A Carmen Martínez Torres, por la ayuda brindada durante mi estancia en el posgrado de la Universidad Tecnológica de La Mixteca, pero sobre todo por su amistad. Este trabajo presenta el diseño e implementación en una placa FPGA NEXYS2 Spartan-3E, que incluye una FPGA Spartan-3E1200 de la empresa Xilinx, del controlador Integral Proporcional Generalizado mejor conocido en la literatura como GPI, para regulación de voltaje. Salida del convertidor CDCD tipo aterrizaje.
Introducción
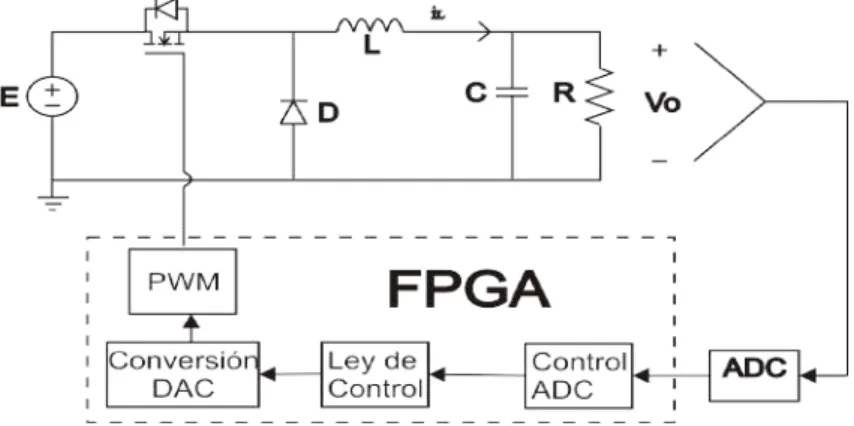
Los sistemas electrónicos de potencia se clasifican según el tipo de conversión de energía que realizan. En los convertidores de potencia se distinguen dos fases principales, que se muestran en la Figura 1.2.

Estado del Arte
Desarrollan un controlador de modo deslizante basado en la técnica GPI para la tarea de ajuste. En [25] se presenta una aplicación digital de una estrategia para observar los voltajes en los capacitores cargados que componen los convertidores multiceldas apilados.
Planteamiento del Problema
¾Cuál es el dispositivo lógico programable que mejor se adapta a la necesidad de implementar la ley de control para regular el voltaje de salida del convertidor reductor. ¾La ley de control y el modulador de ancho de pulso se pueden implementar en la misma plataforma sin necesidad de componentes externos.
Justicación
Hipótesis
Objetivos
Contenido del documento
Resumen: En este capítulo se obtiene dinámicamente un modelo promedio, el cual describe el funcionamiento del convertidor eléctrico tipo CDCD con topología reductora, y también se realiza un análisis de estado estacionario para obtener las ecuaciones características del circuito en modo de conducción continua. (MCC). ), luego se diseña el convertidor en modo de conducción continua a una potencia de salida de 1.44 W, una frecuencia de conmutación de 48 Khz y un rizado de voltaje de salida de 0.5%, y finalmente se simula el circuito en el programa PSIM.
Convertidores CDCD
En el momento en que se enciende el interruptor, está en el estado ON, la corriente fluye a través del inductor que alimenta la carga y el capacitor comienza a cargarse (consulte la Figura 2.2). Durante el intervalo en que el interruptor está en APAGADO, la corriente almacenada en el inductor comienza a fluir a través del diodo y suministra la carga.
Modelo promedio del convertidor reductor
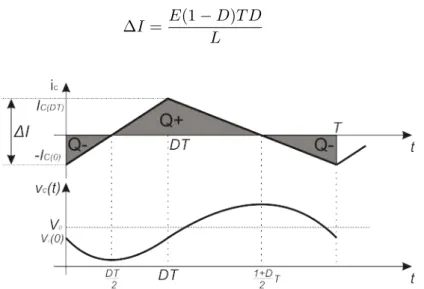
L(t−DT) +IL(DT) (2.14) La ecuación anterior indica que la corriente en el inductor disminuirá con una pendiente negativa−Vo/La desde t=DT. Las formas de las señales de corriente y voltaje en el inductor se muestran en las Figuras 2.5(a) y 2.5(b), respectivamente.

Modulador por ancho de pulsos
Con esto se puede obtener una señal de control con amplitud y frecuencia fijas, pero con ancho variable dependiendo del valor de la comparación entre Vd y Vp. Se presenta el análisis matemático de la suavidad diferencial realizado en el sistema convertidor reductor, así como el análisis del controlador GPI aplicado al convertidor.

