Reguladores de frecuencia en grupos electrógenos
58
0
0
Texto completo
(2) Reguladores de frecuencia en Grupos Electrógenos. Facultad de Ingeniería Eléctrica Departamento de Electroenergética. TRABAJO DE DIPLOMA Titulo: Reguladores de frecuencia en Grupos Electrógenos Autor: Yoel Benítez Sotolongo E-mail: [email protected] Tutores: Dr. Leonardo Casas Fernández E-mail: [email protected]. Ing. Odeyvis Valdéz Alba E-mail: [email protected] Dpto. de Electroenergética Facultad de Ingeniería Eléctrica. UCLV Santa Clara 2007 “Año 49 de la Revolución”. 2.
(3) Reguladores de frecuencia en Grupos Electrógenos. Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Eléctrica. autorizando a que el mismo sea utilizado por la. Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad. __________________ Firma del Autor. Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. _____________________ Firma del Tutor. _____________________ Firma del Jefe de Dpto. Donde se defiende el trabajo. __ Firma del Responsable de Información Científico-Técnica. 3.
(4) Reguladores de frecuencia en Grupos Electrógenos. Tarea Técnica: Para lograr el objetivo de este trabajo resulta imprescindible ejecutar las siguientes tareas técnicas: ♦. Realizar una amplia revisión bibliográfica y su posterior análisis, que permita fundamentar teóricamente el funcionamiento de los reguladores de frecuencia y su importancia en los sistemas eléctricos.. ♦. Analizar a través de un ejemplo el comportamiento dinámico del Gobernador atendiendo a sus parámetros.. ♦. Explicar mediante el estudio de los reguladores electrónicos de los Grupos Guascor el funcionamiento de los reguladores modernos.. 4.
(5) Reguladores de frecuencia en Grupos Electrógenos. Resumen: En esta investigación que se titula “Reguladores de frecuencia en los grupos electrógenos“ se realiza una amplia revisión bibliográfica que permitió fundamentar teóricamente la misma y explicar los métodos del control de frecuencia en los sistemas eléctricos, analizar los Gobernadores en su estado estable y dinámico y argumentar la necesidad de la utilización de los generadores acoplados a motores diesel, como una forma de generación distribuida. Con esta alternativa se pretende incrementar la potencia instalada en el sistema electro energético nacional, así como, su utilización en casos de emergencias ya sea por la salida de alguna planta termoeléctrica o en estados de catástrofes naturales. En el desarrollo de este trabajo se exponen claramente las ventajas de la regulación electrónica que se usa en la actualidad con tecnología avanzada lo que permite un fácil manejo y control de estas planta.. INDICE. 5.
(6) Reguladores de frecuencia en Grupos Electrógenos INTRODUCCION: ................................................................................................... 8 Capítulo I.............................................................................................................. 10 “La frecuencia como mecanismo de regulación de la velocidad en los sistemas eléctricos y de generación.” .............................................................. 10 1.1 Introducción............................................................................................... 10 1.2 Regulador de velocidad en la turbina. ..................................................... 10 1.3 Principio de operación de los gobernadores mecánicos de velocidad. .......................................................................................................................... 12 1.4 Funcionamiento en estado estable del Gobernador. ............................. 14 1.5 Acciones de control de los gobernadores en los Sistemas. ................. 17 1.5.1 Control primario. ................................................................................ 18 1.5.2 Control secundario. ............................................................................ 20 1.6 Métodos del control de frecuencia en un sistema eléctrico. ................. 21 Capítulo II............................................................................................................. 23 “Análisis de los Gobernadores de Velocidad atendiendo: Constantes, Diagramas de Bloques y Comportamiento Dinámico.” ................................... 23 2.1 Introducción.............................................................................................. 23 2.2 Definición de un diagrama de bloque. ..................................................... 24 2.2.1 Obtención de la función transferencial lazo cerrado (FTLC). ......... 24 2.2.2 Reducción de un diagrama en bloques. ........................................... 25 2.3 Acción del control automático sobre los sistemas dinámicos. ........... 25 2.4 Servomecanismos y reguladores. .......................................................... 27 2.5 Tipos de Gobernadores en los sistemas eléctricos. .............................. 28 2.6 Gobernadores con caída y retroalimentación......................................... 30 2.7 Modelación y regulación en una planta eléctrica. .................................. 32 2.7.1 Identificación de la planta .................................................................. 33 2.7.2 Diseño y ajuste del algoritmo de control. ......................................... 34 Capítulo 3............................................................................................................. 40 “Regulación de velocidad aplicada en los Grupos Electrógenos Guascor de Generación Distribuida y de Emergencia en Cuba.” ....................................... 40. 6.
(7) Reguladores de frecuencia en Grupos Electrógenos 3.1 Introducción............................................................................................... 40 3.2 Elementos que componen las plantas diesel. ........................................ 40 3.3 Elementos que componen la regulación electrónica ............................. 41 3.4 Descripción del sistema de regulación de velocidad............................ 43 3.4.1 Controlador de velocidad................................................................... 44 3.5 La interconexión entre la bomba y la tarjeta de regulación................... 46 3.6 Opciones de programación en el regulador............................................ 47 3.6.1 El ajuste del Regulador con el Programador manual ...................... 48 3.6.2 Ajuste del regulador con el programa DC_DESK............................ 48 3.7 Control de velocidad ................................................................................ 49 3.7.1 La medición de la velocidad .............................................................. 49 3.7.2 Monitorización de velocidad. ............................................................ 50 3.7.3 Operación con caída de velocidad. ................................................... 51 3.8 Los reguladores modernos. ..................................................................... 53 CONCLUSIONES: ................................................................................................ 54 RECOMENDACIONES ......................................................................................... 55 REFERENCIAS BIBLIOGRAFICAS..................................................................... 56 ANEXOS ............................................................................................................... 57. 7.
(8) Reguladores de frecuencia en Grupos Electrógenos. INTRODUCCION: En el mundo contemporáneo, los avances tecnológicos y el desarrollo alcanzado en las ramas sociales, económicas y culturales han marcado una pauta en el hombre como ser social de estos tiempos por lo que en la actualidad la potencialidad económica de un país se mide, entre otros factores, por la capacidad de generar energía eléctrica, ya que esta es la actividad que le sirve de base a todo su desarrollo económico y social. En nuestro país, que no dispone de grandes fuentes de energía renovable para la utilización en la generación de energía eléctrica y además es un país subdesarrollado, se ha podido apreciar un avance sustancial en la rama de la electricidad. Aunque se han sufrido afectaciones en las. plantas generadoras. debido a los incrementos de la carga y la obsolescencia de las mismas y en las redes eléctricas por la influencia de fenómenos meteorológicos, sin embargo este ha sabido sobreponerse a estos contratiempos. La carga o demanda de un país crece y varía constantemente y para afrontar este reto el país debe tener una vía de solución. Ante la crisis que sufrió el Sistema Electro Energético Nacional (SEN) en el 2004, apoyado entonces en grandes plantas con elevados índices de consumo de combustibles y redes de transmisión y distribución en mal estado técnico, surgieron las ideas del nuevo programa, que básicamente consiste en un sistema basado en el uso de grupos electrógenos disociados por casi todo el archipiélago y el empleo de medidas concretas para el ahorro de portadores energéticos. Se trata de un esquema de generación eléctrica mediante la instalación de baterías de esos grupos electrógenos, que operan con diesel o fuel oil, sincronizados al SEN, lo cual constituye uno de los más profundos cambios conceptuales en la esfera, es decir, equipos con bajo consumo energético, alta disponibilidad, facilidad para su instalación y niveles de potencia utilitaria inferiores a las termoeléctricas. Las nuevas concepciones se apoyan en un elevado número de generadores cada uno de los cuales dispone de un gobernador, por lo que su estudio constituye en. 8.
(9) Reguladores de frecuencia en Grupos Electrógenos la actualidad un tema ineludible de estudio para todos los ingenieros dedicados a la tarea de la Generación Distribuida, para lo cual estudiaremos como objetivo general los reguladores de frecuencia en los sistemas eléctricos. La mayoría de estos reguladores en la actualidad son electrónicos, pero con las mismas funciones de los reguladores anteriormente usados. Por tal motivo el objetivo principal o específico en este trabajo es el estudio de estos dispositivos y lo que han significado en la llamada generación distribuida, revelando así su importancia y objetividad para los sistemas eléctricos. Para una mejor comprensión del trabajo se estructurara de la siguiente forma: Introducción Desarrollo: •. Capítulo 1: La frecuencia como mecanismo de regulación de la velocidad en los Sistemas Eléctricos y de Generación.. •. Capítulo 2: Análisis de los Gobernadores de velocidad atendiendo: Constantes, Diagramas de Bloques y Comportamiento Dinámico.. •. Capítulo 3: Regulación de velocidad aplicada en los Grupos Electrógenos Guascor de Generación Distribuida y de emergencia en Cuba.. Concusiones y recomendaciones Bibliografía. 9.
