Control vectorial : diseño e implementación
93
0
0
Texto completo
(2) Control Vectorial. Diseño e Implementación.. ,. INDICE 3. l. INTRODUCCIÓN l. ESTADO DEL ARTE. 3. 2. ANTECEDENTES. 4. 3. OBJETIVOS Y METAS. 4. 4.ALCANCESDELPROYECTO. 5. 11. MARCO TEÓRICO. 6. l. TRANSFORMACIONES DE CLARKE Y P ARK. 6. 2. MODELO DINÁMICO DE UN MOTOR DE INDUCCIÓN. 9. 3. CONTROL VECTORIAL ORIENTADO AL FLUJO DEL ROTOR. 14. 4. MODELO VECTORIAL DE UN INVERSOR. 18. 5. PWM POR BANDA DE HISTÉRESIS. 20. 6. DISTORSIÓN ARMÓNICA. 22. 28. 111. DISEÑO l. CONTROL VECTORIAL Y PWM. 28. 2. CONTROL DE FLUJO Y VELOCIDAD. 33. 3. RESPUESTA GLOBAL DEL SISTEMA. 40. - 1-.
(3) Control Vectorial. Diseño e Implementación.. IV. RESULTADOS. 44. l. ACONDICIONAMIENTO DE SEÑALES DE CORRIENTE. 44. 2. SECUENCIA DE SEIS PASOS. 47. 3. PWM BANDA DE HISTÉRESIS. 49. 4. CONTROL VECTORIAL. 53. 5. ANÁLISIS DEL CONTENIDO DE ARMÓNICOS. 57. V. CONCLUSIONES. 62. VI AGRADECIMIENTOS. 64. VII. REFERENCIAS. 66. VIII. ANEXOS. 68. l. PARÁMETROS DEL MOTOR. 69. 2. DESCRIPCIÓN DEL EQUIPO. 72. 3. GRAFICAS DE DISTORSIÓN ARMÓNICA PWM. 74. 4. ACTIVIDADES. 76. 5. PROGRAMACIÓN. 77. -2-.
(4) Control Vectorial. Diseño e Implementación.. l. INTRODUCCIÓN Hasta mediados del siglo pasado, la elección del actuador eléctrico utilizado en un proceso industrial era una decisión que caía primeramente en la pregunta: ¿Corriente alterna o directa? La respuesta radicaba directamente en las características del proceso en donde se ponía en una balanza si es que se necesitaba control preciso sobre la máquina o se necesitaba mantener costos bajos. Las ventajas que nos ofrece un motor de inducción sobre uno de corriente directa son muchas. La ausencia de escobillas nos da, en general, menos pérdida de energía y por ende mayor eficiencia, menor tamaño, menor mantenimiento y, a causa de esto, mejores resultados económicos. Inclusive, es sólo posible utilizar este tipo de motor en ambientes hostiles, dónde la seguridad es un aspecto imposible de dejar atrás. Sin embargo, la complejidad que el motor de inducción representa hacen de su control algo difícil de realizar, comparado con la facilidad con la que se controla un motor DC.. El control de par, velocidad y posición en máquinas DC es fácil de. implementar debido a su condición estática y no alterna como sucede en las máquinas sincrónicas. El control escalar de motores de inducción consiste en variar la frecuencia y la magnitud del voltaje de entrada del motor, con lo que es posible controlar la velocidad del motor en estado estacionario, por lo que el transitorio de velocidad no es controlado. Esto aunado a sus problemas a bajas velocidades, reduce su campo de acción a regulación de velocidades moderadas a altas.. 1. ESTADO DEL ARTE Con el desarrollo de nuevas técnicas y dispositivos de procesamiento, ha sido posible la abertura de campo de investigación sobre nuevas técnicas de control. -3-.
(5) Control Vectorial. Diseño e Implementación.. aplicadas a este tipo de máquinas eléctricas, en las que la velocidad de procesamiento es una parte no importante, sino necesaria para su funcionamiento. Sin duda, el estado del arte en la actualidad se ha enfocado en desacoplar las variables de flujo, par, corriente y velocidad en un motor de inducción dándole un enfoque estático, convirtiendo cantidades corriente alterna (AC) en directa (DC) mediante transformaciones lineales con marcos referenciales rotatorios. Este desacople puede realizarse mediante técnicas de variable de estado y más comúnmente con los métodos vectorial y control directo del par. Una vez realizado el desacople, es posible considerar el motor como una máquina DC y gozar de las ventajas en control que esto representa.. 2. ANTECEDENTES Como antecedentes de este trabajo están las referencias [1], [3] y [4]. El trabajo hecho en control vectorial [3], logró obtener, en simulación, un controlador PI de velocidad cuya salida se controlaba a semejanza de un motor DC e implementaron una secuencia de seis pasos. En este caso se utilizó Control Inteligente para estimar los parámetros necesarios para llevar a cabo el algoritmo de control. La referencia [4] trata sobre Control Directo del Par, que posee las mismas ventajas que el control vectorial y analiza el motor desde un punto de vista dinámico.. 3. OBJETIVOS Y METAS El objetivo principal de este proyecto es desarrollar un sistema de control para un motor de inducción basado en el desacople del flujo y el par por medio de vectores espaciales, técnica conocida como control vectorial. Durante el semestre pasado [1 ]se realizaron las siguientes actividades: Actividades teóricas. •. Transformaciones entre marcos referenciales.. •. Modelo dinámico del motor.. •. Modelo vectorial de un inversor.. •. Distorsión armónica.. -4-.
(6) Control Vectorial. Diseño e Implementación.. Actividades de simulación. •. Transformaciones entre marcos referenciales.. •. Modelo dinámico del motor.. •. Secuencia de seis pasos.. •. Modulación del ancho de banda por banda de histéresis.. Actividades Prácticas. •. Encontrar los parámetros del motor de inducción.. •. Programación de una secuencia de seis pasos.. •. Análisis de armónicas de voltaje y corriente.. Con estas actividades es posible plantear los objetivos específicos para este semestre. Los objetivos para este semestre son: Teoría. •. Control vectorial orientado al flujo del rotor. o. Estimación del flujo del rotor. Magnitud y dirección.. Diseño y simulación. •. Estimación del flujo del rotor.. •. Regulación del flujo.. •. Control de velocidad.. Implementación. •. Acondicionamiento de señales de corriente. (Interfaz). •. Modulación del ancho de banda por banda de histéresis.. •. Estimación de flujo. Magnitud y dirección.. •. Control vectorial de la velocidad y regulación del flujo.. •. Análisis de armónicas de voltaje y corriente.. 4.ALCANCESDELPROYECTO Este proyecto tiene un gran potencial, ya que cuando se encuentre implementado el control vectorial, se podrá mejorar el desempeño utilizando diversas técnicas de control avanzado, así como agregar nuevos requerimientos de ahorro de energía, como la regeneración de energía en el frenado.. -5-.
(7) Control Vectorial. Diseño e Implementación.. 11. MARCO TEÓRICO El control vectorial se basa en teoría de campos electromagnéticos rotatorios, en. donde. se. centran. las. bases. para. visualizar. éstos. como. campos. electromagnéticos ortogonales y estáticos respecto a un marco de referencia rotatorio. Con esto, es posible visualizar al motor de inducción con cantidades DC fasoriales, que giran junto con su marco de referencia. De esta manera, el control se puede implementar desde el marco rotatorio en cantidades DC y se pueden transformar las señales de control al marco estático trifásico.. 1. TRANSFORMACIONES DE CLARKE Y PARK El marco rotatorio fasorial es descompuesto en dos ejes ortogonales reales llamados los ejes dq.. De esta manera es indispensable desarrollar las. transformaciones necesarias para obtener cantidades trifásicas con respecto al marco dq y viceversa.. 1.1 TRANSFORMACIÓN DE CLARKE La primera necesidad es transformar las cantidades trifásicas estáticas a cantidades estáticas en un marco ortogonal llamado el marco. ap.. Is. b. a. a. e. Figura 1-1 Marco referencial ortogonal af] y marco trifásico abe.. -6-.
(8) Control Vectorial. Diseño e Implementación.. Analizando la Figura 1-1 y aplicando trigonometría se pueden obtener las siguientes ecuaciones. (1.1a) (1.1b) Si la carga está balanceada: (1.1c) (1.1d) Podemos ver las ecuaciones 1.1 de forma matricial utilizando la ecuación de la carga balanceada (1.1 c).. (:}{i]. Te.·. =. m=I',-üJ. o 11 r-1\2 -J312 -1/2 --J3/2 -1/2 -1/21 -J312 --Ji 12 1/2 1/2. (1.2a). (1.2b). Para llevar a cabo nuestro análisis es necesario tener bloques de esta transformada en Matlab Simulink.. i.alf.a. ialfa. : ibet:a. ic I>. Alf.aBet.a/1.abc. 2. }------i. ibet.a. G.iin5. Figura 1-2. Transformación af]/abc. -7-.
