Diseño de una aplicación con interfaz gráfica para la estimación de parámetros del modelo doble jaula del motor de inducción a partir de datos de catálogos
71
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética. TRABAJO DE DIPLOMA Diseño de una aplicación con interfaz gráfica para la estimación de parámetros del modelo doble jaula del motor de inducción a partir de datos de catálogos Autor: Asiel Torres Rojas e-mail: [email protected] Tutores: Msc. Deivis Jesús Arias Álvarez e-mail: [email protected] Dr. Ignacio Pérez Abril e-mail: [email protected] Santa Clara 2014 “Año 56 de la Revolución ".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. El hombre nada puede aprender sino en virtud de lo que ya sabe. Aristóteles.
(5) ii. DEDICATORIA. A mi madre por todo el esfuerzo y sacrificio, por brindarme todo el amor, la comprensión, el apoyo incondicional y la confianza en cada momento de mi vida y sobre todo en mis estudios universitarios..
(6) iii. AGRADECIMIENTOS. A mis amigos y profesores porque siempre estuvieron pendientes de mi progreso universitario día a día y me dieron su apoyo cuando lo necesité sin pedirme nada a cambio. Ustedes me acompañaron a lo largo de este proceso estuvieron pendientes de que todas las cosas me salieran bien y de que no tomara una mala decisión, les agradezco la confianza que depositaron en mí. Gracias por confiar y creer en mí y haber hecho de mi etapa universitaria un trayecto de vivencia que nunca voy a olvidar. A mi amigo Amed Abel Leiva Mederos por su ayuda incondicional con todo el componente metodológico de este trabajo. A mis tutores Ignacito y Deivis por ofrecerme la posibilidad de trabajar en un proyecto que involucra la programación vinculada con componentes de la carrera..
(7) iv. RESUMEN. El presente trabajo muestra el procedimiento para crear una aplicación con interfaz gráfica con el objetivo de estimar los parámetros del circuito equivalente de un motor trifásico de simple o doble jaula de ardilla a partir de las tablas y curvas de comportamiento dadas por los fabricantes. Este software permite estimar con suficiente precisión el comportamiento de las variables energéticas del motor de inducción para condiciones de voltaje de alimentación nominal o diferente de este y carga arbitraria. Se implementó en MATLAB 8.1, una aplicación computacional a partir del procedimiento propuesto con la cual puede determinarse el comportamiento energético del motor. El método propuesto tiene la ventaja de no interrumpir el proceso productivo. La aplicación de este trabajo en la industria cubana puede facilitar extraordinariamente el análisis energético de los motores eléctricos en servicio y así adoptar medidas para el ahorro de energía, siendo en la actualidad de gran prioridad para el desarrollo de nuestro país..
(8) v. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii RESUMEN ............................................................................................................................iv INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS. DEL MODELO DOBLE JAULA........................................................................................... 9 1.1. Introducción ............................................................................................................ 9. 1.2. Procedimientos para estimar los parámetros del circuito equivalente doble. jaula 10 1.2.1. Procedimiento con Newton-Rapson.......................................................... 10. 1.2.2. Procedimiento con mínimos cuadrados ................................................... 12. 1.2.3. Procedimiento con algoritmos genéticos.................................................. 14. 1.3. Procedimiento con métodos combinados........................................................ 16. 1.3.1. Modelo circuital doble jaula empleado en el procedimiento combinado 17. 1.4. Funciones de error empleadas en el cálculo de los parámetros ................. 19. 1.5. Determinación de las características de comportamiento ............................ 22.
(9) vi 1.5.1. Determinación de las características de comportamiento mediante el. deslizamiento especificado ........................................................................................... 22 1.5.2. Determinación de las características de comportamiento mediante la. potencia de salida .......................................................................................................... 23 1.6. Determinación del deslizamiento para momento máximo y de empuje ..... 24. 1.7. Consideraciones finales del capítulo ................................................................ 26. CAPÍTULO 2.. IMPLEMENTACIÓN. DEL ALGORITMO GENÉTICO EN LA. ESTIMACIÓN DE PARÁMETROS.................................................................................... 27 2.1. Introducción .......................................................................................................... 27. 2.2 2.3. Definición de Algoritmos Genéticos .............................................................. 28 Características de los Algoritmos Genéticos .................................................. 29. 2.4. Ventajas y desventajas respecto a otras técnicas de búsqueda ............ 30. 2.5. Cuándo usar estos algoritmos ....................................................................... 31. 2.6. Consideraciones importantes para utilizar Algoritmos Genéticos ........... 31. 2.6.1. Tipo de representación................................................................................ 31. 2.6.2. Población inicial ............................................................................................ 32. 2.6.3. Función de Adaptación................................................................................ 33. 2.6.4. Variantes de Selección................................................................................ 33. 2.6.5. Tipos de Cruce ............................................................................................. 34. 2.6.6. Tipos de Mutación ........................................................................................ 35. 2.6.7. Manejo de individuos infactibles ................................................................ 35. 2.6.8. Reemplazo de la población y condición de parada ................................ 36. 2.7 2.7.1 2.8. Algoritmo Genetico Multiobjetivo ................................................................... 37 Métodos de solucion de los algoritmos genéticos multiobjetivos ......... 38 Caracteristicas del algoritmo genético implementado en este trabajo.... 39.
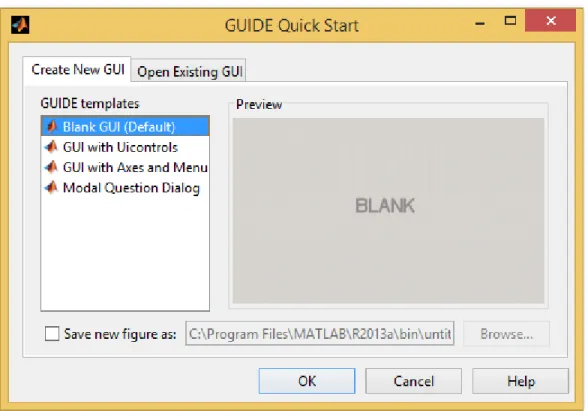
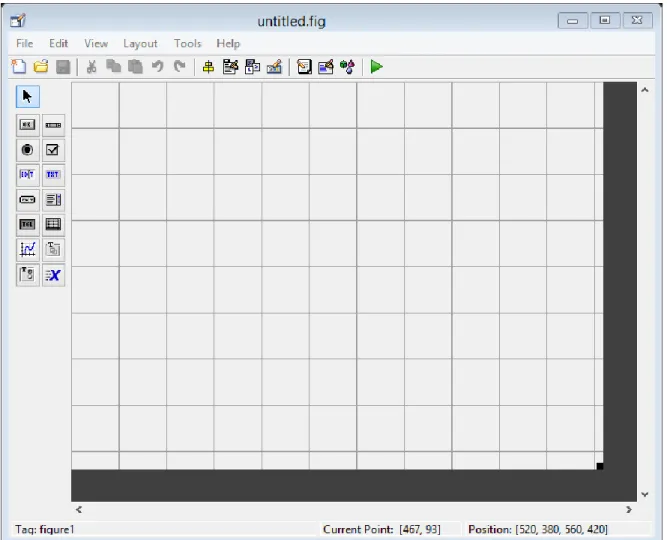
(10) vii CAPÍTULO 3.. DISEÑO Y PRESENTACIÓN DE LA INTERFAZ GRÁFICA ............ 40. 3.1. Aspectos generales del GUIDE del MATLAB v8.1 ........................................ 40. 3.2. Diseño de la interfaz Gráfica ............................................................................. 46. 3.3. Presentación de la interfaz gráfica ......................................................................... 50. CONCLUSIONES Y RECOMENDACIONES ................................................................... 54 Conclusiones .................................................................................................................. 54 Recomendaciones ......................................................................................................... 55 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 56 ANEXOS .............................................................................................................................. 59 Anexo I. Datos del fabricante Baldor para motor de inducción de 100HP ......... 59. Anexo II. Datos del fabricante Baldor para motor de inducción de 60HP ......... 60. Anexo III. Datos del fabricante Baldor para motor de inducción de 40HP ......... 61.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. Los motores de inducción trifásicos son los principales consumidores de energía eléctrica en el mundo, se ha comprobado que aproximadamente 50 % de la energía eléctrica que se consume es a través de los motores de inducción trifásicos por constituir la fuerza motriz principal de la industria moderna. Debido al método de inducción trifásico de producción de energía, los motores de inducción son fáciles de operar. Como resultado, estos motores son bastantes adecuados para usos grandes como en las industrias. Su funcionamiento es relativamente simple porque el motor de inducción puede auto-iniciarse ya que no hay conectores eléctricos hacia el rotor que suministren energía y la corriente es inducida por la acción que ejecuta el transformador en el rotor, debido a la baja resistencia de las bobinas giratorias. En grandes aplicaciones industriales, esto puede resultar en la reducción del esfuerzo necesario para el mantenimiento. Estos motores son extremadamente resistentes lo que los convierte en la máquina ideal para usos pesados. Su bajo costo de mantenimiento y durabilidad complementa su resistencia y como resultado, éstos motores. pueden. funcionar. durante. años. relativamente. sin. costo. por. mantenimiento. Su capacidad de ser conectado directamente a una fuente de corriente alterna puede no significar mucho en usos domésticos, pero en usos industriales, significa un ahorro de costo importante. El costo inicial de la instalación puede ser un poco alto, pero se ahorrará dinero a largo plazo debido al bajo costo de mantenimiento y durabilidad del producto. Además, es un diseño flexible que permite que las innovaciones y nuevas tecnologías se incorporen fácilmente sin incurrir en costes.
