Sistemas de radiocomunicaciones móviles
129
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA. Sistemas de Radiocomunicaciones Móviles Autor: Eduardo Fierro Viana Tutor: M.Sc. Hiram del Castillo Sabido Prof. Dpto. de Telecomunicaciones y Electrónica. Facultad de Ing. Eléctrica. UCLV. e-mail: [email protected]. Consultante: Dr. Jorge Matos Gómez Empresa Nacional Eléctrica. Sta. Clara.. Santa Clara 2004 "Año del 45 Aniversario del Triunfo de la Revolución".
(3) Hago constar que el presente trabajo fue realizado en la Universidad Central “Marta Abreu” de las Villas como parte de la culminación de los estudios de la especialidad de Telecomunicaciones y Electrónica autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. ________________ Firma del Autor. Los abajo firmantes, certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. ________________ Firma del Tutor.. _______________________ Firma del Jefe de Dpto. donde se defiende el trabajo.. ____________________ Firma del Responsable de Información Científico- Técnica..
(4) Pensamiento.
(5) “En los momentos de crisis sólo la imaginación es más importante que el conocimiento.”. Albert Einstein..
(6) Dedicatoria.
(7) A todos los que me han apoyado, en especial a mis padres y a mi novia..
(8) Agradecimientos.
(9) A todos los que me han apoyado durante estos años de estudio. A mis compañeros más allegados, en especial a Rassel (Pichi) por su amistad de todos estos años. A mi tutor por su valiosa ayuda brindada y asesoría incondicional..
(10) Resumen.
(11) Resumen. RESUMEN. En el presente trabajo de diploma se realiza una revisión bibliográfica que ofrece una panorámica de algunos de los sistemas de comunicaciones móviles más usados, no solo en nuestro país, sino también a nivel mundial, resaltando sus características más importantes. Los sistemas de interés tratados son: los sistemas PMR convencionales, sistemas de concentración de enlaces o Trunking, el sistema de posicionamiento global GPS y por último el sistema de telefonía celular GSM. De cada uno de ellos se abordan aspectos generales de su estructura típica, funcionamiento, descripción desde el punto de vista radioelectrónica del equipamiento utilizado, y métodos empleados. para la determinación del área de cobertura, llegando a. conformar un material didáctico y sintetizado donde se resume todo lo anteriormente citado..
(12) Índice.
(13) Índice. INDICE. INTRODUCCION ..........................................................................................................................1 CAPITULO 1 SISTEMAS PMR.....................................................................................................4 1.1 Introducción a los sistemas PMR. .......................................................................................4 1.2 Estructura de un sistema PMR. ...........................................................................................5 1.3 Componentes de un sistema móvil......................................................................................5 1.4 Bandas de frecuencia. .........................................................................................................6 1.4.1 Canalización..................................................................................................................7 1.5 Tipos de canales..................................................................................................................7 1.5.1 Canales símplex a una frecuencia. ...............................................................................7 1.5.2 Canales símplex a dos frecuencias...............................................................................8 1.5.3 Canales semidúplex. .....................................................................................................9 1.5.4 Canales dúplex..............................................................................................................9 1.6 Receptores satélites. .........................................................................................................10 1.7 Sistema de despacho. .......................................................................................................11 1.8 Señalización. .....................................................................................................................11 1.9 Programación. ...................................................................................................................12 1.10 Afectaciones en los sistemas radio móvil. .......................................................................13 1.10.1 Pérdidas por trayectoria. ...........................................................................................14 1.10.2 Desvanecimientos lentos. .........................................................................................14 1.10.3 Desvanecimientos rápidos. .......................................................................................14 1.11 Cálculo de la cobertura radioeléctrica. ............................................................................15 1.12 Descripción radioelectrónica de los equipos utilizados en los sistemas PMR................17 1.12.1 Equipos de servicio fijo..............................................................................................17 1.12.2 Equipos móviles. .......................................................................................................18 1.12.3 Obtención de la palabra digital. .................................................................................19 CAPITULO 2 SISTEMAS DE CONCENTRACION DE ENLACES .............................................20 2.1 Introducción a los sistemas de concentración de enlaces.................................................20 2.2 Servicios de un sistema troncal. ........................................................................................20 2.3 Tipos de sistemas Trunking...............................................................................................21 2.3.1 Asignación por mensaje. .............................................................................................21 2.3.2 Asignación por transmisión. ........................................................................................21. I.
(14) Índice. 2.3.3 Asignación mixta. ........................................................................................................21 2.4 Can al de control................................................................................................................22 2.5 Estructura de un sistema Trunking. ...................................................................................22 2.6 Dimensionamiento. ............................................................................................................23 2.7 Principales normas analógicas y digitales. ........................................................................24 2.7.1 MPT1327.....................................................................................................................25 2.7.2 TETRA.........................................................................................................................26 2.8 Configuraciones de un sistema Trunking bajo el estándar MPT1327. ..............................28 2.9 Operaciones básicas ejecutadas en una site. ...................................................................29 2.9.1 Validación....................................................................................................................29 2.9.2 Búsqueda del canal de control. ...............................................................................29 2.9.3 Confirmación del canal de control. ..............................................................................29 2.9.4 Registro. ......................................................................................................................30 2.9.5 Establecimiento de la llamada.....................................................................................30 2.9.5.1 Llamada local. .......................................................................................................30 2.9.5.2 Llamada intersite...................................................................................................31 2.9.5.3 Llamada telefónica. ...............................................................................................31 2.10 Estimación de la zona de servicio. ..................................................................................32 2.11 Descripción radioelectrónica del receptor y transmisor de un canal de una site de un sistema Trunking de la norma MPT1327.................................................................................32 CAPITULO 3 SISTEMA DE POSICIONAMIENTO GLOBAL ......................................................34 3.1 Introducción al sistema de posicionamiento global. ..........................................................34 3.2 Partes que conforman el sistema GPS..............................................................................35 3.2.1 Segmento espacial......................................................................................................35 3.2.2 Segmento de control. ..................................................................................................37 3.2.3 Segmento de usuario. .................................................................................................38 3.3 Tipos de servicio del sistema GPS. ...................................................................................38 3.3.1 Servicio de posicionamiento estándar.........................................................................38 3.3.2 Servicio de posicionamiento preciso. ..........................................................................38 3.4 Señales de los satélites GPS. ...........................................................................................38 3.5 Estructura de los datos del GPS.......................................................................................39 3.5.1 Datos que constituyen el mensaje de navegación. ....................................................40 3.6 Sincronización de fase de código. .....................................................................................40 3.7 Estimación de la posición, velocidad y tiempo. .................................................................41. II.
