Diseño y simulación de un controlador de posición basado en modos deslizantes para un robot tipo Scara paralelo
Texto completo
Figure
![Figura 1.3. Robots DexTAR desarrollado por Mecademic [4].](https://thumb-us.123doks.com/thumbv2/123dok_es/3169149.577999/14.918.226.712.124.418/figura-robots-dextar-desarrollado-por-mecademic.webp)
![Figura 1.6. Área de trabajo del robot Scara Paralelo, basado en [3].](https://thumb-us.123doks.com/thumbv2/123dok_es/3169149.577999/15.918.288.643.787.1049/figura-área-trabajo-robot-scara-paralelo-basado.webp)
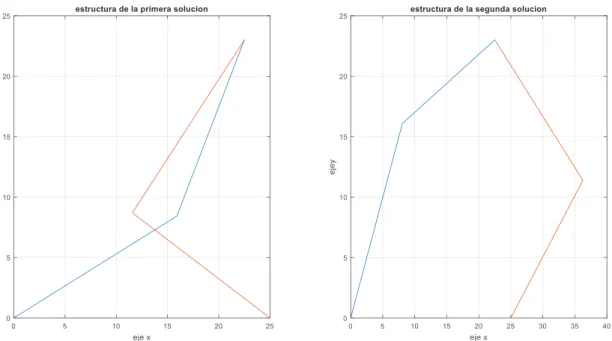
![Figura 1.12. Conjuntos de posiciones alcanzables por robot Scara paralelo para cada uno de los cuatro modos de trabajo [4]](https://thumb-us.123doks.com/thumbv2/123dok_es/3169149.577999/19.918.320.628.121.560/figura-conjuntos-posiciones-alcanzables-scara-paralelo-cuatro-trabajo.webp)





Documento similar
Para la simulación se utiliza el controlador IMC, sintonizado utilizando el modelo de 3º orden y para la planta utilizamos el modelo de 5º orden, en
Al no observar una significante relación con el valor de p=0,165 (p>0,05) y correlación muy baja de r=0,071, se considera que no existe relación significativa entre
En el control tradicional por pulsos de voltaje (sección 4.2) se tiene que la posición depende siempre del tamaño de paso donde es imposible posicionar en un punto intermedio
Por lo que se presenta una propuesta de controlador inteligente para la posición angular de un panel solar, en donde la señal de referencia del controlador se obtiene de la salida
La tabla 4 presenta los ´ındices ISE y TV para cada uno de los controladores en la prueba de cambio de distancia entre el robot y la pared donde el desempe˜no del controlador
Con este componente se ha implementado la lógica de funcionamiento del sistema de frenado que se basa en una doble condicionalidad, que la velocidad seleccionada con
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
De acuerdo con la bibliograf´ıa existen m´etodos de dise˜no de controladores homog´eneos tal que se garantice estabilidad en tiempo finito, sin embargo, de manera general no
