A mis asesores por su valioso tiempo en la revisión y aprobación del proyecto, y en especial al Dr.
INTRODUCCIÓN GENERAL
- OBJETIVOS
- Objetivo general
- Objetivos específicos
- Hipótesis
- Estructura de tesis
- Literatura citada
Con el desarrollo de un sistema de siembra autónomo, en agricultura convencional, se mejora la dosificación de la semilla y se aumenta la productividad de la máquina. Para el tercer capítulo se basó en el desarrollo de un sistema de plantación para un vehículo autónomo que se realizó en la Universidad Autónoma Chapingo en México. Desarrollo de un sistema de siembra neumático de alta precisión para labranza de conservación para tractores de media potencia Terra Latinoamericana, Sociedad Mexicana de la Ciencia del Suelo, A.C. Implementación de maquinaria ligera y tracción animal mediante un enfoque de ACV modular.
REVISIÓN BIBLIOGRÁFICA
- La siembra de precisión en la agricultura
- Sembradoras
- Dosificador de platos horizontales o convencionales
- Dosificador por dedos
- Dosificador por vacío
- Distribución de semilla
- Sistemas inteligentes para densidad variable de siembra y fertilización
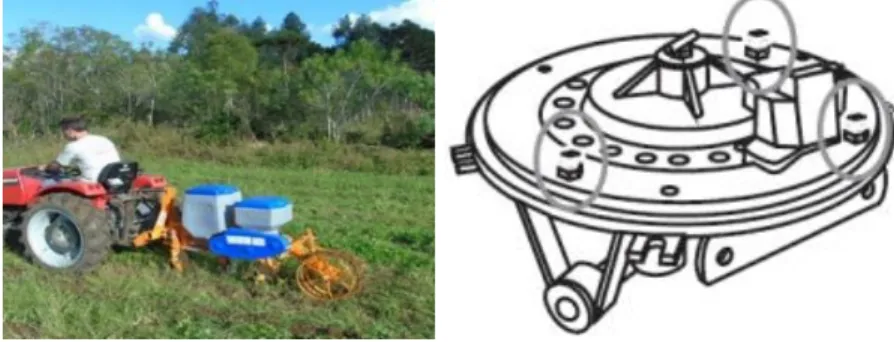
Según estudios, estos sistemas presentan dificultades, principalmente en caso de daños mecánicos y cuando aumenta la velocidad e irregularidad de la profundidad de siembra (Figura 1). Básicamente es un plato que gira en el fondo del tanque y tiene agujeros del mismo tamaño que las semillas. Variabilidad de una sembradora experimental preparada con dos sistemas de dosificación en implementación de soja.
DESARROLLO DE UN SISTEMA DE SIEMBRA PARA UN VEHÍCULO
Resumen
Abstract
Introducción
Su bajo potencial no logra estimular la economía del país. 2007) mencionan que existe una demanda potencial en el país de 2.000 sembradoras de alta precisión para labranza de conservación en condiciones de lluvia, para tractores de mediana potencia, en los estados del sur. Según Zepeda y Lacki (2003), nos dicen que si no se moderniza el sector agrícola y la agricultura, el desafío de la productividad agrícola no se abordará con éxito. Actualmente, el uso de técnicas como la agricultura de precisión o localizada se ha beneficiado de la obtención de altos rendimientos, manejando la variabilidad espacial y temporal a nivel entre parcelas para mejorar el impacto económico y reducir el impacto ambiental (Fountas et al., 2003; Torres et al. otros, 2018).
Por lo tanto, la siembra de precisión se relaciona con el éxito de un cultivo, el cual se logra mediante el uso de sembradoras con funciones como abrir el surco a la profundidad deseada, distribuir granos individuales, regular la distancia entre granos, cubrir y compactar la semilla con tierra. . Kepner et al., 1982). 2015) señala que el uso de una sembradora de precisión en semillas de maíz reduce daños mecánicos y horas de trabajo y logra espaciamientos y profundidad de siembra homogéneos. En otro sentido, Abdulrahman et al. 2017) menciona que los sistemas robóticos han sido importantes en todos los campos, organizaciones y unidades industriales.