(10) Reguladores de frecuencia en Grupos Electrógenos. Capítulo I “La frecuencia como mecanismo de regulación de la velocidad en los sistemas eléctricos y de generación.” 1.1 Introducción La regulación de velocidad de las máquinas sincrónicas constituye una de las acciones de mayor prioridad en la operación de los sistemas eléctricos de potencia, ya que su control, por medio de los ajustes sobre los gobernadores de velocidad de los motores primarios de los generadores, es el método que se usa para lograr el balance entre la potencia generada y la demandada. Debido a la estrecha relación que existe entre la variación de la potencia activa y de la frecuencia en los sistemas eléctricos, resulta imprescindible el estudio de los diferentes métodos de regulación de frecuencia que se usan, ya que cuando la carga varía de forma aleatoria durante las diferentes horas del día se producen, igualmente, alteraciones en la frecuencia. La mejor forma de iniciar el estudio de la regulación de frecuencia es por medio del caso más elemental y simple: el regulador de velocidad en una turbina, y posteriormente analizar la regulación en los sistemas eléctricos interconectados. Para el primer objetivo, es imprescindible basarse en el regulador de velocidad más simple, el regulador centrífugo de Watt.. 1.2 Regulador de velocidad en la turbina. La necesidad de equilibrar la potencia entregada a la turbina, por el agua en turbinas hidráulicas y por el vapor en las térmicas, con la demanda eléctrica incluyendo las pérdidas hace indispensable regular permanentemente la admisión de la turbina.. Todo cambio de carga afecta inicialmente a la energía cinética, provocando que la velocidad de las máquinas y con ello la frecuencia en la red disminuya en el. 10.
(11) Reguladores de frecuencia en Grupos Electrógenos caso en que la carga crezca y viceversa, por lo que para un correcto funcionamiento de las máquinas eléctricas, es necesario que funcionen lo más cercano posible a la frecuencia nominal (60Hz). El análisis del regulador de velocidad de la turbina es indispensable para comprender su operación. El regulador se compone de los siguientes dispositivos: •. Sistema de medida que detecta las variaciones de velocidad (tacómetro).. •. Servomecanismo capaz de transformar la señal del sistema de medida en la acción de variar la admisión de la turbina.. •. Órganos de regulación (válvulas).. •. Dispositivo de amortiguación que reduzca las oscilaciones del conjunto.. La disposición esquemática de estos elementos se muestra en la Figura1.1. Figura 1.1: Esquema de un regulador en una turbina de vapor o agua.. Las variaciones de velocidad angular de la turbina se miden, generalmente con un regulador centrífugo de Watt, aunque ya en la actualidad es frecuente encontrar otros censores más precisos, ya que este regulador solamente es. 11.
(12) Reguladores de frecuencia en Grupos Electrógenos exacto con una determinada carga, además de que solo operan en un reducido rango de velocidades, y que necesitan un continuo y costoso mantenimiento. Las variaciones de velocidad se transmiten, mediante un mecanismo de palanca al pistón de una válvula piloto y mediante dicho mecanismo se hace funcionar el servomotor. En este mecanismo existe una zona muerta, es decir, la velocidad debe cambiar en un cierto valor antes de que la válvula comience a funcionar, debido al rozamiento y al punto muerto del retroceso mecánico. El tiempo empleado por la válvula principal para moverse debido a los retrasos en los sistemas de la válvula piloto hidráulica y del servomotor es de 0,2 a 0,3 segundos. Una característica importante de este sistema de regulación es el mecanismo mediante el cual la posición del manguito del regulador y, por lo tanto, las posiciones. de. la. válvula. principal. pueden. variarse. y. ajustarse. independientemente de su actuación debido a la variación de velocidad, lo que se realiza mediante el variador de velocidad o motor acelerador como también se le denomina. [4]. 1.3 Principio de operación de los gobernadores mecánicos de velocidad.. Con el fin de entender las acciones de control en las plantas generadoras, hay que considerar primero la combinación del grupo caldera-turbina-generador de una central termoeléctrica. La mayoría de los turbogeneradores de vapor (y también de los hidráulicos), que se encuentran en servicio, están equipadas con gobernadores de velocidad de la turbina, cuya función es medir continuamente la velocidad turbina-generador y controlar las válvulas reguladores que ajustan el flujo de vapor en la turbina (o la posición de la compuerta en las turbinas hidráulicas), en respuesta a los cambios en la "velocidad del sistema o frecuencia”.. 12.
(13) Reguladores de frecuencia en Grupos Electrógenos 1. Este mecanismo de regulación está basado normalmente en el equilibrio que existe entre la acción de la fuerza centrífuga que actúa sobre las masas o contrapesos del regulador y la acción recuperadora del muelle que las separa, como se indica en la Figura 1.2. El árbol del gobernador de velocidad generalmente se engrana directamente al árbol principal de la máquina motriz. [9]. Φιγυρα1.2: Εσθυεμα δε υν Σιστεμα Γοβερναδορ δε ϖελοχιδαδ εν υνα τυρβινα δε ϖαπορ.. 2. El mecanismo de “control de velocidad " incluye un equipamiento el cual se compone. de. relés,. servomotores,. medidores. de. presión,. dispositivos. amplificadores de potencia, palancas y las uniones o enlaces entre el gobernador de velocidad y las válvulas de control del gobernador. En el idioma de la literatura del servomecanismo éste va a ser el controlador y servomotor.. 13.
(14) Reguladores de frecuencia en Grupos Electrógenos En la Figura 1.2 se muestran la válvula piloto, v, servomotor de aceite O, entre otros elementos. 3. Las válvulas o válvula de control del “gobernador" incluye también las válvulas que controlan la entrada de energía a la turbina, la que normalmente actúa por la acción del gobernador de velocidad por medio del mecanismo de control de velocidad.. 1.4 Funcionamiento en estado estable del Gobernador. El funcionamiento en el estado estable del sistema gobernante simple esbozado en la Figura.1.2 es el siguiente: a) Después de la apertura de la válvula de control (desplazamiento vertical del punto 2) en la Figura 1.2 llamado X2, y de la válvula piloto (que también es el movimiento vertical del punto 1) llamado X1, con la máquina girando en vacío, la válvula piloto está completamente cerrada y la válvula de control está prácticamente cerrada, por lo que X2 = 0 y X1=0. b) Con determinados longitudes de los vástagos de las válvulas y determinadas proporciones de la palanca se determina una posición definitiva para el punto cero y la manga de empuje del gobernador en la punta de la palanca L. Una posición definitiva del punto cero de la velocidad del gobernador G representa una velocidad definida L0 a una frecuencia w0, esta es la velocidad de la turbina en vacío. c) Si se le aplica una carga a la turbina, la velocidad disminuirá y el gobernador de velocidad bajará el punto cero junto con el punto 1, lo que trae consigo la apertura de la válvula piloto V y deja entrar el aceite a presión al pistón del servomotor O, el cual eleva la válvula de control V incrementando así el volumen de vapor y finalmente la velocidad. d) Si el punto 2 de la palanca 1 estuviese fijo en vez de estar acoplado a la válvula de control, como se muestra en la Figura 1.2, la válvula piloto V se cerraría en una sola posición del punto cero, o sea a una sola velocidad; consecuentemente en este caso la velocidad se restauraría exactamente a N0 después de cada cambio en la carga de la turbina, ya que la válvula. 14.
(15) Reguladores de frecuencia en Grupos Electrógenos piloto se mantendría abierta después de un cambio de carga hasta que la válvula de control restaure el punto cero a su posición original y conjuntamente la velocidad a N0. Estas acciones traen como resultado una característica velocidad-carga como se muestra en la Figura 1.3 por la curva 1, tal característica de operación se le denomina isócrona. e) Si el punto 2 se acopla a la válvula de control como muestra la figura 1.2, la válvula piloto que se cierra después de un incremento de la carga de la turbina en esta posición (punto O), y queda por debajo de la velocidad en vacío Como resultado el estado estable se recuperará siguiendo un incremento en la carga de la turbina a una velocidad que será menor que la velocidad en vacío. Por lo tanto, la máquina tendrá una característica descendiente como se muestra en la curva 2 de la Figura 1.3.. Φιγυρα 1.3: Χαραχτεριστιχασ τιπιχασ δε υν γοβερναδορ.. La energía P liberada por la turbina será casi proporcional a la abertura X2 de la válvula de control V, por lo que se puede escribir.. P=. Pr ⋅ X2 dv. (2.1). 15.
