Segmentación de imágenes de tomografía computarizada con artefactos metálicos usando métodos globales
70
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubian” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419.
(3) i. PENSAMIENTO. “El. mundo está en manos de aquellos que tienen el coraje de soñar y de correr el riesgo de vivir sus sueños”. Pablo Coelho.
(4) ii. DEDICATORIA. A los mejores padres del mundo, Fernando y Luisa. A Any y Ale, que la distancia que nos separa pueda borrarse, al menos por hoy..
(5) iii. AGRADECIMIENTOS. A mis padres por ser ejemplos de dedicación y esfuerzo, por todos sus consejos oportunos y desvelos, en todos estos años de estudio. A mis abuelos por consentir todos mis caprichos, por estar siempre presentes, por tanto amor. A mis tías por vivir mis pesares y alegrías como si fueran suyos. A mis compañeros del IPVCE, definitivamente estos cinco años no hubieran sido los mismos sin su presencia. A mi amigo, maestro, compañero de estudios y barbero, Nail, por simplemente estar. A Lilo por siempre “ir a mí”. A mi amigo más antiguo, Jorge Ignacio, y todas las personas con las que he compartido en estos cinco años, por hacer de la universidad, ese lugar, al que todos quisiéramos regresar..
(6) iv. TAREA TÉCNICA Para el logro de los objetivos propuestos en el presente trabajo, la investigación sigue una línea de trabajo definida por un grupo de tareas, las cuales son: 1. Análisis de los algoritmos de segmentación de artefactos metálicos según la bibliografía consultada. 2. Definición los algoritmos y parámetros a emplear para modificar las imágenes. 3. Modificación las imágenes a través de los algoritmos de segmentación. 4. Identificación de las métricas mediante las cuales se evaluarán las imágenes obtenidas. 5. Análisis de los resultados obtenidos. 6. Confección del informe del Trabajo de Diploma.. Firma del Autor. Firma del Tutor.
(7) v. RESUMEN. La tomografía computarizada (TC) se ha convertido, con el de cursar de los años, en una poderosa herramienta para alcanzar un diagnóstico médico apropiado, que se ha visto afectada por los artefactos metálicos. La presente investigación está dirigida a minimizar los efectos nocivos que producen los artefactos, encontrando el algoritmo de segmentación por umbralado global que sea capaz de reducir los artefactos sin deteriorar la calidad de las imágenes. Para ello durante el desarrollo de la investigación se caracterizan los artefactos más comunes presentes en las tomografías, se explican en qué consisten los métodos globales de umbralado y se expone el desarrollo matemático de los cinco métodos que se emplean en la investigación y su implementación en MatLab. Por último, se evalúan las imágenes obtenidas, objetiva y subjetivamente, concluyendo que el algoritmo que mejor se desempeñó en la región de cabeza fue Kurita 92, mientras que, Ridler 78 fue con el que se alcanzó mejores resultados en las regiones del hígado y el abdomen..
(8) vi TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. Principios básicos de la tomografía computarizada y la segmentación de. imágenes. 4. 1.1. Principio de funcionamiento y desarrollo de la tomografía computarizada ......... 4. 1.2. Características de los artefactos producidos en Tomografía Computarizada ....... 7. 1.2.1 1.3. Artefactos más comunes en imágenes de Tomografía Computarizada ............ 7 Segmentación de imágenes de Tomografía Computarizada............................... 11. 1.3.1 1.4. Artículos relacionados con segmentación de imágenes de TC ....................... 14 Conclusiones parciales ....................................................................................... 16. CAPÍTULO 2.. Segmentación. de. imágenes. por. umbralado. global,. principales. herramientas y técnicas utilizadas......................................................................................... 18 2.1. Métodos globales de umbralización ....................................................................... 18. 2.1.1. Principales técnicas de segmentación de imágenes por umbralado global ..... 19. 2.2. Implementación de los algoritmos en MatLab ................................................... 23. 2.3. Adquisición de las imágenes de TC empleadas ................................................. 24. 2.4. Evaluación de las imágenes ................................................................................ 25. 2.5. Conclusiones parciales ....................................................................................... 26. CAPÍTULO 3.. Comparación de los algoritmos utilizados para la segmentación de. imágenes de TC afectadas por implantes metálicos ............................................................. 28.
(9) vii 3.1. Resultados de los algoritmos utilizados para segmentar artefactos y el metal en. imágenes de TC afectadas por implantes metálicos ......................................................... 28 3.2. Evaluación objetiva de las imágenes derivadas del maniquí de cadera ............. 31. 3.3. Evaluación objetiva de las Unidades de Hounsfield en las imágenes de maniquí. de cadera ....................................................................................................................... 32 3.4 3.5. Evaluación subjetiva de las imágenes obtenidas ................................................ 32 Conclusiones parciales ........................................................................................... 35. CONCLUSIONES ................................................................................................................ 36 Recomendaciones ............................................................................................................. 37 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 38 ANEXOS .............................................................................................................................. 41 Anexo I. Imágenes originales identificadas por regiones. ................................................ 41 Anexo II. Tabla de los valores de Nbins y k, por imágenes, resultantes de los algoritmos de segmentación ................................................................................................................ 42 Anexo III. Imágenes obtenidas en la investigación utilizando los algoritmos de segmentación por métodos globales ................................................................................. 43.
(10) INTRODUCCIÓN. 1. INTRODUCCIÓN. La tomografía computarizada se ha convertido en una de las técnicas de diagnóstico médico más utilizadas. Desde su introducción clínica, en 1971, ha experimentado sucesivos avances que han hecho posible la aparición de nuevas indicaciones en diferentes campos de la medicina [1]. La TC, era, en el momento de su introducción clínica, una modalidad de rayos X que permitía obtener únicamente imágenes axiales del cerebro, de interés en neurorradiología. Con el paso del tiempo se ha convertido en una técnica de imagen versátil, con la que se obtienen imágenes tridimensionales de cualquier área anatómica, y que cuenta con una amplia gama de aplicaciones [2], [3]. El objetivo de una adquisición de TC es medir la transmisión de los rayos X a través del paciente en un gran número de proyecciones. Las proyecciones se obtienen mediante la acción combinada del tubo de rayos X rotando alrededor del paciente y de sistemas detectores que cuentan con cientos de elementos a lo largo de un arco detector [4]. El principal desafío de la TC es lograr obtener una imagen lo más clara posible de cada una de estas proyecciones para luego reconstruirlas, y usarlas como punto de partida en diagnósticos médicos, que, de otra forma, serían prácticamente imposibles de realizar sin someter al paciente a intervenciones quirúrgicas invasivas [5]. A pesar del gran desarrollo que en los últimos años han alcanzado los tomógrafos debido principalmente a los vertiginosos avances en los campos de la electrónica y la computación, las imágenes médicas siguen siendo afectadas por artefactos, los cuales, en múltiples ocasiones, hacen que sea muy difícil obtener un diagnóstico médico acertado [6]. Para reducir los efectos que producen en las imágenes de TC los artefactos, especialmente, los artefactos metálicos, es de gran utilidad el procesamiento digital de las imágenes obtenidas en los tomógrafos. El procesamiento de las imágenes comienza con la segmentación y la división de las imágenes en regiones de interés (ROI) [7]. Existen diversos algoritmos capaces de segmentar una imagen, pero la presente investigación se centrará en algoritmos que se fundamentan en la umbralización por métodos globales, o.
(11) INTRODUCCIÓN. 2. sea, que emplean las propiedades globales de las imágenes para establecer un umbral capaz de separar el primer plano del fondo. El trabajo numérico y de procesado de imágenes, necesario para la realización de este proyecto, se implementará en el software de análisis matemático MatLab, que constituye una herramienta muy confiable para la manipulación de matrices y la representación de datos, lo que permitirá comprobar, cuál de las funciones que aplican el umbralado global es capaz de alcanzar mejores resultados afectando lo menos posible la calidad de las imágenes. En Cuba a pesar del gran desarrollo con que se cuenta en la rama médica, las investigaciones sobre este tema son escasas, de ahí lo novedoso de este proyecto, que, además de hacer más satisfactorio el trabajo de los especialistas médicos, influirá directamente en la salud y la calidad de vida de la población cubana. Teniendo en cuenta lo expuesto anteriormente se plantea el siguiente problema de investigación: ¿Cómo comprobar la eficacia de las técnicas de segmentación por métodos de umbralado global para remover artefactos metálicos en imágenes de TC? Esta investigación tiene como objeto de estudio los métodos de segmentación de imágenes de tomografía computarizada y el campo de estudio lo constituyen los métodos de umbralado global de segmentación de imágenes. Para dar cumplimiento al problema de investigación se propone el siguiente objetivo general: Evaluar el desempeño de algoritmos de segmentación por métodos de umbralado global en imágenes de tomografía computarizada, para la reducción de artefactos provocados por implantes metálicos. Para resolver el problema de investigación y dar cumplimiento al objetivo general, se plantean los siguientes objetivos específicos: Caracterizar los artefactos producidos por implantes metálicos en la TC para segmentarlos empleando métodos globales de umbralización. Identificar los métodos globales de umbralización para segmentar imágenes de TC afectadas por artefactos metálicos. Describir las características principales de los algoritmos de umbralado global para su utilización en la segmentación de imágenes de TC afectadas por artefactos metálicos..