(12) INTRODUCCIÓN. 2. adicionales o necesidad de cambios en el diseño básico. Estas realidades, unidas a la crisis energética de fines del siglo pasado y principios del actual, han motivado, por una parte, la fabricación de motores cada vez más eficientes, y por otra, la adopción de disposiciones legales por parte de los gobiernos de muchos países tendientes a obligar a los usuarios de los motores a tomar todas las medidas conducentes a la disminución del consumo de energía eléctrica de estas máquinas. La estimación del comportamiento en estado transitorio y estable es de vital importancia para temas de estabilidad de sistemas eléctricos y para la evaluación del desempeño eficiente de estos motores. La mayoría de los fabricantes ofrecen datos sobre el comportamiento del motor para estados característicos de operación y bajo condiciones de voltaje y frecuencia fijadas, conocidos estos últimos como nominales. Por lo que resulta fundamental la estimación mediante los datos aportados por el fabricante de los parámetros que conforman el circuito equivalente doble jaula del motor de inducción trifásico, con el objetivo de realizar estudios en régimen dinámico y estable, bajo condiciones iguales o diferentes a las nominales como: voltajes desbalanceados, y desviación de voltaje, etc. Estudios efectuados por autores nacionales [1][2], trataron la estimación de parámetros del modelo circuital doble jaula y jaula profunda para posteriormente obtener las características de comportamiento del mismo. La estimación de estos parámetros se realizó con un gran cúmulo de datos, entre ellos, las dimensiones constructivas de las diferentes partes del rotor y estator. Además aspectos relacionados con el diseño de la máquina, tales como, tipo de estructura ferromagnética, características de los materiales empleados etc. Los datos con los cuales. no. se. contaban. fueron. asumidos. mediante. consideraciones. y. aproximaciones dada por la literatura. Los resultados obtenidos en estas investigaciones resultaron buenos y cumplieron con sus objetivos propuestos al estimar los parámetros del modelo doble jaula y comprobar su efectividad en la obtención de las características de comportamiento..
(13) INTRODUCCIÓN. 3. En la actualidad la disponibilidad de datos específicos de estos motores es prácticamente imposible, muchos menos a nivel industrial. Apenas se cuenta con el comportamiento del motor en estados típicos de régimen estable, además de las corrientes y momentos para puntos característicos de operación inestable como: momentos de arranque, empuje y máximo. En cambio datos como el número de polos y frecuencia, son frecuentemente ofrecidos.. Autores de reconocido prestigio del ámbito internacional, [3],[4],[5],[6],[7], proponen metodologías para el cálculo de parámetros del circuito equivalente a partir de los escasos datos ofrecidos por el fabricante. Un número considerable de ellos emplean el modelo doble jaula y determinan sus parámetros, pero solo garantizan realizar estudios dinámicos, además emplean ciertas consideraciones que no necesariamente tienen que generalizarse. La necesidad de estimar los parámetros y obtener un modelo circuital capaz de predecir el comportamiento en estado transitorio y estable bajo condiciones iguales o no a las especificadas por el fabricante condiciona el problema científico de la investigación. ¿Cómo facilitar la estimación de los parámetros y obtener un modelo circuital capaz de predecir el comportamiento en estado transitorio y estable bajo condiciones iguales o no a las especificadas?. Preguntas de Investigación 1. ¿Cuáles son los referentes teórico metodológicos que sustentan los procedimientos para estimar los parámetros del circuito equivalente del modelo doble jaula del motor de inducción? 2. ¿Qué características distinguen los algoritmos genéticos desde el punto de vista computacional para la estimación de los parámetros del modelo doble jaula? 3. ¿Qué tipo de aplicación puede implementarse a partir de los procedimientos escogidos y con el uso de los algoritmos genéticos?.
(14) INTRODUCCIÓN. 4. 4. ¿Qué resultados en materia de estimación de los parámetros del modelo doble jaula y de predicción de estados dinámicos y estables de operación arroja la aplicación propuesta?. Como Objetivo General de este trabajo se declara: Diseñar una aplicación computacional con interfaz gráfica para estimar los parámetros del circuito equivalente doble jaula del motor de inducción a partir de los datos ofrecidos por el fabricante para predecir estados dinámicos y estables de operación.. Los Objetivos Específicos que se trazan para dar cumplimiento al objetivo general son: Determinar los referentes teóricos metodológicos relacionados con los procedimientos para estimar los parámetros del circuito equivalente del modelo doble jaula del motor de inducción. Identificar algunos procedimientos para la estimación de parámetros. Diseñar una aplicación computacional con interfaz gráfica capaz de estimar los parámetros del circuito equivalente doble jaula a partir de los datos ofrecidos por el fabricante y de permitir su análisis. Implementar en MATLAB v8.1, la aplicación. propuesta de manera que. facilite la estimación de los parámetros del circuito equivalente doble jaula..
(15) INTRODUCCIÓN. 5. La hipótesis de investigación establecida para este trabajo investigativo es: La aplicación propuesta permite estimar los parámetros del modelo doble jaula del motor de inducción con suficiente precisión para predecir estados dinámicos y estables de operación. La importancia del trabajo radica en la estimación de los parámetros del modelo circuital doble jaula partir de escasos datos, exactamente los ofrecidos por el fabricante y la predicción del comportamiento para estados dinámicos y estables de operación. Esto contribuirá a la realización de estudios de predicción bajo diferentes regímenes y sometidos a condiciones de explotación nominales o fuera de las mismas.. Métodos y Técnicas de Investigación Como toda investigación los métodos de investigación empleados en esta tesis responden específicamente al objeto de estudio de la investigación y a los objetivos que se plantean en la misma. A continuación se declaran los métodos y las técnicas de investigación: Métodos de orden Teórico: Analítico-Sintético: Posibilita analizar por partes los principales documentos y consideraciones que describen los procedimientos para estimar los parámetros del modelo doble jaula hasta llegar a su actual proposición. Permite arribar a conclusiones sobre las metodologías estudiadas y el desarrollo de la aplicación. Inductivo-Deductivo: Los elementos particulares de los procedimientos para estimar los parámetros del modelo doble jaula se toman como referencia, a través de la inducción analítica, para desarrollar la investigación. Se parte de las potencialidades de estos para determinar los elementos que se necesita para su uso en la aplicación..
