Introducción
Monitoreo y detección
El monitoreo ambiental es un proceso que contiene muchas etapas, una de las cuales es la detección de objetos de interés y su seguimiento. Durante la Segunda Guerra Mundial se produjo un notable desarrollo de las técnicas de teledetección aérea.
Visión artificial y algoritmos de detección
- Visión artificial
- Algoritmos de detección
Sin embargo, este podría ser el principio de las técnicas de procesamiento de imágenes, pero no de la Visión por Computador como se ha definido. El concepto de visión artificial es más amplio y recupera todos los conocimientos de análisis de imágenes que otras disciplinas han realizado desde los inicios de la fotografía.
Quadrotor
Para solucionar el punto anterior se utiliza GLRT, que no requiere información de señal, pero sí la matriz de covarianza de fondo. La necesidad de aviones con mayor maniobrabilidad y autonomía ha llevado a una mayor investigación sobre estos sistemas.

Justificación de Tesis
Objetivo principal de Tesis
Objetivos particulares
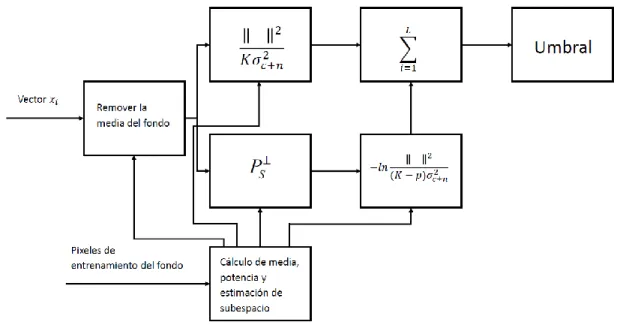
La estimación del subespacio objetivo se realiza descomponiendo la matriz de covarianza de fondo. Para calcular el valor umbral, utilizamos mil iteraciones del procesamiento de detección dentro de la matriz de procesamiento.
Estado del arte
Ruido
Sus principales fuentes son el ruido de los sensores, las perturbaciones en la transmisión y la digitalización de imágenes. En esta tesis, para desarrollar modelos de señales obtenidas mediante una cámara digital, se utilizan modelos de reflejos de luz de la superficie del mar, de la superficie del objeto flotante y del ruido de la propagación de la señal y del canal de cantidad.
Distribución normal o gaussiana
La moda, el punto en el eje horizontal donde la curva tiene su punto máximo, ocurre en x. La curva normal se acerca asintóticamente al eje horizontal a medida que se aleja de la media en cualquier dirección.
Criterios de detección
Ambas hipótesis se prueban para determinar el estado de la región que se está monitoreando. Donde se determina el costo asociado a tomar una decisión a favor de la hipótesis Hi cuando Hj es cierta.

Criterio de Neyman-Pearson y razón de verosimilitud
Para esta condición, la variable es el valor de probabilidad de falsa alarma establecido por el usuario, y PF es el resultado dado por la prueba estadística. El criterio de Neyman-Pearson conduce a una prueba de razón de verosimilitud que es igual a (2.18), excepto que el umbral está determinado por el valor elegido para la probabilidad de falsa alarma. No es necesario determinar el nivel de probabilidad de falsa alarma para utilizar el criterio.
A partir de la maximización de la ecuación anterior es posible obtener una prueba de razón de verosimilitud.
Modelos de reflexiones desde el mar y desde el blanco de interés
En [26] se propone una aproximación estructural para la matriz 𝑯 que genera el subespacio. Para estimar el subespacio de fondo (indicado por 〈𝑩〉), es posible utilizar ambos métodos mencionados anteriormente. Los primeros 𝑄 vectores propios significativos de la matriz de correlación se utilizan luego para formar la estructura mediante la cual se define el subespacio de fondo.
Siendo P la matriz de proyección del subespacio 〈𝑯〉, esta es la matriz que genera el espacio.
Estructuras de los detectores óptimos
Al conocer las funciones de distribución de probabilidad para cada hipótesis, la condición de fondo se puede evaluar mediante una prueba de razón de verosimilitud. La prueba de razón de verosimilitud se realiza con base en la razón de las funciones que determinan la línea de base para cada hipótesis [29]. El uso de la prueba de razón de verosimilitud requiere un conocimiento previo del objetivo y de las condiciones ambientales.
Cuando queremos una prueba que nos permita evaluar el estado del fondo con parámetros desconocidos, aplicamos la prueba del índice de verosimilitud general (GLRT.