(9) Control Vectorial. Diseño e Implementación.. 1.2 TRANSFORMACIÓN DE PARK. ap,. Una vez transformadas las cantidades al marco. el cual es un marco. estacionario ortogonal, es necesario pasar al marco rotatorio dq. Para esto es necesario definir un ángulo p entre estos marcos, de manera que el marco rota a una velocidad relativa al marco estático de. dp. (J)h. (1.3). =-. dt. Analizando la Figura 1-3 y aplicando trigonometría se pueden obtener las siguientes ecuaciones.. iª. = proya(id) + proya(iq) = cosp · id - senp · iq. (1.4a) (1.4b). Is q d. a. Figura 1-3 Marco referencial rotatorio dq y marco estacionario. a/3. Podemos ver las ecuaciones 1.4 de forma matricial.. -[cos p - senp] senp cosp. Tp -. Tp. _1 - [. -. cos p senp] -senp cosp. (1.5a). (1.5b). La Figura 1-4 muestra la transformación de Park, en donde Teta es el ángulo p entre los marcos dq y. ap.. -8-.
(10) Control Vectorial. Diseño e Implementación.. Teta ialfa. id iq. ibeta id. DQ/AlfaBeta Produol1. •• Figura 1-4 Transformación dqla/J. 2.. MODELO DINÁMICO DE UN MOTOR DE INDUCCIÓN. El motor de inducción puede ser modelado de varias maneras.. Los. controladores escalares utilizan un modelo en estado permanente del motor. Por lo tanto, con este tipo de controladores no es posible mejorar el desempeño del motor en los estados transitorios. El control vectorial tiene como objetivo modificar el estado del motor de inducción tanto en estado permanente como en transitorio. De esta manera es necesario analizar el motor mediante un modelo que tome en cuenta el estado transitorio del mismo.. 2.1 VECTORES ESPACIALES Los vectores espaciales se utilizan para representar las cantidades intrínsecas del motor como lo son los voltajes, corrientes y flujos. Se utiliza esta representación porque pueden ser fácilmente manipulados para cambiar de marco referencial. Inicialmente se definen los vectores espaciales de corriente, voltaje y flujo: -. 2. i =id+ jiq -. v = vd + jv. q. = -(ia + aib + a\). (2.1). 3. 2. = -(v 3. 0. 2 +avh +a vJ. (2.2) (2.3). En donde a= exp(j27Z' /3) y se utilizó (1.2) para obtener los vectores con respecto a las cantidades abe.. -9-.
(11) Control Vectorial. Diseño e Implementación.. 2.2 ECUACIONES DEL MOTOR EN UN MARCO ROTATORIO Las ecuaciones del motor en los marcos del rotor y el estator son: y. sq. -_,- - ~-'R +-. .\' dt. d!f::. (2.4). -, - ~'R, +-dlf:. (2.5). V, -Is. V, - lr. dt. (2.6) (2.7) 4. Figura 2-1 Vectores espaciales estatóricos f l. Como se observa en la Figura 2-1, una cantidad, por ejemplo el flujo del estator. (\J,5), puede representarse mediante un vector espacial, que para el marco de referencia d-q estacionario es de la forma. ,;;:: =l lfls I elP,. (2.8). Ese mismo vector, en un marco rotatorio se expresa (2.9). -;;,' =I-;;;- 1eiP,e-JP, =-;;,"'e-JA. 't' .\. 'f'. (2.1 O). 't' s. !i'. Por lo tanto, es posible realizar un cambio de marco de referencia al multiplicar el vector original por un vector unitario que rote el vector con el ángulo entre ambos marcos. Es posible reflejar las ecuaciones (2.4) a (2.7) a un marco rotatorio k que rota a una velocidad rok y cuyo ángulo medido desde el marco del estator es ek. Separando las componentes reales e imaginarias y aplicando (2.1) a (2.3) se llega a las siguientes expresiones:. V,·dJ [isdJ d [lflsdJ +mk [ V,q = R,.· . +dt 1.//.,q 1sq. - 1O -. [º -IJ[l//_,·JJ I. O. 1/f_,c¡. (2.11a).
(12) Control Vectorial. Diseño e Implementación.. J+ {wk _ ú)m {t O - IJ(l.f/ rd J (~"rq J= R,(i:"l,q J+ !!._(l.f/,d dt l.f/,q 1 l.f/,q. (2.11b). Ü. l.f/.,d l.f/sq l.f/,d lfl rq. o Lm o o L., o Lm = Lm o L, o o Lm o L, L,. isd (q i,d. (2.12). i,q. Es posible observar que para cada ecuación 2.11, existen tres componentes principales de caída de tensión. La primera es producida por las pérdidas en los devanados, la siguiente corresponde a una FEM inducida por el cambio alterno de los flujos y el tercero es una FEM producida por el movimiento relativo entre el marco y el vector de flujo, es decir, se produce porque al rotar el marco k, se lleva a cabo corte de líneas magnéticas y se induce la FEM. Esta tercera cantidad desaparece si se fija la velocidad del marco k a la velocidad con la que gira el flujo, ya sea del estator o el rotor. El par electromagnético se puede obtener mediante varias expresiones, en donde p es el número de polos del motor. (2.13a) p L (· . . . ) Tm = 2 m l.,i,d - l.,dlrq. (2.13b). La ecuación dinámica de Newton se puede escribir: (2.14) Finalmente, es posible modelar el comportamiento de un motor de inducción utilizando las ecuaciones (2.11) a (2.14) y construirlo en Simulink (Figura 2-2) En el sistema de la Figura 2-2 se observa como entradas el voltaje trifásico y el par de carga. Como salida están las corrientes de rotor y estator, el par electromagnético, la velocidad y los flujos en dq.. - 11 -.
(13) Control Vectorial. Diseño e Implementación.. Como primera instancia se escogió un marco de referencia estacionario, es decir wk=O en (2.11 ). Esto facilita los bloques del modelo, pero no ayuda al control, ya que los flujos y corrientes del sistema serán alternos.. Doble Clid< para cargar parametros y condiciones iniciales.. PHl_dq. Torque de Carga. Scope. Motor de Inducción. Doble Clid< para editar para metros y condiciones iniciales.. Figura 2-2. Modelo en Simulink del Motor de Inducción.. En la Figura 2-3 se muestra que los voltajes trifásicos se transforman al marco. af3 y después entran al bloque del estator. De los bloques de estator y rotor (ec 2.11) se obtienen los flujos y de éstos las corrientes (ec 2.12).. Vabc PHls_dq abe/alfabeta. ialfa. ia ib. ibeta. Estator. ic. Alfa B eta/i a b c2. Figura2- 3. Bloques que conforman el sistema.. - 12 -.
(14) Control Vectorial. Diseño e Implementación.. Se obtuvieron los parámetros del motor que se utilizará (Anexo 1) y con estos se simuló el sistema (Figura 2-3). Las gráficas de corrientes (A), par (Nm) y velocidad (rpm) con respecto al tiempo (s) obtenidas se muestran en la Figura 2-4.. :~~v, .;. ;~h 1 l ~J ; ¡, 1 J 1. 1. 1.5. 2. ! ,.. O. 0.5. 1. 1.5. 2. O. 0.5. 1. Figura 2-4. Gráficas de corrientes, par y velocidad. 2.3 FLUJO DE ROTOR Y CORRIENTES DE ESTATOR COMO VARIABLES DE ESTADO El modelo obtenido en la sección anterior utiliza como variables de estado los flujos de la máquina en el rotor y el estator, lo cual es fácil de traducir en bloques de Matlab. Para el análisis de control, modificaremos estas ecuaciones logrando un modelo con el flujo del rotor y la corriente de estator como variables de estado. De la ecuación (2.12) es posible obtener:. J. L i a-= 1-__M_ ' L,Ls. f//_,J J LM -1 , ( 1/1.,q =,P, =a-Ls · ., +-1/ L,. l =-1 ,. L lfl, r. (2.15). _ LM l L _,. (2.16). r. Sustituyendo estos resultados en (2.11) obtendremos las ecuaciones buscadas.. -d,P, = dt. R, _ +LmR, - - l _- (O) L, 'f' r L, ., k. -~111. )M111_. -0). m. 'f'. r. (2.17). (2.18). - 13 -.
(15) Control Vectorial. Diseño e Implementación.. 3. CONTROL VECTORIAL ORIENTADO AL FLUJO DEL ROTOR Las ecuaciones de la sección anterior modelan el motor de inducción en un marco referencial que se mueve a cualquier velocidad angular. El control vectorial aprovecha el hecho de que si el marco referencial dq se mueve a la misma velocidad que los campos magnéticos (velocidad síncrona), los flujos y corrientes en ese marco serán de tipo DC. Normalmente, se fija el eje d del marco para que coincida con algún vector de flujo, ya sea del estator, rotor o entrehierro.. 3.1 DESARROLLO DE LAS ECUACIONES Para nuestro análisis orientaremos el marco referencial al flujo del rotor (Figura 3-1) lo que implica que sólo habrá proyección de este flujo en el eje d ( lf/rq = O).. q. d. a Figura 3-1. Marco dq orientado con el Flujo Rotórico. De esta manera la velocidad del marco dq estará dada por la velocidad de rotación del flujo del rotor, es decir, la velocidad síncrona.. dp. OJk. (3.1). = -dt = OJe = OJ m + SOJe. Si este resultado lo llevamos a (2.17) se cancela el término debido a la FEM de movimiento relativo entre flujo y marco (debido a que estos se mueven a la misma velocidad) y obtenemos dos expresiones:. d,p,. -. dt. 1 _ +L l - (O) T 't' r T s k. =--///. r. 111. r. - 14 -. -0). m. )Mlll_ 't' r. (2.17).
