentro del nodo es el que permite comunicarse con el nodo central o con nodos vecinos para difundir la información sensada, para ello existen diversos tipos de radios y protocolos que permiten transmitir la información con diferentes topologías, consumos energéticos, alcances y demás, como se explica a continuación.
2.3.3.1 Tecnologías Inalámbricas
En comunicaciones inalámbricas se han desarrollado diversas tecnologías entre ellas Bluetooth, WiFi y ZigBee como las más usadas. Cada una de ellas permite transmitir datos vía inalámbrica y presentan características que las diferencian entre si tales como: alcance, velocidad, robustez y precio. En la Tabla 2.2 se encuentra una comparación de las características básicas de las tecnologías inalámbricas [34].
Tabla 2.2. Comparación de tecnologías inalámbricas
Aspecto ZigBee Bluetooth WiFi
Alcance nominal 10m-1000m 10m 10-100m
Bandas de frecuencia 868MHz, 900MHz, 2.4GHz 2.4GHz 2.4GHz, 5GHz
Consumo de potencia Bajo Medio Alto
Topologías Ad-hoc, estrella y mesh Ad-hoc y estrella Ad-hoc y estrella
Máx. tasa de transmisión 250Kbps 720Kbps 54Mbps
Protocolo 802.15.4 802.15.1 802.11
Tipo de red WPAN WPAN WLAN
Modulación BPSK, O-QPSK GFSK PSK, QPSK, OFDM
Aplicación Redes de sensores Transferencia
multimedia móviles Internet
Capacidad máx. de nodos 65000 8 2007
Ancho de banda del canal 0.3/0.6MHz; 2MHz 1 MHz 20 MHz
Para la selección de radio se elige el protocolo ZigBee, de acuerdo con los parámetros mencionados en la Tabla 2.2, pensando también en que la aplicación corresponde a una red WSN, donde se busca un bajo consumo de energía, una baja transferencia de datos y un buen alcance, aspectos cumplidos con mejor desempeño por dicho protocolo.
2.3.3.2 Dispositivos XBee
46
Tabla 2.3. Comparación dispositivos familia XBee
Para seleccionar los XBees adecuados para el desarrollo del proyecto se tiene en cuenta que cumpla los siguientes parámetros: topología punto a multipunto, bajo consumo de potencia y largo alcance. Teniendo en cuenta la Tabla 2.3 y los parámetros mencionados anteriormente, se selecciona el XBee-pro XSC y el XBee-pro 802.15.4 de digi international con antena externa de conector RPSMA, las características principales de dichos radios se muestran en la Tabla 2.4, [36] y [37].
Tabla 2.4. Características de los XBee seleccionados
Aspecto XBee-PRO Multipoint RF-Modules XBee-PRO XSC
Banda de frecuencia 2.4- 2.4835 GHz 902-928 MHz
Procesador MC13193 Transceiver Freescale HCS08 689S08A
ADF7023 transceiver, Cortex M-3 EFM32G230 Tasa de datos 250 Kbps 10 Kbps o 20 Kbps
Alcance urbano 90 m 610 m
Alcance línea de vista 1.6 Km 14 Km con antena dipolo 45 Km con antena alta ganancia Potencia de transmisión 63 mW (18 dBm) 250 mW (24dBm)
Sensibilidad de recepción -100 dBm -109 dBm con baud 9600 -107 dBm con baud 19200 Temperatura de operación -40°C hasta 85°C -40°C hasta 85°C
Voltaje de alimentación 2.8- 3.4 VDC 2.4 – 3.6 VDC Corriente de transmisión 250 mA 215 mA
Corriente de recepción 55 mA 26 mA
Corriente modo sleep 10 A 2.5 A
Topología Protocolo Producto Frecuencia Hardware
Alcance linea de vista RF Data Rate Potencia Tx [dBm] Sensibilidad Rx [dBm] Consumo Corriente Tx/Rx [mA]
802.11 Xbee Wifi S6B N/A 1 a 72 Mbps 16 -93 a -71 309/100
Xbee 802.15.4 S1 90 m 0 -92 45/50
S1 1.6 Km 18 -100
S1 1 Km 10 -100
Xbee- PRO
XSC 900 MHz S3B 14.5 Km 10 o 20 Kbps 24 -107 a -109 215/26 Xbee- PRO
868 868 MHz S5 40 Km 24 Kbps 25 -112 500/65
Xbee ZB SMT S2C 1.2 Km 8 -102 45/28
Xbee PRO ZB
SMT S2C 3.2 Km 18 -101 100/31
Xbee ZB S2C 120 m 3 -96 N/A
S2B 3.2 Km 18 -102
S2B 1.5 Km 10 -102
Xbee PRO 900
HP 900 MHz S3B 14.5 Km
10 o 200
Kbps 24 -101 a -110 215/29
Xbee 865/868 LP
865MHz o
868MHz S8 4 Km 10 o 80 Kbps 12 -101 a -106 48/27
Xbee
DigiMesh 2.4 S1 90 m 0 -92 45/50
S1 1.6 Km 18 -100 250/55
S1 1 Km 10 -100 150/55
250 Kbps 250 Kbps Mesh Zigbee-PRO Feature set Propietario Digimesh
Xbee PRO ZB
Comparación de las Características de la Familia Xbee
802.15.4 2.4 GHz
47
2.3.4
Unidad de procesamiento
La unidad de procesamiento lógico dentro del nodo de sensado inalámbrico, es aquel componente o conjunto de componentes electrónicos que se encargan de leer, interpretar y computar la señal de salida de los sensores. Generalmente es usado un microcontrolador para la ejecución de estas tareas.
