La levitación magnética es un fenómeno físico donde la fuerza generada por un campo magnético sobre un objeto hecho de material ferromagnético se utiliza para mantenerlo en suspensión estática sin contacto mecánico. Único, contrarresta el efecto de la gravedad. Los carros flotan sobre la pista gracias a una fuerza de atracción magnética generada por electroimanes ubicados en su parte inferior, como se muestra en la Figura 1.1.

Contexto del proyecto
Descripci´ on del dispositivo
El estimador de posición es el encargado de proporcionar una tensión proporcional al entrehierro real a partir de la corriente que circula por el electroimán. En su entrada recibe la comparación de la referencia de posición con la estimada y en base a ella modifica la corriente que ingresa al electroimán y por.

Alcance del proyecto
El controlador de corriente cumple la función de ajustar los niveles de voltaje de salida del compensador a niveles de corriente adecuados para que el electroimán genere suficiente potencia para soportar el objeto que está siendo levitado.
Organizaci´ on del informe
En este capítulo se realiza un modelado físico del sistema para encontrar una expresión de la fuerza magnética ejercida en función de la variable de control. Luego se realiza el modelo de estado de la planta y se obtienen otros parámetros relevantes para el diseño del sistema de control.
Modelado matem´ atico del electroim´ an
Modelado de inductancia del electroim´ an
Ambas partes del electroimán, junto con el entrehierro que las separa, forman un circuito magnético. La fuerza del campo magnético depende del medio en el que se propaga la corriente magnética.

C´ alculo de la fuerza magn´ etica
Por lo tanto, al analizar la expresión 2.14, se puede ver que la fuerza depende de la corriente, de la distancia de separación y de los términos constantes. Sin embargo, es importante señalar que la magnitud de la fuerza es proporcional al cuadrado de la variable de control e inversamente proporcional al cuadrado de la variable a controlar, por lo que el comportamiento del sistema es no lineal.
Caracter´ısticas del electroim´ an
Caracter´ısticas constructivas
El apilamiento de las hojas es tal que la rama central de la "E" tiene una sección cuadrada (A) de 25cm2, que es la máxima. El devanado consiste en 150 vueltas de alambre de cobre esmaltado de 2,5 mm de diámetro enrolladas alrededor de una bobina de plástico (figura 2.3) que luego se ubica en la rama central de la parte "E".
![Figura 2.2: Dimensiones del electroim´ an [mm].](https://thumb-us.123doks.com/thumbv2/123dok_es/5765856.5468053/39.892.234.751.173.699/figura-dimensiones-del-electroim-an-mm.webp)
Corriente nominal del sistema
Se utiliza una pila de láminas cuyo exterior está cubierto por una pintura de esmalte para aislarlas entre sí y reducir las pérdidas de energía causadas por las corrientes eléctricas generadas en el núcleo n debido al flujo magnético. Si bien esta corriente es suficiente para mantener el objeto en un estado de equilibrio, se requiere una corriente mayor para poder responder a las perturbaciones en la distancia de separación.
Expresi´ on de inductancia linealizada
Mediciones sobre el electroim´ an
Medici´ on de resistencia del bobinado
Medici´ on de inductancia
Es decir, sin tener en cuenta las líneas de flujo magnético que cierran en el interior de la pieza en forma de "E" y no atraviesan la pieza "I". La expresión 2.20, obtenida de las medidas, se acerca más al comportamiento real de la inductancia.