(16) Control Vectorial. Diseño e Implementación.. Con drp, =. (\V¿, J y. sw, = "'• - "'., = "'· - "'"' obtenemos: T = L,. '. SOJ. L. i_.q. T,. lfl,d. (3.2a). (3.2b). =___!!!__·_. e. Rr. La ecuación (3.2a) indica que el flujo de la máquina estará sólo en función de la corriente de estator paralela a él (/d)- Sustituyendo 1//rq = O en (2.13) podemos encontrar una expresión para el par en función del flujo y la corriente de estator ortogonal a él (/q).. T - pLm e -. 2. L. lfl,d. i. .sq. (3.2c). r. Estas dos ecuaciones (3.2a y c) tienen la misma forma a las que rigen el comportamiento del motor de corriente directa. En este caso los campos magnéticos son estáticos por naturaleza. En el caso del motor de inducción, el control vectorial nos permite posicionarnos en un marco rotatorio desde el cual los campos de la máquina parecen estáticos. Esto sólo resulta si la velocidad del marco es igual a la de los campos, es decir, la velocidad síncrona. En nuestro análisis, conocer esta variable será, pues, de vital importancia y tendremos acceso a ella por medio de las ecuaciones (3.1 y 2b). Así mismo, las ecuaciones que gobiernan la dinámica eléctrica del motor de inducción desde un marco rotatorio, son parecidas a aquellas para el motor de corriente directa (circuito RL con perturbación de fem). Es posible encontrar una expresión para las corrientes de estator y observar un circuito RL con perturbaciones debidas a la fem. (3.2d). - 15 -.
(17) Control Vectorial. Diseño e Implementación.. 3.2 SISTEMA RESULTANTE De esta manera, podemos construir un modelo del motor de inducción utilizando las ecuaciones anteriores: T dlfl,J + - L . r lfl,J - m 1.,J dt dOJ. Tm -T.= J-'!!... / dt + Bmm. con. (3.3a) (3.3b). Este modelo es igual al de un motor de corriente directa y es fácil encontrar controladores que regulen tanto el flujo como la velocidad utilizando las corrientes de estator dq como entradas. Es posible observar que se deja fuera la ecuación (3.2d), esto se debe a que se realizará el control directo de la corriente mediante una técnica llamada PWM por banda de histéresis, la cual se estudia a detalle en las secciones siguientes. Finalmente es posible encontrar la posición angular del flujo (y por ende, del marco rotatorio dq) mediante:. dp. -d{ = O), = O)m + SOJe. (3.3c). e. 3.3 ESQUEMA DE CONTROL VECTORIAL Con estas ecuaciones es posible realizar el esquema de control básico que se muestra en la Figura 3-2. Los controladores de Flujo y Velocidad tienen como salida un comando de corrientes estatóricas dq, las cuales son transformadas al marco a~ mediante Park utilizando la posición angular del marco dq. Luego, son transformadas al marco trifásico mediante Clarke y controladas con una técnica de modulación y un inversor. Con esto podemos observar que el control vectorial es esencialmente la herramienta que nos permite obtener corrientes trifásicas de referencia de dos corrientes ortogonales, una paralela y otra perpendicular al flujo, que nos permitirán controlar el motor de inducción de una manera desacoplada. Así que, su principal tarea es estimar el flujo del rotor, tanto su magnitud como su. - 16 -.
(18) Control Vectorial. Diseifo e Implementación.. orientación; siendo ésta de crítica importancia para la transformación de las cantidades de referencia del marco rotatorio al marco estático trifásico.. lsd'. e. -jP 1.2b (T. Clalke). p. -1<. ªºª. Sistema PWM-lnversor. Motor. labc'. Fir (isd) _..._ls~dq"--1. p( Fir,lsd). 3 1.5a (T. Palk) 1.2a (T. Clalke). 3.2a. 3.2b. labc. Figura 3-2. Bloque de Control Vectorial Básico. El bloque de estimación del flujo (Figura 3-3) sigue las ecuaciones (3.2,3). En primera instancia se calcula la magnitud del flujo. A partir de este valor se obtiene la velocidad de deslizamiento, que sumada a la velocidad del rotor resulta la velocidad síncrona. La orientación del flujo será igual a la integral con respecto al tiempo de la velocidad síncrona.. 1/Tr. PHlrd lntegrator. lntegrator1. Product1. p"Lm/(2"Lr). PHlrd. Figura 3-3. Estimador de Flujo del Rotor.. - 17 -.
(19) Control Vectorial. Diseño e Implementación.. 4. MODELO VECTORIAL DE UN INVERSOR El inversor es un dispositivo de potencia que convierte energía eléctrica DC a AC, utilizando dispositivos semiconductores que conmutan las líneas entre el voltaje positivo y el negativo (Figura 4-1 a). De esta manera, el voltaje de fase dependerá no nada más del valor del bus DC del inversor, sino de los voltajes que existan en las otras líneas (Figura 4-1 b).. 4. Figura 4-1 El inversor (a) conmuta las líneas entre V+ y V- (b). l l. Se modeló idealmente el inversor en Simulink, por lo que no se toma en cuenta las. pérdidas en. los. ni. semiconductores. la. dinámica.. Las. pérdidas. no. contempladas, serán compensadas por el controlador.. rs<i>i-l""""l _______ .-- --·-·-------- ___.J. ~··~ -· ~. r:~--·. Inversor. _~. - 1. lris------- ------------ ------------ __¡ ~ ~~ ~-. Con:d:o1nl1. Figura 4-2. Bloque de Inversor. 4.1 VECTORES ESPACIALES DE VOLTAJE EN UN INVERSOR Dependiendo del estado de los semiconductores del inversor, se obtendrá un vector de voltaje como en (2.2).. -. V= Vd+ }vq. 2. = -(v + avh + a 2vJ 3. 0. (2.2). La tabla 4-1 concentra los valores para cada combinación de los pulsos en el inversor Pabc· Se observa que existen dos combinaciones que producen voltajes. - 18 -.
(20) Control Vectorial. Diseño e Implementación.. nulos, (000) y (111 ). Es posible graficar estos vectores en un marco DQ (Figura 43) y observar la posición de cada uno de ellos. q. Tabla 4-1. Vectores de Voltaje.. Va. o o o O O 1 O 1 O O. 1. 1. 1. O O. 1 1. O 1. 1 O. 1. 1. 1. o. vb o. Ve. o. - 1/3 - 1/3 2/3 - 1/3 2/3 - 1/3 - 2/3 1/3 1/3 2/3 - 1/3 - 1/3 1/3 - 2/3 1/3 1/3 1/3 - 2/3. o. o. o. o. o. - 1/3 - 1/3 - 2/3 2/3 1/3 1/3. - 1/./3 1/./3. - 1/./3 1/./3. o. o. 1•. 111. d. 21]. o o Figura 4-3 Vectores Es11;aciales de un Inversor. 41. 4.2 SECUENCIA DE CONMUTACIÓN DE SEIS PASOS Una vez obtenidos los vectores de voltaje, es posible emular un voltaje de fase senoidal mediante la secuencia descrita por el hexágono de vectores del inversor. Es decir, si la secuencia de disparo del inversor es: ( 100)-(110)-(010)-(011 )-(001)-(101) Entonces los voltajes de fase tendrán una formar alterna, desfasados 120 grados cada uno. De esta manera es posible obtener una onda de frecuencia variable y poder implementar un controlador escalar. El mayor inconveniente de este método es que el voltaje producido contiene una gran cantidad de armónicos que, como se verá más adelante repercuten en las características de desempeño del sistema.. .~~'--.__.~·-b..__ •.•.._.········...__:_ .... _.__ . . <_<_.__.~-····._.__1_ . __,__f_ ..·._._·······_·····._,_r_.···__._······•·_<---'--'•·· . ·.• ·.·. 100~~~·························~···················· · ······¡····~= -100~········:········: ........ :......... :......... ¡......... :.. ~ O.9 O. 905 O. 91 O. 915 O. 92 O. 925 O. 93 O. 935 O. 94 O. 945 O. 95 :. la. o .. :. .. .. :. :. :. ; ..... ·•· . .. . . .•.. ... :. :. :. '. . . . . • ... .. ;. :. :. .....•......:...... ·•·. :. :. .... :.. Figura 4-4. Gráficas para una secuencia de seis pasos. - 19 -.
