Por lo tanto, el uso de su contenido, así como de cualquiera de las partes que lo componen y están protegidas por la ley federal de derechos de autor, obliga a quien utilice esta obra a tener en cuenta que lo hará sólo si es con fines educativos, académicos, de investigación. o informativos y acepta dar crédito a esta fuente, así como a su autor o autores. Con el desarrollo de la tecnología y su integración en el hogar, la idea de la domótica aparece para aumentar la calidad de vida de las personas.
P LANTEAMIENTO DEL PROBLEMA
H IPÓTESIS
O BJETIVOS
J USTIFICACIÓN
M ETODOLOGÍA
A LCANCES Y LIMITACIONES
En la topología en estrella, cada dispositivo de la red solo puede comunicarse con el coordinador de la red de área personal (PAN), consulte la Figura 3.2. En otras palabras, garantizar que nadie más en la red utilice el identificador PAN. Sin embargo, un RFD puede ser parte de la red y comunicarse sólo con un dispositivo particular (un coordinador o un enrutador) en la red.
La Figura 3.4 también muestra un ejemplo de cómo la retransmisión de mensajes puede ayudar a aumentar la distancia de la red o incluso sortear obstáculos. Las capas del protocolo de red inalámbrica ZigBee se muestran en la Figura 3.5. Una baliza es un mensaje especialmente diseñado que se utiliza para sincronizar los relojes de los nodos de la red.
En este capítulo se define el diseño de la red según las necesidades del proyecto. Para hacer esto, un dispositivo envía una transmisión de reconocimiento de dirección de red a través de la red.
![Figura 2.1 Expansión de rango de red para satisfacer las necesidades actuales [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/12458237.0/17.918.284.654.252.619/figura-expansión-rango-red-para-satisfacer-necesidades-actuales.webp)
REDES INALÁMBRICAS
T IPOS DE REDES INALAMBRICAS
- Redes inalámbricas de corto alcance
B LUETOOTH
- Arquitectura
- Bandas de frecuencia y canales RF
- Capa física y canales físicos
- Capa de banda base
- Características físicas
- Control del alcance
- Protocolo de Adaptación y Control de Enlace Lógico
- Protocolo RFCOMM
- Aplicaciones
- Rendimientos y versiones
Los procedimientos de paginación se utilizan para establecer nuevas conexiones entre un maestro y un esclavo. En el estado Conectado, la estación Bluetooth se convierte en miembro de la piconet.

- Arquitectura
- Modo infraestructura
- Modo ad hoc
- Modo de malla
- Tipos y bandas de frecuencia
- Diferentes capas físicas
- Descripción de estructuras de subcapas
- Servicio básicos
Las estaciones inalámbricas incluyen una tarjeta de acceso a la red IEEE 802.11 o un adaptador inalámbrico (o controlador de interfaz de red). Cada celda (llamada conjunto de servicios básicos, BSS) en el estándar IEEE 802.11 está controlada por una estación base (llamada AP). La referencia de arquitectura IEEE 802.11 puede admitir diferentes tipos de interfaces de radio.
La red debe estar en una de las dos topologías de red especificadas por IEEE 802.15.4: estrella y punto a punto. Como se muestra en la Figura 3.5, las dos capas inferiores están definidas por el estándar IEEE 802.15.4. Por lo tanto, una red inalámbrica IEEE 802.15.4 es prácticamente ilimitada en cuanto a la cantidad de dispositivos que pueden ingresar a la red.

ZIGBEE
- A RQUITECTURA
- Topología estrella
- Topología de malla
- Topología de árbol
- R ELACIÓN ENTRE Z IG B EE Y EL ESTÁNDAR IEEE 802.15.4
- F RECUENCIA DEOPERACION Y TASA DE DATOS
- C OMUNICACIÓN BÁSICA IEEE 802.15.4 Y Z IG B EE
- CSMA-CA
- Redes con Beacon habilitado vs sin Beacon
- Método de transferencia de datos
- Direccionamiento
- R OLES Y TIPOS DE DISPOSITIVOS
- H ARDWARE
- DIGI
La disposición de los elementos para esta prueba será la que se muestra en la Figura 4.6, donde los postes delimitadores inteligentes marcarán el camino. Para lograr esto, todos los dispositivos que reciban una transmisión retransmitirán el paquete 3 veces, consulte la Figura 5.10. La Figura 5.14 muestra las pérdidas de potencia de la señal que ocurren desde una antena transmisora a una antena receptora, con y sin línea de visión, a medida que aumenta la distancia.
En la Figura 5.15 podemos ver que hay mayores pérdidas de propagación cuando hay obstáculos y la distancia aumenta.
DISEÑO DE LOS NODOS SENSORES
Prueba de frenado
Sensores de barrera de infrarrojos para marcar y registrar el momento en que el coche pasa el punto de frenada. Pantalla informativa para indicar el inicio y final de la prueba, así como la velocidad del coche. En la pista de pruebas, el conductor arrancará el coche mediante un indicador en pantalla, una luz verde, tiempo durante el cual se mostrará en pantalla la velocidad del coche en el momento de pasar por la zona de frenada, que será detectada. por una barrera de infrarrojos, la pantalla mostrará inmediatamente el semáforo en rojo.
El conductor deberá frenar suavemente hasta detenerse sin cruzar el límite de la zona de frenada donde habrá otro sensor de barrera de infrarrojos que detectará si el coche ha cruzado esta línea.
Prueba de estacionamiento en paralelo
Pantalla informativa para indicar el inicio de la prueba y si alguna de las barreras de contención fue impactada. Con barreras de impacto inteligentes se delimitará la longitud de la plaza de aparcamiento; Habrá uno en el frente y otro en la parte trasera del "cajón". Si se detecta que el coche ha tocado o golpeado una barrera, se enviará una señal de aviso que se podrá mostrar en la pantalla de información.
La barrera de distancia inteligente se coloca al costado del estacionamiento para medir la distancia que recorre un automóvil y proporcionar una señal si es golpeado, consulte la Figura 4.3.

