Para la ecuación (1) encontramos las condiciones suficientes que debe satisfacer la no linealidad g′(u), bajo las cuales la ecuación (1) permite soluciones de tipo solit'on. Se construye un esquema en diferencias finitas para resolver numéricamente la ecuación (1).
Ecuaciones integrables y no integrables
La llamada solución solitaria de (1.3) es una familia de un parámetro (ver, por ejemplo, [23]) dada por. Al mismo tiempo, para m > 3 todavía no existen fórmulas claras para describir la interacción del solitón.

Ecuaci´ on GKdV con no linealidad no homog´ eneano homog´enea
Notemos que si g′(u) = u entonces la ecuación (1.7) no permite soluciones tipo solitón, y con g′(u) = u5 se obtiene el caso crítico L2, es decir, los Solitones son inestables porque no cumplen las condiciones de estabilidad establecidas anteriormente en la ecuación (1.5). Para la ecuación (1.7) vamos a demostrar la existencia de soluciones de tipo solitón para luego estudiar la estabilidad con respecto al lado derecho, mostrando como ejemplo las simulaciones numéricas para la ecuación S-KdV como caso específico.
M´ etodos Asint´ oticos para soluciones de tipo solit´ onsolit´on
2 y ai > 0, i = 1,2 constantes, entonces tenemos la ecuación de Schamel-Korteweg-de Vries (S-KdV), que aparece en el estudio de las ondas sonoras del plasma, donde intervienen los electrones y el potencial electrostático. La solución asintótica mod O(εN) de la ecuación diferencial con un parámetro pequeño ε es la función yN = O(1), por lo que cuando la sustituimos en el lado izquierdo de la ecuación (1.8), obtenemos la función Y(x, t , ε) = O(εN ) en el lado derecho de la ecuación mencionada.
El caso homog´ eneo
Si f es una función diferenciable de orden n y es par, entonces todas sus derivadas de orden impar desaparecen en el origen. De las igualdades (2.12) vemos que solo hay dos relaciones para 3 parámetros, por lo tanto la solución (2.11) define una familia de solitones.
El caso no homog´ eneo
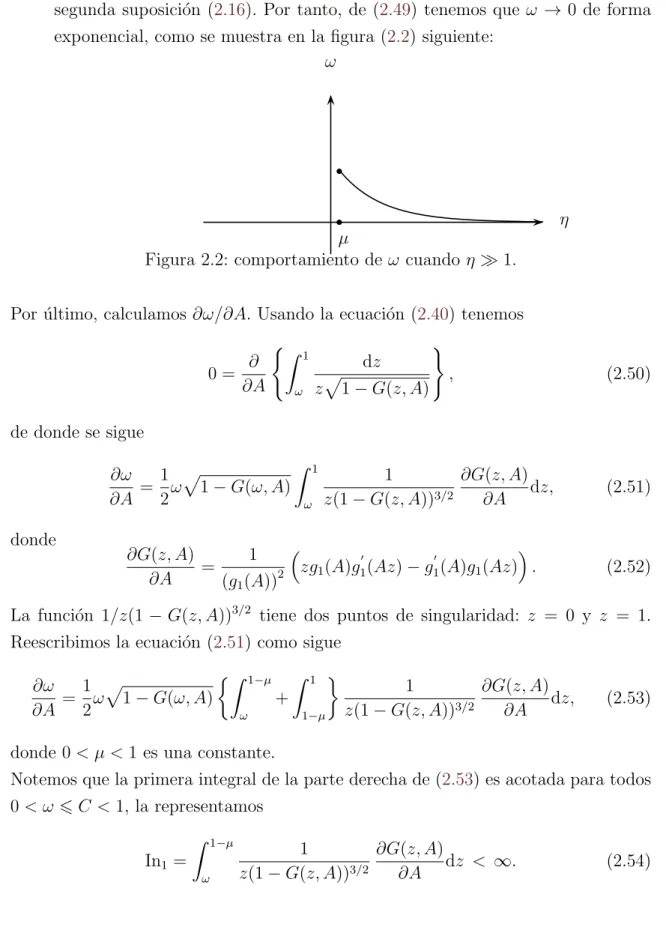
Es sorprendente ver que para la ecuación KdV, uno de los casos integrables, la solución para η∈[0, δ] no es única. Tenga en cuenta que la primera integral del lado derecho de (2.53) está acotada para todo 0 < ω6C <1, esto lo representamos.