(12) INTRODUCCIÓN. 3. Comparar los algoritmos de umbralado global utilizados para la segmentación de imágenes de TC afectadas por implantes metálicos. A partir de cada objetivo específico se crean interrogantes científicas, a las cuales se les dan respuestas en el desarrollo de la investigación: ¿Qué características tienen los artefactos producidos por implantes metálicos? ¿Cuáles son los métodos de umbralado globales para segmentar imágenes de TC afectadas por artefactos metálicos? ¿Cuáles son las principales características de los algoritmos de umbralado global que se utilizan en la segmentación de imágenes de TC afectadas por artefactos metálicos? ¿Cuál algoritmo de umbralado global es el más apropiado para segmentar imágenes de TC afectadas por implantes metálicos? Los resultados de esta investigación influyen decisivamente en el tratamiento de las imágenes de TC que han sido afectadas por artefactos metálicos, permitiendo que las mismas puedan ser usadas de manera eficiente por personal médico calificado, para realizar diagnósticos acertados, y dejará tema abierto, para que fututas investigaciones puedan apoyarse en este trabajo. Para cumplir los objetivos establecidos, el trabajo se dividió en: introducción, tres capítulos, conclusiones, recomendaciones, referencias bibliográficas y anexos. En el primer capítulo se reseña la evolución de la TC y su principio de funcionamiento. También se caracterizan e identifican los artefactos más comunes presentes en las imágenes médicas, y se exponen algunos de los métodos de segmentación de imágenes utilizados a nivel internacional. Por último, se señalan algunas investigaciones acerca del empleo de la segmentación en las imágenes médicas. En el segundo capítulo se identifica al umbralado global, se expone el desarrollo matemático de los algoritmos de segmentación empleados en la investigación y su implementación en MatLab. Además, se especifican las fuentes de las imágenes usadas en el proyecto y las condiciones bajo las cuales fueron evaluadas. En el tercer capítulo se muestran los resultados obtenidos, y se realiza un análisis de los mismos, con el fin de comprobar el desempeño de cada uno de los algoritmos utilizados en la investigación..
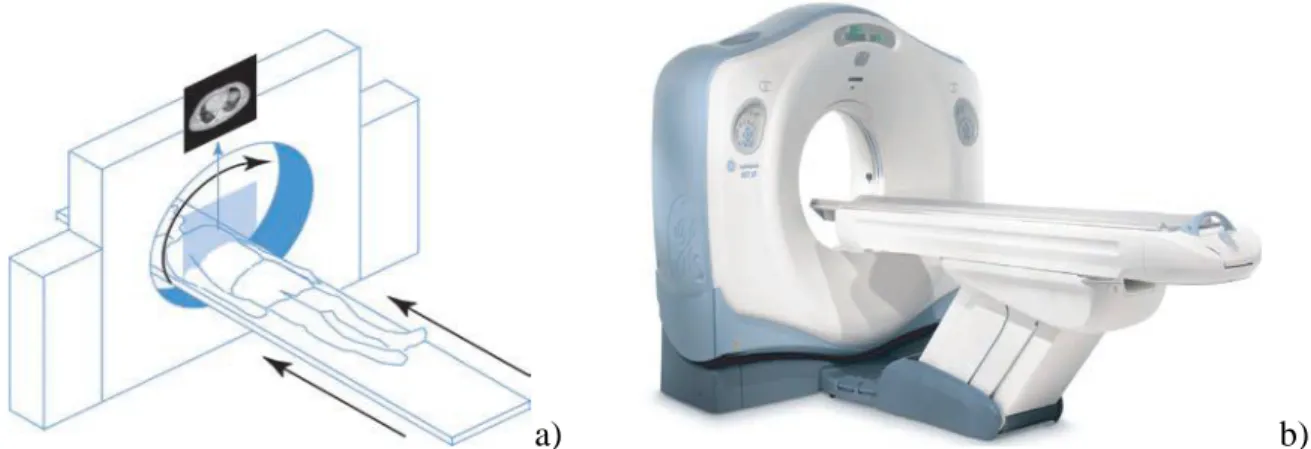
(13) CAPÍTULO 1. PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. CAPÍTULO 1. Principios básicos de la tomografía computarizada y la segmentación de imágenes La tomografía computarizada surgió por la necesidad urgente de encontrar respaldo visual a procedimientos médicos encargados de diagnosticar enfermedades y traumatismos, a los que no se les encontraban solución con los exámenes físicos de los pacientes. En la actualidad su uso es muy difundido en la medicina utilizándose prácticamente en todos los campos de la misma. En este capítulo se realiza una breve descripción de la tomografía computarizada desde sus inicios hasta nuestros días, se expone su principio de funcionamiento y se hace un breve bosquejo de los diferentes tipos de tomógrafos que existen en la actualidad, resaltando sus usos, ventajas y desventajas, así como la necesidad del procesamiento de imágenes dentro de la tomografía. También se describen algunas de las más actuales técnicas y herramientas de procesamiento de imágenes, algunos de los artefactos más comunes presentes en las imágenes médicas y el uso de la segmentación como método para eliminarlos.. 1.1 Principio de funcionamiento y desarrollo de la tomografía computarizada El término TC, se refiere a un procedimiento computarizado de imágenes por rayos X en el que se proyecta un haz angosto de rayos X a un paciente y se gira rápidamente alrededor del cuerpo (Fig. 1.1). A través de este procedimiento se obtienen imágenes debido a la propiedad que tiene el cuerpo de atenuar los rayos X. La atenuación de los rayos X es medida por detectores y este proceso se repite hasta cubrir todo el campo de vista y todos los ángulos posibles de la región de interés (ROI). Basados en estas medidas, la atenuación de cada punto de la región escaneada puede ser reconstruida, obteniéndose una imagen médica [8]..
(14) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. a). 5. b). Fig. 1.1 a) Representación esquemática de una TC. b) Fotografía de un tomógrafo actual [8]. A través de los años, múltiples generaciones de tomógrafos se han sucedido. Los tomógrafos de primera generación solo contaban con un detector por lo que el movimiento tenía dos etapas, una de rotación y otra de traslación, y el tiempo de adquisición de datos rondaba los 5 minutos por proyección haciendo que solo fuera posible utilizarlo para obtener imágenes craneales. La siguiente generación fue superior, al emplear un haz de rayos en forma de abanico en combinación con múltiples detectores, lo que permitió reducir el tiempo de adquisición a 20 segundos por proyección. En cambio, los equipos de tercera generación eran capaces de aprovechar mejor la radiación, de ahí que los movimientos de traslación de la fuente de rayos X se hicieron obsoletos y, en su lugar, la fuente rota conjuntamente con un arreglo de detectores que conforman un arco de circunferencia (Fig. 1.2) [9].. Fig. 1.2 Generaciones representativas de la evolución de la tomografía..
