Del contexto anterior, puede resultar obvia la necesidad de crear un dispositivo que trabaje de la mano y apoye el trabajo de esta fuerza auxiliar, reduciendo el número de personas que deben encargarse de tareas específicas y dotando de herramientas adecuadas para ello. vida y físico. su integridad. La materialización de este proyecto, que consiste en la creación de un prototipo funcional de un robot extintor, beneficiará directamente al cuerpo de bomberos de Medellín, realizando tareas de apoyo de manera eficiente y segura.
PRESENTACIÓN GENERAL DE PROYECTO
OBJETIVOS
- Objetivo General
- Objetivos Específicos
DESCRIPCIÓN DEL PROYECTO
- Planteamiento del problema de investigación y su justificación en términos de
- Propósito del proyecto de grado
Se pretende cubrir una cierta laguna en cuanto al trabajo con prototipos robóticos para apoyar a las fuerzas de rescate. Esto se puede comprobar porque no hay registro de ningún sistema funcionando actualmente en el área metropolitana. 16] Es claro señalar que también es útil en la extinción de incendios ya que cuenta con un soporte giratorio e inclinable equipado con una pistola de agua que es totalmente controlada por el operador del robot.
ESTADO DEL ARTE
Katsuyuki Baba y sus colegas [6] inventaron un robot de extinción de incendios autónomo controlado remotamente mediante comunicaciones móviles. El robot contiene extintores que emiten un chorro de agente extintor que sale a través de una palanca. Al AZeIIll, Daher [7] creó un robot de extinción de incendios con un conjunto de marcos y un mecanismo de extinción de incendios ubicado dentro del marco para expulsar un agente extintor en caso de incendio.
![Fig. 3 MVF-5. [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390155.0/12.918.209.796.444.775/fig-3-mvf-5-1.webp)
MARCO TEÓRICO
- Acompañamiento con el Cuerpo de Bomberos de Medellín
- Redes inalámbricas de área personal (WPAN)
- Sistema Operativo Android. [14]
- Arduino Uno
- PID (Proporcional Integral Derivada) [35]
Ellos mismos descubrieron el incendio al verlo a lo lejos mientras atendían otro incidente. Se requiere un sistema de etiquetado basado en la Norma Técnica Colombiana NTC1692 para identificar de manera clara y efectiva los potenciales compuestos almacenados y/o transportados.
![Fig. 5 Modelo de etiquetas para el rotulado y etiquetado de Mercancías Peligrosas. [20] (continua)](https://thumb-us.123doks.com/thumbv2/123dok_es/12390155.0/20.918.241.793.133.528/fig-modelo-etiquetas-rotulado-etiquetado-mercancías-peligrosas-continua.webp)
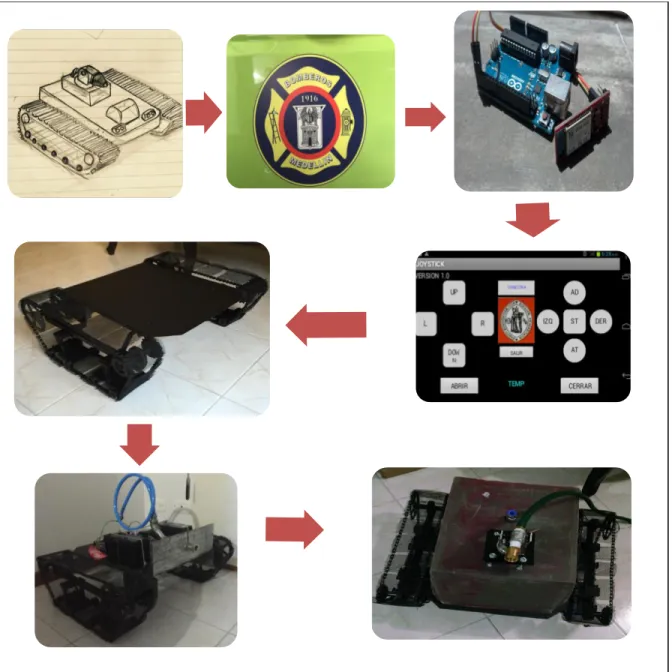
DESARROLLO
Caracterización del prototipo. (Anexo 1)
Desarrollo del prototipo
- Arduino UNO
- Puente H L298D
- Batería 12V
- Sensor de rotación análogo
- Sensor de temperatura LM35 [37]
- Módulo Bluetooth RN-42
- Motor DC
- Servomotor S3003
- Electroválvula
- Soporte e rotación e inclinación
- Cámara inalámbrica
Durante este capítulo se presentarán los detalles técnicos de los componentes que componen el prototipo, acompañados de las funciones que desempeñan. El control de los motores de tracción de 24V se realizó utilizando 4 puertos del Arduino como salidas, los Unos (1) y Ceros (0) lógicos se envían a la entrada del puente H, el control de dirección lógica de este prototipo se puede ver en la Tabla 2, de esta forma se obtuvo el direccionamiento del prototipo. Se encarga de indicarle al Arduino la posición de los servomotores a través de una señal analógica, la misma es recibida, almacenada e interpretada como un valor que es requisito para realizar el cálculo de error dentro de la programación de la corrección de posición.