Descripci´ on num´ erica
Por lo tanto, utilizaremos el método RK4 para calcular la solución numérica del problema (2.71), con la condición inicial ω(δ, A) = ω0, es decir, resolveremos los números - aclararemos el siguiente problema:
Leyes de Conservaci´ on
Si los solitones satisfacen (2.74) y (2.75), esto significa que tanto la masa como la energía en un solitón son constantes. Ahora demostraremos que las soluciones de (2.13) satisfacen leyes de conservación como la masa, la energía y algunas otras. 2.77) Ahora integrando por partes obtenemos Para el caso especial no homogéneo de la ecuación (2.13), cong′(u) =u3/2+u2, se satisfacen las siguientes leyes de conservación.
Perturbaci´ on de la ecuaci´ on
Utilizando el método descrito en [19,20] es posible construir una solución asintótica de tipo solitón para la ecuación (3.1), sig'(u) es una función suave bastante homogénea. Nuestro resultado obtenido en este capítulo es la construcción de una solución asintótica tipo solitón para la ecuación (3.1), donde la no linealidad g′(u) ∈ C1 es una función no necesariamente homogénea. Se describe la notación a utilizar y recordamos algunas definiciones de los espacios funcionales que usaremos al construir la solución asintótica de tipo solitón de (3.1).
Análisis de fórmulas que describen la cola y amplitud de la solución asintótica de solitón (3.1).
Construcci´ on de la soluci´ on asint´ otica
Definiciones y notaciones
Hay funciones f−(x, t) suficientemente suaves como para que. x×[0, T])⊂ H el subespacio lineal de funciones g(τ, t), tales que, junto con sus derivadas, la siguiente condición se satisface uniformemente en todo conjunto compacto K ⊂R1. En este trabajo consideraremos en detalle el caso en el que la no linealidad de (3.8) es una función g′(u) ∈ C1. Probamos que en este caso es posible construir una solución asintótica de tipo solitón para la ecuación (3.8) donde el desplazamiento de onda regular es de fondo.
Esquema formal y construcci´ on del t´ ermino principal
De las relaciones (3.28) tenemos 2 ecuaciones para 3 incógnitas, por lo que necesitamos una ecuación más para el parámetro de la variable independiente, que obtenemos más adelante.
Construcci´ on de la primera correcci´ on
Ahora, igualando a cero el término multiplicado por ε en la ecuación (3.29), tenemos. 3.32) Al hacer τ → ∞ encontramos la constante de integración. El segundo elemento del núcleo formal de ˆL es una función par, que se encuentra usando la fórmula [7] de la siguiente manera. Por lo tanto, obtenemos la solución a la ecuación homogénea en H de la siguiente manera UH =C ∂U0/∂τ, para C =C(t) arbitrario.
La condición (3.40) se llama ortogonalidad y está bien definida considerando que Φ1 contiene la función libre dϕ1/dt, para su demostración (ver, por ejemplo [19, 22]). Sustituyendo la función F1 en (3.42) demostramos que el comportamiento de la amplitud A y la velocidad φ0t no depende de la función libre ϕ1t. Por tanto, la función U1 fuera del frente de onda x=ϕ(t) se comporta como una onda de choque suave, como se muestra en la figura (3.1).

Existencia de la segunda correcci´ on
An´ alisis de la amplitud del solit´ on
An´ alisis de la cola del solit´ on
Si el supuesto de que 1(u) es una función de valor real implica que debe ser una función no negativa, entonces surge la condición adicional.

Resultado principal
[19] describe cómo encontrar la corrección ϕ1(t) en el caso de no linealidades más suaves. Esto implica que la solución asintótica de tipo solitón conserva su forma excepto por pequeñas oscilaciones a la derecha del frente de onda. Ahora estudiaremos la solución asintótica de un ejemplo, el caso especial cuando g′(u) =u3/2, f(u) =u(µ−νu).
La ecuación (3.83) es de Bernoulli, por lo que tenemos una solución explícita para la condición inicial A|t=0 = A0. En este capítulo, construiremos un esquema estable en diferencias finitas para simular la dinámica de solitones de la ecuación (2.13).