2.3.4.1 Micro controladores usados en WSN
El microcontrolador tiene la capacidad de convertir las señales analógicas de los sensores de este tipo, en variables digitales, además puede leer directamente señales de otros sensores digitales que pueden usar diversos tipos de comunicación para el envió de la señal sensada. Generalmente en una WSN, el microcontrolador utilizara la información recibida para guardarla en memorias o para enviarla al nodo central.
Las características básicas del microcontrolador son regidas por el campo de aplicación en que se encuentra y por los sensores que este maneja, además de otros criterios de selección propios de cada fabricante. En la Tabla 2.5 se muestran las características relevantes de los microcontroladores usados en algunas de las motas más populares del mercado, características tomadas de [38], [39] y [40] .
Tabla 2.5.Características de los microcontroladores usados en las principales motas del mercado.
MOTA WASPMOTE, IRIS
XBee IO Pro V2
Mica2,
MICAz LOTUS TELOSB
eZ430-RF2500 Procesador/ Micro-controlador Atmel ATmega 1281 Arduino Leonardo (Basado en el ATmega32u4 ) ATMEGA 128L, ATMEGA 128 LPC1758 Cortex M3 de
32 bits
TI MSP430F1611
TI MSP430F2274
CPU 8 bits 8 bits 8 bits 32 bits 16 Bits 16 Bits
Memoria Flash 128 Kbytes 32 Kbytes 128 Kbytes 512 Kbytes 48 Kbytes 32Kbytes
SRam 8 Kbytes 2.5 Kbytes 4 Kbytes 64 Kbytes 10 Kbytes 1 Kbytes
Máxima frecuencia de
operación
16 MHz 16 MHz 16 MHz 100 MHz 8 MHz 16 MHz
Pines I/O 54 26 53 52 48 32
ADC Canales/ Resolución/ Vel
Muestreo
8 Canales/ 10 bits / 15Ksps
12 Canales/ 10 Bits/ 15Ksps
8 Canales/ 10 bits / 15Ksps
6 Canales/ 12 Bits/ --
8 Canales/ 12Bits/ --
12 Canales/ 10 Bits/ --
Timers 6 4 4 4 2 2
Voltaje
operación 2.7V - 5.5V 2.7V - 5.5V 2.7V - 5.5V 3.3V 1.8V - 3.6V 1.8V - 3.6V UART 2 1 2 4 2 1
48
2.3.4.2 PSoC (Programmable System-on-Chip) en WSN
Además de los micro controladores, existe diferentes tecnologías de procesamiento como las FPGA, los PLCs y los procesadores, que a pesar de tener un desempeño elevado, no resultan ser útiles para la industria de las redes de sensado inalámbrico, por sus elevados costos, altos consumos o por simplemente no resultadas adecuadas sus características por su función costo-beneficio en esta área. Sin embargo existe un componente de procesamiento relativamente nuevo y con características deseables en el entorno WSN denominado PSoC que vale la pena comparar con los microcontroladores.