(15) Índice. 3.8 Fuentes de error en el GPS...............................................................................................42 3.9 GPS diferencial..................................................................................................................45 3.10 Tipos de receptores. ........................................................................................................45 3.10.1 Receptor secuencial..................................................................................................46 3.10.2 Receptor multicanal...................................................................................................46 3.10.3 Receptor con canales multiplexados.........................................................................46 3.11 Estructura general de un receptor GPS...........................................................................46 CAPITULO 4 SISTEMA DE TELEFONIA CELULAR GSM ........................................................48 4.1 Introducción a los sistemas de telefonía móvil celular.......................................................48 4.2 Aspectos generales de la estructura celular......................................................................50 4.2.1 Estructura celular. .......................................................................................................50 4.2.2 Sectorización...............................................................................................................51 4.2.3 Técnicas de acceso al medio. .....................................................................................51 4.3 Sistema GSM.....................................................................................................................52 4.4 Arquitectura del sistema GSM. ..........................................................................................53 4.4.1 Estación móvil. ............................................................................................................54 4.4.2 Subsistema de estación base. ....................................................................................54 4.4.3 Subsistema de red. .....................................................................................................54 4.4.4 Enlaces BTS-BSC-MSC. .............................................................................................55 4.5 Interfase radioeléctrica y estructura de los canales...........................................................56 4.5.1 Estructura de una ráfaga. ............................................................................................57 4.5.2 Canales de tráfico. ......................................................................................................58 4.5.3 Canales de control. .....................................................................................................58 4.6 Codificación de voz............................................................................................................60 4.7 Codificación de canal.........................................................................................................61 4.7.1 Codificación de los canales de voz. ............................................................................61 4.7.2 Codificación de los canales de datos. .........................................................................61 4.7.3 Codificación de los canales de control. .......................................................................62 4.8 Modulación. .......................................................................................................................62 4.9 Ecualización multitrayecto. ................................................................................................62 4.10 Saltos de frecuencia. .......................................................................................................63 4.11 Transmisión discontinua. .................................................................................................63 4.12 Recepción discontinua.....................................................................................................63 4.13 Control de potencia..........................................................................................................63. III.
(16) Índice. 4.14 Funciones implementadas por el sistema GSM. .............................................................64 4.14.1 Autenticación.............................................................................................................64 4.14.2 Cifrado.......................................................................................................................65 4.14.4 Traspaso. ..................................................................................................................65 4.14.3 Actualización de la posición y localización. ...............................................................66 4.15 Cálculo de la cobertura radioeléctrica. ............................................................................67 4.15.1 Herramientas y modelos actuales para el cálculo de la cobertura radioeléctrica......68 4.15.2 Cálculo de la cobertura de los sistemas celulares en Cuba......................................69 4.16 Descripción radioelectrónica del equipamiento usado en el sistema GSM. ....................70 CONCLUSIONES .......................................................................................................................73 RECOMENDACIONES...............................................................................................................74 REFERENCIAS BIBLIOGRAFICAS ...........................................................................................75 ANEXO 1 ....................................................................................................................................78 ANEXO 2 ....................................................................................................................................83 ANEXO 3 ....................................................................................................................................89 ANEXO 4 ....................................................................................................................................93 ANEXO 5 ....................................................................................................................................98 GLOSARIO .................................................................................................................................99. IV.
(17) Introducción.
(18) Introducción. INTRODUCCION. La utilización de las ondas radioeléctricas se reveló desde hace tiempo como el único medio eficaz de establecer comunicaciones con puntos móviles, y lo seguirá siendo durante mucho tiempo, ya que las ondas de radio gozan de la propiedad de salvar obstáculos y alcanzar distancias considerables, a pesar de que en todo su trayecto, entre emisor y receptor, se ven afectadas tanto por condiciones ambientales como por las características del entorno donde se propaga. Desgraciadamente el espectro radioeléctrico es un recurso limitado cuya utilización racional sólo ha sido posible mediante una reglamentación muy estricta que permite la optimización de la asignación de frecuencias. Este documento se centrará en las comunicaciones móviles, en las que emisor o receptor están en movimiento. La movilidad de los extremos de la comunicación excluye casi por completo la utilización de cables para alcanzar dichos extremos. Por tanto utiliza básicamente la comunicación vía radio. Esta se convierte en una de las mayores ventajas de las comunicaciones móviles: la movilidad de los extremos de la conexión, también es de gran importancia para la puesta en marcha del sistema de comunicaciones móviles el rápido despliegue que conllevan al no tener que llevar a cabo obras civiles de gran complejidad y elevados costos como son el tendido de cables hasta los usuarios y la construcción y ubicación de los soportes físicos (postes, túneles, etc.) para dichos fines. Las comunicaciones móviles son actualmente el área de crecimiento más rápido dentro del sector de las telecomunicaciones por lo que con la presente investigación se pretende enriquecer el conocimiento en el campo radioelectrónico de las comunicaciones móviles así como investigar sobre los métodos más apropiados para la determinación de las zonas de cobertura, dado que no se cuenta en estos momentos con ningún material condensado que de forma explícita nos ilustre o vincule la filosofía de funcionamiento de los sistemas de comunicaciones móviles, en particular los terminales o equipos de usuario, con la radioelectrónica que lleva a cabo estas funciones. Para llevar a cabo dicha investigación, se ha propuesto el cumplimiento de los siguientes objetivos.. 1.
(19) Introducción. Objetivos: Realizar un estudio de los sistemas de Radiocomunicaciones Móviles más utilizados: sistemas PMR convencionales, Trunking, Telefonía Celular y en particular GSM, y GPS, que incluye la descripción del equipamiento utilizado desde el punto de vista radioelectrónico y llegar a resultados sobre los métodos más idóneos para la determinación de las zonas de servicio en ciudades típicas cubanas. A fin de dar un correcto cumplimiento a los objetivos propuestos para este trabajo, se han planteado un grupo de tareas técnicas y de investigación, las cuáles se enumeran a continuación: 1. Búsqueda bibliográfica sobre los Sistemas de Comunicaciones Móviles, sus principales características, estructuras típicas de equipamiento y tendencias futuras. 2. Describir por temas en forma de monografías los siguientes aspectos: a) Tipos de sistemas y sus principales características, limitaciones y beneficios. b) Estructura a nivel radioelectrónico del equipamiento móvil y fijo. c) Estudio de métodos para el cálculo de zonas de servicio y conclusiones de aquel que se adecue más a nuestras condiciones. 3. Confección del informe final, en el cual se incluya una presentación en Power Point por cada temática. Estructura del trabajo. Este trabajo está estructurado de la siguiente forma: introducción, capitulario, conclusiones, recomendaciones, referencias bibliográficas, anexos. En cada uno de ellos se abordarán las siguientes temáticas: •. Capítulo 1: Estudio de los sistemas PMR convencionales, desde el punto de vista conceptual y del equipamiento radioelectrónico que se utiliza, donde se incluya la forma en que se determina la zona de servicio.. •. Capítulo 2: Estudio de los sistemas Trunking, desde el punto de vista conceptual y también haciendo énfasis en las características del equipamiento radioelectrónico que se utiliza en su implementación.. 2.
(20) Introducción. •. Capítulo 3: Estudio de los sistemas GPS, desde el punto de vista conceptual y del equipamiento radioelectrónico que se utiliza en su introducción.. •. Capítulo 4: Estudio de los sistemas móviles celulares, particularmente GSM, describiendo sus características conceptuales más importantes, así como una descripción desde el punto de vista radioelectrónico, e investigar sobre los métodos de cálculo de las zonas de servicio.. •. Conclusiones: Se realizará un análisis crítico de los resultados obtenidos a partir de los objetivos que se trazaron inicialmente.. •. Recomendaciones: Se harán recomendaciones que tengan como objetivo enriquecer el material a partir de los resultados obtenidos.. •. Referencias bibliográficas: Se hará un listado de las referencias bibliográficas consultadas siguiendo la metodología existente para este fin.. •. Anexos: Se expondrán los principales diagramas circuitales desde el punto de vista radioelectrónico y se adjuntarán las presentaciones en Power Point de cada temática.. 3.
(21) Capítulo 1.