Diseño de detectores ASD y MASD
Con los datos primarios, se estima la variación del ruido de fondo y del canal en H1 para cada píxel dentro del área observada. GRLT se deriva primero de los datos primarios suponiendo que se conocen la varianza (2 0.2j) y la matriz de covarianza normalizada (R) del ruido de fondo y del canal. La contribución del segundo término depende de la relación entre la varianza estimada del ruido del canal (2.65) en cada vector de píxel y la varianza del ruido de fondo y del canal ˆ2.
Se describe el enfoque estadístico del problema de detectar un objeto flotante en la superficie del mar en presencia de ruido de canal.
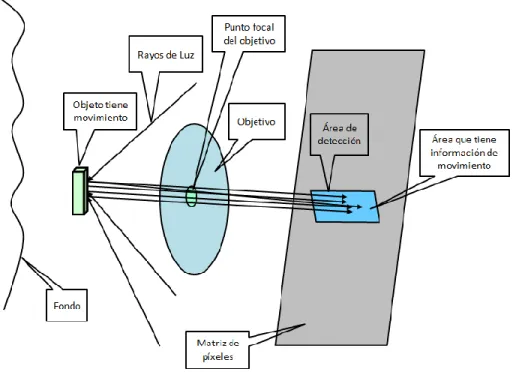
Descripción de señales recibidas desde el área de un pixel en superficie marítima
Cuando el área de un píxel es mucho mayor que el tamaño del objetivo, el voltaje de un píxel es proporcional a la energía reflejada del objetivo y el fondo [40]. En ausencia de blanco, el voltaje del píxel es proporcional a la energía reflejada desde el fondo. Cuando el área de un píxel es mucho más pequeña que el tamaño del objetivo (Figura 3.2), el valor de voltaje registrado en el píxel consiste en reflejos del objetivo.
Entonces el voltaje del píxel es: para la ausencia del objetivo 𝒛 = 𝒄 + 𝒏 (hipótesis H0), y en caso contrario 𝒛 = 𝒔 + 𝒏 (hipótesis H1).

Desarrollo del modelo del blanco
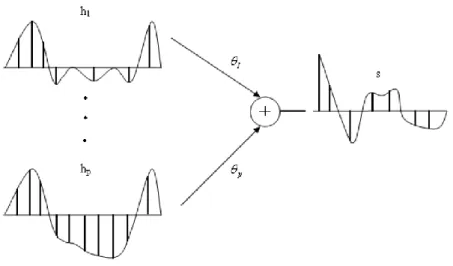
El parámetro θ coloca la respuesta objetivo sHθ en la señal subespacial abarcada por las p < N columnas de la matriz conocida 𝑯, 𝑯 = 𝐶𝑁×𝑝, que es el espacio lineal (𝑁×𝑝) del complejo matricial [ 40]. Considerando que la potencia objetivo fluctúa en videos reales, el vector de amplitud θ para cada armónico está compuesto de valores aleatorios. La secuencia de imágenes de la señal útil se modela como una matriz tridimensional 𝑁 × 𝐿 × 𝐾.
El factor se agrega para cambiar la potencia del ruido mientras que A se usa para aumentar la potencia del objetivo y de esta manera podemos medir la probabilidad de detección para diferentes SBR.
Matrices de proyección y ecuaciones de detectores ASD y MASD
M se define como la matriz de covarianza inversa y se genera tomando la inversa de T y seleccionando las primeras K filas y K columnas, lo que produce una matriz M de dimensiones KK. Ahora que se han creado las matrices del proyector, se pueden insertar en las ecuaciones del detector.
Modelo del mar y los objetos de interés
Evaluación de detectores
- Etapas de procesamiento de detección
- Curvas de detección
Para trazar la probabilidad de detección frente al SBR, el programa debe permitir aumentar la potencia del objetivo, realizar un cierto número de repeticiones y repetir el proceso. Para observar el efecto que tiene el tamaño de la ventana de análisis sobre la probabilidad de detección, así como el número de armónicos seleccionados, se dibujaron las curvas de la Figura 3.5, manteniendo el número de imágenes procesadas en cada una en valores fijos. y el mismo factor de correlación. Los resultados de la Figura 3.5 a) indican que, para el mismo tamaño de ventana, el detector MASD supera al ASD y que cuanto mayor sea el conjunto de datos procesados, mejor será la calidad de la detección.
En la Figura 3.8, se trazan las curvas de detección para una ventana de análisis de 5x5 para diferentes factores de cobertura y dos valores BNR diferentes.