(16) Reguladores de frecuencia en Grupos Electrógenos Si. X2 = es la apertura de la válvula de control cuando la máquina entrega su. energía valorada PR, La posición del punto X del gobernador variará casi proporcionalmente al cambio de velocidad o frecuencia, por tanto. X = K | ( N 0 − N ) = K (W0 − W ). (2.2). Pero en el estado estable con la válvula piloto cerrada, X y X2 se relacionan por una proporción definitiva de la palanca (ver Figura 1.2). X 01 = =C X 2 12. (2.3). Consecuentemente:. ΔN = N 0 − N =. Cd v P K | Pr. (2.4). La ecuación 2.4 es la ecuación de la curva 2 en la (Fig. 1.3) La regulación de carga de estado estable se define mediante:. R=. N0 − N Nr. (2.5). Donde N (en la ecuación 2.4 con P = Pr) es la velocidad con carga establecida, N0 es la velocidad en vacío, y Nr es la velocidad establecida. Sustituyendo la ecuación 2.4 en 2.5 se obtiene:. R=. Cd v K|. (2.6). Si las velocidades se expresan en múltiplos de la velocidad establecida s. Dos tipos de ajustes son posibles en las características del gobernador, como ya se mencionó anteriormente: 1) La “caída” R, se puede ajustar por ejemplo de la curva 2 a la 2| por la Figura 1.2, primeramente variando la proporción de la palanca. Este tipo de ajuste se usa solo algunas veces. 2) La velocidad en vacío N0 se puede ajustar cambiando la característica esencialmente por una paralela a ella misma, como es el caso de la curva 2´´ en la Figura 1.3. Este ajuste se realiza durante la operación. 16.
(17) Reguladores de frecuencia en Grupos Electrógenos de la máquina para asegurar la adecuada división de la carga y se puede lograr variando un muelle en espiral S que actúa sobre el gobernador. (ver. Figura. 1.2).. Las. relaciones. proporcionales. expresadas en las ecuaciones 2.2 y 2.1, especialmente en la última, no son estrictamente reales; por lo que las características de las máquinas no son completamente rectas, como se muestra en la curva 2 de la Figura 1.3. Las turbinas hidráulicas que tienen una sola compuerta tienden a tener una característica similar a la curva 4 en la Figura 1.3, mientras que las turbinas de vapor que tienen varias válvulas de control tienen características de la naturaleza general de la curva 3 en la Figura 1.3. Una sección de esta última curva representa la abertura completa gradual de una de las válvulas de control. La curva se puede hacer mas lisa introduciendo más solapamiento en la abertura de las válvulas sucesivas, pero esto tiende a reducir la eficiencia de la maquina. La curvatura de la característica de velocidad hace necesario definir, además de la regulación o curvatura promedio, también el estado estable respecto a la potencia de salida. Esta proporción de cambio es la inclinación del estado estable, de la curva de velocidad de potencia de salida (Figura 1.3) o sea, de la potencia de salida bajo consideración.. 1.5 Acciones de control de los gobernadores en los Sistemas. La característica potencia vs frecuencia de los gobernadores puede aproximarse a una recta descendiente, para lograr un control estable, para que a todo aumento de carga corresponderá una nueva condición de operación a una frecuencia ligeramente menor. Existen distintas acciones para logra que la regulación de frecuencia se lleve a cabo de una forma satisfactoria, ellas son: •. Regulación Primaria: se produce por la acción del regulador y se lleva a cabo cuando la regulación de frecuencia se realiza sin el uso. 17.
(18) Reguladores de frecuencia en Grupos Electrógenos automatizado del control carga-velocidad. Controla, además, la potencia generada por cada máquina. •. Regulación Secundaria o Suplementaria: cuando se hace necesario recuperar la frecuencia inicial, que la regulación primaria no logra restituir, este ajuste se realiza más lento que el caso primario.. •. Regulación Terciaria: cuando los sistemas son muy grandes y cuentan con muchos generadores es necesario controlar automáticamente las máquinas. para. alcanzar. valores. económicamente. convenientes,. considerando las características propias de cada generador. [4] 1.5.1 Control primario. Si en un sistema eléctrico que trabaja en estado estacionario a 60Hz se produce un incremento de carga ( ΔPC ), por encima del valor de la banda muerta del sistema, aquellos generadores que tienen activados sus gobernadores para efectuar control primario asimilan ese incremento de carga menos la disminución de la misma debido a su estatismo de manera instantánea ( ≈ 2 a 12 s) de acuerdo a los % de regulación de cada una, ver figura 1.4, o sea se producen incrementos rápidos de potencias en estas plantas que obedecen a la expresión siguiente: ΔPg ≡ ΔPC + DΔf. (1). D.- coeficiente de amortiguamiento de la carga. ΔPg .- variación de la potencia generada en el sistema.. ΔPC .- variación de la carga medida respecto a la inicial a 60Hz.. 18.
(19) Reguladores de frecuencia en Grupos Electrógenos. Figura1.4: Asimilación de un incremento de carga ( ΔP1. + ΔP2 ) entre dos unidades.. En este caso la frecuencia final del sistema es menor de 60Hz y es necesario que existan acciones de control adicionales para llevar la frecuencia del sistema a 60 Hz.. La función del control primario es asimilar variaciones rápidas en lo fundamental las aleatorias de potencia del sistema con variaciones de frecuencia que no afecten el funcionamiento del sistema. [7] ¿Cómo se limita la caída de frecuencia del sistema ? Si en la expresión (1) se representa la variación de generación en el sistema como la sumatoria de la potencia que toma cada planta entonces: 1. ∑ ( − R Δf ) − DΔf. ≡ ΔPC. Δf ≡ −. 1 ΔPc , B ≡ ∑( ) + D . 1 R ∑( R) + D. B.- Estatismo del sistema. Entonces queda claro que la caída de frecuencia en el control primario puede limitarse con suficientes máquinas ejerciendo el control primario, o sea haciendo la sumatoria mayor.. 19.
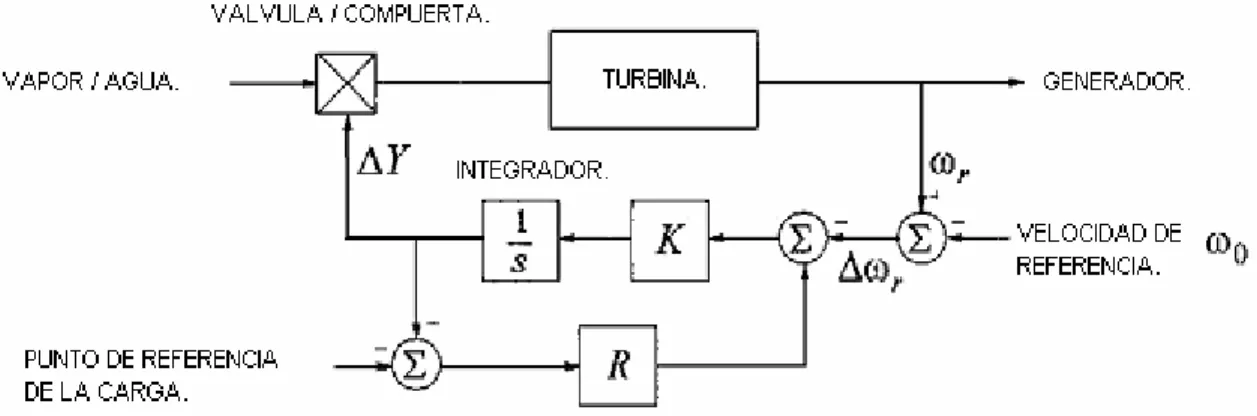
(20) Reguladores de frecuencia en Grupos Electrógenos 1.5.2 Control secundario. Una vez que el sistema haya efectuado el control primario se hace necesario restablecer la frecuencia a 60 Hz para lo cual un conjunto de unidades debe de variar su potencia en un valor sumario equivalente en valor a la variación original de la carga, que como se vio es igual a B Δf . Para ello en estas unidades la característica de regulación de las plantas debe ser movida de su posición inicial B hacia A en caso de que deba incrementar su potencia y hacia C en caso contrario, hasta que la frecuencia se restablezca a su valor original 60Hz, esto se logra actuando sobre el valor del ¨ punto de referencia de la carga ¨ en el circuito de control del gobernador de la turbina, ver figuras 1.5 y 1.6. Este proceso de restablecimiento de la frecuencia demora de 1 a 3 minutos y debe producirse con conocimiento de todo el sistema, quiere decir conociendo el número de máquinas que pueden hacer control secundario, su velocidad de toma de cargas, y el diapasón posible de variación de la potencia de las plantas que hacen el control secundario, cuáles es mas eficiente que varíen su carga, por lo que la forma eficiente de efectuar ese control es centralmente desde el despacho de cargas. [7]. Figura 1.5: Movimiento de la característica de regulación Gobernador.. 20.