(22) Capítulo 1. CAPITULO 1 SISTEMAS PMR 1.1 Introducción a los sistemas PMR. Los sistemas de radiocomunicaciones móviles permiten el intercambio de información entre terminales móviles, a bordo de vehículos o transportados por personas y terminales fijos a través de un medio de transmisión radioeléctrico, con unas características de calidad determinadas. Es en estos sistemas donde se puede aprovechar plenamente el carácter inalámbrico de los enlaces radioeléctricos y la movilidad inherente al mismo. A diferencia de los sistemas de radiocomunicaciones entre puntos fijos, los sistemas móviles son de cobertura zonal, pudiendo estar los terminales en cualquier punto del área de cobertura, ello implica una variación continua del trayecto de propagación, lo cual tiene una importancia decisiva en el diseño de los sistemas radiomóviles [1]. También conocido como radiocomunicaciones en grupo cerrado de usuarios, es un servicio de telefonía móvil que sólo se presta a un colectivo de personas, en una determinada zona geográfica. Hay dos modalidades del servicio. En la primera cada grupo de usuarios, y sólo ellos, utilizan una determinada frecuencia (sistemas convencionales). En la segunda el sistema se encarga de asignar las frecuencias libres de manera dinámica entre los diferentes grupos, por lo que no hay una correspondencia grupo-frecuencia (Trunking) [2]. Ver figura 1.1.. SISTEMAS PMR CONVENCIONALES. ABIERTOS. SELECTIVOS. TRUNKING. SELECTIVOS. Figura 1.1. Clasificación de los sistemas PMR.. Las redes móviles terrestres se iniciaron en ámbitos restringidos para el establecimiento de comunicaciones en tareas de despacho, para la gestión de actividades de flota de vehículos en aplicaciones tales como servicio de policías, mantenimiento de servicios públicos de distribución de agua, gas, electricidad, servicios de emergencia, ambulancia, protección civil, bomberos, control de tráfico, etc.. 4.
(23) Capítulo 1. Esta gama de aplicaciones ha dado lugar a los sistemas llamados de radiotelefonía privada, PMR (Private Mobile Radio), que se caracterizan porque tienen una cobertura básicamente local y no están conectados a la red telefónica pública conmutada [1]. 1.2 Estructura de un sistema PMR. La estructura conceptual de un sistema PMR de forma general, comprende una serie de terminales conectados al centro de control, bien directamente, o a través de una central PBX (Private Branch Exchange), una estación base y un conjunto variado de terminales móviles [1], como se puede ver en la figura 1.2.. Figura 1.2. Estructura de un sistema PMR.. Los operadores del centro de control manejan los terminales de comunicaciones de acuerdo con la estructura organizativa del servicio. 1.3 Componentes de un sistema móvil. Los sistemas móviles constan de los siguientes elementos: •. Estaciones fijas (FS, Fixed Station).. •. Estaciones móviles (MS, Mobile Station).. •. Equipos de control (CE, Control Equipment).. Las estaciones fijas las podemos dividir en 3 categorías: •. Estación base (BS, Base Station).. •. Estación de control (CS, Control Station).. •. Estación repetidora (RS, Repeater Station).. 5.
(24) Capítulo 1. A continuación se definirán los tipos de estaciones [1]. Estación base (BS): es una estación radioeléctrica fija, cuyo funcionamiento se controla directamente desde una unidad de control situada en un punto de control especificado. El control puede ser local o remoto. En ella se sitúan las unidades de recepción y transmisión. Estación de control (CS): es una estación fija operacional, cuyas transmisiones se utilizan para controlar automáticamente las emisiones o el funcionamiento de otra estación de radio en un emplazamiento específico. Estaciones repetidoras (RS): retransmiten las señales recibidas y por sus características técnicas y situación estratégica, permiten el logro de una cobertura determinada del sistema. Suelen funcionar de forma desatendida, tele controlándose en ocasiones desde otro punto fijo. Estaciones móviles (MS): es una estación radioeléctrica del servicio móvil prevista para su utilización en un vehículo en marcha o que efectúa paradas en puntos indeterminados. El término incluye a los equipos portátiles o de mano, que son aquellos que acompañan al usuario. Equipos de control (CE): lo forman los dispositivos necesarios para el gobierno de las estaciones de base, la generación y recepción de llamadas, localización e identificación de vehículos, transferencia de llamadas a la red telefónica privada, señalización de canales, etc. 1.4 Bandas de frecuencia. Las bandas de frecuencias utilizadas en los sistemas de radiocomunicaciones móviles pueden ser divididas de la siguiente forma: •. VHF (30 MHz - 300 MHz) Banda (136 - 174 MHz). •. UHF (300 MHz - 3 GHz) Banda 900 MHz (806 - 960 MHz) Banda 1800 MHz (1710-1785 y 1805-1880 MHz). Estas bandas de frecuencia son usadas indistintamente en muchos países, por ejemplo, en Cuba, es usada la banda de 136 MHz – 174 MHz para los sistemas PMR convencionales y la. 6.
(25) Capítulo 1. banda de 900 MHz para los servicios de Trunking en la parte baja de la banda (806 – 870 MHz) y GSM (Global System for Mobile Communication) en la alta (890 – 960 MHz). Sin embargo en Europa es utilizada la banda de 300 MHz – 450 MHz para los sistemas Trunking, manteniéndose aproximadamente igual el uso de las otras bandas. 1.4.1 Canalización. Se utilizan dos tipos de canalización, normal y estrecha. En la primera la separación de canales es de 25 KHz y en la segunda de 12.5 KHz. La modulación utilizada es de frecuencia de banda estrecha con desviaciones de frecuencia de 5 KHz y 2.5 KHz respectivamente y la máxima frecuencia de la señal moduladora es de 3 KHz [1]. 1.5 Tipos de canales. Los canales en los sistemas de radiocomunicaciones móviles pueden ser de tres tipos: 1.. Símplex (a una o dos frecuencias).. 2.. Semidúplex.. 3.. Dúplex.. A continuación pasaremos a explicarlos brevemente. 1.5.1 Canales símplex a una frecuencia. Utilizan la misma frecuencia F1 para cada sentido de transmisión como se ve en la figura 1.3. La transmisión y la recepción se efectúan en forma secuencial, en un sentido cada vez. Cuando se pulsa el mando pulsar para hablar, PTT (Press To Talk), de la estación radioeléctrica, el conmutador de antena conecta el transmisor a la antena y desconecta el receptor de ésta. Como solamente se utiliza una frecuencia, las transmisiones son del tipo “línea compartida” y cualquier equipo puede oír y hablar con cualquier otro dentro de la zona de cobertura mutua.. Figura 1.3. Canales símplex a una frecuencia.. Los canales símplex tienen la ventaja de su sencillez y aparentemente utilizan bien el espectro, ya que una sola frecuencia soporta ambos sentidos de transmisión. Como inconveniente 7.
(26) Capítulo 1. podemos mencionar la captura de una comunicación por otra, derivada de una interferencia cocanal intensa. Para el caso de estaciones de base símplex próximas físicamente, que operan en frecuencias F1, F2, F3, puede producirse una interferencia canal adyacente lo suficientemente fuerte como para interrumpir una comunicación en curso o impedir un posible enlace. Esto se soluciona haciendo una separación de frecuencias que debe ser de 4 a 5 MHz. 1.5.2 Canales símplex a dos frecuencias. Se establecen así canales a dos frecuencias F1 y F1’, figura 1.4, separadas entre sí de 4 a 5 MHz, como puede verse en la figura 1.5.. Figura 1.4. Canales símplex a dos frecuencias.. En este caso aunque dos estaciones estén próximas entre sí, como ambas transmiten por ejemplo en la frecuencia alta y reciben en la baja, no se producen efectos perjudiciales sobre sus receptores, debido a esa separación de frecuencias. En consecuencia, estos sistemas permiten una utilización más eficaz del espectro radioeléctrico.. Figura 1.5. Separación de frecuencias.. 8.