Prueba de estacionamiento en batería
Para automatizar esta prueba se dispondrán dos barreras de distancia inteligentes que delimitarán la longitud de la plaza que conforma el aparcamiento. Cuando el conductor esté listo para iniciar la prueba, el facilitador de la prueba indicará el inicio de la prueba a través de la pantalla con la luz verde parpadeando. Si ocurre que el coche ha tocado o golpeado alguna de las barreras, envían un aviso en pantalla con una luz roja intermitente, indicando que la prueba ha fallado.
Para completar la prueba, una vez el coche esté aparcado, el facilitador se lo mostrará al sistema y la barrera inteligente medirá la posición del coche.

Prueba de zigzag
Una vez que el conductor esté listo para realizar su recorrido, el facilitador indicará el inicio de la prueba en la pantalla de información del folio del conductor y con una luz verde, verificando que el auto anterior sometido a la prueba también lo haya hecho. En caso de que se acierte un mensaje, se reporta al sistema el número de folio y el mensaje. Al finalizar la prueba, la pantalla indicará si el conductor ha superado la prueba o no haciendo parpadear una luz verde o roja por cada pala participante.

S ENSORES Y DISPOSITIVOS
- Acelerómetro de tres ejes MMA 7341L
- Barrera de contención inteligente de golpes y poste delimitador inteligente
- Ultrasónico SFR02
- Barrera de contención inteligente de distancia
- Infrarrojo
- Sensor de barrera infrarrojos
- Temperatura TMP102
- Sensor radar
- Interruptor
- Pantalla informativa
Para la barrera de retención el sensor es . Estará montado sobre una barricada de polietileno de media densidad de aproximadamente 130 centímetros de alto y 40 centímetros de ancho, tiene alta resistencia a impactos y choques, ver Figura 4.9a. En el caso del puesto fronterizo inteligente, el dispositivo se montará sobre un poste de PVC de aproximadamente 1 metro de altura y 40 centímetros de diámetro. También tiene una alta resistencia al impacto, consulte la Figura 4.9b. El sensor se montará sobre una barrera vial de polietileno de aproximadamente 110 centímetros de alto, 40 centímetros de ancho y 2 metros de largo. Tiene gran resistencia a choques fuertes, ver Figura 4.11.
Esta pantalla tiene dos visualizadores numéricos de siete segmentos y dos indicadores de semáforo, ver Figura 4.14.

D ISEÑO DEL NODO SENSOR
- Arquitectura del nodo sensor
- Diseño de PCB para nodos sensores
- Batería Fuente de energía
- Microprocesador y puertos
- Almacenamiento
- Módulo XBee
La Figura 4.22 muestra una conexión básica entre un dispositivo maestro y esclavo en un bus SPI. El enrutamiento en malla permite que los paquetes de datos atraviesen múltiples nodos (saltos) en una red para enrutar datos desde un origen a un destino; consulte la Figura 5.11. Cuando un nodo de origen necesita descubrir una ruta o un nodo de destino, transmite un comando de solicitud de ruta, consulte la Figura 5.12.
Dado que las condiciones de los nodos no son en un ambiente interior, sino en un ambiente exterior, se ha creado una gráfica que muestra el caso en el que se supone que existe línea de visión entre nodos, para lo cual solo se vieron los tres primeros Ver Figura 5.14 para los términos de la ecuación (2) y el caso donde no habrá línea de visión entre nodos, NLOS, ecuación (2) en su totalidad.