Introducción
Una forma de estudiar y resolver problemas de dinámica inversa es utilizar el plano diferencial. En este capítulo sólo nos ocuparemos del uso de la planitud diferencial en sistemas lineales de una sola entrada, una sola salida.
Planitud en sistemas SISO lineales invariantes con el tiempocon el tiempo
El conjunto de ecuaciones (3.3) se denomina parametrización diferencial del sistema en función de la salida plana. Utilizando la transformada de Laplace y teniendo en cuenta las condiciones iniciales iguales a cero en el sistema (3.4), se obtiene la siguiente representación en el dominio de la frecuencia.
Controlabilidad en Sistemas Lineales
Una condición necesaria y suficiente para que el sistema dado en (3.26) sea controlable es la clasificación de la matriz. El rango de la matriz es 2, por lo tanto el sistema es manejable y plano al mismo tiempo.
Controlador GPI
Plano diferencial La primera expresión en (3.53) se obtiene mediante integración directa de la expresión polinómica diferencial dada en (3.51). De (3.55), la ley de control está diseñada para estabilizar la salida de voltaje del convertidor reductor, para obtener un voltaje deseado, denotado como F. En esta parte de la simulación, la prueba se realizó con un voltaje de referencia de 12 V.

Representación de números en Punto otante
El valor del exponente E, que es de 8 bits, puede representar un intervalo de 256 números, pero en el siguiente apartado se verán más detalles sobre la representación de los exponentes. El estándar tiene cuatro tipos numéricos además de los números normalizados que se muestran en la Tabla 4.2. Igualar el exponente más bajo (E2) y el más alto (E1), para ello también es necesario desplazar la significancia (S2) hacia la derecha tantas veces como la diferencia entre los exponentes.

VHDL 53
VHDL
Lenguaje de simulación de modelos, con el que se pueden construir circuitos muy extensos mediante diagramas o texto y luego simularlos. El lenguaje de entrada de diseño, al ser un lenguaje de alto nivel, permite diseñar como programas de computadora. Además, cualquier usuario puede diseñar una aplicación en VHDL y comercializarla sin problemas al no ser un lenguaje propietario.
VHDL 55 1. Descripción de circuitos en VHDL
Algunas de las metodologías más conocidas son la metodología ascendente (bottom-up) y la metodología descendente (top-down). 1Conjunto de herramientas de hardware y software que ayudan en el proceso de diseño de sistemas electrónicos. La metodología top-down (top-down) af) es un proceso contrario a la metodología anterior.

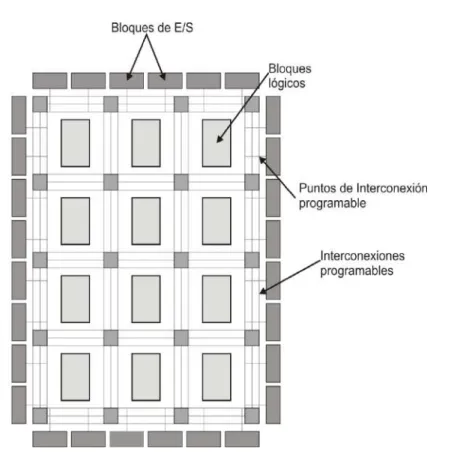
Arreglo de Compuertas Programables en Cam- po FPGA
La gran libertad disponible para interconectar estos bloques otorga a las FPGA una gran flexibilidad. Otra diferencia importante entre FPGA y CPLD es que en la mayoría de los FPGA puede encontrar funciones de alto nivel (como sumadores y multiplicadores) integradas en la propia matriz de interconexión, así como en los bloques de memoria. La arquitectura básica de una FPGA consiste en una matriz de bloques lógicos que incluyen ip-ops con formas para que el usuario configure a) la función en cada bloque lógico, b) las entradas y salidas, y, c) la interconexión entre los bloques. (ver figura 4.5). Cada familia de FPGA se diferencia entre sí en la estructura y funcionalidad de los bloques lógicos, el sistema de interconexión y los recursos de arquitectura específicos de la aplicación que incluye.
Introducción
Resumen: Este capítulo presenta el diseño e implementación de un sistema convertidor CDCD tipo buck, el cual consiste en una implementación de un convertidor buck en modo de accionamiento continuo a 1.44 W y un controlador GPI implementado en una FPGA. El diseño y modelado de unidades aritméticas de punto flotante de 32 bits se realiza mediante una metodología descendente. Siguiendo las unidades diseñadas previamente y el diseño del controlador GPI en el Capítulo 3, se diseña el controlador GPI en lenguaje VHDL.
Circuito convertidor reductor
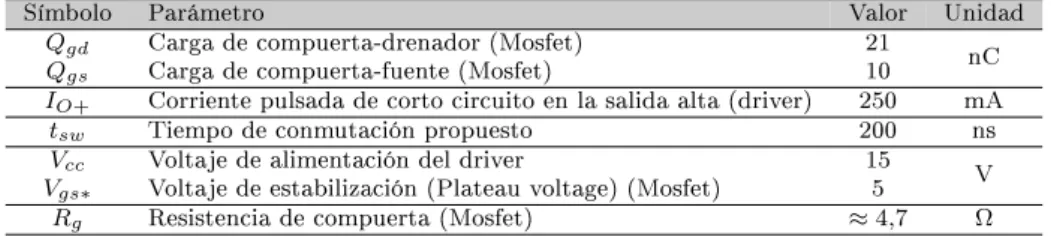
De manera similar, la figura 5.4 muestra el voltaje de ondulación presente en el capacitor del convertidor. Donde Vcc es el voltaje de suministro del controlador, VF es el voltaje de recuperación del diodo y VBSU V− es la caída de voltaje negativa del suministro del lado alto. VBSU V− Caída de tensión negativa de la fuente del lado alto 9 VGEmin Tensión mínima de puerta-emisor > VBSU V− 9.2.