Diferencias finitas
Es suficiente tomar la condición inicial u0 como una combinación de solitones con posiciones iniciales dentro del intervalo (0, intervalo [0, ; necesitamos elegir aproximaciones apropiadas para los términos diferenciales lineales y elegir una forma de linealizar el término no lineal.
Esquema no lineal preliminar
Considerando la forma simplificada (4.10) para la aproximación del término no lineal, demostraremos que se verifica.
Linealizaci´ on
Para las funciones g′(y)∈ C2 podemos seguir los mismos pasos para encontrar la ecuación linealizada de la forma (4.29). La prueba de solubilidad de (4.29) para τ y h, que no tienden a cero, puede demostrarse teóricamente, véase [23].
Algoritmo de la soluci´ on
Existen diferentes métodos para resolver el sistema (4.34); En este algoritmo utilizaremos el método de reducción de Gauss-Jordan. En realidad, nos llevaría mucho tiempo utilizar el método de Gauss-Jordan de forma general, ya que la dimensión de la matriz es O(N2), donde N ≡ 1/h ≫ 1. Por esta razón, Utilizaremos una versión de este método ajustada para este tipo de matrices.
La modificación realizada al método es tal que para pasar del paso tj al tj+1 se hace con un número de operaciones del orden O(N) en lugar de O(N2) como se hace generalmente. Los algoritmos que utilizan operaciones O(N) para pasar de un paso t = tj a otro t = tj+1 se denominan algoritmos económicos. La forma del coeficiente en la diagonal principal σi asegura la solubilidad del sistema (4.34) para τ /h3 suficientemente pequeño analíticamente.
Simulaci´ on para la ecuaci´ on GKdV-´ g homo- g´ enea
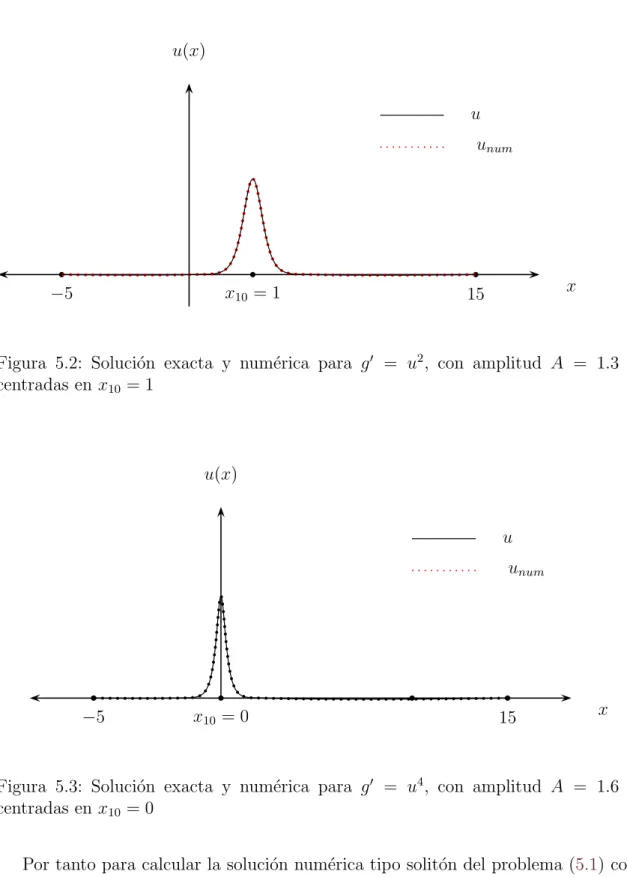
La solución numérica se obtiene para las variables, por lo que para pasar de la variable a las x variables, necesitamos encontrar la relación de los tamaños de paso entre dichas variables. Ahora vamos a calcular la solución numérica de la ecuación GKdV-´g para no linealidades de la forma g′ = uq+1, utilizando el esquema numérico descrito en (4.32). Para estudiar la interacción de dos solitones de la ecuación homogénea (5.2), es decir, con el lado derecho igual a cero, utilizaremos el algoritmo numérico descrito en (4.29).
Consideremos ahora el comportamiento de la solución con como condición inicial una combinación de funciones que satisfacen la ecuación (5.1), es decir, la suma de dos solitones. La Figura 5.7 muestra la gráfica de la solución numérica en la que se utilizó como condición inicial la combinación de dos solitones, el primer solitón está centrado en x10= −1 con amplitud A1 = 1.5 y el segundo solitón con amplitud A2 = 0.5 está centrado en x20 = 1. De la interacción la solución volverá a ser la superposición de solitones con las mismas amplitudes y velocidades de movimiento.

Ecuaci´ on GKdV-´ g bajo una perturbaci´ on
C´ alculo de la soluci´ on asint´ otica
Para elegir el valor de r no tenemos ningún criterio general; Para nuestros cálculos elegiremos la forma.
Comportamiento de la cola
Soluci´ on num´ erica directa
Además, vemos que la amplitud de la radiación es más suave, es decir, la onda distorsionada tiene un tiempo de persistencia mayor. Por otro lado, si tomamos la amplitud inicial del solitón mayor que el punto crítico A∗, vemos que la onda distorsionada es casi estable a medida que la amplitud de radiación ε u−1 aumenta muy lentamente, como se muestra en la Figura 5.13. . Ajustando μ y variando los valores de ν la amplitud de onda tiene el mismo comportamiento descrito para diferentes valores de A∗.
Además, se han encontrado las ecuaciones que describen la evolución de la onda perturbada durante un tiempo t ∈[0, T], T >0. Se crea un algoritmo de diferencias finitas para obtener la solución numérica de la ecuación (2.13). Se realizan varios experimentos numéricos; En particular, se muestran los resultados de la dinámica de solitones para la ecuación de tipo KdV con no linealidad g′(u) = u2+u3/2.