(16) INTRODUCCIÓN. 6. Análisis Documental: A través de los métodos teóricos antes explicados se realizó un minucioso análisis documental, utilizando materiales escritos, sin perder de vista el análisis del contexto histórico, lógico y social. Se utilizó toda la información que brindó cada documento y se siguió la siguiente metodología para el análisis:. 1. Determinar los objetivos de estudio documental: Dirigido a revelar los documentos que existen sobre procedimientos para la estimación de parámetros del modelo doble jaula. 2. Establecer la muestra de los documentos que serán estudiados: Determinar aquellos documentos que son imprescindibles para identificar los elementos necesarios para la estimación de parámetros del modelo doble jaula. Entre ellos están obras impresas, publicaciones seriadas impresas y digitales, así como diversos artículos de algunos buscadores especializados como Google Scholar sobre el tema y publicaciones especializadas.. 3. Determinar las unidades de análisis en las que se fracciona el contenido para estudiar el documento: Teniendo en cuenta la situación el desarrollo del tema se establecen las unidades de análisis o los acápites que incluye la tesis.. 4. Elaborar las categorías de análisis: Se realizó a partir de los conceptos necesarios para comprender la importancia de la estimación de parámetros del modelo doble jaula y el desarrollo de sus arquetipos metodológicos.. 5. Realizar el estudio documental registrando la información: Se realizó el registro de la información siguiendo la lógica de trabajo expresada en los pasos anteriores..
(17) INTRODUCCIÓN. 7. 6. Valoración de la información obtenida: Se realizaron valoraciones a partir de los presupuestos teóricos y metodológicos precisados, realizándose inferencias, argumentaciones, críticas y, finalmente, arribando a conclusiones sobre los elementos que debe contener una aplicación para la estimación de parámetros del modelo doble jaula.. Modelación: Se distingue que a partir de la modelación pueda hacerse la abstracción y la algoritmación necesaria para modelar el sistema y las estrategias de programación para calcar las condiciones de la realidad y solucionar el problema.. Herramientas para la investigación: Para el desarrollo de la investigación se utilizó el software MATLAB en su versión 8.1 en la programación de los procedimientos necesarios para la estimación de los parámetros del modelo circuital doble jaula y la herramienta GUIDE para el diseño de la interfaz gráfica de la aplicación.. Aporte del Trabajo El aporte del trabajo, desde el punto de vista metodológico, radica en el procedimiento propuesto para estimar los parámetros del circuito equivalente doble jaula del motor de inducción, a partir de los datos de catálogos ofrecidos por el fabricante. Desde el punto de vista práctico, el aporte está en la aplicación computacional implementada, la cual puede ser utilizada para la estimación de parámetros del circuito equivalente doble jaula del motor de inducción trifásico y para el análisis del comportamiento para estados dinámicos y estables de operación..
(18) INTRODUCCIÓN. 8. Organización del informe El informe de la investigación se encuentra estructurado en introducción, tres capítulos. de. desarrollo,. conclusiones,. recomendaciones. y. referencias. bibliográficas. En el capítulo uno se presenta la descripción del procedimiento propuesto para estimar los parámetros del modelo circuital del motor de inducción. Además se muestra de forma reducida investigaciones llevadas a cabo por diferentes autores en la estimación de parámetros en motores de inducción. El capítulo número dos presenta las características fundamentales de los algoritmos genéticos así como las particularidades del usado en este trabajo. El capítulo tres se dedica al diseño y descripción de la aplicación computacional con interfaz gráfica implementada en MATLAB v8.1 con diferentes motores de la firma Baldor, para esto se efectúan corridas con modelos simple jaula y doble jaula..
(19) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 9. CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 1.1. Introducción. Los motores de inducción trifásicos con rotor de doble jaula o jaula profunda son muy empleados en la industria, ambos tipos de motores pueden representarse por el modelo circuital doble jaula con precisión adecuada [8], [9]. Con frecuencia solo se cuenta con los datos nominales y las tablas de comportamiento para estados típicos de operación subcargados, nominal y con cierta sobrecarga, lo que dificulta estimar los valores de los parámetros del circuito equivalente. En la última década varios autores, [10], [11], [12], [13], han investigado en la estimación de los parámetros del circuito equivalente del motor cuando se cuenta únicamente con los datos ofrecidos por el fabricante. Se utilizan y comparan modelos capaces de ajustarse lo mejor posible al comportamiento del motor. Muchos de los investigadores proponen en sus métodos, el cálculo de los parámetros para realizar solamente estudios dinámicos, para cuestiones de arranques, ajustes de protecciones, estabilidad, etc..
(20) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 10. 1.2 Procedimientos para estimar los parámetros del circuito equivalente doble jaula En este trabajo se analizan algunos de los procedimientos para la estimación de parámetros del circuito equivalente, los cuales se han organizado de la manera siguiente: 1) Procedimiento con Newton-Rapson 2) Procedimiento con mínimos cuadrados 3) Procedimiento con algoritmos genéticos A continuación se detallan cada uno de éstos.. 1.2.1 Procedimiento con Newton-Rapson En la investigación descrita en [3], se determinan los parámetros del circuito equivalente doble jaula del motor asincrónico trifásico para realizar estudios dinámicos. Se emplea para solucionar el sistema de ecuaciones no lineales el método de Newton-Rapson, con ciertas modificaciones que garantizan un alto grado de convergencia. Las estimaciones iniciales de cada parámetro son obtenidas a partir de la estimación de los parámetros correspondientes al modelo circuital simple jaula. Además de los parámetros del modelo de simple jaula, se considera además, que la jaula externa tiene resistencia cinco veces mayor que la jaula interna, así como la reactancia de dispersión de la jaula interna es un 120% mayor que la reactancia de dispersión del estator. Cuando el método no converge se trata determinar un intervalo de momento máximo o corriente de arranque, pues estas magnitudes son las que más influyen en la convergencia del problema [3]..
(21) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 11. El modelo circuital empleado es el correspondiente al doble jaula, este se muestra en la figura 1.1. Este considera las pérdidas de núcleo y las mecánicas en una resistencia (RFm) a la entrada del circuito. La estimación de los parámetros del circuito equivalente se efectúa mediante ocho datos ofrecidos por el fabricante: resistencia del estator, potencia, eficiencia, factor de potencia y velocidad en condiciones nominales, además el momento y la corriente en condiciones de arranque y el momento máximo, incluye también los datos de chapa de voltaje, frecuencia y número de polos. Propone que la reactancia de dispersión del estator sea igual a la reactancia de dispersión de la jaula externa, de esta manera completa el sistema de ecuaciones necesarias para estimar los parámetros. El sistema de ecuaciones empleado se muestra a continuación.. Figura 1.1. Modelo circuital doble jaula empleado por [3]. RFM : Resistencia equivalente de la rama de magnetización Rs : Resistencia equivalente del estator Xsd : Reactancia equivalente del estator Xm : Reactancia equivalente de la rama de magnetización X1d : Reactancia de dispersión equivalente de la jaula externa R1 : Resistencia equivalente de la jaula externa X2d : Reactancia de dispersión equivalente de la jaula interna R2 : Resistencia equivalente de la jaula interna. (1.1).
(22) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 12. (1.2) (1.3) (1.4) (1.5) (1.6) El autor emplea el método de Newton-Rapson el cual necesita una estimación inicial bastante cercana a la solución, garantizarlo puede ser bastante complejo y por tanto es posible no llegar a la convergencia. Al ubicar RFm conectada directamente al voltaje de alimentación, introduce imprecisiones en el modelo y en el significado físico de la misma. El planteamiento Xsd =X2d no siempre se cumple. El modelo empleado no considera la reactancia de dispersión mutua entre ambas jaulas, si bien es cierto que la misma tiene valores muy pequeños, podría tener implicación en algún caso de estudio.. 1.2.2 Procedimiento con mínimos cuadrados En [4] se utiliza el modelo doble jaula del motor de inducción con la finalidad de realizar estudios en regímenes transitorios, por ejemplo el arranque. Para estimar los parámetros se empleó la función fsolve del MATLAB, la misma se basa en el método de los mínimos cuadrados. El modelo circuital empleado se muestra en la figura 1.2, este cuenta con siete elementos a identificar. Para la estimación de los parámetros se usan cinco datos del fabricante, estos son: potencia mecánica y reactivo consumido a plena carga; corriente y momento en el arranque y momento máximo..