(21) Reguladores de frecuencia en Grupos Electrógenos. Figura 1.6: Diagrama en bloques del Gobernador de la turbina.. 1.6 Métodos del control de frecuencia en un sistema eléctrico. Una tarea de gran complejidad en la operación de un sistema eléctrico es alcanzar un efectivo control de frecuencia, pues implica dominar los diapasones de potencia necesarios para dicho control, lo que depende de las características de la carga del sistema, así como conocer los parámetros de los sistemas de control de los generadores y sus características. Las dimensiones actuales de los Sistemas Eléctricos de Potencia (SEP) obligan al uso de sistemas automáticos para el control de la frecuencia, entre otras razones para: a). Incrementar la rapidez del control y por tanto disminuir las desviaciones. de frecuencia. b). Disminuir la carga de trabajo de los operadores y por tanto evitar errores. en la operación del sistema. c) Efectuar el control de forma económica. d) Propiciar menos acciones de control y contribuir a disminuir el desgaste y por tanto el mantenimiento de las unidades. Las desviaciones de la frecuencia más allá de 0.5 Hz. produce afectaciones por vibraciones en las turbinas de vapor que hacen imprescindible el acortamiento de los. períodos. dependen. de. del. valor. de. mantenimiento. Estas afectaciones. la desviación de la frecuencia y del tiempo de. 21.
(22) Reguladores de frecuencia en Grupos Electrógenos duración de la misma. En los últimos años se han estado instalando cargas de magnitudes apreciables que producen bruscas oscilaciones de la frecuencia en el Sistema, lo que ha obligado a buscar soluciones prácticas que las reduzcan, por lo que un control de frecuencia eficiente se ha convertido en una de las tareas más complejas en la operación del Sistema, ya que estas acciones deben realizarse con un mínimo gasto de combustible y mínimo desgaste de las unidades que participan en este control por medio de la reducción del número de pasos de control a efectuar. Al conjunto de estas acciones se les denomina Control Automático de la Generación (AGC). Entre las formas o métodos de controlar la frecuencia se destacan dos: El control de la frecuencia constante en un sistema tiene que realizarse de forma organizada. La regulación primaria de la frecuencia se realiza por los propios gobernadores de velocidad de los motores primarios de los generadores. Para realizar esta función se utilizan los dispositivos del control secundario. El generador que lleva el control de la frecuencia solo suministra la diferencia entre la demanda planificada y la real. La potencia del generador o planta que controla la frecuencia debe ser en el orden del 5 10% de la capacidad total del sistema para lograr una operación efectiva.. Este modo de operación permite operar las unidades generadoras más eficientes a plena carga; en tanto que el generador que controla la frecuencia puede ser una instalación vieja y poco eficiente ya que solo genera una fracción pequeña de la carga total del sistema. Otra de sus ventajas es su sencillez y la facilidad de operación, pero en determinadas instalaciones presenta serias dificultades; tal es el caso de en que en el sistema existan líneas que enlazan dos áreas y cuya capacidad de transmisión puede verse sobrepasada cuando la planta que controla la frecuencia trate de absorber las variaciones de carga que se producen en. 22.
(23) Reguladores de frecuencia en Grupos Electrógenos otra área. Este sistema de control es el que se ha usado de forma tradicional, fundamentalmente en sistemas pequeños.. •. El control de frecuencia constante por las líneas de enlace prioriza la transferencia de potencia por estas líneas y controla que no se sobrepase un límite previamente establecido. [1]. •. El control de frecuencia selectivo combina las ventajas del control de frecuencia constante y del control de potencia constante por las líneas de enlace. Consiste en un dispositivo que se incorpora a los gobernadores de velocidad de las máquinas que llevan el control de la frecuencia y que responde a las variaciones de frecuencia a la vez que es sensible a la potencia transferida a través de la línea. [1]. Capítulo II “Análisis de los Gobernadores de Velocidad atendiendo: Constantes, Diagramas de Bloques y Comportamiento Dinámico.” 2.1 Introducción Los Gobernadores de Velocidad cumplen una importante función en el desarrollo estable de los sistemas eléctricos de potencia. Son los encargados la restauración y control de la velocidad o frecuencia del sistema tras los disturbios producidos ante los cambios en la demanda de potencia. A través de distintos conceptos elementales del control automático, y tomando como base un. 23.
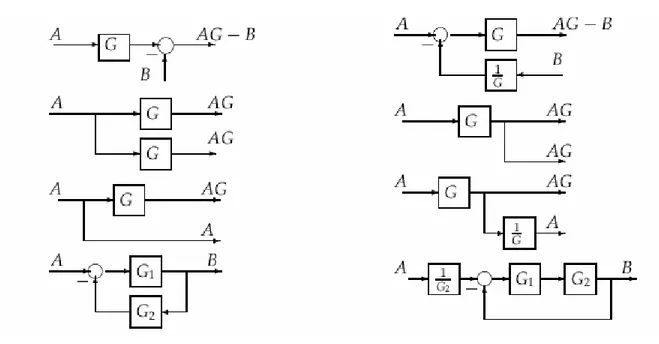
(24) Reguladores de frecuencia en Grupos Electrógenos Gobernador típico, es posible analizar su comportamiento dinámico, para lo cual es necesario realizar un estudio de sus funciones transferenciales, diagramas de bloques, constantes y otros componentes.. 2.2 Definición de un diagrama de bloque Un diagrama de bloques es una representación gráfica de las funciones que lleva a cabo un elemento de un sistema de su flujo de señales. Tal diagrama muestra las relaciones existentes entre los diversos componentes. Un bloque es un símbolo para representar la operación matemática que sobre la señal de entrada realiza el mismo para producir la de salida. Las funciones transferenciales de los componentes por lo general se introducen en los bloques correspondientes, que se conectan mediante flechas para indicar la dirección del flujo de señales.. :. Φιγυρα 2.1 Εσθυεμα σιμπλε δε υν διαγραμα εν βλοθυεσ.. El coeficiente entre la señal de salida C (S ) y la de entrada E (S ) se le denomina función transferencia o función transferencial, y está dada por: G (S ) =. C (S ) E (S ). 2.2.1 Obtención de la función transferencial lazo cerrado (FTLC). Basándose en el lazo de la Figura 2.1 la FTLC queda de la siguiente forma:. Φιγυρα 2.2: Εσθυεμα δε υν λαζο σιμπλε δε υν διαγραμα εν βλοθυεσ.. C (S ) = E (S ) ⋅ G(S ). (1). 24.
(25) Reguladores de frecuencia en Grupos Electrógenos E (S ) = R(S ) − B(S ) = R(S ) − C (S ) ⋅ H (S ). (2). Reemplazando 2 en 1 se obtiene C (S ) G(S ) = R( S ) 1 + G ( S ) H ( S ). (3). 2.2.2 Reducción de un diagrama en bloques Los. diagramas. de. bloques. complejos. se. simplifican. mediante. un. reordenamiento paso a paso basándose en las reglas del álgebra de los diagramas de bloques. Algunas de estas reglas se ilustran en el Anexo 1. •. Se define una “trayectoria a través de un diagrama de bloques” a la secuencia de componentes conectados, pasando la trayectoria desde una variable a otra sin pasar a través de un componente más de una vez”.. •. Se define una “ganancia de trayectoria. “como el producto de las. ganancias que componen la trayectoria. •. Una trayectoria que sale de una variable y regresa a la misma variable se define como “trayectoria de lazo”.. •. A la ganancia de la trayectoria asociada se le llama “ganancia del lazo”.. •. Para el caso particular en que todas las trayectorias directas y las trayectorias de lazo se tocan se define como “la ganancia de un sistema realimentado” y está dado por la suma de las ganancias de las trayectorias directas divididas por 1 menos la suma de las ganancias del lazo.. Ver en la Figura 2 del Anexo 1 un ejemplo de un diagrama en bloques.. 2.3 Acción del control automático sobre los sistemas dinámicos. Los avances en la teoría y la práctica del control automático proporcionan los medios para conseguir un comportamiento óptimo de los sistemas dinámicos, mejorar la productividad, simplificar el trabajo de muchas operaciones manuales repetitivas y rutinarias, así como de otras actividades. El desarrollo óptimo de los sistemas dinámicos se logra mediante. 25.
(26) Reguladores de frecuencia en Grupos Electrógenos algunos métodos y conceptos como son la realimentación de los sistemas, los métodos de compensación entre otros los cuales se aplicaran en este Capítulo. Desde un punto de vista general, cabe decir que los sistemas con realimentación son aquellos en los que la adopción de decisiones en un futuro está completamente. influenciada por los efectos de las previamente adoptadas, o. sea son los sistemas en los que si la acción que se lleva a efecto persigue una determinada meta, es la diferencia entre las cotas alcanzadas en esta meta, y ella misma, la que determina las acciones posteriores. Este tipo de actuaciones son las que se denominan control en bucle cerrado o control por realimentación. En la Figura 2.3 se representa en forma de diagrama de bloques lo anteriormente expresado. En dicha figura se representa por un lado el Sistema, cuya variable de salida se pretende controlar de forma que siga a la de entrada. Para ello se dispone de un elemento de medición, que proporciona el valor de la señal de salida y posteriormente una vez comparada con la señal de entrada toma la decisión correspondiente para actuar sobre el sistema.. Figura 2.3: Realimentación.. Para que un sistema de control realimentado actúe aceptablemente necesita satisfacer determinadas especificaciones de funcionamiento, tanto para su. 26.