(15) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 6. a) Tomógrafo de primera generación: Utiliza dos sesiones de movimiento una de traslación y otra de rotación y genera proyecciones paralelas. b) Tomógrafo de tercera generación: Nótese que los rayos forman una especie de abanico (fan beam) y tanto la fuente de rayos X como el arreglo de detectores rotan dentro del gantry. c) Tomógrafo de cuarta generación: Sólo la fuente de rayos X rota a través de un anillo de detectores estacionario; las proyecciones son también en forma de abanico [10]. La cuarta generación presenta la misma configuración, pero la radiación es detectada por un arreglo de detectores fijo en forma de anillo que rodea al paciente en todo momento trasladándose solo la fuente de rayos X [9]. La quinta generación de tomógrafos fue diseñada específicamente para obtener imágenes del corazón. Cuenta con un diseño costoso debido a que no usa tubos de rayos X convencionales, sino cuatro arcos de tungsteno en forma de circunferencia alrededor del paciente que son golpeados por un haz de electrones guiados electromagnéticamente. Los rayos X son producidos cuando el haz de electrones golpea el ánodo de tungsteno y esta radiación es detectada en el lado opuesto por un anillo de detectores estacionarios. Debido a que el sistema es completamente estacionario, los tiempos de adquisición de una proyección rondan los 50 milisegundos siendo capaz de obtener imágenes precisas del corazón [11], [12]. Por su parte, la sexta generación, también llamada TC helicoidal, consiste en un arreglo convencional de detectores y tubos de rayos X que rotan continuamente conformando un plano detector en forma de elipse con respecto a la posición del paciente. En los escáneres modernos los períodos de rotación están entre los 0.3 y 0.5 segundos [11]. La séptima y más actual generación de tomógrafos es nombrada multicortes al caracterizarse por tener arreglos multidimensionales de detectores. La misma se basa en la arquitectura de la tercera generación, mas, en este caso, el haz de rayos X tiene forma de cono en lugar de abanico. Al emplear esta tecnología pueden ser colectadas hasta 320 proyecciones simultáneamente lo que permite reducir drásticamente el tiempo de adquisición de datos, pero también lleva al extremo el hardware encargado de procesar la información y reconstruir las imágenes [10], [11]..
(16) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 7. A pesar de que no son pocos los avances que a lo largo de los años se han logrado en todo lo referente a la TC, en muchas ocasiones los datos obtenidos por los tomógrafos no son del todo correctos dando lugar a los artefactos.. 1.2 Características de los artefactos producidos en Tomografía Computarizada Un artefacto es una discrepancia entre los valores de coeficientes de atenuación de una imagen reconstruida y los verdaderos valores de coeficientes de atenuación que tiene el objeto, por lo que se puede decir que, bajo esta definición, todas las imágenes obtenidas en TC contienen artefactos, sin embargo, en lo adelante solo se hará referencia a los artefactos que son clínicamente significativos para el desempeño de los radiólogos[13], [14]. Los artefactos pueden degradar seriamente la calidad de las imágenes de TC al punto de hacerlas inutilizables para obtener un diagnóstico médico. Para optimizar la calidad de la imagen es necesario entender por qué los artefactos ocurren y cómo prevenirlos o suprimirlos. Estos son producidos por múltiples causas, entre ellas, las relacionadas con la Física en el proceso de adquisición de datos de la imagen de TC, los que involucran al paciente, como son el movimiento respiratorio y la presencia de implantes metálicos, los ocasionados por el mal funcionamiento del escáner, y los producidos en el proceso de reconstrucción de las imágenes. [15], [16]. 1.2.1 Artefactos. más. comunes. en. imágenes. de. Tomografía. Computarizada Unos de los artefactos más comunes en TC son los de origen físico, debido a que son causados por los procesos físicos en la adquisición de datos. Dentro de este grupo de artefactos se encuentran los llamados: endurecimiento del haz (beam hardening), efecto de volumen parcial (partial volumen), insuficiencia de fotones (photon starvation) y submuestreo (undersampling). Generalmente los artefactos de origen físico pueden ser atenuados mediante calibración, filtrado, software de corrección, técnicas de escaneo y procesamiento de imágenes [16]. El endurecimiento del haz (Fig. 1.3) se debe a que un haz de rayos X está compuesto por fotones con un rango de energía determinada, y a medida que el haz pasa a través de los.
(17) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 8. tejidos sus fotones de menor energía son absorbidos con mayor rapidez que los de alto contenido energético. Como resultado surgen dos tipos de artefactos, uno en forma de bandas oscuras sobre la imagen o líneas entre los objetos más densos en la imagen, y otro en forma de abolladura [16].. Fig. 1.3 Imagen de un maniquí de cráneo humano. a) Imagen reconstruida usando corrección de endurecimiento del haz para la ventana de agua. b) Imagen reconstruida usando corrección de endurecimiento del haz para la ventana de hueso [15]. Los diseñadores de tomógrafos minimizan los efectos de este artefacto utilizando filtrado, corrección de calibración y software de corrección de imágenes, los que consisten en algoritmos iterativos que se aplican a regiones óseas cuando la imagen empieza a reconstruirse. Estos programas ayudan a definir las regiones óseas, las regiones de tejido blando del cerebro y reducen las bandas oscuras en regiones no homogéneas [16]. El efecto de volumen parcial ocurre cuando una gran divergencia del haz a lo largo del eje z hace que un objeto fuera del eje pueda ser visto, o no, por los detectores, dependiendo de la dirección de la proyección, y se manifiesta como artefactos en forma de sombras (Fig. 1.4). El origen de estos artefactos no tiene relación con el promediado parcial de volumen que produce un valor del píxel en la imagen, que representa la atenuación promedio de los materiales contenidos en un voxel. Los artefactos de volumen parcial pueden ser fácilmente eliminados usando secciones de adquisición delgadas, lo cual se hace prácticamente.
(18) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 9. necesario cuando la anatomía de la parte del cuerpo de la cual se quiere obtener una imagen cambia rápidamente en la dirección del eje z [16].. a). b). c). Fig. 1.4 a) Esquema representativo de la sucesión de un artefacto de volumen parcial. b) Imagen de TC de tres varas cilíndricas de acrílico, de 12 mm de diámetro, suspendidas en el aire, paralelas unas con otras, a 15 cm del eje del escáner y parcialmente introducida en el área de escaneo, mostrando artefactos de volumen parcial. c) Imagen de las mismas varas, totalmente introducidas en el área de escaneo, sin artefactos [16]. La insuficiencia de fotones se manifiesta en áreas donde la fuerte atenuación causa que insuficientes fotones alcancen el detector (Fig. 1.5). El resultado son proyecciones muy ruidosas, dicho ruido se magnifica en el proceso de reconstrucción de la imagen dando lugar a listas horizontales sobre la misma. Incrementar la corriente del tubo de rayos X durante la tomografía reduce este artefacto, pero también aplica una mayor dosis de radiación al paciente. Además, son usados softwares de filtrado adaptativo para aliviar el impacto de este artefacto en las tomografías [16]..
(19) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 10. Fig. 1.6 Imagen de TC de un maniquí de hombro, mostrando artefactos de insuficiencia de fotones [16]. El submuestreo es otro artefacto muy común que ocurre cuando se produce pérdida de información sobre bordes pequeños y abruptos debido a un gran intervalo angular entre proyecciones (Fig. 1.6). Este artefacto pone en evidencia que la cantidad de proyecciones utilizadas para reconstruir una imagen de TC es uno de los factores determinantes de su calidad. Se manifiesta a través de un efecto conocido como view aliasing, que no son más que finas franjas que aparecen en ubicación radial a los bordes, pero separadas de regiones de gran densidad [16].. Fig. 1.6 imagen de TC de un bloque de teflón en un maniquí de agua mostrando aliasing (flecha) debido al submuestreo de los bordes del bloque [16]. La aliasing no provoca grandes efectos sobre el diagnóstico de una imagen médica debido a que no se asemeja a ninguna estructura anotómica humana, pero cuando la resolución de detalles finos es requerida debe ser eliminada de inmediato aumentando la cantidad de proyecciones por rotación [16]. Otro grupo de artefactos comunes en TC son los producidos por el paciente debido a movimientos o a la presencia de objetos metálicos que atenúan los rayos X. Los artefactos metálicos son ocasionados por la presencia de metal en el área de escaneo (Fig. 1.7). Esto ocurre, dado que, la densidad del metal es más alta que el rango normal que puede ser asimilado por la computadora del tomógrafo, encargada de procesar los datos, lo cual da lugar a perfiles de atenuación incompletos [16]..
(20) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 11. Fig. 1.7 Imagen de TC de un paciente con un implante de metal en la columna reconstruida sin corrección [16]. Los artefactos metálicos son particularmente pronunciados en metales con alto número atómico como el hierro o el platino, y menos pronunciados en metales con número atómico bajo como el titanio. En algunos casos, un simple cambio de posición del paciente o del gantry pueden aislar el metal de la imagen axial de interés. Son múltiples los estudios que se han dedicado a reducir los perjudiciales efectos de los artefactos metálicos. Algunas técnicas reemplazan la proyección de la señal producida por el objeto metálico por una proyección de una señal sintetizada basada en muestras de proyecciones cercanas que no contienen implantes metálicos. Esta técnica es muy efectiva para remover los artefactos de las regiones que rodean al objeto de metal (las proyecciones que no contienen objetos de metal son bien preservadas), pero toda la información propiamente del objeto de metal se pierde completamente, así como la de las regiones que están inmediatamente adyacentes a él. Este método iterativo es conocido como MDT (Metal Detection Technique) por sus siglas en inglés [16]. Una gran cantidad de las técnicas utilizadas para remover los artefactos metálicos utilizan como punto de partida el procedimiento de segmentar las imágenes afectadas en regiones donde sus efectos no son tan notorios, para obtener información que puede resultar de utilidad en el proceso de reconstrucción de la imagen médica [13]–[15].. 1.3 Segmentación de imágenes de Tomografía Computarizada La segmentación de imágenes es el procedimiento de separar una imagen digital en regiones no superpuestas, con un alto grado de uniformidad en algún parámetro como: color, intensidad, textura o movimiento. El propósito de la segmentación es extraer el.