(23) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 13. Figura 1.2. Modelo circuital doble jaula empleado por [4]. Además establecen las restricciones siguientes: La reactancia de la jaula externa es múltiplo de la reactancia de dispersión de armadura ( X2d=Kr Xsd ). La resistencia del estator es múltiplo de la resistencia de la jaula externa (Rs= Kx R1). Esta última restricción es posible debido a que los autores concluyen que la variación de la resistencia del estator influye muy poco en la variación de las magnitudes a obtener, siempre debe cumplirse que Kr>0 y Kx>0. Los valores de Kr empleados fueron 0.5 y 1.5; para los valores de Kx 0; 0.5 y 1. Cada valor de Kr se combina con todos los valores de Kx. El procedimiento exige cumplir las condiciones referentes a que la jaula externa posea menor reactancia de dispersión que la interna ( X2d < X1d ) y que la resistencia de esta última sea menor que la primera (R1< R2). El sistema de ecuaciones utilizado es:. (1.7) (1.8) (1.9) (1.10) (1.11).
(24) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 14. La función de error se determina por la ecuación 1.12, cada una de las magnitudes tratadas se expresan en por unidad respecto a los valores ofrecidos por el fabricante, para dar igual importancia a éstas en el cálculo del error.. (1.12) El modelo doble jaula arroja resultados satisfactorios en el cálculo de los parámetros. Este es útil en los estudios en estado inestable, es decir en la zona de la característica de momento desde arranque hasta momento máximo. Al no considerar las pérdidas rotacionales y realizar varias simplificaciones, no es prudente emplear sus resultados para realizar estudios energéticos. El deslizamiento máximo empleado es el correspondiente al calculado del modelo simple jaula, esto evidentemente incorpora errores en los cálculos. La reactancia de dispersión mutua es considerada cero, lo que puede causar errores en el cálculo en algunos casos prácticos. Las restricciones de variables y constantes como Kx y Kr pueden arrojar resultados satisfactorios en algunos motores pero no en otros.. 1.2.3 Procedimiento con algoritmos genéticos En la investigación descrita en [13] se determinan los parámetros del modelo doble jaula para el estudio dinámico en el arranque de la máquina asincrónica, con el empleo de algoritmos genéticos (AG). Para esto se utilizan datos ofrecidos por el fabricante como: corriente y momento en el arranque, momento y factor de potencia a plena carga; y el momento máximo. Se concluye que el modelo circuital simple jaula conlleva serias imprecisiones en la obtención del momento máximo, y en menor grado el correspondiente a plena carga y arranque, debido a que muchos motores son jaula profunda o doble jaula los cuales no pueden ser modelado con precisión con el modelo simple jaula. El modelo doble jaula propuesto se muestra en la figura 1.3..
(25) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 15. Figura 1.3. Modelo circuital doble jaula empleado por [13]. La expresión para determinar el deslizamiento a momento máximo es relativamente compleja, se obtiene mediante la solución de un polinomio grado seis. Los autores proponen dos vías para solucionar tal problema. La primera consiste en estimar el deslizamiento al cual ocurre el momento máximo mediante un método iterativo, con este determinar el valor máximo de momento en la curva de momento contra deslizamiento en la zona que se define como más probable. El segundo, llamado método simplificado, plantea asumir el deslizamiento al cual ocurre el momento máximo en el modelo simple jaula, igual al de doble jaula. Finalmente comparan la eficacia de este método de estimación de parámetros respecto al Newton-Rapson y demuestran la superioridad sobre este último. A juicio del autor de este trabajo la investigación descrita en [13] muestra una técnica novedosa para la solución de sistemas de ecuaciones no lineales que arroja excelentes resultados. La estimación de parámetros se realiza para el estudio en régimen transitorio (arranque), se modela la máquina con el circuito doble jaula. El modelo empleado no cuenta con las resistencias que representen las pérdidas rotacionales. Se proponen técnicas de gran utilidad para el cálculo del deslizamiento al cual ocurre el momento máximo. Actualmente, la generalidad de los fabricantes de motores suministra en sus catálogos datos como los presentados en los anexos I, II y III, a los que puede accederse desde internet. Al contar con estos datos es posible estimar los parámetros del circuito equivalente del motor que reproduzca con la mayor precisión posible las características de comportamiento del fabricante..
(26) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 16. Es muy difícil obtener un modelo que sea capaz de reproducir exactamente las tablas de comportamiento del motor, por lo que se pretende es estimar los parámetros del modelo doble jaula que reproduzca dichas tablas con el menor error posible. Esto puede entenderse como un problema clásico de regresión, donde se determinan los parámetros del modelo que mejor se ajusta a los datos suministrados. Por lo tanto, el problema planteado puede ser resuelto como un problema de mínimos cuadrados, es decir, donde se minimiza la suma de los errores al cuadrado.. 1.3 Procedimiento con métodos combinados El autor de este trabajo considera la combinación del método de la secante y el algoritmo genético como una técnica de estimación de parámetros que arroja buenos resultados. El algoritmo genético garantiza con los datos de catálogos ofrecidos por el fabricante, la obtención de parámetros para el modelo doble jaula, estos se obtienen a partir de la minimización de la función de error propuesta. Para la obtención de los parámetros se efectúa una determinada cantidad de iteraciones, en cada una de ellas el algoritmo genético propone un juego de parámetros, estos son utilizados en el método de la secante para calcular el deslizamiento al cual ocurre un estado de potencia especificado por el fabricante. Una vez determinado los parámetros y el deslizamiento se calculan las magnitudes de comportamiento ofrecidas por el propio fabricante y se emplean en la función error. Este proceso se repetir hasta que se determina el juego de parámetros que más se ajusta a los datos ofrecidos por el fabricante. En el anexo VI se presenta un fragmento de la aplicación implementada en MATLAB 8.1..
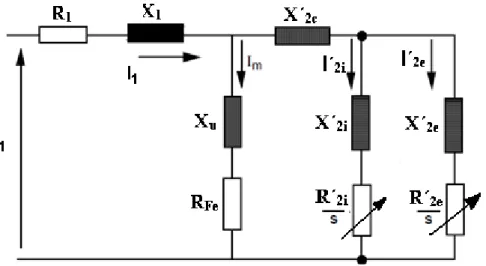
(27) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 17. 1.3.1 Modelo circuital doble jaula empleado en el procedimiento combinado El modelo circuital seleccionado es el correspondiente a la figura 1.4. Este modelo considera de manera acertada los fenómenos presentes en los motores con rotor de doble jaula y de ranura profunda. En este trabajo se realizan pequeñas modificaciones a dicho circuito. Los componentes de la rama de magnetización se consideran en serie. La resistencia de los anillos de cortocircuito del rotor se incluye dentro de las resistencias de las jaulas.. Figura 1.4. Modelo del motor de doble jaula para el procedimiento combinado. Donde: R1: Resistencia equivalente del devanado del estator X1: Reactancia equivalente de dispersión del devanado del estator RFe: Resistencia equivalente de la rama de magnetización Xu: Reactancia equivalente de la rama de magnetización X´2c: Reactancia equivalente de dispersión común a ambas jaulas R´2i: Resistencia de la jaula interna X´2i: Reactancia de dispersión de la jaula interna R´2e: Resistencia de la jaula interna.
