Este documento contiene información sobre el trabajo de grado “Control PID Digital para Sistemas Terminos Basados en un Microcontrolador PIC”. Finalmente, también se presenta el coprocesador del servidor web Siteplayer, utilizado para la comunicación remota a través de la Ethernet de datos del controlador.
Objetivo General
Objetivos Específicos
Alcances
Limitaciones
Filtros Digitales. [1]
Estructuras Directas
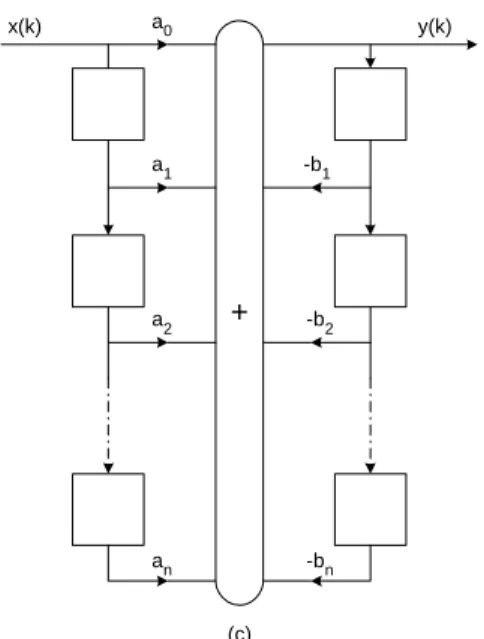
La transferencia de la estructura del filtro tiene la misma función de transferencia que la estructura original. Si transponemos la estructura 1D, obtenemos la estructura 2D que se muestra en la Figura 4.1b.
Módulos De Segundo Orden
En el dominio del tiempo... 4.5) Esta es la ecuación en diferencias para la tercera estructura directa (3D) que se puede ver en el diagrama de bloques de la Figura 4.1(c). En (4.6) y (4.7), primero se debe calcular y( )k para minimizar los retrasos de tiempo de cálculo entre la muestra de entrada x( )kT y la generación de la salida y(kT +τC), donde τc representa el cálculo de el filtro de retardo.

Implementación En Microcomputadora De Filtros Digitales
Controladores y acciones de Control [2]
Clasificación de controladores Industriales
Controlador Automático, actuador y sensor (elemento de medición)
Para un controlador de acción de control proporcional, la relación entre la salida del controlador u(t) y la señal de error e(t) es la misma. La señal de control u(t) tiene un valor distinto de cero cuando la señal de error e(t) es cero.

Controladores PID digitales [1]
Ajuste empírico de controladores PID [3]
Método de la curva de reacción de Ziegler-Nichols
Los parámetros del controlador PID propuesto por Ziegler y Nichols a partir de la curva de reacción se determinan a partir de la Tabla 4.1. Parámetros de controladores PID según el método de la curva de reacción de Ziegler-Nichols.
Transductores de temperatura [4]
Termopares o termocuplas
Cuando el termopar (o "unión caliente") alcanza la temperatura a medir (por ejemplo, en un horno), los conductores se conectan al punto de medición ("unión fría"), cuya temperatura es diferente (Figura 4.9). El termopar Cu-Constantan se utiliza en un rango de temperatura inferior al termopar Fe-Constantan (500 a 600 ºC); Tiene el mismo precio que este último, pero su linealidad es mayor.
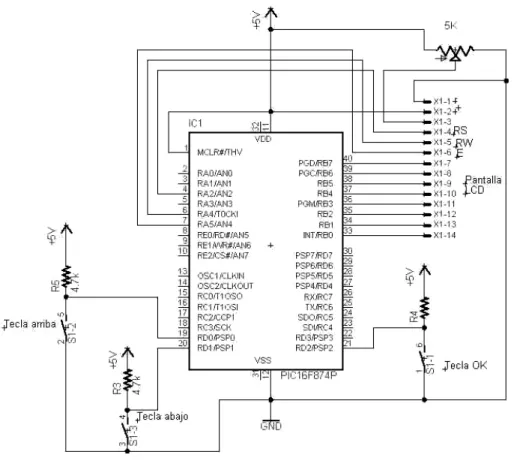
Microcontroladores PIC [5]
9 El programa está escrito en un archivo de texto con extensión .asm 9 Se compila mediante la aplicación MPLAB. 9 El programa ya compilado se carga en un archivo con extensión .hex mediante un circuito especial.

El Servidor Web Siteplayer
Descripción de SitePlayer
Se utilizan herramientas de creación de páginas web estándar para crear páginas para SitePlayer. Las páginas web se descargan a la memoria Flash de SitePlayer a través de la interfaz de red.