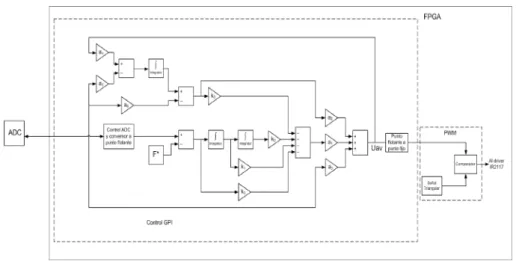
Sistema de control GPI
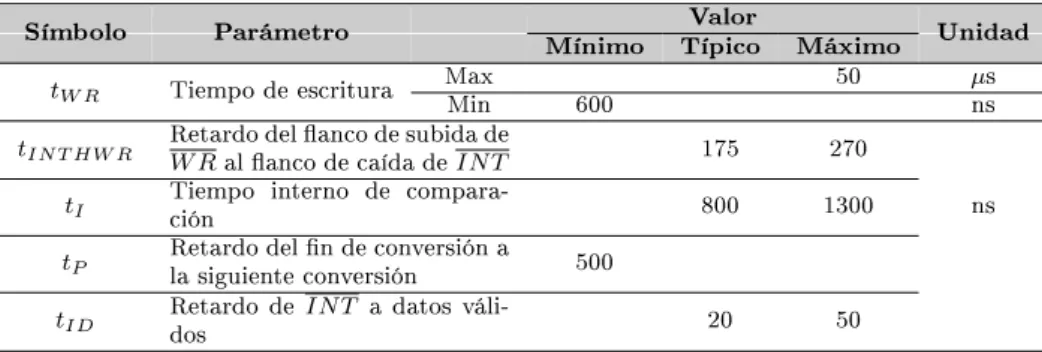
La Figura 5.11 muestra el símbolo del módulo de control ADC obtenido de la descripción usando VHDL. El diagrama de bloques de la Figura 5.13 muestra que es necesario diseñar unidades de suma, multiplicación e integración de punto flotante. La figura 5.16 muestra el símbolo de la unidad de multiplicación en coma flotante; Además, la Tabla 5.9 proporciona una descripción detallada de las entradas y salidas de este módulo.
Resultados Experimentales
Esta carga dinámica está representada por un motor de CC que perturba el voltaje de salida del convertidor reductor. La figura 5.41 muestra una respuesta temporal del voltaje de salida del convertidor reductor. Así, la Figura 5.45 muestra el desempeño de los controladores GPI y PID en la respuesta transitoria de la señal de voltaje de salida del convertidor reductor.