(28) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 18. X´2e: Reactancia de dispersión de la jaula externa Este modelo toma en cuenta las pérdidas rotacionales compuestas por las mecánicas dadas por la fricción y el batimiento y las magnéticas originadas por las pérdidas por histéresis y corrientes parásitas. No se desprecian ninguna de las reactancias que modelan el rotor, o sea, se incluyen las de dispersión tanto las correspondientes a cada jaula, como la mutua entre éstas. Los valores de los parámetros del modelo se consideran constantes para cualquier estado de operación. Además se establecen las consideraciones, para el trabajo con el modelo doble jaula, siguientes: Estator y rotor lisos (entrehierro constante). Se desprecian los efectos producidos por el ranurado del estator y del rotor en el valor de las inductancias propias y mutuas de los devanados. Máquina con topología simétrica (bobinas del estator iguales entre sí). Permeabilidad magnética del hierro elevada (reluctancia magnética despreciable frente a la del entrehierro). Comportamiento magnético del hierro lineal, es decir, no se consideran los efectos de saturación. Distribución sinusoidal del campo en el entrehierro. Las fuerzas magnetomotrices debidas a los devanados del estator siguen una distribución sinusoidal espacial a lo largo del entrehierro, despreciándose las armónicos espaciales. Un aspecto importante en el procedimiento de cálculo para la estimación de parámetros consiste en la selección de las funciones de error. La misma se realiza con los datos ofrecidos por el fabricante y a consideración del autor..
(29) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 19. 1.4 Funciones de error empleadas en el cálculo de los parámetros En el procedimiento, las funciones de error se seleccionaron a partir de los datos presentes de los catálogos ofrecidos por el fabricante. Para este propósito las magnitudes seleccionadas son: la velocidad nominal de operación, la eficiencia, factor de potencia y corriente, estos tres últimos para cada estado de carga. Además se escogen los momentos y corrientes típicos en la zona inestable de operación. La determinación de los errores entre el ajuste resultante del modelo doble jaula y los datos suministrados, puede realizarse de diferentes maneras, no obstante, debe considerarse lo siguiente: 1. Con respecto a las velocidades de operación, la mayoría de los fabricantes, solo informa la correspondiente el estado nominal del motor, por tal razón este procedimiento solo emplea esta velocidad. 2. Las curvas de comportamiento en la zona estable se obtienen para determinados coeficientes de carga (0, 0.25, 0.5, 0.75, 1, 1.25), por lo que se determinan los errores como las diferencia entre los valores calculados y de dato. Los errores se calculan para las magnitudes de corriente, eficiencia y el factor de potencia para cada coeficiente de carga. 3. Las características de momento y corriente contra velocidad, no son comúnmente suministradas por todos los fabricantes, generalmente solo se informa los valores de momento y corriente. En este procedimiento se consideran los valores de momentos y corrientes dados por el fabricante, luego no se tiene en cuenta el dato de velocidad ofrecido en el catálogo para los momentos de empuje y máximo..
(30) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 20. A partir de las consideraciones precedentes, se definen las funciones de error siguientes: 1) Error en el deslizamiento nominal.. snom 100 * 1 snomcalc / snomdato. (1.13). Donde:. snom calc : Valor que se obtiene para carga nominal por el procedimiento. snom dato : Valor ofrecido para carga nominal por el fabricante Este error se multiplica por 100 para incrementar su valor resultante y así el procedimiento tiene que trabajar en función de reducirlo, de esta manera se garantiza obtener la potencia nominal a la velocidad nominal de operación. Esta constante puede ser variada en dependencia de la importancia que se quiera dar al mismo. 2) Errores de eficiencia, factor de potencia y corriente para cada uno de los estados de carga:. Ef Efcalc Efdato. (1.14). FP FPcalc FPdato. (1.15). I I calc I dato. (1.16). Donde:. Efcalc , FPcalc , I calc : Valores que se obtienen por el procedimiento Ef dato , FPdato , I dato : Valores ofrecido por el fabricante.
(31) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 21. Los valores calculados de estas magnitudes se obtienen, cuando se determinan mediante los parámetros del circuito equivalente resultante del algoritmo genético y los deslizamientos que se logran para cada una de las potencias de salida especificadas (0, 25%, 50%, 75%, 100%, 125%). Los deslizamientos se calculan por el método de la secante. 3) Errores de momento y corriente para los cuatro estados de la características de momento-velocidad ofrecidos por el fabricante (arranque, empuje, máximo y nominal).. M (c) M (c)calc M (c)dato. (1.17). I (c) I (c) calc I (c) dato (1.18) Donde:. M (c) calc , I (c) calc : Valores que se obtienen por el procedimiento M (c) dato , I (c) dato : Valores ofrecido por el fabricante Los momentos máximo y de empuje, se obtienen para los deslizamientos calculados por el procedimiento y en las condiciones referidas. El algoritmo genético, para efectuar el cálculo de los parámetros, necesita de una función a minimizar. El error cometido al estimar todas las magnitudes de comportamiento es considerado en la función objetivo. La ecuación 1.19 muestra la función utilizada en el procedimiento.. Fobj 2. (1.19).
(32) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 22. 1.5 Determinación de las características de comportamiento La determinación de las magnitudes de comportamiento del motor asincrónico a partir del circuito equivalente doble jaula se realiza mediante dos procedimientos: 1. A partir del deslizamiento especificado. 2. A partir de la potencia de salida especificada. Todas las expresiones que se utilizan en el procedimiento se expresan en por unidad, las bases que se seleccionan son: la potencia nominal del motor y el voltaje nominal del mismo.. 1.5.1 Determinación de las características de comportamiento mediante el deslizamiento especificado Para determinar las características de comportamientos a partir del deslizamiento, se calculan las impedancias de ambas jaulas para el deslizamiento especificado:. Z1 R1 / s jX1 Z 2 R2 / s jX 2. (1.20) (1.21). Con estos valores de impedancias, todos los parámetros del circuito quedan establecidos y con la tensión de alimentación se calculan todas las corrientes necesarias. El momento del motor es la suma de los momentos aportados por cada jaula.. M ( I12 * R1 / s) ( I 22 * R2 / s). (1.22). La potencia de salida del motor, como se consideran las pérdidas rotacionales en la rama de magnetización, se determina por:. P2 ( I12 ) * R1 * (1 s) / s ( I 22 ) * R2 * (1 s) / s. (1.23).
(33) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 23. Para hallar el factor de potencia del motor, primeramente, se calcula la potencia aparente que consume el motor.. S1 Vs * conj ( I s ). (1.24). Luego. Fp P1 / S1. (1.25). La eficiencia se determina como:. E f P2 / P1. (1.26). La velocidad en rpm se halla mediante la expresión siguiente:. RPM N s * (1 s). (1.27). 1.5.2 Determinación de las características de comportamiento mediante la potencia de salida A partir de la potencia de salida, es necesario determinar el deslizamiento al cual ocurre tal estado de carga. En este caso, se utiliza el método matemático de la secante, para calcular el deslizamiento correspondiente a la potencia de salida especificada. Con el deslizamiento, todas las magnitudes de interés se determinan por las expresiones 1.19 a la 1.27. El método de la secante es apropiado y sencillo de implementar. El algoritmo realizado en el procedimiento propuesto se muestra a continuación..
(34) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 24. s b s max sa 0 P2 a P2 (V1 , s a ) REPETIR P2 b P2 (V1 , s b ) sc sb . sb s a P2b P2 dato P2 b P2 a. s a sb sb sc P2 a P2 b HASTA QUE P2b P2 dato s sb. A diferencia del circuito simple jaula, para el modelo doble jaula la obtención de la expresión del deslizamiento al que se produce el momento máximo, es bastante compleja. Además, en los motores simple jaula no existe el llamado momento de empuje. Los valores del deslizamiento al cual ocurren los momentos de empuje y máximo se obtienen a partir de los ceros de un polinomio grado seis, donde cada uno de los coeficientes involucra parámetros del circuito equivalente doble jaula.. 1.6 Determinación del deslizamiento para momento máximo y de empuje Para determinar los extremos mínimos o máximos de una función continua, se iguala a cero la derivada de dicha función. Este es el procedimiento empleado para determinar el deslizamiento para momento máximo y de empuje.. dM ( s) / ds 0. (1.28).