(27) Reguladores de frecuencia en Grupos Electrógenos régimen estable como para su operación transitoria que, normalmente, no se consigue con los elementos que constituyen el bucle de control. En ocasiones un simple aumento de la ganancia estática es suficiente para lograr precisión, sin que se afecten demasiado a las características en estado transitorio. No obstante, como lo normal es que estas se vean empeoradas con una actuación de este tipo, o en el mejor de los casos que no se consigan exactamente las que se pretende que tenga el sistema, es necesario tener un dominio del comportamiento del sistema con los elementos básicos que posee. Para ello se han creado los métodos de compensación los cuales se enuncian a continuación: •. Acción proporcional mas derivada (PD);. •. Acción proporcional mas integral (PI). •. Acción proporcional más integral y más derivada (PID).. Estas acciones van a facilitar una respuesta más rápida del sistema de regulación ya que compensan las constantes de tiempo haciéndolas más pequeñas y por lo tanto disminuyen el error del regulador.. 2.4 Servomecanismos y reguladores. Un servomecanismo es un ingenio con el cual se pretende controlar una posición por lo que estos se presentan en campos muy variados. El control de la posición se hace con un esquema de realimentación como el de la siguiente figura:. 27.
(28) Reguladores de frecuencia en Grupos Electrógenos. Figura 2.4: Servomecanismo de posición.. Siempre que la posición de salida no se encuentre en la posición requerida por la referencia aparece un error que actúa sobre el servomotor y hace que éste actúe corrigiendo el error. La única posición de equilibrio es aquélla en que la posición de la salida es igual a la de referencia, por lo que un servomecanismo es esencialmente un sistema seguidor o reproductor en el que la posición de salida sigue o reproduce la señal de entrada (referencia). Una característica esencial de los servomecanismos es que el nivel de potencia la señal de salida puede ser muy superior a la de entrada. La consecuencia de esta amplitud de potencia en la posición de la salida, conlleva a una pérdida de la calidad de la señal, por lo que los diseños de los servomecanismos se provee que esta distorsión sea mínima. Un problema, aunque desde un punto de partida distinto al de los servomecanismos pero que conduce a planteamientos semejantes, es el de los reguladores. Una magnitud física se dice que está regulada si está provista de un sistema que reaccione frente a los cambios del medio externo que afectan a esta magnitud y que trate de mantenerla en un valor aproximadamente constante un ejemplo de ello son los gobernadores de velocidad ya que estos regulan la frecuencia ante disturbios de potencia en la carga.. 2.5 Tipos de Gobernadores en los sistemas eléctricos.. En los sistemas de generación se pueden encontrar varios tipos de Gobernadores: el mecánico-hidráulico que censa la velocidad a partir de una. 28.
(29) Reguladores de frecuencia en Grupos Electrógenos señal producida por un par mecánico y los electro-hidráulicos que lo hacen a través de un transductor de frecuencia que censa la señal a través de una alteración de la misma. A continuación se muestran esquemas simples de algunos de ellos:. •. Gobernador mecánico-hidráulico. •. Gobernador electro-hidráulico. •. Gobernador digital electro-hidráulico. Figura 2.5 a): Gobernador mecánico simplificado.. Figura 2.5 b): Gobernador electro-hidráulico simplificado.. 29.
(30) Reguladores de frecuencia en Grupos Electrógenos. 2.6 Gobernadores con caída y retroalimentación. Los gobernadores que usan retroalimentación de la caída deben ajustarse de manera que la regulación de velocidad coincida con los requerimientos de la potencia del sistema. La. regulación. de. velocidad. se. puede. implementar. directamente. con. gobernadores electro-hidráulicos y electro-hidráulicos digitales utilizando un sensor de Watt que provea la retroalimentación de la velocidad del generador para reemplazar la retroalimentación del mecanismo de control primario de movimiento como se muestra en la figura 2.6 a).. Figura 2.6 a): Regulación de velocidad del Gobernador.. Si ocurre un cambio de velocidad de un 1 %, la salida del generador se debe mover lo suficientemente como para causar la retroalimentación a través del elemento de regulación de velocidad para cancelar este cambio de velocidad. Por lo tanto, para un cambio de velocidad de un 1%, el por ciento de cambio en la salida del generador será recíproco a la velocidad de regulación (o sea, si la regulación de velocidad es del 5 %, el movimiento será (1/0.5 = 20). En general, el por ciento de cambio de la salida del generador para una alteración de frecuencia del sistema se puede calcular como el cambio de velocidad (en por ciento) dividido por la regulación de velocidad por unidad. Un término que contribuye a describir los gobernadores es el de “caída”. Es el cambio de velocidad (o frecuencia) que es necesario para lograr que el. 30.
(31) Reguladores de frecuencia en Grupos Electrógenos mecanismo de control primario de movimiento se mueva desde completamente cerrado hasta completamente abierto. Si se considera un gobernador sintonizado con una caída de velocidad, se abrirá la válvula de control a una cantidad específica para una alternación determinada, lo que se logra usando una retroalimentación del mecanismo de control primario de movimiento (válvula, puerta, servomotor, etc.). Un diagrama simplificado de bloque de un gobernador de caída se muestra en la figura 2.6 b).. Figura 2.6 b): Diagrama de bloque de la caída en el Gobernador.. . Si se sintoniza el gobernador para que sea isócrono (o sea, caída cero), este seguirá abriendo la válvula hasta que la frecuencia se restablezca al valor original. Este tipo de sincronización se usa en sistemas de energía aislados y pequeños, pero trae como resultado un exceso de movimiento del gobernador si se usa. en los sistemas grandes interconectados, por lo tanto, la caída de. velocidad se usa para controlar la magnitud de la respuesta del gobernador para un cambio determinado de frecuencia para que todos los generadores compartan la respuesta después de la alteración. 31.
(32) Reguladores de frecuencia en Grupos Electrógenos. 2.7 Modelación y regulación en una planta eléctrica. Para el estudio del comportamiento de los gobernadores ante la variacion o perturbaciones de la carga del sistema electrico y la necesidad de la implementacion de la regulacion automatica de la frecuencia para garantizar la debida calidad de la energia suministrada a los consumidores se analiza el comportamiento dinámico de un gobernador a través de un ejemplo de un generador de 26 kW y voltage de linea de 220 V . El objetivo del sistema de control es mantener el valor de frecuencia a la salida del generador en un valor cercano al nominal (60Hz) en condiciones de operacion normal, rechazando perturbaciones con un comportamiento del proceso transitorio suave y lo suficientemente rápido, Teniendo en cuenta las caracteristicas del tipo de unidad, de los consumidores y el comportamiento de la carga se considera como principal perturbacion la debida a cambios de la carga de dos tipos, sostenidos de pequeña amplitud, y de gran amplitud y corta duracion. El desempeño deseado del lazo de control se puede precisar por las siguientes especificaciones sobre la respuesta temporal de la frecuencia, para un cambio de carga tipo escalón de amplitud hasta un 10% de la carga nominal e impulsiva de amplitud hasta un 50 % de la carga nominal: - Error a régimen permanente dentro del rango de ± 1 Hz. - Tiempo de restablecimiento máximo de 1 min. - Máximo sobrepaso de error lo menor posible. El tiempo de restablecimiento se considera como el tiempo en que el error entra definitivamente en la zona de ±1 Hz El esquema de control. digital de frecuencia que se utiliza implantando el. regulador en un dispositivo programable se muestra en la figura 2.7. 32.
(33) Reguladores de frecuencia en Grupos Electrógenos. Figura: 2.7 Regulación de frecuencia por carga auxiliar. 2.7.1 Identificación de la planta Para el diseño del lazo de control aplicando métodos analíticos y técnicas de simulación se utiliza un modelo dinámico linealizado de la planta en el entorno a un punto de operación, que relaciona la variación de la frecuencia con un cambio en la potencia de carga, por lo que el sistema responde aun sistema de primer orden cuya función transferencial es: G fw ( s ) =. G fw F ( s) = Pw ( s ) (1 + T2 ⋅ s ). (1). Donde F ( s ) yPw ( s ) son las transformadas de Laplace de las variaciones de frecuencia y carga respectivamente, G fw es la ganancia estática y T2 la constante de tiempo de la planta. Para medir la variación de frecuencia debido a variaciones producidas en la carga, se simularon variaciones de carga mediante la conexión y desconexión de un banco de resistencias trifásicas, estando la planta en un punto de operación estable, por lo que debido a diferentes pruebas en diferentes horarios las variaciones de carga producidas fueron de amplitud entre 2 kW y 5 kW con tiempos de duración entre 1 y 5 segundos. Los datos se midieron con período de. 33.