C ODIFICACIÓN DE NODOS SENSORES
DISEÑO DE LA RED Y ANÁLISIS DE DESEMPEÑO
Algoritmo para la prueba de frenado
Esta prueba requiere dos barreras infrarrojas, denominadas R1-BIR1 y R2-BIR2. En cada barrera hay fototransistores que en todo momento reciben la señal modulada del diodo emisor, un sensor de radar R3-RD1, que se encargará de medir la velocidad del coche y un display R4-DPY1, que mostrará la luz roja, la Luz verde y muestra la velocidad. El inicio de la prueba es enviado por la unidad central, es decir, por el coordinador, a R4-DPY1 con la instrucción de encender la luz verde, que indica que el coche debe empezar a avanzar y acelerar, paralelo al sensor del radar. R3.-RD1 transmite la información sobre la velocidad a la que se mueve el coche y se muestra en la pantalla R4-DPY1. Cuando el coche pasa la primera barrera R1-BIR1, el fototransistor pierde comunicación con el diodo emisor de luz infrarroja, el nodo envía esta información al coordinador, el coordinador lo interpreta como si un coche hubiera cruzado la línea de frenado y envía la señal a enciende la luz roja en la pantalla R4-DPY1, lo que hace que el conductor reduzca la velocidad hasta que el automóvil se detenga por completo.
La barrera R2-BIR2 detectará e informará constantemente si el coche supera el límite. Si esto sucede, se enciende la luz roja. Independientemente de si se registra o no, se envía un informe a la casa matriz.

Algoritmo para la prueba de estacionamiento en paralelo
Algoritmo para la prueba de estacionamiento en batería
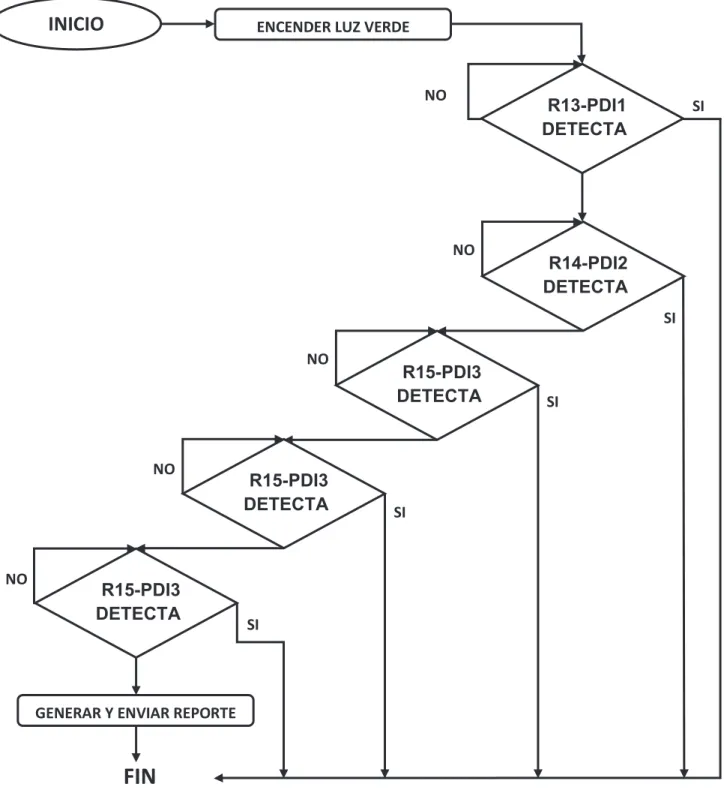
Algoritmo para la prueba de zigzag
Para obtener una visión más amplia de lo que significa tener toda la red de sensores funcionando, a continuación se muestra un mapa aéreo que muestra todos los nodos necesarios, numerados y codificados, para realizar las pruebas especializadas simultáneamente; consulte la Figura 5.9.
D ISEÑO DE LA RED
- Comunicación de Red ZigBee
- Direccionamiento de red de 16 bits
- Direccionamiento de64 bits
- Transmisión de datos
- Transmisión de broadcast
- Transmisión multicast
- Transmisión de unicast
- Descubrimiento de dirección de red
- Algoritmo de ruteo AODV
� es el número de paredes y el número de pisos que se ubican entre el transmisor y el receptor. Para el caso donde hay 2 nodos a una distancia de 10m, observamos una pérdida de potencia de -52dBm y -74dBm, las hojas de especificaciones de los módulos XBee indican una sensibilidad del receptor de -96dBm, por lo tanto con las pérdidas. Las condiciones en las que se encontraron las antenas eran muy similares a las condiciones en las que estarán los sensores, un estacionamiento de vehículos.
Para el caso en el que no hay línea de visión, se encontró un automóvil cada vez que se tomó muestra; Para el entorno en el que se encontrarán los nodos, este será el mayor obstáculo.

A NÁLISIS DE DESEMPEÑO DE LA RED Y NODO SENSOR
- Modelo empírico WLAN
- RSSI
- Contador de datos transmitidos
- Resultados en cuanto a distancia
CONCLUSIONES