(35) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 25. Para calcular la función de momento M(s), se aplica el teorema de Thevenin entre la rama del estator y la rama de magnetización del circuito equivalente de la figura 1.4 y se obtiene la impedancia:. Z th Z s // Z m. (1.29). La corriente total que circula por el rotor se halla por:. I r ( s) Vth / Z th ( jX 12 Z 2 ( s) // Z1 ( s)) . (1.30). Con un divisor de corriente se determina la corriente a cada jaula. I1 (s) I r (s) * Z 2 (s) /Z1 (s) Z 2 (s). (1.31). I 2 (s) I r (s) * Z12 (s) /Z1 (s) Z 2 (s). (1.32). El momento se calcula por la expresión siguiente:. M ( s) ( I1 ( s) 2 * R1 / s) ( I 2 ( s) 2 * R2 / s). (1.33). La ecuación 1.33, con ayuda del Toolbox de matemática simbólica del MATLAB 8.1, se implementó y se obtuvo su derivada en la forma de un polinomio de grado seis, para determinar los deslizamientos. El valor numérico de las raíces de este polinomio se determina con la función roots del MATLAB 8.1. La menor raíz real positiva corresponde al deslizamiento para momento máximo, en tanto que la mayor raíz real positiva corresponde al deslizamiento para momento de empuje..
(36) CAPÍTULO 1. PROCEDIMIENTO PARA LA ESTIMACIÓN DE PARÁMETROS DEL MODELO DOBLE JAULA. 26. 1.7 Consideraciones finales del capítulo El modelo doble jaula que se usa en el procedimiento combinado, con las consideraciones realizadas, permiten estimar todos sus parámetros de manera satisfactoria. El procedimiento implementado utiliza la combinación del método de la secante y el algoritmo genético de manera sencilla. La solución mediante el MATLAB del polinomio grado seis, para obtener los deslizamientos para momento máximo y de empuje, es adecuada..
(37) CAPÍTULO 2. MATERIALES Y METODOS. 27. CAPÍTULO 2. IMPLEMENTACIÓN DEL ALGORITMO GENÉTICO EN LA ESTIMACIÓN DE PARÁMETROS. 2.1 Introducción En las décadas de 1950 y 1960 varios científicos de modo independiente, comenzaron a estudiar los sistemas evolutivos, guiados por la intuición de que se podrían emplear como herramienta en problemas de optimización en ingeniería. La idea era evolucionar una población de candidatos a ser solución de un problema conocido, utilizando operadores inspirados en la selección natural y la variación genética natural [14] Aunque la primera mención del término y la primera publicación sobre una aplicación del mismo, se deben a Bagley en 1967 (quien diseñó un algoritmo genético para buscar conjuntos de parámetros en funciones de evaluación de juegos, y los comparó con los algoritmos de correlación, procedimientos de aprendizaje modelizados después de los algoritmos de pesos variantes de ese periodo), el que es considerado como creador de los algoritmos genéticos es John Holland, que los desarrolló, junto a sus alumnos y colegas, durante las décadas de 1960 y 1970. La mayor innovación de Holland fue la de introducir un algoritmo basado en poblaciones con cruces y mutaciones. Es más, Holland fue el primero en intentar colocar la computación evolutiva sobre una base teórica firme. Hasta hace poco, esta base teórica, fundamentada en la noción de esquemas, fue la estructura sobre la que se edificaron la mayoría de los trabajos teóricos sobre algoritmos genéticos en las décadas siguientes [15].
(38) CAPÍTULO 2. MATERIALES Y METODOS. 28. En la actualidad con el desarrollo y avances tecnológicos obtenidos, la aplicación de los algoritmos genéticos se ha expandido en búsqueda de las mejores soluciones a problemas complejos y con un alcance tan amplio que puede encontrarse desde. la programación de horarios escolares basados en ritmos. cognitivos [16], hasta la optimización de flujo de carga en los Sistemas Eléctricos de Potencia [17].. 2.2 Definición de Algoritmos Genéticos Algoritmo Genético es una técnica de búsqueda basada en la teoría de la evolución de Darwin, que ha cobrado tremenda popularidad en todo el mundo durante los últimos años. Con esta idea nace en el año 1993 la computación evolutiva, que retoma conceptos de la evolución y la genética para resolver principalmente problemas de optimización. Esta rama de la inteligencia artificial tiene sus raíces en tres desarrollos relacionados pero independientes entre sí: . Programación evolutiva, que abarca un conjunto de técnicas basadas en los mecanismos de la evolución natural, que se aplican a la resolución de problemas complejos de búsqueda y optimización de forma muy general.. . Estrategias evolutivas, que son métodos computacionales que trabajan con una población de individuos que pertenecen al dominio de los números reales, que mediante los procesos de mutación y de recombinación evolucionan para alcanzar el óptimo de la función objetivo.. . Algoritmos genéticos, que son métodos adaptativos, que generalmente usados en problemas de búsqueda y optimización de parámetros, basados en la reproducción sexual y en el principio de supervivencia del más apto.. Particularmente, los algoritmos genéticos siguiendo la definición dada por William Goldberg [18], son algoritmos de búsqueda basados en la mecánica de selección.
(39) CAPÍTULO 2. MATERIALES Y METODOS. 29. natural y de la genética natural. Combinan la supervivencia del más apto entre estructuras de secuencias con un intercambio de información estructurado, aunque aleatorizado, para constituir así un algoritmo de búsqueda que tenga algo de las genialidades de las “búsquedas humanas”. Para alcanzar la solución a un problema se parte de un conjunto inicial de individuos, llamado población, generado de manera aleatoria. Cada uno de estos individuos representa una posible solución al problema. Estos individuos evolucionan tomando como base los esquemas propuestos por Darwin sobre la selección natural, y se adaptarán en mayor medida tras el paso de cada generación a la solución requerida [19]. Los algoritmos genéticos requieren que los individuos se codifiquen en un cromosoma. Cada cromosoma tiene varios genes, que corresponden a repetitivos parámetros del problema. Tradicionalmente, para poder trabajar con estos genes en la computadora, es necesario codificarlos en una cadena, es decir una hilera de símbolos (números o letras) que generalmente va a estar compuesta de ceros y unos [20].. 2.3 Características de los Algoritmos Genéticos Las características de los AG según [14] son: . Son algoritmos estocásticos. Dos ejecuciones distintas pueden dar dos soluciones distintas.. . Son algoritmos de búsqueda múltiple, de los que se obtiene como respuesta varias soluciones. . Hacen una barrida mayor al subespacio de posibles soluciones válidas. De hecho, se considera que, de todos los algoritmos de optimización estocásticos, los algoritmos genéticos son los más exploratorios disponibles hasta el momento.. . A diferencia de otros algoritmos, cuya convergencia y resultado final son fuertemente dependientes de la posición inicial, en los algoritmos genéticos (salvo poblaciones iniciales realmente degeneradas, en que el operador de.
(40) CAPÍTULO 2. MATERIALES Y METODOS. 30. mutación va a tener mucho trabajo) la convergencia del algoritmo es poco sensible a la población inicial si ésta se escoge de forma aleatoria y es lo suficientemente grande. . Es una búsqueda paramétricamente robusta. Eso requiere decir que se ha de escoger realmente mal los parámetros del algoritmo para que no converja a una solución razonablemente buena.. 2.4 Ventajas y desventajas. respecto a otras técnicas de. búsqueda Según [14] las ventajas y desventajas de los Algoritmos Genéticos, son: Ventajas: . No necesitan conocimientos específicos sobre el problema que intentan resolver.. . Operan de forma simultánea con varias soluciones, en vez de trabajar de forma secuencial como las técnicas tradicionales.. . Cuando se usan para problemas de optimización (maximizar una función objetivo) resultan menos afectados por los máximos locales (falsas soluciones) que las técnicas tradicionales.. . Resulta sumamente fácil ejecutarlos en las modernas arquitecturas en paralelo.. . Usan operadores probabilísticos, en vez de los típicos operadores determinísticos de las otras técnicas.. Desventajas: . Pueden tardar mucho en converger, o no converger en absoluto, dependiendo en cierta medida de los parámetros que se utilicen como: tamaño de la población, numero de generaciones, etc.. . Pueden converger prematuramente que significa que el AG encuentra un óptimo local por distintas razones..