(34) Reguladores de frecuencia en Grupos Electrógenos muestreo de 0.05 segundos. Los resultados de la identificación se muestran en la tabla siguiente. La imprecisión de los datos es debido a cambios en el punto de operación. Tabla 2.1: Tabla de estimación de los parámetros del modelo. 2.7.2 Diseño y ajuste del algoritmo de control. Para llevar a cabo el estudio fue necesario el diseño de un controlador digital mediante el método de asignación de polos, basándose en un modelo del lazo construido a través de un modelo de la planta,. [4]. para lo cual se usaron los. valores nominales de la Tabla 2.1. Los componentes del lazo son: •. Sensor de frecuencia. •. Unidad de disparo. •. El bloque de tiristores. •. La carga auxiliar. Con la interrelación de estos elementos se logra un diagrama de bloques el cual se encarga de restituir la frecuencia lo mas rápido posible a un valor cercano al nominal. El diagrama de bloques con la interconexion de estos elementos se ilustra a continuacion:. 34.
(35) Reguladores de frecuencia en Grupos Electrógenos. Figura 2.8: Diagrama en bloques del lazo de regulación de frecuencia.. donde: -. C es el controlador. -. R un retenedor de orden cero. -. UD un limitador de la unidad de disparo para trabajar en la zona lineal. -. TC el bloque que incluye la unidad de disparo, los tiristores y la carga auxiliar.. -. G el generador. -. SF el sensor de frecuencia. Todas las variables son en desviaciones donde: r es la referencia, e el error, u señal de control, ud la señal de control limitada que entra a la unidad de disparo, pl es la potencia disipada en la carga auxiliar, pw la perturbación en la potencia de carga, f la frecuencia eléctrica a la salida del generador, vf la tensión de salida del sensor de frecuencia, T0 es el período de muestreo. Teniendo en cuenta el comportamiento dinámico de la planta y del lazo se seleciona un regulador PI cuya funcion transferencial es: q0 + q1 ⋅ z −1 C ( z) = 1 − z −1. (2). luego de austar el contrloador PI y considerando el lazo continuo con tiempo de muestreo. T0. la funcion transferencial queda de la siguiente forma:. ⎛ 1 ⎞ ⎟⎟ Ĉ ( s) = K P ⋅ ⎜⎜1 + ⎝ Ti ⋅ s ⎠. (3). 35.
(36) Reguladores de frecuencia en Grupos Electrógenos. Calculando K P y Ti por el método de asignacion de polos para que la respuesta a lazo cerrado se comporte como un sistema de segundo orden con factor de amortiguamiento ξ = 0.5 y tiempo de establecimiento TS = 5 segundos que produce una frecuencia de oscilaciones de. wd = 1.59. rad / s y un maximo. sobrepaso de M P = 0.16 Hz se obtiene que:. K P = 1.63 y Ti = 0.46. (4). se selecciono periodo de muestreo T0 con el criterio de que la frecuencia de muestreo ws ≥ 20 ⋅ wd tomando T0 = 0.05 s. (5). Finalmente se calcula los parametros del controlador discreto de la ecuacion (2) aplicando las formulas:. ⎛ T q0 = K P ; q1 = − K P ⋅ ⎜⎜1 − 0 ⎝ Ti. ⎞ ⎟⎟ ⎠. (6). obteniendo los valores de ajuste: q 0 = 1.63 ; q1 = −1.46. (7). Para comprobar el comportamiento del lazo se usa la simulación, construyendo un modelo SIMULINK del diagrama de bloques de las Figuras 2.8, observando las respuesta temporales de la salida ante perturbaciones de carga y calculando. 36.
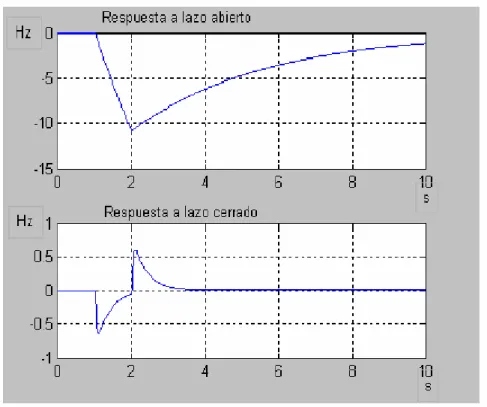
(37) Reguladores de frecuencia en Grupos Electrógenos los índices de comportamiento, error a régimen, máximo sobrepaso (Ere) y el tiempo de restablecimiento (Tre). Las respuestas temporales de la frecuencia a lazo abierto y lazo cerrado ante las perturbaciones se presentan en las Figuras 2.9 a y b). Los índices de desempeño del lazo se muestran en la Tabla 2.2. Tabla 2.2: Índices del desempeño del lazo. Figura 2.9 a): Respuestas ante una perturbación escalón de 2.6 Kw de amplitud. 37.
(38) Reguladores de frecuencia en Grupos Electrógenos. Figura 2.9 b): Respuesta ante una perturbación de pulso de 13 kW y 1 segundo de duración. En la respuesta de la frecuencia ante la perturbación de tipo escalón se puede observar que ante un lazo abierto no se restaura la frecuencia inmediatamente por lo que tiende a disminuir y se halla la respuesta ante un lazo cerrado que hace restaurar la frecuencia en su valor nominal en un tiempo de 2 segundos. Ante la perturbación de pulso de la Figura 2.11b) con un lazo abierto, la frecuencia cae a 50 Hz y luego se restablece a partir de aproximadamente 10 segundos, por lo que no se logra un control eficiente, y se lleva a cabo el control mediante un lazo cerrado el cual hace que la frecuencia oscile ante el disturbio pero luego se restablezca en un tiempo de 4 seg. En general la regulación automática de la frecuencia en el ejemplo estudiado mediante un regulador PI y con el lazo de control cerrado o sea con. 38.
(39) Reguladores de frecuencia en Grupos Electrógenos realimentación influye considerablemente en la calidad de la respuesta de la frecuencia a la salida de la planta ante disturbios en la carga, mejorando así la calidad de energía que se brinda a los consumidores, ya que se observa que se mantuvo la frecuencia dentro del rango de ± 1 Hz alrededor de los 60 Hz en presencia de variaciones súbitas de carga del orden de 1 kW , con una dinámica rápida, tiempo de restablecimiento menor de 30 segundos aunque con algunas oscilaciones.. 39.
(40) Reguladores de frecuencia en Grupos Electrógenos. Capítulo III “Regulación de velocidad aplicada en los Grupos Electrógenos Guascor de Generación Distribuida y de Emergencia en Cuba.” 3.1 Introducción. Los grupos electrógenos brindan una forma de producción de energía eléctrica para las múltiples aplicaciones de servicio que se requieren en la actualidad. La utilización de estas plantas de generación es muy necesaria en estos momentos ya que cubre las demandas de respaldo en sitios alejados de la distribución normal de energía, además que en otros casos disminuyen las pérdidas por distribución, y mejoran el pico de demanda máxima del país. Nuestro país es pionero en el uso de grupos electrógenos sincronizados al sistema electro energético nacional (SEN). Estas tecnologías permiten contar con una generación en pequeños instantes de tiempo, cercano al lugar que se necesita. En este capítulo se estudiaran los reguladores electrónicos que se usan en los grupos electrógenos Guascor sincronizados al SEN y de emergencia, para lo cual se usan conceptos y conocimientos acerca de la regulación de frecuencia o velocidad de los capítulos anteriores.. 3.2 Elementos que componen las plantas diesel. En términos de un sistema eléctrico, una planta diesel se puede representar como un motor primario diesel y un generador. Idealmente, el motor primario es capaz de suministrar cualquier demanda de potencia para mantener la frecuencia constante, y el generador sincrónico conectado a él, debe mantener el voltaje constante bajo cualquier estado de carga. La figura 3.1: es un esquema de una planta diesel. El motor debe ser capaz de suministrar la energía mecánica que demande el generador y con esto se logra una frecuencia constante, manteniendo constante la velocidad del rotor. 40.
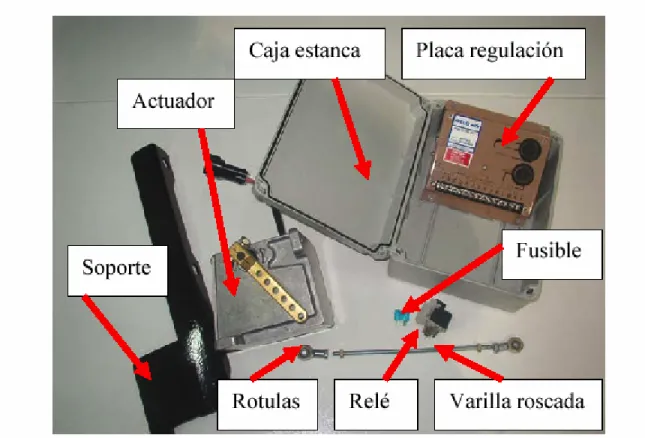
(41) Reguladores de frecuencia en Grupos Electrógenos controlado por el gobernador de velocidad. El generador sincrónico, por su parte puede controlar el voltaje de salida por medio de la corriente de excitación.. Figura 3.1: Esquema de una planta diesel.. El control de la frecuencia se hace mediante un regulador electrónico que actúa mediante un “actuador” sobre la bomba de combustible y controla su entrada al motor de combustión interna ante los cambios en la carga para mantener la velocidad de rotación constante y con esta la frecuencia a la salida del generador.. 3.3 Elementos que componen la regulación electrónica En este tipo de regulación se sustituyen algunos elementos que componen la regulación mecánica. En el motor se sustituye la tapa ciega del volante por la tapa para pick-up ubicadas en la campana. .La otra sustitución importante. es la del muelle que simula una velocidad. constante, que va dentro de la bomba de inyección. por un muelle que simula una velocidad variable.. 41.
