Detection of Non Stationary Photometric Perturbations on Projection Screens
Texto completo
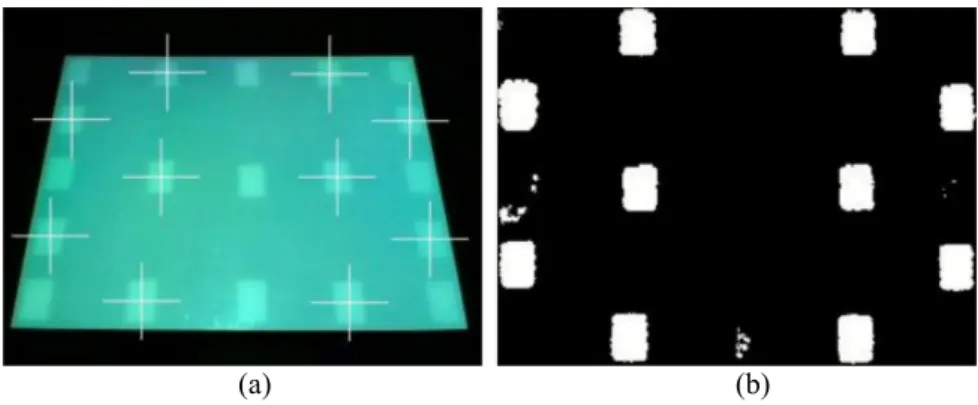
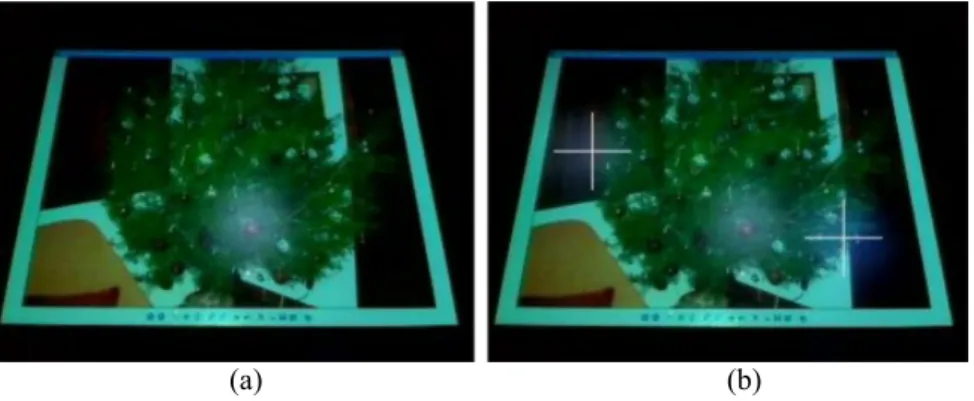
Figure

Documento similar
Abstract: Transepidermal water-loss (TEWL), stratum-corneum hydration (SCH), erythema, elas- ticity, pH and melanin, are parameters of the epidermal barrier function and
3 we show the photometric and astrometric uncertainties obtained along with the Ks-luminosity function (KLF). We detected 1618 stars and the detection limit, that we define as the
Motivated by the previous results of Fabricio Maci` a and Gabriel Rivi` ere on the dynamics of the Schr¨ odinger equation associated with small perturbations of completely
One of the advantages of the proposed ap- proach is that, although the segmentation is based on the 3D shape of the objects, the photometric stereo stage used to estimate the 3D
(2005) is on the comparison of the prediction quality (in detecting exchange rate crises) of six credibility indicators: one based on the drift-adjustment method (DAM), another on
Figure 7: Comparison of the number of frames that compose the summary depending on the selected value for the threshold using the method called “Thresholding: difference
Section 5 contains some computational results, mostly for the accuracy on the harmonic potential in a square domain, and for perturbations of a two-well potential.. Concluding
The results obtained are promising and the projection method was able to obtain the projection on the decision boundary of each point, provide the differences between the two points