Monitoreo
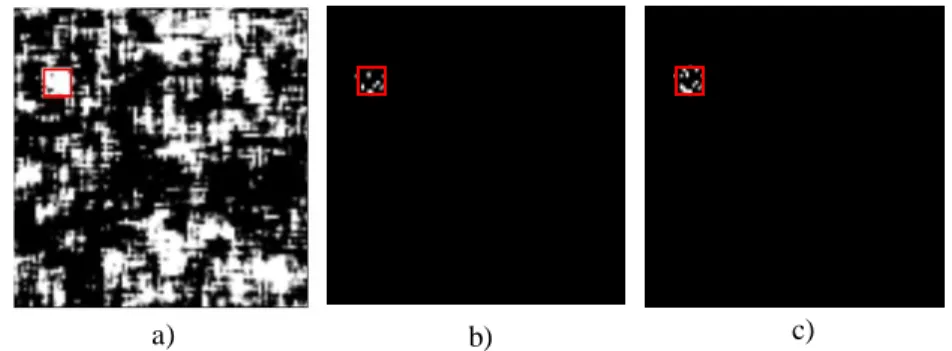
La Figura 3.9 a) muestra el modelo de mar (F), en cuyo espacio se insertó el modelo objetivo (senw) en una posición arbitraria. La Figura 3.9 b) y la Figura 3.9 c) muestran los resultados de monitoreo de los detectores ASD y MASD respectivamente. Se observa que el detector MASD logró un número ligeramente mayor de detecciones correctas que el ASD, pero el mismo número de detecciones falsas.
Se realiza la misma prueba, pero sólo se cambia el número de imágenes procesadas, aumentando a veinte, obteniendo los resultados que se muestran en la Figura 3.10, donde se puede observar que este cambio ha incrementado el número de detecciones correctas en ambos detectores, a mayor extensión para MASD con algunas detecciones falsas que caen dentro de la falsa alarma permitida de 0.01.
Conclusiones del capítulo 3
This implies a possible coincidence between the average of the target and the background, causing the target to have zero contrast. It is necessary to compare the output of the detector in a zone where the target. It is not possible to show a larger number of outputs of H0 and H1 because the movement of the quadrotor causes the target.
ASD contains a higher number of false detections, while ASD has a higher number of misses of the target.
Resultados experimentales
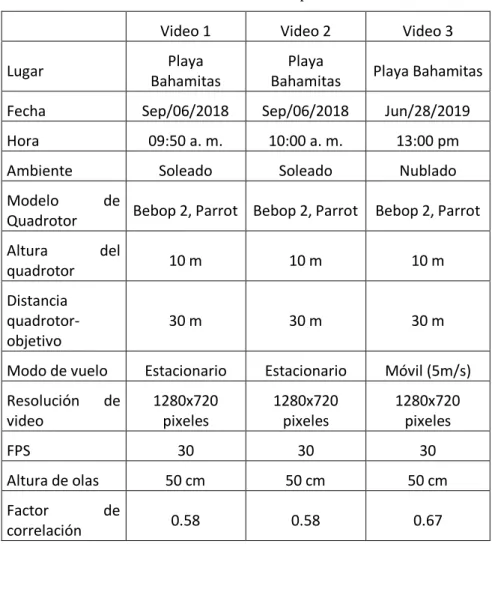
Videos seleccionados
En la Figura 4.1 se muestra una imagen correspondiente al video 1, donde se puede ver el mar y en el recuadro rojo está el nadador que será detectado. Además, para no procesar todos los píxeles de una imagen (1280x720) y reducir el tiempo de procesamiento, se selecciona un área de 100x100 píxeles; En la Figura 4.2 aparece una imagen de este vídeo recortado. Esta ventana, junto con el número de imágenes K (tercera dimensión), permite crear la matriz de procesamiento en la que se realizará la detección.
En la Figura 4.1 se puede ver que algunas áreas son muy oscuras y el cálculo del umbral basado en este conjunto podría llevar a que se apunten a áreas de mayor intensidad (falsas detecciones).
Análisis de separabilidad
El resultado de 400 imágenes se muestra usando los gráficos de la Figura 4.3, donde cada muestra contenía 10 imágenes con sus respectivos tamaños de ventana y se cambió el número de armónicos. Lo ideal es que los guiones de la Figura 4.3 no se superpongan, indicando que el objeto es completamente separable del fondo, en estos casos donde se produce superposición, el objetivo no se puede detectar o pueden aparecer detecciones falsas. El efecto de aumentar a p4 se observa en la Figura 4.3 c) yd) donde se utilizaron las mismas 400 imágenes y la misma área de análisis.
