PARA EL ROBOT Y CIRCUITO DE COMUNICACIÓN ENTRE LA GARRA Y EL SISTEMA DE CONTROL DE LA CÉLULA DE FABRICACIÓN FLEXIBLE. Diseñar, simular y construir una pinza robótica con circuito de control de presión para la pinza en la celda de producción flexible de la Facultad de Mecatrónica. Simular el comportamiento de las piezas de agarre bajo fuerzas en la celda de fabricación flexible.
Para controlar la garra se desarrolló un sistema sencillo que busca un fácil acoplamiento a los brazos existentes con otros sistemas de control y busca la protección del actuador de la garra.
PLANTEAMIENTO Y JUSTIFICACIÓN DEL PROBLEMA
DATOS ESPECÍFICOS DEL LUGAR DE APLICACIÓN
ANTECEDENTES
ESTADO DEL ARTE
MARCO TEÓRICO
LA GARRA COMO ELEMENTO TERMINAL DEL ROBOT
Las garras se usarían para agarrar y sostener un objeto, generalmente la pieza de trabajo, durante el ciclo de trabajo del robot. Hay varios métodos de sujeción que se pueden utilizar, además de los métodos mecánicos obvios de sujetar la pieza de trabajo entre dos o más dedos. Se utilizaría una herramienta como miembro final en aplicaciones donde el robot necesita realizar una determinada operación en la pieza de trabajo.
Entre los parámetros de la pinza cabe destacar su peso (que incide en la inercia del robot), el equipo de accionamiento y la capacidad de control. El robot carga una pieza en bruto en el proceso y descarga una pieza terminada. El robot debe cargar la pieza bruta para los materiales en las máquinas, pero la pieza se extrae de otra manera.
En una operación de prensa, el robot se puede programar para cargar láminas de metal en la prensa, pero se permite que las piezas terminadas caigan de la prensa por gravedad. Generalmente se colocan sensores en la pinza para detectar su estado (abierto o cerrado). A la pinza se pueden incorporar otro tipo de sensores para controlar el estado de la pieza, sistemas de visión que incluyen datos geométricos de los objetos, detectores de proximidad, sensores de fuerza-par, etc.
Sin embargo, en otros casos las garras deben estar completamente desarrolladas, constituyendo un porcentaje importante de la aplicación total. La misión de los actuadores es generar el movimiento de los elementos de sujeción según las órdenes dadas por la unidad de control.
CLASIFICACIÓN DE MECANISMOS PARA LA GARRA
Al acercarse al objeto, dependiendo del mecanismo de la pinza, el dedo puede hacerlo con un desplazamiento paralelo a sí mismo o mediante una rotación respecto de un punto fijo de la pinza; Además, se puede utilizar un movimiento de rototraslación compuesto para el movimiento de los dedos. Los conjuntos de varillas pueden tener dos o tres puntos de articulación o juntas deslizantes, que se utilizan para ambos tipos de movimientos de los dedos. El mecanismo de leva en las pinzas se utiliza para movimientos de traslación de los dedos, generalmente impulsados por un actuador de rotación.
Cuando el mecanismo consta de un solo tornillo, es para el movimiento de los dedos por traslación, generalmente accionado por un actuador giratorio, con tornillos roscados a derecha e izquierda para controlar el cubo de cada dedo.
DISEÑO SISTEMÁTICO
MECANISMOS
- MECANISMO DE AGARRE
- ESTUDIOS DEL SISTEMA DE AGARRE
- MECANISMO DE BARRAS PARALELAS
- MECANISMO MOTRIZ
Para la parte superior e inferior, en este caso es la fuerza de sujeción y el mecanismo de transmisión de fuerza los que evitan que la pieza se caiga de la abrazadera. Desde el punto de vista del posicionamiento relativo entre la pinza y el objeto, el movimiento de traslación paralelo permite posicionar la pinza abierta (para agarre externo) con su manipulador, produciendo el cierre sin cambiar la altura del punto de contacto objetivo debido a la actuación de la pinza. Desde el punto de vista del mecanismo, la fuerza que ejerce la pinza para agarrar el objeto en la dirección del contacto es constante en cada punto del dedo donde se produce el contacto; Además, el ángulo entre la línea de contacto y la fuerza es siempre cero, evitando la posibilidad de deslizamiento en dirección perpendicular a la línea de contacto en el plano de sujeción.