Se optó por utilizar una electroválvula de 12v, ya que este es uno de los voltajes que tenemos disponibles en el sistema de suministro, además de la caracterización se determinó que todo el sistema de suministro de agua desde la manguera hasta la boquilla sería de ½ diámetro. tubo. ", este tipo de válvula solenoide es accionada por un servomotor y soporta una presión máxima de 136 Psi, la presión máxima de trabajo del prototipo es de 70 Psi, dando así un buen rango de trabajo. Esta es la responsable de la dirección de la boquilla y por lo tanto el flujo de agua que sale del mismo. Está fabricado en aluminio. Este material es resistente y liviano, se eligió para no agregar más peso a los motores. Hay un ángulo de libertad de 90° en los ejes X e Y proporcionado por cada uno de los motores, a continuación se muestra la Figura 17, la cual corresponde al diagrama de conexión de los elementos mencionados anteriormente.
Diseño de sistema de tracción
La Figura 16 muestra un esquema de cómo se fabricaron las vías, chasis y plataforma donde se ubicarían todos los componentes. El sistema de tracción principal consta de un par de orugas, cada una compuesta por: Es necesario que los engranajes fijos, los engranajes locos y la cadena tengan la misma relación de transmisión para asegurar que el sistema gire sin ejercer un esfuerzo extra.
Software
El cierre de la aplicación está programado en el botón “SALIR”, la medida era que había que presionarlo durante 3 segundos, para evitar que la aplicación se cerrara por una acción incorrecta. Como se muestra en la Figura 12, la HMI cuenta con una caja en la que se puede visualizar la temperatura interna del prototipo. Estos datos los proporciona un sensor conectado al Arduino en el que escala la señal y la convierte en datos de temperatura en grados Celsius. y enviarlos al dispositivo móvil más tarde. Luego se definen las variables globales, seguido del Void Setup, donde se declaran los pines que se utilizarán y cómo se utilizarán (entrada o salida).
En el vacío de Geterror se encuentra el código que se encarga de calcular el cambio de posición de los servomotores, al leer la posición indicada a través de los comandos de dirección se realiza una comparación con la señal recibida del sensor de rotación que indica cuál es la posición actual. es. del servomotor, CalculatePID, que es el responsable, lo encuentra. Finalmente se realiza la comparación para identificar los valores que han sido serializados por el dispositivo móvil; Estos comandos permiten que el robot de extinción se ponga en marcha. El código se encuentra en el Anexo 2, se recomienda interpretar la descripción anterior, realizando un análisis simultáneo del código en el lenguaje Arduino.

Diseño Carcasa
Pruebas de presión
Para realizar estas pruebas se utilizó el PLC del laboratorio para el control de la motobomba, así se pudo tener el porcentaje exacto de trabajo de la motobomba, se fijó un porcentaje, luego se dio un periodo para la estabilización de la bomba y finalmente se tomó la medida de la presión. Luego de comprobar que no se había producido ningún tipo de fuga, se procedió a la conexión del prototipo a un camión de bomberos. Fue necesario conectar un reductor tipo “Bushing” ya que el diámetro de la salida del camión de bomberos es de 1 ½” y la salida de la manguera es de ½”; Al iniciar la maniobra es necesario que la válvula solenoide del prototipo esté cerrada, esto es por recomendación de los bomberos.
La presión de esta carga inicial es de aproximadamente 10 Psi, como se muestra en la Figura 33. Debido al efecto Venturi, la presión en la manguera será menor que la presión en la salida, como se muestra en la Figura 34, que se refiere a las 2 presiones. manómetros, uno en la entrada de la manguera y el otro en la salida de la conexión de 1 ½”. La presión máxima aplicada al prototipo fue de 60 PSI. Esta limitación seguía las características de los servomotores encargados de dirigir el soporte de rotación e inclinación.