(21) Control Vectorial. Diseño e Implementación.. Las gráficas del voltaje de línea (V), velocidad (rad/s) y corriente (A) con respecto al tiempo (s) para la secuencia propuesta se muestran en la Figura 4-4. Se puede observar la forma del voltaje de línea que asemeja una señal senoidal, así mismo es posible observar la gran cantidad de armónicas presentes en la corriente del estator, produciendo fluctuaciones en el par y por ende en la velocidad también. ¡·. ). 5. PWM POR BANDA DE HISTÉRESIS. La modulación de ancho de pulso (PWM) por banda de histéresis es una técnica en donde a la salida se le permite oscilar dentro de una banda de error llamada banda de histéresis.. /. , ,,. , , ,, ... ,,. ' com:emttuldm.ee. ... .,(:: :: :: :; ::::::-C--. ühh dhhnrin Figura 5-1. Modulación por banda de histéresis.. Consta en comparar la corriente instantánea del estator con valores extremos inferior y superior. Si la corriente de entrada está por debajo de la banda superior, el transistor del convertidor deberá llevarse a saturación (on), cuando la corriente llegue a alcanzar la banda superior el transistor se cambiará a corte (off); el transistor volverá a cambiar a saturación hasta que la corriente llegue a la banda inferior. Una de las ventajas del modulador por Banda de Histéresis es que no se necesita información precisa acerca de los parámetros o características de la carga del inversor. Si la señal de referencia es conocida y el voltaje de salida del inversor no esta saturada, la salida siempre seguirá dicha referencia. Esto nos permite olvidarnos de la dinámica eléctrica del estator (2.6) y controlar fácilmente la corriente. dl. 1 LR LR L _ ~·' =--V.. -T.l. -oJ MT + m ' ,n +-"-'' - l . - -- ( t ) Mt¡1 ¡ k .. L L 2 't'r L L . , L L r L dt O",s O",.,, a.,, a.,·, 111. .1. III. - 20 -. (2.6).
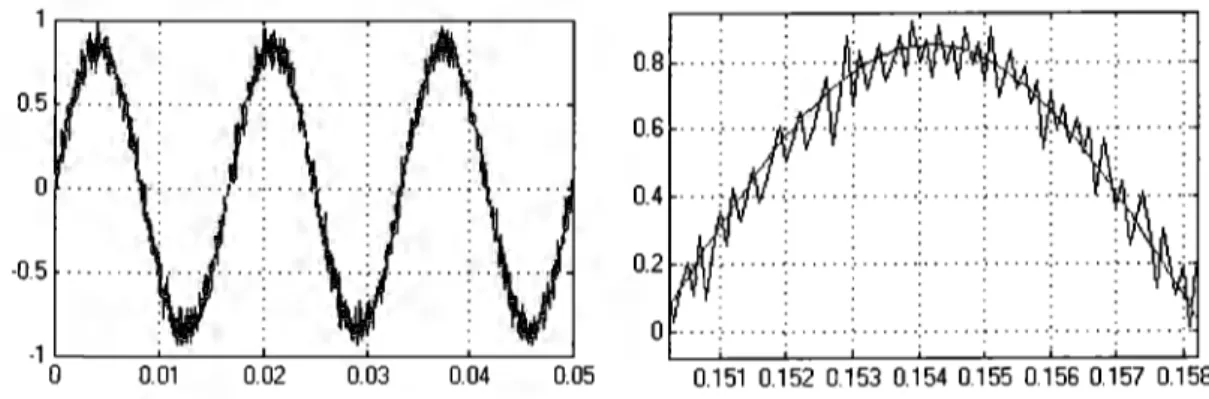
(22) Control Vectorial. Diseño e Implementación.. El valor de la banda dependerá de la dinámica del estator y de la carga, así como de las características del inversor, ya que la frecuencia de conmutación de los semiconductores está en función de la banda. En Simulink realizamos la modulación mediante una comparación entre señales de referencia y actuales y utiliza bloques de relevador. Además, tiene un muestreador que nos permite aproximarnos más al resultado obtenido al realizar la modulación con un procesador digital. 00. Block Parameters: PWM BH. [ Subsystem (mask)·......- ..- ..- ..........---- - -------·..- -.......- ....- ...- ·· --.. fl/llamelers-..--··.. -·..- ....- -..---·..- -..·------- -···---......- .....Banda de histeresis. !. ... l~mpo de muestreo. 1 O~. 1. Cancel. j. H~. Figura 5-2. Bloque de PWM por banda de histéresis.. Se realizó un control de corriente en lazo cerrado a valor nominal (Figura 5-3). Se puede observar una corriente con bajo contenido en armónicas y muy cercana a la referencia. Esta simulación se llevó a cabo mediante una banda de 0.025A y con un tiempo de muestreo de 0.1 ms. Es posible observar que la frecuencia de conmutación del inversor no es constante, además ésta será mayor en los lugares donde la FEM sea nula. (Obsérvese la cresta en la Figura 5-3.) Es visible el gran mejoramiento de la distorsión armónica a comparación de la Secuencia de Seis Pasos de la sección 4.2.. 0.5. o -0.5. o . ---:- ..... ; ...... : ... ---:-- ......... -·- .... , ...... . 0.01. 0.02. 0.03. 0.04. 0.05. 0.151 0.152 0.153 0.154 0.155 0.156 0.157 0.158. Figura 5-3. Corriente de estator (A). Banda de 0.025A y T=0.1ms. - 21 -.
(23) Control Vectorial. Diseño e Implementación.. 6. DISTORSIÓN ARMÓNICA Basándonos en el análisis matemático de Fourier, una señal se compone por un infinito de señales senoidales, una señal fundamental y señales armónicas. Idealmente las formas de onda de voltaje y de corriente en un motor de inducción deberían ser senoidales, sin embargo, al utilizar inversores para implementar controles de velocidad, las señales contienen armónicos. Una señal se puede definir por medio de series de Fourier como:. (6.1 a) donde los coeficientes son,. an. =I + T. ff(t)sin(n11'of)dt. bn. =:. T. f. + f(t)cos(nwof)dt T. (6.1b). Si la señal tiene características de ser par, impar o tiene simetría de media onda, ocurre que algunos de los coeficientes a, b serán cero. Las señales cuadradas tienen esas características, es por eso que en las corrientes estatóricas suelen encontrarse más armónicas impares que pares.. 6.1 MEDICIÓN DE LA DISTORSIÓN ARMÓNICA Algunos métodos para la medición del nivel de armónicos [8] se presentan a continuación. La distorsión total armónica, es una medida de la similitud entre la forma de onda y su componente fundamental y esta definida como: 1 '2. THD = __!_( V, I. ~v. 2. _L.,¡ n. n-2.3, .... ). (6.2). El valor THD proporciona el contenido armónico total, pero no indica el nivel de cada uno de sus componentes. Si en la salida de los inversores se utiliza un filtro, las armónicas de orden mas alto se atenuaran. Por lo tanto, resulta importante conocer tanto la frecuencia como la magnitud de cada componente. El factor de distorsión indica la cantidad de la distorsión armónica que queda en una forma de onda particular después de que las armónicas de esa forma de onda hayan sido. - 22 -.
(24) Control Vectorial. Diseño e Implementación.. sujetas a una atenuación de segundo orden. Por lo tanto, el valor DF es una medida de la eficacia en la reducción de las componentes armónicas no deseadas, sin necesidad de especificar valores de un filtro de carga de segundo orden. Se define como: DF. = }_ V¡. 2]]1/2 t V,, [( ,,t, J ••. (6.3). El factor de distorsión de una componente armónica individual, o de orden n, se define como: DF=~. ¡n 2. V,. n. (6.4). 6.2 FACTOR DE POTENCIA Uno de los problemas derivados de los armónicos es que el factor de potencia baja, lo cual es algo que queremos evitar. Esto se puede traducir en perdidas económicas por exceso de consumo y en bajo desempeño del motor. Además éste sufre calentamiento y esto puede dañar los devanados. Para realizar un análisis matemático, podemos partir de la ecuación de la potencia real y la corriente distorsionada: .. (P) = -. 1. 2,r. Jv(t )i(t )d(wt). (6.5). 00. i(t) =. ¿in sin(nwt + r/m) n=O. (6.6). Sustituyendo la ecuación de la corriente en la potencia nos queda lo siguiente:. (P) =. I-1 J n=O. 2,r. vJ, sin(wt)sin(nwt + </m). (6.7). (P) = ~ Jv.J1 sin(wt)sin(nwt + r/J1) 2. (6.8). Podemos concluir que la única corriente que contribuye a la potencia real es la corriente fundamental. Por lo que podemos llegar a la siguiente ecuación:. (P) = Vsn .J1,m., cos(01) 11. - 23 -. (6.9).
(25) Control Vectorial. Diseño e Implementación.. Sabemos que la relación del factor de potencia esta dado por:. (P). P.F. =. vrm...irm.,·. (6.10). Y con esto, llegamos a la siguiente ecuación:. P.F. =. V. i . rm, .1rm,. V rm.1· 1rm.1·. cos(9>1 ). (6.11). Podemos observar de la ecuación (6.11) que el factor de potencia depende del cociente de la corriente fundamental y la corriente total (fundamental más armónicos). Esto se traduce en que entre mas distorsión armónica presente la señal, más bajo será el factor de potencia.. 6.3 ARMÓNICOS EN UN MOTOR DE INDUCCIÓN Como una aproximación de primer orden, se pueden encontrar los armónicos calculando cada componente armónica del circuito equivalente por fase. Entonces las corrientes pueden encontrarse usando el principio de superposición y sumando la fundamental con el resto de sus componentes [5]. En un armónico h el flujo producido por los voltajes (Vah, Vbh, Vch) rota en el entrehierro a una velocidad de: (6.12) Donde la dirección puede ser la misma o en dirección contraria a la de rotación. Se puede verificar la fácilmente que el flujo producido por los armónicos h = 6n -1 (donde n = 1,2,3 ..... ) tienen una dirección de rotación contraria a la de la fundamental. De estos armónicos resulta un flujo en dirección contraria al rotor. Los armónicos h = 6n + 1 producen un flujo en dirección igual al rotor. Cuando se realiza un control de velocidad, el motor rota con un valor de deslizamiento razonablemente pequeño, entonces se puede asumir que la velocidad del rotor es aproximadamente la síncrona. OJ, :::::: OJ_,.. (6.13). Debido a esto, a un dado armónico h en el circuito equivalente y las ecuaciones (6.12) y (6.13), el deslizamiento relativo a la frecuencia síncrona es:. - 24 -.