Por lo tanto, la tecnología robótica se puede utilizar en diversas labores agrícolas, especialmente en la siembra de semillas, el arado y otras tareas, y reduce la necesidad de mano de obra (Jayakrishna et al., 2018). Con base en lo anterior, el objetivo de este trabajo fue desarrollar y evaluar una sembradora de precisión autónoma para el robot agrícola “VOLTAN” mediante la programación de un algoritmo para su funcionamiento autónomo embebido en el mecanismo dosificador de semillas. Además, instalar un sistema para evitar la saturación en la descarga de semillas y detectar semillas depositadas en el suelo o línea de siembra.
Lograr así una agricultura remota y presencial y aumentar la productividad en las regiones marginadas de México.
Materiales y métodos
- Ubicación del proyecto
- Diseño de sembradora de precisión
- Diseño digital en 3D de la sembradora
- Sistema electrónico de la sembradora
- Sistema mecánico de la sembradora
- Sistema de siembra
- Sistema de control profundidad
- Sistema de corte de suelo
- Conexión del circuito eléctrico de la sembradora
- Programación del algoritmo para detección y conteo de semilla
- Pruebas de funcionamiento y evaluación de sembradora
- Pruebas de disco de corte
- Pruebas de funcionamiento y evaluación de sistema de siembra en campo. 31
- Sistema de corte de suelo y sistema de control de profundidad
- Sistema de siembra
- Ensamble general de sembradora
- Diagrama de flujo para el sistema autónomo de la sembradora
- Caracterización técnica de la sembradora
Una vez definida la solución óptima para los sistemas y componentes, se desarrolló el dibujo 3D en el software Solid Works 2016®, como se muestra en la Figura 9. En la parte trasera, el sistema de control de profundidad se montó mediante un perno pivotante. la rueda, y se instaló una rueda con el codificador para saber la distancia recorrida, y en la parte delantera se unió el motor al disco cortador de tierra. El sistema de siembra consta de componentes mecánicos, sensores y actuadores electrónicos, mostrados en la Figura 10A: a) tanque de semillas, b) cubo dispensador vertical, c) cincel para apertura del surco, d) caja de circuitos y e) chasis principal.
Asimismo, en la Figura 10B se muestran los sensores y actuadores electrónicos que automatizaron el sistema de siembra, f) motor paso a paso de 12 voltios, g) diodo láser, h) módulo receptor láser i) Arduino Atmega 2560, j) controladores IBT4, k) un módulo con dos Relés HL-52S, y l) Batería de 12 Voltios. Este sistema está desarrollado con componentes mecánicos, para ello se adapta al chasis principal de la semilla en su parte inferior, como se muestra en la figura 11. Principalmente consta de a) resorte de compresión y pilar para ajuste de la profundidad de siembra. b) Rueda de control de profundidad. El sistema de corte de suelo fue rediseñado debido a que el disco no tenía el diámetro correcto y además la posición de la batería como se muestra en la figura 10, el mismo estuvo conformado por los siguientes componentes: a) disco de corte de 25.4 cm, b) chasis del sistema de corte, c) Motor eléctrico de 12 voltios y d) batería de 12 voltios (Figura 12).
La conexión del circuito se realizó como se muestra en la Figura 13, donde se muestra la configuración del sistema de corte de suelo, sistema de siembra con dosificación autónoma. Para ello se utilizaron dos tarjetas Arduino MEGA 2560, una que proviene del robot y otra que controla todo el sistema de siembra. Para completar el sistema de siembra se instaló en la descarga un circuito de detección y conteo de semillas con un diodo láser EE-SHT126 (a) como transmisor y un receptor láser EE-SHT126RM (b), creando así un sensor láser. imagen infrarroja 14.
Se realizaron pruebas operativas en campo del sistema de corte del suelo, seleccionando un campo con labranza mínima y otro campo con labranza tradicional. A partir del diseño digital 3D Figura 9 (A), se modificó el sistema de corte del suelo como se muestra en la Figura 20, se cambió a 25.4 cm de diámetro del disco, lo que permitió romper el suelo y alcanzar el cincel de 5 a 7. centímetros de profundidad en las plantas; en tierra con LSR. El robot sembrador se comportó de manera estable con el sistema de visión artificial, que identifica dos líneas presentadas (verde) y encuentra el centro de gravedad para desplazarse hacia la cabecera y así rotar usando la función de control remoto.

