Validación del sistema: a) posicionamiento de cabina, b) salida de cabina, c) preparación para descenso, d) descenso de cabina... Validación de funciones: a) recepción de carga, b) elevación de carga, c) posicionamiento de carga, d) estabilización de carga. Este documento describe el diseño y construcción de un prototipo a escala del sistema de elevación para transformadores de baja tensión.
DESCRIPCIÓN BREVE DEL PROBLEMA
Cada transformador está sujeto por dos partes de casco ligero que se apoyan sobre los hombros de los trabajadores, provocando molestias a medio y largo plazo. Sumado a esto, la resolución 2400 de 1979 sobre disposiciones sobre vivienda, higiene y seguridad en los lugares de trabajo, en sus artículos 390, 391 y 392, determina las condiciones en las que un trabajador puede transportar un determinado peso.
JUSTIFICACIÓN DEL PROBLEMA
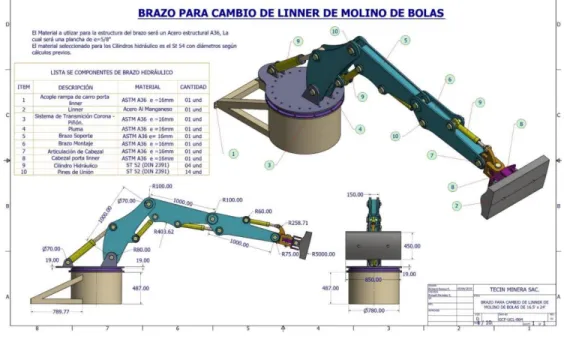
Este trabajo proporciona información importante para identificar los riesgos existentes en las operaciones de elevación de carga, así como crear un plan de elevación detallado para realizar este proceso de forma segura y sin saltarse nada [8]. El siguiente proyecto se realiza en Perú y tiene como objetivo diseñar un brazo hidráulico para manipular revestimientos dentro de molinos de bolas y con ello reducir tiempos y costos de mantenimiento de molinos de bolas de 16.5 x 24' [9], así como también reducir los riesgos operacionales de la actividad.

ANTECEDENTES
El último antecedente presentado es el diseño y estudio cinemático de un robot tipo KEOPS con tres grados de libertad [11]. Además, este vehículo se manejaría mediante un mando a distancia, cuyo diseño se reutilizó en el proyecto actual.

OBJETIVO GENERAL
OBJETIVOS ESPECÍFICOS
ESPECIFICACIONES DEL SISTEMA
Grúa telescópica: Para levantar la carga utiliza poleas y cabrestantes. En cuanto al manejo de la carga, cuenta con dos juntas rotacionales y una traslacional para mayor alcance, aunque se debe tener cuidado de no generar momentos que puedan volcar el vehículo. . Para bajar, se abre una válvula que permite que el fluido hidráulico regrese al depósito por el peso de la propia plataforma, sin que tenga que intervenir el motor.

DISEÑO DEL MODELO CON CARGA TOTAL (300 KG)
El caudal obtenido corresponde al 13,9243% del caudal total, este porcentaje corresponde al ajuste de la válvula reguladora. El caudal obtenido corresponde al 9,7372% del caudal total, este porcentaje corresponde al ajuste de la válvula reguladora.
MODELO CON CARGA ESCALADA (1:10)
Como la bomba es la misma, el flujo entregado en ambas posiciones de la válvula es el mismo. Para lograr este flujo a la salida de la válvula de control, el grado de apertura se limita a aproximadamente 25,527%. Para lograr este flujo a la salida de la válvula de control, el grado de apertura se limita a aproximadamente 31,8569%.
La presión en el manómetro M1 es la presión de alivio menos las caídas de presión a través de la válvula direccional y la válvula de control de flujo. En caso de otra posición de la válvula direccional (extensión del vástago), la regulación se realiza en la salida. La presión en el manómetro M2 sería la presión de alivio menos las caídas de presión a través de la válvula direccional y la válvula de retención.
Después de dimensionar todos los elementos del sistema, se debe determinar la presión de ajuste de la válvula de seguridad.

DESARROLLO DEL MANDO A DISTANCIA
El carril de desplazamiento propuesto en el modelo real está diseñado en perfiles tubulares y de acero estructural, pero por problemas de disponibilidad de materiales, tiempo, costo y complejidad en la construcción (recomendación del experto en procesos de fabricación), este carril fue sustituido por uno de acero con carros donde se atornilla la estructura móvil. En esta configuración un dispositivo actúa como maestro y el otro como esclavo, esta forma de comunicación es la más fácil de implementar y también es la más utilizada en aplicaciones donde se envían datos, como leer un sensor o controlar puertos GPIO. Este método de comunicación mantiene la misma naturaleza que el mencionado anteriormente, con la diferencia de que la información enviada por el maestro ahora llega a más de un esclavo.
Este modelo es muy útil cuando es necesario controlar más de un microcontrolador al mismo tiempo. Este tipo de configuración gestiona una única tarjeta ESP como esclava, permitiéndole recibir información de múltiples tarjetas Master. En su posición superior permite el funcionamiento de los cilindros con normalidad, en la posición inferior permite el movimiento de los cilindros sin tener en cuenta el estado de los sensores.
A continuación se puede ver la distribución gráfica de elementos y el esquema de control electrónico.