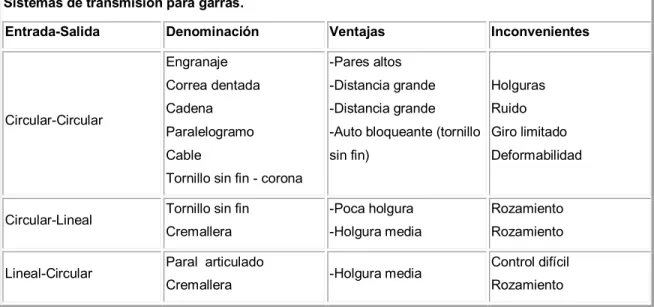
De acuerdo a los altos requerimientos de tracción en la punta de la garra, se decidió implementar un mecanismo de tornillo sin fin de corona que nos proporciona un troquel grande y baja velocidad de salida, además de un sistema autoblocante que le sirve. para extender la vida útil del actuador y reducir el consumo de energía.

TRANSMISIONES
- TORNILLO SIN FIN - CORONA
Es muy eficaz como reductor de velocidad, ya que una vuelta del tornillo produce un pequeño giro de la corona. Es un mecanismo que tiene muchas pérdidas por fricción entre los dientes, lo que obliga a utilizar un metal con bajo coeficiente de fricción y amplia lubricación. El tornillo (barrena) suele ser de acero y la corona de de bronce.

ACTUADORES
- MOTORES DE CORRIENTE CONTINÚA CONTROLADOS POR EXCITACIÓN
- CARACTERIZACIÓN DEL MOTOR Voltaje = 12 V
Servomecanismo: Este sistema responde muy bien al control de posición, pero como veremos más adelante, el control de posición no es la mejor opción. Motor DC: Esta opción es fácil de implementar, fácil de reemplazar y tiene un volumen reducido, que, a pesar de la baja potencia compensada por el sistema de transmisión de movimiento, cubre gran parte de los requerimientos actuales. Además, en los motores controlados por inducido existe un efecto estabilizador sobre la velocidad de rotación, causado por la retroalimentación intrínseca que tiene a través de la fuerza contraelectromotriz.
Por estas razones, de los dos tipos de motores de CC, el controlado por armadura se utiliza para el accionamiento del robot. Para mejorar el comportamiento de este tipo de motores, el campo de excitación se genera mediante imanes permanentes de manera que se observen fluctuaciones. Además, para reducir la inercia que tendría un rotor devanado, que es la armadura, se construye mediante una serie de bobinas serigrafiadas sobre un disco plano. Este tipo de rotor casi no tiene masa térmica, lo que aumenta los problemas de calentamiento por sobrecarga.
Las velocidades de rotación alcanzadas con estos motores oscilan entre 1000 y 3000 rpm. A estos suele ir seguido un bucle analógico que se cierra mediante una electrónica específica (actuador de motor). Sobre este bucle de velocidad se coloca un bucle de posición, donde las referencias son generadas por la unidad de control (microprocesador) en función del error entre la posición deseada y la real.
Por otro lado, no es posible mantener el par con el rotor parado más de unos segundos, debido al calentamiento que se produce en el colector. En este caso, los imanes de excitación se encuentran en el rotor y el devanado del inducido en el estator, lo que permite conmutar la corriente con ayuda de interruptores estáticos, que reciben la señal de conmutación a través de un detector de posición del rotor.
ANÁLISIS DE FUERZAS APLICADAS POR LA GARRA
SISTEMA DE CONTROL 1. VARIABLE DE CONTROL
- SISTEMA DE PARADA CONTROLADO POR CORRIENTE Una ves definida la variable de control y las limitantes del mismo se diseño un
- CIRCUITO DEL SISTEMA DE CONTROL
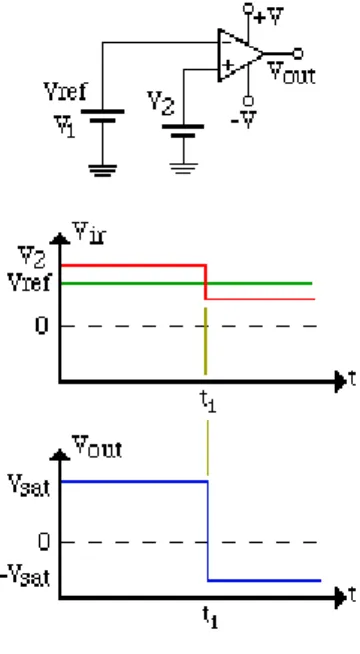
En la Figura 6 podemos ver un sistema de control de rotación en el que el voltímetro representa el punto donde se mide el valor de tensión correspondiente a la corriente en el actuador (ley de Ohm). SISTEMA DE PARADA CONTROLADA POR CORRIENTE Una vez definida la variable de control y sus limitaciones, se diseñó un sistema de control de corriente en el actuador mediante un comparador de voltaje conectado, con una resistencia en el circuito del motor y un trímero que permite determinar el punto máximo en el que operará el sistema. . activado para ajustar. Se puede utilizar un amplificador operacional para determinar cuál de las dos señales en las entradas es mayor.