(21) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 12. contorno de diferentes regiones en una imagen, o sea, dividir la imagen en regiones compuestas por píxeles que tienen propiedades en común [7], [16], [17] . La forma más fácil de identificar una región en una imagen es marcar un área que defina una ROI. El proceso de marcar y determinar regiones de interés en imágenes de TC, especialmente si son imágenes de 3 dimensiones, puede volverse tedioso, no obstante, puede ser simplificado aplicando algoritmos de segmentación [17]. Uno de los más usados algoritmos de segmentación es la umbralización, que consiste en dividir la imagen en áreas que contienen información de interés y áreas que no son de interés, haciendo una clasificación binaria basada en la información de los niveles de grises de la imagen, o sea, dada una escala de gris de la imagen I, se encuentra un valor único y óptimo para lograr la binarización de la imagen [9]. Si se define un umbral particular q, aplicar este umbral es equivalente a clasificar cada pixel como parte del fondo o del primer plano de la imagen [18]. A su vez, todos los píxeles de la imagen son divididos en dos subconjuntos, 𝐶0 y 𝐶1 , donde 𝐶0 contiene todos los elementos con valores entre [0, 1, . . . , q] y 𝐶1 contiene los restantes elementos con valores entre [q+1, . . .,K−1], esto es, (𝑢, 𝑣) ∈ {. 𝐶0 𝑠𝑖 𝐼(𝑢, 𝑣) ≤ 𝑞 (𝑓𝑜𝑛𝑑𝑜) 𝐶1 𝑠𝑖 𝐼(𝑢, 𝑣) > 𝑞 (𝑝𝑟𝑖𝑚𝑒𝑟 𝑝𝑙𝑎𝑛𝑜). (1.1). Otro de los algoritmos de segmentación empleados con frecuencia es el conocido como region growing (desarrollo de región). Los algoritmos basados en regiones explotan el hecho de que los píxeles que forman parte de una misma estructura tienden a tener intensidades similares. Esta técnica es un procedimiento iterativo donde la imagen se segmenta usando umbrales mínimos y máximos. Una vez que se escogen los umbrales se buscan píxeles que contengan una amplitud de intensidad (u otra propiedad adecuada) que se encuentre dentro del intervalo definido por los umbrales y se agrupan para formar regiones. Existen reglas para no combinar píxeles adyacentes que difieren mucho en intensidad, mientras que se permiten combinaciones a medida que la intensidad cambia gradualmente debido a las variaciones de iluminación en el fondo de la imagen [17], [19]. También se emplea para segmentar imágenes el procedimiento nombrado como graph cut (corte de gráfico) que puede ser visto como un acercamiento a técnicas basadas en regiones.
(22) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 13. para codificar segmentos de imágenes, donde la segmentación está basada en variables binarias cuyos valores solo indican si el pixel se encuentra dentro o fuera del área de interés. Al utilizar graph cut la imagen se construye como un gráfico [N = (V, E, w, T)] donde cada pixel es representado en un subconjunto de vértices [v∈V], cada borde es representado en un subconjunto [e∈ E⊆V ×V] y medidos por una función [w:E →R] que le asigna un peso o amplitud a cada borde como una medida de igualdad entre píxeles correspondientes y un conjunto de vértices terminales[t∈T⊆V]. Una vez que cada vértice es ubicado dentro del gráfico y cada borde es medido por la función, todo se agrupa en un mismo gráfico o subconjunto de vértices terminales, dando lugar a la imagen segmentada [20]. Cada vértice del gráfico final representa un pixel de imagen, mientras que el peso entre los bordes de dos píxeles correspondientes representa la igualdad entre ellos. Generalmente la función que se utiliza para sumar los pesos o la amplitud de los bordes debe ser minimizada [19]. Cuando la imagen original es particionada en dos regiones, los píxeles de cada region pueden ser representados como gráficos separados y, a su vez, pueden ser particionados en dos regiones cada uno, y repetirse el proceso nuevamente [16] . Vale la pena resaltar el procedimiento de segmentación multiescala de imágenes, puesto que ha probado ser muy eficiente a la hora de integrar los rasgos de la imagen y la información contextual, para clasificar una región diferente de sus alrededores dentro de una imagen, siempre y cuando exista suficiente evidencia estadística para justificar dichas regiones. Asimismo, es capaz de perfeccionar el resultado de esta segmentación usando distintas escalas. Para llevar a cabo la segmentación multiescala, la imagen es sucesivamente dividida en cuatro subimágenes del mismo tamaño, J veces, y se construye una pirámide con J escalas. Los bloques de esta pirámide están compuestos por vectores de contextos que, a su vez, están compuestos por un conjunto de muestras del contorno tomadas de tres en tres, y cada uno de estos vectores puede suministrar información complementaria a otro [19]. Son múltiples y muy variadas las técnicas de segmentación de imágenes que hasta estos días han sido desarrolladas, dada la necesidad emergente que implica el procesamiento de.
(23) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 14. imágenes para el correcto desempeño de la mayoría de la tecnología que la ciencia ha logrado poner en manos del hombre; sin embargo, ninguna de ellas es capaz de desempeñarse eficazmente ante todas las aplicaciones que requieren del procesado de imágenes, pues cada una de ellas fue desarrollada para responder a una necesidad específica, y así lo demuestran los siguientes artículos, que, a pesar de enfocarse en la segmentación por métodos globales, brindan una visión de la gran cantidad de aplicaciones que puede tener una simple técnica de segmentado.. 1.3.1 Artículos relacionados con segmentación de imágenes de TC En el artículo “Global-to-Local Shape Matching for Liver Segmentation in CT Imaging” escrito por Kinda Anna Saddi, Mikaël Rousson, Christophe Chefd'hotel, and Farida Cheriet se propone un algoritmo de dos etapas para segmentar el hígado en imágenes de TC. En un primer momento se estiman y se proponen propiedades globales de formas, que usan el modelo de forma estadístico definido en un espacio dimensional de formas previamente establecidas y luego se aplica una plantilla que empareja el procedimiento para recuperar deformaciones locales que no estaban presente en el espacio dimensional previamente establecido [21]. En el artículo “Globally Optimal Tumor Segmentation in PET-CT Images: A Graph-Based Co-segmentation Method” expuesto en la Biennial International Conference on Information Processing in Medical Imaging se propone el uso de una plataforma de trabajo general que utilice simultáneamente las tecnologías de PET (tomografía por emisión de positrones) y TC para la segmentación de tumores en imágenes médicas. Este método simula la práctica clínica de delinear el tumor usando simultáneamente ambas tecnologías [22]. En el artículo “Obtención de la estructura ósea del pie al aplicar la umbralización global y la adaptativa” publicado en la Revista Internacional de Métodos Numéricos para Cálculo y Diseño en Ingeniería, se discute un método para la descripción geométrica de los huesos del pie a partir de una secuencia de imágenes (cortes) de TC. La investigación propone la combinación de la umbralización global y de la adaptativa para la determinación del dominio geométrico de los huesos en cada corte, así como el análisis de las relaciones.