(27) Capítulo 1. 1.5.3 Canales semidúplex. Se configura la estación base de forma que retransmita las señales que recibe (procedimiento denominado talk - through, TT). En este caso la estación base funciona en dúplex y los móviles en símplex. La estación base transmite en F1 y recibe en F1’, y las móviles transmiten en F1’ y reciben en F1 (frecuencias cruzadas). La estación base dispone de un duplexor y está dispuesta para retransmitir automática y simultáneamente en F1 cualquier señal que originen las estaciones móviles en F1’, las móviles utilizan un conmutador de antena. Ver figura 1.6.. Figura 1.6. Canales semidúplex.. Con este sistema no es posible la comunicación directa móvil-móvil sin pasar por el repetidor. En ocasiones, para comunicaciones locales de corto alcance entre móviles, se habilita una frecuencia símplex situada en otro canal. Como la cobertura de una estación funcionando en TT puede ser amplia y tal estación puede activarse ante cualquier interferencia que reciba en F1’, propagando la interferencia a toda su zona de cobertura es habitual la explotación de las estaciones TT mediante tonos de control en frecuencias (sub - audio), por debajo de 300 Hz. Sólo se activará la estación TT cuando reciba una señal en F1’ acompañada del tono de apertura, que se mantiene mientras dura la comunicación. Puede compartirse una estación TT dada, por móviles de diferentes flotas o redes, utilizando cada móvil tonos específicos de apertura. Se dice entonces que la estación es un repetidor comunitario. 1.5.4 Canales dúplex. En estos sistemas, la estación base transmite en F1 y recibe en F1’, y la móvil transmite en F1’ y recibe en F1.. 9.
(28) Capítulo 1. Tanto la estación de base como las móviles disponen de duplexores para permitir la transmisión y recepción simultánea, véase en la figura 1.7.. Figura 1.7. Canales dúplex.. Con estos sistemas se requiere un radiocanal (pareja de frecuencias) diferente para enlazar cada móvil con la estación base, la cual debe ser multicanal, es decir, constar de tantos transceptores como canales se hayan establecido [1]. En este sistema tampoco es posible la comunicación directa. móvil-móvil sin pasar por la base. Este tipo de funcionamiento es. característico de los sistemas de telefonía celular. 1.6 Receptores satélites. Cuando se desea una cobertura amplia, tanto en el canal de ida (base a móvil) como en el de retorno (móvil a base), es necesario habilitar algún procedimiento parra lograr que aumente el retroalcance del móvil. Una solución muy eficaz es la utilización de una estación base (transmisora / receptora) y una serie de receptores, denominados satélites distribuidos por la zona de cobertura, como se puede ver en la figura 1.8, de forma que las transmisiones del móvil lleguen siempre al menos a uno de ellos. Las salidas de los receptores se llevan a través de enlaces por línea o radio punto a punto al centro de control, donde existe un dispositivo selector el cual según un criterio programado seleccionará una de las líneas y la conectará al control. El criterio de selección suele ser función de las especificaciones del sistema. Por lo general, se utiliza como parámetro el nivel de tonos subaudio que acompañan a la señal moduladora. De esta manera, sólo se escucha la señal de mejor calidad de todas las que provienen de los diferentes receptores satélites [1].. 10.
(29) Capítulo 1. Figura 1.8. Sistema con receptores satélites.. 1.7 Sistema de despacho. Es la estructura básica a partir de la cual se pueden desarrollar otros sistemas más complejos. Es un sistema con señalización convencional, que puede incluir la llamada selectiva. El sistema está formado por estaciones bases, estaciones móviles con conmutación manual de canales según la zona, y consola de operación [3], [1]. El. modo de comunicación utilizado es. semidúplex permitiendo la comunicación móvil a móvil a través del repetidor o de forma directa usando el modo símplex [3]. En la figura 1.9 se muestra la estructura del sistema.. Figura 1.9. Sistema de despacho.. 1.8 Señalización. En los sistemas PMR se implementa la señalización con el objetivo de darle solución a los problemas de confidencialidad. Hay varias formas de asegurar la privacidad, una de ellas es el sistema de señalización de control de tono continuo, CTCSS (Continuous Tone Controlled Signaling System), también conocido como QT (Quiet Tone), que es un conjunto de 32 tonos subaudio de los cuales uno es transmitido durante todo el intervalo de duración de la llamada. Estos tonos están en el intervalo de 67 Hz a 250 Hz. Un decodificador de tono en el receptor lo silencia a menos que el tono correcto esté presente, además el receptor impide la transmisión. 11.
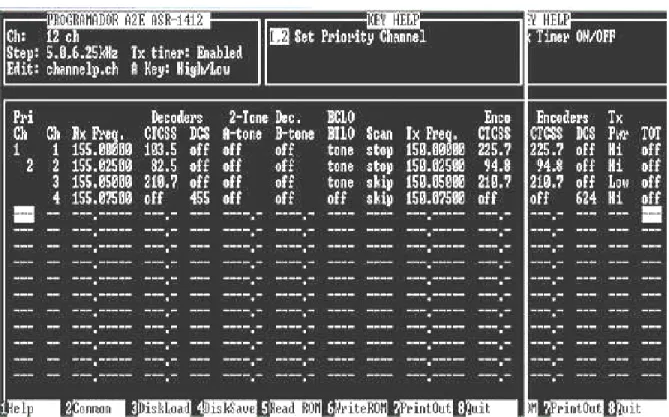
(30) Capítulo 1. sobre el canal de radio cuando detecta la existencia de señal en ese mismo canal con un tono CTCSS diferente, permaneciendo el usuario deshabilitado para escuchar [5]. Una variación del CTCSS es el DCS (Digitally Controlled Squelch), también llamado DQT (Digital Quiet Tone). Aquí una secuencia de 23 bits es transmitida constantemente a una razón de bit subaudible. Debido a que la demodulación de esta señal es difícil sin la información de sincronización, el número de secuencias es restringido a 104 códigos diferentes. El receptor escucha para un código particular y solo desactiva el silenciador en el receptor si el código está presente. En el caso donde no hay suficientes tonos CTCSS o DCS para distinguir entre los diferentes usuarios, lo cual puede ser el caso donde se requiera una dirección individual para un usuario dentro de un grupo, la llamada selectiva, SELCALL (Selective Calling), puede ser usada. En la llamada selectiva, cinco tonos secuenciales son enviados al inicio de cada transmisión. Cada tono consta de uno de 10 códigos, permitiendo la identificación de más de 10 000 usuarios. El receptor solo puede desactivar el silenciador si la secuencia de tonos detectada es la misma que la secuencia con la cual fue programado. La llamada a un grupo es también posible mediante el uso de un carácter especial [5]. También en sistemas de PMR más avanzados es muy usual encontrarse la señalización por DTMF (Dual Tone Multiple Frequency), así como capacidades de señalización de CTCSS y DCS de 5 tonos, 6 tonos, 2 por 5 tonos, 3 por 5 tonos y otras variantes, permitiendo que múltiples usuarios compartan un único canal sin que se mezclen conversaciones. 1.9 Programación. El tipo de señalización a usar, así como las frecuencias de transmisión y recepción, y otros datos de interés para la configuración del equipo de radio son programados mediante un software, el cual es propio para cada equipo. Para realizar la programación se conecta el equipo de radio a la computadora a través de la caja de conexiones la cual actúa como interfase entre ambos. Luego mediante el software apropiado. es editado un fichero que. contiene los datos que van a ser grabados en la memoria del equipo (Anexo 1, figura A1.1), también puede darse el caso de querer modificar los datos ya existentes en memoria, para esto son extraídos de la memoria, se modifican y entonces pueden ser vueltos a grabar en esta. En la figura 1.10 se muestra el esquema de las conexiones a realizar entre los distintos dispositivos para poder hacer la programación. Algunos equipos brindan la facilidad de clonación, la cual consiste en programar igual varios equipos de radio sin ser necesario el uso. 12.