Conclusiones
Una de las ventajas de implementar el controlador GPI en la FPGA es que no se necesitaban muchos componentes externos. Otra herramienta de co-simulación que nos permitió observar en simulación la respuesta del controlador en la FPGA fue la co-simulación entre Psim y Matlab/Simulink, de manera que se realizó la simulación del controlador GPI en Matlab/Simulink y en Psim la Simulación del circuito convertidor reductor. La implementación del controlador GPI permitió observar su desempeño en la respuesta transitoria del convertidor reductor para diferentes valores deseados del voltaje de salida.
Perspectivas
Conclusiones y perspectivas un módulo de comunicación USB, para actualizar los valores de los parámetros del controlador GPI de manera eficiente y rápida. Se propone como trabajo futuro el análisis, diseño e implementación de un control GPI digital para la topología reductora del conversor CDCD. Así como la comparación entre el control GPI digital y el control GPI de diseño continuo.
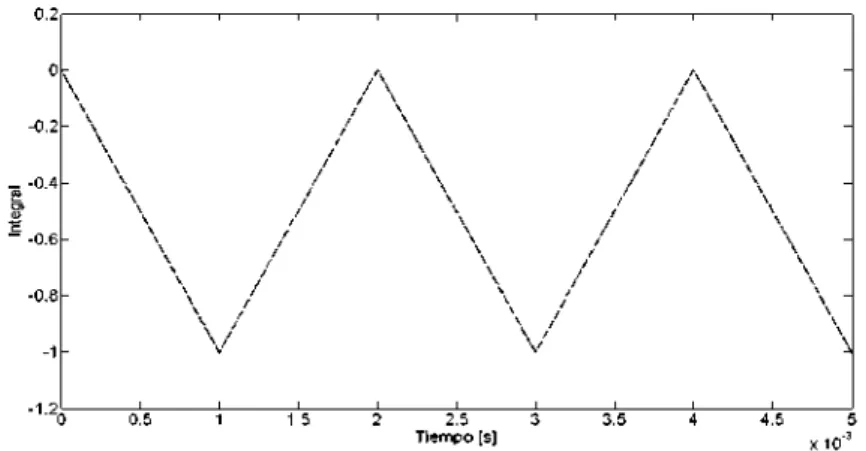
Señal triangular en VHDL
Resumen: este apéndice muestra los pasos para realizar la cosimulación entre Matlab/Simulink y ModelSim. Para ello se realiza la simulación de una onda triangular generada en VHDL, que posteriormente será simulada en ModelSim, y la señal podrá visualizarse en un bloque de osciloscopio Simulink.
Compilando el archivo VHDL
Creando el Modelo en Simulink
De tal forma que deberás acceder al campo de propiedades del bloque y ver como se muestra en la Figura A.5. Ahora está configurado el bloque de cosimulación HDL que representa el modelo de onda triangular VHDL. En los campos del puerto, seleccione la señal de muestra /top/sig1 de la lista de señales y haga doble clic en ella.
Congurando ModelSim para trabajar con Si- mulink
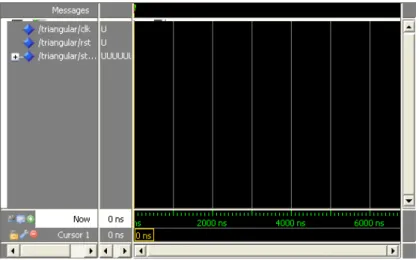
Cargando instancias de la entidad VHDL para cosimulación con Simulink
Modelsim inicializa el simulador y ahora está listo para comenzar a simular la entidad triangular en el contexto del modelo de Simulink.
Ejecutando la simulación
Finalmente, el resultado de la onda triangular se puede visualizar en Simulink, para ello podemos acceder al visor de señales Scope, en el que aparecerá la onda triangular generada, como se muestra en la Figura A.15.
Terminando la simulación
Resumen: este apéndice muestra los pasos para realizar la cosimulación entre Matlab Simulink y Psim. Para hacer esto, se realiza una cosimulación de bucle abierto del circuito convertidor reductor en Psim, y en Matlab/Simulink se muestra el voltaje medido y se especifica el valor deseado del voltaje de salida.
Introducción
Creación del circuito en Psim
Creación del bloque en Matlab/Simulink
Para definir la ruta al archivo Psim, haga clic izquierdo en el botón Examinar. Se presiona el botón Aplicar y aparece una nueva ventana que muestra los nodos de entrada y salida del módulo SimCoupler que se encuentra en el circuito en Psim (Ver Figura B.4). El bloque SimCoupler se actualiza con las entradas y salidas existentes en el circuito en Psim (Figura B.5).

Una comparativa en FPGA entre los controladores GPI y PID para la regulación del voltaje de salida en un convertidor
CD-CD tipo reductor
Buck converter output voltage transient responses with GPI and PID control schemes. Buck converter output voltage transient responses with GPI scheme and average GPI control voltage. The bandwidth of the GPI controller is greater than the PID controller (see Table III), these frequencies are calculated in the closed loop through the damping ratio and settling time [30].