(24) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 15. espaciales entre contornos en planos consecutivos a fin de obtener la superficie de los huesos [23]. Por su parte, el artículo “Segmentación de los huesos en imágenes TC empleando la umbralización global y adaptativa” analiza un método para la descripción geométrica de los huesos a partir de una secuencia de imágenes de TC y basado en la combinación de la umbralización global y adaptativa. Los resultados obtenidos demostraron que este método constituye una propuesta efectiva al problema del volumen parcial y la separación de los huesos en las articulaciones [24]. Mientras, el artículo “Segmentation of cytoplasm and nucleus of abnormal cells in cervical cytology using global and local graph cuts” publicado en la revista Computerized Medical Imaging and Graphics plantea que las técnicas de lectura automática asistida (AAR) tienen la capacidad de reducir errores y aumentar la productividad en las proyecciones de cáncer cervical [25]. En el artículo “Automated threshold-based 3D segmentation versus short-axis planimetry for assessment of global left ventricular function with dual-source MDCT” se realiza una comparación para evaluar el desempeño del software para umbralado basado en segmentación en 3 dimensiones del ventrículo izquierdo usando desarrollo de región contra el tradicional método de Simpson (basado en ejes de dos dimensiones) [26]. El artículo “Automatic Liver Segmentation based on Shape Constraints and Deformable Graph Cut in CT Images” publicado en al año 2015 por la IEEE (Instituto de Ingeniería Eléctrica y Electrónica) propone un método que consiste en tres pasos principales: preprocesamiento, inicialización de modelos y detección exacta de la superficie. El modelo principal es deformado usando PDM (3D point distribution model) y para detectar exactamente los límites del hígado, se desarrolla un segmentado a base de graph cut deformable hasta progresivamente encontrar la superficie óptima con el mínimo de pérdida posible [27]. Desde otro enfoque, el artículo “Segmentación automática tridimensional de estructuras pulmonares, en imágenes de tomografía computarizada” publicado en la Revista Latinoamericana de Hipertensión en el año 2015 propone una técnica para la segmentación automática en 3–D de estructuras pulmonares (tráquea, bronquios y pulmones) usando.
(25) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 16. imágenes de tomografía computarizada multicapa. La técnica se fundamenta en el realce por similaridad global y se divide en 2 etapas: Filtrado y Segmentación [28]. En el artículo “Image Segmentation by Using Thershod Techniques” publicado en Journal of Computing, volumen 2 en el año 2010, se emprende el estudio de técnicas de segmentación de imágenes utilizando cinco métodos de umbralado: método de la media, método P-tile, técnica dependiente del histograma (HDT), técnica de maximización del borde (EMT) y Técnica visual. Además, se comparan entre sí para elegir la mejor técnica de segmentación de imágenes por umbral [29]. En el artículo “Normalized Cuts and Image Segmentation” publicado por la IEEE se desarrolla un algoritmo de agrupación basado en la opinión de que la agrupación perceptiva debe ser un proceso que tiene como objetivo extraer impresiones globales de una escena y proporciona una descripción jerárquica al tratar el problema de la agrupación como un problema de particionamiento gráfico [30]. En el artículo “Random Walks for Image Segmentation” publicado por la IEEE se presenta un nuevo algoritmo para la segmentación de imágenes basado, de manera general, en un pequeño conjunto de píxeles pre-etiquetados. Estos píxeles pre-etiquetados se pueden crear interactivamente o pueden ser generados automáticamente para un propósito particular [31]. Por último, en el artículo “Supervised methods for perfect segmentation in medical images” se plantea el problema de la segmentación perfecta para las imágenes médicas con regiones de límites ambiguos a través del diseño de clasificadores de aprendizaje automático para identificar límites entre texturas similares en imágenes de escala de grises, con vistas a su uso en la conducción de herramientas de segmentación y la construcción de un interactivo marco de contorno [32].. 1.4 Conclusiones parciales En este capítulo quedó expuesta brevemente la historia de la tomografía computarizada y del desarrollo de hardware y software que la acompaña. Se caracterizaron los diferentes tipos de artefactos presentes en las imágenes de TC, así como las principales fuentes que los originan y se identifican las técnicas más eficaces para su correcto aislamiento de las imágenes finales en el afán de lograr un diagnóstico médico acertado..
(26) PRINCIPIOS BÁSICOS DE LA TOMOGRAFÍA COMPUTARIZADA Y LA SEGMENTACIÓN DE IMÁGENES. 17. Además, se hizo una breve introducción a la segmentación de imágenes y finalmente se realizó una reseña de los principales avances del segmentado de imagen en la actualidad quedando marcada la importancia que posee este proyecto encaminado al mejoramiento de imágenes. médicas. utilizando. los. métodos. globales. de. segmentación..
(27) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. CAPÍTULO 2. Segmentación. de. imágenes. por. umbralado global, principales herramientas y técnicas utilizadas La segmentación de imágenes es el primer paso y fundamental en los sistemas de procesamiento de imágenes, condicionando el éxito de los siguientes estados, con el objetivo de la localización y delineación automática de estructuras, objetos y regiones de interés dentro de una imagen, teniendo el reto de extraer de manera eficaz estos objetos degradando lo menor posible la calidad de la imagen. Existen varios métodos de segmentación de imágenes basados en análisis de texturas, morfología, curvas deformables, desarrollo de regiones, gráficos y umbralización, entre otros. En este capítulo se realiza un breve bosquejo de los métodos globales de umbralización. Además, se expone la fundamentación matemática de cada uno de los algoritmos de segmentación que se utilizan en el proyecto y su implementación en MatLab. También se hace referencia a las fuentes de las imágenes utilizadas y se explican las métricas a través de las cuales fueron evaluadas.. 2.1 Métodos globales de umbralización El umbralado es uno de muchos métodos utilizados para segmentar imágenes, ampliamente utilizado cuando se desea diferenciar un primer plano del fondo de una imagen. Seleccionado un valor umbral adecuado, la imagen de nivel de grises puede convertirse en una imagen binaria que contiene información esencial de la posición y la forma del objeto de interés que se desea extraer. La ventaja de obtener primeramente la imagen binaria es que reduce la complejidad de los datos y simplifica el proceso de reconocimiento y clasificación de los píxeles que pertenecen al primer plano y los que pertenecen al fondo. El principal reto del umbralado, viene dado, en escoger el valor de umbral que permita diferenciar más claramente el fondo del primer plano de la imagen sin degradar la calidad de la misma. Los métodos de umbralado global utilizan un solo valor umbral para toda la.
(28) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 19. imagen y para obtenerlo se basan en propiedades globales de la imagen como textura, color, intensidad o histogramas [29]. Para el desarrollo de este proyecto fueron empleados cinco algoritmos de umbralado global, de una muestra inicial de once, debido a que estos cinco fueron los que no presentaron conflictos con los otros softwares utilizados en la investigación.. 2.1.1 Principales técnicas de segmentación de imágenes por umbralado global El primero de los algoritmos utilizados en la investigación es BCV (between-class variance), este algoritmo para detectar los bordes en una imagen, primeramente, realiza una aproximación, donde los bordes están marcados en los máximos de la magnitud de la pendiente de una imagen gaussiana, de forma que si se quiere detectar un borde con una orientación particular se crea una máscara de dos dimensiones para esta orientación, obtenida, por la convolución de una función lineal de detección de bordes alineada normalmente hacia la dirección del borde que se desea detectar, con la función de una proyección paralela a la dirección del borde deseado. El procedimiento matemático para detectar los bordes puede ser resumido en las siguientes ecuaciones, haciendo cero la primera se obtiene su localización, y resolviendo la segunda se obtiene su magnitud [33]. 𝜕2 𝜕𝑛2. 𝐺∗𝐼 = 0. |𝐺𝑛 ∗ 𝐼| = |∇(G ∗ I)| 𝐺=𝑒. 𝑋2 +𝑌2 (− 2 ) 𝜎. (2.1) (2.2) (2.3). Donde * significa convolución, 𝐺𝑛 es tomada como la primera derivada en la dirección n de la función gaussiana de dos dimensiones, I representa la imagen a la que se le desea detectar el borde, mientras que, la ecuación (2.3) es la función gaussiana de dos dimensiones X y Y. El segundo algoritmo utilizado es el desarrollado por Kittler en el año 1986 donde un umbral es seleccionado para minimizar el número de clasificaciones erróneas entre dos distribuciones de variaciones y proporciones normales [34]. Este método asume un modelo gaussiano mezclado, comienza eligiendo arbitrariamente un umbral inicial T, calculando el error entre sus dos extremos y encontrando el mínimo punto de error de T, el cual es usado.