(42) Reguladores de frecuencia en Grupos Electrógenos El pick-up es un dispositivo magnético que se instala justo en el engranaje situado en el motor, y éste, a su vez, está acoplado al engranaje del motor de arranque. El pick-up sensa la velocidad del motor y produce una salida de voltaje debido al movimiento del engranaje que se mueve a través del campo magnético de la punta del pick-up, por lo que debe haber una correcta distancia entre la punta de este y el engranaje del motor. La Figura 3.2 muestra los principales elementos del regulador.. Figura 3.2 : Elementos del regulador de frecuencia electrónico DC 2-01. El Pick up actúa contando los dientes del volante del motor, y en función del paso de número de dientes por unidad de tiempo determina la velocidad Ver en el Anexo 1 la Figura 3 una vista final de la regulación electrónica montada.. 42.
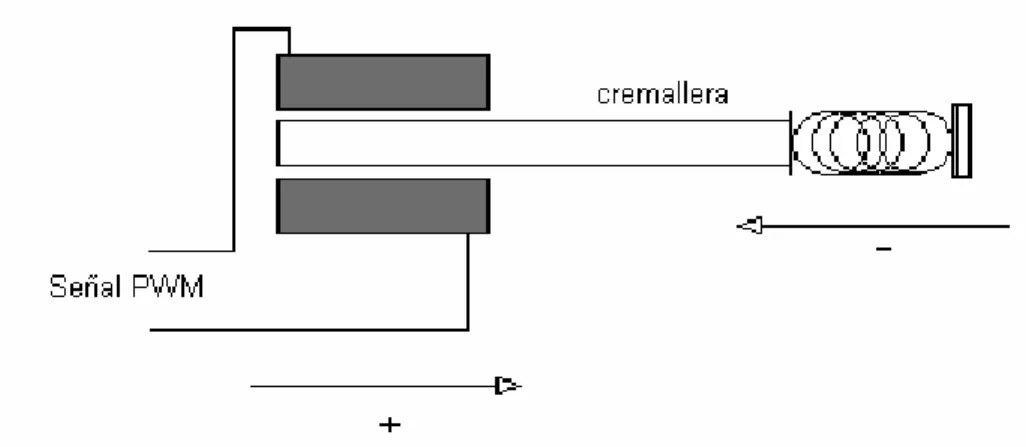
(43) Reguladores de frecuencia en Grupos Electrógenos. 3.4 Descripción del sistema de regulación de velocidad. El sistema de control empleado en los motores Guascor SF consta básicamente de los siguientes componentes: •. bomba de inyección con “actuador” eléctrico Bosch. •. gobernador de velocidad DC 2-01 de Heinzmann. La cremallera de la bomba se mueve en un sentido por medio de la fuerza del electroimán y en el sentido de corte de combustible por medio de un muelle recuperador como se muestra en la Figura 3.3.. Figura 3.3 : Esquema Básico del actuador.. El tipo de actuador acoplado a las bombas de inyección SF, se le denomina de “dos cuadrantes” y se fundamenta en el principio de electromagnetismo. El actuador sirve para controlar la velocidad del motor en condiciones de carga. Cuando la carga es muy elevada la velocidad del motor aumenta para proporcionar la potencia requerida y, cuando la carga es baja, la velocidad disminuye, es decir, el fundamento del actuador es regular de forma automática el régimen de velocidad del motor sin aceleraciones bruscas, generando la potencia del motor de forma continua. Normalmente el actuador se acopla al dispositivo de entrada del combustible del motor. Para llevar a cabo un control absoluto del actuador, es necesario disponer de una señal de realimentación al controlador de la posición real de la cremallera.. 43.
(44) Reguladores de frecuencia en Grupos Electrógenos El fenómeno físico en que se basan estos sensores es la variación de inductancia de una de las bobinas. El movimiento lineal de la cremallera origina una variación de la reluctancia del circuito magnético de la bobina, cuya consecuencia es la variación de la inductancia. Un circuito electrónico mide la tensión de una resistencia que está en serie con la bobina. Por medio de un circuito de “trigger” (disparo), conmutará el relé de alimentación de la bobina cuando el valor de la corriente llegue a cierto valor y cuando baje de cierto valor. El microprocesador irá contando el tiempo que transcurre entre pulso y pulso de la conmutación del relé y de esta forma se conocerá la posición del actuador. 3.4.1 Controlador de velocidad. El controlador de velocidad o regulador (modelo DC 2-01) se encarga de gobernar el movimiento de la cremallera sobre la base de parámetros de programación interna basándose en un microprocesador de alta velocidad. El controlador posee las siguientes entradas desde el exterior del equipo: •. 4 entradas digitales. •. 4 entradas/salidas digitales. •. 6 entradas analógicas (sensores/setpoint/regulación). •. 2 entradas de pick up. El funcionamiento del regulador digital de Heinzmann se basa en dos PID en cascada como se puede observar en el diagrama de bloques funcional de la Figura 3.4 el PID de velocidad actúa sobre la señal de error que surge de la comparación entre la consigna de velocidad y la velocidad actual del motor que se logra mediante el (pick up). El PID del circuito del actuador se ajusta y se optimiza desde el regulador para el tipo de actuador considerado, por lo que la regulación final se lleva a cabo desde el PID de más alto nivel. El valor de la velocidad puede ser proporcionada a la tarjeta EDC de forma analógica o digital.. 44.
(45) Reguladores de frecuencia en Grupos Electrógenos. Figura 3.4: Diagrama de bloques funcional del regulador.. 45.
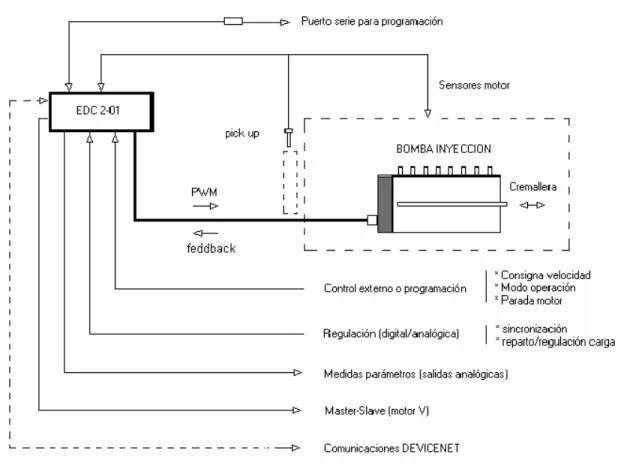
(46) Reguladores de frecuencia en Grupos Electrógenos. 3.5 La interconexión entre la bomba y la tarjeta de regulación. Las interconexiones de la bomba se llevan a cabo mediante los siguientes parámetros: 1. La tarjeta DC 2-01 Heinzmann lleva a cabo el gobierno final de la cremallera por medio de una señal PWM que llega por medio de una conexión física al actuador. 2. En el cable que comunica la tarjeta con la bomba se incluyen también las señales de feedback para la realimentación del controlador. 3. El. controlador. programación. EDC. 2-01. necesarios. dispone para. de. completar. los los. parámetros. de. procesos. de. sincronización y regulación de carga del motor, bien de forma analógica o digital. 4. La tarjeta también permite obtener señales de diferentes parámetros internos (programable) en forma de señales analógicas en (mA o V), para su visualización externa. 5. La programación de la memoria Flash-ROM se realiza por medio de un puerto serie de comunicaciones con el programa DC_DESK instalado en el ordenador, o bien utilizando una programadora manual de Heinzmann (en ambos, existen distintos niveles de acceso). Para efectuar la comunicación es necesario disponer de un convertidor especial, suministrado por Heinzmann. 6. Como opción, los reguladores EDC 2-01 permiten la comunicación por medio de bus de campo DEVICE NET con un controlador general de planta (PLC o similar). Para ello utilizan una tarjeta de comunicaciones que ha de instalarse en una ubicación preparada al efecto sobre el circuito electrónico.. 46.
(47) Reguladores de frecuencia en Grupos Electrógenos La disposición de estos elementos se muestra en la Figura 3.5. Figura 3.5: Diagrama General de la bomba y el actuador.. 3.6 Opciones de programación en el regulador. Para la programación del regulador EDC 2-01 digital, basándose en una lista de parámetros, existen las siguientes acciones: a) Programación en HEINZMANN b) Programación con el programador manual PG02 c) Programación con el PC d) Transferencia de datos.. 47.