Modelo de estado de la planta
De la expresión 2.22 se puede obtener un modelo de estado de segundo orden en el que una variable de estado (x1) es la distancia Yg, otra variable (x2) es su derivada (velocidad) y la entrada al sistema (u) es la corriente de Se continúa por tanto con su linealización alrededor de los puntos de equilibrio de la expresión 2.26.
Descripci´ on general
Comportamiento el´ ectrico del electroim´ an
En la expresión 3.2 se puede observar que la respuesta al escalón se compone de dos partes: un término con exponencial negativa correspondiente a . En la parte superior podemos ver el voltaje de entrada y en la parte inferior la corriente del electroimán.
Dise˜ no del controlador
- An´ alisis de estimaci´ on de distancia de entrehierro
- L´ ogica de control de corriente
- Consideraciones pr´ acticas del controlador de co- rrienterriente
- Elecci´ on de topolog´ıa de fuente de alimentaci´ on
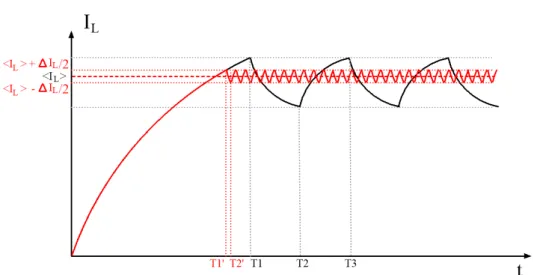
Por lo tanto, se sugiere estimar el valor de la distancia a partir de la medición de dicha pendiente. El regulador cambia la polaridad de la tensión de alimentación del electroimán para que la corriente siga oscilando en torno a un valor medio de referencia.
Elecci´ on y c´ alculo de par´ ametros del con- troladortrolador
C´ alculo de ancho de hist´ eresis
La clasificación de voltaje de la fuente de alimentación utilizada para el puente H se basa en la versión anterior del dispositivo, por lo que se utiliza VCC = 24 V. Entonces, con este ancho de histéresis seleccionado, se obtiene una frecuencia de conmutación de la instalación (calculada para la corriente más desfavorable Imin = 30A):
C´ alculo de ganancia de entrada
El controlador de corriente tendrá una corriente promedio variable entre 0A y 30A, por lo que la expresión 3.13 debe cumplirse para cualquier valor de corriente dentro de ese rango. Aunque aún no se ha seleccionado el sensor de corriente a utilizar, se puede considerar su ganancia continua H(s=0), denominada H0.
Dise˜ no circuital del controlador de corrien- tete
Elecci´ on del sensor de corriente
La principal ventaja que presentan es que el campo magnético medido solo es sensible a las variaciones de corriente y no a los cambios de tensión. Cuando la corriente fluye en sentido positivo, la salida del sensor da como resultado un voltaje superior a 2,5 V y, para negativo, inferior.

Elecci´ on de llaves de conmutaci´ on
Para protegerlo, se coloca un diodo TVS entre la puerta y la fuente de cada transistor para limitar el voltaje desarrollado en la puerta a un valor seguro. Cuando se cambia el voltaje, se pueden generar oscilaciones en la señal de control, lo que puede provocar una activación incorrecta del MOSFET.

Elecci´ on y an´ alisis del driver de corriente
La implementación del controlador bootstrap permite obtener un voltaje de 36V en la puerta del MOSFET superior con respecto a GND, para lograr una diferencia de voltaje mayor a 7V entre la puerta y la fuente. De esta forma se alcanza una tensión de 36 V con respecto a GND en el elgate y genera un cambio.

Configuraci´ on de tiempo muerto
Dimensionamiento de capacitor de bootstrap
El condensador de arranque proporciona energía durante la carga delegada y siempre que el transistor esté encendido (debido a la resistencia RGS). Por lo tanto, una capacitancia superior a 2,61 µF da como resultado una caída de menos de 0,1 V en el condensador de arranque durante el tiempo de encendido de los MOSFET.

Dimensionamiento de los capacitores de fuente
Por lo tanto, los capacitores de baja ESR se colocan en paralelo, como se muestra en la Figura 3.17. De esta forma, al sustituir en la ecuación 3.31, se obtiene que la potencia disipada:.

Etapa de entrada y restador
Adaptaci´ on de salida del sensor de corriente
Para que los valores de Vsns coincidan con los de VILref se debe restar el punto de operación. Esto significa una tensión de salida del sensor de efecto Hall de 13,3 mV por encima y por debajo del punto de trabajo.
Comparador con hist´ eresis y oscilador auxiliar
Se utiliza un amplificador operacional de retroalimentación positiva para implementar el comparador de histéresis. La figura 3.23 muestra la conexión entre una etapa de conmutación con histéresis y una etapa de oscilador auxiliar.

Elecci´ on de amplificadores operacionales
Conexi´ on de oscilador con el MOSFET driver
Simulaciones del controlador de corriente
Se˜ nales en r´ egimen permanente
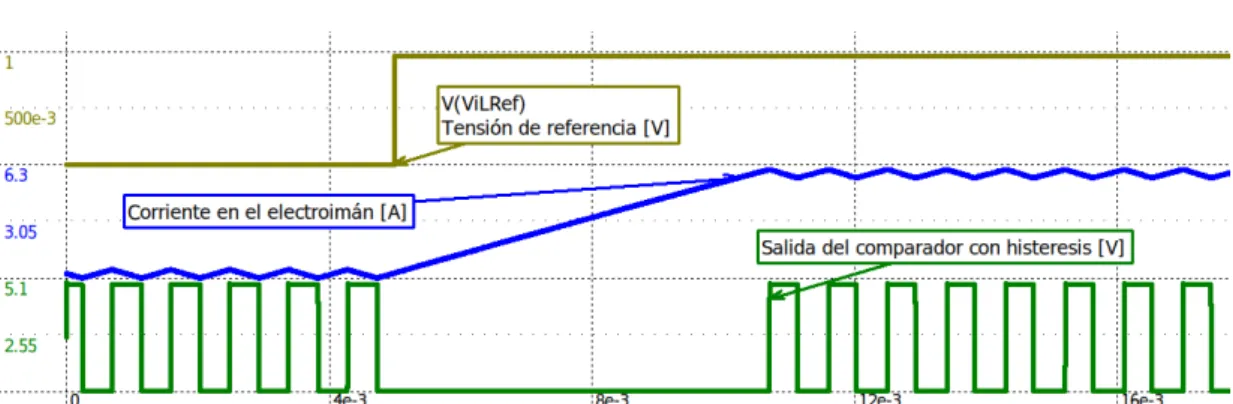
A partir de esta simulación se realizaron mediciones de las variables del sistema para verificar que coincidan con los parámetros que se utilizaron para el diseño.