(29) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 20. como valor umbral. El método de mínimo error de umbral solo trabaja en histogramas bimodales. En la función implementada, T es interpretado de una manera diferente que en el artículo donde se expone el algoritmo original ya que se considera como el límite inferior de la segunda clase de píxeles en lugar del límite superior de la primera clase. Esto significa que una intensidad de valor T es tomada como si estuviera en la misma clase de las altas intensidades en lugar de las de bajas intensidades. El desarrollo matemático es el siguiente: 𝑇𝑜𝑝𝑡 = 𝑎𝑟𝑔 𝑚𝑖𝑛 {𝑃(𝑇)𝑙𝑜𝑔𝜎𝑓 (𝑇) + [1 − 𝑃(𝑇)]𝑙𝑜𝑔𝜎𝑏 (𝑇) − 𝑃(𝑇)𝑙𝑜𝑔𝑃(𝑇) − [1 − 𝑃(𝑇)]log[1 − 𝑃(𝑇)]. (2.4). Donde 𝜎𝑓 es la desviación estándar del primer plano y 𝜎𝑏 es la desviación estándar del fondo. El tercer algoritmo utilizado es el llamado Kurita 92 o máximo umbral de probabilidad global basado en modelos de mezcla de población [35]. Este modelo gira entorno del umbralado estándar propuesto por Otsu, que está basado en criterios de discriminantes y también en minimizar la media de errores entre la imagen original y la resultante imagen binaria, es equivalente a maximizar la probabilidad de la distribución condicional en el modelo de mezcla de población, bajo la condición de una distribución normal con una varianza común. El algoritmo puede ser descrito usando la siguiente fórmula matemática: ∗ ∗ 𝐽𝑀 (𝑙) = 𝑚𝑖𝑛𝑀−1<𝑘𝑀−1 {𝐽𝑀−1 (𝑘𝑀−1 ) + 𝑔(𝑘𝑀−1 )}. (2.5). ∗ Donde 𝐽𝑀 es el umbral óptimo, K son las clases de píxeles en los que es particionada la. imagen y 𝑔son los valores discretos de nivel de grises de cada pixel. El cuarto algoritmo usado es conocido como Ridler 78, donde se considera que, idealmente, si un objeto tiene un nivel de gris promedio diferente que la zona que lo circunda el efecto del umbralado producirá un objeto blanco sobre un fondo negro o un objeto negro sobre un fondo blanco[36]. Si un objeto está localizado dentro de un cuadro de imagen, sin tener ningún conocimiento areca su ubicación, se considera como primera aproximación que las cuatro esquinas de la escena contienen el fondo y las partes sobrantes contienen el objeto de interés (fig. 2.1)..
(30) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 21. Fig. 2.1 Estimación inicial del fondo y el objeto [36].. Fig. 2.2 Diagrama semántico de selección iterativa del umbral [36]. Luego se toma una función conmutativa f(s) como ruta para digitalizar la imagen en uno de dos integradores. El mecanismo es descrito como referencia en el diagrama semántico que se ofrece con anterioridad (Fig. 2.2). La señal controladora del switch funciona como la señal conmutadora f(s) y es de hecho un arreglo umbralado de puntos de la imagen. Si f(s)= 0, la señal de entrada a la imagen alimenta al integrando I y es considerada como parte del fondo. Por otro lado, si f(s)=1, el integrador II recibe la señal, que ahora representa el objeto. Cuando el elemento final del objeto de la imagen de entrada es recibido, el integrador de salida es promediado para encontrar un valor umbral L. La escena obtenida es cuantificada negro o blanco teniendo en cuenta el valor de L, y la silueta producida es usada como una nueva función de conmutación para una nueva iteración. Un nuevo umbral L1 es derivado, y la imagen es dividida adecuadamente de acuerdo a los resultados para.
(31) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 22. obtener otra función de conmutación. El proceso es repetido hasta que la función de conmutación de entrada se repita en futuras iteraciones [36]. en cada iteración n un nuevo umbral 𝑇𝑛 es establecido usando el. Matemáticamente. promedio de los valores del fondo y primer plano de la imagen y las iteraciones terminan cuando el valor |𝑇𝑛 − 𝑇𝑛+1 | se hace lo suficientemente pequeño. El valor umbral óptimo puede ser obtenido de la siguiente manera: 𝑇𝑜𝑝𝑡 = lim. 𝑚𝑓 (𝑇𝑛 )+𝑚𝑏 (𝑇𝑛 ) 2. 𝑛→∞ 𝑇. (2.6). 𝑛 𝑚𝑓 (𝑇𝑛 ) = ∑𝑔=0 𝑔𝑝(𝑔). (2.7). 𝑚𝑏 (𝑇𝑛 ) = ∑𝐺𝑔=𝑇𝑛+1 𝑔𝑝(𝑔). (2.8). Donde G es el máximo valor de luminancia de la imagen, g son los valores que puede tomar la luminancia de la imagen y 𝑝(𝑔) es una función de probabilidad cumulativa. El último de los algoritmos utilizados es el llamdo Yanni 94 [37], en este método se inicializa el punto medio entre dos supuestos picos del histograma como: 𝑔𝑚𝑖𝑑 =. (𝑔𝑚á𝑥 + 𝑔𝑚í𝑛 )⁄ 2. (2.9). Donde 𝑔𝑚á𝑥 es el mayor nivel de gris distinto de cero, mientras que, 𝑔𝑚í𝑛 es el menor nivel de gris. Entonces (𝑔𝑚á𝑥 − 𝑔𝑚í𝑛 ) es el espacio entre los valores distintos de cero del histograma. El valor medio es actualizado usando la media de los valores de los dos picos del histograma a la derecha y a la izquierda: ∗ 𝑔𝑚𝑖𝑑 =. (𝑔𝑝𝑒𝑎𝑘1 + 𝑔𝑝𝑒𝑎𝑘2 )⁄ 2. (2.10). Todo este procedimiento puede ser resumido mediante la siguiente expresión matemática: 𝑔∗. 𝑚𝑖𝑑 𝑇𝑜𝑝𝑡 = (𝑔𝑚á𝑥 − 𝑔𝑚í𝑛 ) ∑𝑔=𝑔 𝑝(𝑔) 𝑚í𝑛. (2.11). Para la realización de los experimentos de este proyecto estos cinco algoritmos fueron modificados e implementados en el software de análisis matemático MatLab debido a las.
(32) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 23. facilidades que presenta el mismo para el manejo de matrices y la representación de datos y funciones.. 2.2 Implementación de los algoritmos en MatLab Las modificaciones realizadas a estos algoritmos están justificadas en la necesidad de utilizarlos para procesar imágenes con valores de luminosidad que difieren marcadamente de una imagen a otra, para compensar esto, se introdujo en los que lo necesitaran un valor “k”, que se minimiza tanto como se necesite para imágenes oscuras y se eleva para imágenes claras; y se les introdujo a todos los algoritmos utilizados un valor entero “Nbins”, comprendido entre 1 y 256, que representa la cantidad de divisiones del histograma que se empleará para obtener los parámetros necesarios en su funcionamiento. Por lo tanto, para el correcto funcionamiento de los algoritmos se hace necesario introducir las variables: Imagen: la escala de grises de la imagen que se desea umbralar. Imagen puede ser un arreglo de dos dimensiones de tamaño M x N y su clase puede ser double, uint8 o uint16. k: número Real positivo mayor que 0 que se maximiza para imágenes claras y se minimiza para imagines oscuras. El valor por default de esta variable es k=1. Nbins: número de divisiones del histograma. El valor por default de esta variable es Nbins = 256. **En el caso del algoritmo Yanni 94 no es necesario introducirle la variable k. Todos estos algoritmos devuelven una imagen umbralada a los valores correspondientes y una variable que contiene el valor de los umbrales utilizados, en el algoritmo Yanni 94 esta variable contiene un mapa de umbral, que no es más que un arreglo del mismo tamaño que la variable Imagen introducida, con los valores de umbralado en cada punto. Los valores de k y Nbins con los que se obtienen resultados satisfactorios en el proceso de segmentación tanto de metales como de artefactos, se introducen con sus respectivos algoritmos en el software, GISMAR. Este software se encuentra en proceso de publicación, pero, con él se han obtenido muy buenos resultados en el procesamiento de imágenes, debido a que es capaz de integrar los resultados de los procesos de segmentación de imágenes con rasgos de la imagen original, para eliminar los artefactos de manera eficiente..