El aumento del número de armónicos afectó la capacidad de separar el mar del objeto, resultado que coincide con los gráficos de la Figura 3.6. Ahora, para evaluar el efecto de aumentar el número de imágenes procesadas para cada muestra, realizamos un análisis del mismo video y las mismas 400 imágenes, los resultados se muestran en la Figura 4.4. a)b).

Monitoreo con quadrotor en vuelo estacionario
75. video como se muestra en la Figura 4.5, donde se puede observar que la imagen del nadador estaba dividida en subimágenes. De lo anterior se deduce que MASD proporciona una mayor separabilidad, y esto se demuestra en la Figura 4.6 y Figura 4.7. La Figura 4.7 c) yd) muestra el mejor caso obtenido, ya que aumentar p o disminuir K produjo imágenes binarias inútiles.
Con ventanas 2x2 el resultado se muestra en la Figura 4.9 y se puede observar que MASD nuevamente supera a ASD en el número de detecciones falsas y en una mayor densidad de puntos blancos en las áreas correspondientes a la posición del objetivo. a B C D).
Monitoreo con quadrotor en movimiento
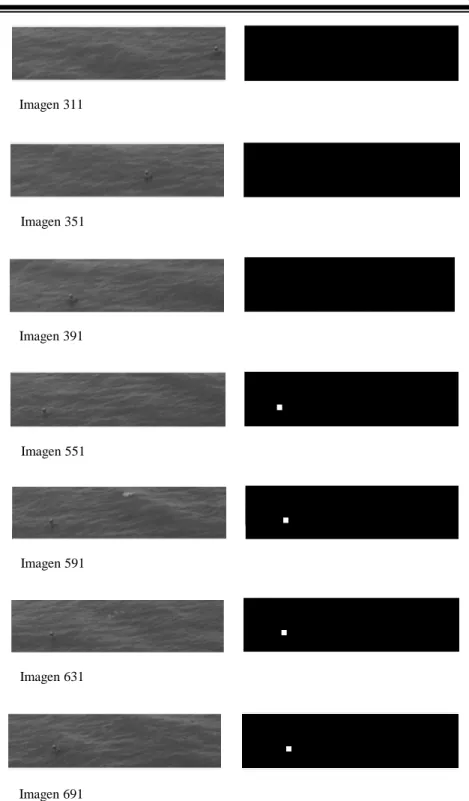
La serie de imágenes en la Figura 4.12 muestra el objetivo en diferentes posiciones, por lo que se dibujó un cuadro rojo alrededor del objeto en la Figura 4.12 a), en las siguientes imágenes el cuadro se volvió a dibujar en las mismas coordenadas que el punto anterior, con. El seguimiento a través de cinco imágenes mostró deficiencias en la detección, ya que el objetivo en movimiento no fue detectado y aparecieron muchas detecciones falsas. Se decidió reducir la cantidad de imágenes procesadas; La Figura 4.13 muestra los resultados del uso de 4 y 3 imágenes con ventanas de 10x10.
El monitoreo se realizó utilizando tres imágenes como se muestra en la Figura 4.14. Se observa que el objetivo se detectó en el orden en que se mueve el cuadrotor, objetivo que anteriormente no se podía lograr con un mayor número de imágenes procesadas.
Control visual en un quadrotor
Estas mediciones de imágenes se utilizan para calcular un vector de k características visuales, s(m(t),a), donde a es un conjunto de parámetros que representan conocimiento adicional sobre el sistema (parámetros intrínsecos de la cámara o modelos tridimensionales). Para hacer esto, necesitamos la relación entre la variación temporal de s y la velocidad de la cámara. Denotemos la velocidad de la cámara por 𝐯𝑐 = (𝑣𝑐,𝑐), siendo 𝑣𝑐 la velocidad lineal instantánea del origen del fotograma de la cámara y 𝑐 la velocidad angular instantánea del fotograma de la cámara.
Usando (4.1) y (4.2), obtenemos inmediatamente la relación entre la velocidad de la cámara y el cambio de tiempo del error.
Conclusiones de capítulo 4
In practice, the shape, size and position of the target are unknown, meaning that the target does not completely cover the analysis window (subpixel tarjets) and has a low signal-to-background ratio (SBR). The hypothesis test for ASD under (H1) accepts only the presence of the usable signal plus channel noise. Figures 5 and 6 show that as the analysis window increases, the ability to separate the sea from the target grows because the target is present in a greater number of frames of the data volume; therefore, the energy under H1 increases.
It has already been shown that p and the window size affect the quality of the detectors.
Conclusión