Conclusiones
38 En cuanto a la velocidad de trabajo, según Pittala-Rajaiah et al. 2016) en su prototipo electrónico para siembra directa muestra valores de hasta 3.0 km h-1, el cual es inferior a los resultados encontrados en el prototipo y además nos dice que un dispositivo con estas características debe tener la capacidad de ser movido por un persona, así como el que se muestra en la Figura 24.
Agradecimientos
Literatura citada
Mecanización agrícola en la agricultura de pequeña escala, un estudio de caso; Cunco IX Región Chile. Sistema mecatrónico para controlar los dosificadores de fertilizante granulado y pesticida de un fertilizante para semillas.
Anexos
Trámite de patente
Resumen en congreso agronómico 2019
Resumen en congreso agronómico 2020
Para el segundo capítulo, se presenta una visión general del estado del arte sobre la actividad de la siembra de precisión en la agricultura, los tipos de siembra disponibles en México y los sistemas de siembra inteligentes. Según Soza et al. 2011) la dosificación de un solo grano en coincidencia con una conductancia recta y baja altura de caída presenta mejor comportamiento, evaluado a través del índice de calidad, donde surge una diferencia sustancial en la reducción de duplicidades y, en menor medida, fallas relacionadas con el sistema. dosificación por chorro y el tubo conductor cilíndrico alto. En la Tabla 2 se enumeran los componentes utilizados, para los cuales se desarrolla la programación en la placa Arduino, y se automatiza el motor paso a paso mediante el codificador incremental y se manipula con el controlador puente H. Luego, se inicia la activación del sistema y del disco de corte con los relevos.
Al tener el diseño óptimo se fabricaron los componentes de cada sistema; Comenzamos con el chasis principal de la sembradora, que soporta la batería de 12 Voltios, el dosificador en la parte central superior y en la parte inferior, el cincel abre surcos y finalmente el gabinete del circuito. Para romper la tierra y cortar la maleza se utilizó una hoja de sierra de 10 pulgadas de diámetro con un borde afilado en la periferia, accionada por un motorreductor de 12 Voltios con 93 revoluciones. minuto. El algoritmo programado activa el diodo láser y el receptor láser en ALTO cuando recibe la señal de la semilla que pasa e interrumpe el rayo láser para ponerlo en BAJO como se muestra en la Figura 17.
Para la evaluación de la sembradora se preparó una parcela experimental de 25 por 25 metros (24 hileras de 24 m) con una densidad poblacional de 1846 plantas por área para una distancia entre plantas de 0.13 m, donde estuvo la productividad de la planta. Se determina la máquina y la calidad de la siembra en campo para obtener la caracterización técnica. Además, se mejoró el funcionamiento del control de profundidad agregando un pasador de 10 cm y una manija para ajustar la altura de la llanta del compactador, en este componente la rueda no tocaba el suelo y se adaptó un resorte, así como la batería. en la parte de atrás. como contrapeso. El sistema de siembra cuenta con un distribuidor para depositar la semilla en cada toma, por lo que Soza et al. 2011) demuestra que la dosificación monograno en coincidencia con una conductividad recta y baja altura de caída presenta mejor comportamiento, evaluado a través del índice de calidad, donde surge una diferencia sustancial en la reducción de duplicaciones y, en mayor medida, pequeñas fallas en relación a la vida. el sistema de dosificación y el tubo de conducción cilíndrico alto.
Sin embargo, todavía existen problemas con la dosificación, porque la diferencia de patinaje no proporciona la precisión ni la distancia deseada entre las semillas. 35 paradas, lo que dificulta su funcionamiento y tiene problemas para seguir funcionando porque sigue tirando semillas. Para esto se ha desarrollado el diagrama de flujo para declarar variables de entrada y salida para que realice acciones sobre los motores (70° de rotación en el eje) y el plato dosificador libere una semilla cada 13 cm, como se muestra en la Figura 22.
Según pruebas realizadas en OCIMA-INIFAP-2019, el robot tiene una fuerza horizontal sobre la barra de tiro de hasta 147.15 Newtons, y con unas dimensiones óptimas sin afectar su estabilidad, el robot tiene la tracción necesaria para tirar de la sembradora incluso en suelo sin suelo. Además, se realizaron dos resúmenes para su publicación en el informe del congreso agronómico (CINCA) 2019 y 2020, los cuales se pueden ver en los anexos apartados 4.2 y 4.3.