(41) CAPÍTULO 2. MATERIALES Y METODOS. 31. 2.5 Cuándo usar estos algoritmos Los algoritmos genéticos son de probada eficacia en caso de querer calcular funciones no derivables (o de derivación muy compleja) aunque su uso es posible con cualquier función. Deben tenerse en cuenta también las siguientes consideraciones: . Si la función a optimizar tiene muchos máximos/mínimos locales se requerirán. más. iteraciones. del. algoritmo. para. “asegurar”. el. máximo/mínimo global . Si la función a optimizar contiene varios puntos muy cercanos en valor al óptimo, solamente podemos “asegurar” que encontraremos uno de ellos (no necesariamente el óptimo). 2.6 Consideraciones. importantes. para. utilizar. Algoritmos. Genéticos Un algoritmo genético puede presentar diversas variaciones, dependiendo de cómo se aplican los operadores genéticos (cruzamiento, mutación), de cómo se realiza la selección y de cómo se decide el reemplazo de los individuos para formar la nueva población. En general, las características fundamentales son las descritas a continuación. 2.6.1 Tipo de representación Como se expresó anteriormente, los algoritmos genéticos, requieren que un conjunto de variables se codifique en un cromosoma. Durante los primeros años el tipo de representación utilizado era siempre binario debido a que se adapta perfectamente al tipo de operaciones y el tipo de operadores que se utilizan en la AG. Sin embargo, se empezaron a utilizar otras formas de representación en distintas aplicaciones..
(42) CAPÍTULO 2. MATERIALES Y METODOS. 32. En general, una representación ha de ser capaz de identificar las características constituyentes. de. un. conjunto. de. soluciones,. de. forma. que. distintas. representaciones dan a lugar a distintas perspectivas y por tanto distintas soluciones. Se pueden considerar cuatro tipos básicos de representaciones: . Binaria: Cada gen es un valor 0 ó 1 (Ej. 10011). . Entera: Cada gen es un valor entero. (Ej. 12 4 7 0 -5). . Real: Cada gen representa un valor real. (Ej. 10 12,5 0,46 1,75). . Gramatical: Cada gen es representado por letras y/o símbolos. Este tipo de codificación esta descrito ampliamente por [13] (Ej. H-3 B+3 B-1 B+3). 2.6.2 Población inicial Se debe tener en cuenta que las poblaciones pequeñas corren el riesgo de no cubrir adecuadamente el espacio de búsqueda, mientras que el trabajo con poblaciones de gran tamaño puede acarrear problemas relacionados con el excesivo costo computacional. En la mayoría de los estudios realizados con AG habitualmente se escoge la población inicial de forma aleatoria en la población total que está constituida por un conjunto de cromosomas, que representan las posibles soluciones del problema. En caso de no hacerlo aleatoriamente, es importante garantizar que dentro de la población inicial, se tenga la diversidad estructural de estas soluciones para tener una representación de la mayor parte de la población posible o al menos evitar la convergencia prematura hacia óptimos locales. No existe una fórmula que permita conocer el tamaño correcto a utilizar, pero se recomienda que la selección del tamaño de la población debe estar en función del problema en estudio, es decir, que no sea lo suficiente pequeño para que el resultado final no resulte un óptimo local, pero que tampoco sea tan grande para que el costo computacional no sea muy elevado..
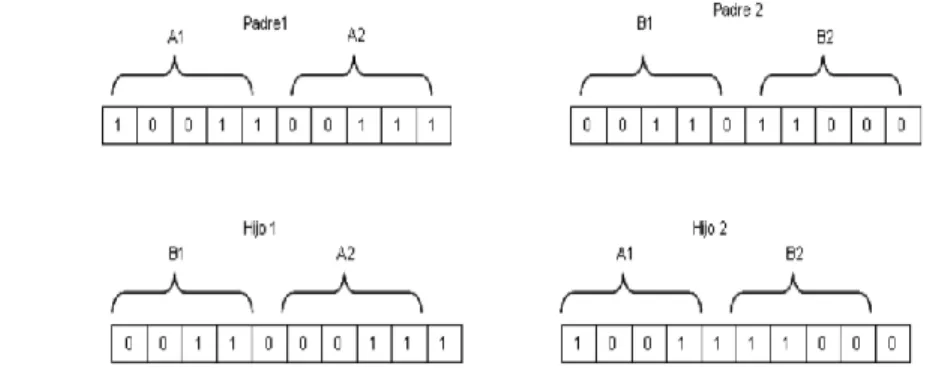
(43) CAPÍTULO 2. MATERIALES Y METODOS. 33. 2.6.3 Función de Adaptación Se utiliza una función de evaluación (llamada también función de error) para conocer qué tan bueno es un individuo, y esta función permite evaluar la calidad de los individuos en cada generación. En la mayoría de los casos se transforma la función de evaluación en una función de aptitud (fitness) para controlar la diversidad de la población y hacer que las evaluaciones siempre tomen valores positivos pues se busca maximizar el fitness.. 2.6.4 Variantes de Selección Al codificar todos los individuos de una generación, el algoritmo debe, al igual que lo hace la naturaleza, seleccionar a los individuos más calificados, mejor adaptados al medio, para que tengan mayor oportunidad de reproducción. De esta forma se incrementa la probabilidad de tener individuos “buenos” (con alta calificación) en el futuro. Un AG puede utilizar muchas técnicas diferentes para seleccionar a los individuos que deben copiarse hacia la siguiente generación, a continuación se describen las técnicas más usadas y se brinda. una breve. descripción de cada una de las mismas. . Selección Aleatoria. Se genera dos números aleatorios. entre 0 y el. tamaño de la población. Será escogido como padre, aquel individuo cuya posición dentro del vector población se corresponda al número aleatorio generado. . Selección por Ruleta. Los individuos son evaluados por su función de adaptación y se les asigna una proporción equivalente a ella en un intervalo de probabilidad acumulada. A mayor valor de fitness, mayor proporción tendrá asociada y mayor probabilidad de ser elegido como padre.. . Selección por Torneo. Este tipo de selección escoge al azar m individuos de la población, de ellos será elegido como padre el individuo que tenga el mayor valor de la función fitness. Este procedimiento se realiza dos veces, uno para cada padre..
(44) CAPÍTULO 2. MATERIALES Y METODOS. 34. 2.6.5 Tipos de Cruce Una vez seleccionados los individuos, éstos son recombinados para producir la descendencia que se insertara en la siguiente generación. Tal y como se ha indicado anteriormente el cruce es una estrategia de reproducción sexual. Su importancia para la transición entre generaciones es elevada, por tanto las tasas de cruce con las que se suele trabajar rondan el 70% y 80%. Entre los modos de cruces que existen, se pueden observar generalmente: . Cruce de Un Punto. Cada vez seleccionados dos padres se cortan sus cromosomas por un punto determinado para generar dos segmentos diferenciados en cada uno de ellos la cabeza y la cola. Se intercambian las colas entre dos individuos para generar los nuevos descendientes, de esta manera ambos descendientes heredan información genética de los padres. Véase la figura 2. Donde se representa lo anterior.. Figura 2. Cruce de Un Punto . Cruce Uniforme. Para cada bit del primer descendiente se decide, según una cierta probabilidad uniforme, de cual progenitor heredará su. valor. de. posición.. El. segundo. correspondiente gen del otro progenitor.. descendiente. recibe. el.