(26) Control Vectorial. Diseño e Implementación.. - O)sh ± O) r - h ± 1 - } s, ------' O)sh h. (6.14). Donde el signo + ó - corresponde a la dirección del flujo en caso de estar a favor o en contra a la del rotor respectivamente. Que w,::::: w.,, y sh ::::: I se puede observar en la Figura 6-1, que se obtiene del circuito equivalente por fase despreciando L"' . Para calcular las componentes armónicas, los términos de magnetización son generalmente despreciados,. y. la magnitud. de la. corriente armónica. es. determinada por las reactancias en las frecuencias armónicas que predomina sobre R., y R, :. (6.15) La ecuación 6.15 muestra que aumentando las frecuencias en las cuales lo voltajes armónicos ocurren en la salida del convertidor, la magnitud de las corrientes se reduce.. v11 11hf. Rr/Sh,:::;:;, Rr. Figura 6-1 Circuito equivalente por fase armónica. 6.4 PERDIDAS POR ARMÓNICOS La pérdida de potencia por fase en el cobre de los devanados del estator y el rotor debido a estas corrientes de armónicos se pueden aproximar a: 00. ~ . 11. =¿(R.,+ R,.)I; h=2. - 25 -. (6.16).
(27) Control Vectorial. Diseño e Implementación.. Donde R., y Rr aumentan de manera no lineal con las frecuencias armónicas. Es difícil estimar el resto de la perdidas en el núcleo por las corrientes parásitas y la histéresis, debido a que estas cambian con la geometría del motor. Debido a que no representan mas del 10% de las pérdidas por armónicos normalmente se desprecian.. 6.5 PULSACIONES DE PAR La presencia de armónicos en la excitación del estator produce una componente pulsante de par. Si esto se aplica a bajas frecuencias se pueden presentar problemas de variación de la velocidad y fatiga en la flecha del motor. Considerando las frecuencias armónicas más bajas que son la quinta y la séptima en un inversor de onda cuadrada, la generación del par pulsante puede ser explicada mejor si se analizan por separado. En la Figura 6-2 el séptimo armónico produce una componente de flujo rotatorio a una velocidad de 7(J).,. ,. en la misma dirección que la componente fundamental. del flujo del entrehierro y el rotor. Los campos <l> agl y B, 1 , producidos por la componente fundamental, giran a la misma velocidad y, como el par es proporcional al producto cruz de éstos, resulta un par que no pulsa. Lo mismo es cierto para <l> ag? y B, 7 debido a que su velocidad es igual también. Sin embargo, <l> ag? y B, 1 tienen una velocidad relativa de <l> agI y B, 7 que también es. 6(J)s,. 6(J)s ,. similar a la velocidad relativa de. esto producirá que sus productos cruz se. cancelen cíclicamente, produciendo una componente de par pulsante.. Wr/'.::\Ws. 0. Figura 6-2 Pulsaciones de 7ª Armónica. - 26 -.
(28) Control Vectorial. Diseño e Implementación.. En la Figura 6-3 el quinto armónico produce una componente de flujo rotatorio a una velocidad de Seo.,, en dirección opuesta al rotor. De esta manera <I> ags y B,1 tienen una velocidad relativa de 6co, al igual que <I> ai:i y B, 5 • Esto producirá que sus productos cruz se cancelen cíclicamente, produciendo una componente de par pulsante. Las 5ª y 7ª componentes producen, por lo tanto, pulsaciones en frecuencias de sexto armónico y sus consecuencias se suman por superposición. De modo que estas dos componentes se tratan de evitar en todo caso, para mejorar el desempeño del sistema.. m0ws Figura 6-3. Pulsaciones de 5ª Armónica.. - 27 -.
(29) Control Vectorial. Diseño e Implementación.. 111. DISEÑO En este capítulo se desarrollan el diseño de los controladores y estimadores necesarios para llevar a cabo el control del motor de inducción. Para este fin, se toman en cuenta especificaciones de diseño y las características de nuestro equipo, como lo son el inversor y DSP.. 1. CONTROL VECTORIAL Y PWM Esta parte del sistema se encargará de: •. Medición de Corrientes y Velocidad.. •. Transformar las corrientes de estator del marco abe al marco dq.. •. Estimar magnitud y orientación del Flujo Rotórico. •. Transformar las corrientes de referencia del marco dq al marco abe.. •. Controlar la corriente del motor mediante PWM por banda de histéresis.. En esta sección se propondrá el tiempo de muestreo y se llegarán a expresiones que permitan estimar la magnitud y la orientación del flujo rotórico. 1.1 TIEMPO DE MUESTREO. La orientación del flujo es una estimación crítica para el sistema, ya que permite producir las corrientes trifásicas de referencia. De esta manera, es necesario que éstas se formen por medio de puntos suaves. Será necesario tener por lo menos 100 puntos por ciclo a la frecuencia nominal de 60Hz.7 T<0.16ms. Por otro, lado la máxima frecuencia de conmutación del inversor es de 20kHz 7 T>.05ms. De esta manera propondremos un tiempo de muestreo de Tcv=0.1ms. 1.2 ESTIMACIÓN DEL FLUJO ROTÓRICO. Es posible obtener un equivalente discreto de la ecuación (ll-3.3a) para la magnitud del flujo utilizando el método de Euler hacia atrás. La utilización de éste. - 28 -.
(30) Control Vectorial. Diseño e Implementación.. se justifica debido a que la frecuencia de muestreo es muy pequeña comparada con el ancho de banda del sistema, por lo que el intervalo de convergencia es grande. Obtenemos la siguiente ecuación de diferencias: (1.1a). (1.1b). Las variables testadas están definidas entre -1 y 1 de manera que es posible realizar los cálculos utilizando representación fraccionaria. Para estimar la orientación del flujo es necesario calcular primero el deslizamiento y con este la velocidad síncrona de (ll-3.3c):. Lm. Ímax (J)e=(J)m+--~-. l. T, lf/ max (JJ max lf/ (JJmax. = 200Jl'. (1.2). rad Is. Finalmente se integra numéricamente la velocidad síncrona para encontrar la orientación del flujo y se restringe su valor entre -21t y 2n. Para realizar la integración se aplica el método de Tustin a la ecuación (ll-3.3c): -. -. Pk = A-1. T (J)max T (J)max + - - - ( J ) e , k +---(J)e,k-1 2 Pmax. 2 Pmax. (1.3). p max = 2í'l' rad. 1.3 ESTIMACIÓN DE RESISTENCIA Un parámetro muy importante para la estimación del flujo es la resistencia. Encontramos que la resistencia resulta ser un problema ya que tiene variaciones muy grandes en magnitud, hasta el 200%, esto debido a que el motor al estar trabajando durante un largo tiempo se calienta y esto hace que la resistencia del rotor también se caliente y debido a este aumento de la temperatura la resistencia. - 29 -.
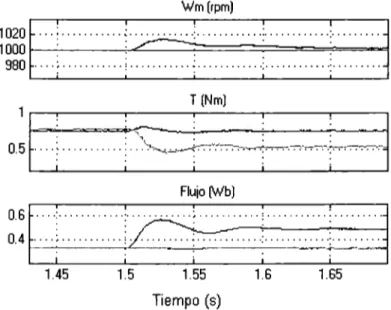
(31) Control Vectorial. Diseño e Implementación.. cambia su valor con respecto al valor encontrado cuando se hicieron las pruebas para obtener los parámetros del motor. El cambio en la resistencia del motor es inevitable debido al calentamiento propio del motor al estar en funcionamiento. La variación en la resistencia dará como resultado que la estimación del flujo no sea la correcta ya que el ángulo p entre el marco. ap y el marco dq que esta orientado con el flujo del rotor no sea. efectiva, por lo tanto no podremos orientarnos realmente en el flujo del rotor y la estimación del flujo será incorrecta. \.1/m(rpm). ~:¡ ¡ !:=±. t. gj. 980 · · · ·:· · · · · · · · · · ·: .. · .. · · · · .. :· · · · · · .. · .. ·.·· · .. · ........ · .. · ... . T (Nm). º:H·····. ~+··+~~+·~·l Flujo [V,/b). ºll 14=$± !. i. A. 0.4 .... , ........... :. ·········:············.···········~:~· . . : . .. 1.45. 1.55. 1.5. 1.6. 1.65. Tiempo (s). Figura 1.3-1 "Respuesta del sistema sin estimación de resistencia". En la figura 1.3-1 se observa la respuesta del sistema sin la estimación de resistencias, la velocidad tiene una pequeña variación, sin embargo el par y el flujo tiene una diferencia considerable con respecto al los valores reales, esto es debido a que el valor de la resistencia ha cambiado por lo tanto la estimación de flujo ya no es la correcta y la señal de par que es la señal de referencia ya no esta en el valor al que realmente debe llegar.. - 30 -.