(31) Capítulo 1. de la computadora ni de ningún otro dispositivo ya que solo basta con conectar los dos equipos mediante un cable de interfaz y transferir el programa de uno hacia el otro.. Figura 1.10. Esquema de las conexiones para hacer la programación.. 1.10 Afectaciones en los sistemas radio móvil. En los sistemas radio móviles se producen pérdidas en la señal causadas por la propagación de la misma, lo cual limita la potencia de señal a la entrada del receptor, impactando en la calidad de la señal recibida. Las afectaciones pueden ser del tipo [3]: •. Pérdidas de propagación por trayectoria.. •. Desvanecimiento multitrayecto.. •. Desvanecimiento selectivo de frecuencia.. •. Efecto Doppler.. •. Interferencia cocanal.. •. Interferencia canal adyacente.. •. Ruidos producidos por el hombre.. •. Entorno físico (zona urbana, suburbana, rural).. En las pérdidas de propagación por trayectoria influyen algunos factores como son los siguientes: •. Altura de la antena móvil sobre el terreno.. •. Ausencia de la línea visual.. •. Efecto del terreno y pérdidas por difracción.. •. Variación del contorno y rugosidad del terreno.. Para minimizar en cierta medida las pérdidas por propagación lo más usual es ubicar las. 13.
(32) Capítulo 1. antenas de las estaciones bases en lugares elevados, tratando de incrementar así la línea visual entre móvil y estación base. En ingeniería generalmente se consideran tres efectos para simplificar el análisis de radiopropagación, estos son conocidos como pérdidas de trayectoria, desvanecimiento lento y desvanecimiento rápido [4], [5]. 1.10.1 Pérdidas por trayectoria. Las pérdidas de propagación por trayectoria están dadas por los diferentes obstáculos que se encuentran en el terreno (edificios, colinas, vegetación, etc.), así como por el coeficiente de reflexión y transmisión de la superficie de la tierra en un punto dado, ocurriendo absorciones y reflexiones de la señal [4], [5], por lo que el método de espacio libre no es aplicable en estos entornos, siendo aplicables otros métodos para la estimación de las pérdidas como el método de Wedensky, Okumura-Hata, COST-231, entre otros. 1.10.2 Desvanecimientos lentos. Los desvanecimientos lentos ocurren temporalmente y tienen una duración de unos pocos segundos, son causados por el paso temporal del receptor por detrás de obstáculos que bloquean parcialmente la señal proveniente del transmisor. La profundidad del desvanecimiento depende de las pérdidas de señal por el paso a través de obstáculos y de la potencia de señales recibidas por otros mecanismos como la reflexión [5]. 1.10.3 Desvanecimientos rápidos. Los desvanecimientos rápidos duran unos pocos microsegundos y su causa fundamental es la propagación multitrayecto, ver en la figura 1.11, por lo cual el receptor recibe la señal directa y reflejada, ambas con distinta fase, ocurriendo una resta de la señal y por consiguiente una disminución en la potencia recibida [4], [5].. Figura 1.11. Propagación multitrayecto.. 14.
(33) Capítulo 1. 1.11 Cálculo de la cobertura radioeléctrica. En los sistemas PMR convencionales que trabajan en la banda de 136 a 174 MHz el cálculo de la zona de cobertura puede ser realizada mediante la ecuación de transmisión en términos de campo eléctrico, donde:. (30 PTGT ). ER =. 1 Fa La. d. (1).. Siendo: ER: módulo del vector campo eléctrico en el punto de recepción. PT: potencia del transmisor. GT: ganancia del transmisor. d: distancia del transmisor al punto de recepción. Fa: factor de atenuación tomando en cuenta las características del entorno. La: pérdidas adicionales de la onda espacial estimadas por la aproximación de Wedensky. De la aproximación de Wedensky tenemos que:. La =. (. λd 4 π h 1h 2. ). 2. (2) siempre que se cumpla la condición: h 1h 2 <. dλ 18. Sustituyendo (2) en (1) y despejando d obtenemos:. d =. (. 0 .2293 h 1 h 2 f (MHz )F a ER. ). 1 P TG T 2. (3).. Evaluando esta expresión para el valor mínimo de campo eléctrico (ER) que produce la detección en el receptor, obtenemos entonces el radio de cobertura. A continuación se comprobará la validez de esta expresión realizando los cálculos basados en datos prácticos, tomando como referencia para la comparación de los resultados obtenidos el sistema radiomóvil instalado por la UNE (Unión Nacional Eléctrica) de la ciudad de Santa Clara. La problemática a resolver la podemos plantear de la siguiente forma:. 15.
(34) Capítulo 1. Un sistema radiomóvil opera a una frecuencia de 150 MHz en el entorno de la ciudad. Se utiliza una antena transmisora elevada 100 m sobre el suelo con una ganancia de 5.8 dBi radiando una potencia de 50 W. La altura de las antenas receptoras es de 1.5 m y el valor mínimo de campo eléctrico que produce la detección es de 9 µV/m. Determine el radio de cobertura que puede alcanzarse. Solución: Primeramente calculamos Fa como:. Fa (dB ) = A(dB ) − 30 log f (MHz ). A(dB ) = 45 ± 5dB por lo que tomamos su valor medio ( A(dB ) = 45 ).. Fa (dB ) = 45 − 30 log 150 = 45 − 65.28 = −20.28dB Fa = 10− 2.028 = 9.38 × 10−3 Sustituyendo en la expresión (3) el factor de atenuación y los datos del sistema, se obtiene el valor de d. A continuación se relaciona en la tabla 1.1 el valor calculado por el método de Wedensky y el valor real (aproximado) del sistema. Tabla 1.1. Valor calculado y real de la cobertura. Alcance calculado por la aproximación de Wedensky (Km.) 8.6. Alcance real (aproximado) del sistema (Km.) 12. El valor calculado, pese a que difiere del real, es una buena aproximación ya que se ha estimado a partir de un método teórico que contempla las pérdidas adicionales de la onda espacial y no tiene en cuenta los otros factores que afectan al sistema móvil y que hacen que el canal de RF sea extremadamente variable. Por otra parte, en el cálculo se consideró el factor de atenuación (Fa) para un entorno densamente poblado, pero hay que considerar que esto no se manifiesta de igual forma en toda la zona de cobertura, ya que hay zonas de menor densidad y otras que se consideran del tipo rural donde se encuentra un predominio de las características del relieve y de la vegetación, todo esto trae consigo que en cualquier punto circundante a la antena transmisora que nos situemos, se van a reportar valores distintos de campo eléctrico y por tanto la zona de cobertura va a tener un alcance variable.. 16.