Simulaci´ on de escal´ on en la referencia de corriente
Aunque el comparador de histéresis mantuvo baja su salida durante la transición, el interruptor auxiliar continuó cambiando con el ciclo de trabajo constante, como se muestra en la Fig. 3.29. La simulación de la figura 3.29 se realizó con una frecuencia de conmutación auxiliar inferior a la utilizada en el diseño.
Simulaci´ on de caso con corriente instant´ anea nega- tivativa
Caracter´ısticas est´ aticas y din´ amicas del con- troladortrolador
- Corriente media del electroim´ an
- Frecuencia de conmutaci´ on de la corriente
- Ancho de banda del controlador
- Transferencia lineal del controlador de corriente
La dinámica del regulador, dependiendo de la inductancia, también depende del entrehierro. Aunque la dinámica del controlador de corriente se ve afectada por la distancia de separación, solo se considera la dinámica para Yg = 4 mm para el diseño de compensación.

An´ alisis de la estimaci´ on
Se realiza una regresión de mínimos cuadrados sobre los valores de la Tabla 4.1 y se obtiene una expresión de pendiente linealizada, la cual se muestra en la Ecuación 4.3. Luego, cuando pasa por la derivación, se obtiene una onda pulsante, cuyos valores superior e inferior corresponden al aumento y disminución de la pendiente de la corriente.

Dise˜ no del circuito derivador
An´ alisis de estabilidad y compensaci´ on
Por lo tanto, esta frecuencia debe ser mayor que el quinto armónico de la onda triangular actual. El flanco de ganancia de bucle abierto del amplificador operacional junto con su red de retroalimentación de polos agregados H1(s) se muestra en la Figura 4.7.

Etapa de rectificaci´ on
Rectificador
Se parte del supuesto de que en un amplificador operacional ideal, la tensión diferencial (Vd) es igual a cero. Entonces, dado que la entrada no inversora está configurada en 2,5 V, se encuentra el mismo voltaje en la entrada inversora.
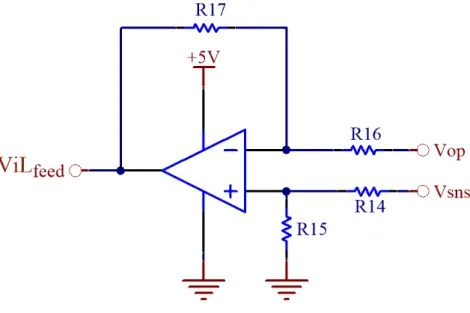
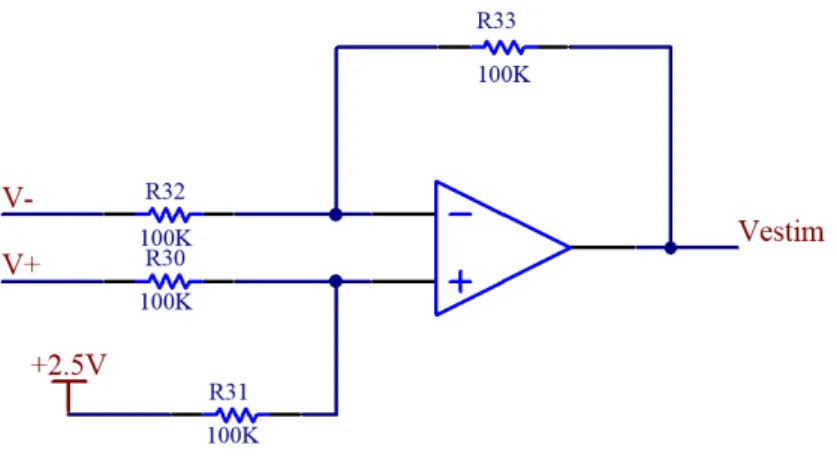
Restador
Esta misma corriente proviene de la salida operativa, a través del diodo D5 y la resistencia R26. Finalmente, el voltaje de salida del restador para cualquier valor de Vderiv se puede expresar como:
Filtrado
Simulaciones de derivador y rectificador
Simulaci´ on en r´ egimen permanente
Esto es causado por el efecto de la resistencia interna del electroimán, que se hace notorio cuando se trabaja con corrientes altas. Esto proviene principalmente del acoplamiento auxiliar, que también es amplificado por la derivación.