(32) Control Vectorial. Diseño e Implementación.. '. 1. qJ(V\!b). 0.8 ........ : .......... : ...... : ... _.. O. 6 · · · · · · · ":" · · · · · · · · · · · · · ·. º· 4. _.f_~-·~j"c¡;_~·)·:········1········. ·:"·<····-:- ·······¡········:·····.. "i ·······-. ....... ! ................ f ........ f ....... T..... -.·¡- ....... T...... .. 0.2 ....... ·¡· ................ r......... ........ 1" ....... 1" ....... 1. ¡·...... .. o,___ _,__ ___.,___.___ __,____.___ _.__ ___.,_ ____, 1.1. 0.9. 1.2. 1.4. 1.3. 1.5. 1.6. Tiempo (s). Figura 1. 3-2 "Flujo del rotor". En la figura 1.3-2 observamos como el flujo estimado esta por debajo del valor real del flujo del rotor, esto nos lleva a una mala determinación del marco dq.. R, =aR, d,f, dt. Lm . Tr. 1 Tr. - - = a -=---1.,d - a -=--lflrd A. A. V= R .i + dlfl.,.. lfls. ·' ·'. dt. .r.. Lm. = CJ'Ls1_, + Lr. lfl,. Las ecuaciones anteriores sirven para determinar el factor de corrección a. por el cual se va a multiplicar la resistencia y así actualizar el valor de la misma una vez que esta cambio. Lo que se pretende es que se comparen el flujo tanto del marco estático como el del marco rotatorio. El error entre estos dos debe ser cero lo que quiere decir que la resistencia no ha variado su valor, si la resistencia empieza a variar su valor se presentara un error el cual va a ser compensado con el parámetro a. y se actualiza la resistencia dándonos como resultado una estimación correcta del flujo.. - 31 -.
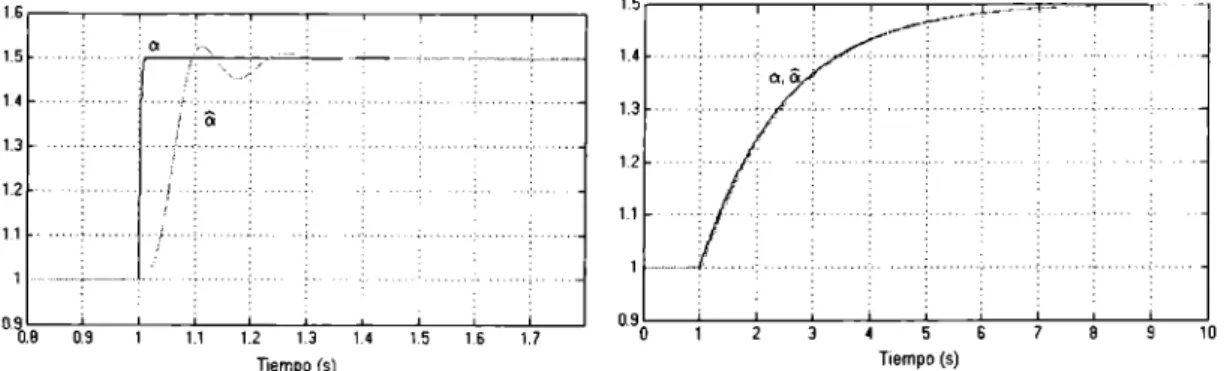
(33) Control Vectorial. Diseño e Implementación.. 12 1.1. ~. Tiempo (s). Figura 1.3-3 "Respuesta a entrada escalón y seguimiento en el parámetroa". En la figura 1.3-3 se observa como responde el parámetro a a un escalón a un cambio del 50% en la resistencia. La variación de la resistencia tiene una dinámica muy lenta, por lo que a un escalón de cambio en la misma resultara en oscilaciones, sin embargo en la siguiente imagen se puede observar como se trata de simular que la dinámica del la resistencia es mucho mas lenta y podemos observar como sigue perfectamente la referencia que se le puso. Para finalizar el estimador solo es necesario solo es necesario diseñar un controlador que lleve el error a cero entre el flujo del marco estático y del rotatorio y con esto se obtendrá en nuevo valor a el cual va a actualizar el valor de la resistencia. En la figura 1.3-4 observamos el sistema final ya con la compensación del valor de la resistencia, se pueden observar los dos bloques de flujo los cuales generan el error y el controlador va a mandar el nuevo valor de a.. Figura 1.3-4 "Sistema general con estimación de resistencia". - 32 -.
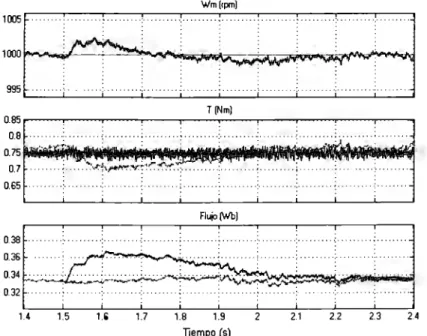
(34) Control Vectorial. Diseño e Implementación.. En la figura 1.3-5 se observan los resultados finales una vez simulado el cambio en la resistencia. Podemos ver como la velocidad se apega mucho mas rápido al su valor rea. Por otro lado el par y el flujo al tener una estimación correcta con el nuevo valor de la resistencia llegan a los valores reales. Finalmente lo que sucede en general en el sistema es que se va a tener una estimación de flujo correcta, la orientación del marco dq será la real y por lo tanto la regulación del flujo tendrá una mejor respuesta. \llm(cpm). 0.36 · · · · · :· . :··. "'. ·,. ·:-~- ~ 038r········™~-r>J. Flujo (V,'b). ~:: ~~~~:14. 1.5. -~~<~t~~±~~~~-1.lt. 1.7. 1.8. 1.9. 2. 21. ·'. ·. . ..-:·.,.,. 2.2. 2.3. 2.4. Tiempo (s). Figura 1.3-5 "Respuesta del sistema con estimación de resistencia". 2. CONTROL DE FLUJO Y VELOCIDAD Una vez obtenida la plataforma del control vectorial, sólo es necesario realizar el control convencional del flujo y la velocidad separadamente. Se diseñaron controladores continuos y posteriormente se encontraron equivalentes discretos por medio de emulación.. 2.1 REGULACIÓN DE FLUJO En la Figura 2-1 se observa el sistema, en donde el bloque de Control Vectorial y el sistema de inversor por corriente son ideales.. - 33 -.
(35) Control Vectorial. Diseño e Implementación.. Lm. FlrdNOM. Fi rd. Lr/Rr.s+1 Fi_rd'. Diroamioa Flujo. Soope6. Figura 2-1. Estimador de Flujo del Rotor.. El sistema en lazo cerrado, utilizando un controlador PI no tendrá error en estado estacionario para una entrada escalón y su ecuación característica será la siguiente: (2.1) La dinámica del flujo es de primer orden con un polo en s=-15. Deseamos hacer más rápida la dinámica del flujo, tal que ts=200ms con un sobreimpulso no mayor a 1.5% (s= 0.8), esto permitirá rapidez con bajos requerimientos de energía. De esta manera, [14) (2.2a, b). (2.3) Igualando (2.1) y (2.3) es posible obtener valores para Ki, Kp. La respuesta al escalón del flujo del rotor (Figura 2-2) cumple con los parámetros establecidos y se observa que la corriente necesaria para llevar a cabo el control es como máximo dos veces la nominal, cuando el escalón es de amplitud igual al valor de flujo nominal. Es posible observar que el tiempo de alzada del sistema es de 50ms, por lo que un buen tiempo de muestreo [14) nos permitiría por lo menos diez muestreos durante este tiempo. De manera que se propone Tp1=1ms.. - 34 -.
(36) Control Vectorial. Diseño e Implementación. Fi_rd [Wb) .. lsd" (AJ 1.5 , - - - - , - - - ~ - - r - - - - . - - - - - - . - - - - - - - ,. .. ·······=········ ................................. . . . . . . . . . ......... 0.5 · · · · · · · -:·. · · · · · · · .... · · · · · · ·:. · · · · · · · · · · ·. · ..... .. .. .. o~-__.·__...,___ __._·-----'----'----' o. 0.05. 0.1. 0.15. 0.2. 0.25. ... .. .. .. .. .. ·: ........ ; ........ ~ .. ..... .:. ...... . .. D. 5 '---_ _.__ __,___ 0.05 0.1 o. Tiempo (s). ___,'-----'----'-----J. 0.15. 0.2. 0.25. Tiempo (s). Figura 2-2. Respuesta al escalón del Flujo del Rotor.. Utilizando Euler hacia atrás la ecuación para este controlador es: 1•J,k. lfl max = 1•J,k-1 + (K P + K ;TPI ) -.-e,¡,,k. -. K P -.-e,¡,,k-1 lfl max -. 1max. (2.4). 1max. 2.2 SEGUIMIENTO DE VELOCIDAD Dentro de la dinámica mecánica estamos considerando que la fricción es despreciable (B = O). Ya que no existe contacto mecánico entre rotor y estator, esta consideración es aceptable. El lazo de control para la velocidad del motor se muestra en la Figura 2-3. De nuevo se toma en cuenta que el sistema de control vectorial e inversor controlado por corriente son ideales. Nótese que la constante K está dada por la ecuación (ll-3.2c) con el flujo en su valor nominal. Es decir, que suponemos que el control de flujo está regulando correctamente. Si el flujo no se encuentra en su valor nominal, las características del sistema cambiarán.. w(rad/s). 30/pi. Scope4. Mecánica. Figura 2-3. Lazo de Control de Velocidad.. Es posible observar que el sistema es un integrador, por lo que el error en estado estacionario con un escalón en w* es cero. Sin embargo, existe una perturbación que también afecta el error en estado estacionario. Haciendo el lazo cerrado obtenemos la expresión:. - 35 -.