SIMULACIÓN DE FUNCIONAMIENTO
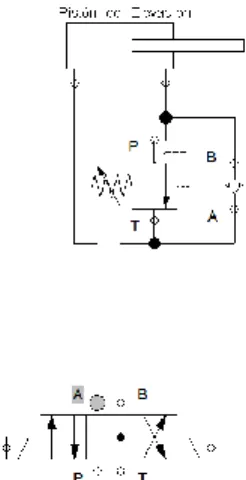
Las Figuras 48 y 49 muestran el funcionamiento de la válvula de contrapeso y la válvula de retención operada por piloto. Para el diseño de la estructura se tuvo en cuenta los requisitos mínimos exigidos al prototipo, estos son: .. transportar cargas hasta 30 Kg y que las dimensiones del mecanismo permitan su transporte sobre plataforma o ser arrastrado. Considerando el peso a levantar (aproximadamente 60 kg entre actuadores, carga útil y estructura móvil), este cambio no generará problemas en el desempeño de la estructura.
Una vez definido el diseño final de la estructura, se realizó un análisis de elementos finitos para verificar la integridad estructural de las diferentes partes del mecanismo. En el caso de la estructura fija: el análisis estático con una carga de 60 kg, correspondiente a la carga, los actuadores y la estructura móvil. Este análisis arroja resultados positivos con respecto a su tensión axial y flexión, como se muestra en la Figura 56b. Se puede observar que los puntos que experimentan mayor tensión son las conexiones de diferentes elementos, pero este valor máximo (1.118 x 107) se mantiene por debajo del límite elástico de la estructura (1.8 x 108), lo que garantiza que no se producirán deformaciones de rendimiento.
De igual forma el factor de seguridad da un valor de 16, este factor es alto, sin embargo, tomando en cuenta la disponibilidad de referencias de tubería y la carga que se planea levantar, la mayoría de referencias dan un factor de seguridad similar. .

CONSTRUCCIÓN DEL PROTOTIPO
Proceso constructivo del prototipo: a) montaje de rieles, b) construcción de la estructura, instalación de cilindros, c) montaje de cilindros.

VALIDACIÓN DE COMPONENTES
VALIDACIÓN DE SUBSISTEMAS
El funcionamiento del mando se simplifica en el siguiente diagrama de flujo (para ver el código ir al anexo 7): Una vez montados los cilindros en la estructura, comienza la fase de validación, la primera de las cuales se refiere al funcionamiento de los cilindros en combinación con la construcción es. Para ello se realiza un montaje sencillo con válvulas accionadas mecánicamente para verificar el movimiento de los cilindros. vástagos y confirmar que no existen colisiones u obstáculos entre la estructura y los vástagos. Una vez confirmado el funcionamiento del control y comunicaciones, se realiza el montaje hidráulico de las válvulas de accionamiento eléctrico para su accionamiento mediante botoneras. Se realizaron pruebas de extensión y compresión de los cilindros, verificando conexiones y correcto funcionamiento. funcionamiento de las válvulas. las válvulas.
Para confirmar la caja de mando y control se realizó un sencillo montaje sobre una de las mesas del laboratorio de automatización. Se utilizaron indicadores LED para simular el movimiento de los rodillos y se realizaron movimientos con joysticks para verificar el funcionamiento de la programación realizada en conjunto con los sensores. Cuando se verifica el funcionamiento de las válvulas controladas eléctricamente, se reemplazan los tableros de pulsadores por la unidad de control y electrónica diseñada, se realizan las mismas pruebas y se obtienen resultados positivos al realizar expansión y compresión a distancias entre 1 y 3 metros.
Autenticación del sistema mediante el comando. a) vista general del montaje, b) vista detallada de conexiones eléctricas e hidráulicas, c) comprobante de autenticación.

VALIDACIÓN DEL SISTEMA
Los resultados obtenidos son consistentes con el diseño, el control cumple su función sin problemas ni pérdida de comunicación, los cilindros se mueven sin problemas sobre los rieles, no existen golpes ni obstáculos al mover el carro móvil y la estructura es rígida y estable. Sin embargo, en cuanto a fabricación, los respaldos no son del mismo tamaño que el resto, por lo que se generan pequeños bamboleos en determinadas ocasiones.
VALIDACIÓN DE FUNCIONES
Los resultados obtenidos concuerdan con lo diseñado, el control cumple su función sin problemas ni pérdida de comunicación, los cilindros se mueven suavemente sobre los rieles, no se crean golpes ni obstáculos durante el movimiento del carro móvil y la estructura es rígida y estable. sin embargo, en términos de producción, los soportes traseros no tienen el mismo tamaño que el resto, por lo que en ciertos casos se crean pequeñas oscilaciones Evaluación de funciones: a) toma de carga, b) elevación de carga, c) posicionamiento de carga, d ) estabilización de carga . El levantamiento de carga se realizó satisfactoriamente, se realizaron pruebas de 5 por 5 a 30 kg y el sistema respondió positivamente en cada una de ellas, se agregó un trinquete para garantizar seguridad y estabilidad en la carga. Se modificó la longitud de la horquilla y se colocaron los soportes para dotar de mayor rigidez y corregir este percance.
Además, la velocidad inversa del posicionamiento de la carga se puede regular en ambos sentidos con una válvula reguladora de caudal unidireccional posicionándola en el punto de entrada de presión y no como se diseñó inicialmente (En la entrada del cilindro). Control de peligros durante actividades con deslastre de carga en los procesos productivos de la Empresa Industrias Marlo. Diseño y construcción de la parte mecánica del brazo hidráulico portátil para pequeñas excavaciones, propulsado por un motor a gasolina.
Elaboración de manual de operación de levantamiento para Colombia Crane & Service. Riesgos Laborales – Portal de Riesgos Laborales para Trabajadores de la Educación [sitio web]. Construcción de prototipos para carga escalada Evaluación de funciones del prototipo.