(33) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 24. Las imágenes resultantes obtenidas en GISMAR se implantan en un nuevo algoritmo, también implementado en MatLab, nombrado ROI, a este algoritmo se le introduce sobre la imagen una posición X y Y dada en píxeles, a partir de la cual se construye una ROI rectangular, de un tamaño conforme a las propiedades de cada imagen. Dicha ROI, no es más que una porción de imagen, que se evalúa empleando métricas encargadas de comprobar la calidad de las imágenes obtenidas en el GISMAR. Con el objetivo de contar con la mayor cantidad de información posible, y de que esta información fuera fiable a la hora de realizar un estudio referente a la calidad de las imágenes, las ROIs fueron tomadas del mayor tamaño posible evitando siempre en ellas la presencia de artefactos marcados con dureza y metales. Para realizar esta investigación se hace imprescindible la utilización de imágenes de TC de regiones anatómicas representativas de las distintas composiciones de tejido y hueso del cuerpo humano, afectadas por artefactos metálicos. Con el fin de garantizar la integridad y validez de nuestra investigación los datos utilizados en ella provienen de fuentes reconocidas y, por lo tanto, confiables.. 2.3 Adquisición de las imágenes de TC empleadas Los datos de TC para esta investigación fueron obtenidos desde dos escáneres de TC distintos: a kV on-board imaging (OBI) system integrated in a TrueBeam TM medical linear accelerator (Varian Medical System, Palo Alto, CA, USA) y en el escáner Siemens SOMATOM Sensation 16 usando geometría helicoidal (Santa Clara, Cuba). Los pacientes con empastes dentales fueron escaneados usando el sistema OBI con el tipo de filtro “Body filter”, kernel estándar, corriente de Tubo de 250 mA y voltaje pico de 120kVp, en el caso de los pacientes de implantes de cadera y semilla, fueron escaneados con “Body filter”, kernel estándar, corriente de Tubo de 150 mA y voltaje pico de 120kVp. Otros pacientes con empastes dentales fueron escaneados en el tomógrafo Siemens SOMATOM Sensation 16 y se utilizó el filtro “WEDGE_2”, kernel “'H31s”, corriente de tubo de 226mA y un voltaje pico de 120kVp. Las matrices de las imágenes reconstruidas fueron de 512 x 512 píxeles en ambos escáneres. Los tamaños de píxeles usados fueron 1mm x 1mm para OBI y 0.776mm x 0.77mm para Siemens SOMATOM Sensation. La distribución de los sets de datos tomados para diferentes regiones anatómicas fueron las siguientes: tres implantes de.
(34) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 25. semilla, tres implantes de cadera y tres empastes dentales adquiridos usando OBI; y once empastes dentales adquiridos usando Siemens SOMATOM Sensation. El maniquí utilizado simula la región de la cadera con dos implantes metálicos y fue escaneado en el escáner de Siemens SOMATOM en modo helicoidal usando las siguientes especificaciones: voltaje de tubo de 130kVp, corriente de tubo de 138 mA, cortes de 1mm de espesor, circunvolución de kermel 'B40s' y un tamaño de pixel de 0.87 x 0.87 mm. La matriz de las imágenes reconstruidas fue de 512 x 512 píxeles. Todas estas imágenes originales fueron modificadas por los distintos algoritmos con el fin de eliminar los artefactos presentes en ellas, haciéndose necesario evaluar la calidad de las mismas para poder tasar el desempeño de los algoritmos de segmentación.. 2.4 Evaluación de las imágenes Las imágenes obtenidas usando GISMAR fueron evaluadas por dos observadores independientes, cada uno con más de 10 años de experiencia clínica, ajenos a todos los datos del paciente y a los parámetros de las imágenes. Las imágenes fueron visualizadas bajo las mismas condiciones, en orden aleatorio, y revisadas en la ventana de tejido suave (nivel de ventana 20 HU, ventana con 400 HU) y la ventana de huesos (nivel de ventana 300 HU, ventana con 2,500 HU). Las mismas fueron mostradas en un monitor de 23” LED backlight con una resolución de 1920 x 1080. Los observadores evaluaron las imágenes desde una distancia aproximada de 2-2.5 veces la longitud de la pantalla y los experimentos fueron realizados en un ambiente oscuro (por debajo de los 25 lux). Los dos observadores evaluaron 121 imágenes tomográficas (10 originales + 111 modificadas por el algoritmo GISMAR), la interpretabilidad de diagnóstico se evaluó en una escala de 5 puntos. La calidad de la imagen para diagnóstico médico fue igualmente evaluada en una escala desde 1 hasta 5 puntos (1, calidad de la imagen severamente reducida, sin calidad ni posibilidad de diagnóstico; 2, calidad de imagen marcadamente reducida, interpretabilidad de diagnóstico deteriorada; 3, calidad de imagen y interpretabilidad de diagnóstico aceptable; 4, buena calidad de imagen, con alta certeza de diagnóstico; 5, excelente calidad de imagen con completa interpretabilidad de diagnóstico). [38], [39]..
(35) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 26. Con el propósito de asegurar la correspondencia inter-observador fue utilizado el método de Cohen’s kappa. Los valores de k entre 0.01–0.20 son considerados indicador de ligera correspondencia, valores entre 0.21–0.40 revelan una correspondencia cercana, entre 0.41– 0.60 muestran correspondencia moderada, entre 0.61–0.80 correspondencia sustancial y entre 0.81–1.00 casi perfecta correspondencia. Los análisis estadísticos fueron desarrollados usando el software estadístico (SPSS, versión 22.0; IBM, Chicago, IL, USA). Para todos los análisis estadísticos, los valores de p por debajo de 0.05 son considerados representantes estadísticos de diferencias significativas. Nueve regiones de interés (ROIs) fueron trazadas en las imágenes de TC. Los tamaños usados fueron 200 x 200 píxeles para los maniquíes, 150 x 150 para las imágenes de hígado. En las imágenes de cráneo fueron usados los tamaños de 180x 180 píxeles, 220 x 220 píxeles y 210 x 210 píxeles respectivamente, para los empastes dentales se usaron 200 x 200 píxeles y 250 x 250 píxeles, mientras que para el resto de las imágenes de cabeza se usaron ROIs de 100 x 100 y 120 x 120 píxeles respectivamente; y para las imágenes de abdomen se usaron 180 x 180 píxeles. Para evaluar objetivamente las imágenes obtenida del maniquí se utiliza una imagen de referencia que no ha sido contaminada con ruido ni artefactos, en conjunto de cinco métricas con las que se han obtenido excelentes resultados en el campo de la evaluación de la calidad de las imágenes. La primera de ellas es GMSD [40] (magnitud de desviación de gradiente de similaridad), esta métrica emplea mapas locales de calidad de imagen, basados en la variación global de los gradientes de similaridad, para obtener una predicción de la calidad de la imagen; la segunda y la tercera son IWPSNR [41] (información contenida en el muestreo de los picos de la relación señal a ruido) e IWMSE [41](información contenida en el muestreo MSE),estas dos métricas utilizan la transformada Laplace piramidal. La cuarta métrica es WSNR (evaluación de la relación señal a ruido) y por último OSS-PSNR [42] (evaluación del desempeño de los picos de la relación señal a ruido).. 2.5 Conclusiones parciales En este capítulo quedó expuesto el fundamento matemático de cada uno de los algoritmos de segmentación utilizados en la investigación, con el objetivo de poder interpretar con mayor facilidad los resultados de la investigación. Además, se explicaron cuáles fueron las.
(36) SEGMENTACIÓN DE IMÁGENES POR UMBRALADO GLOBAL, PRINCIPALES HERRAMIENTAS Y TÉCNICAS UTILIZADAS. 27. modificaciones realizadas a los algoritmos originales para su implementación en MatLab. Se fundamentaron las especificaciones bajo las que fueron obtenidas las imágenes originales con que se trabajan en el proyecto, así como, el hardware que las obtuvo y la manera en que fueron organizados los resultados en el proceso de adquisición de datos, para garantizar la validez de la investigación. Se presentan, también, las condiciones y escalas bajo las que los observadores evaluaron las imágenes y se explican las métricas para comprobar la calidad de cada una de ellas..
(37) CAPÍTULO 3. COMPARACIÓN DE LOS ALGORITMOS UTILIZADOS PARA LA SEGMENTACIÓN DE IMÁGENES DE TC AFECTADAS POR IMPLANTES METÁLICOS. CAPÍTULO 3. Comparación de los algoritmos utilizados para la segmentación de imágenes de TC afectadas por implantes metálicos. En el presente capítulo se exponen los resultados de los distintos algoritmos de segmentación de imágenes de TC empleados en la investigación, con el objetivo de comparar los resultados y determinar, cuál de los algoritmos presentó un mejor desempeño. Se muestran, además, los valores introducidos y los resultados obtenidos con los algoritmos GISMAR y ROI para evaluar la calidad de las imágenes reales que fueron modificadas. Mientras que, para las imágenes de maniquí de cadera, se muestra la evaluación obtenida para cada uno de los algoritmos de segmentación, usando las cinco métricas de calidad expuestas en el capítulo anterior. En ambos casos se evalúa la calidad subjetiva de las imágenes obtenidas, a través de una comparación de las evaluaciones proporcionadas por los dos observadores.. 3.1 Resultados de los algoritmos utilizados para segmentar artefactos y el metal en imágenes de TC afectadas por implantes metálicos En la tabla 3.1 se encuentran los valores umbrales utilizados para segmentar el metal y artefactos, separados por regiones, como se puede apreciar, todos los algoritmos presentes en la investigación manifestaron resultados satisfactorios para segmentar el metal, y a pesar de que, todos lograron segmentar los artefactos, no lo hicieron con la misma eficacia. Se comprueba además que, en un mismo algoritmo, una vez que se encuentra el valor óptimo de Nbins, ya sea para segmentar metal o artefacto, este prácticamente no varía, sin importar la naturaleza de la imagen; por otra parte, el valor k es el encargado de ajustar el umbral dependiendo de la luminancia u oscuridad (contenido de frecuencias) de la imagen. Esto se debe a que, si el histograma posee pocas divisiones, cada una de ellas representa a una mayor cantidad de píxeles de la imagen, lo que hace que se diferencien con mayor facilidad las divisiones del histograma que encierran los niveles de grises que se encuentran con.