(37) Control Vectorial. Diseño e Implementación.. (JJ. 1. TI,. Js + C(s). (2.5). ------. De esta manera el error en velocidad debido al par de carga será menor mientras mayor sea la amplitud del controlador en estado estacionario (s=O). Por lo tanto, la elección de nuestro controlador sería un compensador con ganancia estática muy grande, sin embargo, esto va aunado a un sobreimpulso grande y gran exigencia de energía. El controlador PI es otra opción, siendo el único inconveniente el aseguramiento de la estabilidad del sistema, ya que este añadiría un segundo polo en el origen. Esto trae la ventaja de tener un error cero en estado estacionario, debido al par de carga. La ecuación característica en lazo cerrado utilizando un controlador PI: C(s) = K + K; = K s + e p s p s. (2.6). (2.7). Nuestros requerimientos de diseño son un tiempo de establecimiento máximo. ts=1s con un sobretiro máximo de 5% (( = O. 7). Utilizando la ecuación (1.3) e igualando con (1.5) encontramos las constantes Kp, K;. w(rpm). Te". 1500.-------.-------.-------,. 15.------.-------r-------,. 1000. 1O · · · · · · · · · · · · · ·: · · · · · · · · · · · · · · · ~ · · · · · · · · · · · · · · -. 500. · ..... .. .......•.......... · · ................... .. o~---~_____._______. o. 0.5. Tiempo (s). 1.5. 5 .............. ·............... " .............. -. o o. 0.5. 1.5 Tiempo (s). Figura 2-4. Respuesta al escalón de Velocidad.. Es posible observar que el comportamiento del sistema (Figura 2-4) cumple con los parámetros establecidos, además de tener error cero en estado estacionario. - 36 -.
(38) Control Vectorial. Diseño e Implementación.. tanto para un escalón de velocidad de referencia (Figura 2-4) como para uno de par (Figura 2-5). w(rpm). or-----,-------=~==---, -20 ................ ,. 2 ........................ .. -40 · · · · · · · · · · · · · ·:. · · · .. · · · · · · · · · · <·. · · · · · · · · · · · · · · · -60. Te" 2.5 ........~~-...,........~--...........~ - -............ . .. ... ... ... · .... · .. · .....:,. · ...... · ...... ,:... · · · .. · ......... 1.5 .......... .. .. ,:............... ,:.............. .. .. .. .. .. . ......... . ... :..... . .... ······ ·:··············· .. .. .. . 0.5 · · · · · · · . .. · · · · .:,. · · · · · · · · · · · · · · ·:·. · · · · · · · · · · · · · ·. -80 · · · · · · · · · · · · · ... · · · · · · · · · · · · · · ·, · · · · · · · · · · · · · · · -100 ,___ _ ___.__ _ _ _.___ _ ___. o 0.5 1.5. o o. .. .. L . . . __ _ __,_;_ _ _ _.._·- - - - - - '. 1.5. 0.5 Tiempo (s). Tiempo (s). Figura 2-5. Respuesta al escalón de Par.. Este último controlador se ha diseñado tomando en cuenta que el par deseado Te*, que es la señal de control, es alcanzado por la máquina. Esta hipótesis se. cumplirá siempre y cuando: se regule el flujo a valor nominal y el valor de Te* no sobrepase un valor tal que ocurra saturación. De esta manera, se limitará la señal de control para que no sea mayor que 3.5Nm correspondientes a una corriente Id = 3.5A, la cual es tres veces la corriente nominal.. Sin embargo, esta saturación de la señal de control hace que el integrador del controlador acumule error provocando un sobreimpulso muy grande (Figura 2-6) w(rpm). 1500 r - - - - - - - . - - - - - - . - - - - - - - ,. Te" 4 ........~~-...,........~--...........~ - -............ 3 ............. ,:............... ,:. .. .. ......... . 1000. ........ .. . ... ········.················:········· . . .. . ... ... ... . . 500 · · · · · · · · · · · · · · ... · · .. · · · · · · · · · · · · · · · · · · · .. · · · · · ·. O,__---~----~---O. 0.5. .. . ... 2 .............. :..... .. ........ ,:............. ... 1.5. .. .. 1 .............. ,:....... ... ...... :·· · ·········"· . ... ... o ....... " ...... , " ........ " ... ·......... ... -1'-----_,___ _ ___.__ _ ___. O 0.5 1.5 Tiempo (s). Tiempo (s). Figura 2-6. Respuesta al escalón de Velocidad con saturación en la señal de control.. Esto se resuelve utilizando una configuración anti-windup como la de la Figura 2-7 [15]. En ésta se observa que cuando la señal de control se satura, se previene el acumulamiento de error en el integrador por medio de una retroalimentación de la diferencia entre el par deseado y el saturado.. - 37 -.
(39) Control Vectorial. Diseño e Implementación.. kp. ks. Figura 2-7. Esquema de PI anti-windup.[15]. Este sistema produce resultados adecuados pero tiene ciertos inconvenientes: es complicado implementarlo y si el error persiste mucho tiempo, el integrador puede ser tan grande que lleve a cabo un desbordamiento informático, comprometiendo así la estabilidad del sistema. La referencia [16] propone un controlador basado en reglas boo/enas. En este caso el acumulamiento de error en el integrador se basa en dejar de integrar en las situaciones en que esto no produce ningún efecto positivo en la respuesta. Por ejemplo, cuando el actuador está saturado (en su valor positivo) y el error es positivo, el seguir integrando no ayudará a la respuesta pues la señal de control no puede aumentar. Si en la misma situación el error es negativo (el sistema pasó la referencia), la integración ayudará a disminuir la señal de control para lograr llegar a la referencia. La ley de control es la siguiente: Tdes. (t) = K Pe(t) + K,q(t). Tde.1· >= Tmax. Tde.,. <= Tmin. Tmin. r• = Tmax. r· =. e(t) >= O-t q(t) = O. e(t) <= O-t q(t) = O. e(t) < O -t q(t). = e(t). Tmin. e(t) > O -t q(t). < Tdes < Tmax. r• = Tde., q(t) = e(t). (2.8). = e(t). Se puede representar el sistema como un controlador PI-P. Es decir, mientras no haya saturación es PI, y cuando el actuador se satura se vuelve proporcional solamente estabilizando el sistema. La respuesta del sistema con este controlador se muestra en la Figura 2-8. Como se observa, el par electromagnético se mantiene por debajo de 3.5Nm mientras que el sobreimpulso permanece dentro del rango permitido.. - 38 -.
(40) Control Vectorial. Diseño e Implementación.. w[rpm). 1000 ......... .,. . ,_.-:-'...:--:-.-:-,.:.77 .. -,... .,-,-,... .,. ,.~-..,.........----1 800 · · · · · · · · · · · · · · · · · · .. · · · · · · · · ·, · · · · · · ·. · · .... · .. 600 · · · · · · · · · · · · · · .. · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·. Te" 4~~--~--~~--~~. 3 .............. <· ............. • -:· ............. . .. .. ... ... . . .. 2 ............. <· .............. -:· ............. .. 400 · · · · · · · · · · · · · · ·.· · · · · · · · · · · · · · · · · · · ·. · ........ .. .............. .:.... . ...... ····· :··············· .. 200 · · · · · · · · · · · · · · .·. · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·. o ........... "-.a.·"-'··..:....:·º--'-'º........- -..........~ - - - - ,. o. ... -1. 0.5. 1.5. ... L------'-------'-------'. o. 1.5. 0.5. Tiempo (s). Tiempo (s). Figura 2-8. Respuesta al escalón de Velocidad con controlador PI anti-windup.. La implementación de este controlador es muy simple. Utilizando Euler hacia atrás como equivalente discreto obtenemos. q(t). = e(t) ~ qk+I = qk + Tn. q(t)=O. · ek. (2.9). ~qk+i=qk. 2.3 ESTABILIDAD DEL SISTEMA Hemos diseñado un controlador de velocidad bajo la suposición de que el flujo se mantiene en su valor nominal. Por lo tanto, para evitar caer en inestabilidad es necesario analizar qué le sucede a los polos del sistema cuando el flujo no se encuentra en su valor nominal. Si se obtiene la función de transferencia en lazo cerrado del sistema de la. Figura 2-3 obtenemos la siguiente ecuación. característica: 1 + a ·C(s) Js. =0. a =1./f-SS-. (1.7). 1./f NOM. Donde a representa el cociente del flujo y su valor nominal, es decir, es una medida de qué tan cercano esta el flujo a su valor nominal. De esta manera, es posible encontrar el lugar de las raíces de nuestro sistema, mientras varía a. En la Figura 2-9 podemos observar que para cualquier valor de a el sistema es estable, aún cuando el sobreimpulso crezca entre diez y veinte por ciento para valores del flujo por debajo de la mitad de su valor nominal.. - 39 -.