(35) Capítulo 1. 1.12 Descripción radioelectrónica de los equipos utilizados en los sistemas PMR. A continuación se abordaran los aspectos más importantes desde el punto de vista radioelectrónico de los equipos utilizados en los sistemas PMR, haciendo una descripción de sus principales bloques funcionales, así como de algunas de sus características técnicas más importantes, para ello tomaremos a modo de ejemplo un equipo de servicio fijo y uno móvil. 1.12.1 Equipos de servicio fijo. Los equipos de servicio fijo, también conocidos como repetidores, están conformados por diferentes módulos como el receptor, transmisor, sintetizador de frecuencia a PLL (Phase Local Loop) y circuitos de control. A modo de ejemplo analizaremos el repetidor de VHF / FM, TKR-750, el cual puede trabajar en modo símplex o full - dúplex en el rango de frecuencias de 136 a 174 MHz. El módulo receptor lo forman un filtro pasa banda de entrada, el amplificador de RF, un primer mezclador, cadena amplificadora de FI, un segundo mezclador, así como el detector de FM, el amplificador de audio y el circuito silenciador (squelch), este receptor trabaja bajo el principio de heterodinaje con doble conversión de frecuencia, obteniéndose una primera FI a 44.85 MHz y la segunda a 455 KHz [6]. (Anexo 1, figura A1.2). La utilización de dos valores de FI está dada porque se necesita que la primera FI sea una frecuencia relativamente alta para garantizar un buen rechazo de la frecuencia imagen, mientras que la segunda FI debe ser una frecuencia relativamente baja para proporcionar una fácil amplificación selectiva. El valor típico de impedancia de entrada y salida es de 50 ohm y debe garantizarse una buena adaptación de impedancias entre la antena y el transceptor (receptor / transmisor) a fin de evitar pérdidas de potencia por acoplamiento. El circuito del transmisor consta de los siguientes módulos: circuito de micrófono, circuito de ajuste del nivel de modulación, circuito de modulación donde la señal de audio es aplicada a un diodo varicap el cual controla un VCO (Voltage Controlled Oscillator) produciéndose la modulación de frecuencias, amplificador de potencia de salida (a MOSFET), con una potencia de salida de 25 o 50 W la cual es programable, y el circuito de control automático de potencia [6] (Anexo 1, figura A1.3). El sintetizador de frecuencias a PLL esta compuesto por el circuito de recepción a PLL, el circuito de transmisión a PLL y el circuito de activación del detector. Tanto el PLL de recepción como el de transmisión tienen dos osciladores controlados por voltaje, uno para la banda alta y. 17.
(36) Capítulo 1. el. otro para la banda baja, en recepción el rango de frecuencia del oscilador local esta. comprendida entre 180.850 a 218.850 MHz (inyección lateral superior) y en transmisión entre 136 y 174 MHz (Anexo 1, figura A1.4). Contiene además un microcontrolador para las funciones de control de memoria ROM (Read Only Memory), EEPROM (Electrically Erasable Programmable ROM), del circuito de recepción, de transmisión, y realiza la transferencia de datos hacia o desde un dispositivo externo, además de llevar el control del procesamiento digital de señales que se le realiza tanto a la señal recibida como a la que va ha ser transmitida [6] (Anexo 1, figura A1.5). 1.12.2 Equipos móviles. Los equipos móviles en cuanto a su estructura radioelectrónica son muy semejantes a los fijos, sus diferencias más marcadas son en cuanto al uso del PTT, actuando éste como un selector entre las funciones de recepción y transmisión lo que hace trabajar al equipo móvil en modo símplex, y la potencia de transmisión es de 1 o 5 W, también programable. Analizaremos a continuación el móvil FTC-2205, éste solo puede ser programado para la banda B (150.8 a 163 MHz), hay otros modelos para operar en la banda A (134 a 151 MHz) y en la banda C (161 a 174 MHz). Estas bandas A, B, C, no son más que el rango de frecuencias para el cual el fabricante ha construido el equipo. El receptor trabaja bajo el principio de heterodinaje con doble conversión de frecuencias, teniendo una primera FI de 21.4 MHz y una segunda de 455 KHz. Utiliza inyección lateral inferior con frecuencias del oscilador local entre 129.4 y 141.6 MHz (para la banda B). La modulación de frecuencia se realiza a través de un diodo varicap al cual se le inyecta la señal de audio y esta hace variar la frecuencia del oscilador, pasando luego por un doblador de frecuencia, obteniéndose la frecuencia de salida (Anexo 1, figura A1.6). Las frecuencias de transmisión así como las del. oscilador local son generadas por un. sintetizador de frecuencias a PLL con prescaler de doble modulo (P/P+1). Su funcionamiento es el siguiente: una palabra digital de 16 bits es cargada en el divisor principal el cual está dividido en dos partes, como se aprecia en la figura 1.12, una parte principal que es el contador N y otra parte que es el contador A, siendo la palabra digital de N mayor que la de A (N > A). Inicialmente el prescaler comienza con una razón de división de P+1 y ambos contadores comienzan a decrementarse, llegando primero a cero el contador A, momento en el cual se cambia la razón de división del prescaler a P, siguiendo N su conteo hasta llegar a cero,. 18.
(37) Capítulo 1. habiendo contado así N–A. A partir de este momento los contadores se reinician con sus respectivos valores programados y la secuencia se repite. Por lo tanto la frecuencia de salida del sintetizador sería f = fref (P (N – A) + A (P + 1)), lo que se reduce a f = fref (PN + A), siendo el número total de conteo: NT = PN + A y fref la frecuencia de referencia. Los módulos de conteo más usados en los prescalers comerciales son 64/65 y 128/129.. Figura 1.12. Contadores A, N y prescaler.. 1.12.3 Obtención de la palabra digital. Para el móvil FTC-2205 hallaremos la palabra digital necesaria para programar, por ejemplo, un canal para 150.03 MHz en recepción y 158.49 MHz en transmisión [7]. El sintetizador utilizado es el MC145152-2 con contadores N y A de 10 y 6 bits respectivamente y prescaler de módulo 64/65. Para la recepción: NT = (frecuencia de recepción – 21.4) x 200 = (152.03 – 21.4) x 200 = 26126, lo que en binario sería: 0110011000001110 por lo que los contadores se cargan con: 0110011000 (408) el N y con: 001110 (14) el A. Para la transmisión: NT = frecuencia de transmisión x 200 = 158.49 x 200 = 31698, que en binario sería: 0111101111010010 y los contadores se cargarían con: 0111101111 (495) en N y 010010 (18) en A.. 19.
(38) Capítulo 2.
(39) Capítulo 2. CAPITULO 2 SISTEMAS DE CONCENTRACION DE ENLACES 2.1 Introducción a los sistemas de concentración de enlaces. Los sistemas de concentración de enlaces, o Trunking, son sistemas de radio en el que todos los canales son compartidos por los distintos grupos de usuarios, siendo el propio sistema el que asigna automáticamente, mediante un protocolo de control y señalización, uno de los canales libres para que se establezca la comunicación [8], [10]. Por consiguiente, en estos sistemas la asignación de frecuencias a los usuarios no es rígida, sino dinámica, asignándose un canal cuando hay demanda solamente, lo cual minimiza el tiempo de desocupación del canal, puesto que cada usuario sólo utiliza el canal durante el tiempo de conversación, y cuando concluye ésta, el canal se libera, devolviéndose a la reserva para que pueda ser asignado a otro usuario [5]. Otra característica de estos sistemas es que las llamadas que se producen cuando todos los canales están ocupados no se pierden, sino que son puestas en una cola de espera, de donde van saliendo para su curso en el orden de llegada o según prioridades, a medida que se liberen los canales [1], [10], [11]. Su principal ventaja es la de asignar dinámicamente los canales según sea necesario y en tiempo real, con un tiempo de. establecimiento de la comunicación muy corto. Todos los. servicios de Trunking disponen de un radiocanal de control, dedicado al proceso de envío de mensajes de señalización entre el nodo central y los móviles, y se emplea para la asignación de los canales de tráfico además de las tareas de gestión y control de llamadas [8]. El canal de control opera en modo dúplex y los de tráfico en semidúplex [1].. La troncalización en los sistemas de radio brindan muchos beneficios, incluyendo un acceso al sistema más rápido, una mejor eficiencia en el uso de los recursos, mayor privacidad para el usuario y una gran flexibilidad para la expansión. Gracias a esta flexibilidad, un sistema Trunking puede expandirse tanto como el usuario lo requiera [9], [10]. 2.2 Servicios de un sistema troncal. Además de la mejora en el grado de ocupación de los canales, los sistemas Trunking, gracias a su potente señalización digital, pueden ofrecer una amplia gama de servicios a los usuarios, entre los cuales podemos destacar los siguientes [1]:. 20.