Solo se necesita que una de estas señales sea un poco más grande para que la salida del amplificador operacional sea máxima, ya sea positiva (+Vsat) o negativa (-Vsat). En la gráfica se ve que el valor de entrada en V2 es mayor que el valor de V1 (que se usa como referencia y tiene un valor fijo) hasta que en algún momento t1, V2 cambia y ahora es menor que V1. Dado que V2 está conectado a la entrada no inversora de la operación, la salida (Vout) está en saturación positiva hasta llegar a t1, donde la salida ahora está en saturación negativa.
Este sistema de control pasivo está conectado a un microcontrolador que recibe la señal del comparador de voltaje (Figura 4) y determina si el actuador debe detenerse o no, dándole mayor flexibilidad al sistema al poder ignorar las señales de corriente pico producidas durante el arranque. motor. Debido a que la pinza es un sistema independiente del manipulador, el sistema de control tiene dos variables, una es la opción manual operada por dos botones en la caja de control que permite al operador abrir y cerrar la pinza de forma independiente, la otra opción está diseñada para facilitar En adaptación a un sistema computarizado, la entrada es proporcionada por dos bits de control, que cumplen la misma función que los botones. En la figura 9 vemos el circuito de control, que permite el giro del motor y el sensor de corriente en el mismo.

SENSORES DE FUERZA
- MUÑECA DETECTORA DE FUERZA
- DETECCION DE ARTICULACIONES
- SENSORES TACTILES
Medir este par puede ser sencillo ya que es proporcional a la corriente que fluye a través del motor y provoca dicho par. La medición del torque se realiza en las uniones del brazo y no en el efector final (abrazadera) como sería deseable, por lo que el torque indicado refleja no sólo la fuerza que se aplicará a la abrazadera, sino también la fuerza utilizada para mover la abrazadera. abrazadera. conclusión. Este es un tipo especial de sensor de fuerza porque en realidad consta de una serie de pequeños sensores de fuerza.
Cada uno de los sensores de fuerza que componen la matriz suele ser una almohadilla elastométrica, que al comprimirse cambia su resistencia eléctrica en proporción a la fuerza aplicada. La resolución de este tipo de sensores lógicamente vendrá dada por las dimensiones del conjunto de sensores. Un factor muy importante que puede suponer un problema a la hora de diseñar este tipo de sensores es el índice de desgaste de la superficie de contacto.
ANÁLISIS MECÁNICO DE LAS PIEZAS
- ANÁLISIS DE ESFUERZOS PARA EL “DEDO SIMPLE”
- ANÁLISIS DE ESFUERZOS PARA EL “DEDO MOTRIZ”
- ANÁLISIS PARA LA “BASE MANO”
- ANÁLISIS PARA LA “PUNTA DEDO”
- ANÁLISIS PARA LA “Corona”
- ANÁLISIS PARA EL “Tornillo sin fin”
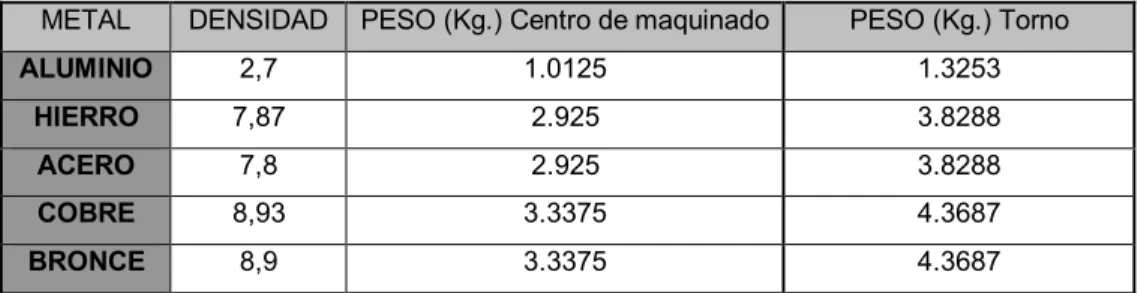
MATERIALES
VISTA EN EXPLOSIÓN DE LA GARRA
CONCLUSIONES
BIBLIOGRAFÍA
ANEXOS