Acondicionador de señal para termocupla
Donde RF es la resistencia de retroalimentación y R1 es la resistencia de entrada. Para una ganancia de 3,33, los valores resultaron en los cálculos de. Para utilizar los tres canales analógicos y tener una precisión de 1 dígito, era necesario dividir el voltaje en rangos. La ganancia de este amplificador es 1,5 y es de tipo no inversor, sus resistencias se calculan de la misma forma mencionada en (5.1).
En los otros dos canales se hace de la siguiente manera: Se utiliza un divisor de voltaje para generar las referencias de 3.33V y 6.67V con tres resistencias iguales a una referencia fija de 10V y hay dos restadores con ganancia de 1.5 donde uno de ella. las entradas desplegables, en un caso, son de 3,33V; la otra entrada proviene de la salida del acondicionador termopar, por lo que este restador tendrá una salida de 0 a 5 voltios cuando el acondicionador esté en el rango de 3.33 V a 6.66 V (100 a 200 ºC), esta salida será alimentada en el segundo de los tres canales analógicos.

Interfaz con el usuario
Los diodos en las salidas de este circuito tienen el objetivo de limitar el voltaje en la entrada analógica a no mayor que la referencia fija de 5V que tienen. Donde KP (display), TV (display) y TN (display) son los valores que se ingresarán con los botones y se mostrarán en la pantalla. La razón por la que los datos deben ingresarse de esta manera se debe a la memoria limitada del PIC, ya que se utilizan muchas funciones del PIC, como convertidores A/D, comunicación en serie y puertos de entrada/salida digitales. (para gestionar el display, alarmas y teclado), pero también faltan ciertas funciones que se añaden, como la gestión de registros históricos de temperatura, comunicación con el ordenador, por lo que se han añadido estas conversiones de parámetros del controlador.
Las siguientes imágenes muestran los textos que aparecen en la pantalla LCD cuando el programa se está ejecutando.
Ingeniería Humana Empleada en el diseño de la Interfaz. [7]
El análisis y diseño semántico define cada acción solicitada por el usuario y cada acción producida por la máquina. Diseñar el entorno de usuario para formar un entorno adecuado para el usuario, además de considerar los elementos del sistema que interactúan como: hardware, software, base de datos y otros, debe incluir instalaciones físicas. En el análisis y diseño semántico, cada una de las acciones a realizar por el usuario se define mediante palabras o abreviaturas comprensibles para la mayoría de las personas y se reflejan en cada una de las opciones que tiene el menú en pantalla, descritas en el apartado anterior. .
En el diseño del entorno de usuario queríamos hacer la interfaz de usuario lo más simple posible, solo controlar las opciones a través de un menú y solo cambiar los valores a través de tres interruptores, además la fuente en pantalla es bastante grande y legible.
Etapa de potencia
La razón para usar un PWM externo y no el que viene con el microcontrolador es que el PWM interno tiene una frecuencia muy alta y no puede controlar eficazmente la temperatura, que es una variable lenta porque se ajusta al ciclo de CA demasiadas veces (60 Hz). ), por lo que se utiliza una señal proporcional a la variable de salida del filtro (también escalada) para generar la señal PWM, permitiendo así transcurrir un cierto número de ciclos AC en función del tiempo. hasta la altura de salida.
Conexión de Siteplayer con controlador PID
Justificación de los Componentes Empleados
La siguiente tabla muestra una cotización creada en el sitio http://microcontrollershop.com/default.php?cPath=112_184. Está claro que el 16F877A mantiene un precio medio respecto al resto de modelos, teniendo los de abajo el inconveniente de no contar con los suficientes pines de entrada/salida digitales necesarios para la aplicación, los de la familia 18F. tienen características más avanzadas, pero no tienen nada que ver con el proyecto y tienen un costo mayor aquí en el país. Por lo tanto, se han preferido las capacidades intermedias del 16F877A. Se eligió el termopar tipo J por su capacidad para medir temperatura en el rango propuesto en este proyecto.
Además, la preferencia por un termopar tipo J se debió a que el acondicionador de termopar AD594 incorporado es más barato que el acondicionador de termopar tipo K AD594 (contra $21 por el AD595) disponible localmente (citado en Ventas de productos electrónicos por J&R Electronics).