(41) Control Vectorial. Diseño e Implementación. Rool: Locu,. 1. i §. '. ~ 1 - - - - - - - - - - t l ----- -----·-·····--·- ······· ···- ·-· -1 ,·. \. .i. ~----. //_. ""-. .,,,.,....___,,,_~----t---·-~~==--·. i;:=,. --. - 3-1. _..,,........ 1 _ ___,o -,-~..,..,.,._,..~~-~1*". Figura 2-9. Respuesta al escalón de Par.. 3. RESPUESTA GLOBAL DEL SISTEMA El sistema diseñado se muestra en la Figura 2-1, se pueden observar los bloques que lo conforman: Los controladores obtienen las corrientes dq referencias las cuales son transformadas al marco abe, utilizando el flujo estimado. Finalmente se realiza PWM por banda de histéresis.. E]. Doble Click para cargar parametros y condiciones iniciales.. E]. Doble Click para editar parametros y condiciones iniciales.. PHlrd_NOM Flujo'. PI Anti-windup Flujo iabc Pulsos. Pabc \t.ibc. P11 abc. wm•. PWM BH. PI Anti-windup Velocidad. Inversor. dq --> abe. PHlrd Par de Carga. Motor de lnducció. teta PHlrd. PHlrd Tem. Wm(rpm)14---------------+. Estimador. Figura 2-1 O. Esquema de Control de Velocidad Vectorial para un motor de inducción.. La respuesta del sistema se observa en la Figura 2-2, es posible observar que la respuesta es satisfactoria con un tiempo de establecimiento menor a un segundo. Utilizando como máximo corrientes de 3.5A de amplitud. Es posible observar que el controlador PI antiwindup lleva acabo su trabajo, ya que en ningún caso se observan sobretiros excesivos y el tiempo de. - 40 -.
(42) Control Vectorial. Diseño e Implementación.. establecimiento se conserva menor a 0.5s inclusive. El efecto de la saturación es visible en las corrientes, cuyo valor no sobrepasa los 3.5A de amplitud Wm(rpm). 4000. 1. 1. !. 1. 1. ::: :.·······/•!••········· ,•..••.•..•. .· /:/' .•............ !. 1. 1. i~-..-. 1<~. ·•:.· ·~[·.· ·-~:. 1000 - · .. · ,./ · · _: .. · ...... · · : .. · · .. · · · · .. · · · · .... ., · .. .. ........ · · .. · · · · · .. .. · · · .. · .. · · .. · · .. · .. :· .. .... · .. ·-. ,,/ 0 /. : 1. i. ¡. i. :. :. i. i. j. i. 1. labc(A). 4 , - - - - , - - - - - - r - - - - - , - - - - - r - - - - - - r - - - - - - - r - - - - - r - - - - , - -- - , 2. o -2. ....... . ..... ............ .. '. -4 ...__ _..___ __.___ __.__ __,___ ___,__ ___.__ ____.__ ___..___~ 4.5 o 3.5 4 0.5 1.5 2 2.5 3 Tiempo (s). Figura 2-2. Respuesta del Sistema a escalones de Velocidad.. Para llevar a cabo la regulación en todos estos puntos de operación con buenas características de transitorio y estado estacionario, es necesaria una buena regulación del flujo obteniendo así el par comandado por el controlador. En la Figura 2-3 es posible observar la regulación del flujo a valor nominal y la comparación entre par comandado y el par desarrollado por la máquina. Flujo ["Wb). Torque• (Nm). :t_f]·······················: . . .:.-...•...... 1.-.• -.-.·.·····l···········•r••••. 1 .....,....,---:-:-:·~-.--:--:--~----'---~'7'--._._-i j. ¡. 0.5 / .... -4 ...__ __.___ ___,__ ____.__ _ _.____. o 2 3 4. /. :•. :•. !........ : ........•........ : ...... . : : : :. o:....'_ __.___ _..___. O. 0.1. 0.2. ___.__ _~ - - ~. 0.3. Tiempo (s). Tiempo (s). Figura 2-3. Seguimiento de Par Comando y Regulación de Flujo.. - 41 -. 0.4. 0.5.
(43) Control Vectorial. Diseño e Implementación.. El desempeño del sistema es muy bueno, ya que el error en par es muy pequeño, esto debido a que el Flujo es regulado correctamente. lsd' [AJ. lsq• (A). 1.4 · .. · · .. · · · · :· ··· · · .. · · · .. · · · · · · · · · ··:· · · · .. . ... · 1.2 · · · · · · · · · · ., · · · · · · · · · · · · · · · · · · · ·, · ·, · · · · · · · · · · ·. o ·2 .4 ' - - - - ~ - - ~ - - ~ - - ~ 4 2 3 o. 0.8 \\..._·.,..-.-·._;·-·._.._.._.._.·.....: ._.._.._.._.-·· ..,.·-:_-·_.· _.· ~·· _.·. --1·. o. 2. 3. 4. Tiempo (s). Tiempo (s). Tiempo (s). Figura 2-4. Corrientes dq Referencia y Corrientes abe.. Para visualizar el desacoplamiento sobre el sistema es posible observar la Figura 2-4, donde se presentan las corrientes necesarias para lograr el flujo (Ísd) y el par (Ísq), que al ser transformadas al marco abe, forman corrientes trifásicas de amplitud y frecuencia variables. \.1/m(rpm). 1200.------,--,-----.----..--,-----.----..-----,--,----.-i-----, .. .. ,:_./ . .•-.... . . . !~=~-•--····· ... t~- ••-•.-.•• ••·l\ T . ~ 400 >- · /. ·. · · · • . · ;_ • · · · · · · · · · · ·.· · · · · · · · · · • .. :.. ... · · • . · · • .·. •. . • , .. • .....••.. ; ............ ·> .......... ·-. / 200 ~¡- · ·.,. · ·..:. ·... ... ··· · .:. ·· ·· .. ·· ·· · .: · ···· · .. ··· ·:· ·... · ··.. ·· ;. ·· ·.. · ···· ·+ · ·········-:- ·......····-. º._./___,__,___. _,·___.,_,·___. .,_¡·_ _ _.,_i_. labc (AJ. 4 - - - ~ - - - ~ - - - - - . - - - - . . - - --. _ _..... ,· _ _ _.._i_ _. ---.----..------.------,. 2. o ·2. 0.5. 15. 2. 2.5. 3. Tiempo (s). Figura 2-5. Respuesta del Sistema perturbaciones de Par.. - 42 -. ~. 3.5.
(44) Control Vectorial. Diseño e Implementación.. Finalmente en la Figura 2-5 se observa la respuesta a un escalón de velocidad y perturbaciones de par de carga actuando cada segundo. Se observa un tiempo de establecimiento menor a un segundo y sin error en estado estacionario. Es evidente que para sostener la velocidad a pesar de la presencia de carga en necesario aumentar la corriente, tal como lo muestra la figura.. - 43 -.
(45) Control Vectorial. Diseño e Implementación.. IV. RESULTADOS En esta sección se presentan las actividades realizadas para llevar a cabo la implementación del modelo diseñado y los resultados obtenidos.. 1. ACONDICIONAMIENTO DE SEÑALES DE CORRIENTE El DSP requería que se acondicionaran las señales que nos dan los sensores de corriente, ya que sólo maneja la señal en un rango de O a 3.3V, por lo que fue necesario hacer una tarjeta de interfaz la cual contendría un filtro de primer orden para quitarle ruido a la señal de los sensores y amplificar la señal proveniente de los mismos a un rango definido para poder manipular las señales, por otro lado también es necesario hacer un offset ya que el DSP no lee los valores negativos de la señal senoidal. C1. -----1~-1n. R5. R1. ~----'\,'ll'·v-----. wJOk o. V+3.3k. o 4. 3. + -. 2. -Yr·. 1. 4. U3A. ~. U4A. ®. R3. V8 ( "v. l. 10k R7 ~Ok. 11. R6. _l_vg. LM324. -1.65 _. V-. I. Figura 1-1 Circuito de acondicionamiento de la señal de corriente del sensor. Primeramente se partió de que se tendría una escala completa de 8A pico a pico, tomando esto como referencia se encontró que 1OOmv del sensor de corriente del inversor corresponde a .4A en nuestra escala completa sin embargo debemos de llevar esto a un rango de 3.3V para poder ser procesados por el DSP por lo que nuestra escala completa de 8A corresponden a 2V los cuales tiene que - 44 -.
Figure



+7



Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
quiero también a Liseo porque en mi alma hay lugar para amar a cuantos veo... tiene mi gusto sujeto, 320 sin que pueda la razón,.. ni mande
(1886-1887) encajarían bien en una antología de textos históricos. Sólo que para él la literatura es la que debe influir en la historia y no a la inversa, pues la verdad litera- ria
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
95 Los derechos de la personalidad siempre han estado en la mesa de debate, por la naturaleza de éstos. A este respecto se dice que “el hecho de ser catalogados como bienes de
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
De hecho, este sometimiento periódico al voto, esta decisión periódica de los electores sobre la gestión ha sido uno de los componentes teóricos más interesantes de la