(40) Capítulo 2. •. Conexión de las llamadas a la Red Telefónica Pública Conmutada (RTPC), a una central privada (PBX) para su transferencia a extensiones telefónicas de red privada. Pueden así efectuarse llamadas automáticas teléfono convencional / estación móvil.. •. Establecimiento de diferentes modalidades de despacho, como por ejemplo flotas, subflotas, grupos cerrados de usuarios, etc.. •. Realización de llamadas con diferentes niveles de prioridad: ordinario, prioritario, emergencia.. •. Funcionamiento como sistema convencional en caso de fallo del sistema de gestión de los canales.. •. Transmisión de voz y datos.. •. Desviación / transferencia de llamadas.. •. Localización automática del terminal móvil.. 2.3 Tipos de sistemas Trunking. Los sistemas Trunking se dividen en tres tipos atendiendo al mecanismo empleado para hacer la asignación de canales, estos serán descritos a continuación. 2.3.1 Asignación por mensaje. Se asigna un canal al usuario durante toda la comunicación hasta que esta finalice, aunque haya pausas intermedias en las cuales el canal no se utilice [1]. 2.3.2 Asignación por transmisión. El canal se asigna para cada sentido de transmisión símplex, detectado en el sistema de control mediante la señalización del pulsador PTT. De este modo no se desperdicia tiempo de canal en las pausas de la conversación, aunque la señalización y, por consiguiente, el control se hacen más complejos. Otro inconveniente es la posibilidad de que se interrumpa una comunicación en curso cuando, al intentar una nueva asignación, no haya canales libres [1]. 2.3.3 Asignación mixta.. Es una solución intermedia entre las dos anteriores, en la cual se aplica la asignación por transmisión, pero dejando un período de tiempo tras la activación del PTT, asegurando así la. 21.
(41) Capítulo 2. continuidad de asignación del canal a una comunicación en curso y solventando el inconveniente asociado a la técnica anterior de posibilidad de interrupción de alguna comunicación establecida [1]. 2.4 Can al de control. El canal de control utilizado para la señalización asociada al sistema puede ser de dos tipos: •. Canal dedicado: el canal se emplea de forma permanente para la función de control.. •. Canal variable: en este caso, cuando todos los canales de tráfico están ocupados, se utiliza el canal de control como un canal más de tráfico. El primer canal que quede libre será asignado como canal de control, al cual accederán los móviles mediante un mecanismo de exploración secuencial [1].. 2.5 Estructura de un sistema Trunking. Los sistemas Trunking están formados por dos tipos de estructuras básicas denominadas monoemplazamientos y multiemplazamientos. Las primeras se caracterizan por estar formada la red por un nodo central gestor del sistema con su estación base asociada y estaciones fijas y móviles dependientes de la misma. Las segundas son usadas en el caso que se requieran coberturas de gran extensión, estando la red constituida por varios nodos, cada uno de los cuales gestionará y pondrá a disposición de los móviles de su zona un juego de frecuencias. La composición y dotación de frecuencias puede variar de unos nodos a otros, en función del número de vehículos y clase de servicios de cada zona [1]. En la figura 2.1 se muestra la estructura de un sistema Trunking monoemplazamiento. El nodo admite la conexión de los siguientes tipos de terminales: •. Estaciones bases, conectadas mediante líneas telefónicas o radioenlaces punto a punto.. •. Terminales telefónicos directos, conectados por línea.. •. Centrales privadas (PBX).. •. Terminales de despacho, conectados por línea o radio.. •. Terminal de explotación del sistema, con conexión directa si es local o a través de MODEM si es remoto.. •. Conexiones a otros nodos.. 22.
(42) Capítulo 2. Figura 2.1. Sistema Trunking monoemplazamiento.. 2.6 Dimensionamiento. El dimensionamiento es el cálculo del número de canales necesario para dar un servicio a un colectivo de móviles con un grado de servicio especificado o, inversamente, la determinación del número de móviles a los que se puede atender con una cantidad de canales dados [1]. El dimensionamiento se hará para los canales de tráfico, a los cuales se le agregará después el canal de control. Como el sistema funciona en régimen de espera, se aplica la distribución Erlang C. Para los cálculos de dimensionamiento, se toma como objetivo de calidad el llamado grado de servicio GOS (Grade of Service), que es la probabilidad de que una llamada arbitraria tenga una espera superior a W0 segundos [11]. Su valor es: GOS(N, A) = p(W> Wo) = C(N, A) exp [-(N-A)· W/H]. (1).. Donde: N:. Número de canales de tráfico.. A:. Tráfico ofrecido, que es igual a:. A =. M ⋅L⋅H 3600. (Erlang). M:. Número de móviles.. L:. Número de llamadas por móvil en la hora cargada.. (2).. 23.
(43) Capítulo 2. H:. Duración media de la llamada (s).. C(N, A): Distribución Erlang C, dada por:. AN. C ( N .A) = A. N −1. + N ! (1 − A / N ) ∑ ( A. N. (3). k. / k!). k =0. En la práctica suele especificarse el GOS para W0 = H, por lo que: GOS(N, A) = C(N, A).exp[-(N-A)]. (4).. Un parámetro de calidad, derivado del anterior, es el tiempo medio de espera para cualquier llamada, cuyo valor es:. W = C ( N , A). H N−A. (5).. Conociendo el GOS, las expresiones (2) a la (4) sirven para hacer el dimensionamiento del sistema. En la práctica el número de canales se limita a 20 como máximo debido a limitaciones de ingeniería [1]. 2.7 Principales normas analógicas y digitales. Existen diferentes normas analógicas y digitales las cuales se relacionan a continuación: •. Normas analógicas 1. LTR 2. MOTOROLA −. PRIVACY PLUS. −. SMARTNET. −. SMARTZONE. 3. EDACS 4. MPT1327 5. PSEUDOTRUNKING − •. SMARTTRUNK. Normas digitales 1. IDEN (MOTOROLA) 2. MIRS (MOTOROLA). 24.
(44) Capítulo 2. 3. EDACS (EAGIS) 4. TETRA 5. MATRACOM A modo de resumen se mencionarán las características mas importantes de las normas MPT1327 (Ministry of Post and Telecommunication) y TETRA (Trans-European Trunked Radio) por ser estas las de mayor aceptación e implementación en los sistemas Trunking actuales. 2.7.1 MPT1327. La norma analógica más usada en la actualidad es la MPT1327, la cual tiene su surgimiento en el Reino Unido, adoptándose posteriormente por otros países de Europa y del resto del mundo debido a que es una norma no propietaria, o abierta, facilitándose así la competitividad entre los diferentes fabricantes, y logra una mayor aceptación entre los usuarios ya que se eliminan los problemas de incompatibilidad que imponen las normas propietarias. MPT1327 es una norma analógica en la que el acceso al medio se basa en la técnica de multiacceso denominada ALOHA ranurado con longitud de trama dinámica (dynamic frame lenght slotted ALOHA) [1]. El canal de control es digital, siendo la información de señalización modulada usando una modulación digital del tipo FFSK (Fast Frequency Shift Keying) a una razón de bits de 1.2 kbps [1]. El canal de control es dividido en intervalos de tiempo de 106.7 ms, que corresponde a paquetes de 128 bits para la velocidad especificada del canal de señalización [1], [5]. Este paquete de 128 bits es dividido en dos palabras de código de 64 bits cada una como se puede apreciar en la figura 2.2.. Figura 2.2. Estructura del paquete de señalización.. El campo CCSC (Control Channel System Codeword) contiene un código de 15 bits que permite identificar un móvil específico o un grupo de móviles, además lleva la información de sincronismo para asegurar que los móviles conozcan cuando comienza y termina un intervalo. 25.