Programa del controlador
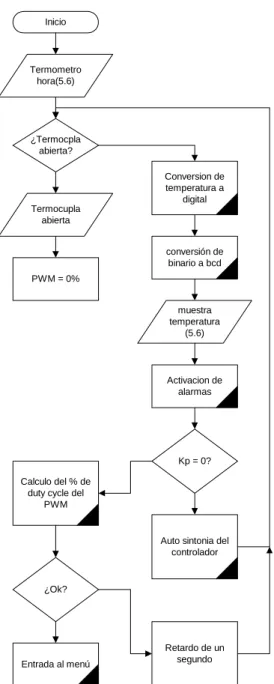
Servidor web Siteplayer, este coprocesador ha sido necesario adquirir por la razón que el controlador debe comunicarse a través del protocolo TCP/IP, para evitar escribir demasiado código en el PIC, se utiliza su puerto serie asíncrono para comunicarse con Siteplayer, lo que hará los datos en la memoria del microcontrolador disponibles en el protocolo TCP/IP. Relé de estado sólido, fue necesario utilizar este dispositivo porque se necesita conmutar 110V o 220V y es necesario sincronizar con la línea AC para este fin y sin producir el ruido que implica un relé magnético normal, ya tiene circuito de alimentación interno. , que son necesarios para realizar la sincronización con la línea y la conmutación. El diagrama de flujo que representa la entrada al controlador y la entrada al menú es el siguiente: En los bloques de entrada/salida, se hace referencia a las pantallas que representan especificando el número entre paréntesis.
Las funciones de activación de alarma y muestreo de temperatura se muestran a continuación en la Figura 5.21.
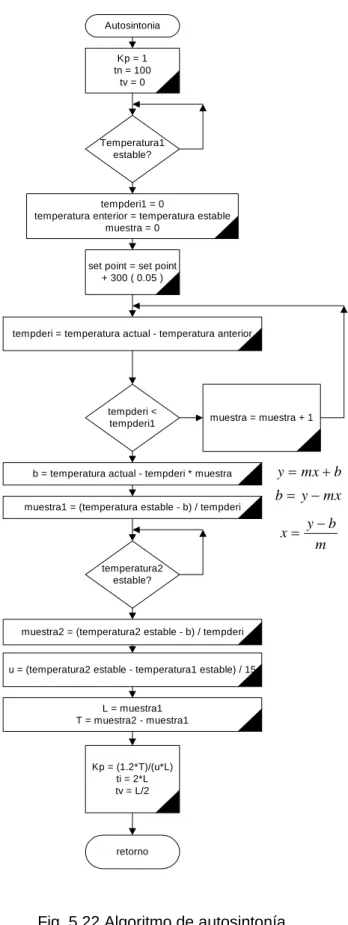
Etapa de Autosintonía
La idea básica del algoritmo es encontrar el punto de inflexión de la respuesta de la planta, luego usando la ecuación del punto de pendiente se encuentra la recta tangente a dicho punto, se evalúa para y=y0 y se encuentra t1, seguido de eso se evalúa para y= ymax y se obtiene t2, y0 es la respuesta de bucle abierto del sistema para cualquier valor de referencia, ymax es la respuesta de bucle abierto del sistema para el valor de referencia anterior más el cinco por ciento de la temperatura máxima de control, para en este caso concreto el cinco por ciento de los trescientos quince grados centígrados. U0 es la referencia utilizada al inicio del autoajuste y Uref es la referencia anterior más quince grados Celsius. Luego de obtener estos datos, se evalúan en las ecuaciones de la Tabla 4.1 y se encuentran KP, ti y td.
Conclusiones
El coprocesador del servidor web Siteplayer tiene muchas aplicaciones en el ámbito de la industria, porque permite actualizar los equipos para que reciban una dirección IP y se conozca su estado vía Internet, sin tener que hacer ajustes con tarjetas de red comerciales ni escribirlo completo. Protocolo TCP/IP dentro de la memoria limitada de un PIC o un microprocesador y además tiene un método de configuración sencillo y económico. Ya hay mucha documentación disponible para que en el futuro se puedan realizar aún más proyectos.
Recomendaciones
Se resta de 4 porque por encima de 4 //la salida siempre estará apagada y serializada por el mssp*/ de la imagen. Cuando estás en el menú, esta función presenta el cursor que es <- para esto //primero le decimos a la pantalla la dirección donde escribirla, la dirección //se almacena en lin_pun y luego le decimos a la pantalla que escriba la flecha que devuelve //el valor en hexadecimal. Toma el valor de la tabla de texto a la que apunta i para mostrar el mensaje que contiene.
Primero se muestra el mensaje de calibración en la pantalla, luego se muestra //el valor de calibración actual y el usuario puede aumentar o disminuir esta variable usando //las teclas arriba y abajo. Del mismo modo, si alcanza el valor máximo de la //variable y presiona la tecla arriba, la variable seguirá teniendo el valor máximo. Evalúelo a continuación, usando la ecuación de la pendiente del punto y resolviendo //para el tiempo.
El número que se mostrará como temperatura será bcd_ini; // suma algebraica del valor de transformación } // con valor de calibración. Para registrar las pruebas realizadas se registraron diversos gráficos del comportamiento del sistema a través de una página de Excel que genera automáticamente el gráfico, tomando datos de muestras que se encuentran en una tabla en el sitio web interno de Siteplayer.