(45) CAPÍTULO 2. MATERIALES Y METODOS. 35. 2.6.6 Tipos de Mutación Cuando se dice en la naturaleza que hay una mutación se refiere a una alteración accidental en el código genético de los seres vivos. El objetivo de su uso en los AG es generar nuevos individuos que exploren regiones del dominio del problema que probablemente no se han visitado aún. Esta exploración no presupone conocimiento alguno, es decir no es sesgada. Se buscan aleatoriamente nuevas soluciones posibles que quizá superen las encontradas hasta el momento. Esta es una de las características que hacen aplicables a los AG a una gran variedad de problemas: no presuponer conocimiento previo acerca del problema a resolver ni de su dominio, no solo en la mutación sino en el proceso total.. 2.6.7 Manejo de individuos infactibles Cuando se trabaja con AG en algunos casos los operadores genéticos pueden generar individuos infactibles, lo cual se verifica al decodificar un cromosoma y evaluarlo en las restricciones. Para manejar este tipo de inconveniente se proponen las siguientes técnicas [14]: . Estrategia de rechazo: Rechaza los cromosomas infactibles generados en el proceso evolutivo. Esta estrategia tiene como desventaja que si el problema de estudio requiere una cantidad considerable de restricciones, se pueden rechazar individuos que están cercanos a la mejor solución por incumplir una de ellas. En la práctica es la opción más utilizada por ser la más simple de implementar.. . Estrategia de Modificación de Operadores Genéticos: Consiste en diseñar una representación específica del problema haciendo uso de operadores genéticos especializados. Esto permite que la búsqueda sea confinada a la región factible.. . Estrategia de Penalización: Son técnicas que permiten movimientos a través de las regiones infactibles del espacio de búsqueda con la finalidad de obtener mayor rapidez en la optimización. Consideran soluciones infactibles en la búsqueda genética. La técnica más utilizada para solventar.
(46) CAPÍTULO 2. MATERIALES Y METODOS. este tipo de problemas de los AG es Penalty.. 36 Esta técnica permite. transformar un problema restringid en un problema irrestricto penalizando soluciones infactibles. Añade un término penalty a la función de adaptación por cualquier violación a las restricciones.. 2.6.8 Reemplazo de la población y condición de parada Cada vez que se aplica el operador de cruce, se crean un número de nuevos individuos (descendencia) que se han de integrar en la población para formar la siguiente generación. Esta operación se puede hacer de diversas formas, pero en general existen tres métodos fundamentales para realizar el remplazo: . Cuando el número de individuos llega a un cierto valor, se elimina un subconjunto de la población conteniendo a los individuos peor adaptados.. . Cada vez que se crea un nuevo individuo, en la población se elimina el peor adaptado para dejar en su lugar a este nuevo individuo.. . Cada vez que se crea un nuevo individuo, en la población se elimina aleatoriamente un individuo, independientemente de su adaptación.. . Se crea una población temporal con los nuevos individuos, esta se fusiona con la población anterior y de allí se escogen los mejores individuos para que pasen a la siguiente generación.. En cuanto al criterio de parada, generalmente viene determinado por criterios a priori sencillos, como un número máximo de generaciones o un tiempo máximo de resolución, o más eficientemente, por estrategias relacionadas con indicadores del estado de evolución de la población, como por la pérdida de diversidad dentro de la población o por no haber mejora en u cierto número de iteraciones, siendo por lo general una condición mixta lo más utilizado, es decir, limitar el tiempo de ejecución a un número de iteraciones y tener en cuenta algún indicador del estado de la población para considerar la convergencia antes de alcanzar el número de iteraciones fijados..
(47) CAPÍTULO 2. MATERIALES Y METODOS. 37. 2.7 Algoritmo Genetico Multiobjetivo En ciencias e ingeniería se presentan, en bastantes ocasiones, problemas que requieren la optimización simultanea de más de un objetivo (optimización multiobjetivo [21] [22]). Habrá que optimizar por tanto una función de la forma , donde. y. . Pero el problema está en que. normalmente no existe un elemento de S que produzca un óptimo de forma simultánea para cada uno de los k objetivos que componen f. Esto se deberá a la existencia de conflictos dentre objetivos, que harán que la mejora de uno de ellos dé lugar a un empeoramiento de algún otro. Pensemos por ejemplo en el caso de un avión con dos objetivos que fueran su velocidad y el ahorro de combustible: un aumento de la velocidad traería consigo una disminución del ahorro. Habrá que llegar por tanto a una situación de compromiso en la que todos los objetivos sean satisfechos en un grado aceptable, desde el punto de vista de diseño. A diferencia de los problemas de optimización con un único objetivo, el concepto de óptimo es ahora relativo y será necesario decidir de alguna forma cuál es la mejor solución (o cuáles son las mejores soluciones) al problema. En términos matemáticos, el problema de optimización multiobjetivo, puede establecerse de la siguiente forma: Encontrar un vector. , que satisfaga las m restricciones: (1). y las p restricciones: (2) Para optimizar la función vectorial: T. Donde x = [x1,x2,…,xn]T es el vector de variables de decisión. En otras palabras, se desea determinar la solución particular. , del. conjunto S formado por todos los valores que satisfacen (1) y (2), que dé lugar a los valores óptimos para todas las funciones objetivo. Pero como ya se ha.
(48) CAPÍTULO 2. MATERIALES Y METODOS. 38. comentado, no existe normalmente una solución que optimice de forma simultánea todas las funciones objetivo.. 2.7.1 Métodos. de. solucion. de. los. algoritmos. genéticos. multiobjetivos Para tratar el problema comentado del conflicto entre objetivos se han utilizado diversos métodos: . Métodos basados en el concepto de eficiencia de Pareto.. . Métodos basados en la combinación de objetivos. Dentro de estos métodos se puede mencionar el método de la suma ponderada, en el que se optimizará. el. valor. obtenido. mediante. la. suma. de. los. valores. correspondientes a los distintos objetivos, multiplicados cada uno por un coeficiente de peso. Estos coeficientes de peso establecerán la importancia relativa de cada objetivo. El problema de optimización multiobjetivo se transforma así en otro de optimización escalar, que para el caso de la minimización será de la forma. ∑ Donde Existen. es el coeficiente de peso correspondiente al objetivo i. variantes. del. método. anterior,. como. el. método. de. la. programación por metas, en el que se establece una meta para cada objetivo y lo que se suma ahora (multiplicado por el correspondiente coeficiente) es la distancia de cada objetivo a su meta. Para un caso de minimización sería. ∑. |. |.
(49) CAPÍTULO 2. MATERIALES Y METODOS. 39. Donde Mi representa la meta del i-ésimo objetivo. . Métodos basados en la asignación de prioridades. Estos métodos tienen en común que establecen unas prioridades entre los distintos objetivos, teniéndose en cuenta su importancia relativa durante el proceso de optimización.. Todos los métodos anteriores han sido utilizados por distintos autores en combinación con los algoritmos evolutivos, que se han mostrado como una herramienta muy adecuada para resolver este tipo de problemas. Estos métodos pueden englobarse en lo que se conoce como MOEA[23][24] (Multi-Objective Evolutionary Algorithms, en español algoritmos evolutivos multiobjetivo).. 2.8 Caracteristicas del algoritmo genético implementado en este trabajo En el desarrollo de la aplicación presentada en este trabajo se utilizó el NSGA II (Non-Dominated Sorting in. Genetic Algorithms). [25] con las siguientes. características: . El tipo de representación escogida fue el real.. . Se determinó usar una población de 1000 individuos y 500 generaciones. para lograr alcanzar un buen número de soluciones válidas.. . Se establecieron nueve variables de diseño.. . Se fijó en dos el número de objetivos a evaluar.. . Fue creado un vector con los límites establecidos para las variables diseño. . La población se inicializó usando una distribución uniforme y aleatoria de valores dentro de los establecidos en el vector límite.. . Para este. caso se utilizó. la selección por torneo y el cruzamiento. intermedio. . La variante de mutación escogida fue la gausiana.. . El criterio de parada será el número de generaciones..
Figure
![Figura 1.1. Modelo circuital doble jaula empleado por [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/7323054.452502/21.918.280.684.464.609/figura-modelo-circuital-doble-jaula-empleado.webp)
![Figura 1.2. Modelo circuital doble jaula empleado por [4]](https://thumb-us.123doks.com/thumbv2/123dok_es/7323054.452502/23.918.279.682.157.308/figura-modelo-circuital-doble-jaula-empleado.webp)
![Figura 1.3. Modelo circuital doble jaula empleado por [13]](https://thumb-us.123doks.com/thumbv2/123dok_es/7323054.452502/25.918.187.720.105.261/figura-modelo-circuital-doble-jaula-empleado.webp)
+7

Documento similar
En la Figura 3.7 se comparan los resultados de los métodos de cálculo para la obtención de los parámetros eléctricos de un motor trifásico de inducción con respecto a las señales