Dise˜ no del filtro pasa bajos
La figura 4.18 muestra el resultado de una simulación que agrega el filtro de paso bajo a la entrada. Esta simulación se realizó con las mismas condiciones de corriente e inductancia que en la figura 4.15.

Compensaci´ on de resistencia interna
Para lograr esto, el punto de operación de la salida de derivación debe modificarse para compensar el término RL(YL∗IL . g) que se ha agregado. La figura 4.23 muestra cómo se ha mejorado la forma de onda a la salida del rectificador.

Simulaci´ on del estimador completo
Se elaboró la Tabla 4.3, mostrando el valor de Vestim obtenido en la simulación y el calculado teóricamente (4.2) para diferentes casos de distancia de entrehierro. La tabla 4.3 muestra que los valores obtenidos en la simulación son inferiores a los calculados teóricamente.
Transferencia final del estimador de distan- cia de entrehierrocia de entrehierro
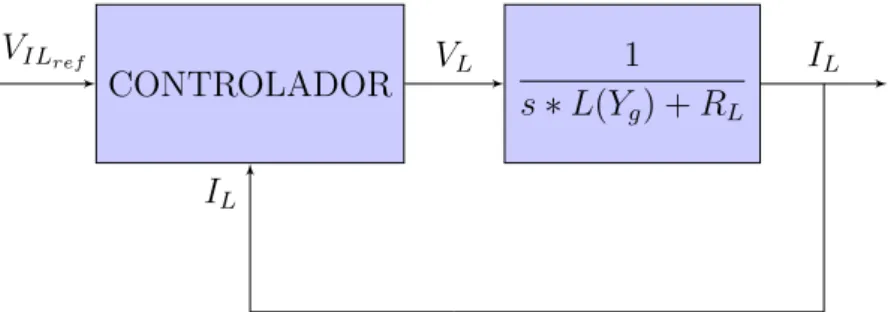
El diagrama de Bode de la transferencia del estimador del espacio de aire se muestra en la Fig. 4.26 mostrado. La figura 5.1 muestra un diagrama de bloques genérico de la estrategia de compensación propuesta.

Dise˜ no del lazo de realimentaci´ on interno
- An´ alisis de estabilidad
- Dise˜ no del compensador
- Verificaci´ on de estabilidad con masa m´ınima
- Transferencia de lazo cerrado
Como se puede ver en el diagrama de bloques de la figura 5.2, se propuso una retroalimentación negativa para compensar el sistema. Es importante señalar que la ganancia de transferencia de bucle cerrado es negativa en ambos casos.

Dise˜ no del lazo de realimentaci´ on externo
C´ alculo de ganancia de entrada
Por lo tanto, se utilizan los mismos valores de Vestim para el voltaje de entrada Vyref. La elección correcta permite que este error sea cero para un cierto valor de voltaje de referencia de posición en la entrada.
![Tabla 5.1: Tensi´ on de referencia [V y ref ] Vs separaci´ on deseada [Y g ].](https://thumb-us.123doks.com/thumbv2/123dok_es/5765856.5468053/172.892.317.514.370.549/tabla-tensi-on-referencia-ref-vs-separaci-deseada.webp)
Transferencia de lazo cerrado
La tabla 5.2 muestra que los valores reales del entrehierro se desvían menos del 1 % del valor deseado. A continuación se muestra el diagrama de bloques de la estrategia de control, teniendo en cuenta los cambios realizados en el carácter de retroalimentación.
Implementaci´ on circuital
- Generaci´ on de tensi´ on de referencia de posici´ on
- Ganancia de entrada y sumador
- Compensador externo
- Sumador del lazo interno
- Compensador interno
Sin embargo, en la etapa anterior se generó una inversión de signo que no estaba prevista en el diagrama de bloques. Para cada red de conductores de fase, se utiliza la topología que se muestra en la Figura 5.28.

Descripci´ on general
Consideraciones para el dominio discreto
Para diseñar un compensador digital es necesario obtener una representación discreta del dispositivo a controlar añadiendo la dinámica ROC. Para ello se utiliza una transformación bilineal para convertir la transferencia en el dominio Z en una nueva variable W, que es de tipo analógico.
Dise˜ no del algoritmo de estimaci´ on
Determinaci´ on de la frecuencia de muestreo
Para estimar la distancia del entrehierro, es necesario medir la pendiente de la onda triangular sin cambiar demasiado su forma. Con este valor es posible obtener 15 muestras en un periodo del triángulo para el caso de máxima Fplant.

Adquisici´ on y procesamiento de las muestras
A medida que la señal aumenta o disminuye durante medio ciclo, se pueden tomar 7 muestras para identificar la pendiente. En el caso de que la señal represente la Fplanta más pequeña, se pueden tomar 23 muestras en un ciclo.