(48) Reguladores de frecuencia en Grupos Electrógenos 3.6.1 El ajuste del Regulador con el Programador manual Para ajustar el regulador con el programador manual se conecta al Interface de comunicación del regulador EDC por medio de un cable especial. Permite realizar las operaciones standard del software DC_DESK salvo: •. Monitorización de gráficas en tiempo real. •. Calibración automática de sensores analógicos. •. Almacenamiento de medidas a modo de recorder. Por tanto, presenta desventajas en comparación con el software, principalmente en la etapa de puesta en marcha (optimización PID, chequeo dinámico de parámetros, presentación de datos...). Sin embargo, su utilización es sencilla y no requiere ningún equipo adicional puesto que la alimentación del programador manual se obtiene a través del interface de comunicación con el regulador.. 3.6.2 Ajuste del regulador con el programa DC_DESK •. El programa DC_DESK se emplea para el ajuste y visualización de los parámetros y funciones del regulador DC 2-01 en combinación con un cable especial para conectar al puerto serie del ordenador.(ver figura 3.4). •. El manejo y las funciones generales del programa están estructurados de forma similar a las funciones Windows.. •. La visualización se lleva a cabo optativamente de forma gráfica o alfanumérica.. Presenta las opciones de la programadora manual, pero con una serie de ventajas y características adicionales como son: . Ventanas gráficas. a) Curvas vs t: Pueden seleccionarse hasta 6 diferentes parámetros para visualizar su evolución a lo largo del tiempo. b) Curvas vs x: Pueden representarse valores de parámetros con su dependencia recíproca. c) Curvas limitadoras: Pueden definirse fácilmente y de forma gráfica las diferentes curvas de limitación de actuador.. 48.
(49) Reguladores de frecuencia en Grupos Electrógenos d) Sinopsis: Pantalla del software que muestra valores reales y de referencia de número de rpm, entradas analógicas, estado de conmutadores, fase actual y estado de error del regulador. . Ajuste de sensores. Posibilita una sencilla calibración de sensores analógicos, ajustando los valores mínimo y máximo en la entrada, y los límites superior e inferior de error. . Recorder. Pueden programarse registros de datos para llevar a cabo almacenamientos de parámetros en memoria, con ajustes en el tiempo de arranque, duración y factor de exploración. Los valores pueden memorizarse en el PC con un nombre de fichero discrecional.. 3.7 Control de velocidad La unidad DC 2-01 es regulador de velocidad puro que dispone de digitales y analógicas para efectuar variaciones del setpoint y de esta forma, controlar la velocidad o la carga suministrada por el motor. 3.7.1 La medición de la velocidad Se dispone de dos entradas de pick-up. El control funciona siempre con el pickup 1, excepto cuando se produzca un fallo y el pick-up 2 se activa. Esto mejora la seguridad del sistema para aplicaciones en los que sea un requisito. A continuación se muestra un ejemplo de programación de ambos pick-up:. 49.
(50) Reguladores de frecuencia en Grupos Electrógenos Si se pierde la señal de velocidad durante un cierto periodo de tiempo, se origina un error y esto queda reflejado en los siguientes registros:. Si sólo se dispone de un pick-up se producirá la parada de emergencia. Si se dispone de dos pick-ups, se mide la velocidad por medio del segundo pick-up. El siguiente parámetro da la información de qué pick-up está activo.. 3.7.2 Monitorización de velocidad. Para lograr el fácil manejo de la velocidad se usan los siguientes parámetros en el software DC_DESK que indican la velocidad que el control está midiendo en cada instante: 1) 2000 Speed Velocidad actual del motor. 2) 2001 Speed_Pick_Up1 Velocidad en pickup 1 con filtrado suave. 3) 2002 Speed_Pick_Up2 Velocidad en pickup 2 con filtrado suave. 4) 2003 Speed_Pick_Up1_Value Velocidad medida por el pickup 1 sin filtrado. 5) 2004 Speed_Pick_Up2_Value Velocidad medida por el pickup 2 sin filtrado. 6) 2005 Speed_Filtered Velocidad medida con filtrado fuerte.. 50.
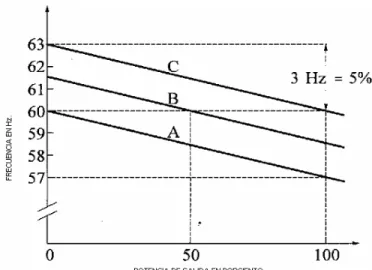
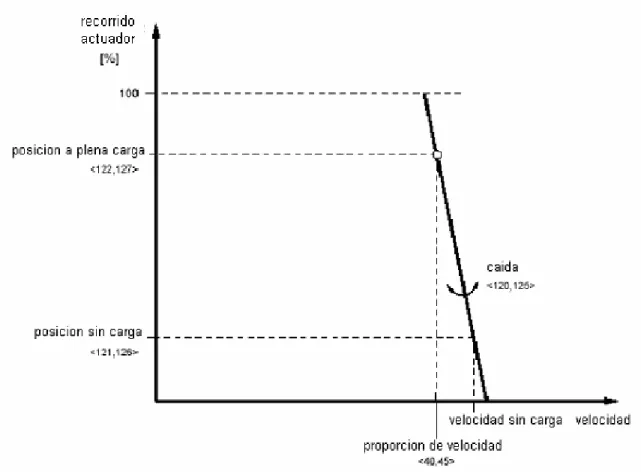
(51) Reguladores de frecuencia en Grupos Electrógenos 3.7.3 Operación con caída de velocidad. Se define como la caida de velocidad permanente cuando el motor está operando en carga. Es deseable que sea 0 (operación isócrona). Sin embargo en algunos casos o aplicaciones es necesaria: •. Operación en Isla en aplicaciones con caída (controles mecánicos). La operación en isla la planta se encarga de llevar tanto la frecuencia como el voltaje en las cargas asociadas a la instalación sin que se reciba respaldo del sistema eléctrico. •. Operación Paralelo con la Red de Grupos Generadores cuando no se emplean reguladores de carga.. En este modo de operación los grupos se conectan a una barra del sistema entregando una potencia fija a un voltaje y frecuencia constante. Esta frecuencia se controla por una planta seleccionada por el despacho, para mantener este parámetro dentro del rango permisible. En el control existen dos estatismos seleccionables: 2812 Switch_Droop = 0 Operando con Droop 1 (120 Droop1) 2812 Switch_Droop = 1 Operando con Droop 2 (125 Droop2). Programación del Estatismo: Se cumple la siguiente relación:. Xp= Estatismo en % nv Velocidad de Régimen a Plena Carga n0 Velocidad sin carga Ejemplo: Velocidad a plena carga 1 500 rpm Velocidad en vacio 1 560 rpm. 51.
(52) Reguladores de frecuencia en Grupos Electrógenos. En la siguiente gráfica se aprecia la característica descendiente de la operación con caída de velocidad en función de la carga así como también el recorrido del actuador en por ciento, el cual será mayor en dependencia de la proporción de la caída de velocidad.. Figura 3.6 : Grafico de la caída de velocidad.. A continuación una tabla con un ejemplo de la programación así como su activación.. 52.
(53) Reguladores de frecuencia en Grupos Electrógenos. Activacion:. 3.8 Los reguladores modernos. Como se ha podido apreciar, la filosofía del control de la frecuencia se mantiene invariable a través de los diferentes avances tecnológicos que cada día invaden todas las áreas tecnológicas. La descripción general de los primeros reguladores (el de Watt) es similar a la de los más modernos y actuales que emplean las tecnologías de punta; o sea no son las posibilidades de registrar eventos, almacenar acciones o mostrar parámetros lo que hacen los reguladores actuales superiores a los primitivos. Sin embargo, es evidente que las posibilidades de la microelectrónica ofrece ventajas que posibilitan resultados más acordes a los tiempos actuales.. 53.
(54) Reguladores de frecuencia en Grupos Electrógenos. CONCLUSIONES: Con la realización de este Trabajo de Diploma se pudo llegar a las siguientes conclusiones:. 1. El principio fundamental de los reguladores de frecuencia se mantiene invariable desde las primeras aplicaciones hasta nuestros días en que las nuevas tecnologías han invadido prácticamente todas las ramas de la industria. 2. Los actuales reguladores, basados en tecnologías de punta, tienen constantes y parámetros más adecuados (constantes de tiempo menores, ganancias mayores, etc.) para desempeñar sus funciones con mejores resultados. 3. La posibilidad de operar las redes provinciales como islas o dentro de ellas en secciones más pequeñas es una realidad presente en la actualidad, y estas acciones no pueden llevarse a cabo sin los conocimientos detallados del comportamiento del conjunto carga frecuencia de las máquinas. 4. Los estudios dinámicos del regulador y las máquinas asociadas deben ser integradas dentro de cursos de superación para los especialistas en las modalidades de postgrado en todas sus variantes.. 54.
Figure
+6
Documento similar