El PSoC o Programable System on Chip, es el nombre que recibe la tecnología de micro controladores programables con funcionalidades de bloques analógicos y digitales desarrollada por la empresa llamada Cypress Semiconductor en el año 2002 [41]. El PSoC comprende una matriz configurable de funciones analógicas y una de funciones digitales, pudiendo proveer a cualquier pin del circuito integrado cualquier función disponible soportada, lo que confiere una gran versatilidad al PSoC frente a los micro controladores. Dentro de las cualidades y características importantes del PSoC es necesario resaltar la capacidad de enrutamiento e interconexión, bloques analógicos programables, bloques digitales programables y la CPU, los cuales se mencionan y describen a continuación [42].
2.3.4.3 Enrutamiento e interconexión programable.
El PSoC permite el enrutamiento de cualquier señales internas a los pines del circuito integrado seleccionados por el usuario, eliminando algunos inconvenientes de los micro controladores, en los cuales existen pines dedicados para cada periférico. Además los buses globales permiten el transporte de señales analógicas o digitales dentro del PSoC, permitiendo interconectar diferentes periféricos de manera interna.
2.3.4.4 Bloques analógicos programables.
El PSoC comprende una gran diversidad de bloques analógicos programables, que eliminan la necesidad de adicionar hardware externo y permite crear una gran variedad de sofisticados circuitos, dentro de dichos bloques analógicos programables se encuentran amplificadores, comparadores, ADC, DAC, PGA, condensadores conmutados, touch sensing etc.
Bloques digitales programables.
49 CPU
El PSoC se basa en un sistema de procesamiento ARM Cortex, que varía dependiendo de la familia del PSoC, que proveen una cantidad de recursos esenciales incluyendo:
Oscilador de baja velocidad principal e Interno.
Conectividad con oscilador de cristal externo para precisión de reloj programable Contadores de tiempo de sueño y de vigilancia.
Fuentes de reloj múltiples que incluyen un PLL.
Los PSoC también han dedicado interfaces de comunicación como I2C, Full-Speed USB 2.0, CAN 2.0, Bluetooth Low Energy y capacidades de depuración en el chip utilizando JTAG y SWD. Los nuevos miembros de los procesadores estándar de la industria de la familia PSoC como ARM Cortex-M3 y ARM Cortex-M0.
2.3.4.5 PSoC 5LP
Para el presente trabajo, se selecciona el PSoC de la familia 5, de referencia CY8CKIT-059, debido a su bajo costo de adquisición (10 Dólares) y a su gran poder computacional y su versatilidad frente a las otras referencias de PSoC y que como se mostrara a continuación, supera ampliamente los micro controladores mencionados en aplicaciones de WSN, además de la facilidad que ofrece de programación mediante bloques [43].
Figura 2.30. CY8CKIT-059 PSoC® 5LP Prototyping Kit, tomado de [43]
El CY8CKIT-059 es el PSoC más integrado de la industria [43], que combina bloques analógicos y digitales programables de alta precisión con un procesador ARM Cortex M3 de 32 bits y con las características relevantes mostradas a continuación.
Voltaje de alimentación: 3.3V a 5V 46 Pines I/O disponibles
Frecuencia de operación máxima de 80 MHz. Memoria Flash: 256 Kbytes
Memoria Ram: 64 Kbytes
4 temporizadores.
2 ADC tipo SAR de 12 Bits, 1 ADC Delta-Sigma de 20 Bits, hasta 118Ksps.
4 DAC
4 Amplificadores Operacionales 1 Bloque de filtro digital.
24 bloques UDB que permiten ser programados como temporizadores, contadores, Generador PWM,
4 Bloques UART
![Figura 2.2. Topologías de red de una WSN, tomada de [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/5648617.738553/25.918.238.687.504.723/figura-topologías-red-wsn-tomada.webp)
![Figura 2.18. Representación de un "0" en el sensor DHT11, tomado de [28].](https://thumb-us.123doks.com/thumbv2/123dok_es/5648617.738553/39.918.227.668.111.256/figura-representación-sensor-dht-tomado.webp)
![Figura 2.25. Curva característica del sensor GP2Y0A02YK, tomado de [31].](https://thumb-us.123doks.com/thumbv2/123dok_es/5648617.738553/42.918.284.619.614.912/figura-curva-característica-sensor-gp-y-yk-tomado.webp)
![Figura 2.31. Interface de usuario del PSoC Creator, tomado de [44].](https://thumb-us.123doks.com/thumbv2/123dok_es/5648617.738553/50.918.134.790.633.1010/figura-interface-de-usuario-del-psoc-creator-tomado.webp)