RESULTADOS
CONCLUSIONES
Este manual de usuario tiene como objetivo proporcionar documentación clara y precisa respecto de las características del prototipo para su correcto manejo; que puede ser útil tanto para aspirantes a bomberos como para profesionales y voluntarios. CONEXIÓN: Con un clic, el dispositivo se conecta al módulo Bluetooth, si la conexión es exitosa, el botón cambia su nombre a APAGADO. Es recomendable lubricar el sistema de tracción para alargar su vida útil; Al finalizar las maniobras que requieran el uso de agua, se debe secar el prototipo con un paño suave y asegurarse de drenar el agua almacenada tanto en la manguera como en el sistema de alimentación del prototipo.
A continuación se conecta y confirma que el Bluetooth del dispositivo móvil está encendido, luego se abre la aplicación Joystick, en la cual aparecerá un menú que contiene todos los comandos de funcionamiento del prototipo como se muestra en la figura 1. Antes de iniciar cualquier maniobra, se debe tener un conocimiento claro sobre el funcionamiento del prototipo y se recomienda el apoyo constante de un experto en incendios cuando se requiera conexión a un camión de bomberos.**. La conexión trasera del prototipo tiene un diámetro de ½”, dependiendo del modelo de camión de bomberos con el que se vaya a realizar la conexión, es necesario contar con los elementos adecuados para asegurar una conexión sin fugas.

Lo que el proyecto puede ayudar es que solo se necesita una persona para manipular la manguera, de modo que los bomberos que tienen que operar la manguera realicen mientras tanto otra acción. Normalmente trabajamos con presiones que varían entre 30 Psi y 85 Psi, cuidando de no exceder los 100 Psi en el propulsor para evitar accidentes, ya que es muy difícil controlar la manguera; La torre tiene una configuración operativa máxima entre 120 Psi y 130 Psi, para no sobrecargar el sistema de engranajes de la bomba. El manómetro de la izquierda indica la presión en el absorbente, donde se alimenta el circuito de la bomba, y el manómetro de la derecha indica la presión del medio eyector, que consta de tres salidas de 1,5, 2 centímetros y medio, como así como La cúpula; Hay que tener precaución porque la salida y la entrada están relacionadas, es decir, si la cantidad de agua que sale es mayor que la que entra, el.
Es muy importante que todas las tuberías de descarga estén cerradas cuando se utiliza el sistema de absorción y que tengamos cuidado con el agua que sale del hidrante, porque si tiene mucho sedimento puede causar daños en las tuberías; También tiene mucho cuidado en controlar el llamado "golpe de ariete", que se produce por la presión en el hidrante, para evitar estos efectos se debe abrir en tres la válvula que controla el paso a la entrada del hidrante. . etapas, transfiriendo la palanca a las posiciones 1, 2, 3 con un período de espera entre cada una de ellas (ver imagen); Esto evita daños a los sellos internos de la bomba. NFPA 10, 13 (sistemas de rociadores, que son sistemas de rociadores automáticos y son los más efectivos en la protección contra incendios) 14 y NFPA 20, que corresponde a tanques de manguera. También podemos ver este prototipo no solo como un lanzador de agua, sino que también puede lanzar polvo químico para saturar el ambiente regulando la temperatura, pues cuando hacemos esto los bomberos deben abandonar el lugar inmediatamente, porque también es perjudicial para nosotros. hasta cierto punto, y a su vez tendríamos una panorámica con ayuda de una cámara, luego en el futuro podría ser el doble.
Puede tener un sensor ambiental como medidor de oxígeno, como complemento, porque a veces lo más importante no es apagar el fuego primero, sino determinar cuál es la situación para que entren los demás compañeros”. PONCE, “ESTUDIO DEL ESTÁNDAR IEEE 802.15.4 “ZIGBEE” PARA COMUNICACIONES INALÁMBRICAS DE ÁREA PERSONAL DE BAJA POTENCIA Y COMPARACIÓN CON EL ESTÁNDAR IEEE 802.15.1.

![Fig. 6. Conexión de diferentes dispositivos mediante Bluetooth [9].](https://thumb-us.123doks.com/thumbv2/123dok_es/12390155.0/25.918.191.812.127.548/fig-6-conexión-diferentes-dispositivos-mediante-bluetooth-9.webp)
![Fig. 7 Arquitectura de Android. [14]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390155.0/26.918.175.834.263.915/fig-7-arquitectura-android-14.webp)