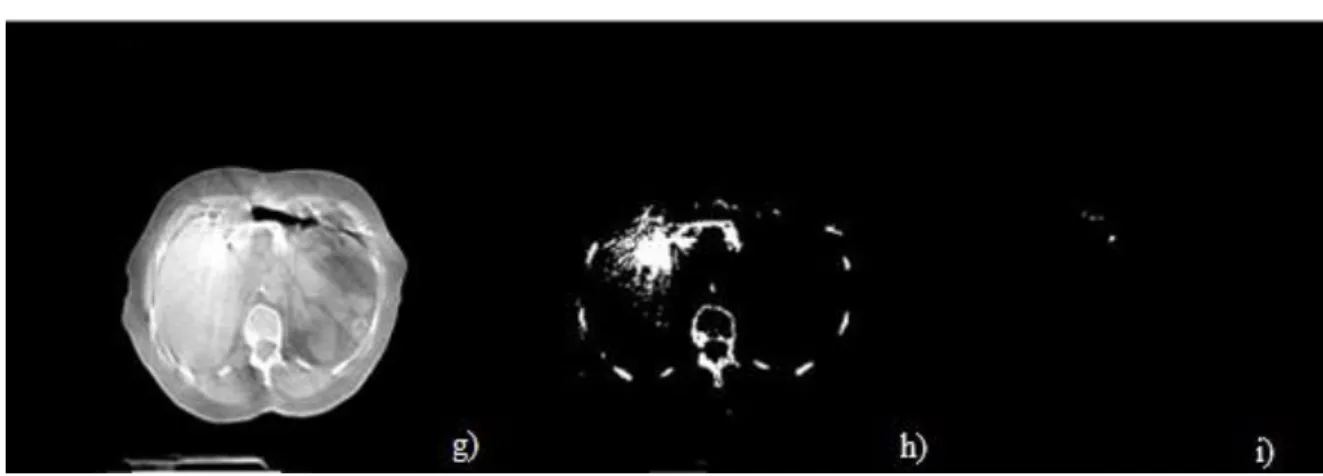
(38) COMPARACIÓN DE LOS ALGORITMOS UTILIZADOS PARA LA SEGMEMTACIÓN DE IMÁGENES DE TC AFECTADAS POR IMPLANTES METÁLICOS. 29. mayor frecuencia en la imagen, de los que tienen menor frecuencia de presencia, lo que hace posible obtener un umbral. Obsérvese que cuando el valor de Nbins = 256 las variaciones entre los valores de k son mayores que con valores de Nbins bajos. En la Fig. 3.1 se muestran algunos de los resultados obtenidos mediante el algoritmo Kitler 86, el cual se desempeñó correctamente en todas las regiones anatómicas, segmentando claramente los artefactos y el metal.. Fig. 3.1 a) Imagen original del maniquí de cadera. b) Segmentación de artefactos usando Kitler 86. c) Segmentación de metal con Kitler 86.. Fig. 3.1 d) Imagen original. e) Segmentación de artefactos usando Kitler 86. f) Segmentación de metal con Kitler 86..
(39) COMPARACIÓN DE LOS ALGORITMOS UTILIZADOS PARA LA SEGMEMTACIÓN DE IMÁGENES DE TC AFECTADAS POR IMPLANTES METÁLICOS. Tabla 3.1 Valores umbrales por imágenes con los que se obtuvieron los mejores resultados segmentando metal y artefactos. REGIONES ANATÓMICAS UMBRALES PHANTOM DE CADERA CABEZA HÍGADO. ABDOMEN. METAL ARTEFACTO METAL ARTEFACTO METAL ARTEFACTO METAL ARTEFACTO. BCV KITLER 86 KURITA 92 RIDLER 78 YANNI 94 NBINS K NBINS K NBINS K NBINS K NBINS K 1 1.25 256 13 2 2.5 2 1.25 1.25 2 1 256 5.5 2 1 4 1 0.46 2 1.25-3.98 256 12.4-127 2 y 256 3-6.79 4 2.7-3.81 2-2.7 2 1.05-1.1 256 3.4-34 2 1-1.15 4 1-1.1 0.46-0.87 2 2 256 44 2 2 4 1.9 1.4 2 1 256 24 2 1.13 4 1 0.75 2 3 256 15 2 3 4 3 1.7 2 1.065 256 5 2 1.05 4 1.05 0.6. Tabla 3.2 Evaluación objetiva de las imágenes de maniquí de cadera. ALGORITMOS UMBRALES BCV Kitler 86 Kurita 92 Ridler 78 Yanni 94. METAL ARTEFACTO METAL ARTEFACTO METAL ARTEFACTO METAL ARTEFACTO METAL ARTEFACTO. VALORES NBINS K 1 1.25 2 1 256 13 256 5.5 2 2.5 2 1 2 1.25 4 1 1.25 0.46. GMSD. IWMSE. IW-PSNR. WSNR. OSS_PSNR. 54.9. 81.239. 17.228. 37.259. 23.621. 54.884. 81.527. 17.243. 37.285. 23.639. 54.9. 81.239. 17.228. 37.259. 23.621. 54.879. 81.222. 17.227. 37.258. 23.619. 54.897. 81.024. 17.216. 37.241. 23.607. 30.
(40) COMPARACIÓN DE LOS ALGORITMOS UTILIZADOS PARA LA SEGMEMTACIÓN DE IMÁGENES DE TC AFECTADAS POR IMPLANTES METÁLICOS. 31. Fig. 3.1 g) Imagen original. h) Segmentación de artefactos usando Kitler 86. i) Segmentación de metal con Kitler 86.. Fig. 3.1 j) Imagen original. k) Segmentación de artefactos usando Kitler 86. l) Segmentación de metal con Kitler 86. Estos valores umbrales y los algoritmos con los que se obtuvieron, en combinación con el GISMAR, modifican las imágenes originales para eliminar los artefactos. Las imágenes resultantes son evaluadas objetiva y subjetivamente.. 3.2 Evaluación objetiva de las imágenes derivadas del maniquí de cadera La evaluación las imágenes obtenidas a partir del maniquí de cadera se encuentran reflejadas en la tabla 3.2, los resultados obtenidos se basan en cinco métricas que utilizan una imagen de referencia que no ha sido contaminada con ruido o artefactos, para así poder determinar la calidad de las imágenes que se derivan de ella. De la tabla se aprecia, que las cinco métricas antes mencionadas no revelan diferencias muy marcadas entre los algoritmos, sin embargo, muestra una ligera superioridad de Kitler 86, al presentar mejores resultados que sus homólogos en cuatro de las cinco métricas. Esto se debe, a que el.
Figure


![Fig. 1.6 Imagen de TC de un maniquí de hombro, mostrando artefactos de insuficiencia de fotones [16]](https://thumb-us.123doks.com/thumbv2/123dok_es/7398366.468150/19.918.352.609.388.641/fig-imagen-maniquí-hombro-mostrando-artefactos-insuficiencia-fotones.webp)
+7
![Fig. 1.7 Imagen de TC de un paciente con un implante de metal en la columna reconstruida sin corrección [16]](https://thumb-us.123doks.com/thumbv2/123dok_es/7398366.468150/20.918.367.597.99.332/fig-imagen-paciente-implante-metal-columna-reconstruida-corrección.webp)
![Fig. 2.1 Estimación inicial del fondo y el objeto [36].](https://thumb-us.123doks.com/thumbv2/123dok_es/7398366.468150/30.918.334.630.101.278/fig-estimación-inicial-fondo-objeto.webp)



Documento similar