(45) Capítulo 2. de tiempo. El segundo campo (Address Codeword) contiene los mensajes de señalización [5], los cuales pueden ser de diferentes tipos, como por ejemplo: •. Aloha: control del acceso aleatorio.. •. Requests: son enviados por los móviles para solicitar una llamada.. •. Ahoy: demanda una respuesta del radio para comprobar su localización.. •. Acknowledgments: reconocimiento de mensajes.. •. Single address: usada en casos espaciales donde es necesario enviar el número de serie del radio.. •. Short data: permite la transmisión de ráfagas cortas de datos de hasta 184 bits de longitud entre usuarios.. 2.7.2 TETRA. Es un sistema totalmente digital de última generación, orientado a sistemas de voz y datos móviles. Tiene un aprovechamiento espectral óptimo permitiendo transmitir cuatro canales de voz o datos por cada canal físico de RF. Se basa en un protocolo abierto ampliamente difundido en Europa.. El estándar TETRA se manifiesta en dos formas básicas: el TETRA voice and data system (TETRA V+D), el cual es diseñado para uso de propósito general y provee conexiones de conmutación de circuitos para voz y datos, y el TETRA PDO (TETRA packet data optimized), diseñado para aplicaciones de paquetes de datos. Ambos estándares operan sobre la misma red física TETRA pero su diseño está concebido para diferentes tareas [5], siendo de más interés de análisis el estándar V+D por ser el más vinculado con las comunicaciones móviles privadas.. La red TETRA está formada por las estaciones móviles, las estaciones bases, las centrales de conmutación móvil, los puntos de acceso o enrutadores a otras redes como las redes de datos, red telefónica y otras redes TETRA, además de tener asociada a ella las funciones de operación, mantenimiento y administración. En la figura 2.3 puede verse la arquitectura de la red TETRA.. 26.
(46) Capítulo 2. Figura 2.3. Arquitectura de la red TETRA.. En la operación del sistema, el equipo de radio al ser encendido, busca un canal de control y se registra en la red a través de él. El área de cobertura está dividida en un número de áreas de localizaciones, en las que la estación móvil sólo será avisada de una llamada por parte de la red, en el área de localización en que se encuentra en ese momento. Los móviles se van registrando en la red a medida que se van moviendo hacia una nueva área de localización. Este sistema no implementa procedimiento de traspaso automático de llamada de una celda a otra, en cambio se lleva a cabo un procedimiento de restablecimiento rápido de la llamada cuando el móvil se mueve hacia la otra celda donde es rápidamente restablecida la comunicación. La ruptura en la comunicación. está hecha tan corta como el traspaso de. llamadas (handover) en el sistema GSM. Tiene un alto nivel de seguridad, permite la encriptación de la información e incluye la capacidad de modo directo mediante la cual un terminal puede llamar directamente a otro sin necesidad de pasar por la infraestructura de la red [5]. También soporta servicios de llamadas a grupos, de emergencia, con prioridad, y funcionamiento en modo full-dúplex y half-dúplex.. El acceso al medio a la hora de establecer la llamada es de forma aleatoria usando el protocolo ALOHA ranurado. TETRA opera con tecnología TDMA (Time Division Multiple Access), cada portadora ocupa 25 KHz y soporta una trama TDMA de 4 ranuras de tiempo. La modulación usada es la PSK. diferencial (D-PSK, Differential PSK) permitiendo una codificación de 2. bits/Hz. La razón de transmisión total es de 36 kbps por portadora, o lo que es lo mismo, 9 kbps por usuario, además permite asignar más de una ranura de tiempo a un usuario en particular, lo 27.
(47) Capítulo 2. que incrementaría su razón de transmisión. Descartando la información de corrección de error, el usuario puede enviar hasta 408 bits por intervalo de tiempo, obteniendo una razón de bits máxima de 7.2 kbps [5]. La estructura de la trama se muestra en la figura 2.4. La elección del canal de control depende principalmente del número de portadoras que estén disponibles, por ejemplo, para zonas donde existan varias portadoras, se toma el primer intervalo de tiempo de la portadora principal para formar el canal de control, sin embargo para zonas donde haya en uso una sola portadora, como puede ser una zona de baja densidad de tráfico, el canal de control quedaría conformado por la trama 18 de cada multitrama [5].. Figura 2.4. Estructura de trama del estándar TETRA.. 2.8 Configuraciones de un sistema Trunking bajo el estándar MPT1327. Dentro de una red MPT1327 pueden concebirse varias configuraciones, ellas son las siguientes [12]: •. Sistema local (single site): formado por una sola estación base (site), puede poseer hasta 24 canales. (Anexo 2, figura A2.1). Todas las operaciones llevadas a cabo en la site son controladas en su mayoría por dos unidades básicas: 1. Unidad de control de la site (SCU, Site Control Unit): realiza las funciones de validación de usuarios, registro de radios activados en la site, almacena información. 28.
(48) Capítulo 2. de control estadístico, descarga y controla los parámetros de funcionamiento del canal de control. 2. Módulo de control de canal (CCM, Channel Control Module): realiza todas las funciones de señalización requeridas para implementar un canal de control o un canal de tráfico MPT 1327. •. Sistema regional (multi site): es un nodo regional al cual están enlazadas varias estaciones bases en forma de estrella. Cada nodo puede controlar hasta 16 estaciones bases. (Anexo 2, figura A2.2).. •. Sistema multi nodal: compuesto de varios nodos enlazados en estrella. Permite la interconexión de hasta 32 nodos regionales.. 2.9 Operaciones básicas ejecutadas en una site. 2.9.1 Validación. Proceso. mediante el cual se almacenan en diferentes bases de datos de la red los atributos. de todos los radios inscriptos en el sistema y que serán los elementos. con los que va a. operar la red. Este será el primer proceso técnico que le permitirá a los usuarios poder operar en el sistema. 2.9.2 Búsqueda del canal de control. Es un proceso de búsqueda mediante el cual el radio toma muestras de la intensidad de campo recibida, primero de los canales de control más comúnmente usados y declarados en la tabla de normal hunt. Si falla esta primera búsqueda alterna con. una tabla mayor. donde se. encuentran las frecuencias de todos los canales del sistema, llamada comprenhensive hunt. Al final de este proceso el canal que haya reportado mayor intensidad de campo se tiene como un posible candidato de canal de control para registrarse [12]. 2.9.3 Confirmación del canal de control. Una vez que el radio a definido el canal de control candidato mediante la intensidad de señal recibida, examina la señalización de este en detalle para confirmar si puede activarse sobre este canal.. 29.
Figure




+7





Outline
Descripción radioelectrónica de los equipos utilizados en los sistemas PMR
Principales normas analógicas y digitales
Operaciones básicas ejecutadas en una site
Estructura de los datos del GPS
Fuentes de error en el GPS
Interfase radioeléctrica y estructura de los canales
Descripción radioelectrónica del equipamiento usado en el sistema GSM
Documento similar